

CFD Numerical Simulation Study Based on Plunger Air Lift

Abstract
:1. Introduction
2. Research Content and Methodology
2.1. Indoor Simulation Experiment and Result Analysis
2.1.1. Experimental Equipment and Methods
2.1.2. Analysis of Experimental Results
2.2. Plunger Lift Numerical Simulation
2.2.1. Gas–Liquid Multiphase Flow Models
- (1)
- Mixture model
- continuity equation
- momentum equation
- energy equation
- Relative and drift speeds
- (2)
- Standard k–e model
- (3)
- Dynamic modeling of the upward phase of the plunger
2.2.2. CFD model Building and Boundary Condition Determination
- (1)
- CFD modelling
- (2)
- Boundary condition determination
2.2.3. CFD Simulation Reliability Verification
- (1)
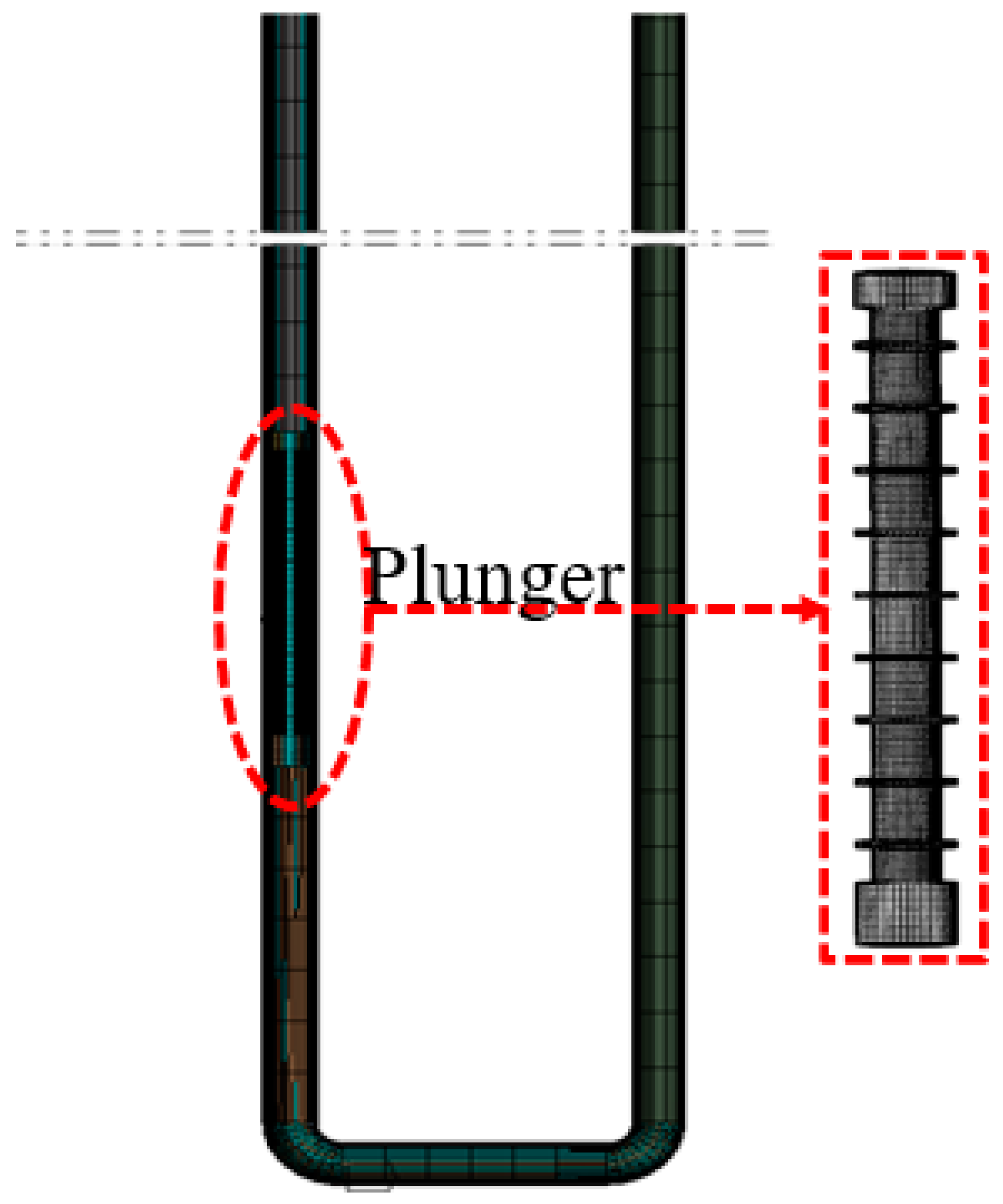
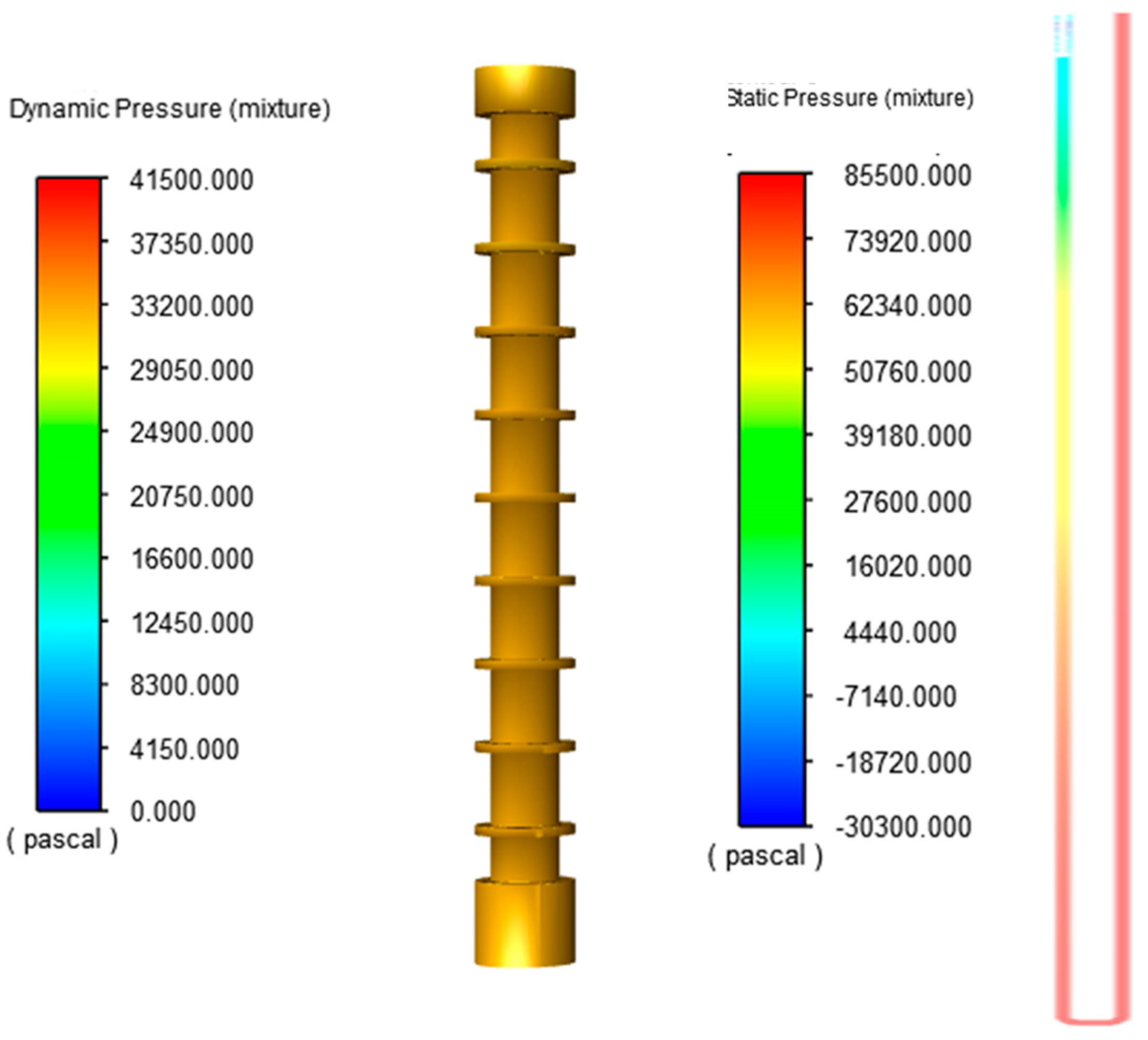
- Analysis of the flow field inside the plunger movement
- (2)
- Comparison of simulation results with experimental data
3. Rodlike Plunger Slot Width Determination
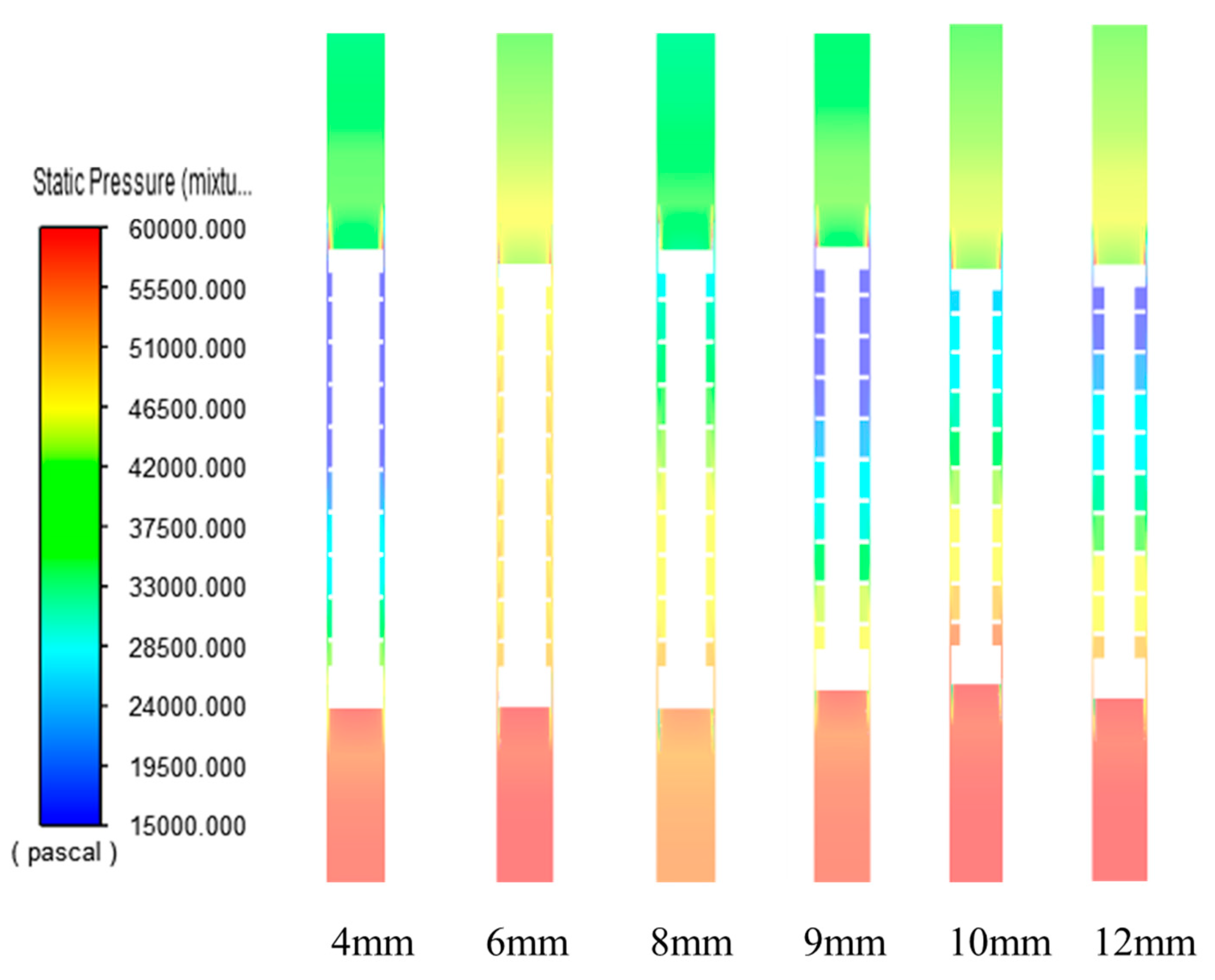
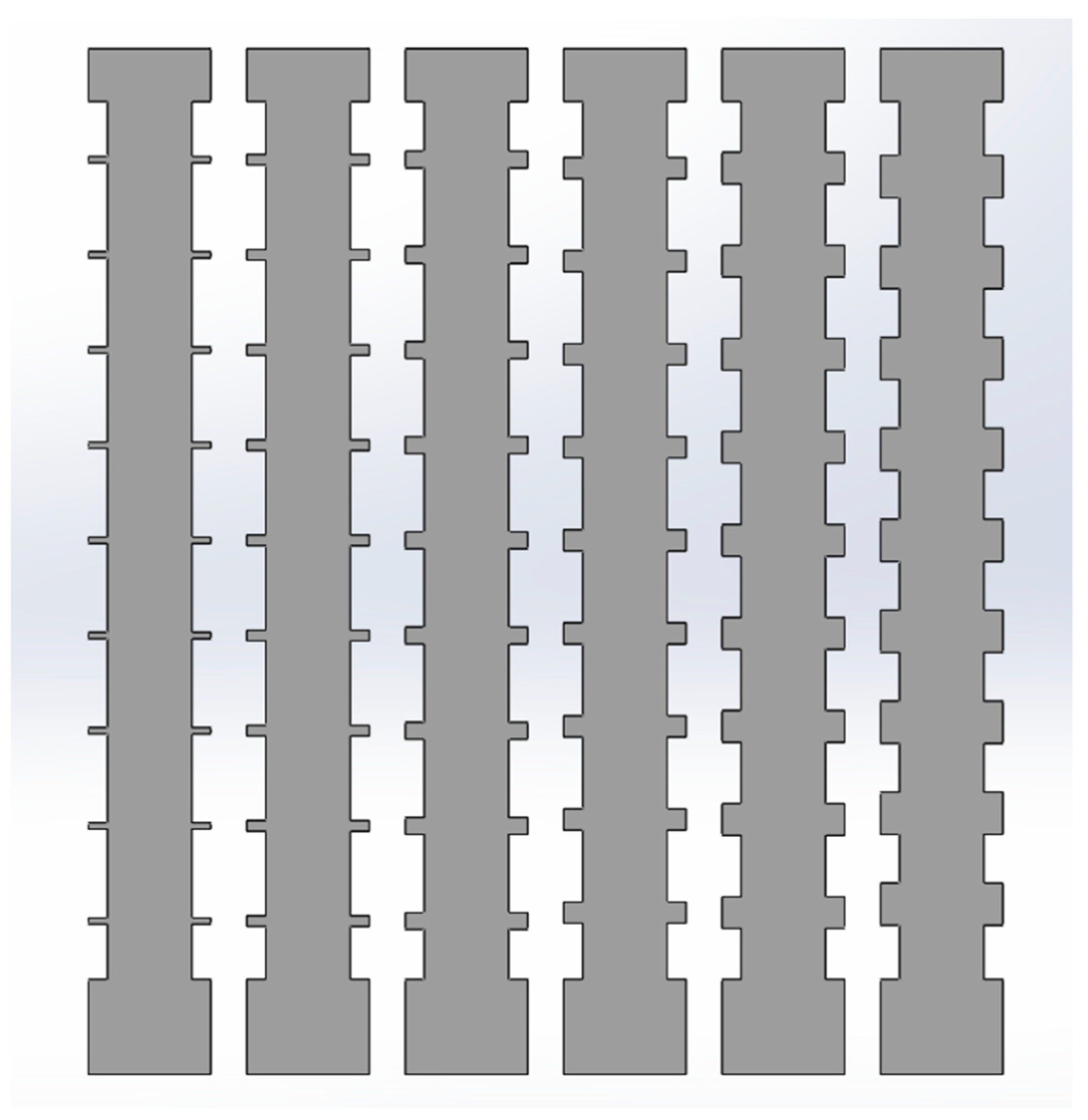
3.1. Influence of Different Groove Depths in the Outer Wall of the Plunger on the Amount of Leakage
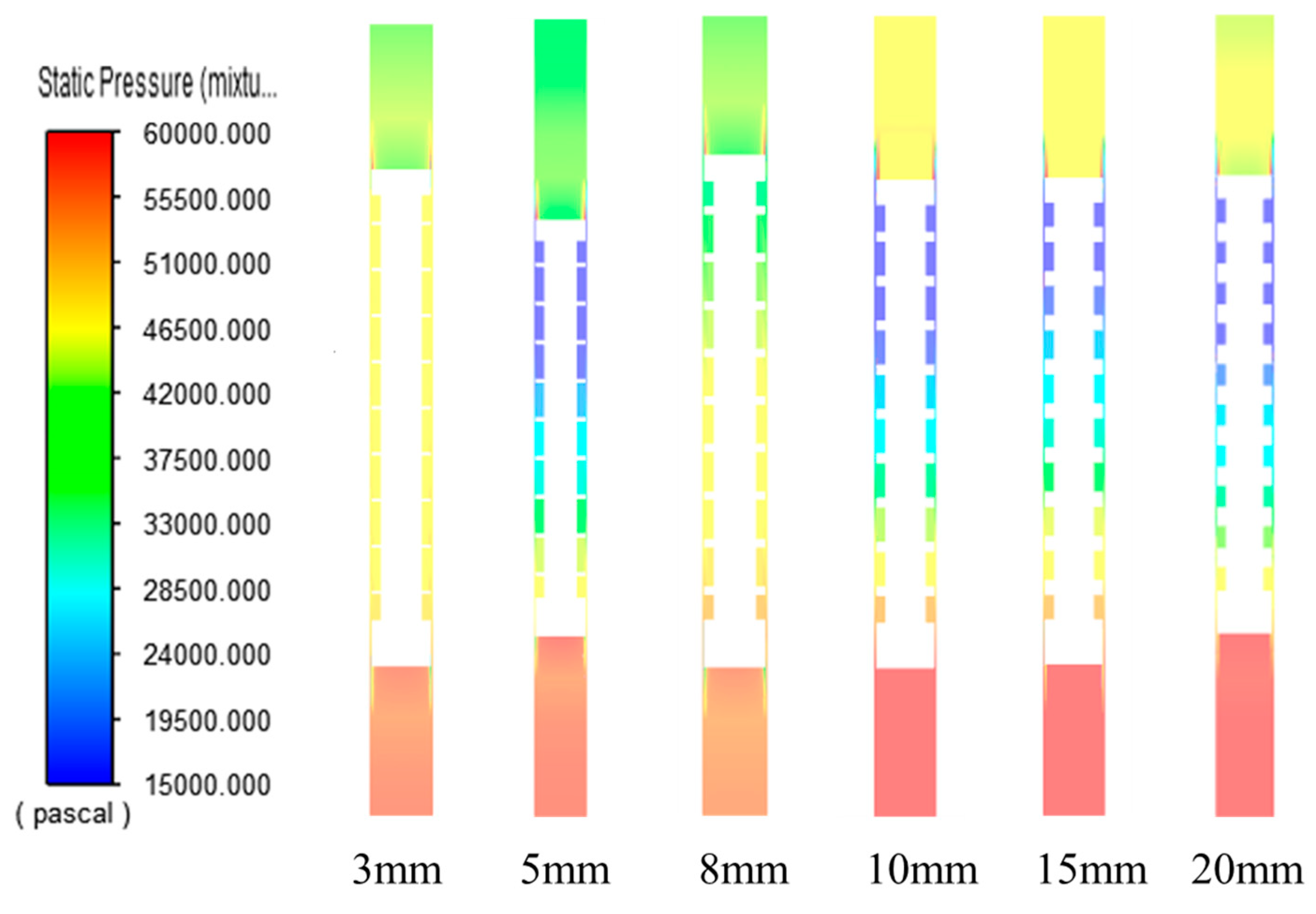
3.2. The Effect of Different Groove Widths on the Amount of Leakage on the Outer Wall of the Plunger
3.3. Effect of Different Number of Grooves in the Outer Wall of the Plunger on the Amount of Leakage
4. Rodlike Plungers in Long Wellbores
4.1. Analysis of Results When the Bottom-Hole Pressure Is Constant and the Differential Pressure Is Changed
4.2. Analysis of Results When the Differential Pressure Is Constant and the Wellhead Pressure Is Changed
5. Conclusions
- An indoor simulation of the plunger air lift was conducted indoors, concluding that the leakage flow rate in the wellbore increases approximately linearly with increasing plunger velocity.
- The CFD numerical simulation was carried out, and the CFD simulation results were compared with the indoor experiments to verify the feasibility of the CFD simulation, and the annular groove structure outside the plunger was improved for the situation that the plunger has a large drainge flow in the wellbore lifting. CFD numerical simulation was used to simulate the plunger wellbore lift with different different groove depths, different groove widths and different numbers of grooves. The overall drainge flow of the plunger movement and the speed of the plunger movement were used as the evaluation criteria, and the obtained simulation results show that the drainge flow in the plunger wellbore is the smallest when the plunger groove depth is 10 mm, the width of each groove is 10 mm, and the number of grooves is 12.
- The movement of the plunger in the wellbore was studied for different bottom-hole pressure differences and wellhead pressure differences. When the pressure at the bottom of the well is 10 MPa, the wellhead pressure cannot be greater than 7 MPa, and if it is greater than 7 MPa, the upward movement of the plunger in the wellbore cannot reach the wellhead. If you want to ensure the feasibility of the plunger air-lift process, it is necessary to ensure sufficient differential pressure at the bottom of the well and differential pressure at the wellhead. Moreover, increasing the pressure difference between the bottom hole and the wellhead can improve the liquid discharge effect of the plunger in the upward movement of the wellbore. When the wellbore and wellhead pressure difference is kept at 7 MPa, the plunger cannot continue to move upward in the wellbore when the wellhead pressure exceeds 18 MPa. Therefore, in the actual application of the plunger lifting process, it is necessary to ensure that the wellhead pressure is not too large, and to increase the pressure difference between the bottom hole and the wellhead as much as possible.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- White, G.W. Combine Gas Lift Plungers to Increase Production Rate. World Oil 1982, 195, 69–76. [Google Scholar]
- Foss, D.L.; Gaul, R.B. Plunger-lift Performance Criteria with Operating Experience-Venture Avenue Field. In Drill and Prod Practice; OnePetro: Richardson, TX, USA, 1965; pp. 124–140. [Google Scholar]
- Liu, H.; Li, M.; Liu, Q.; Zhang, L. Research and Application of Plunger Gas Lift Technology in the Fuling Shale Gas Field. Pet. Drill. Tech. 2020, 48, 102–107. [Google Scholar]
- Lea, J.F. Dynamic Analysis of Plunger Lift Operations. J. Pet. Technol. 1982, 34, 2617–2629. [Google Scholar] [CrossRef]
- Tong, Z.; Pei, X.; Shen, Z.; Hao, Z.; Niu, H. A plunger lift and monitoring system for gas wells based on deployment-retrievement integration. Nat. Gas Ind. B 2015, 2, 449–454. [Google Scholar] [CrossRef]
- Sask, D.; Kola, D.; Tuftin, T. Plunger Lift Optimization in Horizontal Gas Wells: Case Studies and Challenges. In Proceedings of the Canadian Unconventional Resourcesand International Petroleum Conference, Calgary, AL, Canada, 19–21 October 2010. [Google Scholar]
- Tian, K.; Gao, E.; Wang, H.; Dou, Y. Numerical Analysis of Flow Field in Eccentric Annular Clearance of Gas-lift Plunger. Sci. Technol. Eng. 2021, 21, 15446–15453. [Google Scholar]
- Cao, Y. Simulation and Optimization of Drainage Gas Recovery by Plunger Lift in Highly Deviated Wells. Master’s Thesis, Southwest Petroleum University, Chengdu, China, 2018. [Google Scholar]
- Ge, K.; Zou, J.; Song, W. Research progress on optimization design of plunger gas lift drainage parameters. Digit. Des. 2017, 6, 21–24+36. [Google Scholar] [CrossRef]
- Liu, C. Study on the Structure and Performance of a New Split Gas-lift Plunger. Master’s Thesis, Northeast Petroleum University, Daqing, China, 2021. [Google Scholar]
- Duan, J. Two-Piece Plunger Lift Technology Research and Application. Master’s Thesis, Southwest Petroleum University, Chengdu, China, 2013. [Google Scholar]
- Longfellow, N.; Green, D. Computational Fluid Dynamics for Horizontal Well Plunger Lift System Design. SPE 169585-MS. In Proceedings of the SPE Western North American and Rocky Mountain Joint Meeting, Denver, CO, USA, 15–18 April 2014. [Google Scholar]
- Liu, Y.; Huang, Q.; Du, J.; Ma, H.; Xu, Z. Optimization of Solid Plunger’s Structure. J. Southwest Pet. Univ. 2019, 41, 181–186. [Google Scholar]
- Duan, J.; Li, Y.; Zhong, H. Numerical simulation of new type plunger gas-it fuid flow field based on fluent. J. Oil Gas Technol. 2014, 36, 117–120. [Google Scholar]
- Wang, X. The Optimization Design of Plunger Gas Lift Sealing Structure and Its Flow Characteristics Analysis of Clearance Flowing. Thesis, Xi’an Shiyou University, Xi’an, China, 2019. [Google Scholar]
- Li, L. CFD Simulation and Process Parameter Optimization of Gas Well Plunger Lifting. China Pet. Mach. 2020, 48, 104–112. [Google Scholar]
- Zhou, Q. Design and Simulation Analysis of Self-Adaptive Plunger for Natural Gas Production; Harbin Institute of Technology: Harbin, China, 2020. [Google Scholar]
- Xiaoya, F. Process Design and Lifting Capacity Analysis of Plunger Gas Lift. Master’s Thesis, Yangtze University, Jingzhou, China, 2020. [Google Scholar]
- Shi, H. Study on Liquid Leakage Model of Rod Plunger Gas Lift. J. Southwest Pet. Univ. 2022, 37, 101–106+136. [Google Scholar]
- Zhang, J. Analysis of gas lift plunger drainage mechanism and operation law based on CFD. Mach. Des. Manuf. Eng. 2023, 52, 95–99. [Google Scholar]
- Miao, S.; Liu, X.; Feng, X.; Shi, H.; Luo, W.; Liu, P. A Dynamic Plunger Lift Model for Shale Gas Wells. Fluid Dyn. Mater. Process. 2023, 19, 1735–1751. [Google Scholar] [CrossRef]
- Ren, Z.A.; Hao, D.; Xie, H.J. Several turbulence models and their applications in FLUENT. Chem. Equip. Technol. 2009, 30, 38–40+44. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Speed (m/s) | Drainge Flow (kg) | |
|---|---|---|
| Experimental data | 10.37 | 0.308 |
| Analogue data | 9.26 | 0.352 |
| Inaccuracies | 10.7 cent | 12.5 cent |
| Serial number | 1 | 2 | 3 | 4 | 5 | 6 |
| Slotting depth (mm) | 4 | 6 | 8 | 9 | 10 | 12 |
| Serial number | 1 | 2 | 3 | 4 | 5 | 6 |
| Slotted width (mm) | 3 | 5 | 8 | 10 | 15 | 20 |
| Serial number | 1 | 2 | 3 | 4 | 5 |
| Number of slots (pcs) | 5 | 7 | 9 | 12 | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, Q.; Wang, G.; Mei, H.; Qiu, M.; Tang, Y.; Zhang, S.; Zhou, H.; Liao, R.; Zhang, M. CFD Numerical Simulation Study Based on Plunger Air Lift. Processes 2023, 11, 3103. https://doi.org/10.3390/pr11113103
Xia Q, Wang G, Mei H, Qiu M, Tang Y, Zhang S, Zhou H, Liao R, Zhang M. CFD Numerical Simulation Study Based on Plunger Air Lift. Processes. 2023; 11(11):3103. https://doi.org/10.3390/pr11113103
Chicago/Turabian StyleXia, Qi, Guowei Wang, Hongshan Mei, Minwei Qiu, Yuqiang Tang, Shimao Zhang, Hao Zhou, Ruiquan Liao, and Manlai Zhang. 2023. "CFD Numerical Simulation Study Based on Plunger Air Lift" Processes 11, no. 11: 3103. https://doi.org/10.3390/pr11113103