
Full-Field Comparison of MRV and CFD of Gas Flow through Regular Catalytic Monolithic Structures

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Method
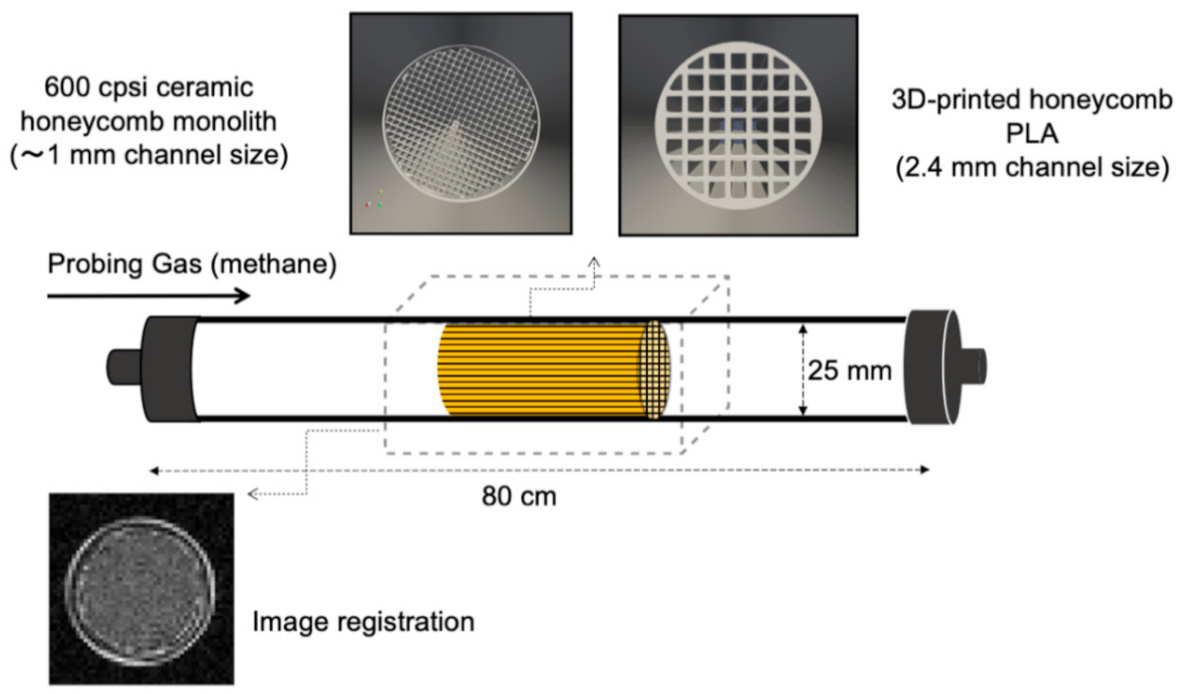
2.1. Experimental Setup
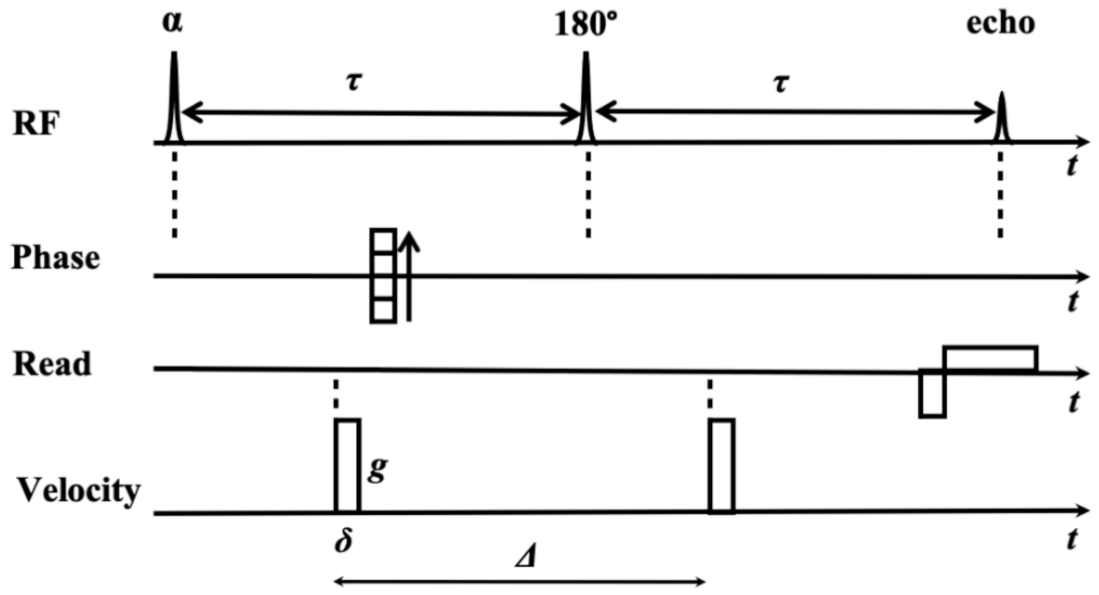
2.2. MRV Sequence
2.3. Error Estimation in MRV Measurements
2.4. NMR Displacement Measurements
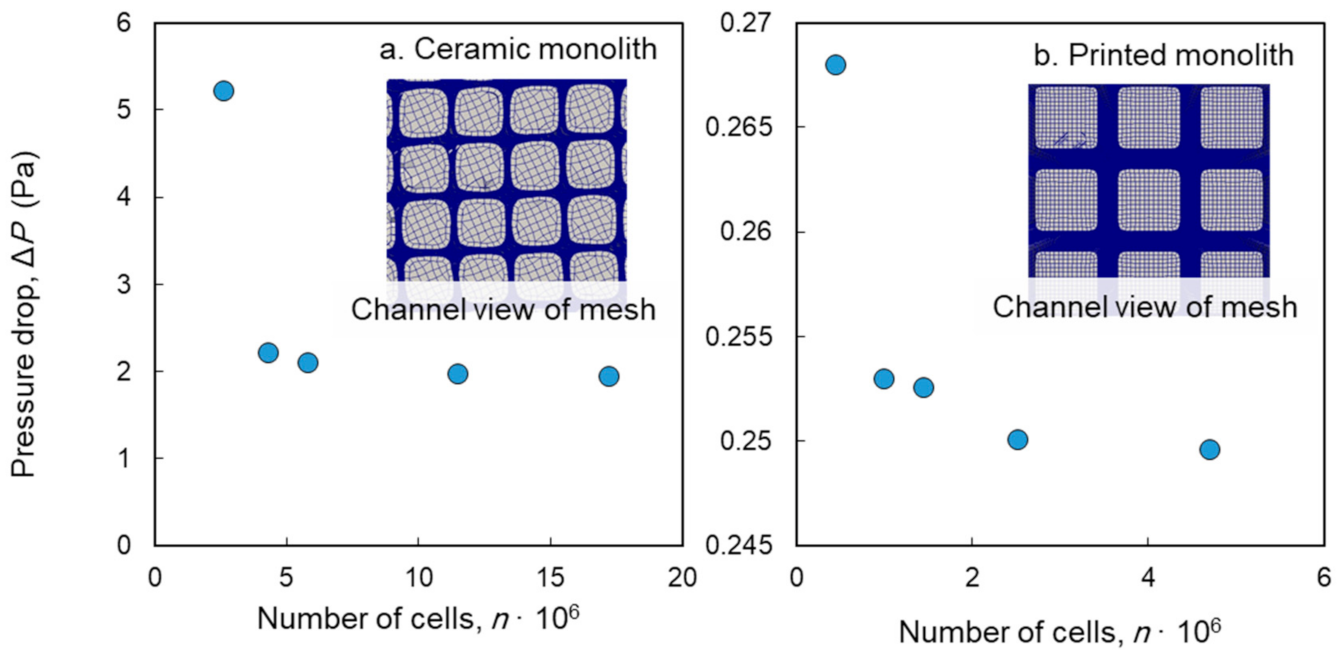
2.5. CFD Model
3. Result and Discussion
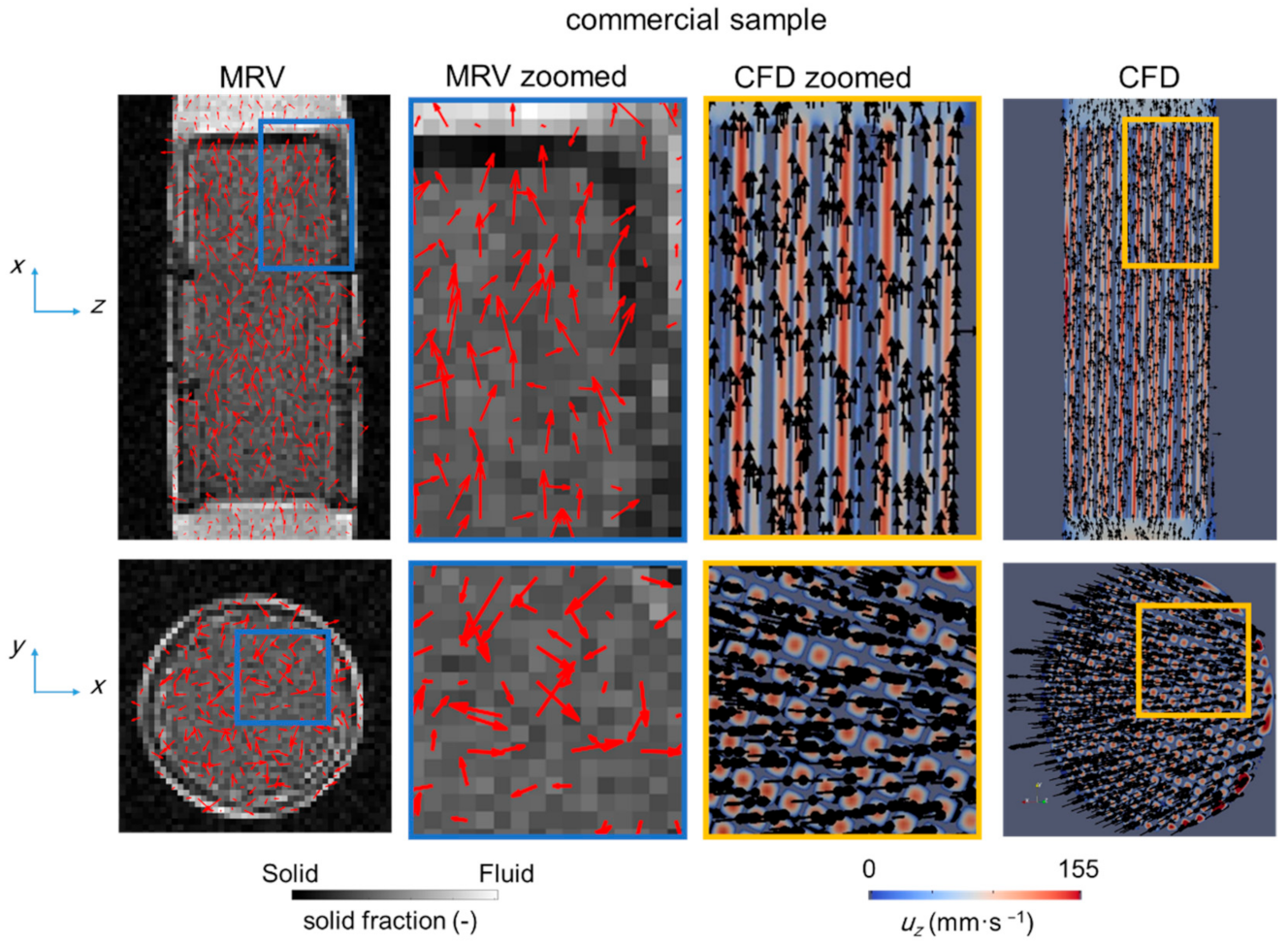
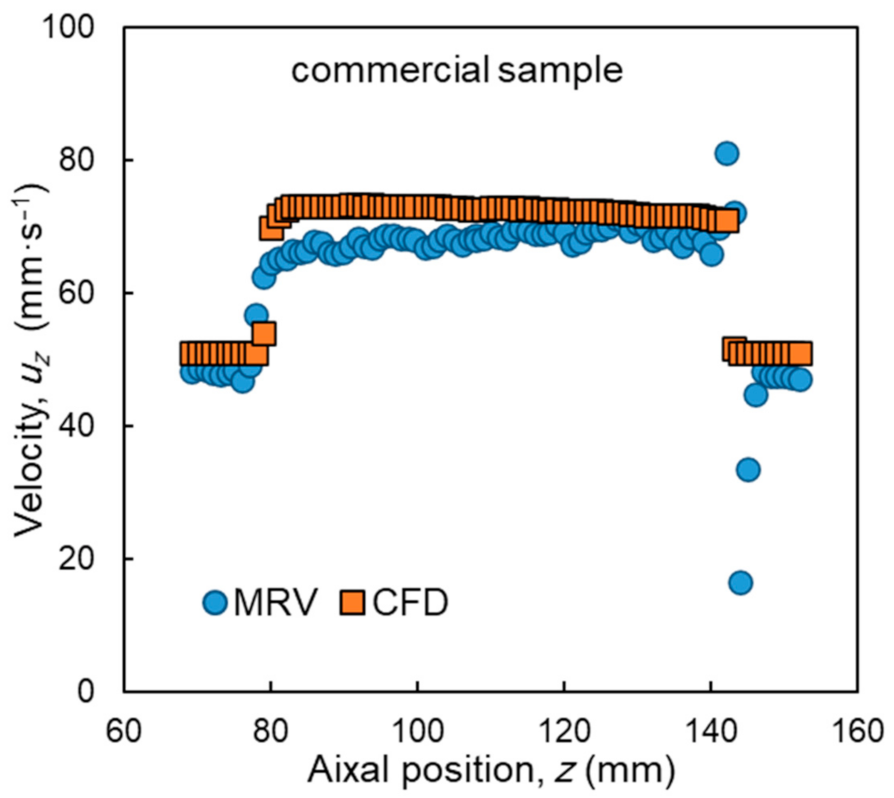
3.1. Commercial Honeycomb
3.1.1. Comparison of Velocity Fields
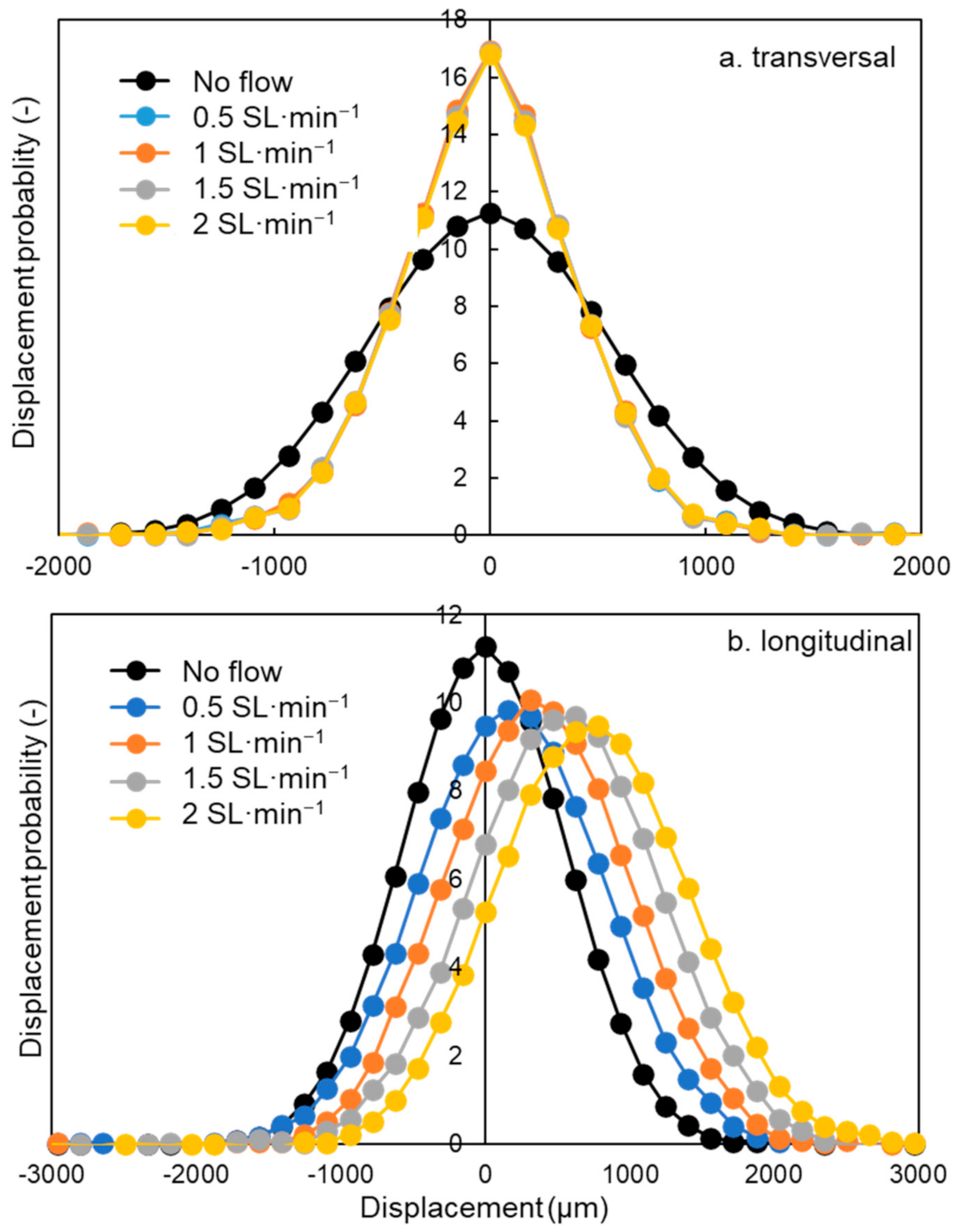
3.1.2. Radial and Axial Dispersion in Monolith Channels
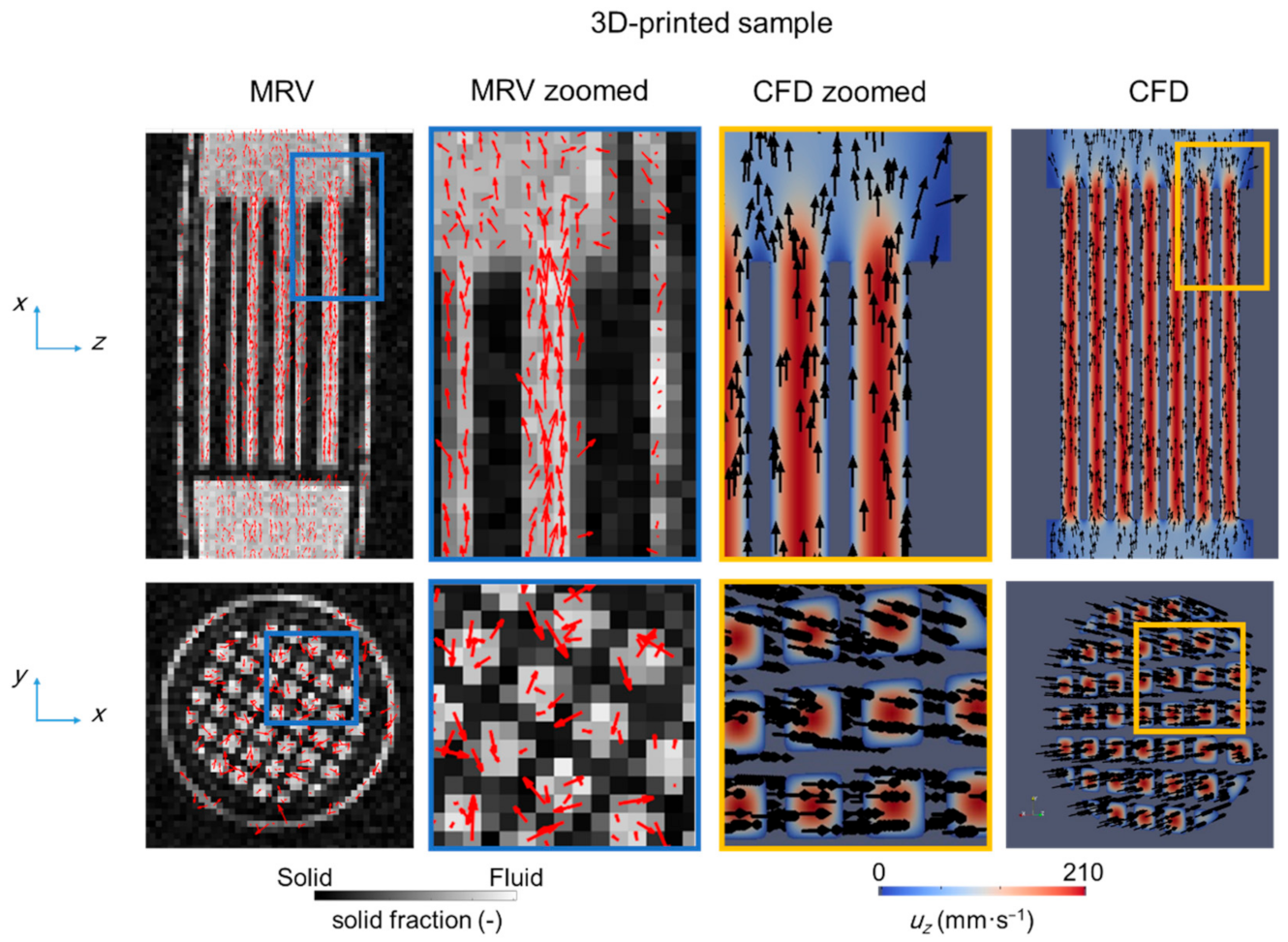
3.2. The 3D-Printed Honeycomb
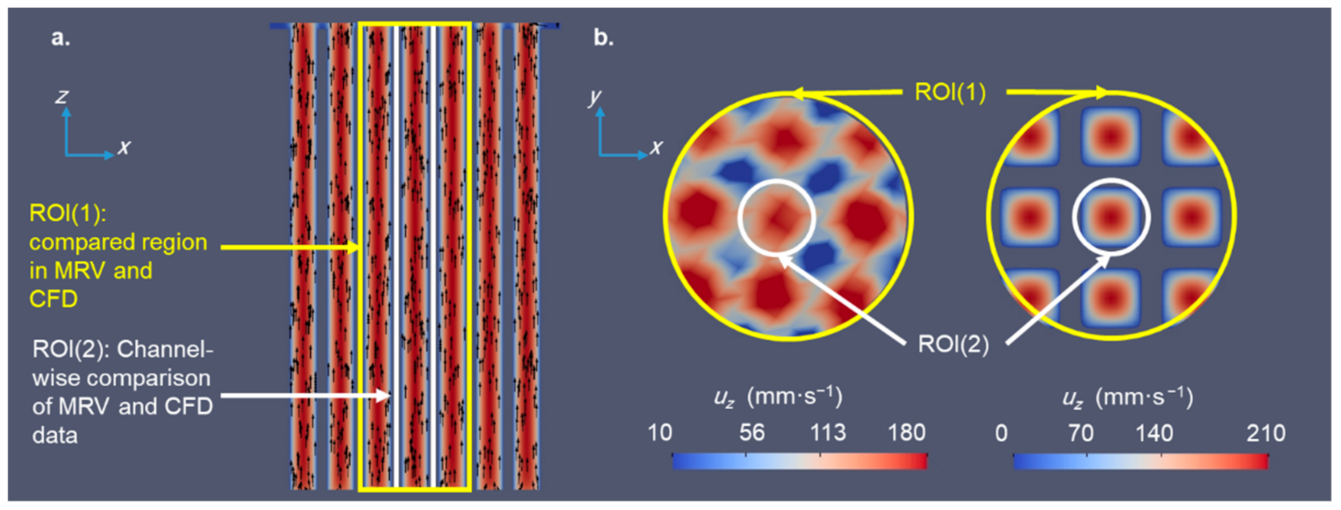
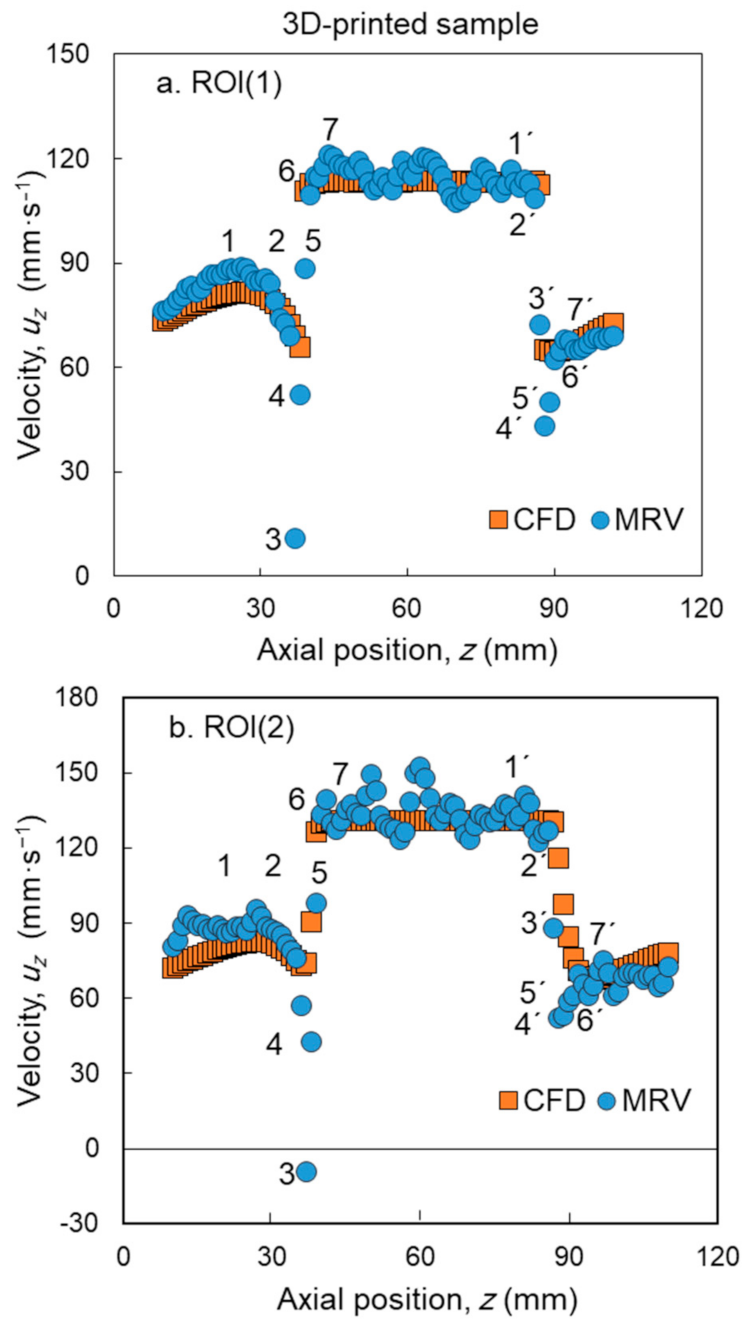
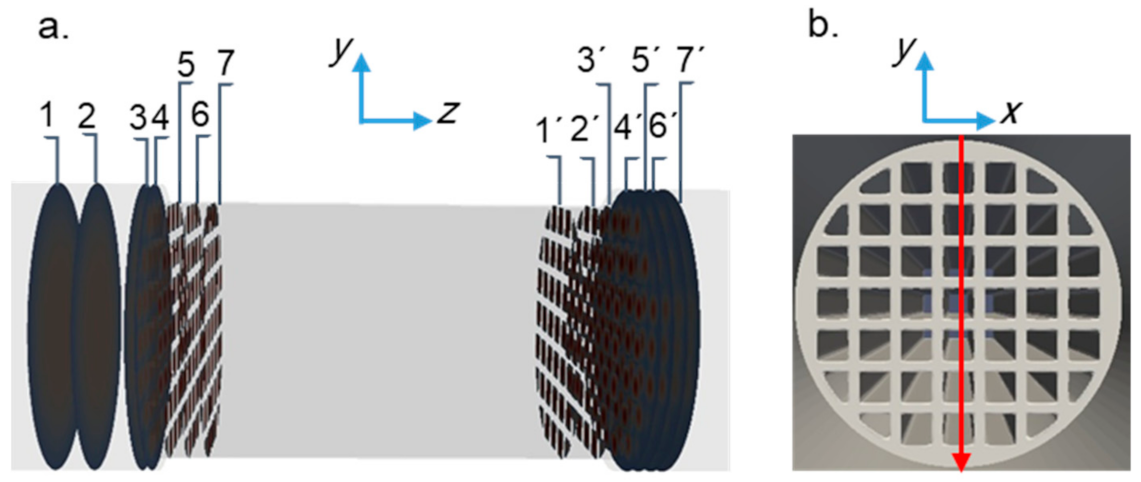
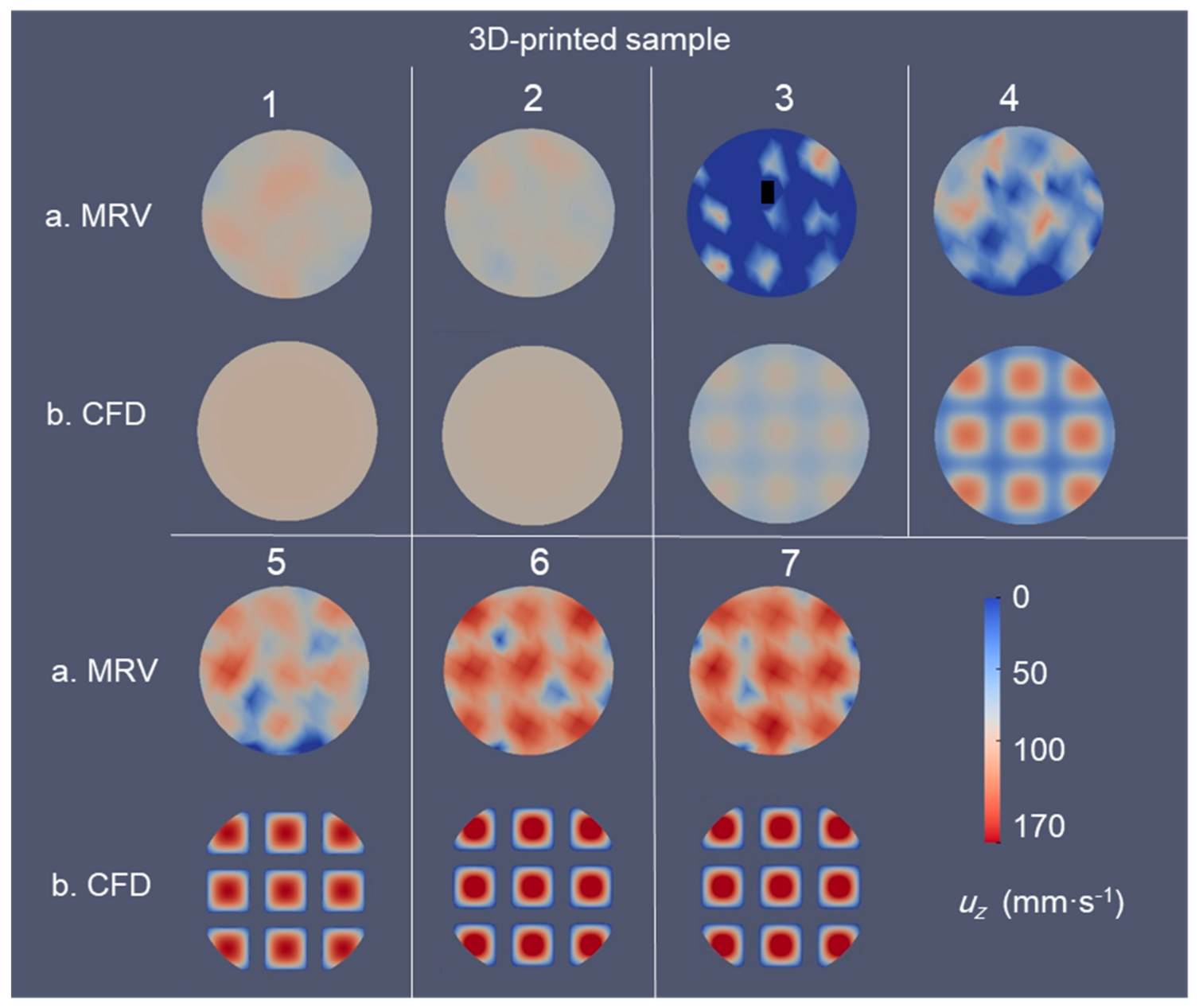
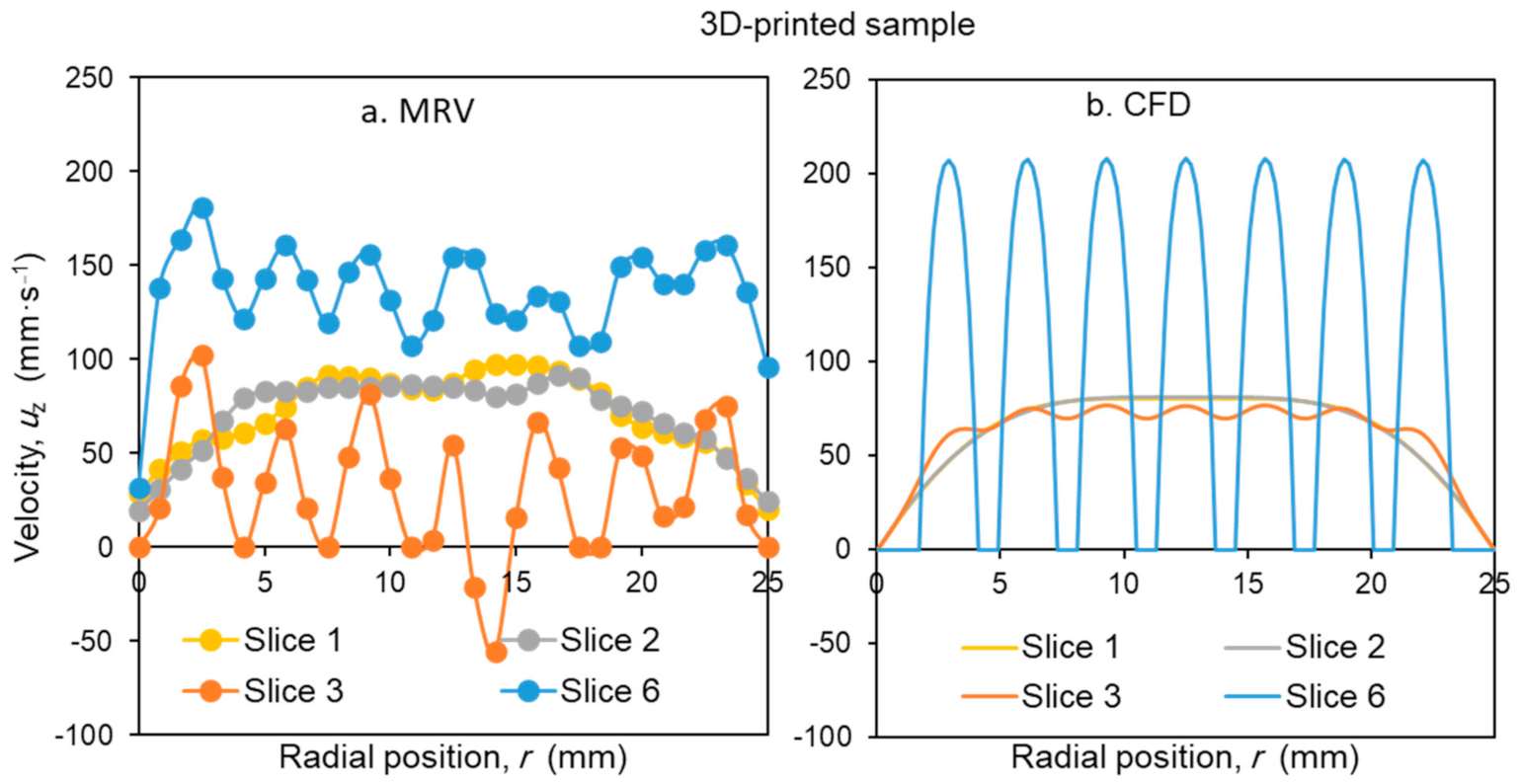
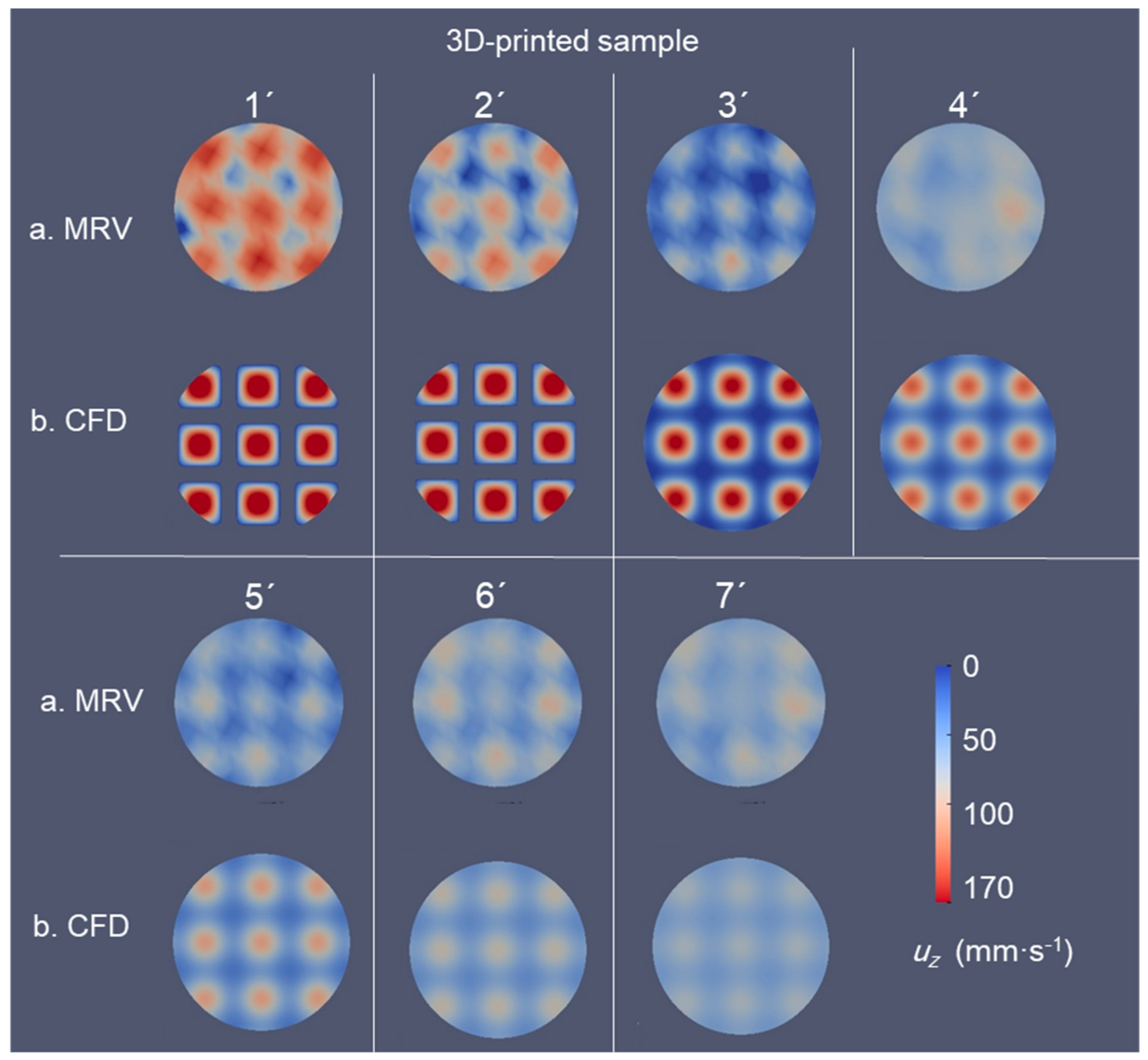
3.2.1. Comparison of Velocity Fields for 3D-Printed Honeycomb
3.2.2. Upstream Flow and Downstream Flow
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Latin | |
| T2 | Transversal relaxation time (s) |
| TE | Echo time (s) |
| TR | Repetition time (s) |
| RF | Radio frequency (s−1) |
| Diffusion coefficient (m2·s−1) | |
| usup | Superficial velocity (m·s−1) |
| VENC | Velocity encoding (mm·s−1) |
| Average velocity (mm·s−1) | |
| z | axial direction |
| u | Velocity vector (m·s−1) |
| Pressure drop (Pa) | |
| d | Vessel diameter (m) |
| p | Pressure (Pa) |
| Re | Reynolds number (–) |
| Displacement length (µm) | |
| D | Dispersion coefficient (m2·s−1) |
| r | Radial coordinate (mm) |
| Greek | |
| Flow encoding duration (ms) | |
| Flow encoding delay (ms) | |
| Observation time (ms) | |
| Diffusion time (ms) | |
| Standard deviation | |
| Fluid density (kg·m−3) | |
| Dynamic viscosity (Pa·s) | |
| Kinematic viscosity (m2·s−1) | |
References
- Eggenschwiler, P.D.; Tsinoglou, D.N.; Seyfert, J.; Bach, C.; Vogt, U.; Gorbar, M. Ceramic foam substrates for automotive catalyst applications: Fluid mechanic analysis. Exp. Fluids 2009, 47, 209–222. [Google Scholar] [CrossRef]
- Donsì, F.; Cimino, S.; Di Benedetto, A.; Pirone, R.; Russo, G. The effect of support morphology on the reaction of oxidative dehydrogenation of ethane to ethylene at short contact times. Catal. Today 2005, 105, 551–559. [Google Scholar] [CrossRef]
- Neumann, B.; Elkins, T.W.; Dreher, W.; Hagelin-Weaver, H.; Nino, J.C.; Bäumer, M. Enhanced catalytic methane coupling using novel ceramic foams with bimodal porosity. Catal. Sci. Technol. 2013, 3, 89–93. [Google Scholar] [CrossRef]
- Lucci, F.; Della Torre, A.; Montenegro, G.; Dimopoulos Eggenschwiler, P. On the catalytic performance of open cell structures versus honeycombs. Chem. Eng. J. 2015, 264, 514–521. [Google Scholar] [CrossRef]
- Van Gulijk, C.; Linders, M.J.G.; Valdés-Solís, T.; Kapteijn, F. Intrinsic channel maldistribution in monolithic catalyst support structures. Chem. Eng. J. 2005, 109, 89–96. [Google Scholar] [CrossRef]
- Agrawal, G.; Kaisare, N.S.; Pushpavanam, S.; Ramanathan, K. Modeling the effect of flow mal-distribution on the performance of a catalytic converter. Chem. Eng. Sci. 2012, 71, 310–320. [Google Scholar] [CrossRef]
- Gladden, L.F.; Sederman, A.J. Recent advances in flow MRI. J. Magn. Reson. 2013, 229, 2–11. [Google Scholar] [CrossRef]
- Han, S.I.; Pierce, K.L.; Pines, A. NMR velocity mapping of gas flow around solid objects. Phys. Rev. E-Stat. Nonlinear Soft Matter Phys. 2006, 74, 016302. [Google Scholar] [CrossRef] [Green Version]
- Harel, E.; Granwehr, J.; Seeley, J.A.; Pines, A. Multiphase imaging of gas flow in a nanoporous material using remote-detection NMR. Nat. Mater. 2006, 5, 321–327. [Google Scholar] [CrossRef] [Green Version]
- Mirdrikvand, M.; Ilsemann, J.; Thöming, J.; Dreher, W. Spatially Resolved Characterization of the Gas Propagator in Monolithic Structured Catalysts Using NMR Diffusiometry. Chem. Eng. Technol. 2018, 41, 1871–1880. [Google Scholar] [CrossRef]
- Kovtunov, K.V.; Lebedev, D.; Svyatova, A.; Pokochueva, E.V.; Prosvirin, I.P.; Gerasimov, E.Y.; Bukhtiyarov, V.I.; Müller, C.R.; Fedorov, A.; Koptyug, I.V. Robust In Situ Magnetic Resonance Imaging of Heterogeneous Catalytic Hydrogenation with and without Hyperpolarization. ChemCatChem 2019, 11, 969–973. [Google Scholar] [CrossRef]
- Newling, B. Gas flow measurements by NMR. Prog. Nucl. Magn. Reson. Spectrosc. 2008, 52, 31–48. [Google Scholar] [CrossRef]
- Bouchard, L.-S.; Burt, S.R.; Anwar, M.S.; Kovtunov, K.V.; Koptyug, I.V.; Pines, A. NMR Imaging of Catalytic Hydrogenation in Microreactors with the Use of para-Hydrogen. Science 2008, 319, 442–445. [Google Scholar] [CrossRef] [Green Version]
- Koptyug, I.; Altobelli, S.; Fukushima, E.; Matveev, A.; Sagdeev, R. Thermally Polarized (1)H NMR Microimaging Studies of Liquid and Gas Flow in Monolithic Catalysts. J. Magn. Reson. 2000, 147, 36–42. [Google Scholar] [CrossRef] [PubMed]
- Koptyug, I.V.; Ilyina, L.Y.; Matveev, A.V.; Sagdeev, R.Z.; Parmon, V.N.; Altobelli, S.A. Liquid and gas flow and related phenomena in monolithic catalysts studied by 1H NMR microimaging. Catal. Today 2001, 69, 385–392. [Google Scholar] [CrossRef]
- Gladden, L.F.; Mitchell, J. Measuring adsorption, diffusion and flow in chemical engineering: Applications of magnetic resonance to porous media. New J. Phys. 2011, 13, 035001. [Google Scholar] [CrossRef]
- Sankey, M.H.; Holland, D.J.; Sederman, A.J.; Gladden, L.F. Magnetic resonance velocity imaging of liquid and gas two-phase flow in packed beds. J. Magn. Reson. 2009, 196, 142–148. [Google Scholar] [CrossRef] [PubMed]
- Ramskill, N.P.; York, A.P.E.; Sederman, A.J.; Gladden, L.F. Magnetic resonance velocity imaging of gas flow in a diesel particulate filter. Chem. Eng. Sci. 2017, 158, 490–499. [Google Scholar] [CrossRef]
- Ramskill, N.P.; Gladden, L.F.; York, A.P.E.; Sederman, A.J.; Mitchell, J.; Hardstone, K.A. Understanding the operation and preparation of diesel particulate filters using a multi-faceted nuclear magnetic resonance approach. Catal. Today 2013, 216, 104–110. [Google Scholar] [CrossRef]
- Cooper, J.D.; York, A.P.E.; Sederman, A.J.; Gladden, L.F. Measuring velocity and turbulent diffusivity in wall-flow filters using compressed sensing magnetic resonance. Chem. Eng. J. 2019, 119690. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.L. Methods for Characterization of Mass Transport in Porous Materials. Ph.D. Thesis, Universität Bremen, Bremen, Germany, 2017. [Google Scholar]
- Benjamin, S.F.; Haimad, N.; Roberts, C.A.; Wollin, J. Modelling the Flow distribution through automotive catalytic converters. Proc. Inst. Mech. Eng. Part C 2015, 215, 379–383. [Google Scholar] [CrossRef]
- Zhang, L. International Journal of Heat and Mass Transfer Flow maldistribution and thermal performance deterioration in a cross-flow air to air heat exchanger with plate-fin cores. Int. J. Heat Mass Transf. 2009, 52, 4500–4509. [Google Scholar] [CrossRef]
- Liu, Z.; Benjamin, S.F.; Roberts, C.A. Pulsating Flow Maldistribution within an Axisymmetric Catalytic Converter-Flow Rig Experiment and Transient CFD Simulation. 2003-01-3070. SAE Tech. Paper 2003. [Google Scholar] [CrossRef]
- Sadeghi, M.; Mirdrikvand, M.; Pesch, G.R.; Dreher, W.; Thöming, J. Full-field analysis of gas flow within open-cell foams: Comparison of micro-computed tomography-based CFD simulations with experimental magnetic resonance flow mapping data. Exp. Fluids 2020, 61, 1–16. [Google Scholar] [CrossRef]
- Onstad, A.J.; Elkins, C.J.; Medina, F.; Wicker, R.B.; Eaton, J.K. Full-field measurements of flow through a scaled metal foam replica. Exp. Fluids 2011, 50, 1571–1585. [Google Scholar] [CrossRef]
- Kovacev, N.; Li, S.; Zeraati-rezaei, S.; Hemida, H.; Tsolakis, A.; Essa, K. Effects of the internal structures of monolith ceramic substrates on thermal and hydraulic properties: Additive manufacturing, numerical modelling and experimental testing. Int. J. Adv. Manuf. Technol. 2020, 112, 1115–1132. [Google Scholar] [CrossRef]
- Badami, M.; Millo, F.; Zuarini, A.; Gambarotto, M. CFD Analysis and Experimental Validation of the Inlet Flow Distribution in Close Coupled Catalytic Converters. SAE Powertrain Fluid Syst. Conf. Exhib. 2003, 14. [Google Scholar] [CrossRef]
- Tsinoglou, D.N.; Koltsakis, G.C. Transient modelling of flow distribution in automotive catalytic converters. Appl. Math. Model. 2004, 28, 775–794. [Google Scholar] [CrossRef]
- Konstandopoulos, A.G. Inertial Contributions to the Pressure Drop of Diesel Particulate Filters Reprinted from: Diesel Exhaust Emission Control: Diesel Particulate Filters. 2001-01-0909. SAE Tech. Paper 2001. [Google Scholar] [CrossRef]
- Liu, Z.G.; Miller, R.K.; Nelson, F.; Company, A.C. Flow Distributions and Pressure Drops of Wall-Flow Diesel Particulate Filters 2002-01-1311. SAE Tech. Paper 2002. [Google Scholar] [CrossRef]
- Cooper, J.D.; Liu, L.; Ramskill, N.P.; Watling, T.C.; York, A.P.E.; Stitt, E.H.; Sederman, A.J.; Gladden, L.F. Numerical and experimental studies of gas flow in a particulate filter. Chem. Eng. Sci. 2019, 209, 115179. [Google Scholar] [CrossRef]
- Mirdrikvand, M.; Sadeghi, M.; Karim, M.N.; Thöming, J.; Dreher, W. Pore-scale analysis of axial and radial dispersion coeffi cients of gas fl ow in macroporous foam monoliths using NMR-based displacement measurements. Chem. Eng. J. 2020, 388, 124234. [Google Scholar] [CrossRef]
- Dumoulin, C.L.; Souza, S.P.; Darrow, R.D.; Pelc, N.J.; Adams, W.J.; Ash, S.A. Simultaneous acquisition of phase-contrast angiograms and stationary-tissue images with Hadamard encoding of flow-induced phase shifts. J. Magn. Reson. Imaging 1991, 1, 399–404. [Google Scholar] [CrossRef] [PubMed]
- Pelc, N.J.; Bernstein, M.A.; Shimakawa, A.; Glover, G.H. Encoding strategies for three-direction phase-contrast MR imaging of flow. J. Magn. Reson. Imaging 1991, 1, 405–413. [Google Scholar] [CrossRef]
- Versteeg, H.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method; Pearson Education: London, UK, 2007. [Google Scholar]
- Report, T.; Pozzobon, V.; Centrale, E.; Lagragian, M.; View, O.T.; Pozzobon, V. OpenFOAM Advanced Tutorial. 2016. Available online: https://cfd.direct/openfoam/user-guide-v4/ (accessed on 14 February 2019).
- Della Torre, A.; Montenegro, G.; Tabor, G.R.; Wears, M.L. CFD characterization of flow regimes inside open-cell foam substrates. Int. J. Heat Fluid Flow 2014, 50, 72–82. [Google Scholar] [CrossRef] [Green Version]
- Masoudi, M. Hydrodynamics of diesel particulate filters. SAE Tech. Pap. 2002. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flow Rate (SL·min−1) | ||
|---|---|---|
| 0 | 11.2 | 1.62 |
| 0.5 | 6.79 | 2.14 |
| 1.0 | 6.78 | 2.12 |
| 1.5 | 6.82 | 2.23 |
| 2.0 | 6.70 | 2.37 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mirdrikvand, M.; Sadeghi, M.; Pesch, G.R.; Dreher, W.; Thöming, J. Full-Field Comparison of MRV and CFD of Gas Flow through Regular Catalytic Monolithic Structures. Processes 2021, 9, 566. https://doi.org/10.3390/pr9030566
Mirdrikvand M, Sadeghi M, Pesch GR, Dreher W, Thöming J. Full-Field Comparison of MRV and CFD of Gas Flow through Regular Catalytic Monolithic Structures. Processes. 2021; 9(3):566. https://doi.org/10.3390/pr9030566
Chicago/Turabian StyleMirdrikvand, Mojtaba, Mehrdad Sadeghi, Georg R. Pesch, Wolfgang Dreher, and Jorg Thöming. 2021. "Full-Field Comparison of MRV and CFD of Gas Flow through Regular Catalytic Monolithic Structures" Processes 9, no. 3: 566. https://doi.org/10.3390/pr9030566