1. Introduction
With the further exploitation of offshore oil and gas resources, the production capacity of some offshore oilfields falls low enough that exploitation must be terminated, at which point it becomes necessary to decommission and relocate the offshore oil and gas facilities. Furthermore, more and more offshore oil and gas facilities have reached their designed service life with serious aging problems, which cause great potential harm to the offshore environment, national defense, marine traffic and fishery resources. Therefore, it is imperative to decommission such exploitation equipment. However, the existing offshore oilfield facilities are mostly large and complex. Together with the unpredictable marine environment, there are many technical problems and equipment limitations in the decommissioning of these facilities [
1]. Therefore, it is necessary to carry out research on double-ship integrated offshore platform decommissioning equipment, and develop professional equipment for decommissioning offshore platforms. Such efforts are of great strategic significance for extending the R&D into offshore engineering equipment, expanding the offshore platform decommissioning market and promoting the development of related industries in China [
2].
Currently, there is little research on the design and development of decommissioning equipment for ex-service offshore resource exploitation facilities. In this paper, one set of double-ship integrated offshore platform decommissioning equipment with a lifting capacity of no less than 20,000 tons is designed. However, considering the complexity of the ocean environment and the randomness among wind, wave and current loads [
3,
4], the decommissioning equipment will inevitably bear the combined actions of static loads and various dynamic loads during operation, and the strength and stability of the overall unit and the connections between different modules will confront extreme challenges. Therefore, it is necessary to study the dynamic response characteristics of the lifting arm system of the double-ship integrated offshore platform decommissioning equipment under various loads to provide basic support for the structural design and optimization of critical connecting parts, and to ensure the normal and safe operations of the decommissioning system.
The extant research into the dynamic response characteristics of all kinds of large-scale equipment by researchers both at home and abroad provides a powerful reference for the research into the dynamic response characteristics of the lifting arm system in the double-ship integrated offshore platform decommissioning equipment in this paper. Lan et al. [
5] included the kinematic equation in the kineto-elastodynamic coupling effects, and the entire equation was expressed explicitly, avoiding the time derivative of the transformation matrix. Guo et al. [
6] developed the coupled dynamics equation by using the Lagrange equation for the coupling effect between the motion and elastic deformation of a full-wing solar-powered unmanned aerial vehicle. Regarding multi-body dynamics modeling, Chung et al. [
7] established a dynamic model of a spur gear transmission system containing damping particles using two-way coupling with multi-body dynamics and a discrete element method. The dynamic equation of the multi-body system was derived using the Euler–Lagrange formalism. Paolo et al. [
8] derived the orbit motion equation of a spacecraft based on the interactions among the fuel slosh, the attitude dynamics and the flexible appendages of a spacecraft, which were studied via a classical multi-body dynamics approach. Sun et al. [
9] simulated the flexible dynamic response characteristics of a boom based on the multi-body dynamic software RecurDyn, and the results showed that modeling and simulation based on rigid–flexible multi-body coupling dynamic modeling and analysis technologies reproduced the actual working conditions truly. Zhang et al. [
10] solved the motion equation of the constrained rigid–flexible multi-body system using the implicit Adams algorithm.
The lifting arm and the supporting structure are of special importance. As key elements of the double-ship integrated offshore platform decommissioning equipment, their design and optimization directly determine whether the technical indicators will be realized, as well as affecting the safety and reliability of the operations of the whole decommissioning equipment. Since the physical size of the equipment is huge, it is difficult to test in laboratory conditions. A scaled-down simulation test is the only way to solve the problem. The principle of similitude is important for the scaled-down simulation test, such as similitude stress and strain, similitude geometric size, similitude load and so on.
Regarding model experiments, Sheng et al. [
11] expounded the theoretical basis and simulation process of dynamic analysis. Firstly, the modal of the structure was extracted, and then dynamic analysis of random vibration and shock vibration was carried out on the airborne radar frame structure. The results showed that the frame structure met the design requirements. Do et al. [
12] developed dynamic equations of general robots with both prismatic and revolute joints and performed modal analysis for robotic manipulators with rigid links and flexible joints. Wang et al. [
13] analyzed the dynamic performance of a high-speed precision-machining center column based on the theory of structural dynamic analysis. The structure of the column was optimized based on the dynamic analysis results. Wu et al. [
14] established a similitude scale model to predict the characteristics of elastically restrained flat plates based on the theory of dimensional analysis. According to the principle of similitude, Murugan et al. [
15] obtained the scaling law for models, which they used to carry out free vibration analysis of structures, and validated the similitude relationship between the prototype and the model. Wu et al. [
16] determined the similitude size of the experimental model according to similitude conditions and dimensional analysis, and finally verified the derived scaling law through experiments. Rezaeepazhand et al. [
17] proved the applicability of the principle of similitude when designing scaled-down models to predict the buckling behavior of a delaminated beam subjected to uni-axial compression. The results indicated that, based on structural similitude, a set of scaling laws can be found that can be used to develop design rules for small-scale models. Kim et al. [
18] proposed an algorithm suitable for pseudo-dynamic testing that takes into account the equivalent multiphase similitude law based solely on strain levels. Pairod et al. [
19] derived a scaling law for the vibration response of a rectangular plate and validated it with the experimental results. Zhu et al. [
20] used the structural sensitivity analysis method to evaluate the scaling factors, obtained an accurate distorted scaling law and discussed the existing problems and potential of the dynamic similitude theory in an analysis of structural vibration and shock problems.
In order to adapt to the trend of international ocean engineering development, especially for the decommissioning of super-large offshore structures, this paper conducts a dynamic analysis of the critical lifting arm system in self-designed double-ship integrated offshore platform decommissioning equipment in complicated sea states, proposes a hydrodynamic test method with an integrated decommissioning multi-dimensional vibration test bench and performs experimental verification. In this paper, the calculation conditions of the flexible lifting arm are determined through analysis, and dynamic equations of the flexible lifting arm unit and system are established. The dynamic equation of the flexible lifting arm is solved by using a simulation model built by numerical simulation software, and dynamic comparison analysis under specific working conditions is carried out. Finite element models of the key force-bearing parts of the integrated decommissioning equipment, namely the lifting arm, are built, and modal analysis and transient analysis of the lifting arm in specific operating conditions are performed. The obtained transient analysis results are compared with the calculated values under a static load. Finally, according to the stress–strain similitude principle, a hydrodynamic test method with an integrated decommissioning multi-dimensional vibration test bench is proposed for the double-ship integrated offshore platform decommissioning equipment. The test bench is built and dynamic experiments are carried out, and the experimental results are compared with the simulation results to complete the dynamic characteristics analysis experiment of the lifting arm in complicated sea states.
2. Problem Description of the Lifting Arm System
On the basis of a comprehensive analysis of the technical features of the existing offshore platform decommissioning solutions worldwide, an integrated double-ship offshore platform decommissioning solution is proposed, as shown in
Figure 1.
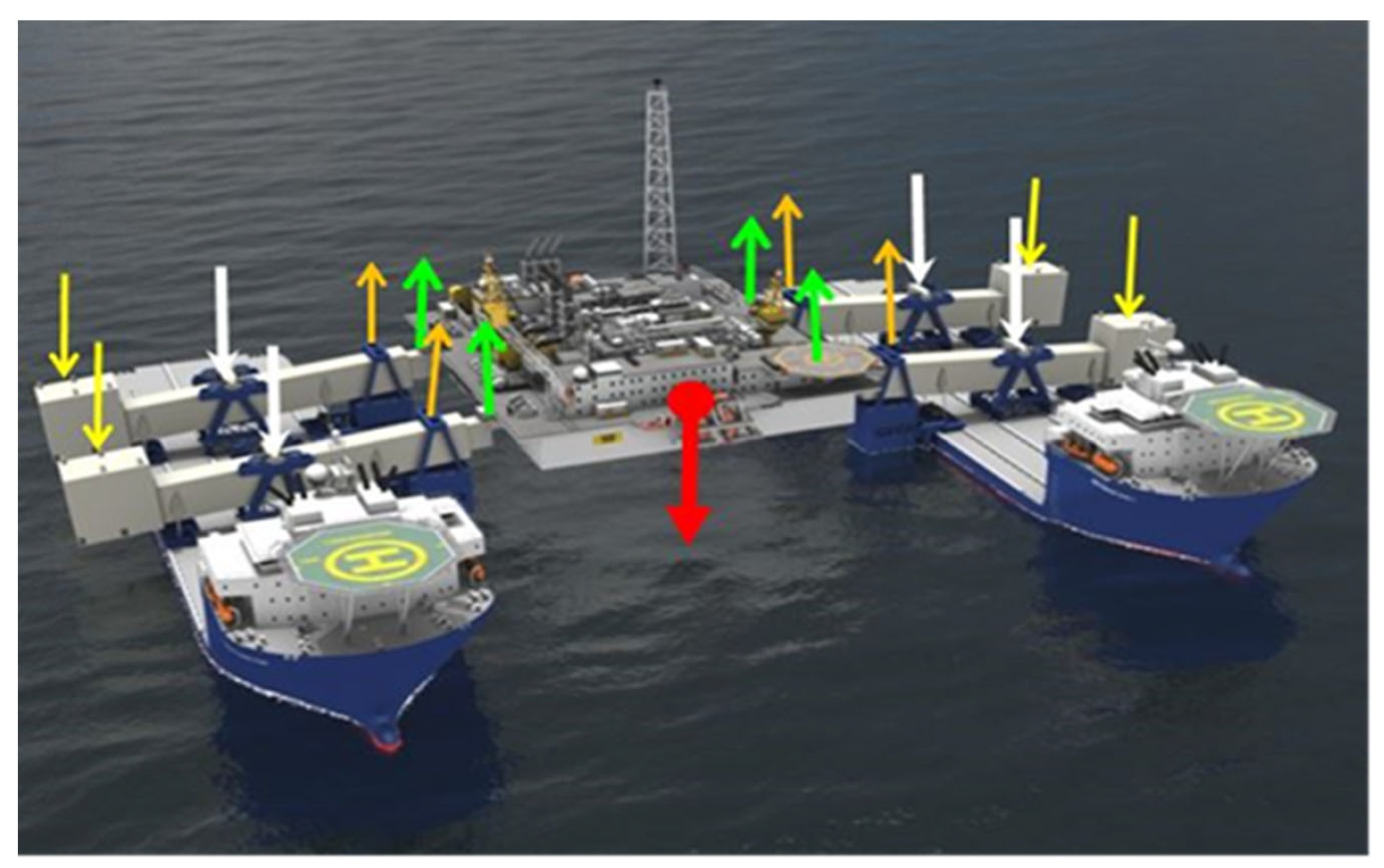
This decommissioning solution consists of three semi-submersible barges equipped with a DP3 positioning system, two of which are for decommissioning operations and the other for transportation. During operations, the two semi-submersible barges will provide a lifting force of over 30,000 tons in total and the other barge will ship the decommissioned platform away.
The lifting arms are connected flexibly internally. Each lifting arm can work individually, which ensures flexible installation and decommissioning of the topside, supports and submarine structures of the drilling and exploitation platforms. The lifting arms and the hulls are connected tightly with a stable internal structure. The lifting principle of the solution is illustrated in
Figure 2. The buoyancy tanks of the lifting arms provide a moment upward (as marked by the orange arrows), the ballast tanks provide a moment downward (as marked by the yellow arrows) and the two semi-submersible barges serve as the supporting points (as marked by the white arrows) to generate a lifting force upward (as marked by the green arrows) at the end of the lifting arm, so as to lift the platform to be decommissioned.
There are multiple dynamic processes with different properties when the decommissioning system is working. When establishing the dynamics model of the lifting arm, only the dynamic process that plays a leading role needs to be analyzed. Since the stage where the lifting arm lifts the offshore platform and moves with the wave lasts the longest and is most easily affected by the waves, it is necessary to carry out a dynamic analysis of the lifting arm in this stage.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}