
Inference for One-Shot Devices with Dependent k-Out-of-M Structured Components under Gamma Frailty


Abstract
:1. Introduction
2. One-Shot Device Test Data with Multiple Failure Modes
3. Exponential Lifetime Distributions with Gamma Frailty
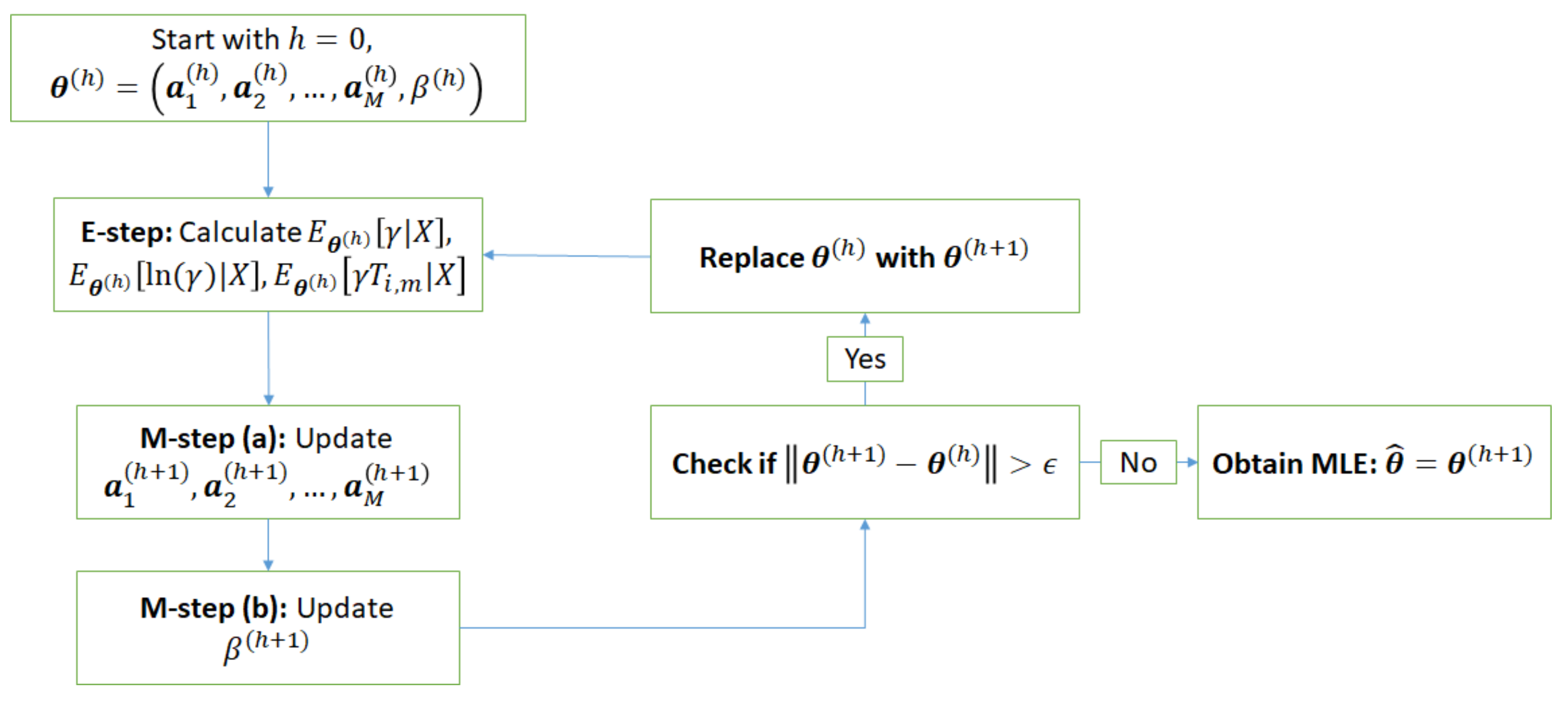
4. EM Algorithm for MLEs
- S1:
- S2:
- In the M-step, using the above conditional expectations and optimization tools:
- (a)
- (b)
- Set and update the estimate from (11) by solving for b such that is bounded between 0 and 0.5;
- S3:
- Repeat S1 and S2 until convergence is reached to the desired level of accuracy, with the current as the MLE of the model parameter, denoted by .
5. Interval Estimation
6. Simulation Study
6.1. Simulation by Using Copula
6.2. Simulation by Using Frailty
- S1:
- Generate the frailty from the gamma distribution with scale parameter and shape parameter
- S2:
- Generate and from the standard uniform distribution
- S3:
- Finally, compute
7. Illustrative Examples
7.1. Class-H Failure Mode Data
7.2. Mice Tumor Toxicological Data
7.3. Simulated Data
8. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ALTs | Accelerated life-tests |
| EM | Expectation–maximization |
| MLEs | Maximum likelihood estimates |
| CSALT | Constant-stress accelerated life-test |
| cdf | Cumulative distribution function |
| Probability density function | |
| E-step | Expectation step |
| M-step | Maximization step |
| ACI | Asymptotic confidence interval |
| TCI | Transformed confidence interval |
| RMSE | Root mean square error |
| CP | Coverage probability |
| AW | Average width |
| LRT | Likelihood ratio test |
Appendix A
Appendix B
References
- Bain, L.J.; Engelhardt, M. Reliability test plans for one-shot devices based on repeated samples. J. Qual. Technol. 1991, 23, 304–311. [Google Scholar] [CrossRef]
- Olwell, D.H.; Sorell, A.A. Warranty calculations for missiles with only current-status data, using Bayesian methods. In Proceedings of the Annual Reliability and Maintainability Symposium, International Symposium on Product Quality and Integrity (Cat. No. 01CH37179), Philadelphia, PA, USA, 22–25 January 2001; pp. 133–138. [Google Scholar]
- Newby, M. Monitoring and maintenance of spares and one shot devices. Reliab. Eng. Syst. Saf. 2008, 93, 588–594. [Google Scholar] [CrossRef]
- Fan, T.H.; Balakrishnan, N.; Chang, C.C. The Bayesian approach for highly reliable electro-explosive devices using one-shot device testing. J. Stat. Comput. Simul. 2009, 79, 1143–1154. [Google Scholar] [CrossRef]
- Zheng, J.; Li, Y.; Wang, J.; Shiju, E.; Li, X. Accelerated thermal aging of grease-based magnetorheological fluids and their lifetime prediction. Mater. Res. Express 2018, 5, 085702. [Google Scholar] [CrossRef]
- Nelson, W.B. Accelerated Testing: Statistical Models, Test Plans, and Data Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Meeker, W.Q.; Escobar, L.A. Statistical Methods for Reliability Data; John Wiley & Sons: New York, NY, USA, 2014. [Google Scholar]
- Balakrishnan, N.; Ling, M.H.; So, H.Y. Accelerated Life Testing of One-Shot Devices: Data Collection and Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]
- Kuo, W.; Zhang, W.; Zuo, M. A consecutive-k-out-of-n: G system: The mirror image of a consecutive-k-out-of-n: F system. IEEE Trans. Reliab. 1990, 39, 244–253. [Google Scholar] [CrossRef]
- Coit, D.W.; Chatwattanasiri, N.; Wattanapongsakorn, N.; Konak, A. Dynamic k-out-of-n system reliability with component partnership. Reliab. Eng. Syst. Saf. 2015, 138, 82–92. [Google Scholar] [CrossRef]
- Ling, X.; Wei, Y.; Si, S. Reliability optimization of k-out-of-n system with random selection of allocative components. Reliab. Eng. Syst. Saf. 2019, 186, 186–193. [Google Scholar] [CrossRef]
- Cheng, Y.; Elsayed, E.A. Reliability modeling and prediction of systems with mixture of units. IEEE Trans. Reliab. 2015, 65, 914–928. [Google Scholar] [CrossRef]
- Cheng, Y.; Elsayed, E.A. Optimal sequential ALT plans for systems with mixture of one-shot units. IEEE Trans. Reliab. 2017, 66, 997–1011. [Google Scholar] [CrossRef]
- Cheng, Y.; Elsayed, E.A. Reliability modeling of mixtures of one-shot units under thermal cyclic stresses. Reliab. Eng. Syst. Saf. 2017, 167, 58–66. [Google Scholar] [CrossRef]
- Cheng, Y.; Elsayed, E.A. Reliability modeling and optimization of operational use of one-shot units. Reliab. Eng. Syst. Saf. 2018, 176, 27–36. [Google Scholar] [CrossRef]
- Zhang, X.P.; Shang, J.Z.; Chen, X.; Zhang, C.H.; Wang, Y.S. Statistical inference of accelerated life testing with dependent competing failures based on copula theory. IEEE Trans. Reliab. 2014, 63, 764–780. [Google Scholar] [CrossRef]
- Cooke, R.; Paulsen, J. Concepts for measuring maintenance performance and methods for analysing competing failure modes. Reliab. Eng. Syst. Saf. 1997, 55, 135–141. [Google Scholar] [CrossRef]
- Bocchetti, D.; Giorgio, M.; Guida, M.; Pulcini, G. A competing risk model for the reliability of cylinder liners in marine diesel engines. Reliab. Eng. Syst. Saf. 2009, 94, 1299–1307. [Google Scholar] [CrossRef]
- Balakrishnan, N.; So, H.Y.; Ling, M.H. EM algorithm for one-shot device testing with competing risks under Weibull distribution. IEEE Trans. Reliab. 2016, 65, 973–991. [Google Scholar] [CrossRef]
- Kotz, S.; Balakrishnan, N.; Johnson, N.L. Continuous Multivariate Distributions, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2000. [Google Scholar]
- Sklar, A. Fonctions de repartition an dimensions et leurs marges. Publ. Inst. Stat. Univ. Paris 1959, 8, 229–231. [Google Scholar]
- Peng, W.; Li, Y.F.; Yang, Y.J.; Zhu, S.P.; Huang, H.Z. Bivariate analysis of incomplete degradation observations based on inverse Gaussian processes and copulas. IEEE Trans. Reliab. 2016, 65, 624–639. [Google Scholar] [CrossRef]
- Ling, M.H.; Chan, P.S.; Ng, H.K.T.; Balakrishnan, N. Copula models for one-shot device testing data with correlated failure modes. Commun. Stat.-Theory Methods 2021, 50, 3875–3888. [Google Scholar] [CrossRef]
- Liu, X. Planning of accelerated life tests with dependent failure modes based on a gamma frailty model. Technometrics 2012, 54, 398–409. [Google Scholar] [CrossRef]
- Tseng, S.T.; Hsu, N.J.; Lin, Y.C. Joint modeling of laboratory and field data with application to warranty prediction for highly reliable products. IIE Trans. 2016, 48, 710–719. [Google Scholar] [CrossRef]
- Nayak, T.K. Multivariate Lomax distribution: Properties and usefulness in reliability theory. J. Appl. Probab. 1987, 24, 170–177. [Google Scholar] [CrossRef]
- Johnson, N.L.; Kotz, S.; Balakrishnan, N. Continuous Univariate Distributions, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1994; Volume 1. [Google Scholar]
- Hanagal, D.D.; Pandey, A. Gamma shared frailty model based on reversed hazard rate. Commun. Stat.-Theory Methods 2016, 45, 2071–2088. [Google Scholar] [CrossRef]
- McLachlan, G.J.; Krishnan, T. The EM Algorithm and Extensions; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Louis, T.A. Finding the observed information matrix when using the EM algorithm. J. R. Stat. Soc. Ser. B 1982, 44, 226–233. [Google Scholar]
- Balakrishnan, N.; Ling, M.H. Gamma lifetimes and one-shot device testing analysis. Reliab. Eng. Syst. Saf. 2014, 126, 54–64. [Google Scholar] [CrossRef]
- Nelsen, R.B. An Introduction to Copulas; Springer: New York, NY, USA, 2007. [Google Scholar]
- Hofert, M.; Kojadinovic, I.; Mächler, M.; Yan, J. Elements of Copula Modeling with R; Springer: New York, NY, USA, 2019. [Google Scholar]
- Balakrishnan, N.; Pal, S. Lognormal lifetimes and likelihood-based inference for flexible cure rate models based on COM-Poisson family. Comput. Stat. Data Anal. 2013, 67, 41–67. [Google Scholar] [CrossRef]
- Lindsey, J.C.; Ryan, L.M. A three-state multiplicative model for rodent tumorigenicity experiments. J. R. Stat. Soc. Ser. C 1993, 42, 283–300. [Google Scholar] [CrossRef]
- Balakrishnan, N.; Ling, M.H. Best constant-stress accelerated life-test plans with multiple stress factors for one-shot device testing under a Weibull distribution. IEEE Trans. Reliab. 2014, 63, 944–952. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Test | Str. | Insp. | Number of Devices with the Set of Malfunctioned Components | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Grp. | Lvl. | Time | ∅ | |||||||
| 1 | ||||||||||
| 2 | ||||||||||
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| I | ||||||||||
| Dependence | Mean Lifetime | ||||
|---|---|---|---|---|---|
| Empirical (C) | 555.3440 | 232.2293 | 116.5498 | 48.1355 | |
| Empirical (F) | 556.7529 | 232.3021 | 116.5790 | 48.1404 | |
| Theoretical | 556.9071 | 231.8686 | 116.4822 | 48.0669 | |
| Empirical (C) | 711.6244 | 297.2964 | 149.4031 | 62.0487 | |
| Empirical (F) | 716.3950 | 298.7292 | 149.7724 | 61.9213 | |
| Theoretical | 716.0235 | 298.1167 | 149.7629 | 61.8003 | |
| Empirical (C) | 829.6855 | 345.3503 | 173.2962 | 71.9890 | |
| Empirical (F) | 835.3608 | 347.8029 | 174.7234 | 72.1004 | |
| Theoretical | 835.3608 | 347.8029 | 174.7234 | 72.1004 |
| Test Group | Stress Level | Inspection Time | Number of Test Devices |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 | |||
| 6 |
| K | Measure | −6 | 0.05 | −6.5 | 0.06 | −7 | 0.07 | −8 | 0.08 | 0.1 |
| 30 | BIAS | −0.067 | 0.001 | −0.063 | 0.001 | −0.056 | 0.001 | −0.164 | 0.003 | 0.022 |
| RMSE | 0.885 | 0.018 | 0.918 | 0.019 | 0.966 | 0.020 | 1.242 | 0.025 | 0.107 | |
| CP | 0.944 | 0.953 | 0.951 | 0.952 | 0.958 | 0.957 | 0.954 | 0.959 | 0.993 | |
| AW | 3.436 | 0.072 | 3.570 | 0.074 | 3.715 | 0.076 | 4.834 | 0.097 | 0.489 | |
| 50 | BIAS | −0.012 | 0.000 | −0.038 | 0.001 | −0.083 | 0.002 | −0.071 | 0.001 | 0.009 |
| RMSE | 0.682 | 0.014 | 0.723 | 0.015 | 0.738 | 0.015 | 0.954 | 0.019 | 0.083 | |
| CP | 0.946 | 0.947 | 0.946 | 0.947 | 0.957 | 0.961 | 0.949 | 0.948 | 0.989 | |
| AW | 2.629 | 0.055 | 2.742 | 0.057 | 2.870 | 0.059 | 3.692 | 0.074 | 0.372 | |
| 100 | BIAS | −0.016 | 0.000 | −0.033 | 0.001 | 0.001 | 0.000 | −0.031 | 0.000 | 0.005 |
| RMSE | 0.493 | 0.010 | 0.497 | 0.010 | 0.531 | 0.011 | 0.668 | 0.013 | 0.059 | |
| CP | 0.942 | 0.942 | 0.949 | 0.944 | 0.940 | 0.942 | 0.954 | 0.955 | 0.987 | |
| AW | 1.854 | 0.039 | 1.931 | 0.040 | 2.004 | 0.041 | 2.591 | 0.052 | 0.261 |
| K | Measure | −6 | 0.05 | −6.5 | 0.06 | −7 | 0.07 | −8 | 0.08 | 0.3 |
| 30 | BIAS | −0.052 | 0.001 | −0.104 | 0.002 | −0.102 | 0.002 | −0.074 | 0.001 | 0.011 |
| RMSE | 0.906 | 0.019 | 0.980 | 0.020 | 1.021 | 0.021 | 1.233 | 0.025 | 0.155 | |
| CP | 0.956 | 0.958 | 0.954 | 0.948 | 0.949 | 0.950 | 0.965 | 0.961 | 0.944 | |
| AW | 3.571 | 0.075 | 3.712 | 0.077 | 3.870 | 0.080 | 4.912 | 0.099 | 0.617 | |
| 50 | BIAS | −0.025 | 0.000 | −0.018 | 0.000 | −0.062 | 0.001 | −0.096 | 0.002 | 0.006 |
| RMSE | 0.694 | 0.014 | 0.739 | 0.015 | 0.779 | 0.016 | 1.005 | 0.020 | 0.126 | |
| CP | 0.960 | 0.963 | 0.955 | 0.962 | 0.948 | 0.947 | 0.945 | 0.944 | 0.928 | |
| AW | 2.749 | 0.058 | 2.853 | 0.059 | 2.975 | 0.061 | 3.796 | 0.077 | 0.476 | |
| 100 | BIAS | −0.013 | 0.000 | −0.002 | 0.000 | −0.037 | 0.001 | −0.030 | 0.000 | 0.002 |
| RMSE | 0.507 | 0.011 | 0.524 | 0.011 | 0.550 | 0.011 | 0.679 | 0.014 | 0.084 | |
| CP | 0.947 | 0.944 | 0.946 | 0.951 | 0.951 | 0.954 | 0.948 | 0.946 | 0.946 | |
| AW | 1.937 | 0.041 | 2.007 | 0.042 | 2.092 | 0.043 | 2.649 | 0.054 | 0.334 |
| K | Measure | −6 | 0.05 | −6.5 | 0.06 | −7 | 0.07 | −8 | 0.08 | 0.4 |
| 30 | BIAS | −0.150 | 0.003 | −0.033 | 0.001 | −0.106 | 0.002 | −0.185 | 0.003 | 0.000 |
| RMSE | 0.958 | 0.020 | 0.986 | 0.021 | 1.020 | 0.021 | 1.322 | 0.027 | 0.176 | |
| CP | 0.956 | 0.950 | 0.944 | 0.949 | 0.949 | 0.956 | 0.954 | 0.953 | 0.930 | |
| AW | 3.658 | 0.077 | 3.755 | 0.078 | 3.921 | 0.081 | 5.009 | 0.101 | 0.676 | |
| 50 | BIAS | −0.091 | 0.002 | −0.047 | 0.001 | −0.039 | 0.001 | −0.103 | 0.002 | 0.009 |
| RMSE | 0.730 | 0.015 | 0.743 | 0.015 | 0.736 | 0.015 | 1.005 | 0.020 | 0.136 | |
| CP | 0.953 | 0.952 | 0.951 | 0.950 | 0.960 | 0.958 | 0.956 | 0.951 | 0.946 | |
| AW | 2.821 | 0.059 | 2.911 | 0.061 | 3.021 | 0.062 | 3.833 | 0.077 | 0.529 | |
| 100 | BIAS | −0.007 | 0.000 | −0.035 | 0.001 | −0.033 | 0.001 | −0.026 | 0.000 | 0.004 |
| RMSE | 0.494 | 0.010 | 0.530 | 0.011 | 0.558 | 0.012 | 0.686 | 0.014 | 0.095 | |
| CP | 0.957 | 0.959 | 0.949 | 0.945 | 0.940 | 0.942 | 0.953 | 0.951 | 0.956 | |
| AW | 1.972 | 0.041 | 2.052 | 0.043 | 2.130 | 0.044 | 2.680 | 0.054 | 0.371 |
| K | 556 | 231 | 116 | 48.07 | 716 | 298 | 149 | 61.80 | |
| 30 | BIAS | 246 | 37.54 | 9.41 | 1.76 | 288 | 52.23 | 14.90 | 3.98 |
| RMSE | 634 | 94.33 | 37.96 | 14.72 | 1544 | 451 | 183 | 53.64 | |
| 50 | BIAS | 126 | 21.87 | 5.38 | 0.79 | 209 | 39.50 | 12.15 | 3.18 |
| RMSE | 319 | 68.93 | 29.75 | 11.72 | 547 | 152 | 71.18 | 27.81 | |
| 100 | BIAS | 57.05 | 9.36 | 2.13 | 0.23 | 81.73 | 16.07 | 4.54 | 1.00 |
| RMSE | 180 | 41.57 | 18.77 | 7.61 | 260 | 67.38 | 31.43 | 12.68 | |
| K | 835 | 347 | 174 | 72.10 | |||||
| 30 | BIAS | 530 | 107 | 36.20 | 10.83 | ||||
| RMSE | 4366 | 1058 | 500 | 201 | |||||
| 50 | BIAS | 297 | 65.54 | 24.64 | 8.19 | ||||
| RMSE | 896 | 240 | 113 | 45.50 | |||||
| 100 | BIAS | 110 | 25.74 | 8.92 | 2.64 | ||||
| RMSE | 332 | 98.25 | 46.90 | 19.05 | |||||
| ACI | TCI | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 556 | 231 | 116 | 48.07 | 556 | 231 | 116 | 48.07 | ||
| 30 | CP | 0.969 | 0.977 | 0.959 | 0.943 | 0.980 | 0.966 | 0.967 | 0.958 |
| AW | 1903 | 349 | 148 | 59.15 | 2664 | 376 | 158 | 62.90 | |
| 50 | CP | 0.952 | 0.96 | 0.946 | 0.941 | 0.962 | 0.961 | 0.961 | 0.955 |
| AW | 1038 | 237 | 107 | 43.64 | 1169 | 247 | 111 | 45.14 | |
| 100 | CP | 0.967 | 0.969 | 0.962 | 0.950 | 0.963 | 0.960 | 0.961 | 0.954 |
| AW | 617 | 156 | 73.27 | 30.11 | 647 | 159 | 74.44 | 30.60 | |
| 716 | 298 | 149 | 61.80 | 716 | 298 | 149 | 61.80 | ||
| 30 | CP | 0.954 | 0.944 | 0.916 | 0.902 | 0.981 | 0.968 | 0.956 | 0.940 |
| AW | 2339 | 557 | 242 | 96.09 | 3053 | 624 | 268 | 106 | |
| 50 | CP | 0.941 | 0.941 | 0.92 | 0.907 | 0.960 | 0.960 | 0.952 | 0.942 |
| AW | 1454 | 379 | 173 | 70.08 | 1664 | 402 | 183 | 74.03 | |
| 100 | CP | 0.957 | 0.957 | 0.947 | 0.948 | 0.960 | 0.965 | 0.951 | 0.951 |
| AW | 905 | 249 | 118 | 48.54 | 958 | 256 | 121 | 49.79 | |
| 835 | 347 | 174 | 72.10 | 835 | 347 | 174 | 72.10 | ||
| 30 | CP | 0.954 | 0.949 | 0.931 | 0.908 | 0.972 | 0.966 | 0.963 | 0.954 |
| AW | 3124 | 689 | 301 | 118 | 4335 | 785 | 339 | 133 | |
| 50 | CP | 0.943 | 0.942 | 0.923 | 0.906 | 0.965 | 0.966 | 0.954 | 0.955 |
| AW | 1822 | 485 | 223 | 90.08 | 2128 | 523 | 239 | 96.51 | |
| 100 | CP | 0.938 | 0.942 | 0.924 | 0.922 | 0.964 | 0.964 | 0.957 | 0.950 |
| AW | 1084 | 323 | 154 | 63.15 | 1155 | 335 | 159 | 65.28 | |
| LRT | ACI | |||||||
|---|---|---|---|---|---|---|---|---|
| K | ||||||||
| 30 | 0.259 | 0.419 | 0.836 | 0.909 | 0.030 | 0.161 | 0.661 | 0.805 |
| 50 | 0.100 | 0.343 | 0.918 | 0.986 | 0.031 | 0.225 | 0.862 | 0.969 |
| 100 | 0.061 | 0.491 | 0.996 | 1.000 | 0.039 | 0.433 | 0.991 | 1.000 |
| i | ||||||
|---|---|---|---|---|---|---|
| 1 | 374 | 8000 | 0 | 1 | 0 | 4 |
| 2 | 374 | 10,000 | 1 | 4 | 0 | 0 |
| 3 | 428 | 2500 | 1 | 2 | 0 | 2 |
| 4 | 428 | 3000 | 2 | 0 | 0 | 3 |
| 5 | 464 | 1600 | 3 | 1 | 1 | 0 |
| 6 | 464 | 1800 | 0 | 4 | 0 | 1 |
| 7 | 500 | 800 | 2 | 0 | 2 | 1 |
| 8 | 500 | 1500 | 1 | 1 | 3 | 0 |
| MLE | −4.9897 | −0.0058 | −16.4365 | 0.0183 | 0.5 |
| LCI | −13.9192 | −0.0249 | −21.6720 | 0.0065 | 0 |
| UCI | 3.9397 | 0.0131 | −11.2010 | 0.0301 | 0.5 |
| i | (in ppm) | (in Months) | ||||
|---|---|---|---|---|---|---|
| 1 | 0 | 12 | 23 | 0 | 3 | 3 |
| 2 | 0 | 18 | 156 | 0 | 9 | 1 |
| 3 | 0 | 33 | 134 | 1 | 49 | 8 |
| 4 | 150 | 12 | 22 | 0 | 7 | 6 |
| 5 | 150 | 18 | 73 | 35 | 4 | 12 |
| 6 | 150 | 33 | 64 | 38 | 3 | 20 |
| Outcome | X | Death Time | Tumor Onset Time |
|---|---|---|---|
| Sacrifice without Tumor | ∅ | Right censored | Right censored |
| Sacrifice with Tumor | Right censored | Left censored | |
| Death without Tumor | Left censored | Right censored | |
| Death with Tumor | Left censored | Left censored |
| Bladder Tumor | Death | ||||
|---|---|---|---|---|---|
| MLE | −6.5873 | 0.0193 | −4.7037 | 0.5 | |
| 90% CI | (−7.0487, −6.1259) | (0.0160, 0.0227) | (−4.9134, −4.4940) | (−0.0020, 0.0021) | (0.0553, 0.5) |
| 95% CI | (−7.1370, −6.0376) | (0.0153, 0.0234) | (−4.9536, −4.4538) | (−0.0024, 0.0025) | (0, 0.5) |
| (1,35,10) | (2,35,20) | (3,45,10) | (4,45,20) | (5,55,10) | (6,55,20) | |
|---|---|---|---|---|---|---|
| 69 | 41 | 45 | 28 | 38 | 11 | |
| 8 | 8 | 12 | 9 | 11 | 11 | |
| 6 | 11 | 13 | 10 | 8 | 5 | |
| 6 | 12 | 11 | 6 | 8 | 7 | |
| 4 | 4 | 8 | 7 | 3 | 5 | |
| 0 | 4 | 0 | 11 | 5 | 8 | |
| 4 | 2 | 2 | 6 | 6 | 3 | |
| 1 | 3 | 3 | 3 | 3 | 3 | |
| 1 | 5 | 4 | 6 | 3 | 9 | |
| 0 | 0 | 0 | 0 | 3 | 0 | |
| 0 | 5 | 1 | 5 | 5 | 8 | |
| 0 | 2 | 0 | 1 | 4 | 9 | |
| 0 | 1 | 0 | 1 | 1 | 0 | |
| 1 | 2 | 0 | 3 | 0 | 6 | |
| 0 | 0 | 1 | 1 | 2 | 5 | |
| 0 | 0 | 0 | 3 | 0 | 10 | |
| EM | Optim | EM | Optim | EM | Optim | |
|---|---|---|---|---|---|---|
| −6.0460 | −4.6923 | −6.0460 | −5.5797 | −6.0460 | −5.9529 | |
| 0.0501 | 0.0210 | 0.0501 | 0.0408 | 0.0501 | 0.0460 | |
| −6.2758 | −6.3717 | −6.2758 | −6.3401 | −6.2758 | −5.8591 | |
| 0.0521 | 0.0551 | 0.0521 | 0.0539 | 0.0521 | 0.0524 | |
| −6.0921 | −7.7454 | −6.0921 | −7.9611 | −6.0921 | −7.8888 | |
| 0.0521 | 0.0858 | 0.0521 | 0.0905 | 0.0521 | 0.0905 | |
| −6.7194 | −6.9059 | −6.7194 | −7.7412 | −6.7194 | −7.6397 | |
| 0.0533 | 0.0566 | 0.0533 | 0.0742 | 0.0533 | 0.0719 | |
| 0.2557 | 0.5172 | 0.2557 | 0.3345 | 0.2558 | 0.6046 | |
| Computational Time (sec) | 18.47 | 32.22 | 18.66 | 32.50 | 17.82 | 32.64 |
| Model Parameters | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| MLE | −6.0459 | 0.0500 | −6.2757 | 0.0521 | −6.0921 | 0.0521 | −6.7194 | 0.0532 | 0.2557 |
| LCI | −7.0163 | 0.0298 | −7.3003 | 0.0308 | −7.0502 | 0.0321 | −7.9199 | 0.0284 | 0.0931 |
| UCI | −5.0756 | 0.0703 | −5.2512 | 0.0734 | −5.1340 | 0.0721 | −5.5189 | 0.0780 | 0.4183 |
| Mean lifetimes of k−out−of−4 structured devices at | |||||||||
| MLE | 437.053 | 213.861 | 112.827 | 47.808 | |||||
| ACI | (261.958, 612.188) | (138.808, 288.934) | (73.690, 151.975) | (31.229, 64.392) | |||||
| TCI | (292.788, 652.463) | (150.565, 303.793) | (79.758, 159.623) | (33.799, 67.631) | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ling, M.-H.; Balakrishnan, N.; Yu, C.; So, H.Y. Inference for One-Shot Devices with Dependent k-Out-of-M Structured Components under Gamma Frailty. Mathematics 2021, 9, 3032. https://doi.org/10.3390/math9233032
Ling M-H, Balakrishnan N, Yu C, So HY. Inference for One-Shot Devices with Dependent k-Out-of-M Structured Components under Gamma Frailty. Mathematics. 2021; 9(23):3032. https://doi.org/10.3390/math9233032
Chicago/Turabian StyleLing, Man-Ho, Narayanaswamy Balakrishnan, Chenxi Yu, and Hon Yiu So. 2021. "Inference for One-Shot Devices with Dependent k-Out-of-M Structured Components under Gamma Frailty" Mathematics 9, no. 23: 3032. https://doi.org/10.3390/math9233032