1. Introduction
There is a very close relationship between the kinematics of a moving particle and the differential geometry of the trajectory where any point particle of constant mass moving along a trajectory in the space has a position vector according to the moving frame for the trajectory. Displacement, velocity, and acceleration are all terms that we are all familiar with. We experience velocity when we move and acceleration when we change the velocity at which we move. When acceleration is rapidly changing, we feel jerk and snap. The terms jerk and snap mean very little to most people. Mathematically, the velocity, acceleration, jerk (jolt), and snap (jounce) are the first, second, third, and fourth derivatives of the position with respect to time, respectively. We can observe the effects of velocity, acceleration, and higher-order derivatives when driving a car. A more experienced driver accelerates smoothly, whereas a novice driver may produce a jerky ride, causing jerk and snap.
Jerk and snap can be observed in many areas. In physics and engineering, when transition and vibration occur, especially when this excitation causes multi-resonant modes of vibration. In mechanical engineering, when the cam-follower jumps off the camshaft in the automotive sense. In civil engineering, when switching between train tracks and roads suddenly. Jerk and snap have many applications in oscillators, manufacturing and motion control, see [
1,
2,
3].
A curve provided with the Frenet, Darboux, modified, Bishop, or quasi frame is called the
Frenet, Darboux, modified, Bishop, or
quasi curve, respectively. In most applications, the acceleration is expressed as the sum of its normal and tangential components. Siacci [
4] obtained the acceleration vector as the sum of its radial and tangential components. Despite Siacci’s theorem being very remarkable, his formulation of the theorem is inaccurate and his proof is burdensome. Therefore, Whittaker [
5] and Grossman [
6] presented a more modern geometrical proof of Siacci’s theorem in the plane. Casey [
7] presented a proof of Siacci’s theorem for Frenet curves in Euclidean 3-space
. Küçükarslan et al. [
8] studied Siacci’s theorem for curves in Finsler Manifold
. Özen et al. [
9] studied Siacci’s theorem for Darboux curves on regular surfaces in Euclidean 3-space
. Özen [
10] studied Siacci’s theorem for Frenet curves in Minkowski 3-space
. Résal [
11] obtained a resolution of the jerk vector for Frenet curves in Euclidean 3-space
. Özen et al. [
12] presented a new resolution of the jerk vector for Frenet curves in Euclidean 3-space
. Özen et al. [
13] studied resolutions of the acceleration and jerk vectors for modified curves in Euclidean 3-space
. Güner [
14] studied resolutions of the jerk vector for Bishop curves in Euclidean 3-space
. Tosun and Hızarcıoglu [
15] studied resolutions of the jerk vector for Darboux curves on regular surfaces in Euclidean 3-space
. For more details about the jerk and snap vectors, see [
1,
16,
17].
The moving frames play an essential role in studying curves and surfaces in different spaces, especially the quasi frame, which is more efficient and general than other frames (Frenet, Bishop). This frame characterized as well-defined at all points, its calculations are easy and its construction does not change if the curve parameterized by arc-length or not.
The purpose of this work is to study resolutions of the jerk and snap vectors of a point particle moving along a quasi curve in Euclidean 3-space
. This article is organized as follows: In
Section 2, we present background about the quasi frame along a unit speed curve in Euclidean 3-space
and its relation to the Frenet frame. In
Section 3, we obtain the resolution of the jerk and snap vectors of a point particle according to the quasi frame and provide an alternative resolution of the jerk and snap vectors along the tangential direction and two special radial directions. Moreover, the tangential and special radial components of the jerk and snap vectors for a quasi plane curve in Euclidean 3-space
are given as a corollary. In
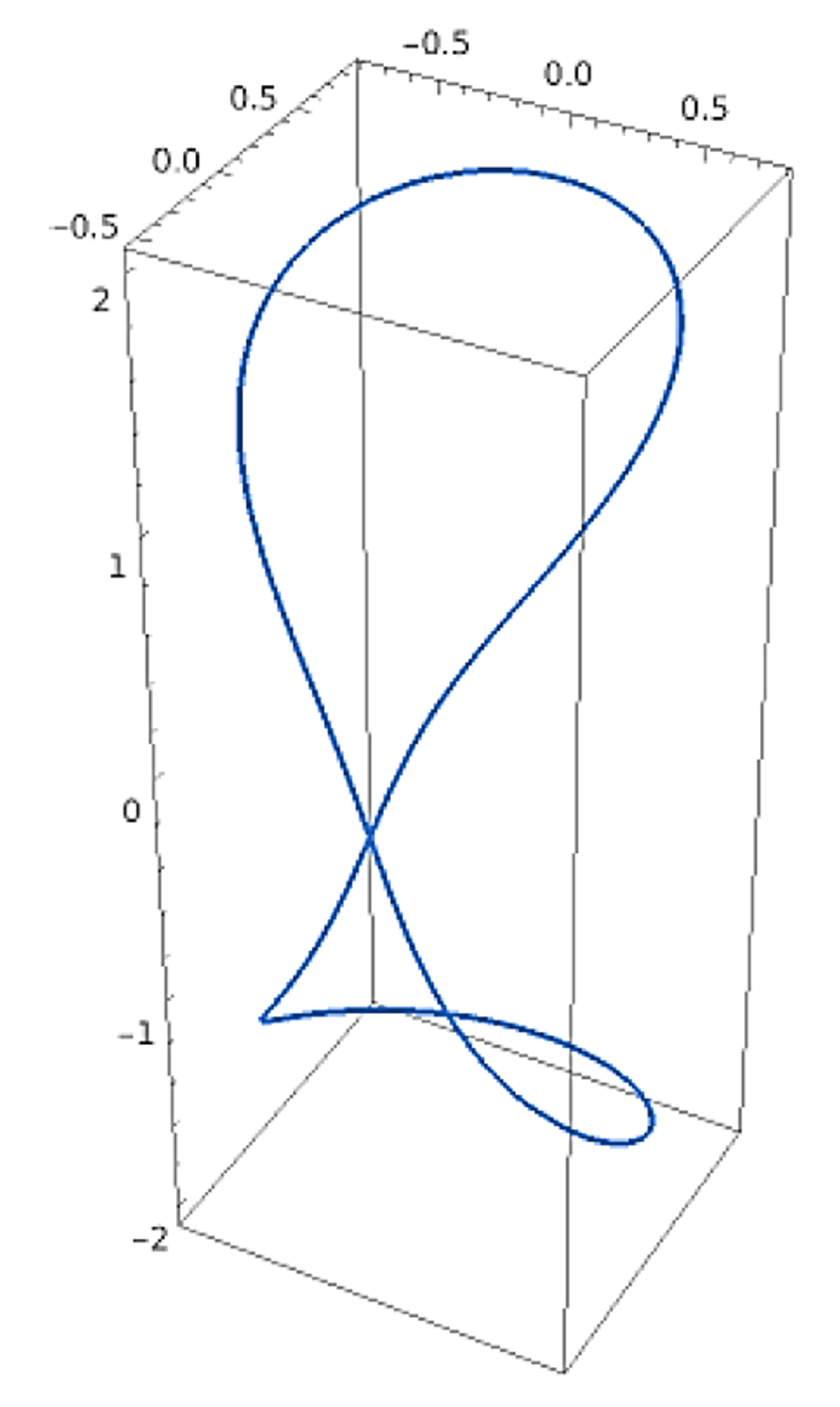
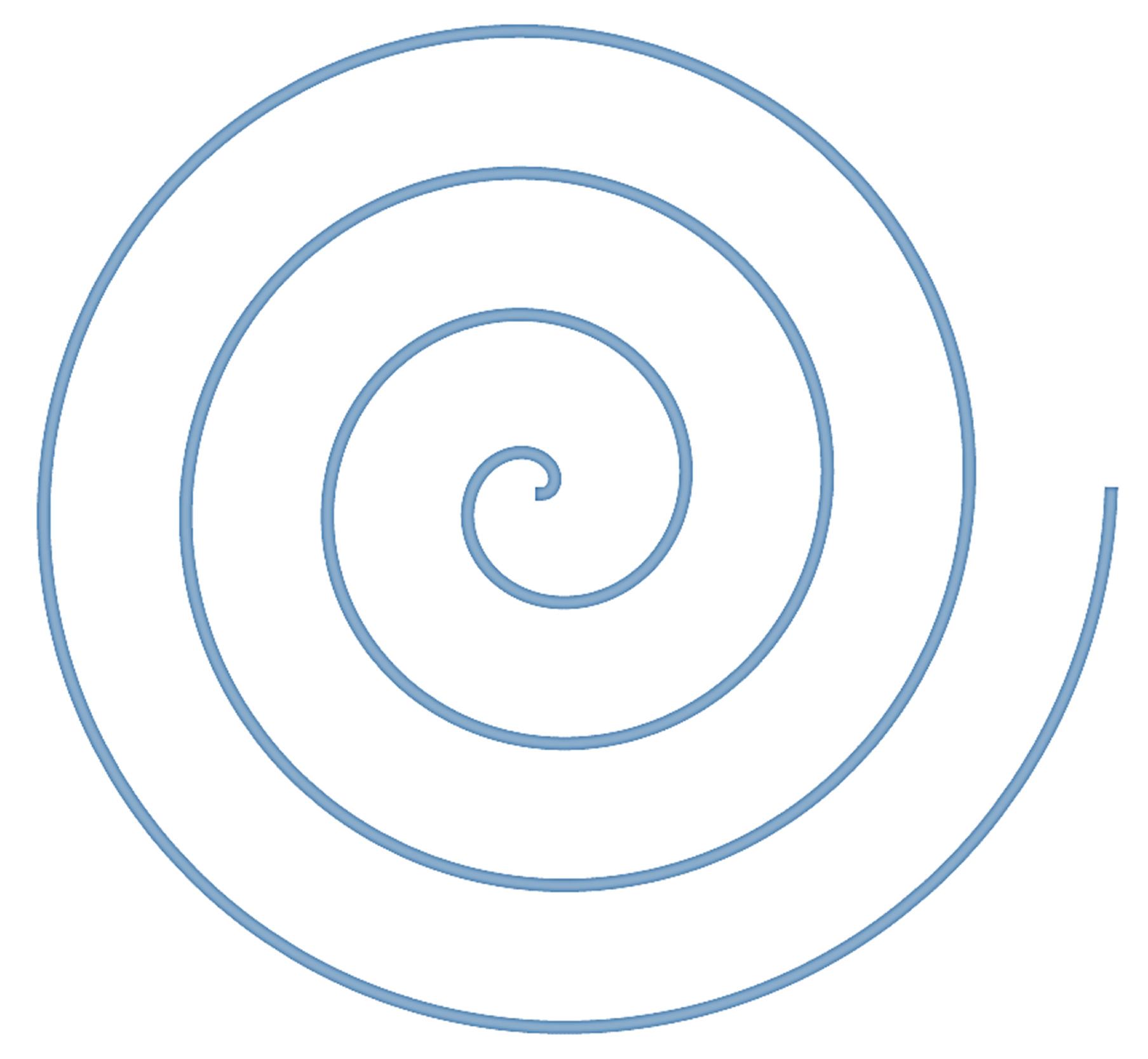
Section 4, we offer illustrative examples to show our results. Finally, in
Section 5, we conclude the article with a summary.
2. Preliminaries
In this section, we start with the basic concepts of this paper.
Let
be a Euclidean 3-space provided with the Cartesian metric
g given by
where
is a coordinate system of
. Let
and
be any two vectors in
. Then, we can define the following:
- -
The
Cartesian inner product of
P and
Q as
- -
The
Cartesian norm of
Q by
- -
The
Cartesian cross product of
P and
Q as
Definition 1. A differentiable curve in is termed a regular curve if for each s, while it is termed a unit speed curve or an arc-length parameterized curve if for each s.
Let
be a unit speed curve in
such that
for all
s. Then, we can define the following [
18,
19,
20]:
- -
The
Frenet orthonormal frame along the curve
as
where
,
and
are the unit tangent, Frenet-normal and Frenet-binormal vectors, respectively. Therefore, the
Frenet equations for the curve
are given by
where the functions
and
are Frenet-curvatures for the curve
and defined by
- -
The
quasi orthonormal frame along the curve
as
where
,
,
and
are the unit tangent, quasi-normal, quasi-binormal and projection vectors, respectively. The projection vector equals
or
or
.
- -
The
relation matrix between the quasi frame and Frenet frame along the curve
by
Thus, we have
where
is the Cartesian angle between the Frenet-normal
and quasi-normal
. By using (
2), (
5) and (
6), the
quasi equations for the curve
are given by
where the functions
are quasi-curvatures for the curve
and defined by
Remark 1. The quasi frame is singular if the vectors and are linearly dependent.
Remark 2. If we put in (7), then the quasi equations reduce to the Frenet equations. During the following sections of our paper, we shall need the following definitions and notation.
Definition 2. The first, second, third, and fourth time derivatives of the position vector are termed the velocity, acceleration, jerk (jolt), and snap (jounce) vectors, respectively.
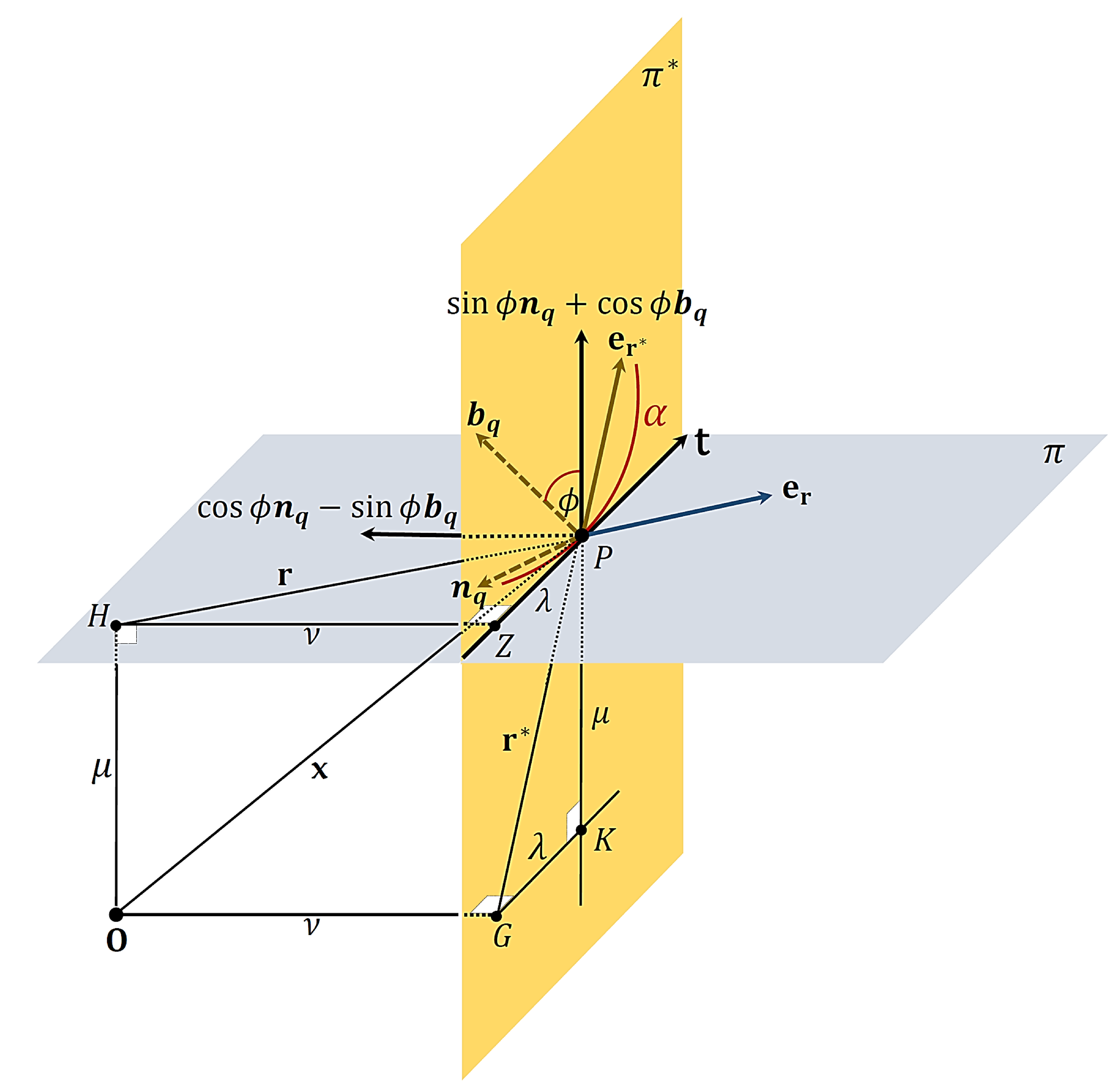
Notation 1. The osculating and rectifying planes are denoted by π and , respectively. The radial directions in the planes π and are denoted by and , respectively. The foots of perpendicular lines that are from a fixed origin to the planes π and are denoted by H and G, respectively. The unit vectors in directions and are denoted by and , respectively. The angular momentum vector of a point particle about a fixed origin is denoted by .
3. Main Results
In this section, we obtain the resolution of the jerk and snap vectors of a point particle along a quasi curve and provide an alternative resolution of the jerk and snap vectors along the tangential direction and two special radial directions that lie in the planes and .
Theorem 1. Assume that the point particle with constant mass m moves along an arc-length parameterized quasi curve in . Suppose that the arc-length s of the curve α coincides with time t. Then, we can state the following:
- -
The jerk vector of the point particle at time t is given aswhere
Here, , and are the tangential, quasi-normal and quasi-binormal components of the jerk, respectively.
- -
The snap vector of the point particle at time t is given bywhere
Here, , and are the tangential, quasi-normal and quasi-binormal components of the snap, respectively.
Proof. Let a point particle
move along an arc-length parameterized quasi curve
in the space
. Then, the point particle has a position vector according to the quasi frame. Let
be the position vector of
at time
t with respect to a fixed origin
in the space
. Through an assumption that “the arc-length of the curve coincides with the time”, the unit tangent vector
for the curve
at
is then given by
From (
7)–(
9) and (
12), we obtain the velocity
and acceleration
vectors of
at time
t according to the quasi frame as
and
respectively. From Definition 2, the jerk and snap vectors of the point particle
according to the quasi frame are expressed as in (
10) and (
11), respectively. The proof is complete. □
Theorem 2. Assume that the point particle with constant mass m moves along an arc-length parameterized quasi curve in . Suppose that the components of the vector never vanish. Then, we can state the following:
- -
The jerk vector of the point particle is given aswhere
Here, , and are the tangential and special radial components of the jerk. The special radial components and lie along the lines that pass by the point particle and the points H and G, respectively. The tangential component lies along the tangent line of the curve α at .
- -
The snap vector of the point particle is given bywhere
Here, , and are the tangential and special radial components of the snap. The special radial components and lie along the lines that pass by the point particle and the points H and G, respectively. The tangential component lies along the tangent line of the curve α at .
Proof. Let a point particle
move along an arc-length parameterized quasi curve
in the space
. Then, the point particle has a position vector in terms of the quasi frame. Assume that the position vector
of
is resolved as
where
We note that the vectors
,
and
are orthonormal. Let us define the vectors
and
as
that lie in the planes
and
to
at
, respectively. Then, we have
where
r and
are the Cartesian norms of
and
, respectively. (See
Figure 1). The jerk and snap vectors in (
10) and (
11) can be written as
and
respectively. It is well known that the vector
is given by
Thus, from (
13) and (
16), we obtain
Our goal is to resolve the jerk and snap vectors in (
20) and (
21) along the vectors
,
and
. To do that, let us write the vectors
and
in terms of
and
, respectively. By means of (
18), we can do this if and only if
and
. Through an assumption “the components of the vector
in (
22) never vanish”, we can guarantee that
and
. Thus, we find from (
18) that
We also find from (
19) that
and
. So, we can define the unit vectors
and
as
By substituting (
25) in (
20) and (
21), the jerk and snap vectors of the point particle
are expressed as in (
14) and (
15), respectively. The proof is complete. □
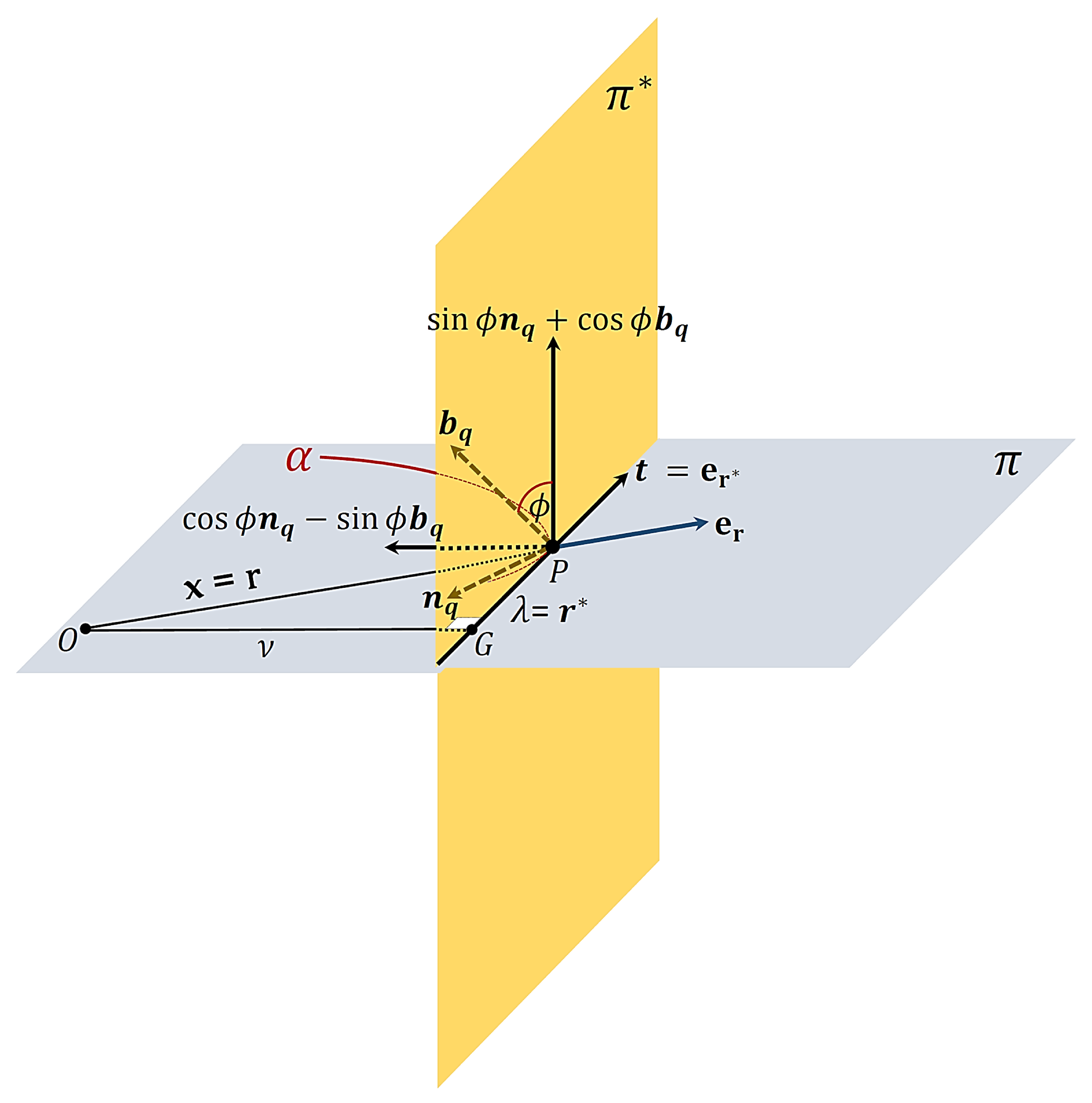
Corollary 1. In Euclidean 3-space, assume that the oriented quasi curve traced out by the point particle is limited to the plane π which does not necessarily contain the origin . Suppose that the component of the vector along the vector never vanishes. Then, we can state the following:
- -
The tangential and special radial components of the jerk vector become - -
The tangential and special radial components of the snap vector become
Proof. Let a point particle
move along an arc-length parameterized quasi curve
that lies in the plane
and choose a fixed origin
in the space
. Then, there are two cases. Firstly, we assume that the plane
does not contain
. Then,
. Through an assumption “the component of the vector
along the vector
in (
22) never vanishes”. Then
. We know that
in the planar motion. Then, the vector
is constant and perpendicular to the plane
. Therefore,
is a nonzero constant and
By means of (
7) and (
8), we obtain
which implies that
Consequently, we find from (
14) and (
15) that the tangential and special radial components of the jerk and snap vectors are expressed as in (
26) and (
27), respectively. Secondly, we assume that the plane
contains
. Then,
. As well,
and
. Thus, the quantities
and
vanish. While, the quantities
have indefiniteness
. Therefore, we will study this case when
. Then, it follows from (
18), (
19) and (
24) that
and
. (See
Figure 2).
Consequently, we can say that the vectors
and
are about to coincide with the zero vector at
. Thus, we find from (
14) and (
15) that the tangential and special radial components of the jerk and snap vectors are expressed as in (
26) and (
27), respectively. The proof is complete. □
Remark 3. If we put in the previous theorems and corollaries, we obtain resolutions of the jerk and snap vectors for a Frenet curve in Euclidean 3-space.





{kind=link}
{kind=link}
{kind=link}
{kind=link}



