1. Introduction
As an important green renewable energy, wind energy has become a research hotspot in recent years, and the wind power industry has also developed rapidly. By the end of 2021, the cumulative installed capacity of wind turbines in the world has reached 328 million kilowatts, of which the installed capacity of offshore wind power has reached 26.39 million kilowatts [
1]. If calculated according to the 5-year warranty period of wind turbines, about 3 GW capacity of offshore wind turbines are about to or have already gone out of the warranty period [
2]. Therefore, the market potential for wind turbine operation and maintenance is huge. The operating environment of wind turbines is harsh, and the wind turbines are exposed to sand and snow for a long time [
3]. In addition, there is also severe weather such as thunderstorms and fog at sea. According to statistics, the operation and maintenance cost of onshore wind farms is as high as 15% to 20% of the total wind farm revenue, while the operation and maintenance cost of offshore wind farms is much higher than that of onshore wind farms, accounting for about 20% to 25% of the total wind farm revenue [
4]. The high fail rate of wind turbines brings great difficulties to the operation and maintenance of wind farms, and the failure to discover potential faults in time and repeated maintenance of components with a high fail rate will increase the operation and maintenance costs of wind farms.
During the operation stage of the wind farm, the faults of the generator, the gearbox, the transmission system, and the blades are the most common [
5], of which the main bearing of the wind turbine plays a role in transmitting energy to the wind turbine [
6]. As a rotating component, the main bearing is more prone to failure, and the entire unit will stop running after the failure, causing huge economic losses. The vibration signal contains all the useful information about the components and it is also one of the important indicators for analyzing the operating state. The fault diagnosis technology for analyzing the vibration signal of the main bearing is currently the most effective and widely used [
7]. In recent years, some domestic and foreign scholars have introduced artificial intelligence methods into the field of fault diagnosis of rotating components of wind turbines, such as deep learning and so on. Compared with traditional fault diagnosis methods based on statistical analysis methods, the fault diagnosis method based on the neural network does not rely on a large number of signal processing related knowledge and rich expert experience, but the essential characteristics of faults are extracted from massive historical data, avoiding the randomness of manual selection of parameters, and the diagnosis process is more intelligent [
8]. Cao et al. [
9] use Long-Short Term Memory (LSTM) neural network to extract the fault characteristics of vibration signal of wind turbines and perform fault classification and compare this method with the support vector machine method to verify the superiority of the algorithm, the method proposed in this article achieves 97.2% of the classification accuracy of the gearbox. Wu et al. [
10] adopt a convolutional neural network to study the one-dimensional vibration signal of the planetary gearbox. The conclusion shows that the accuracy of the one-dimensional convolutional neural network model for fault diagnosis of planetary gearbox is higher than that of traditional diagnosis methods. Yao et al. [
11] propose a fault diagnosis method for rolling bearings based on a convolutional neural network and recurrent neural network.
The one-dimensional vibration signal is converted into a two-dimensional image signal by the Gram angle field method, and the image signal is input into the model for training, which has a higher fault classification accuracy, experiments show that the method proposed has an accuracy of more than 98.15% for the classification of rolling bearing faults. However, these references ignore that the fault data of offshore wind turbines is often difficult to be obtained, and there is a general problem of insufficient fault samples. In particular, the main bearing fault data of wind turbines accounts for a relatively low proportion of all fault data, and there is a serious unbalanced dataset problem. Therefore, it is difficult for deep learning methods to achieve high fault classification accuracy in this case. Zhou et al. [
12] believe that when most classification algorithms classify unbalanced data, the obtained classification hyperplane will be biased toward a few types of data, which leads to the algorithm misjudging the minority type of data as the majority type of data. In order to obtain sufficient and balanced vibration signal samples, some scholars refer to generative adversarial networks in the field of rolling bearing fault diagnosis. Lu et al. [
13] propose a data enhancement method for the vibration signal of the main bearing of wind turbines based on an auxiliary classification generation adversarial network, which can effectively extract the original data distribution characteristics and generate high-quality vibration signal samples, after using ACGAN to expand the original dataset, the fault classification accuracy of various models is improved by about 2%. Li et al. [
14] improve the auxiliary classification generative adversarial network based on Bayesian optimization and Wasserstein distance, realize data enhancement, and obtained a higher fault classification accuracy of wind turbine planetary gearboxes. The classification accuracy of WAC-GAN could remain above 94% for various types of failures. In addition, due to the harsh operating environment of offshore wind turbines, the signal samples collected by sensors often contain noises. These noises will affect the feature extraction performance of neural networks during training. Traditional signal denoising methods often require a lot of statistical knowledge. Different noise interference is targeted for different noise reduction processing. Zhao et al. [
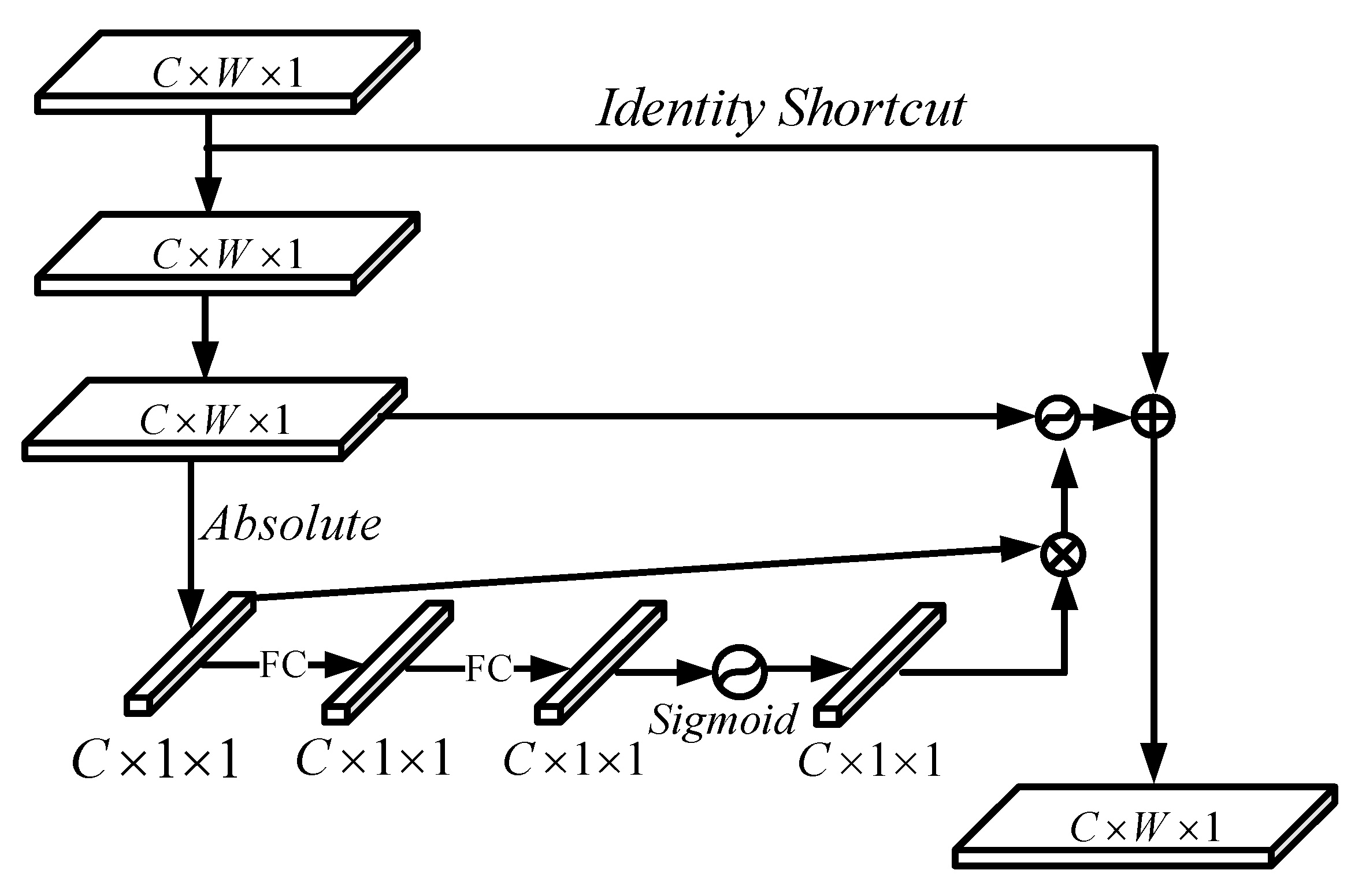
15] propose a deep learning-based feature learning algorithm for noisy data, which integrates the attention mechanism and the idea of a soft threshold, effectively reducing the impact of noise interference on the model, experiments show that in the case of inserting various types of noise, the accuracy of DRSN with channel-wise thresholds (DRSN-CW) is about 3.32% higher than that of ResNet. In [
16], a deep residual shrinkage network is added to the convolutional neural network to achieve signal noise reduction and solve the degradation problem of the multi-layer model. This method has a higher fault classification accuracy reaching 99.5% than the traditional neural network method. However, the above studies do not take into account the unbalanced data of the main bearing of the actual wind turbine, which limited the fault diagnosis capability of the model.
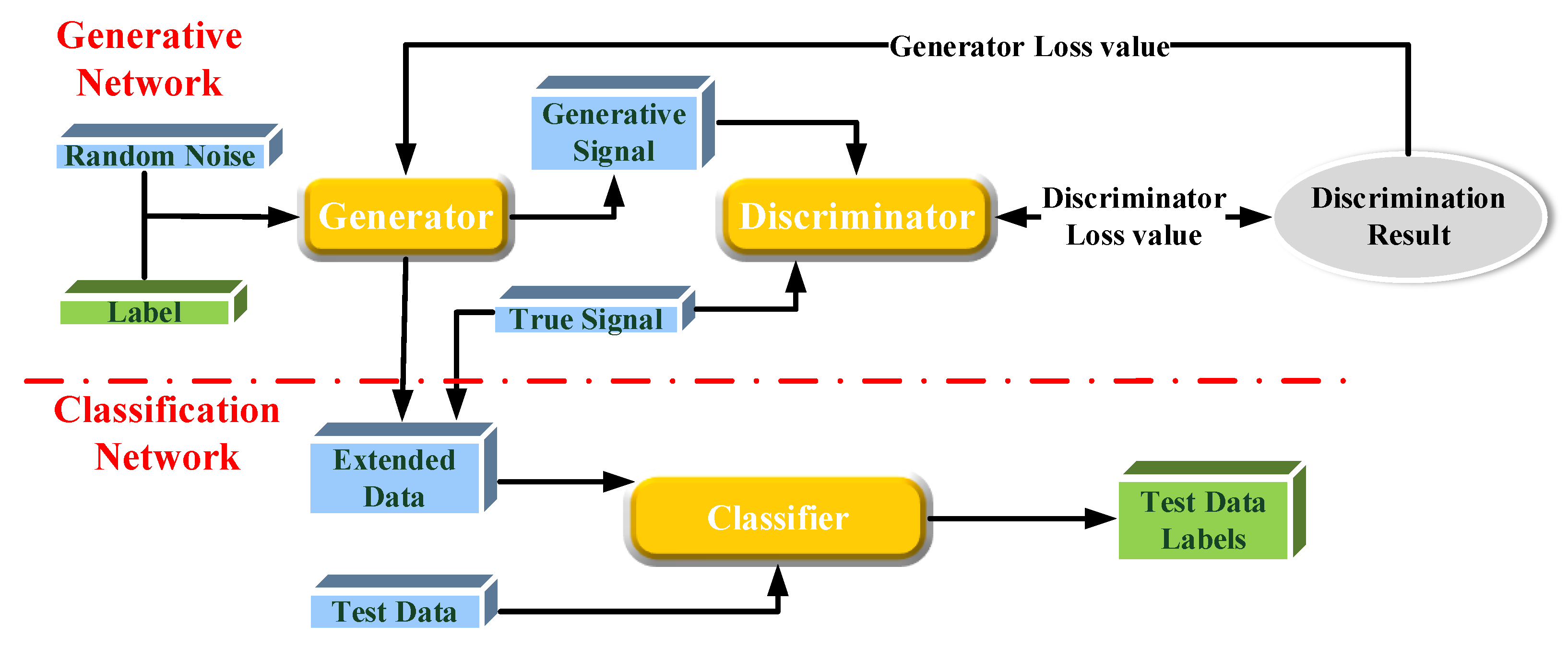
In order to improve the performance of the fault diagnosis model in practical applications, this article focuses on the research on the fault diagnosis method of wind turbine main bearing under noise conditions and proposes a fault diagnosis method of the main bearing of the wind turbine based on the auxiliary classification generate adversarial network and the deep residual shrinkage network. First, the auxiliary classification generative adversarial network is adopted to learn the data distribution of vibration signal samples with different signal-noise ratios, and the datasets of each fault are expanded. Then, the expanded dataset is sent to the deep residual shrinkage network for training. Finally, the test set is fed into the trained deep residual shrinkage network to test the fault classification accuracy of the model. Experimental results show that the proposed method has good fault diagnosis performance in the face of the vibration signal sample of the main bearing of the wind turbine when the actual operation contains noise interference, and the data is unbalanced.
The first chapter of this article is an introduction, the second chapter gives the structure of the model proposed in this article, the third chapter describes the basic principle of the auxiliary classification generative adversarial network, and the fourth chapter describes the basic principle of the deep residual shrinkage network, the fifth chapter uses two experiments to verify the effectiveness of the method proposed in this article, and the sixth chapter gives some conclusions and suggestions.
3. Generative Adversarial Network
In 2014, Lan Goodfellow et al. proposed Generative Adversarial Networks (GAN) [
17]. Since GAN can generate data with a specific distribution, it is an unsupervised deep learning model, so it is widely used in image inpainting, text generation, audio generation, and other fields, and is the research hotspot in the image field in recent years. Because the fault classification algorithm based on deep learning needs a large amount of fault data, and the actual wind turbine main bearing fault data samples are scarce, there is a serious sample imbalance problem between fault data and normal data. In order to improve the accuracy of fault classification, some scholars have introduced the generative adversarial network into the field of fault diagnosis. The generative adversarial network can learn the data distribution of real fault samples to generate new fault samples to supplement the original dataset. Studies have shown that [
18], this method has great potential in the application of time series data generation.
3.1. Generative Adversarial Network Principle
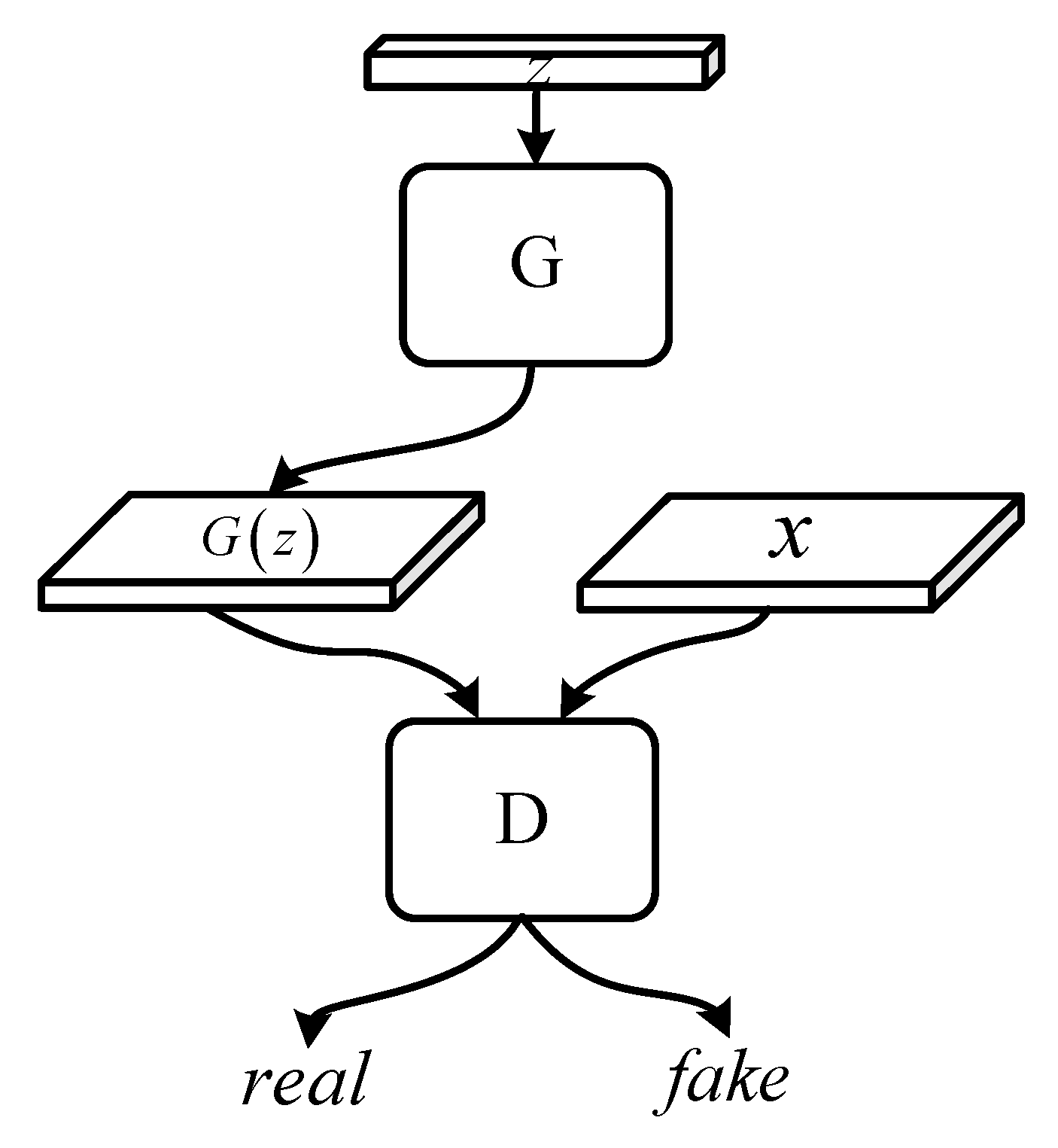
GAN contains two networks, Generator and Discriminator. The application of the generator is to convert the random noise into data that is close to the one-dimensional vibration signal data distribution of the main bearing of the wind turbine as much as possible. The function of the discriminator is to judge the authenticity of the input samples. During the training, the generator and the discriminator game alternately. The game mechanism continuously improves the generation ability of the generator, so that the data generated by the generator is as real as possible and deceives the discriminator to achieve the purpose of being a genuine one.
The training of GAN mainly includes two stages: discriminator training and generator training. In each round of iteration, the generator and the discriminator compete with each other and finally reach the Nash equilibrium, that is, the discriminator classification accuracy rate reaches 50%. The real fault data of the main bearing of a wind turbine or the fake data generated by the generator has a 50% chance of being misjudged, and the generator completes the training. The structure of GAN is shown in
Figure 2.
In the initial stage of training, the capabilities of the generator and the discriminator are very weak. First, the random noise vector is sent to the generator to generate fake samples, fake samples, and the real signal samples are passed through the discriminator to generate scores. The loss function consists of samples and the labels corresponding to these samples, and the gradient is calculated to update the discriminator; then, the parameters of the discriminator are fixed, and fake samples will be sent to the discriminator to get the score since it is hoped that the samples generated by the generator are as real as possible and deceive the discriminator, The optimization goal at this time is to make the score reach 1 to update the generator by calculating the gradient. In the iteration, the generator and the discriminator have trained alternately, and finally, the two networks reach a Nash equilibrium state. At this time, the discriminator cannot distinguish between real samples and fake samples, and the accuracy of the discriminator is 50%. The network objective function is (1):
where
is the mathematical expectation,
and
is the probability that the sample is true or false, respectively,
is the random noise vector, and
is the fake sample generated by the generator. Our mission is to train the discriminator to maximize
and
, and train the generator to minimize
.
The generative model is essentially a maximum likelihood estimation. It is assumed that the initial distribution of the generator is
, where
is the parameter of the distribution. In order to make the generated data distribution close to the real data distribution, it is necessary to calculate the value
to maximize (3). Therefore, the calculation formula is (4):
where
is the likelihood function of the real data,
is the real data distribution, and
is the generated data distribution. GAN adopts KL divergence to measure the distance between two distributions. If the KL divergence reaches the minimum value 0, then the distribution
and
are equal everywhere.
3.2. Auxiliary Classifier Generative Adversarial Networks
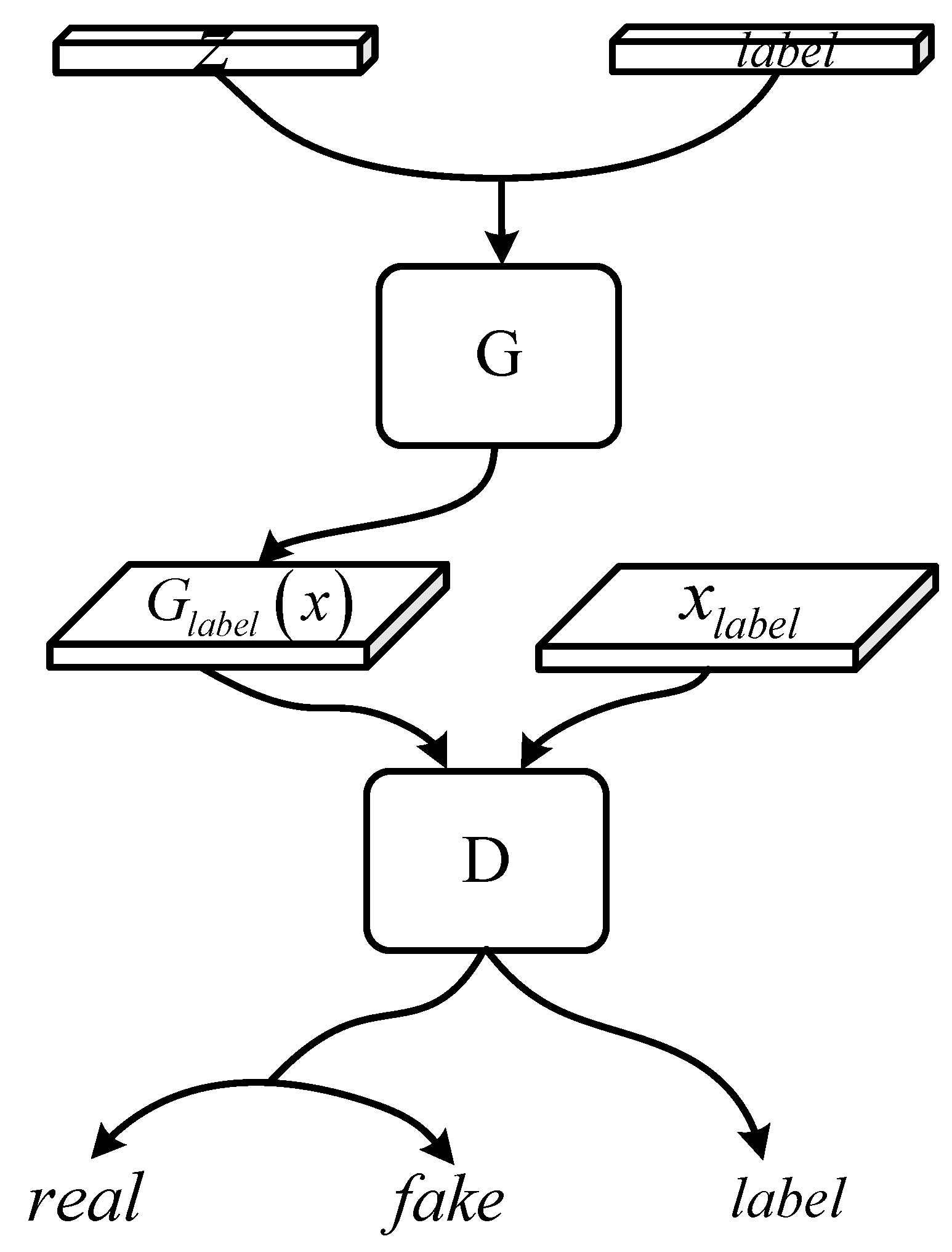
Unlike traditional GAN, Auxiliary Classifier Generative Adversarial Networks (ACGAN) add labels to the random noises which are input to the generator and generate fake fault samples with a specific type of label. Then the true and false fault data samples are input into the discriminator to get the output results, and the output results include both true or false labels and classification labels. The network can be used to generate different types of wind turbine main-bearing fault data in a targeted manner, and the original fault dataset can be expanded into a balanced dataset.
It can be seen from
Figure 3 that ACGAN not only outputs the probability that the fault sample is real data or not but also outputs the fault class probability of the sample. Since ACGAN has category labels when generating and judging samples, it makes the generated fault samples more controllable. The true or false judgment and classification loss functions are (5) and (6), respectively:
where,
is the probability that the sample is real, and
is the probability that the sample is correctly classified. Therefore, in training, the discriminator is trained to maximize
, and the generator is trained to maximize
.
6. Discussion
In order to solve the problem that the vibration fault data of wind turbine main bearing is difficult to be obtained in the condition of noise, resulting in the low fault diagnosis accuracy, this article proposes a fault classification method for wind turbine main bearing based on ACGAN and DRSN. This method has the following advantages:
(1) In view of the problem that the model training accuracy is not high due to insufficient fault data of the main bearing of the wind turbine, this article uses ACGAN to learn the distribution characteristics of fault data from the limited vibration signal samples, and generate high-quality fault samples to achieve data enhancement and improve the classification accuracy of the model;
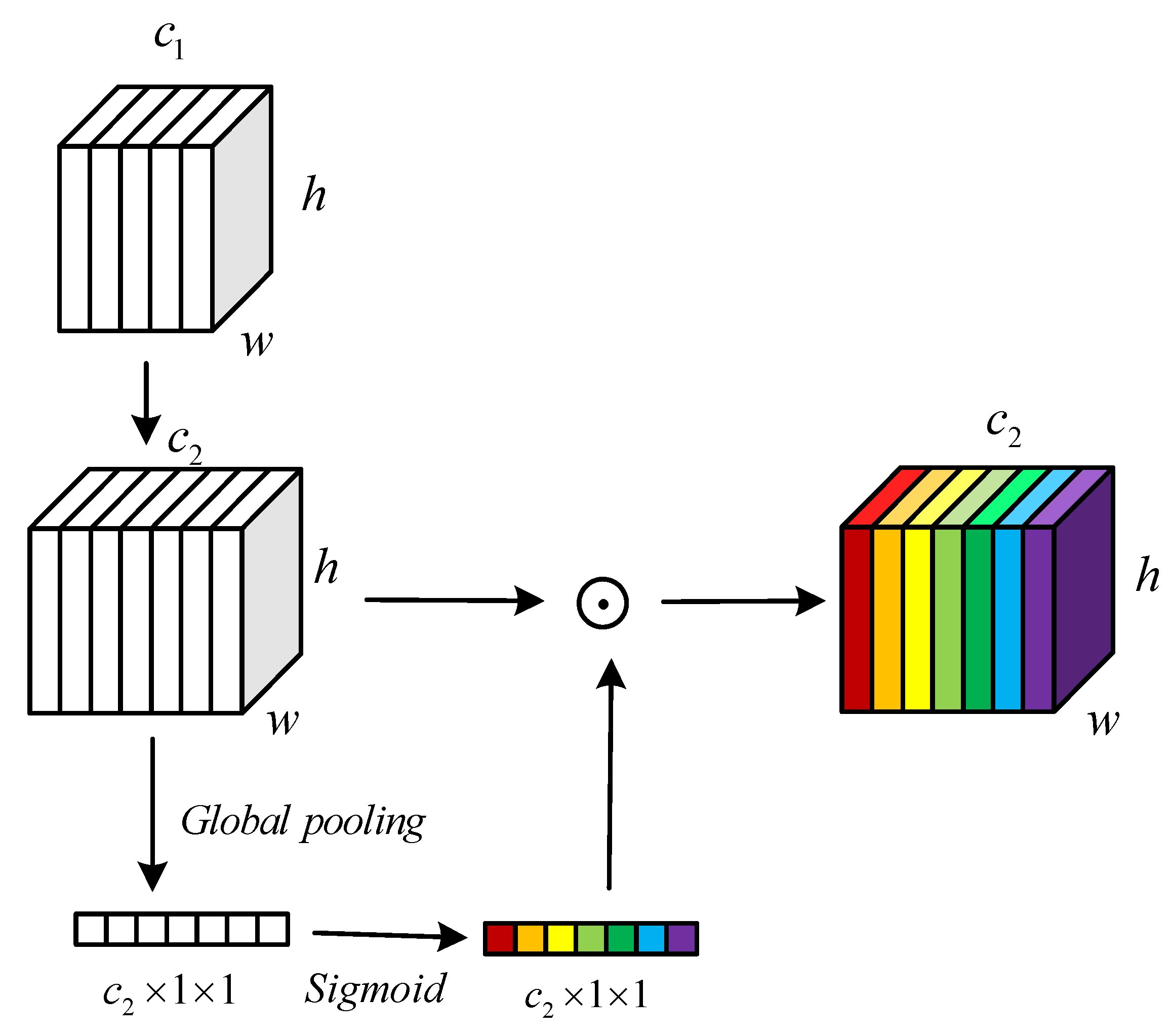
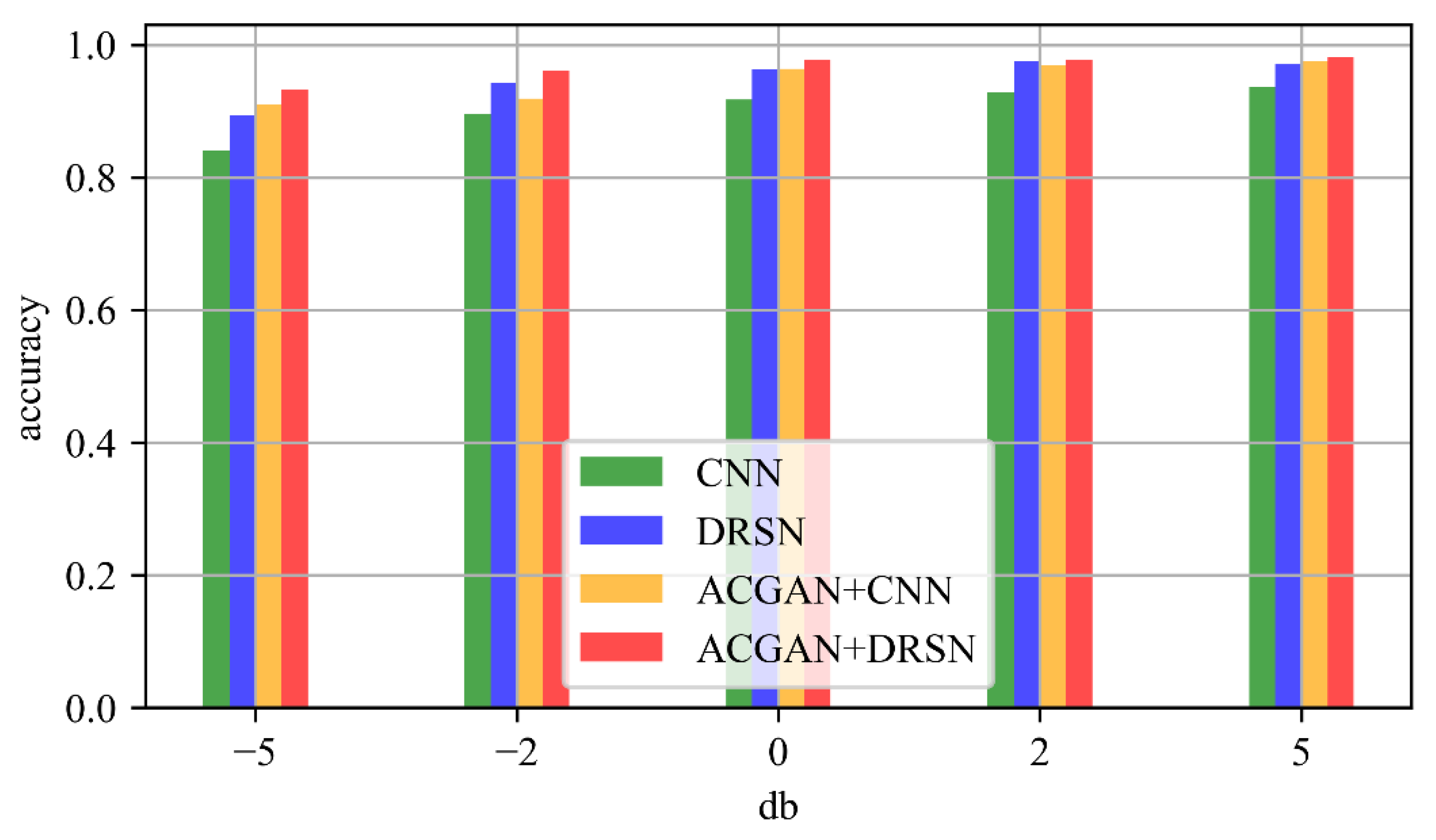
(2) The use of attention mechanism and soft threshold of deep residual shrinkage network as a classification network can effectively reduce the different degrees of noise interference contained in the dataset, and fully explore the data fault characteristics of the main bearing of the wind turbines;
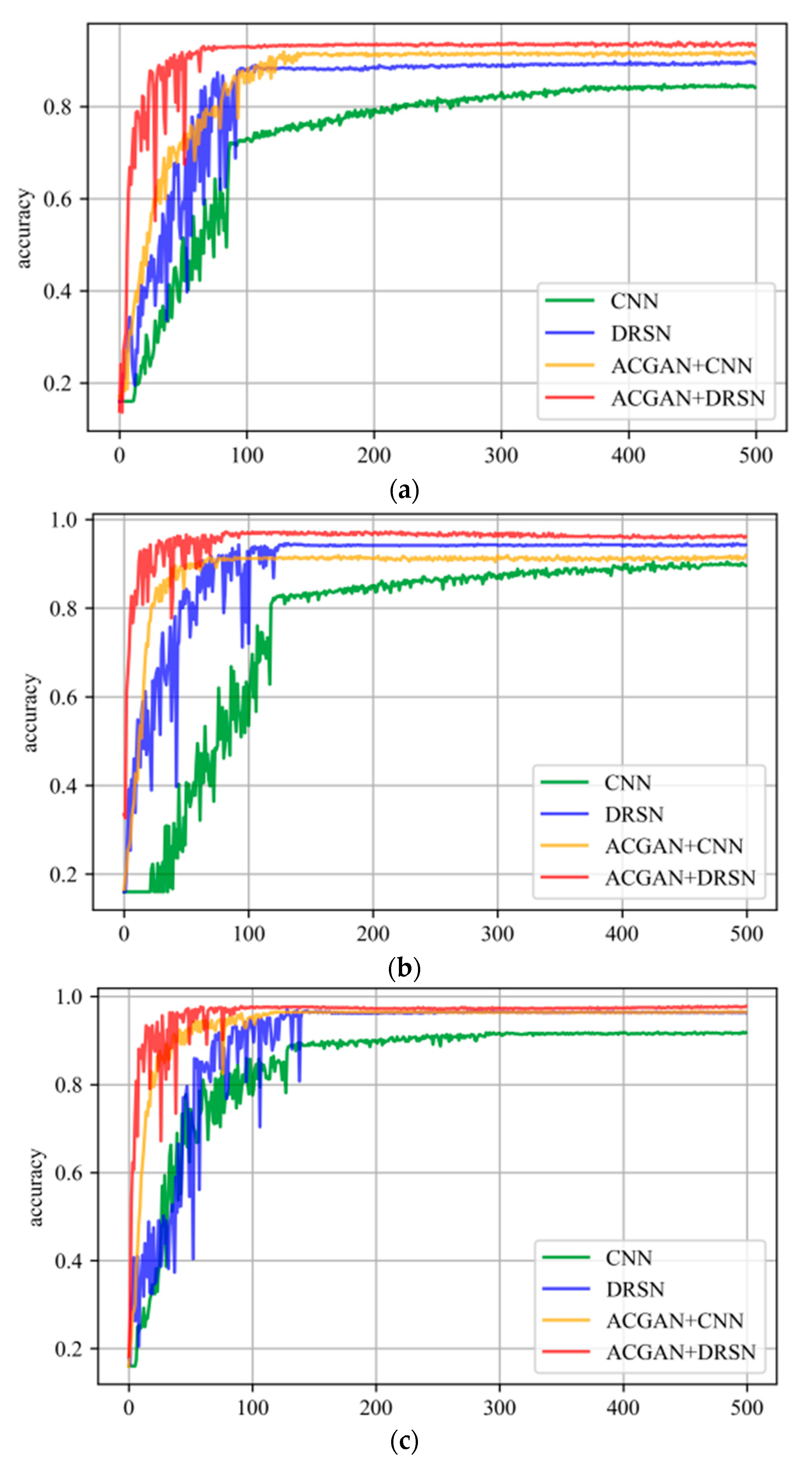
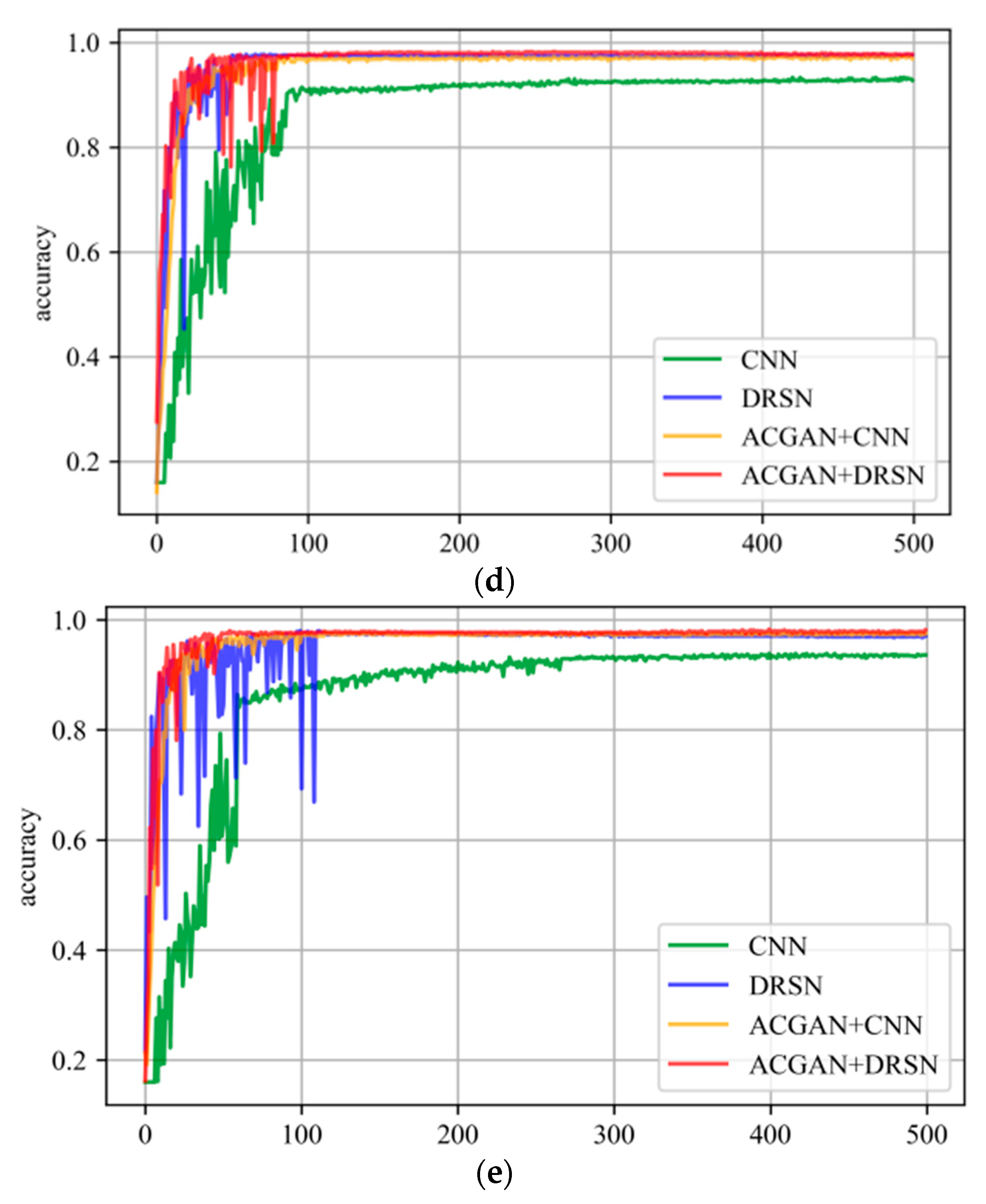
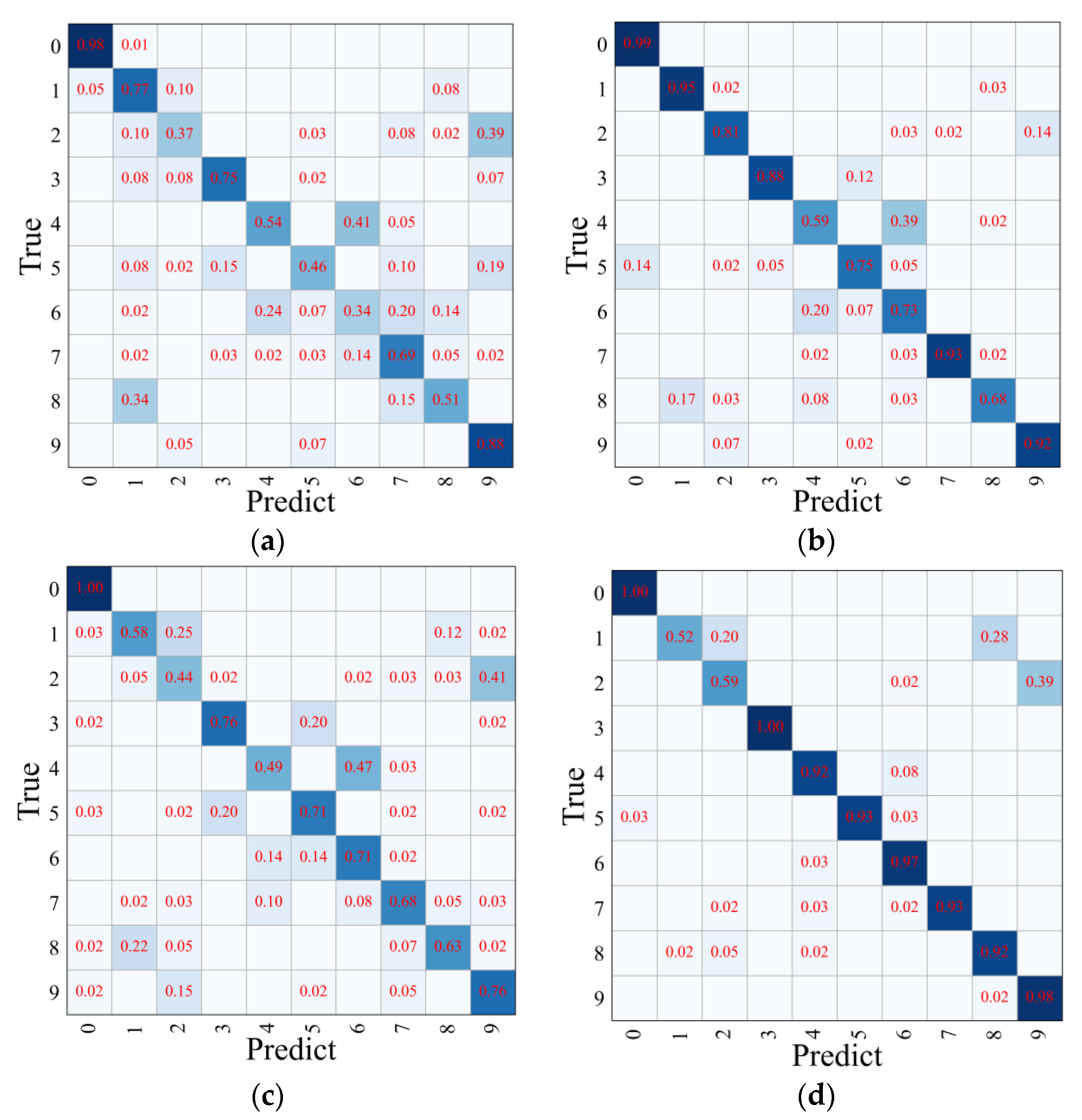
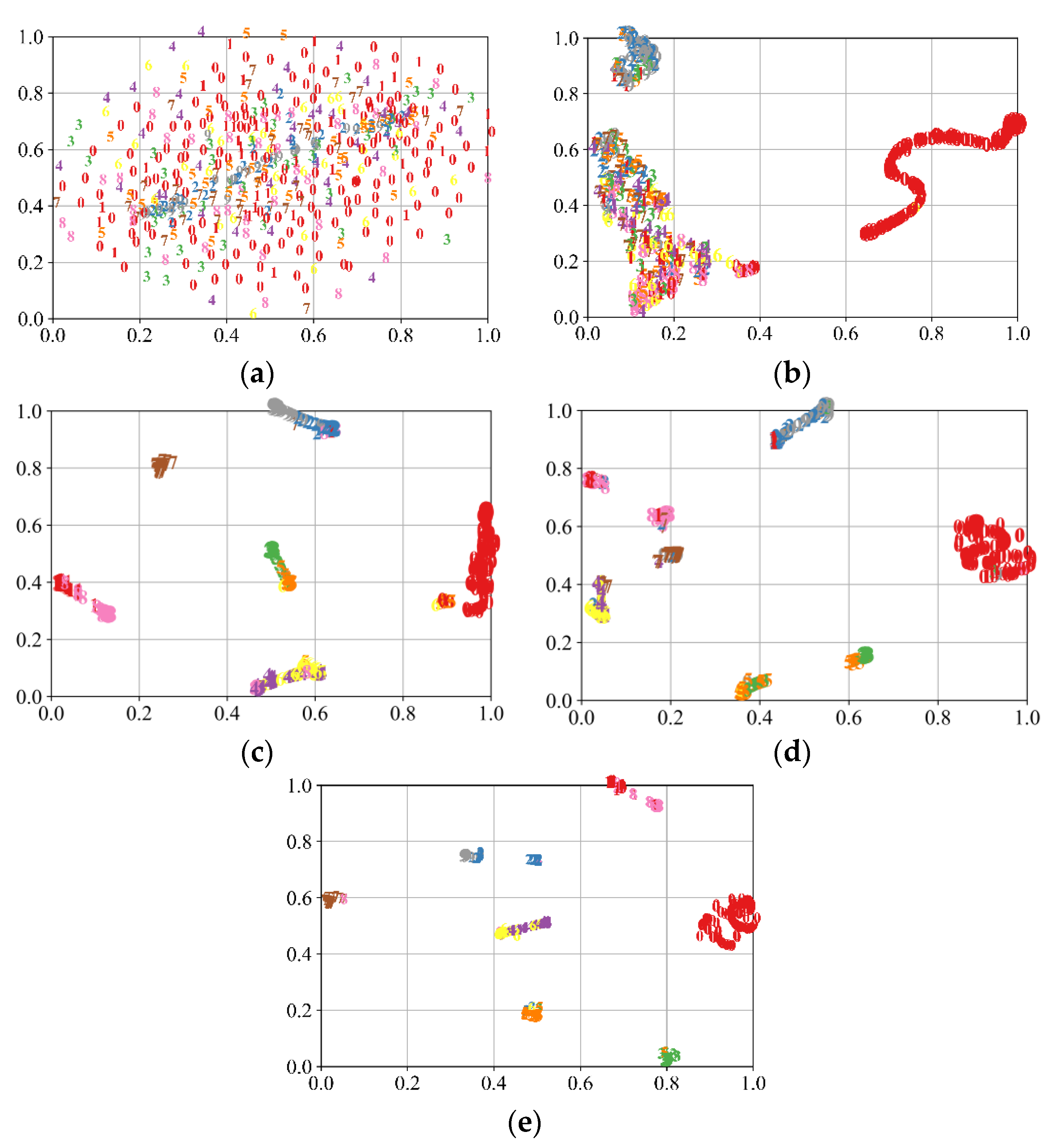
(3) Compared with the traditional CNN model, the ACGAN + DRSN model still has a stronger fault classification ability in the face of an unbalanced dataset containing noise under the variable working motor speed of the main bearing of the wind turbine.
The limitations of the methodological approach adopted are as follows:
(1) The research in this article is based on ACGAN. Many scholars have found that the original GAN has the problem of unstable training and poor ability to generate data.
(2) This model needs to train two models successively, which takes a longer time, so the training efficiency needs to be improved.
The simulation data of this experiment is still based on laboratory data and artificially added random noise. Considering the slight error of the wind turbine itself and changes in the operating environment, it is recommended that the wind turbine operation and maintenance manufacturers fully collect the different types of actual vibration data of the main bearing of the wind turbine when using the model proposed by this article. In addition, since the fault classification accuracy of the model decreases when the wind turbine runs at a new motor speed, the different working conditions of the wind turbine should be fully considered based on the model to improve its robustness of the model.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}