
Study on a Second-Order Adaptive Sliding-Mode Observer Control Algorithm for the Sensorless Permanent Magnet Synchronous Motor
Abstract
:1. Introduction
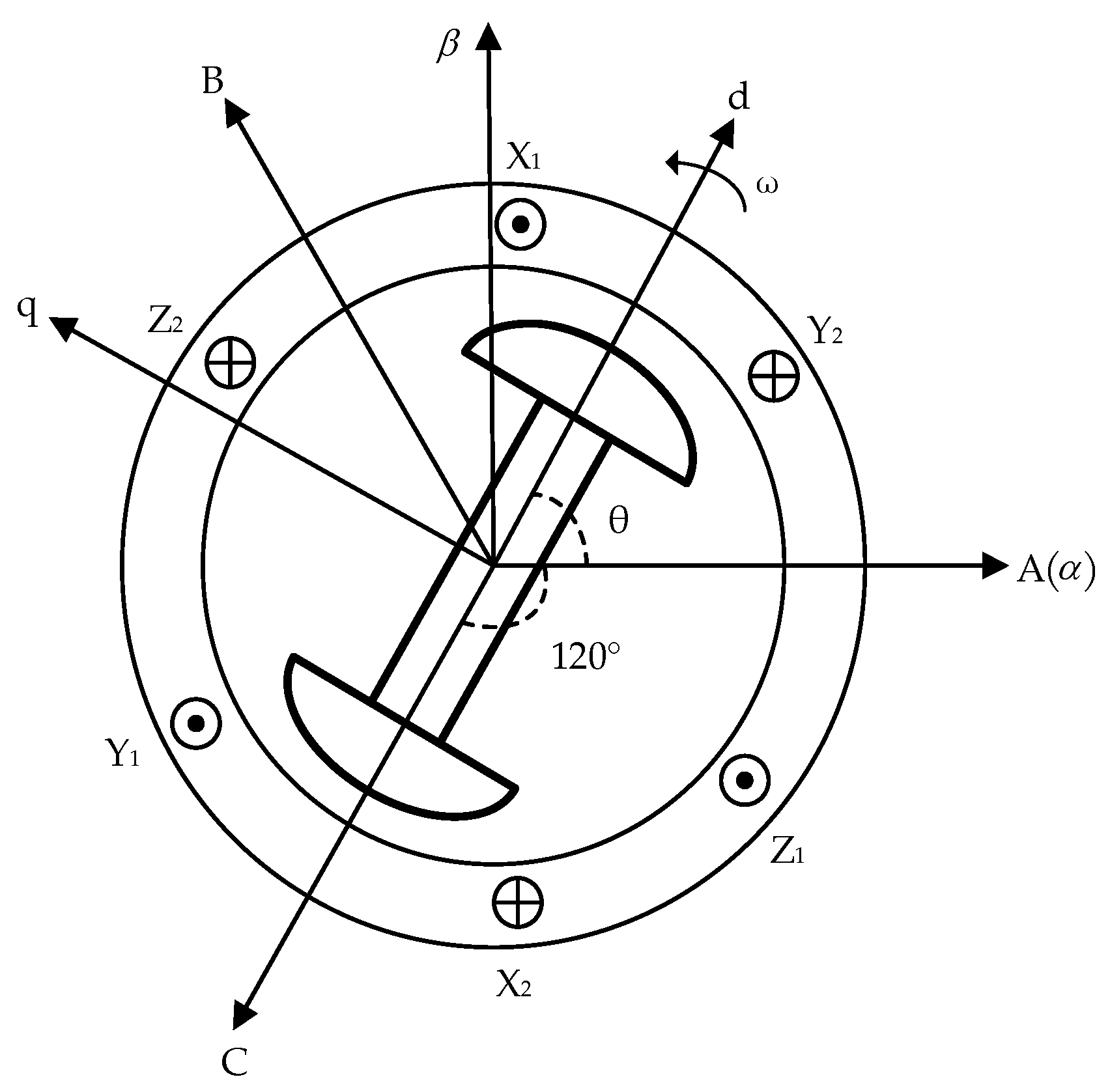
2. Physical and Mathematical Model of a PMSM
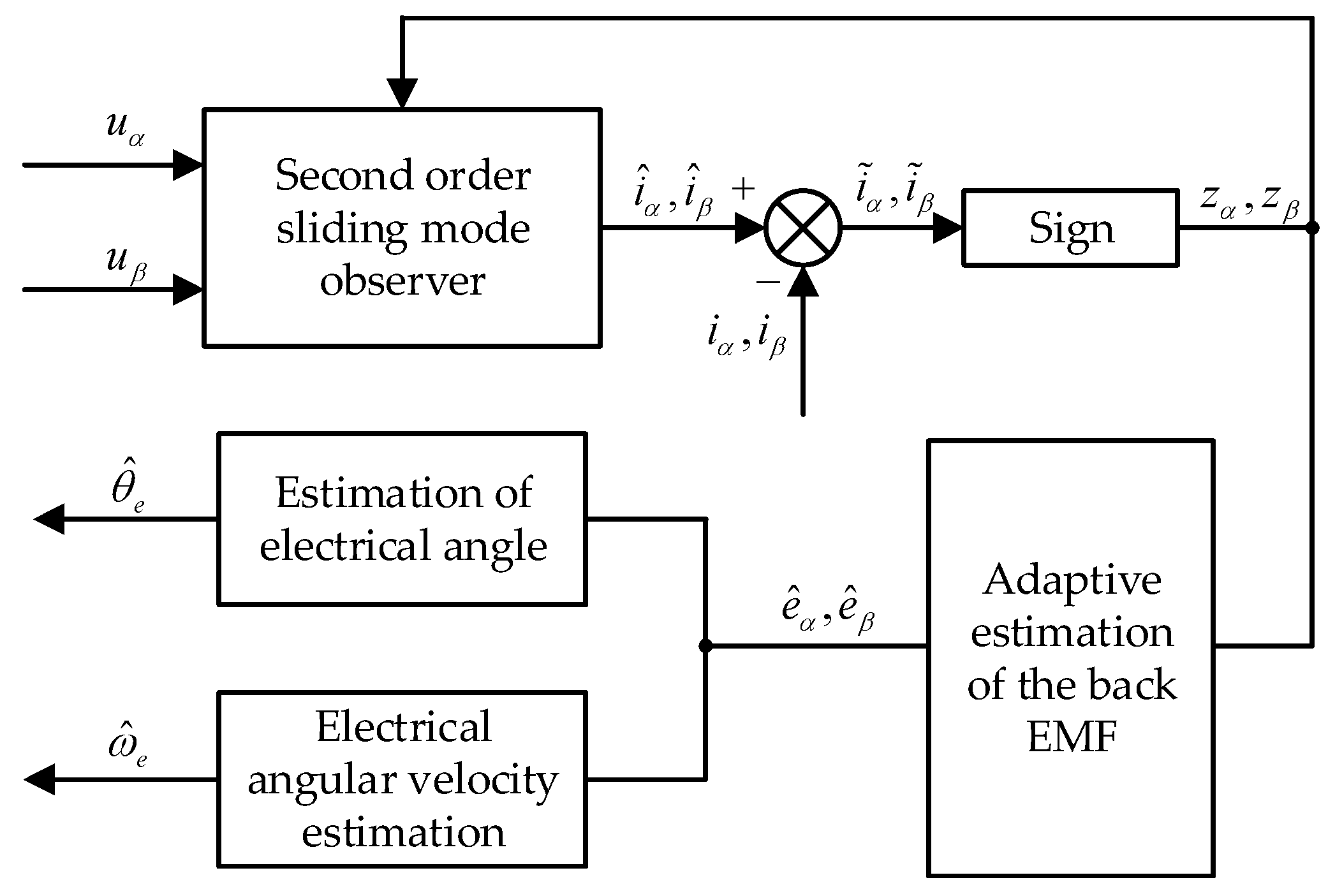
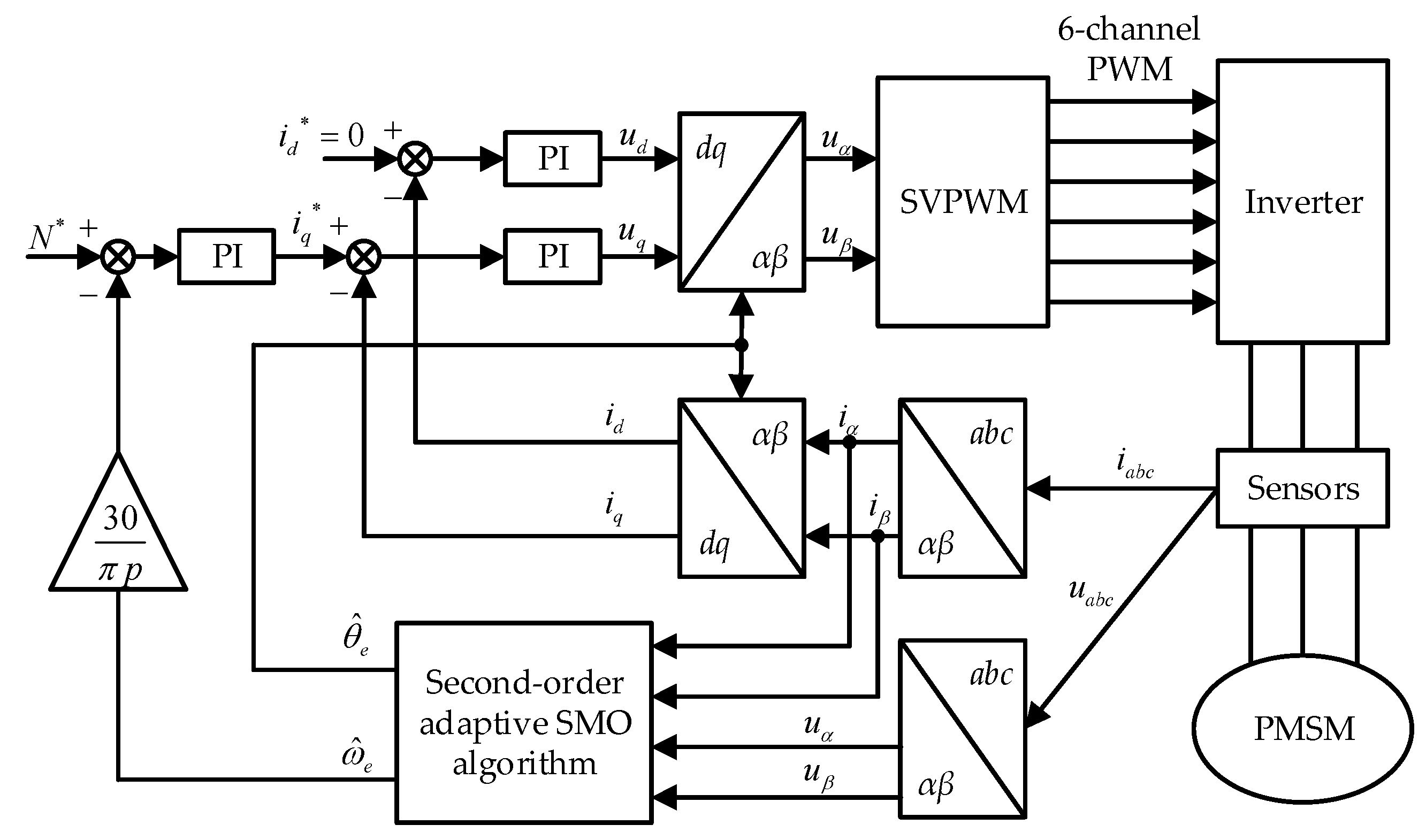
3. Second-Order Adaptive Sliding-Mode Observer Algorithm
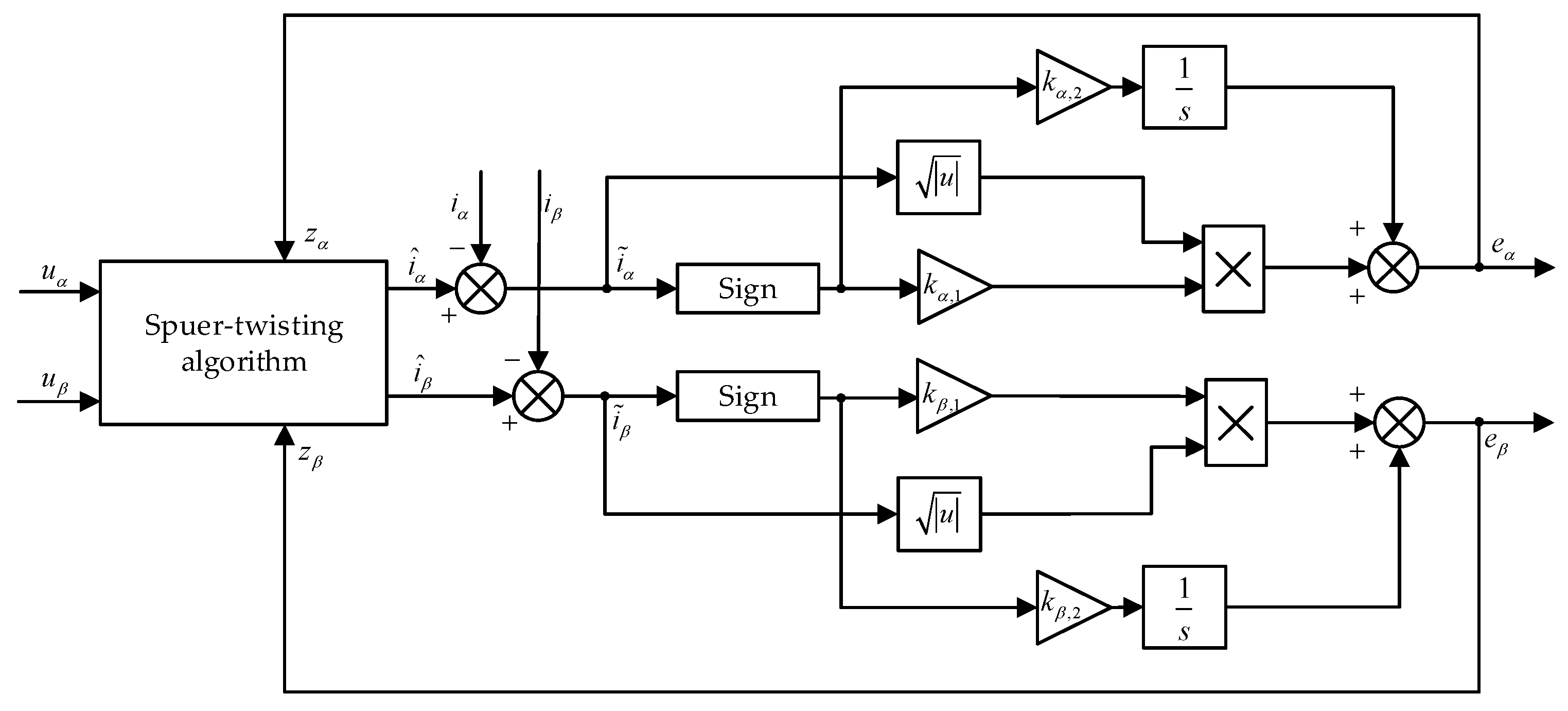
3.1. Design of Second-Order SMO
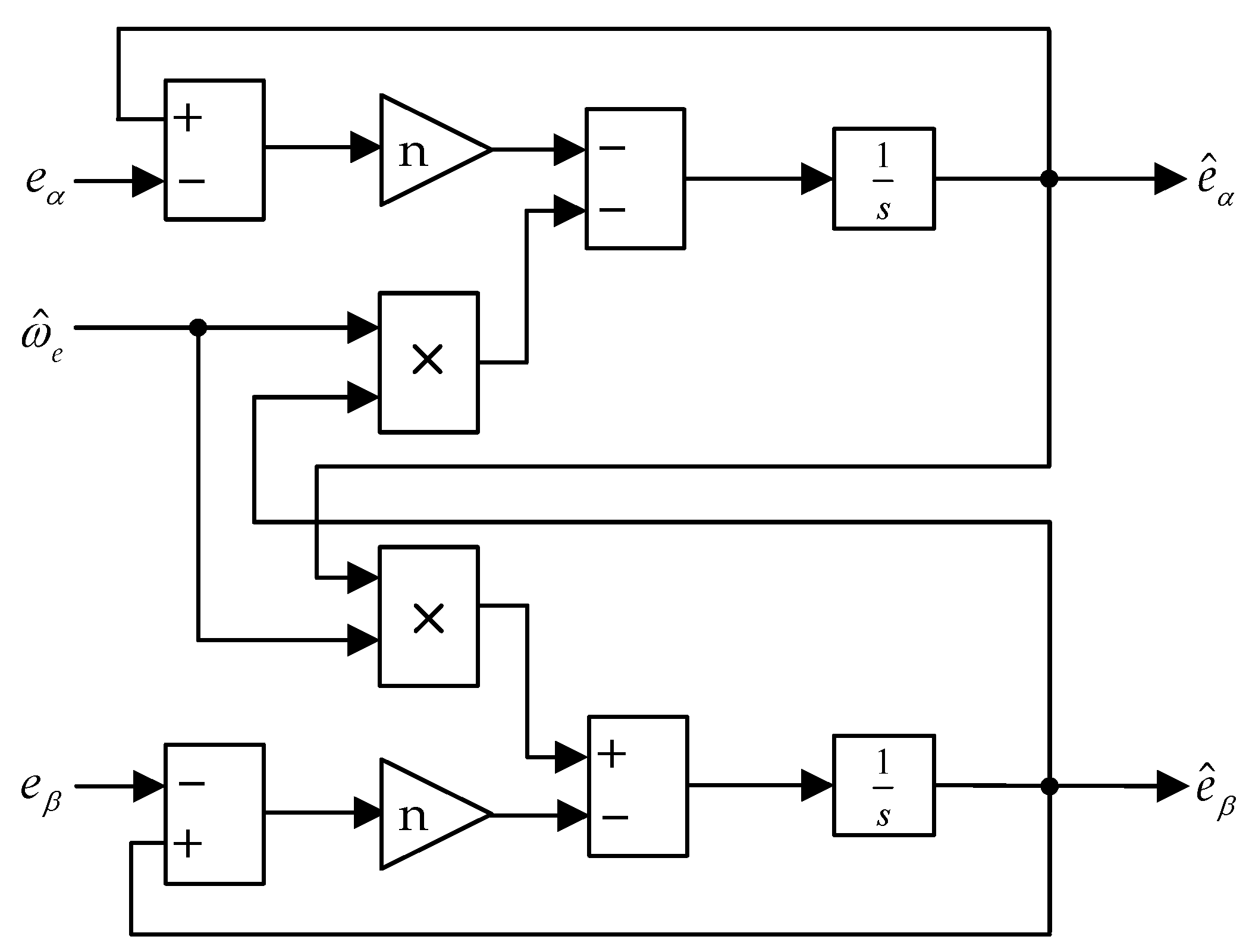
3.2. Adaptive Estimation of the Back-EMF
3.3. Calculation of Rotor Velocity and Position
4. Experiment Verification and Results Analysis
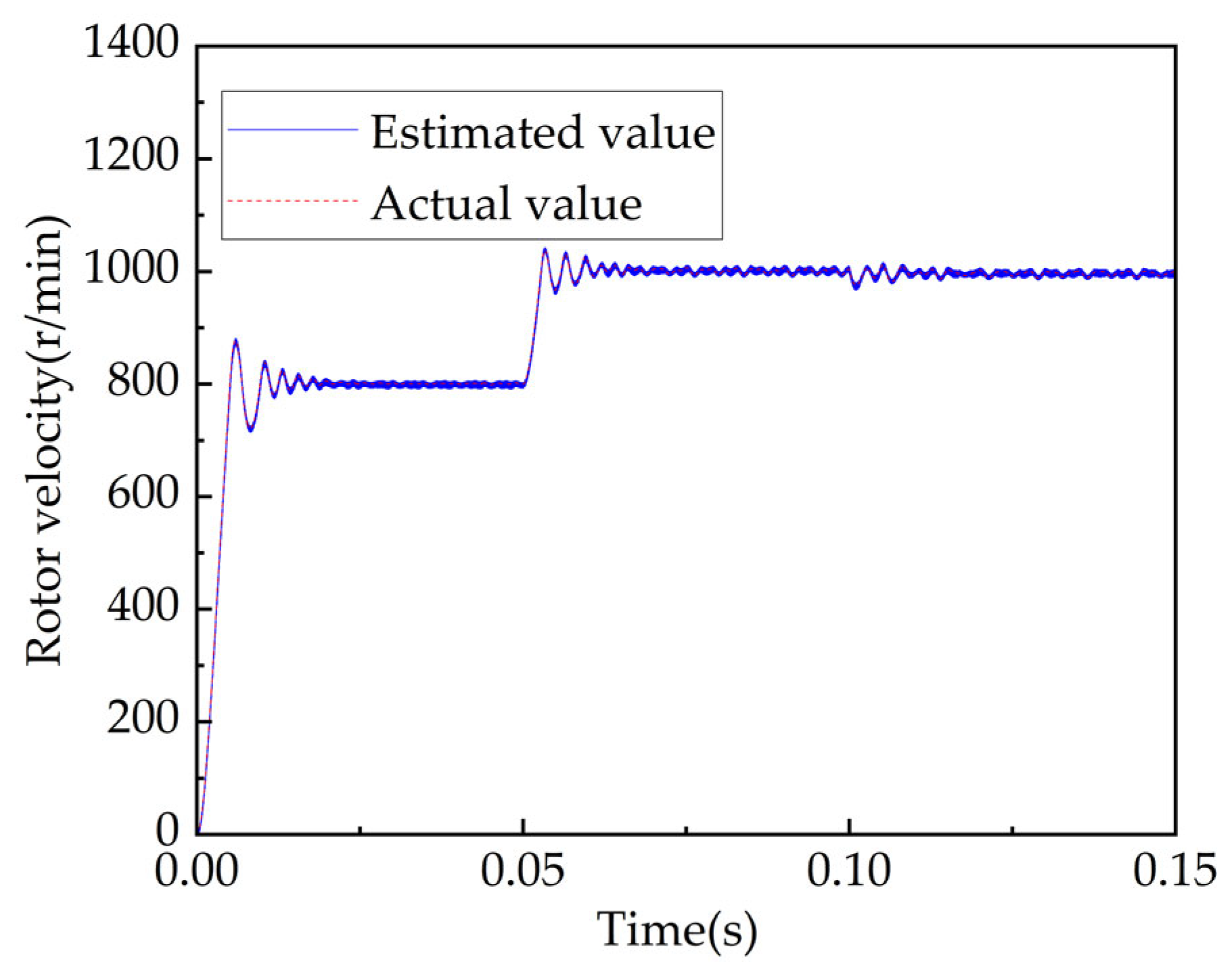
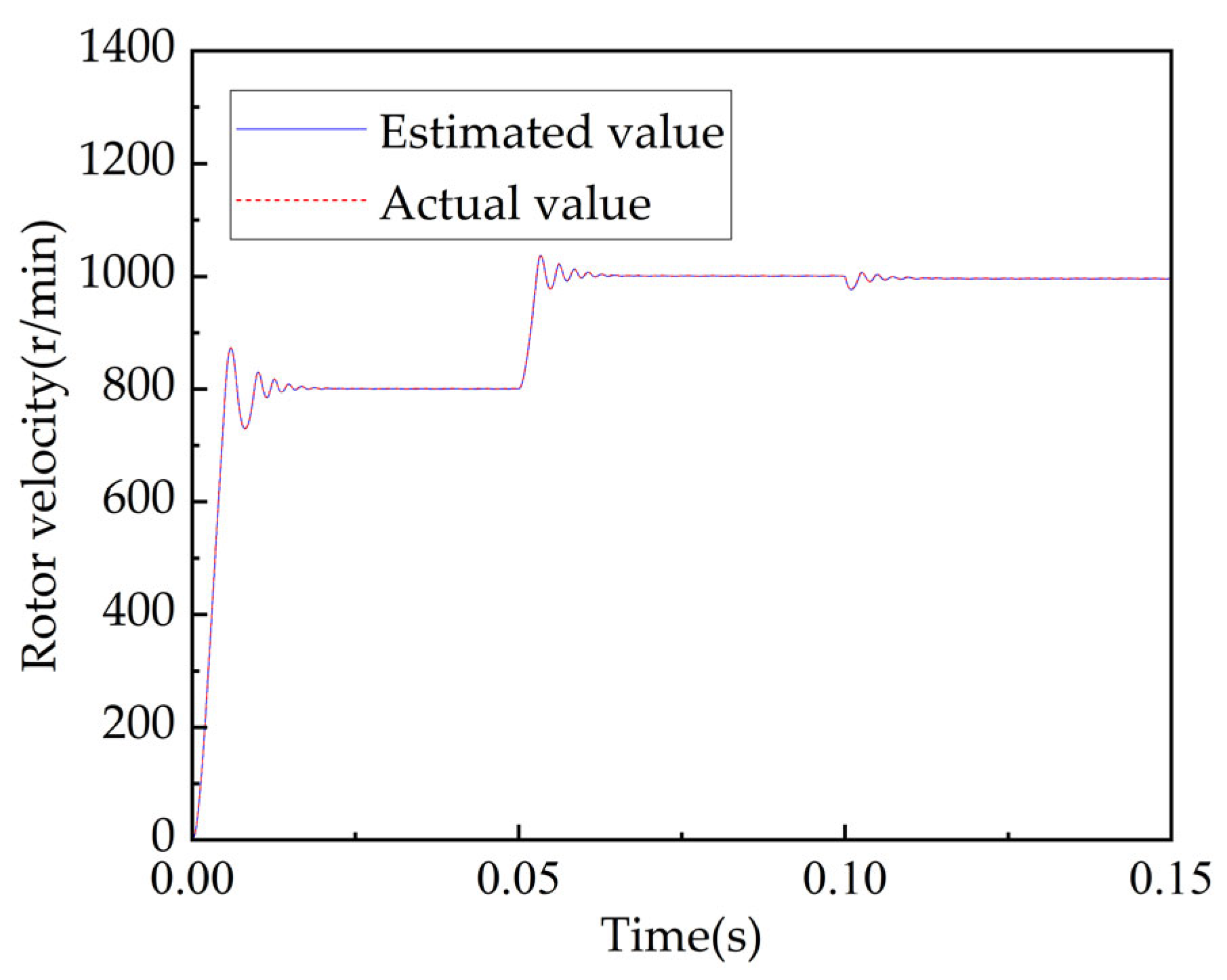
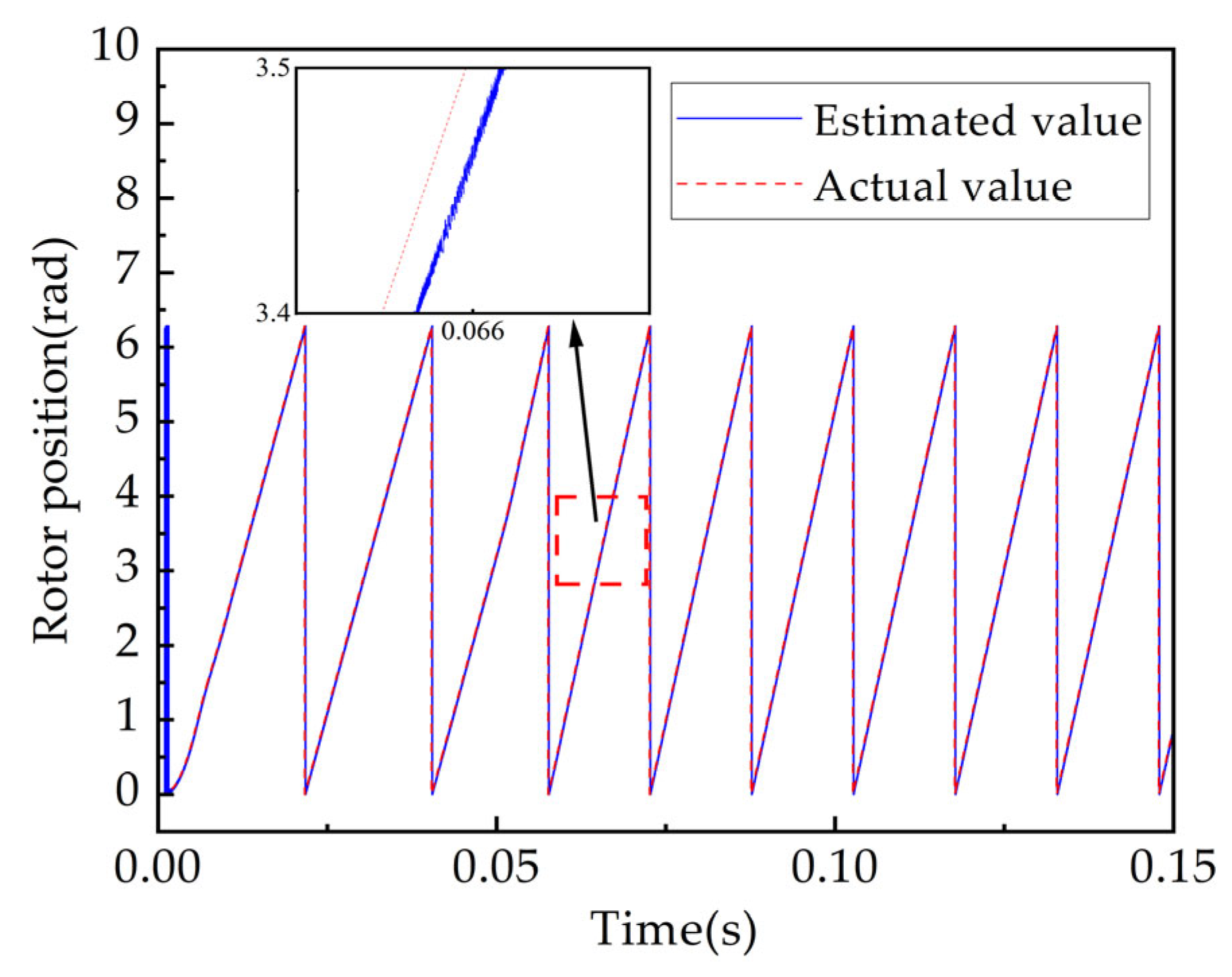
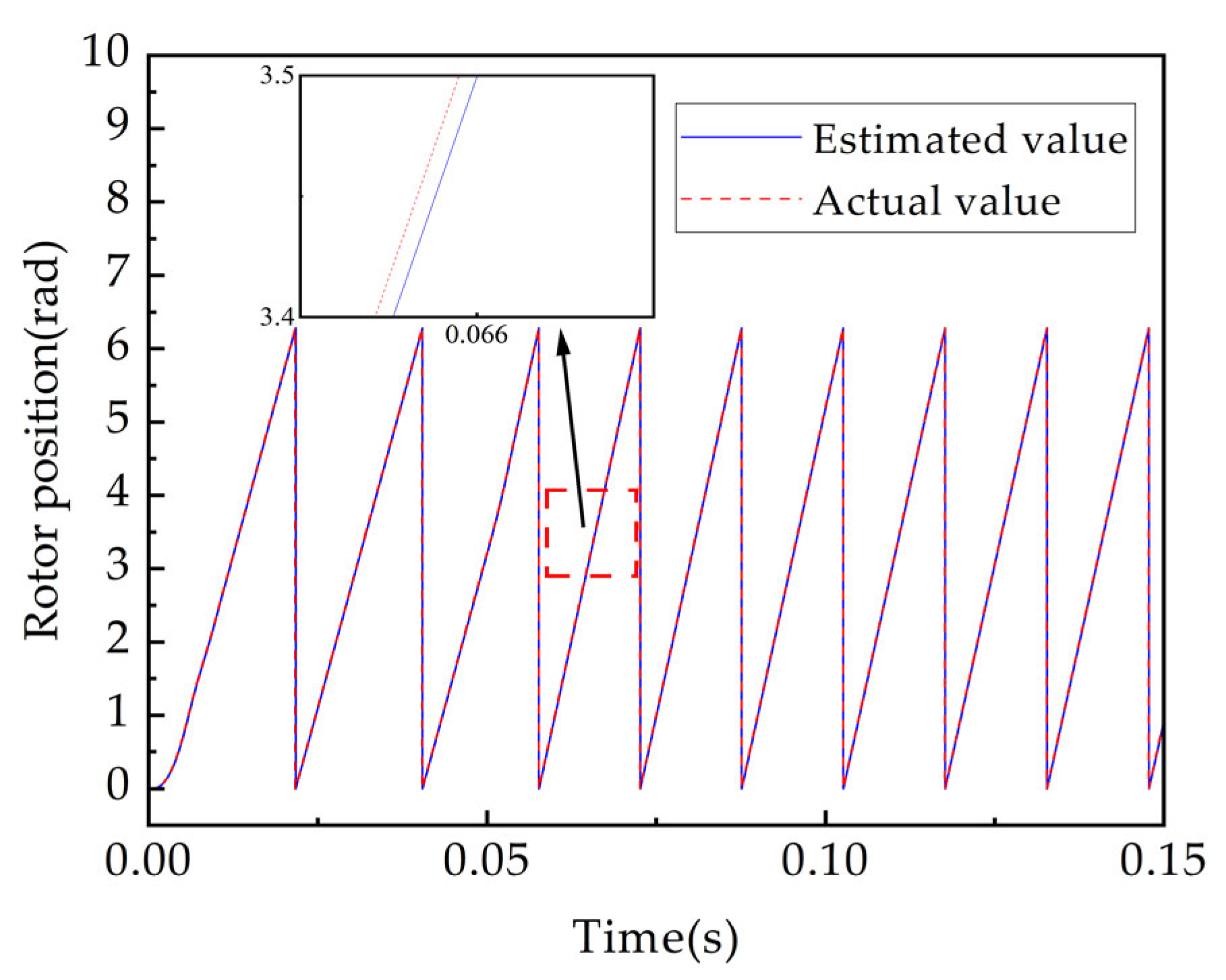
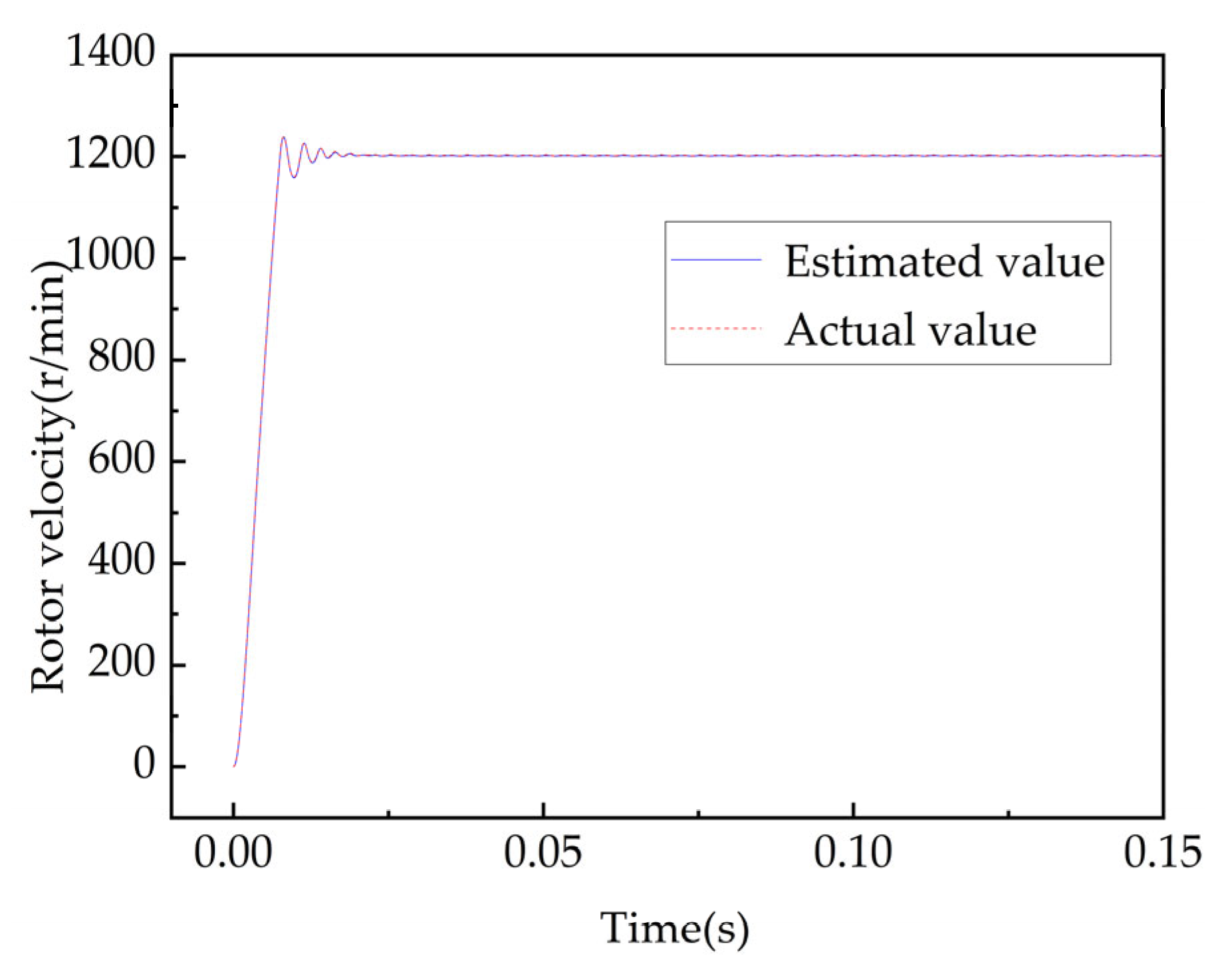
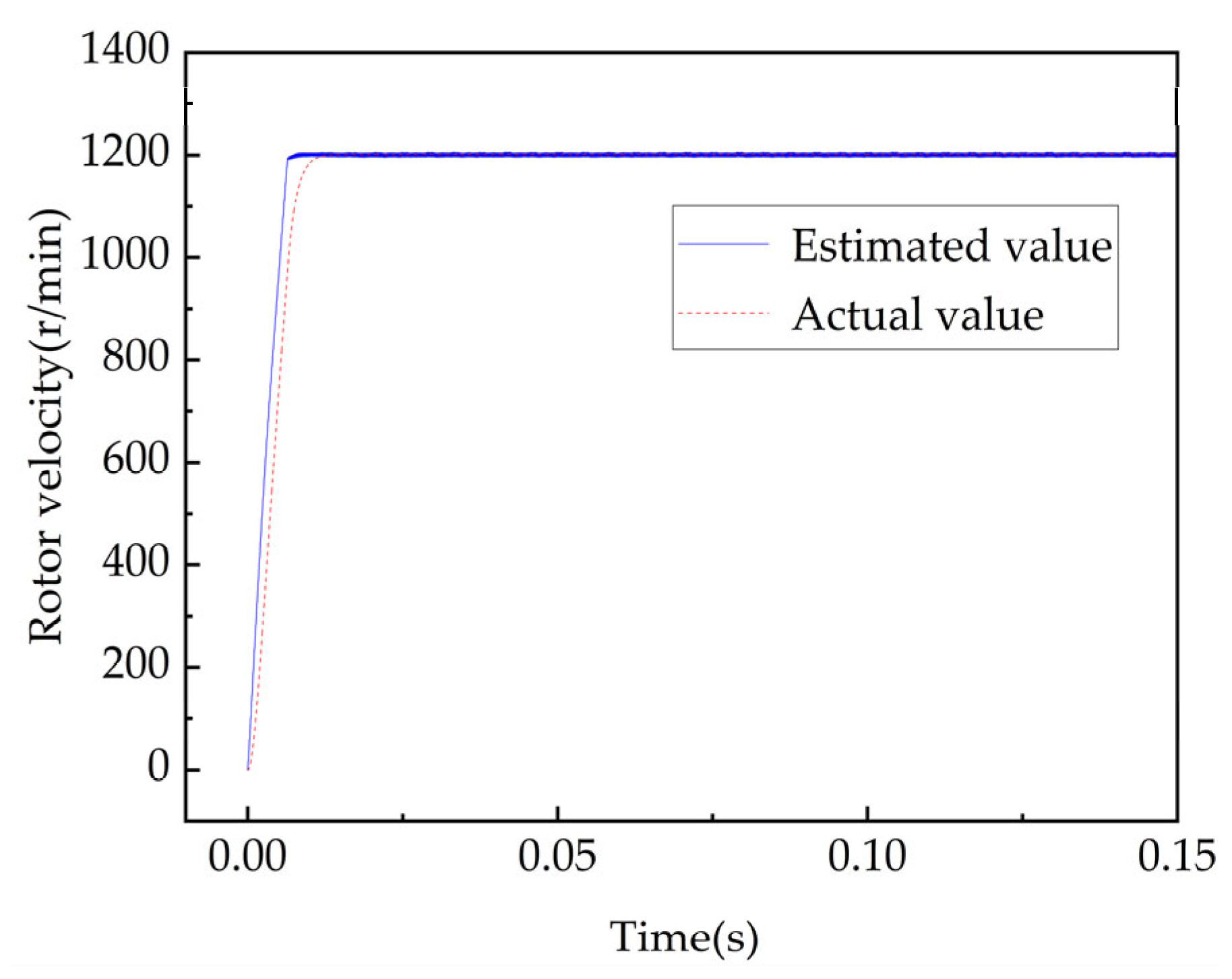
4.1. Analysis of Rotor Velocity and Rotor Position
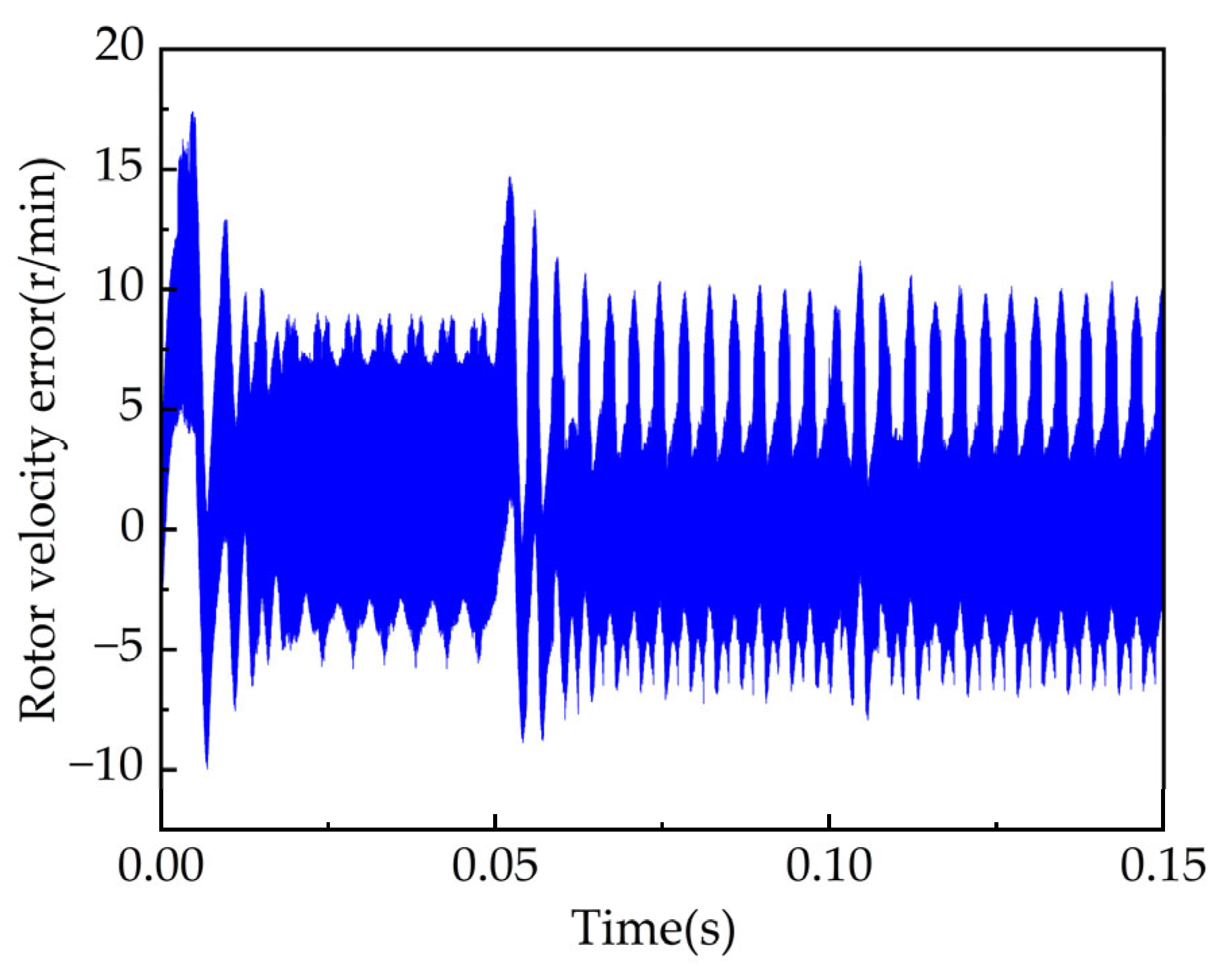
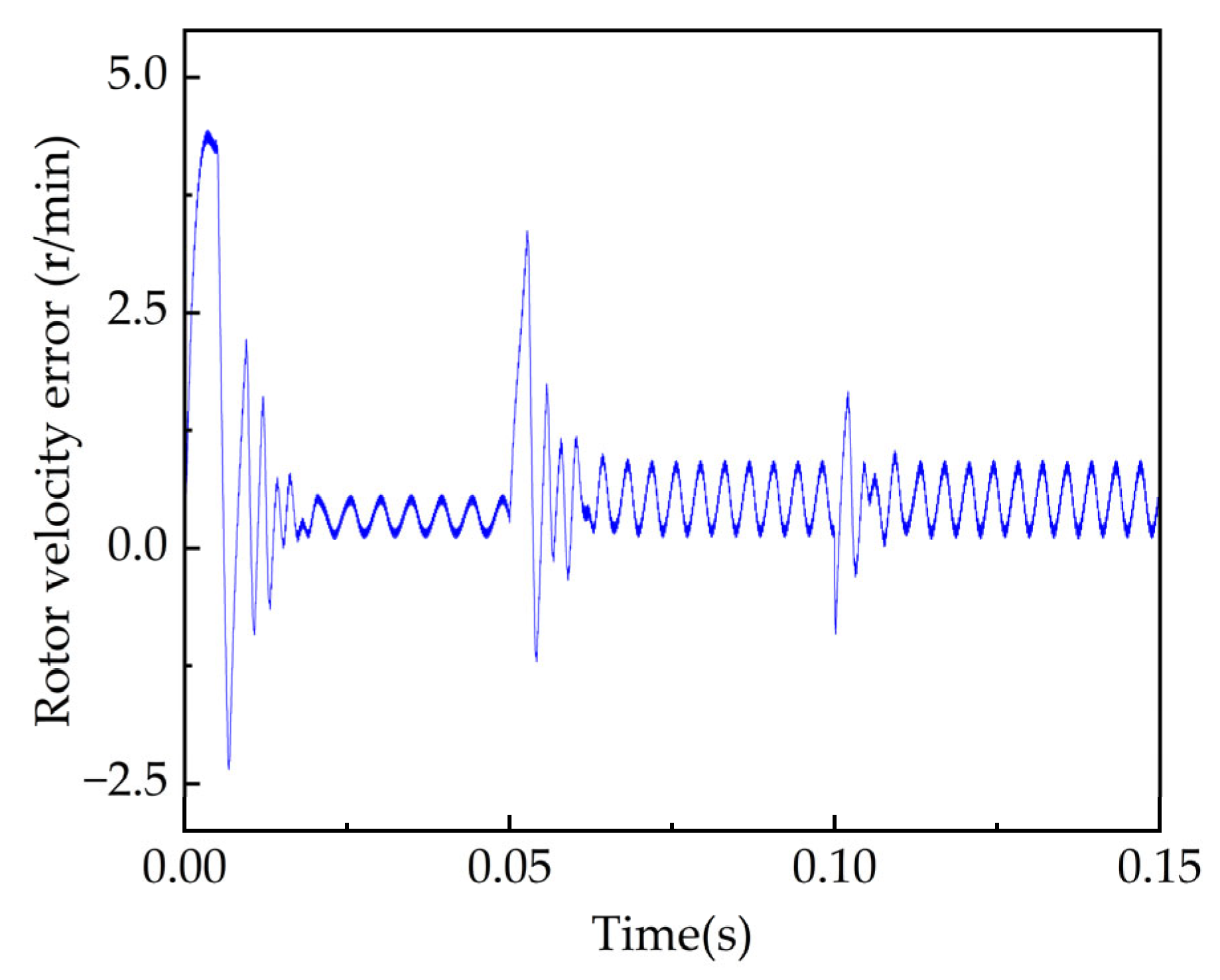
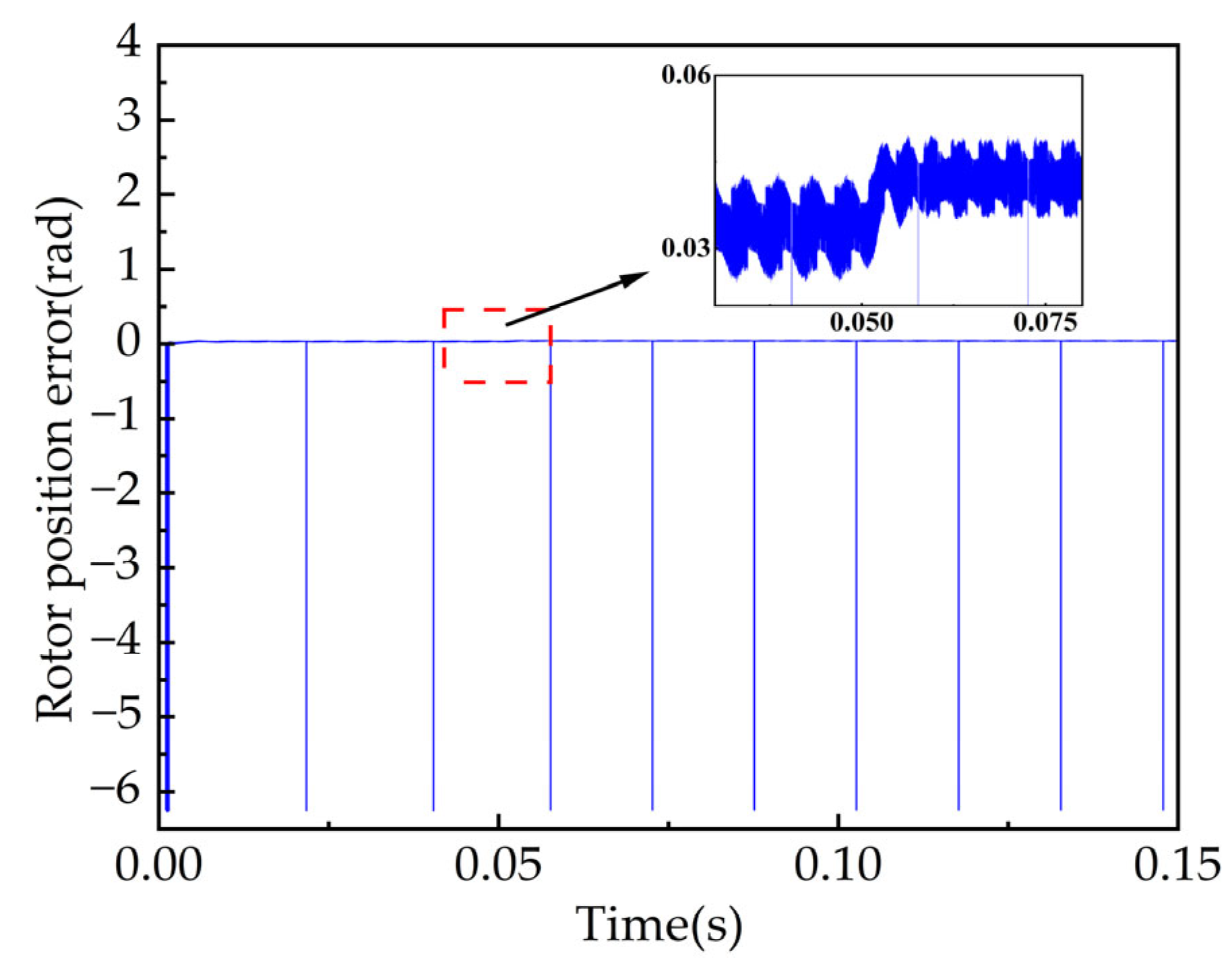
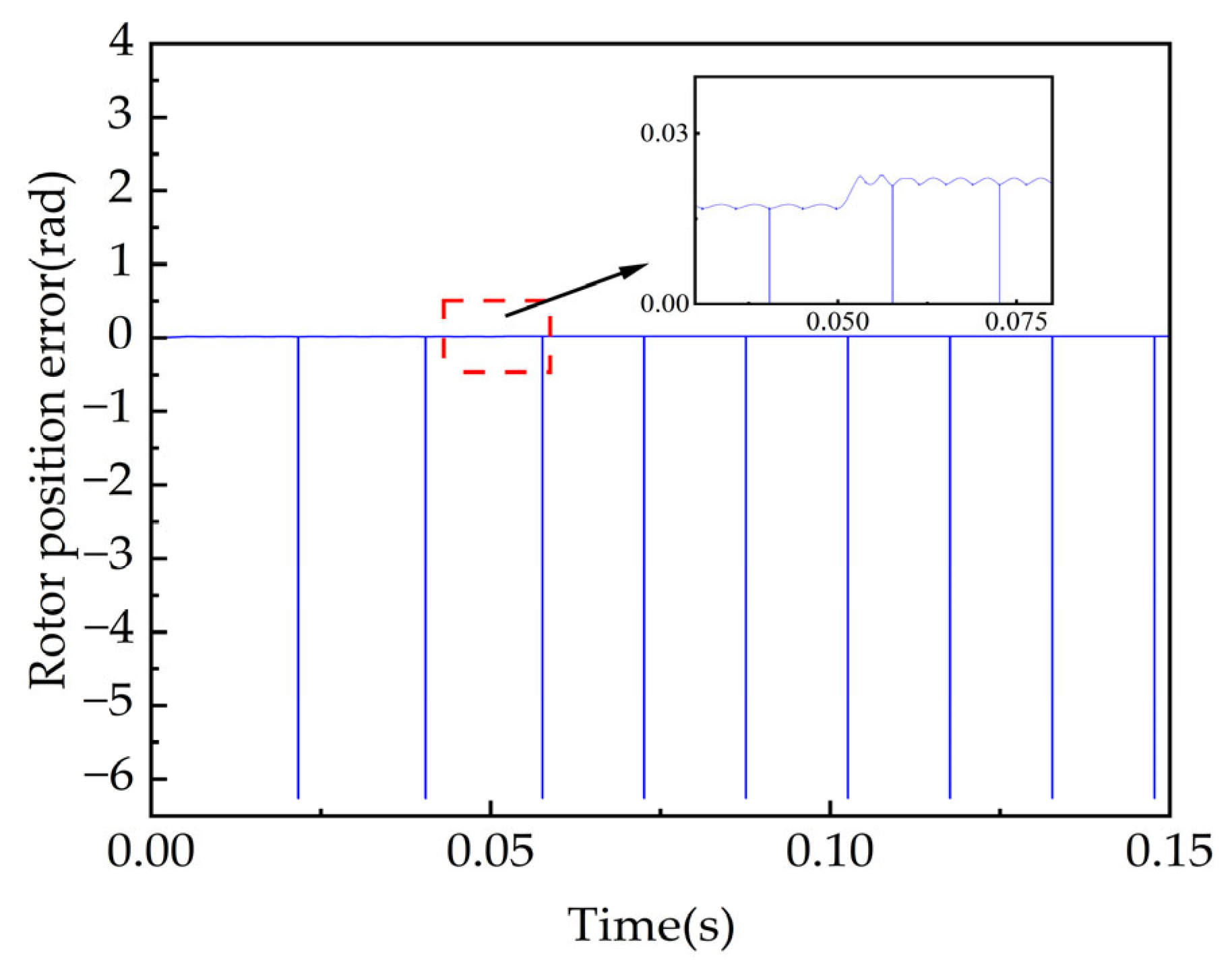
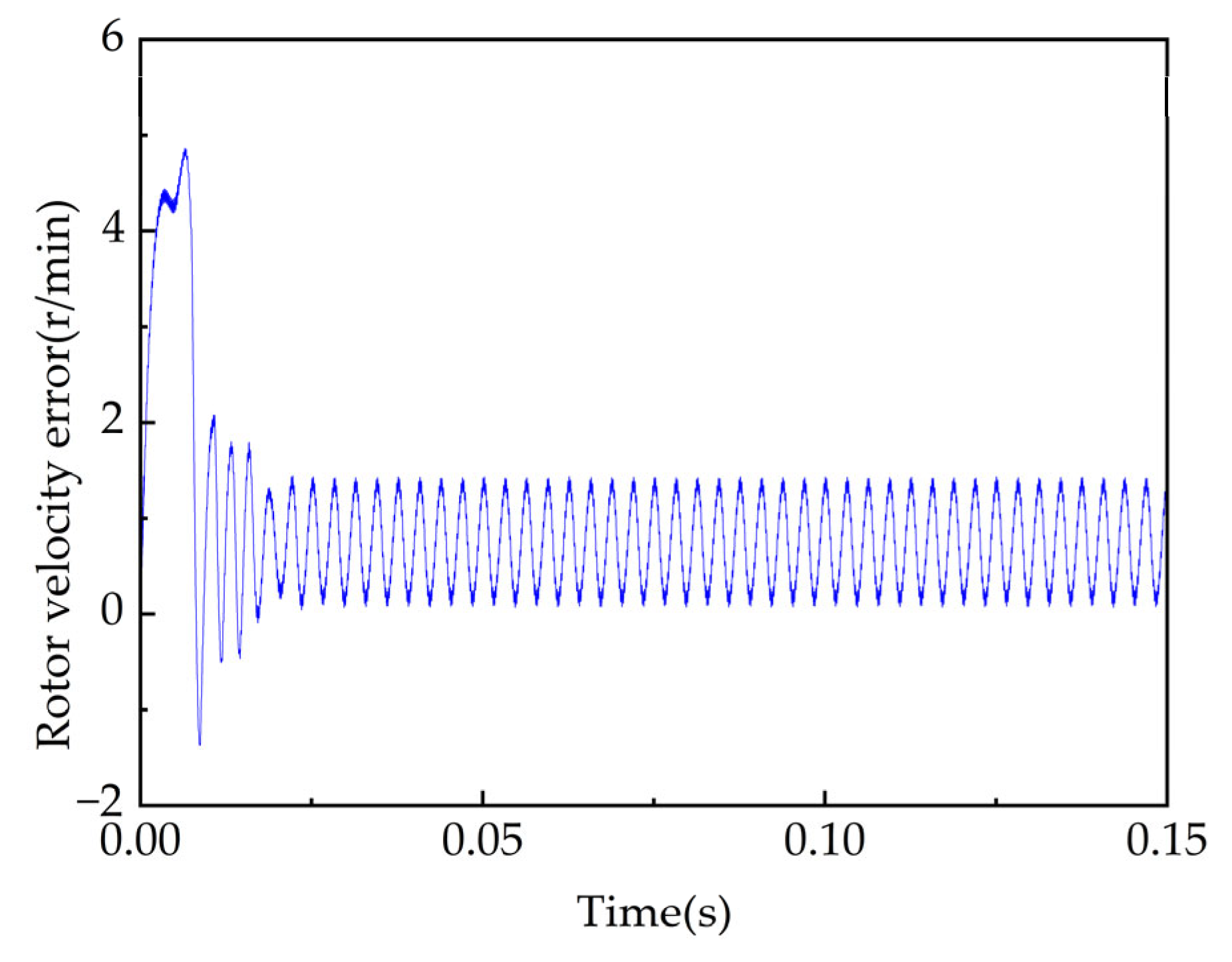
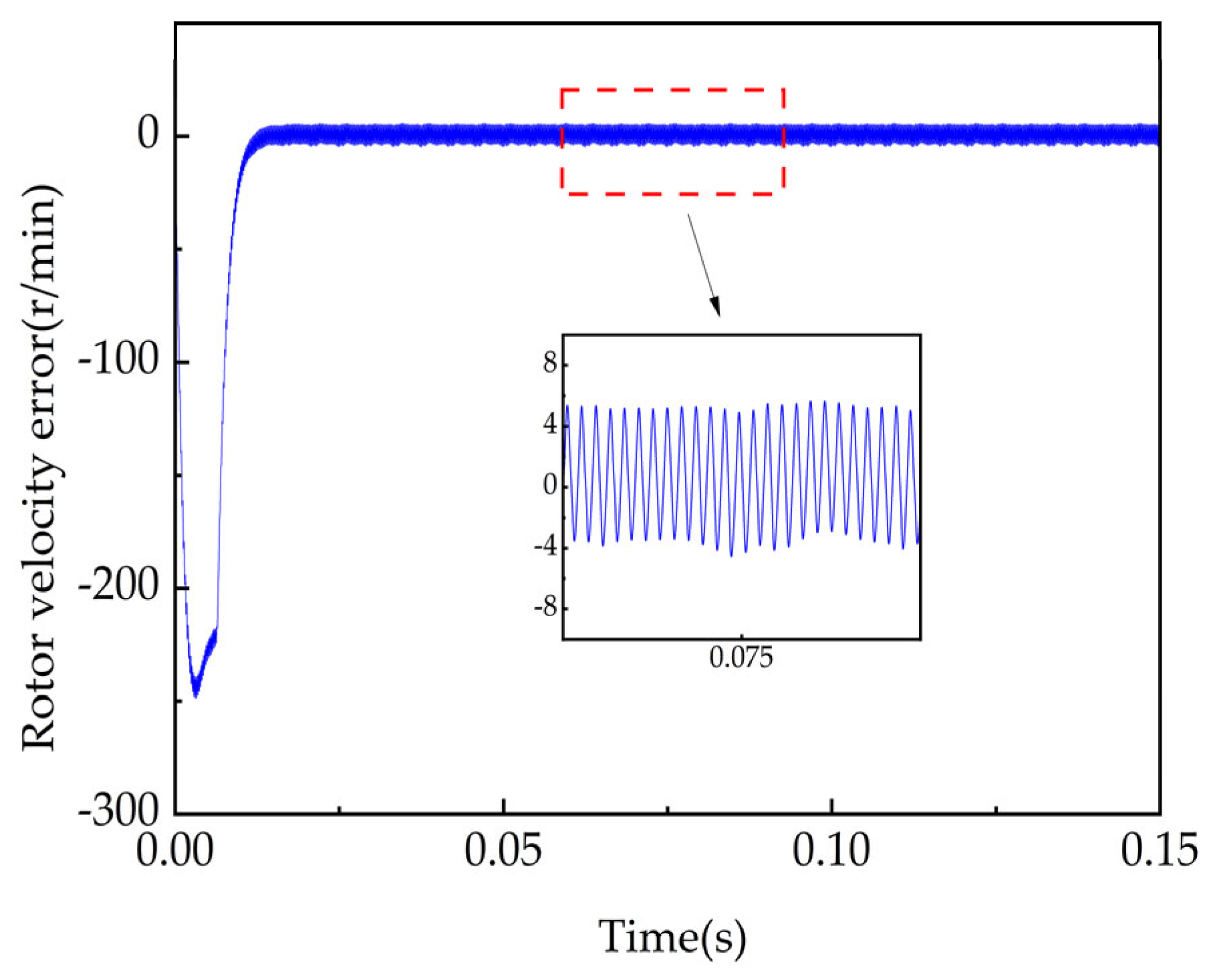
4.2. Analysis of Rotor Velocity Error and Rotor Position Error
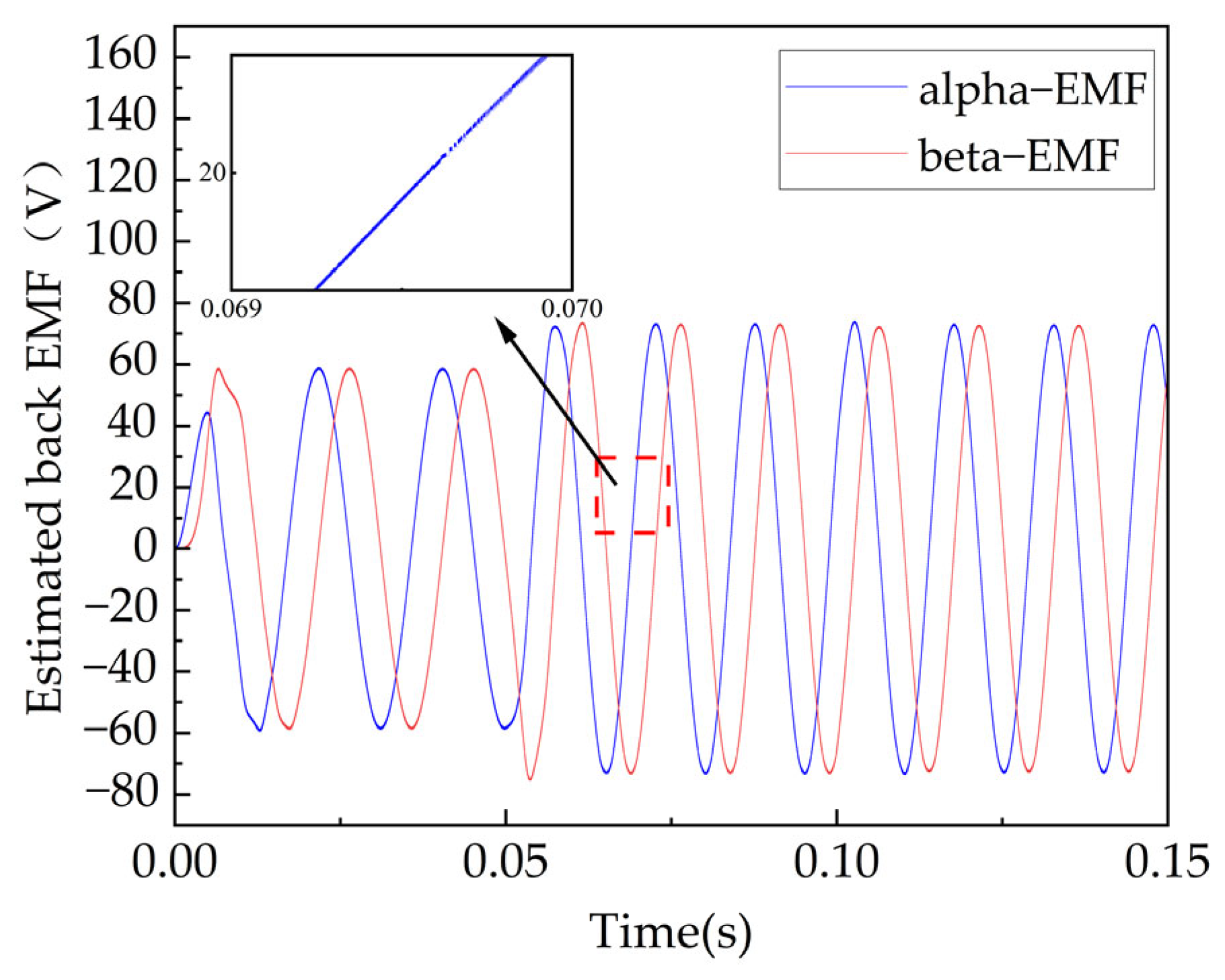
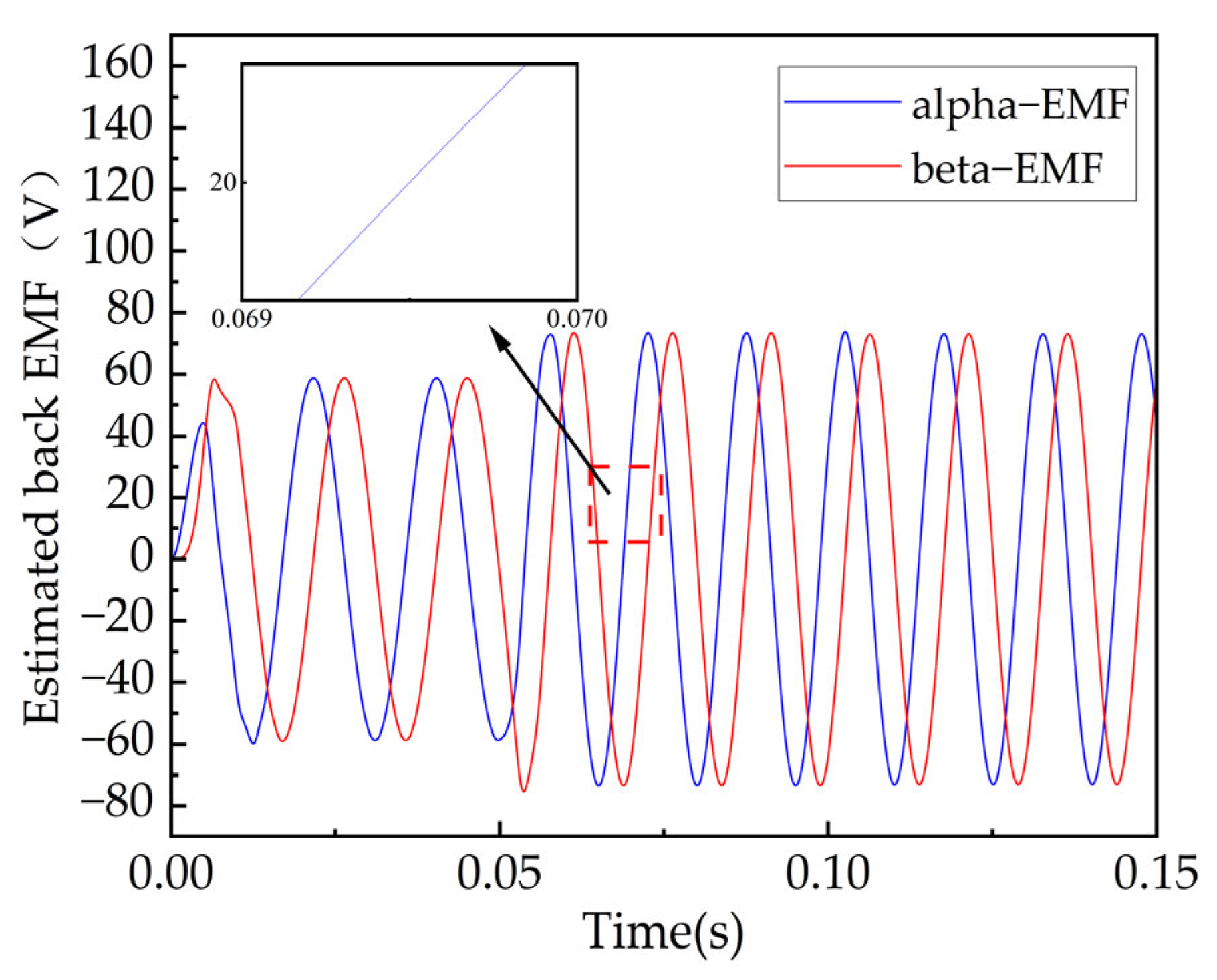
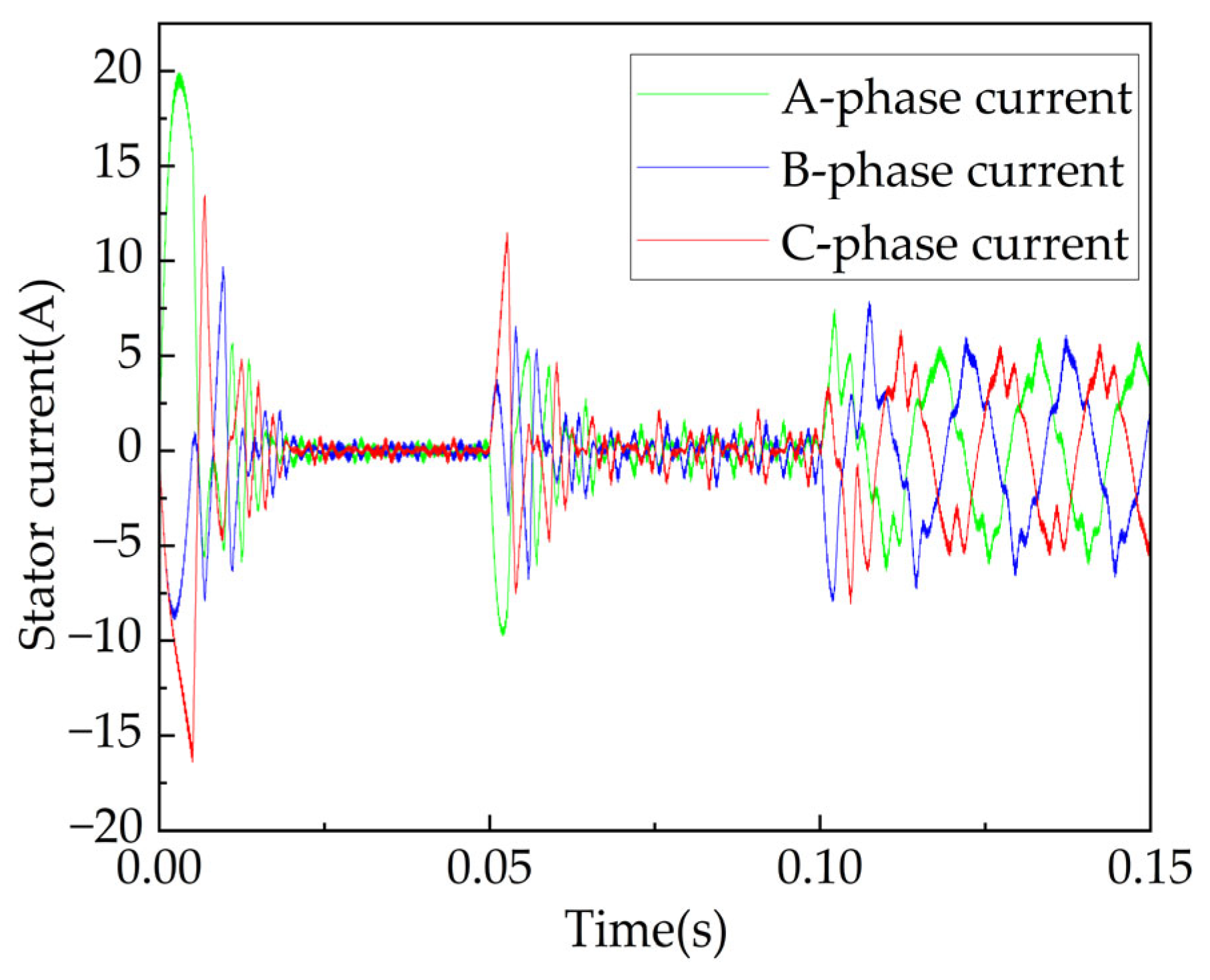
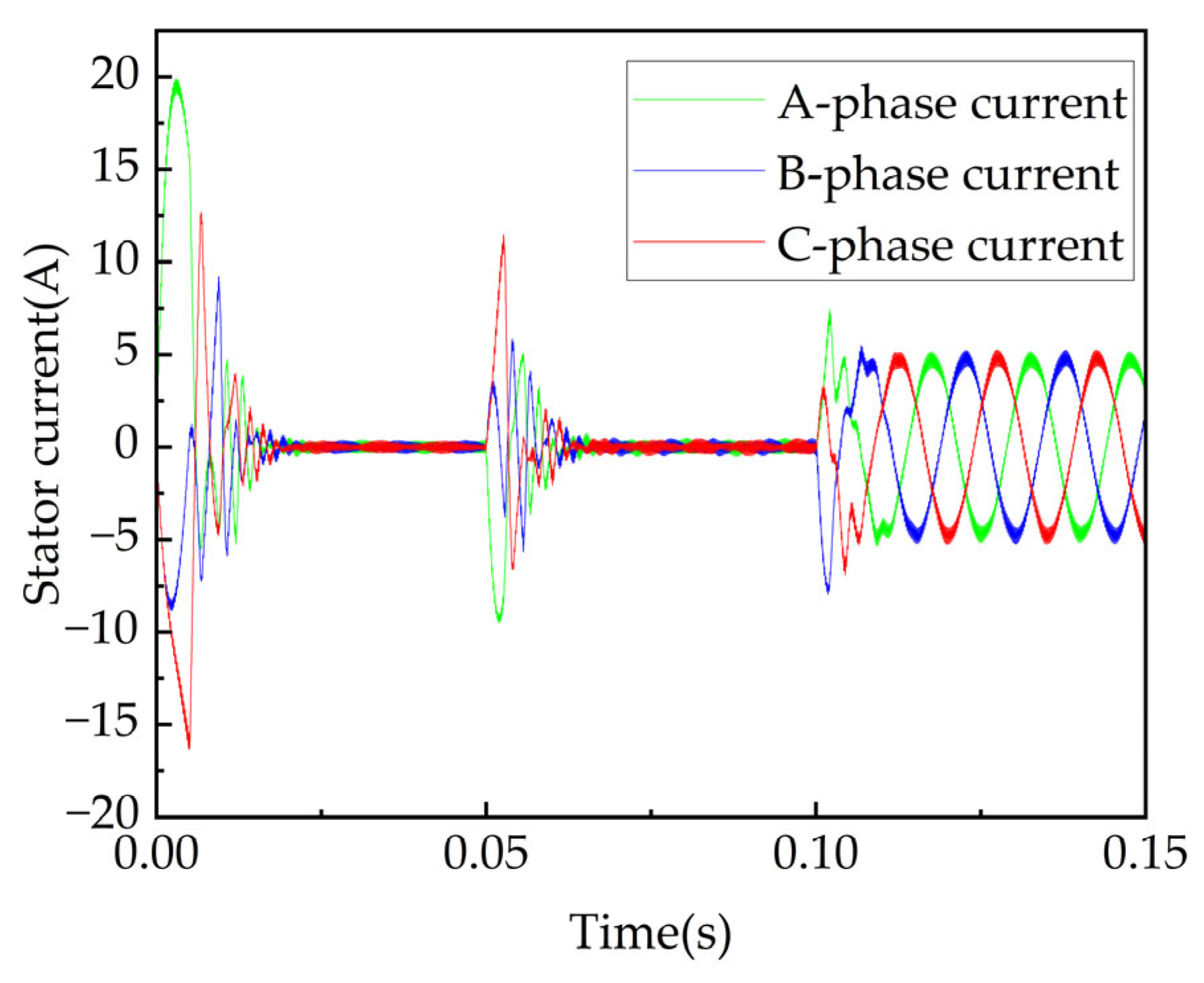
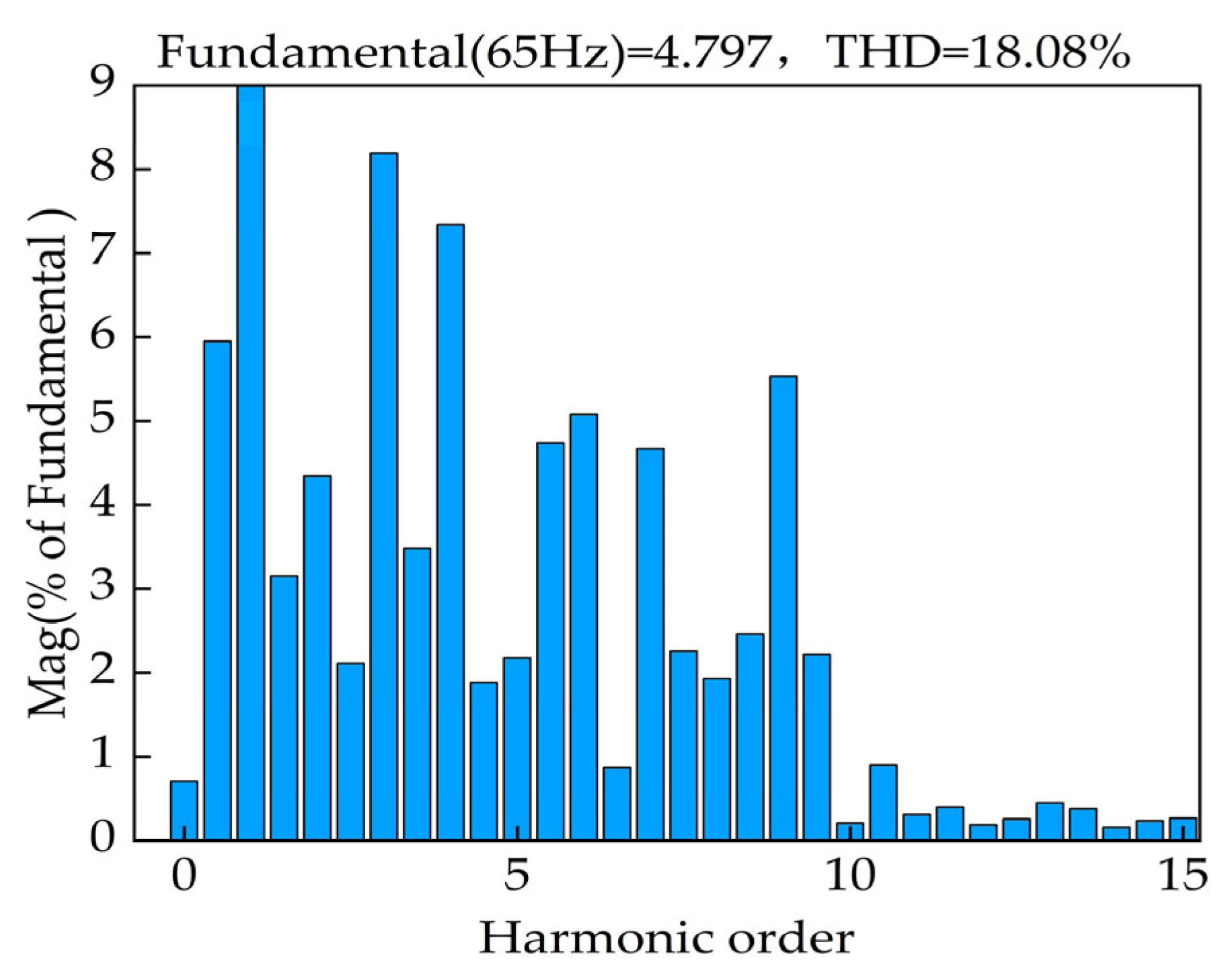
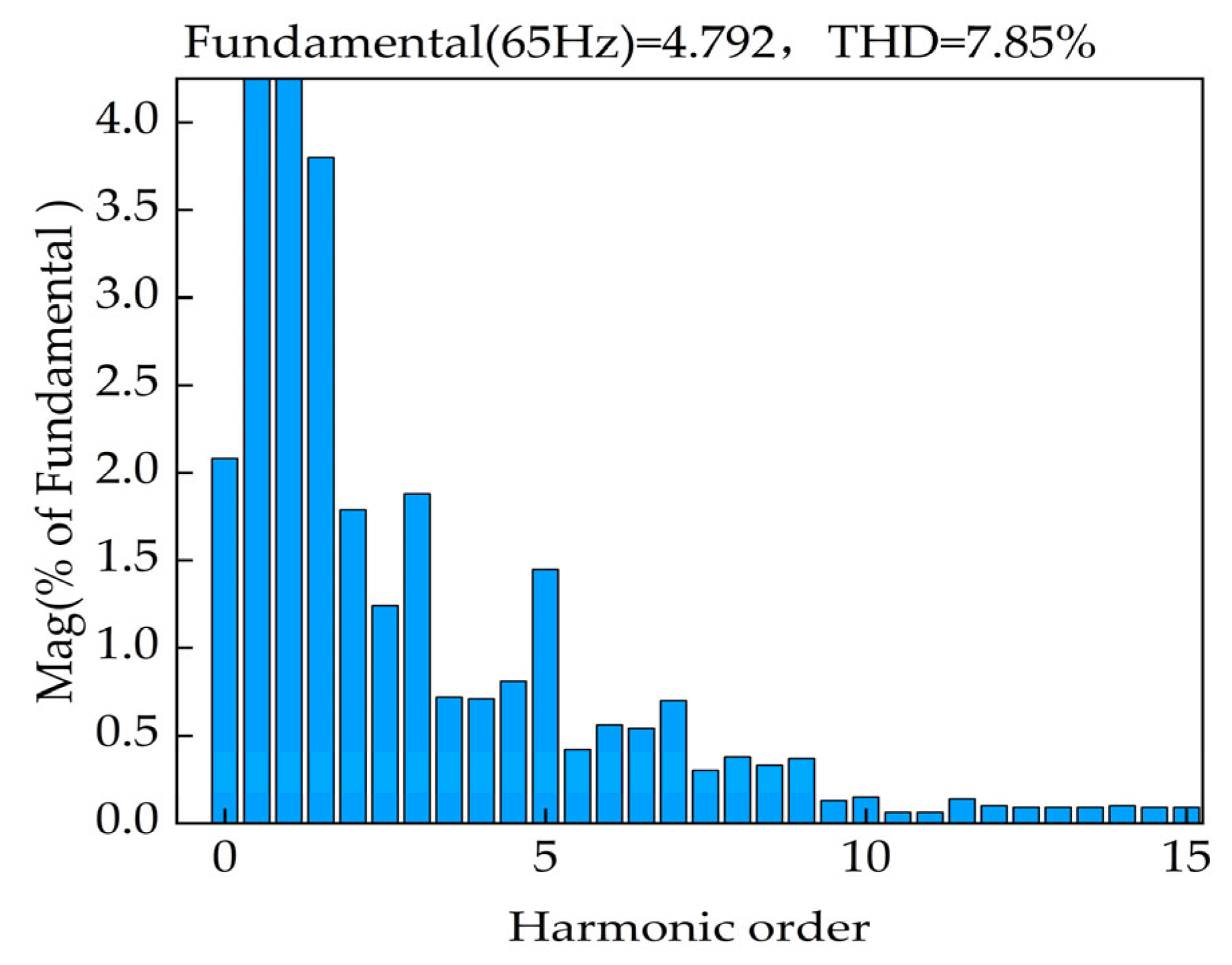
4.3. Analysis of the Estimated Back-EMF and the Three-Phase Current
4.4. Stability Analysis under Mismatch of Stator Resistance
4.5. Comparison of Results of Different Control Methods
5. Conclusions
- (1)
- This algorithm effectively weakens the jitter of the traditional SMO algorithm, reduces the velocity error and position error, and improves the velocity and position tracking performance of the system.
- (2)
- The estimated back-EMF noise is smaller, and there are fewer high-order harmonics of the current after adding load, making this algorithm more resistant to sudden load changes and giving it high robustness.
- (3)
- Compared with other PMSM position-sensorless control algorithms, the estimation accuracy of rotor velocity and position of the algorithm proposed in this paper is higher.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, Z.; Mahmoudi, A.; Kahourzade, S.; Soong, W.L. An Overview of Electric Motors for Electric Vehicles. In Proceedings of the 2021 31st Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 26–30 September 2021; pp. 1–6. [Google Scholar]
- Huang, S.; Ching, T.W.; Li, W.; Deng, B. Overview of Linear Motors for Transportation Applications. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, Australia, 12–15 June 2018; pp. 150–154. [Google Scholar]
- Manoharan, S.; Palpandian, P.; Mahalakshmi, B.; Govindarai, V. A Review of Indian Scenario on Energy Conservation in Ceiling Fans Powered by BLDC Motors. In Proceedings of the 2021 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 27–29 November 2021; pp. 1–7. [Google Scholar]
- Sakunthala, S.; Kiranmayi, R.; Mandadi, P.N. A study on industrial motor drives: Comparison and applications of PMSM and BLDC motor drives. In Proceedings of the 2017 International Conference on Energy, Communication, Data Analytics and Soft Computing (ICECDS), Chennai, India, 1–2 August 2017; pp. 537–540. [Google Scholar]
- Varshney, A.; Sharma, U.; Singh, B. A Grid Interactive Sensorless Synchronous Reluctance Motor Drive for Solar Powered Water Pump for Agriculture and Residential Applications. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Y.; Bianchi, N.; Bolognani, S.; Alberti, L. Synchronous motors for traction applications. In Proceedings of the 2017 International Conference of Electrical and Electronic Technologies for Automotive, Turin, Italy, 15–16 June 2017; pp. 1–8. [Google Scholar]
- Wang, H.; Leng, J. Summary on development of permanent magnet synchronous motor. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 689–693. [Google Scholar]
- Li, T.; Sun, X.; Lei, G.; Guo, Y.; Yang, Z.; Zhu, J. Finite-Control-Set Model Predictive Control of Permanent Magnet Synchronous Motor Drive Systems—An Overview. IEEE/CAA J. Automatic. 2022, 9, 2087–2105. [Google Scholar] [CrossRef]
- Dandan, Q.; Yanan, J.; Shuyang, Z. The Study of Permanent Magnet Demagnetization in Permanent Magnet Synchronous Motor. In Proceedings of the 2021 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 27–28 August 2021; pp. 761–764. [Google Scholar]
- Loganayaki, A.; Kumar, R.B. Permanent Magnet Synchronous Motor for Electric Vehicle Applications. In Proceedings of the 2019 5th International Conference on Advanced Computing & Communication Systems (ICACCS), Coimbatore, India, 15–16 March 2019; pp. 1064–1069. [Google Scholar]
- Sun, X.; Cao, J.; Lei, G.; Guo, Y.; Zhu, J. Speed Sensorless Control for Permanent Magnet Synchronous Motors Based on Finite Position Set. IEEE Trans. Ind. Electron. 2020, 67, 6089–6100. [Google Scholar] [CrossRef]
- Huang, J.; Zhu, X.; Li, Y.; Qi, G.; Wu, Y.; He, Y. A New Composite Sensorless Control Strategy for PMSM Used in Electric Vehicle. In Proceedings of the 2022 IEEE Transportation Electrification Conference and Expo, Haining, China, 28–31 October 2022; pp. 1–6. [Google Scholar]
- Thiemann, P.; Mantala, C.; Mueller, T.; Strothmann, R.; Zhou, E. PMSM sensorless control with Direct Flux Control for all speeds. In Proceedings of the 3rd IEEE International Symposium on Sensorless Control for Electrical Drives (SLED 2012), Milwaukee, WI, USA, 21–22 September 2012; pp. 1–6. [Google Scholar]
- Gao, J.; Liu, J.; Gong, C. A High-efficiency PMSM Sensorless Control Approach Based on MPC Controller. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA; 2018; pp. 2171–2176. [Google Scholar]
- Lee, H.; Lee, J. Design of Iterative Sliding Mode Observer for Sensorless PMSM Control. IEEE Trans. Control Syst. Technol. 2013, 21, 1394–1399. [Google Scholar] [CrossRef]
- Sun, P.; Ge, Q.; Zhang, B.; Wang, X. Sensorless Control Technique of PMSM Based on RLS On-Line Parameter Identification. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Republic of Korea, 7–10 October 2018; pp. 1670–1673. [Google Scholar]
- Li, H.; Zhang, X.; Xu, C.; Hong, J. Sensorless Control of IPMSM Using Moving-Average-Filter Based PLL on HF Pulsating Signal Injection Method. IEEE Trans. Energy Convers. 2020, 35, 43–52. [Google Scholar] [CrossRef]
- Wu, M.; Xuan, X.; Chen, X. Sensorless estimation and simulation of PMSM based on high-frequency signal injection. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; pp. 3438–3442. [Google Scholar] [CrossRef]
- Suman, K.; Mathew, A.T. Speed Control of Permanent Magnet Synchronous Motor Drive System Using PI, PID, SMC and SMC plus PID Controller. In Proceedings of the 2018 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Bangalore, India, 19–22 September 2018; pp. 543–549. [Google Scholar]
- Zhang, H.-W.; Jiang, D.; Wang, X.-H.; Wang, M.-R. Direct Torque Sensorless Control of PMSM Based on Dual Extended Kalman Filter. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 7499–7504. [Google Scholar]
- Xiong, Y.; Wang, A.; Zhang, T. Sensor-Less Complex System Control of PMSM Based on Improved SMO. In Proceedings of the 2021 6th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 15–17 July 2021; pp. 228–232. [Google Scholar]
- Saadaoui, O.; Khlaief, A.; Abassi, M.; Chaari, A.; Boussak, M. Position sensorless vector control of PMSM drives based on SMO. In Proceedings of the 2015 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2015; pp. 545–550. [Google Scholar]
- Badini, S.S.; Verma, V. A Novel MRAS Based Speed Sensorless Vector Controlled PMSM Drive. In Proceedings of the 2019 54th International Universities Power Engineering Conference (UPEC), Bucharest, Romania, 3–6 September 2019; pp. 1–6. [Google Scholar]
- Ni, Y.; Shao, D. Research of Improved MRAS Based Sensorless Control of Permanent Magnet Synchronous Motor Considering Parameter Sensitivity. In Proceedings of the 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 18–20 June 2021; pp. 633–638. [Google Scholar] [CrossRef]
- Bernardes, T.; Montagner, V.F.; Grundling, H.A.; Pinheiro, H. Discrete-Time Sliding Mode Observer for Sensorless Vector Control of Permanent Magnet Synchronous Machine. IEEE Trans. Ind. Electron. 2014, 61, 1679–1691. [Google Scholar] [CrossRef]
- Ding, L.; Li, Y.W.; Zargari, N.R. Discrete-Time SMO Sensorless Control of Current Source Converter-Fed PMSM Drives with Low Switching Frequency. IEEE Trans. Ind. Electron. 2021, 68, 2120–2129. [Google Scholar] [CrossRef]
- Jiang, T.; Ni, R.; Gu, S.; Wang, G. A Study on Position Estimation Error in Sensorless Control of PMSM Based on Back EMF Observation Method. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021; pp. 1999–2003. [Google Scholar]
- An, Q.; An, Q.; Liu, X.; Zhang, J.; Bi, K. Improved Sliding Mode Observer for Position Sensorless Control of Permanent Magnet Synchronous Motor. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Bangkok, Thailand, 6–9 June 2018; pp. 1–7. [Google Scholar]
- Gong, C.; Hu, Y.; Gao, J.; Wang, Y.; Yan, L. An Improved Delay-Suppressed Sliding-Mode Observer for Sensorless Vector-Controlled PMSM. IEEE Trans. Ind. Electron. 2020, 67, 5913–5923. [Google Scholar] [CrossRef]
- Davila, J.; Fridman, L.; Levant, A. Second-order sliding-mode observer for mechanical systems. IEEE Trans. Autom. Control 2005, 50, 1785–1789. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. A Lyapunov approach to second-order sliding mode controllers and observers. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar] [CrossRef]
- Chen, K.; Song, B.; Xiao, Y.; Xu, L. An Improved Sliding Mode Observer for Sensorless Vector Control of PMSM—A Simulation Study. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 1912–1916. [Google Scholar]
- Zhang, X.; Jiang, Q. Research on Sensorless Control of PMSM Based on Fuzzy Sliding Mode Observer. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 213–218. [Google Scholar]
- Li, Z.; Zhao, X.; Wang, Y.; Yue, C.; Jiang, L. Implementation of a PMSM Sensorless Control Method based on PLL back EMF. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 4916–4921. [Google Scholar]
- Zhou, F.; Yang, J.; Li, B. A Novel Speed Observer Based on Parameter-optimized MRAS for PMSMs. In Proceedings of the 2008 IEEE International Conference on Networking, Sensing and Control, Sanya, China, 6–8 April 2008; pp. 1708–1713. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Stator resistance (Rs/Ω) | 3 |
| Stator inductance (Ls/H) | 0.01 |
| Permanent magnet flux linkage (ψf/(Wb)) | 0.175 |
| Moment of inertia (J/(kg·m^2)) | 0.001 |
| Number of pole pairs | 4 |
| Rated power (Pn/kW) | 1.2 |
| Data Source | Algorithm | Rotor Velocity Error (r/min) | Rotor Position Error (rad) |
|---|---|---|---|
| Reference [32] | An improved SMO based on tanh(x) | 1 | 0.05 |
| Reference [33] | Fuzzy SMO | 2 | - |
| Reference [34] | Sensorless control based on PLL | 5 | 0.087 |
| Reference [35] | A novel MRAS algorithm | 1.5 | - |
| This paper | Traditional SMO | 9.95 | 0.049 |
| This paper | Second-order adaptive SMO | 0.94 | 0.022 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, G.; Cheng, Y.; Wang, Z.; Xiao, Y. Study on a Second-Order Adaptive Sliding-Mode Observer Control Algorithm for the Sensorless Permanent Magnet Synchronous Motor. Processes 2023, 11, 1636. https://doi.org/10.3390/pr11061636
Yao G, Cheng Y, Wang Z, Xiao Y. Study on a Second-Order Adaptive Sliding-Mode Observer Control Algorithm for the Sensorless Permanent Magnet Synchronous Motor. Processes. 2023; 11(6):1636. https://doi.org/10.3390/pr11061636
Chicago/Turabian StyleYao, Guozhong, Yuanpeng Cheng, Zhengjiang Wang, and Yuhan Xiao. 2023. "Study on a Second-Order Adaptive Sliding-Mode Observer Control Algorithm for the Sensorless Permanent Magnet Synchronous Motor" Processes 11, no. 6: 1636. https://doi.org/10.3390/pr11061636