
State Feedback Stabilization for a Class of Upper-Triangular Stochastic Nonlinear Systems with Time-Varying Control Coefficients

{kind=link}
Abstract
:1. Introduction
2. Relevant Definitions
3. Main Results
3.1. State Feedback Control of Nominal Systems
3.2. State Feedback Control and Stability Analysis
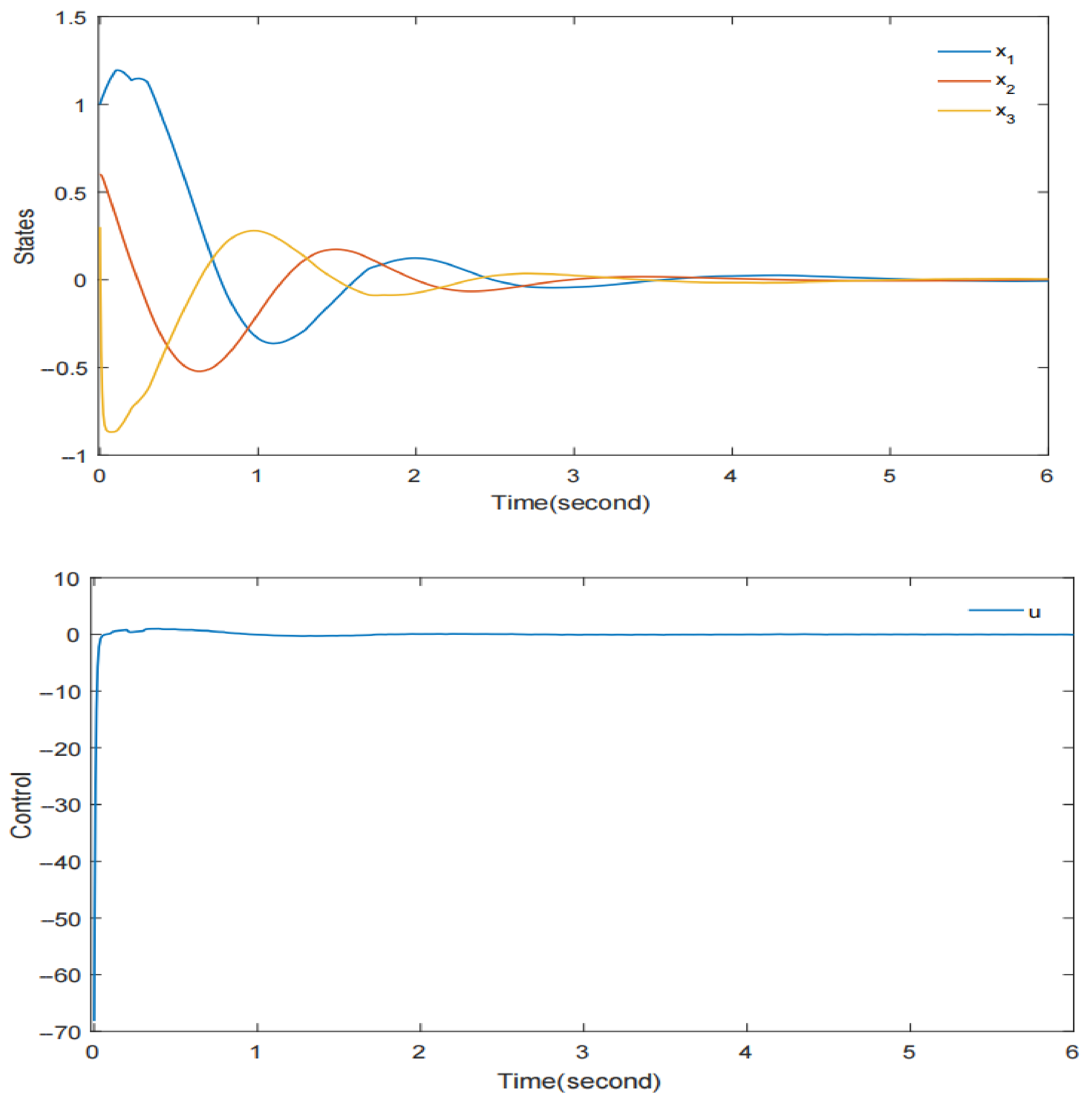
4. A Simulation Example
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Wang, Y.H.; Zhang, T.L.; Zhang, W.H. Feedback stabilization for a class of nonlinear stochastic systems with state- and control-dependent noise. Math. Probl. Eng. 2014, 2014, 484732. [Google Scholar] [CrossRef]
- Tian, J.; Xie, X.J. Adaptive state-feedback stabilization for high-order stochastic non-linear systems with uncertain control coefficients. Int. J. Control 2007, 80, 1503–1516. [Google Scholar] [CrossRef]
- Cui, R.H.; Xie, X.J. Adaptive state-feedback stabilization of state-constrained stochastic high-order nonlinear systems. Sci. China Inf. Sci. 2021, 64, 200203. [Google Scholar] [CrossRef]
- Ku, C.C.; Yeh, Y.C.; Lin, Y.H.; Hsieh, Y.Y. Fuzzy static output control of T-S fuzzy stochastic systems via line integral Lyapunov function. Processes 2021, 9, 697. [Google Scholar] [CrossRef]
- Li, W.Q.; Yao, X.X.; Krstic, M. Adaptive-gain observer-based stabilization of stochastic strict-feedback systems with sensor uncertainty. Automatica 2020, 120, 109112. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Stochastic adaptive nonlinear control with filterless least-squares. IEEE Trans. Autom. Control 2021, 66, 3893–3905. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Mean-nonovershooting control of stochastic nonlinear systems. IEEE Trans. Autom. Control 2021, 66, 5756–5771. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Stochastic nonlinear prescribed-time stabilization and inverse optimality. IEEE Trans. Autom. Control 2022, 67, 1179–1193. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Prescribed-time output-feedback control of stochastic nonlinear systems. IEEE Trans. Autom. Control 2022, 63, 1. [Google Scholar] [CrossRef]
- Fotakis, J.; Grimble, M.; Kouvaritakis, B. A comparison of characteristic locus and optimal designs for dynamic ship positioning systems. IEEE Trans. Autom. Control 1982, 27, 1143–1157. [Google Scholar] [CrossRef]
- From, P.J.; Gravdahl, J.T.; Lillehagen, T.; Abbeel, P. Motion planning and control of robotic manipulators on seaborne platforms. Control Eng. Pract. 2011, 19, 809–819. [Google Scholar] [CrossRef]
- Sun, X.Y.; Gao, Y.; Liu, Q.S. Event-triggered communication scheme for stochastic systems in wireless sensor networks. J. Algorithms Comput. 2020, 14, 1748302620907542. [Google Scholar]
- Jiang, X.S.; Tian, S.P.; Zhang, T.L.; Zhang, W.H. Stability and stabilization of nonlinear discrete-time stochastic systems. Int. J. Robust Nonlinear 2019, 29, 6419–6437. [Google Scholar] [CrossRef]
- Jiang, M.M.; Xie, X.J. State feedback stabilization of stochastic nonlinear time-delay systems: A dynamic gain method. Sci. China Inf. Sci. 2020, 64, 119202. [Google Scholar] [CrossRef]
- Jiang, X.S.; Zhao, D.Y. Event-triggered fault detection for nonlinear discrete-time switched stochastic systems: A convex function method. Sci. China Inf. Sci. 2021, 64, 200204. [Google Scholar] [CrossRef]
- Li, W.Q.; Liu, L.; Feng, G. Cooperative control of multiple nonlinear benchmark systems perturbed by second-order moment processes. IEEE Trans. Cybern. 2020, 50, 902–910. [Google Scholar] [CrossRef]
- Li, W.Q.; Liu, L.; Feng, G. Distributed output-feedback tracking of multiple nonlinear systems with unmeasurable states. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 477–486. [Google Scholar] [CrossRef]
- Fang, L.D.; Ding, S.H.; Park, J.H.; Ma, L. Adaptive fuzzy output-feedback control design for a class of p-norm stochastic nonlinear systems with output constraints. IEEE Trans. Circuits-I 2021, 68, 2626–2638. [Google Scholar] [CrossRef]
- Ku, C.C.; Chang, W.J.; Huang, K.W. Novel delay-dependent stabilization for fuzzy stochastic systems with multiplicative noise subject to passivity constraint. Processes 2021, 9, 1445. [Google Scholar] [CrossRef]
- Pan, Z.G.; Basar, T. Adaptive controller design for tracking and disturbance attenuation in parametric strict-feedback nonlinear systems. IEEE Trans. Autom. Control 1998, 43, 1066–1083. [Google Scholar] [CrossRef]
- Pan, Z.G.; Basar, T. Backstepping controller design for nonlinear stochastic systems under a risk-sensitive cost criterion. SIAM J. Control Optim. 1999, 37, 957–995. [Google Scholar] [CrossRef]
- Krstic, M.; Deng, H. Stabilization of Uncertain Nonlinear Systems; Springer: New York, NY, USA, 1998. [Google Scholar]
- Deng, H.; Krstic, M.; Williams, R.J. Stabilization of stochastic nonlinear systems driven by noise of unknown covariance. IEEE Trans. Autom. Control 2001, 46, 1237–1253. [Google Scholar] [CrossRef] [Green Version]
- Deng, H.; Krstic, M. Output-feedback stochastic nonlinear stabilization. IEEE Trans. Autom. Control 1999, 44, 328–333. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.S.; Jiao, L.C.; Li, J. Adaptive NN backstepping out-feedback control for stochastic nonlinear strict-feedback systems with time-varying delays. IEEE Trans. Cybern. 2010, 40, 939–950. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Yin, S.; Gao, H. Adaptive partial-state feedback control for stochastic high-order stochastic nonlinear systems with stochastic input-to-state stable inverse dynamics. Automatica 2015, 47, 2772–2779. [Google Scholar] [CrossRef]
- Cui, R.H.; Xie, X.J. Finite-time stabilization of stochastic low-order nonlinear systems with time-varying orders and FT-SISS inverse dynamics. Automatica 2021, 125, 109418. [Google Scholar] [CrossRef]
- Cui, R.H.; Xie, X.J. Finite-time stabilization of output-constrained stochastic high-order nonlinear systems with high-order and low-order nonlinearities. Automatica 2022, 136, 110085. [Google Scholar] [CrossRef]
- Li, J.; Qian, C.J. Global finite-time stabilization of a class of uncertain nonlinear systems using output feedback. In Proceedings of the 44th IEEE Conference on Decision and Control and the European Control Conference, Seville, Spain, 12–15 December 2005; pp. 2652–2657. [Google Scholar]
- Lan, Q.X.; Li, S.H. Global output-feedback stabilization for a class of stochastic nonlinear systems via sampled-data control. Int. J. Robust Nonlinear 2017, 27, 3643–3658. [Google Scholar] [CrossRef]
- Wu, Z.H.; Deng, F.Q.; Guo, B.Z.; Wu, C.F.; Xiang, Q.M. Backstepping active disturbance rejection control for lower triangular nonlinear systems with mismatched stochastic disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 2688–2702. [Google Scholar] [CrossRef]
- Mazenc, F.; Bowong, S. Tracking trajectories of the cart-pendulum system. Automatica 2003, 39, 677–684. [Google Scholar] [CrossRef]
- Teel, A.R. A nonlinear small gain theorem for the analysis of control systems with saturation. IEEE Trans. Autom. Control 1996, 41, 1256–1270. [Google Scholar] [CrossRef]
- Zha, W.T.; Zhai, J.Y.; Fei, S.M.; Wang, Y.J. Finite-time stabilization for a class of stochastic nonlinear systems via output feedback. ISA Trans. 2014, 53, 709–716. [Google Scholar] [CrossRef]
- Qian, C.J.; Li, J. Global output feedback stabilization of upper-triangular nonlinear systems using a homogeneous domination approach. Int. J. Robust Nonlinear 2006, 16, 441–463. [Google Scholar] [CrossRef]
- Li, W.Q.; Jing, Y.W.; Zhang, S.Y. State-feedback stabilization of a class of upper-triangular stochastic nonlinear systems. Control Decis. 2010, 25, 1543–1546. [Google Scholar]
- Liu, L.; Zhang, Y.F. Decentralised output-feedback control for a class of large-scale stochastic high-order upper-triangular nonlinear systems. Int. J. Syst. Sci. 2016, 48, 838–848. [Google Scholar] [CrossRef]
- Liu, L.; Xing, X.; Gao, M. Global stabilization for a class of stochastic high-order feedforward nonlinear systems via homogeneous domination approach. Circuits Syst. Signal Process. 2016, 35, 2723–2740. [Google Scholar] [CrossRef]
- Bao, X.Y.; Wang, H.; Li, W.Q. Containment control for upper-triangular nonlinear multi-agent systems perturbed by second-order moment processes. IEEE Access 2021, 9, 21102–21111. [Google Scholar] [CrossRef]
- Zhang, T.L.; Deng, F.Q.; Sun, Y.; Shi, P. Fault estimation and fault-tolerant control for linear discrete time-varying stochastic systems. Sci. China Inf. Sci. 2021, 64, 200201. [Google Scholar] [CrossRef]
- Zhang, X.F.; Chen, Z.L. Output-feedback stabilization of nonlinear systems with delays in the input. Appl. Math. Comput. 2005, 167, 1026–1040. [Google Scholar] [CrossRef]
- Du, H.B.; Qian, C.J.; He, Y.G. Global sampled-data output feedback stabilization of a class of upper-triangular systems with input delay. IET Control Theory Appl. 2013, 7, 1437–1446. [Google Scholar] [CrossRef]
- Liu, L.; Gao, M. State feedback control for stochastic feedforward nonlinear systems. Math. Probl. Eng. 2013, 2013, 908459. [Google Scholar] [CrossRef]
- Zhao, C.R.; Xie, J.X. Global stabilization of stochastic high-order feedforward nonlinear systems with time-varying delay. Automatica 2014, 50, 203–210. [Google Scholar] [CrossRef]
- Rasham, T.; Shoaib, A.; Hussain, N.; Alamri, B.A.S.; Arshad, M. Multivalued fixed point results in dislocated b-metric spaces with application to the system of nonlinear integral equations. Symmetry 2019, 11, 40. [Google Scholar] [CrossRef] [Green Version]
- Rasham, T.; Marino, G.; Shahzad, A.; Park, C.; Shoaib, A. Fixed point results for a pair of fuzzy mappings and related applications in b-metric like spaces. Adv. Differ. Equ. 2021, 2021, 259. [Google Scholar] [CrossRef]
- Lin, W.; Qian, C. Adding one power integrator: A tool for global stabilization of high-order lower-triangular systems. Syst. Control Lett. 2000, 39, 339–351. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Yu, H.; Xu, X. State Feedback Stabilization for a Class of Upper-Triangular Stochastic Nonlinear Systems with Time-Varying Control Coefficients. Processes 2022, 10, 1465. https://doi.org/10.3390/pr10081465
Sun X, Yu H, Xu X. State Feedback Stabilization for a Class of Upper-Triangular Stochastic Nonlinear Systems with Time-Varying Control Coefficients. Processes. 2022; 10(8):1465. https://doi.org/10.3390/pr10081465
Chicago/Turabian StyleSun, Xixi, Haisheng Yu, and Xiaoyu Xu. 2022. "State Feedback Stabilization for a Class of Upper-Triangular Stochastic Nonlinear Systems with Time-Varying Control Coefficients" Processes 10, no. 8: 1465. https://doi.org/10.3390/pr10081465