
Contrast-Independent, Partially-Explicit Time Discretizations for Nonlinear Multiscale Problems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Additional degrees of freedom are needed for dynamic problems, in general, to handle missing information.
- We note that restrictive time steps scale with the coarse mesh size, and thus, are much coarser.
2. Problem Setting
- The second variational derivatives and satisfywhere and are independent of v.
- The second variational derivatives and are bounded. That is,where and are independent on .
3. Discretization
4. Partially Explicit Scheme with Space Splitting
Energy Stability
5. Discussions
5.1. Case
5.2. Case
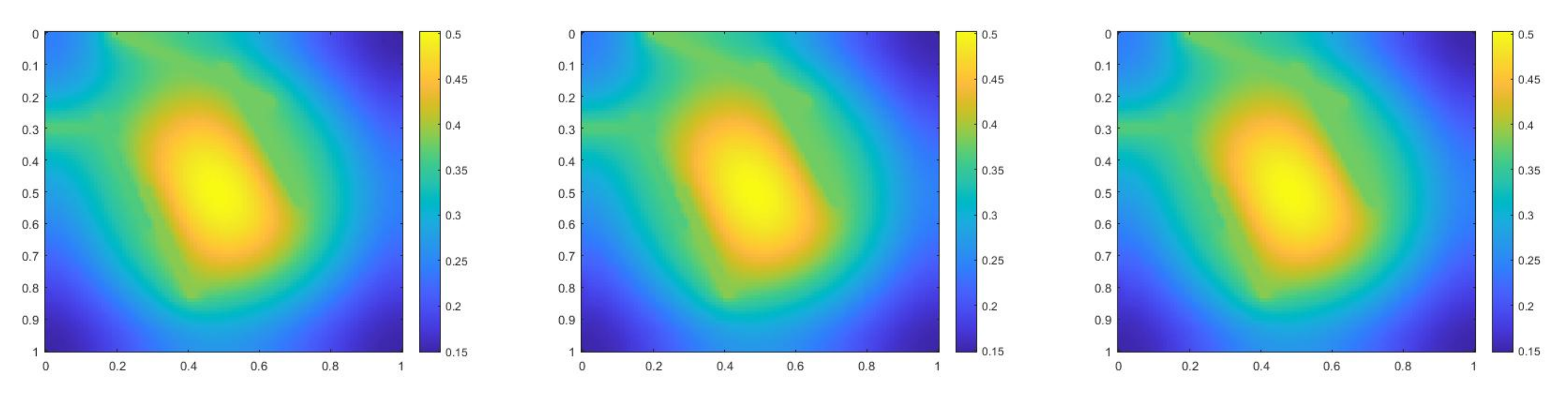
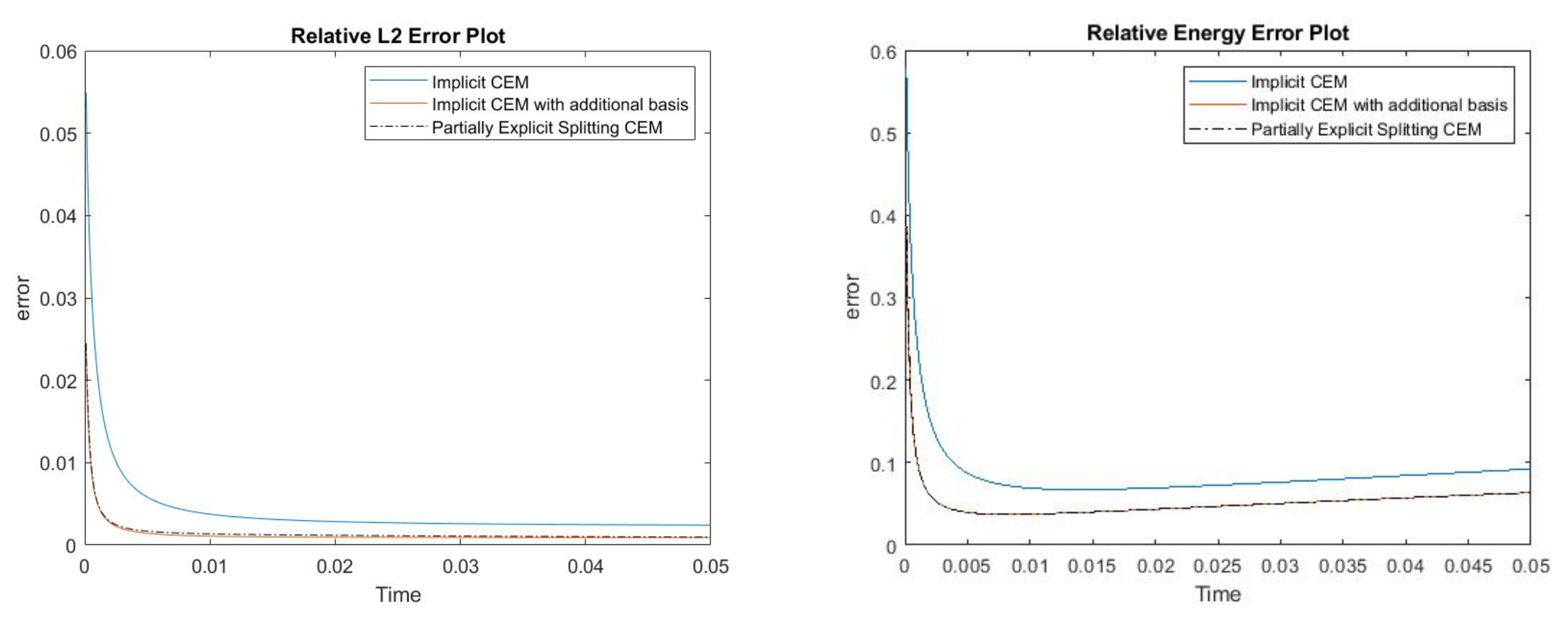
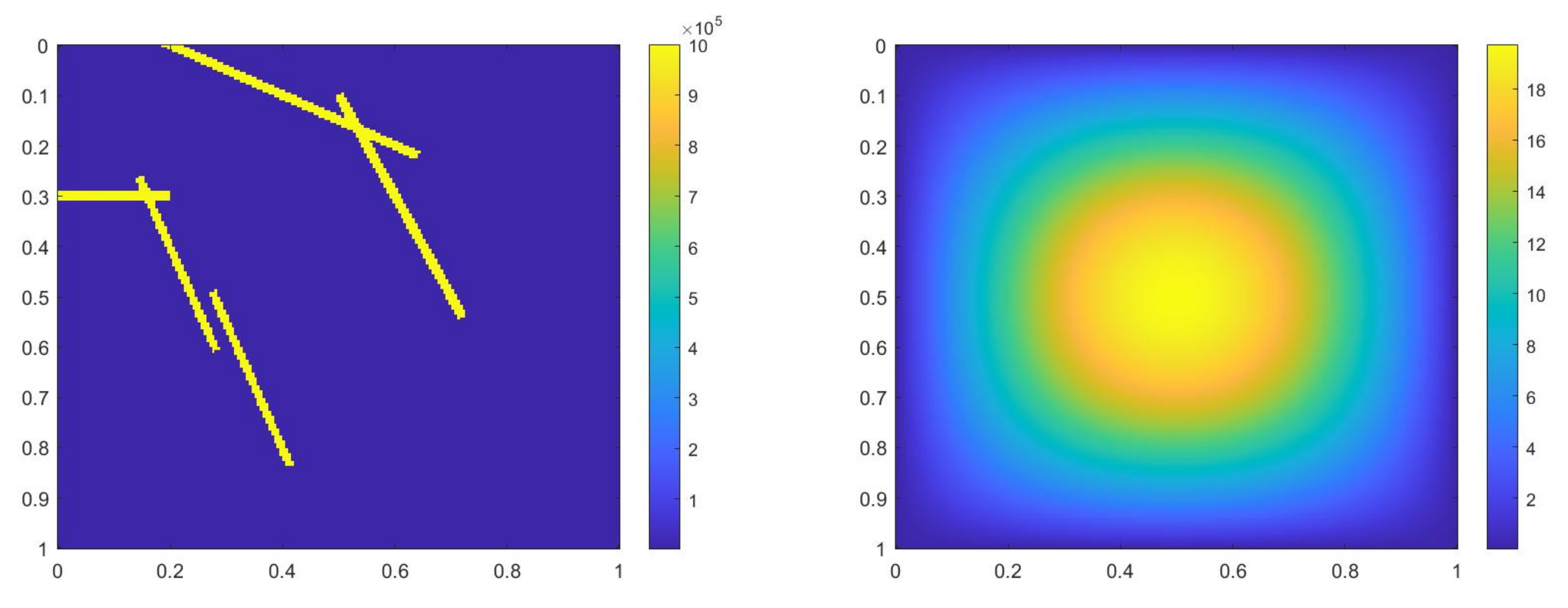
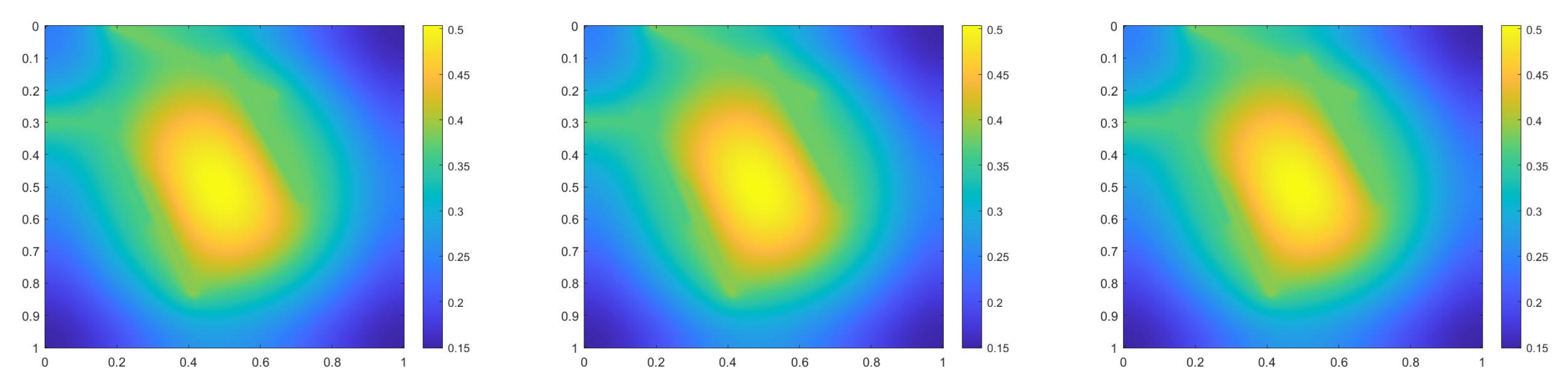
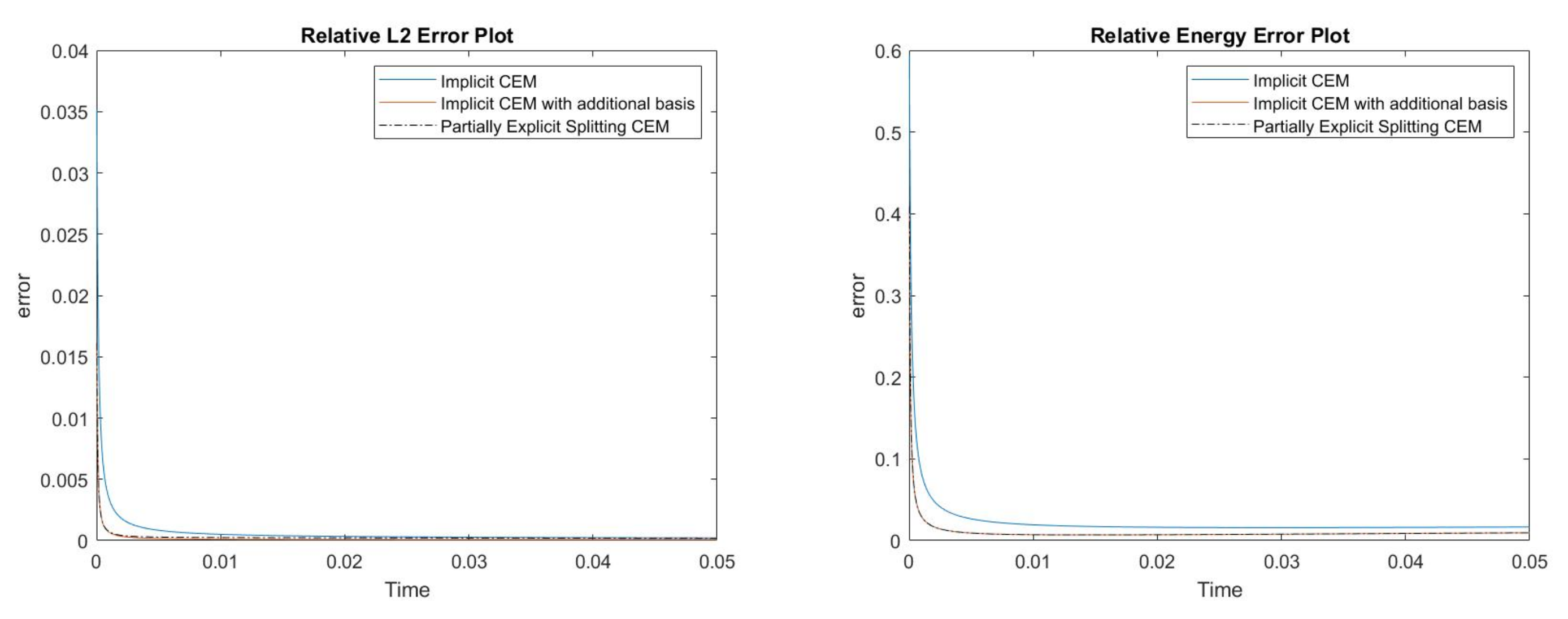
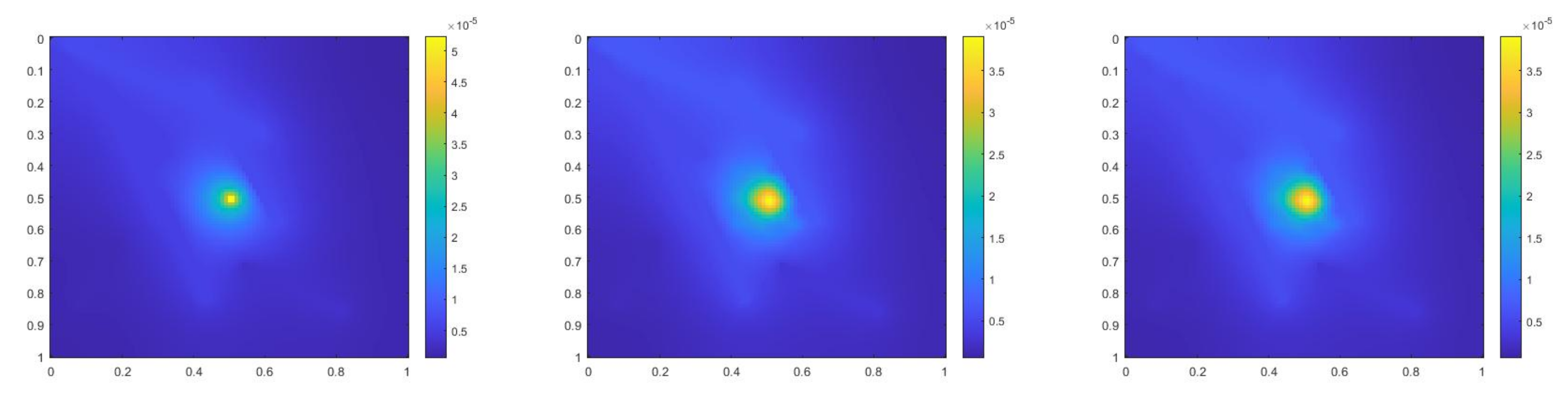
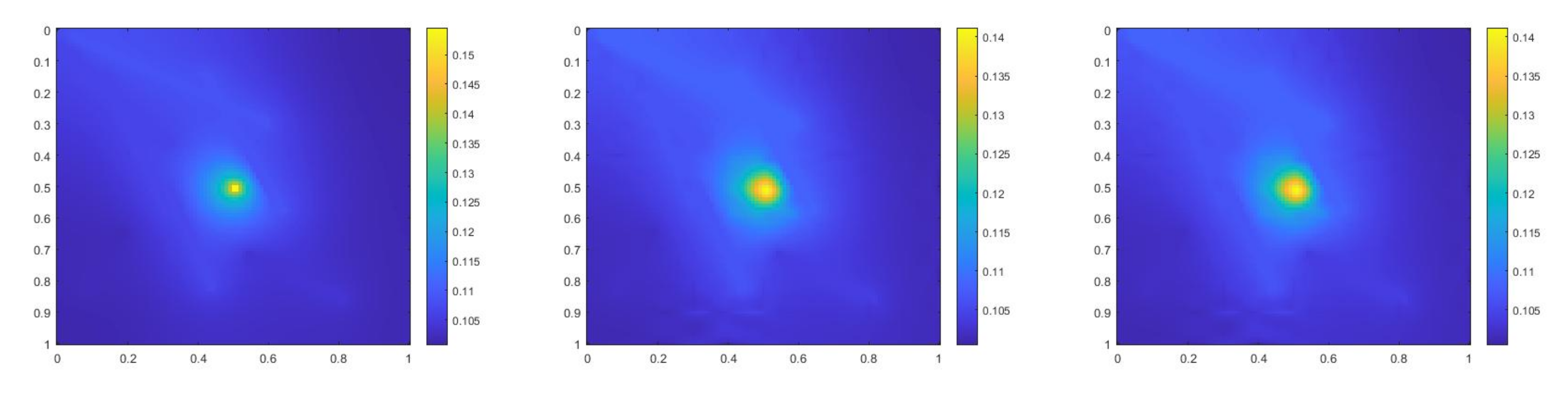
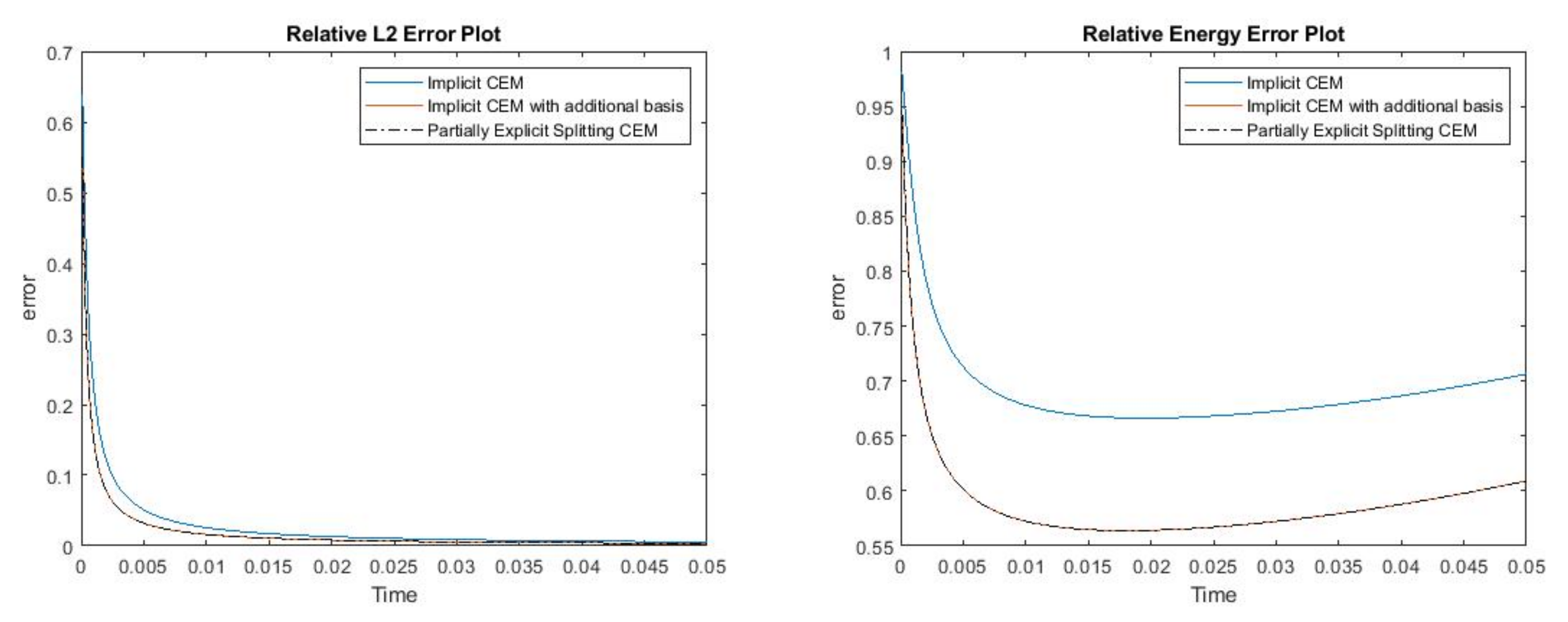
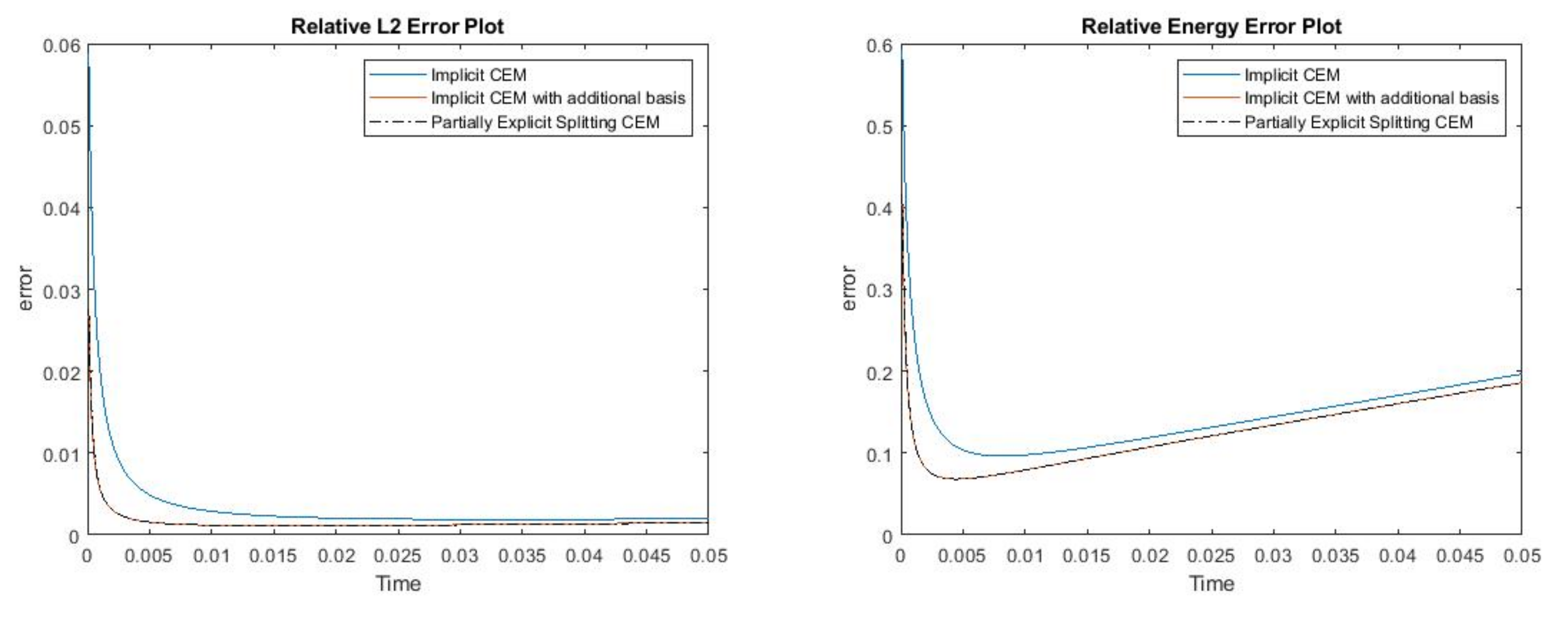
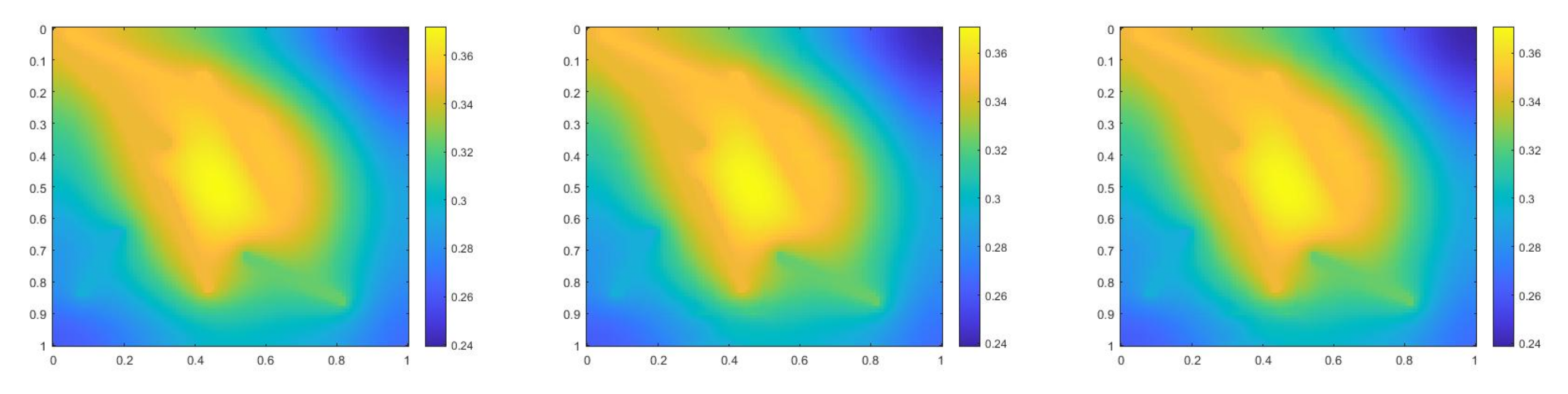
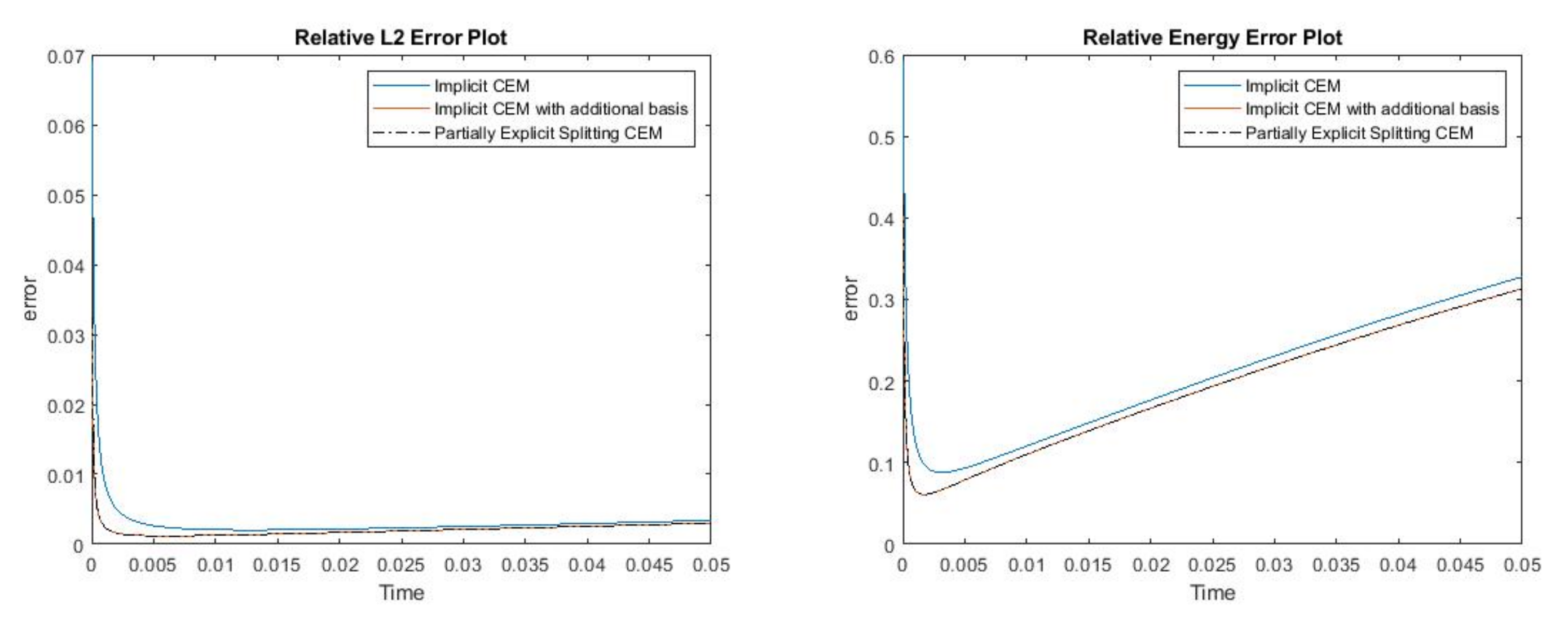
6. Numerical Results
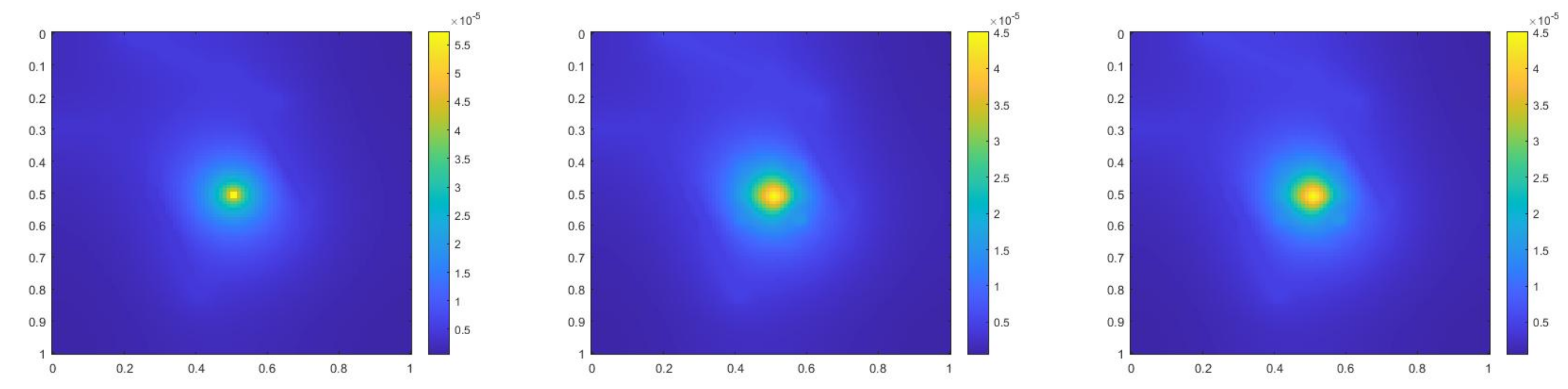
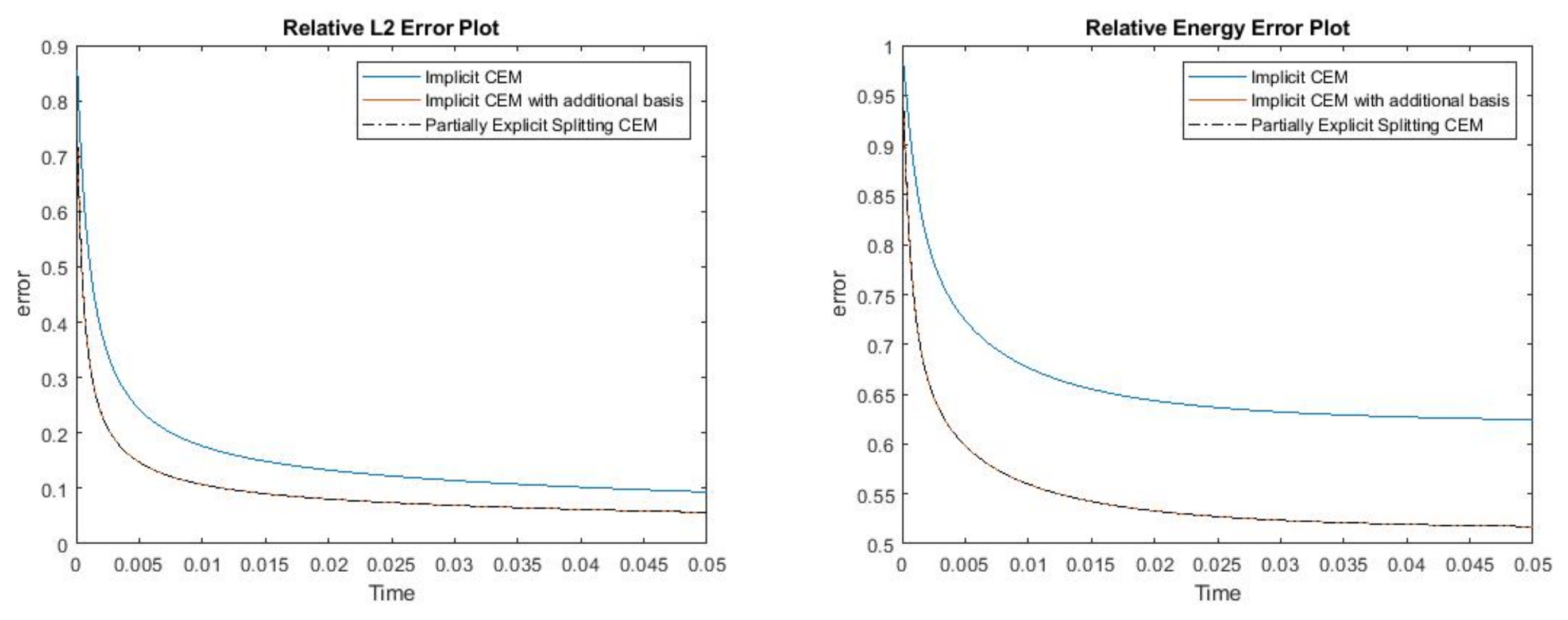
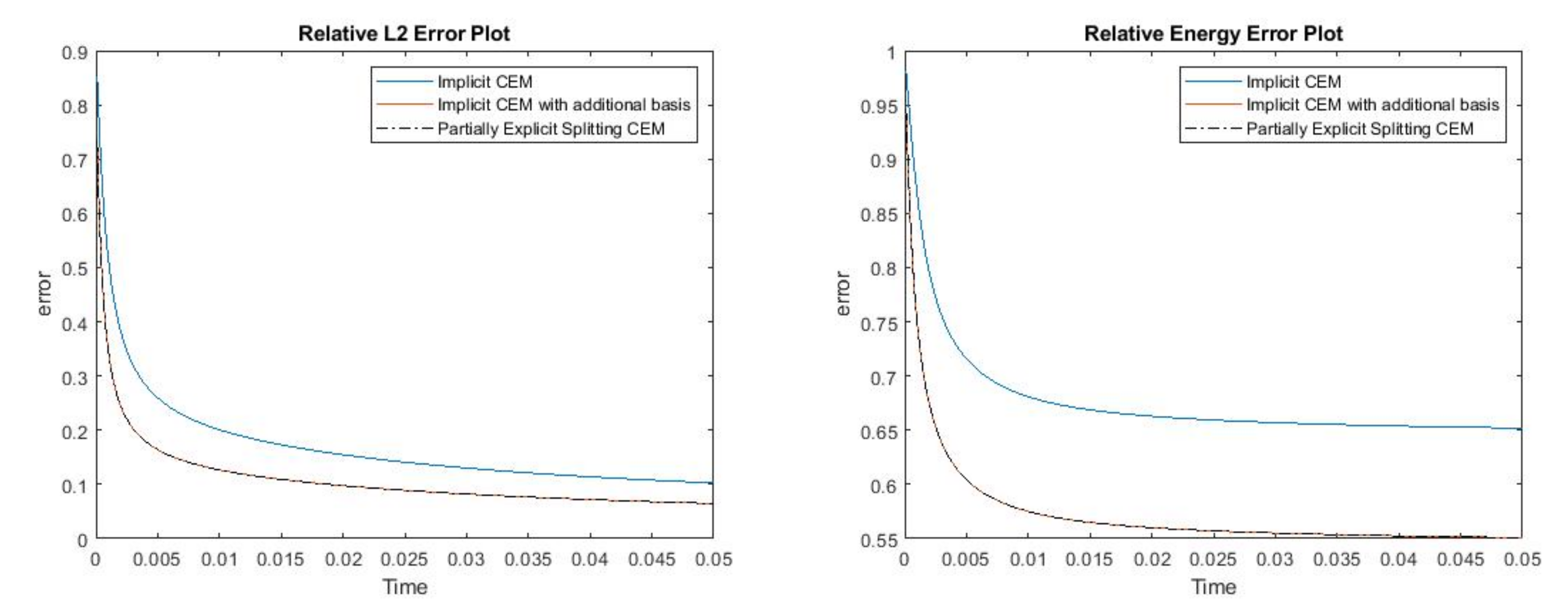
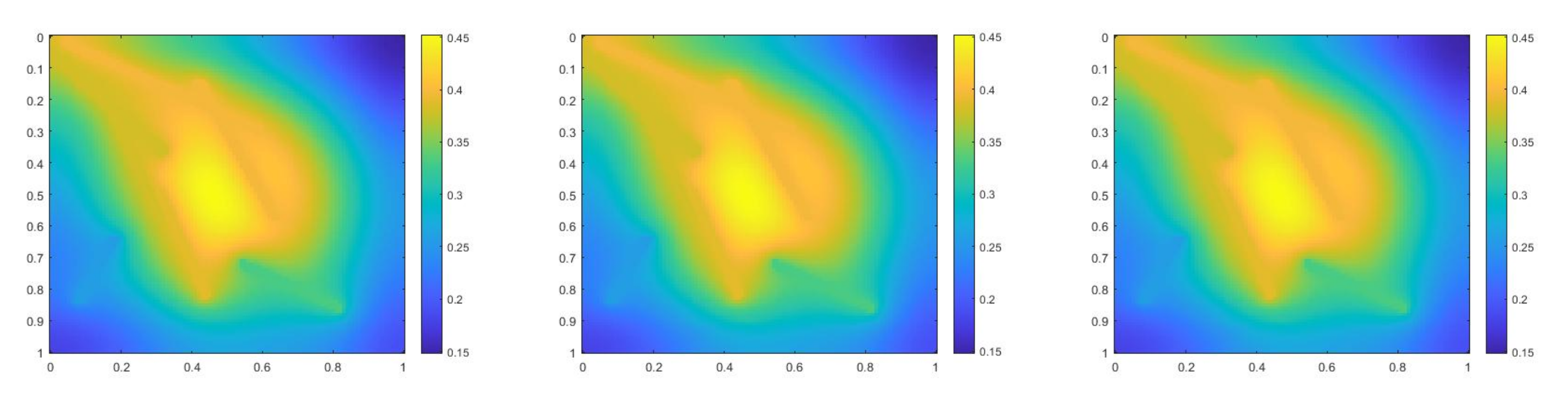
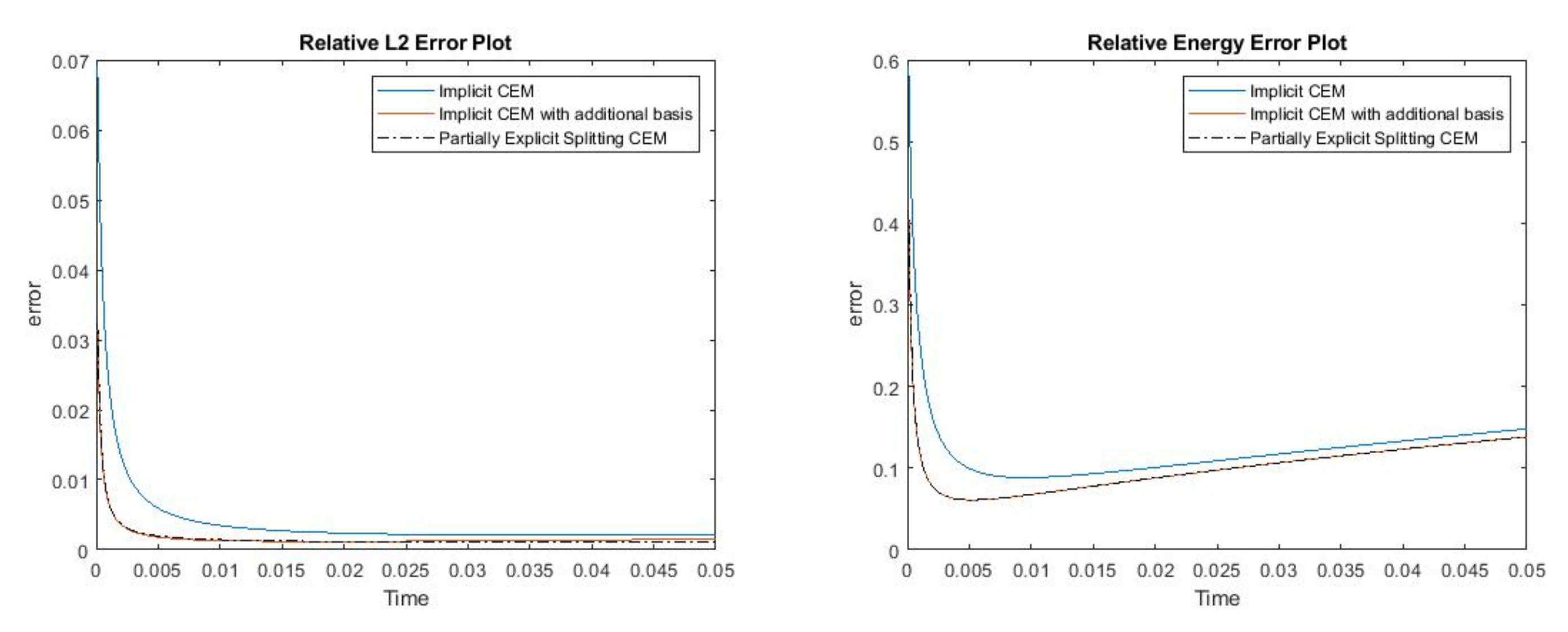
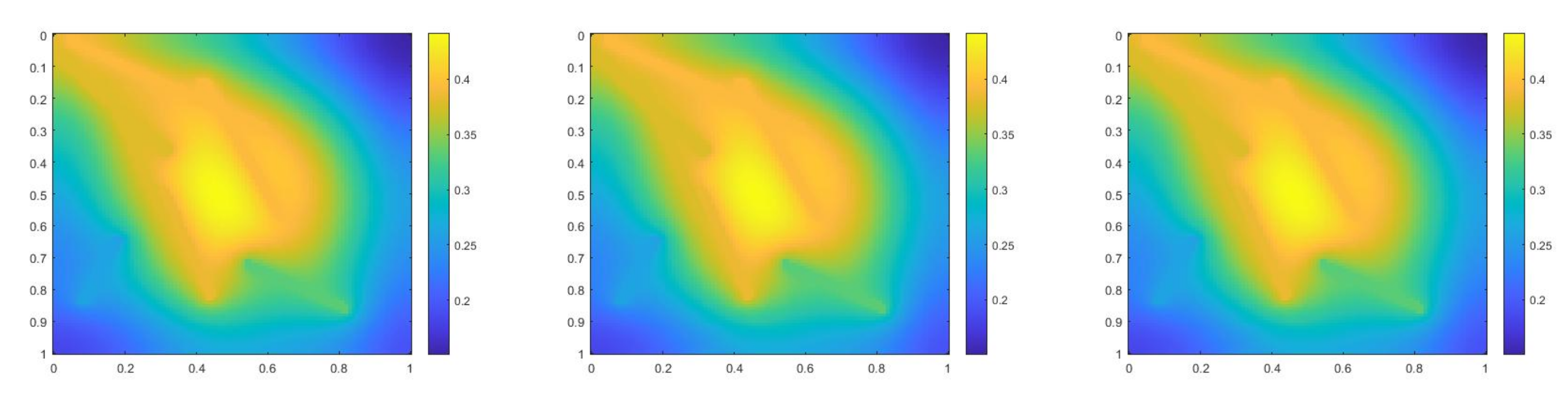
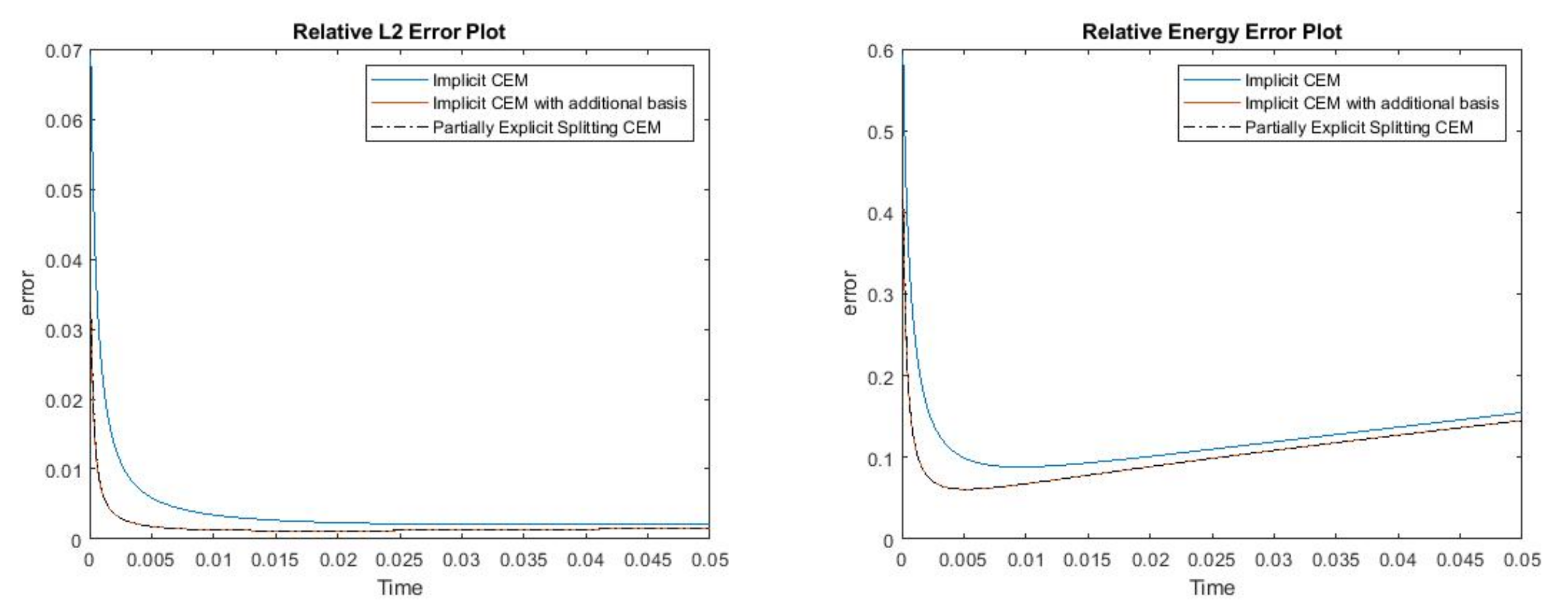
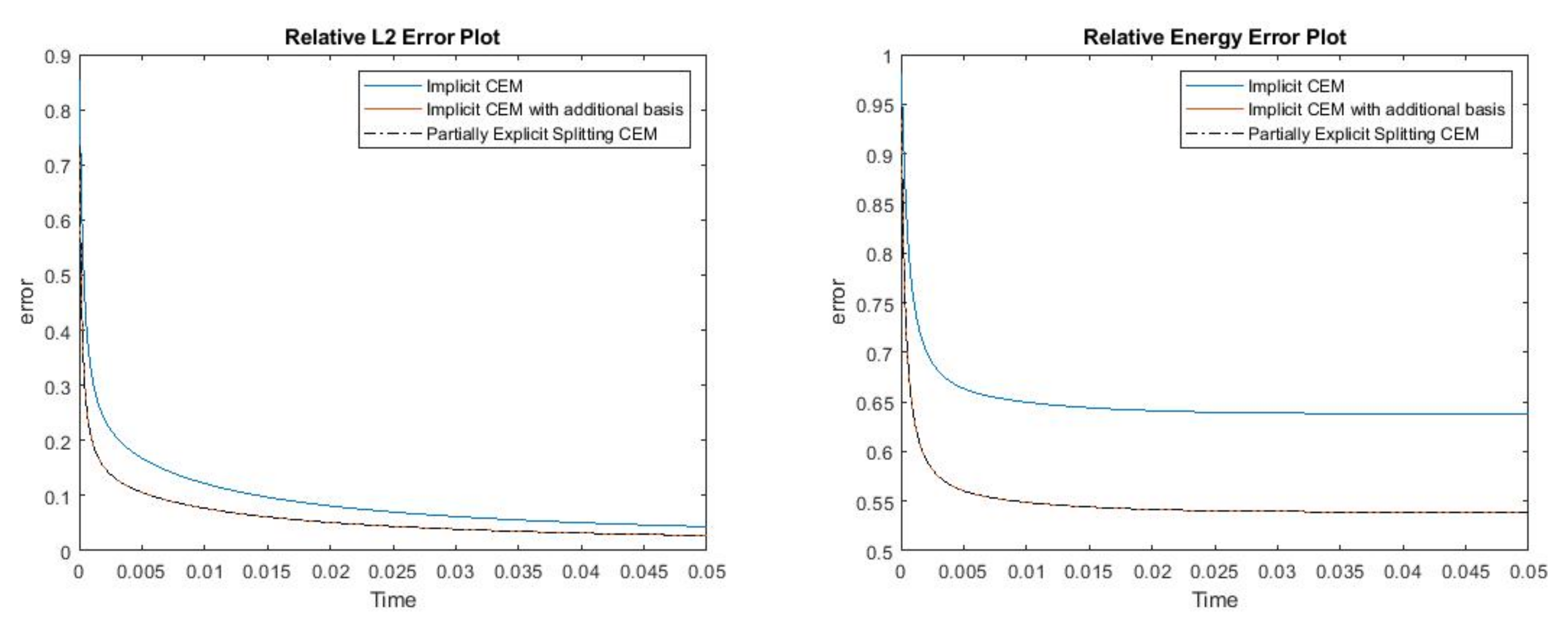
- First, we used implicit CEM to compute the solution without additional degrees of freedom (called “Implicit CEM” in our graphs).
- Secondly, we computed the solution with additional degrees of freedom using implicit CEM (called “Implicit CEM with additional basis” in our graphs).
- Finally, we computed the solution with additional degrees of freedom using our proposed partially explicit approach (called “Partially Explicit Splitting CEM” in our graphs).
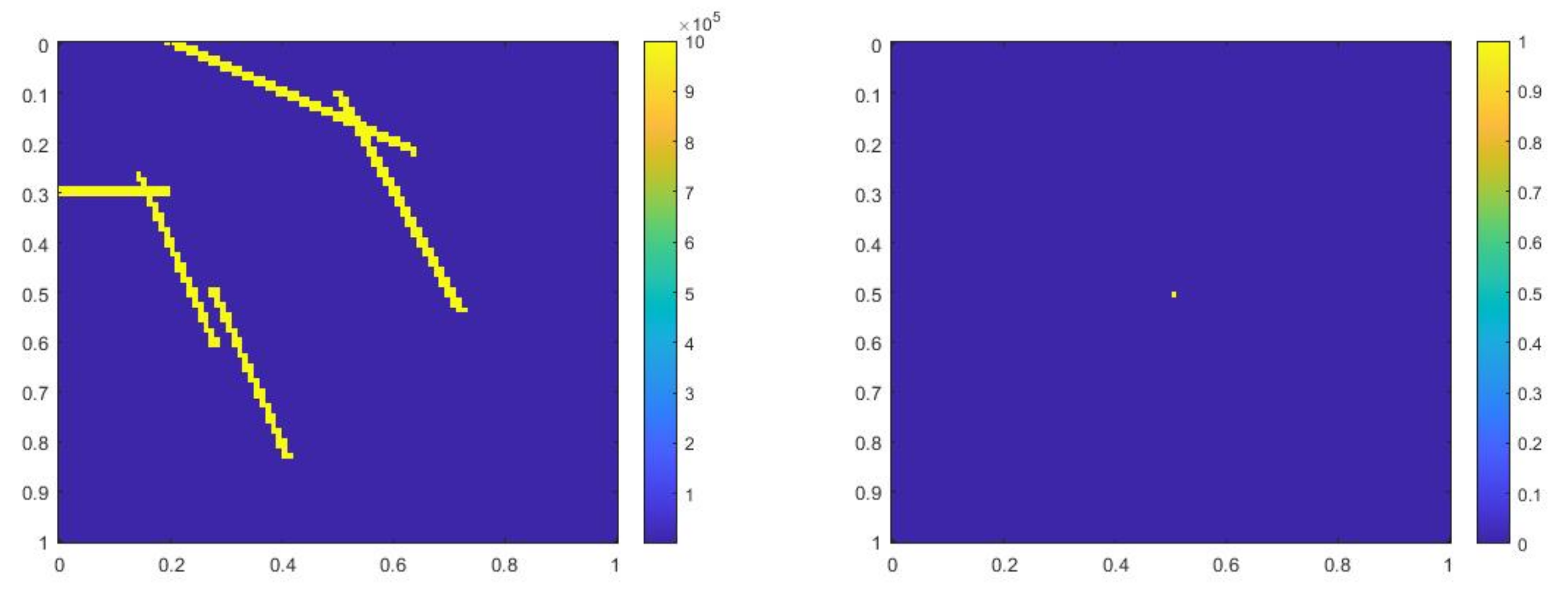
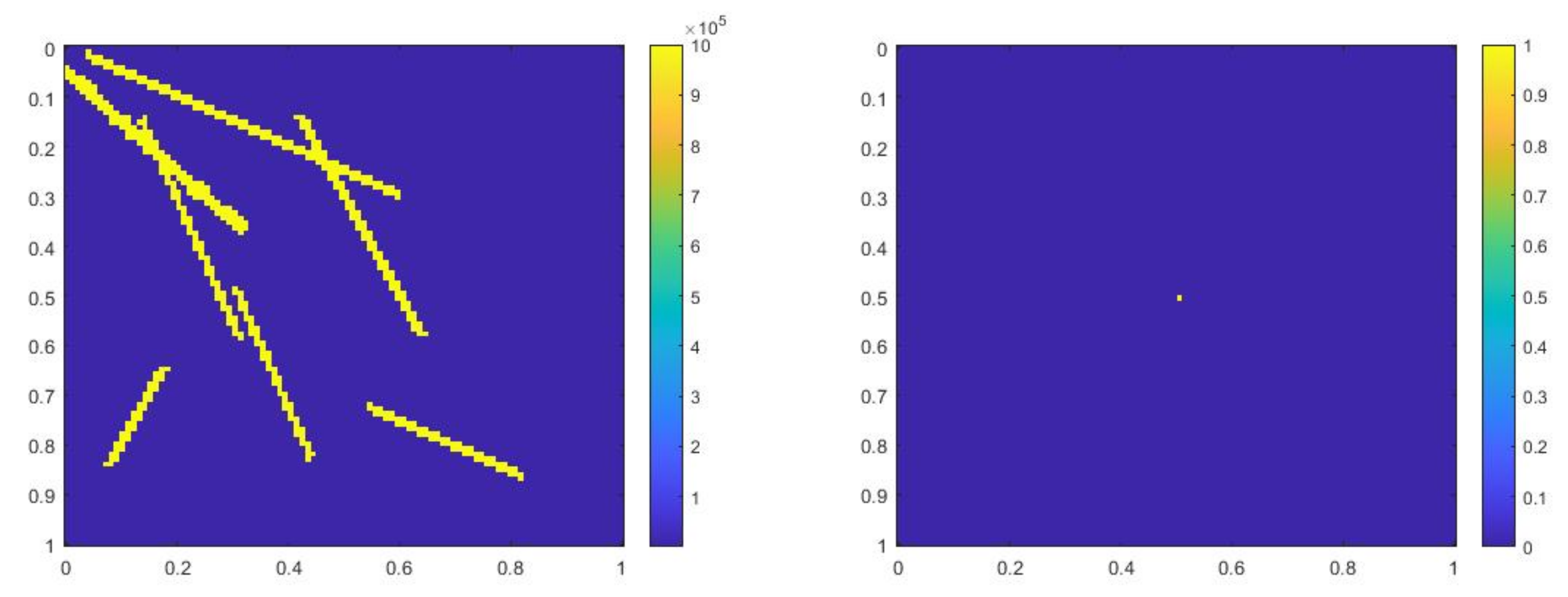
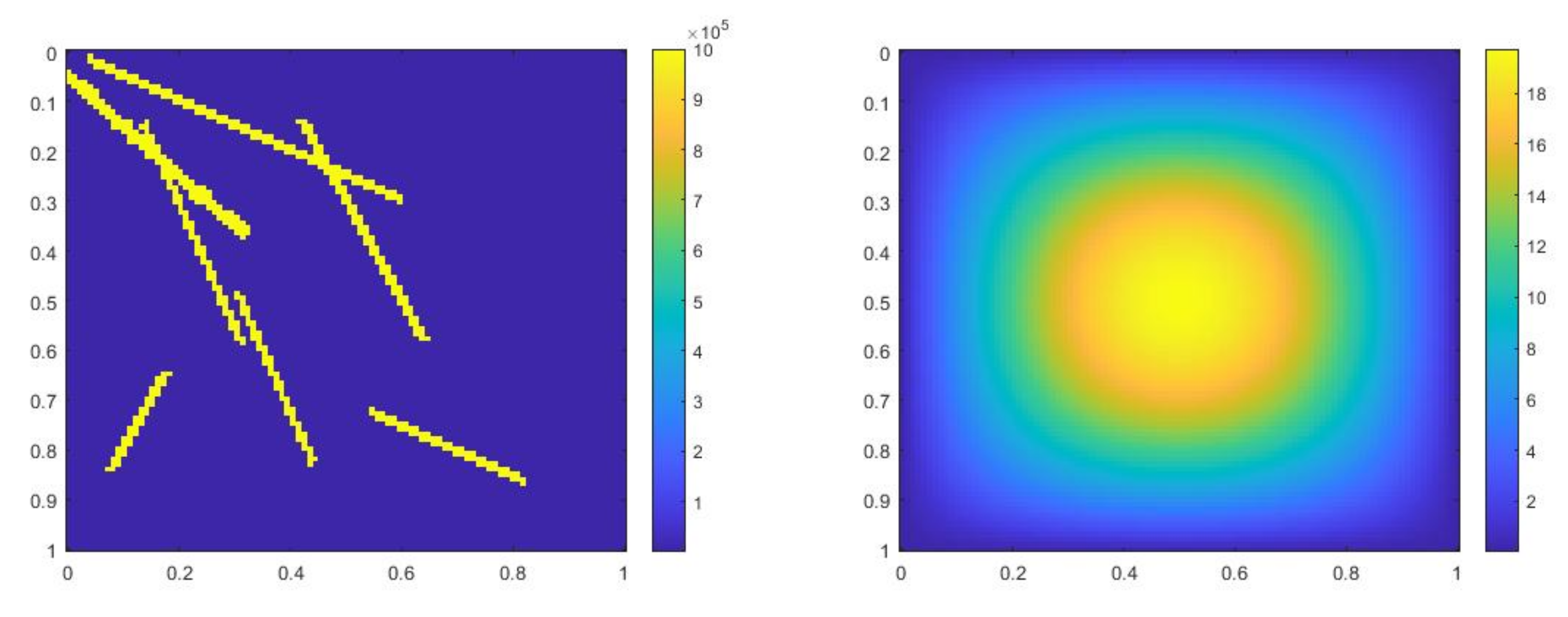
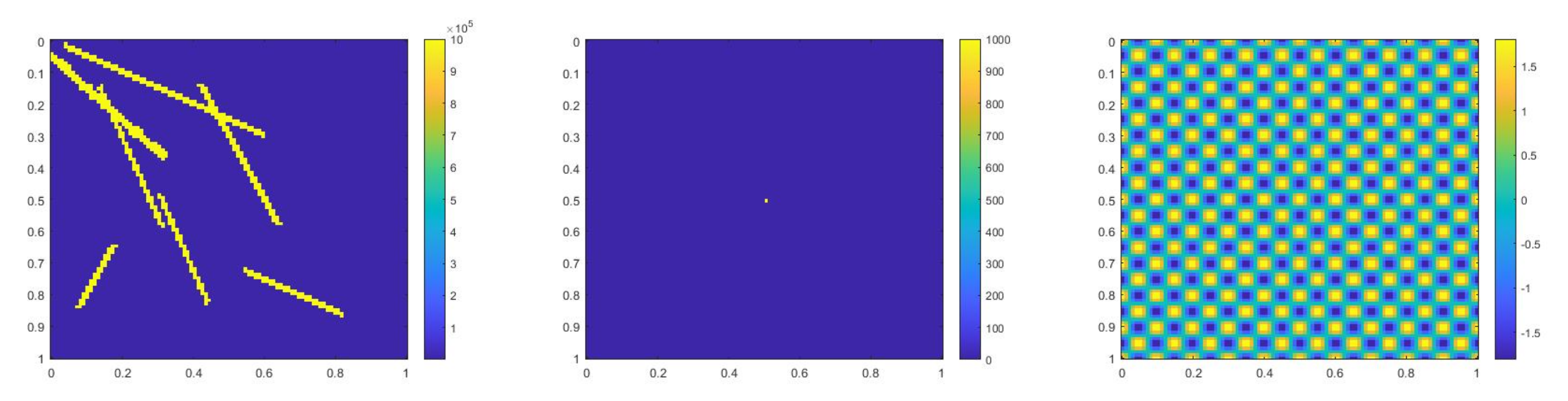
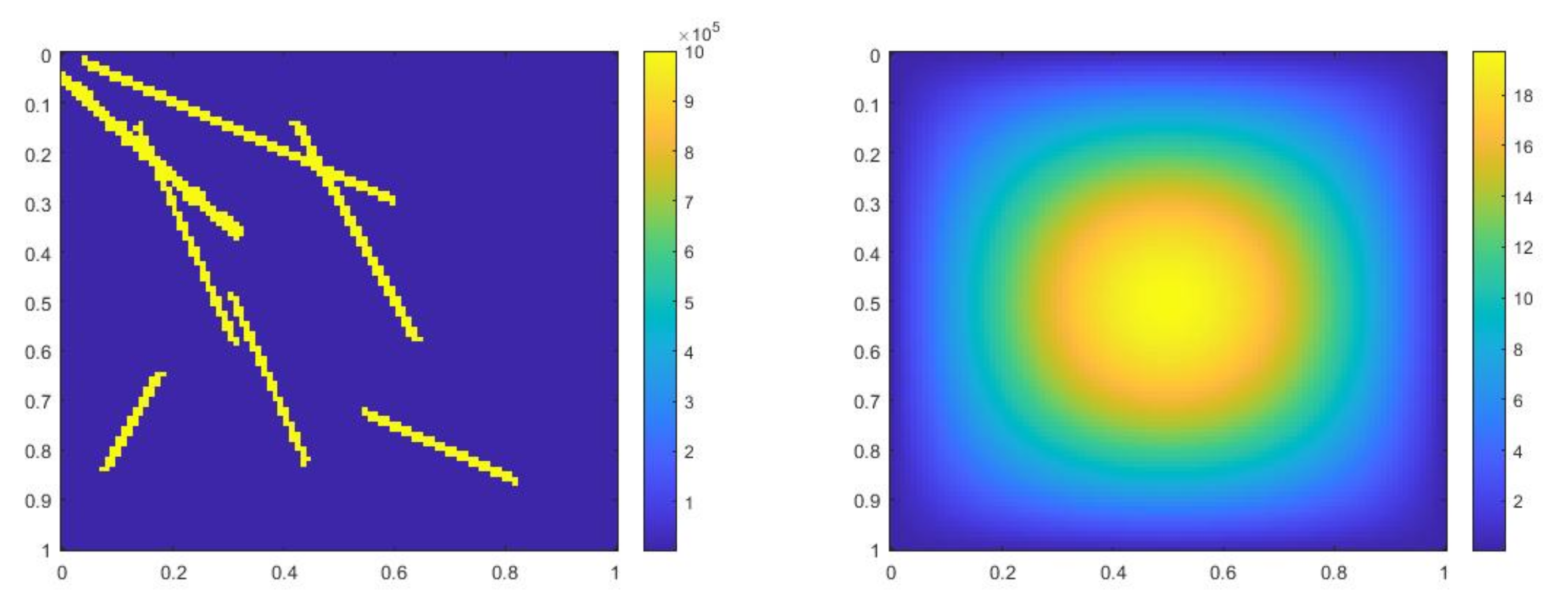
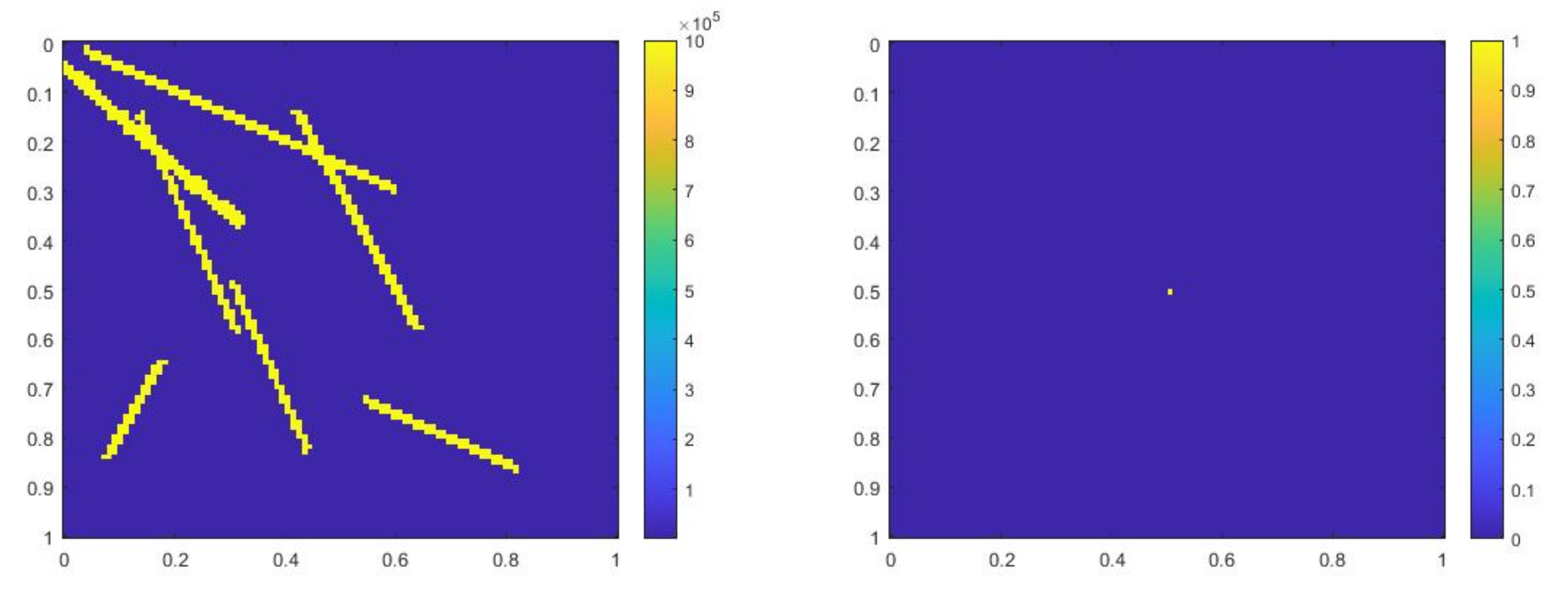
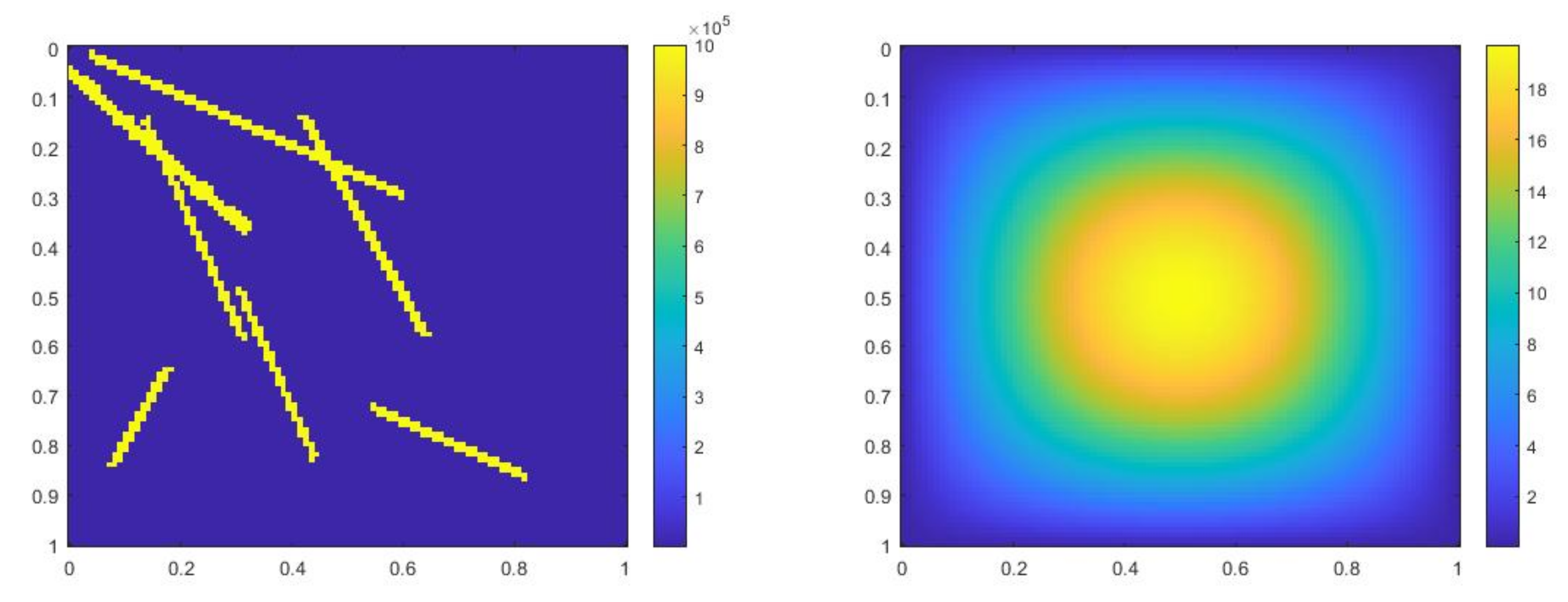
6.1. and Constructions
6.1.1. CEM Method
6.1.2. Construction of
6.2. Linear
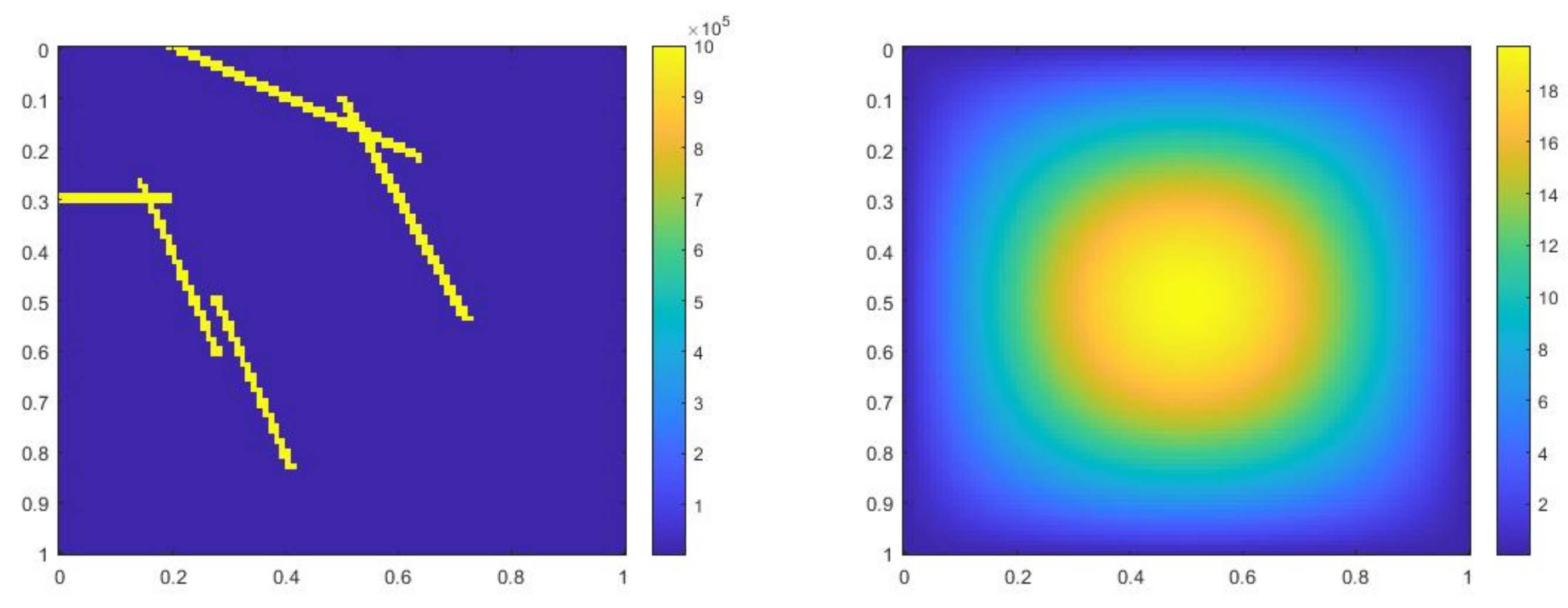
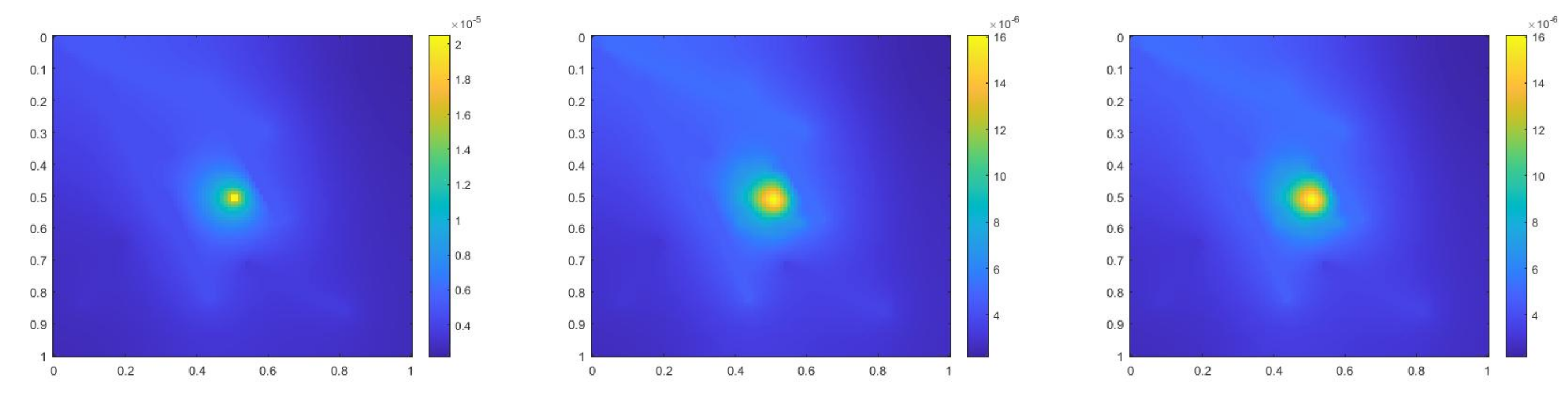
6.3. Nonlinear
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ehlers, W. Darcy, Forchheimer, Brinkman and Richards: Classical hydromechanical equations and their significance in the light of the TPM. Arch. Appl. Mech. 2020, 1–21. [Google Scholar] [CrossRef]
- Bear, J. Dynamics of Fluids in Porous Media; Courier Corporation: North Chelmsford, MA, USA, 2013. [Google Scholar]
- Chung, E.T.; Efendiev, Y.; Leung, W.T.; Vabishchevich, P.N. Contrast-independent partially explicit time discretizations for multiscale flow problems. arXiv 2021, arXiv:2101.04863. [Google Scholar] [CrossRef]
- Chung, E.T.; Efendiev, Y.; Leung, W.T.; Vabishchevich, P.N. Contrast-independent partially explicit time discretizations for multiscale wave problems. arXiv 2021, arXiv:2102.13198. [Google Scholar]
- Efendiev, Y.; Hou, T. Multiscale Finite Element Methods: Theory and Applications; Surveys and Tutorials in the Applied Mathematical Sciences; Springer: New York, NY, USA, 2009; Volume 4. [Google Scholar]
- Le Bris, C.; Legoll, F.; Lozinski, A. An MsFEM type approach for perforated domains. Multiscale Model. Simul. 2014, 12, 1046–1077. [Google Scholar] [CrossRef] [Green Version]
- Hou, T.; Wu, X. A multiscale finite element method for elliptic problems in composite materials and porous media. J. Comput. Phys. 1997, 134, 169–189. [Google Scholar] [CrossRef] [Green Version]
- Jenny, P.; Lee, S.; Tchelepi, H. Multi-scale finite volume method for elliptic problems in subsurface flow simulation. J. Comput. Phys. 2003, 187, 47–67. [Google Scholar] [CrossRef]
- Chung, E.T.; Efendiev, Y.; Hou, T. Adaptive multiscale model reduction with generalized multiscale finite element methods. J. Comput. Phys. 2016, 320, 69–95. [Google Scholar] [CrossRef] [Green Version]
- Efendiev, Y.; Galvis, J.; Hou, T. Generalized multiscale finite element methods (GMsFEM). J. Comput. Phys. 2013, 251, 116–135. [Google Scholar] [CrossRef] [Green Version]
- Chung, E.T.; Efendiev, Y.; Leung, W.T. Constraint energy minimizing generalized multiscale finite element method. Comput. Methods Appl. Mech. Eng. 2018, 339, 298–319. [Google Scholar] [CrossRef] [Green Version]
- Chung, E.T.; Efendiev, Y.; Leung, W.T. Constraint energy minimizing generalized multiscale finite element method in the mixed formulation. Comput. Geosci. 2018, 22, 677–693. [Google Scholar] [CrossRef] [Green Version]
- Chung, E.T.; Efendiev, Y.; Leung, W.T.; Vasilyeva, M.; Wang, Y. Non-local multi-continua upscaling for flows in heterogeneous fractured media. J. Comput. Phys. 2018, 372, 22–34. [Google Scholar] [CrossRef] [Green Version]
- Owhadi, H.; Zhang, L. Metric-based upscaling. Comm. Pure. Appl. Math. 2007, 60, 675–723. [Google Scholar] [CrossRef]
- E, W.; Engquist, B. Heterogeneous multiscale methods. Comm. Math. Sci. 2003, 1, 87–132. [Google Scholar] [CrossRef] [Green Version]
- Henning, P.; Målqvist, A.; Peterseim, D. A localized orthogonal decomposition method for semi-linear elliptic problems. ESAIM Math. Model. Numer. Anal. 2014, 48, 1331–1349. [Google Scholar] [CrossRef] [Green Version]
- Roberts, A.; Kevrekidis, I. General tooth boundary conditions for equation free modeling. SIAM J. Sci. Comput. 2007, 29, 1495–1510. [Google Scholar] [CrossRef]
- Samaey, G.; Kevrekidis, I.; Roose, D. Patch dynamics with buffers for homogenization problems. J. Comput. Phys. 2006, 213, 264–287. [Google Scholar] [CrossRef] [Green Version]
- Hou, T.Y.; Li, Q.; Zhang, P. Exploring the locally low dimensional structure in solving random elliptic PDEs. Multiscale Model. Simul. 2017, 15, 661–695. [Google Scholar] [CrossRef] [Green Version]
- Hou, T.Y.; Ma, D.; Zhang, Z. A model reduction method for multiscale elliptic PDEs with random coefficients using an optimization approach. Multiscale Model. Simul. 2019, 17, 826–853. [Google Scholar] [CrossRef] [Green Version]
- Hou, T.Y.; Huang, D.; Lam, K.C.; Zhang, P. An adaptive fast solver for a general class of positive definite matrices via energy decomposition. Multiscale Model. Simul. 2018, 16, 615–678. [Google Scholar] [CrossRef] [Green Version]
- Brown, D.L.; Efendiev, Y.; Hoang, V.H. An efficient hierarchical multiscale finite element method for Stokes equations in slowly varying media. Multiscale Model. Simul. 2013, 11, 30–58. [Google Scholar] [CrossRef]
- Efendiev, Y.; Pankov, A. Numerical homogenization of monotone elliptic operators. SIAM J. Multiscale Model. Simul. 2003, 2, 62–79. [Google Scholar] [CrossRef] [Green Version]
- Efendiev, Y.; Pankov, A. Homogenization of nonlinear random parabolic operators. Adv. Differ. Equ. 2005, 10, 1235–1260. [Google Scholar] [CrossRef] [Green Version]
- Efendiev, Y.; Galvis, J.; Li, G.; Presho, M. Generalized multiscale finite element methods. Nonlinear elliptic equations. Commun. Comput. Phys. 2014, 15, 733–755. [Google Scholar] [CrossRef]
- Marchuk, G.I. Splitting and alternating direction methods. Handb. Numer. Anal. 1990, 1, 197–462. [Google Scholar]
- Vabishchevich, P.N. Additive Operator-Difference Schemes: Splitting Schemes; Walter de Gruyter GmbH: Berlin, Germany; Boston, MA, USA, 2013. [Google Scholar]
- Ascher, U.M.; Ruuth, S.J.; Spiteri, R.J. Implicit-explicit Runge-Kutta methods for time-dependent partial differential equations. Appl. Numer. Math. 1997, 25, 151–167. [Google Scholar] [CrossRef]
- Li, T.; Abdulle, A.; Ee, W. Effectiveness of implicit methods for stiff stochastic differential equations. Commun. Comput. Phys. Citeseer 2008, 3, 295–307. [Google Scholar]
- Abdulle, A. Explicit methods for stiff stochastic differential equations. In Numerical Analysis of Multiscale Computations; Springer: Berlin, Germany, 2012; pp. 1–22. [Google Scholar]
- Engquist, B.; Tsai, Y.H. Heterogeneous multiscale methods for stiff ordinary differential equations. Math. Comput. 2005, 74, 1707–1742. [Google Scholar] [CrossRef]
- Ariel, G.; Engquist, B.; Tsai, R. A multiscale method for highly oscillatory ordinary differential equations with resonance. Math. Comput. 2009, 78, 929–956. [Google Scholar] [CrossRef]
- Narayanamurthi, M.; Tranquilli, P.; Sandu, A.; Tokman, M. EPIRK-W and EPIRK-K time discretization methods. J. Sci. Comput. 2019, 78, 167–201. [Google Scholar] [CrossRef] [Green Version]
- Shi, H.; Li, Y. Local discontinuous Galerkin methods with implicit-explicit multistep time-marching for solving the nonlinear Cahn-Hilliard equation. J. Comput. Phys. 2019, 394, 719–731. [Google Scholar] [CrossRef]
- Duchemin, L.; Eggers, J. The explicit–implicit–null method: Removing the numerical instability of PDEs. J. Comput. Phys. 2014, 263, 37–52. [Google Scholar] [CrossRef] [Green Version]
- Frank, J.; Hundsdorfer, W.; Verwer, J. On the stability of implicit-explicit linear multistep methods. Appl. Numer. Math. 1997, 25, 193–205. [Google Scholar] [CrossRef] [Green Version]
- Izzo, G.; Jackiewicz, Z. Highly stable implicit–explicit Runge–Kutta methods. Appl. Numer. Math. 2017, 113, 71–92. [Google Scholar] [CrossRef]
- Ruuth, S.J. Implicit-explicit methods for reaction-diffusion problems in pattern formation. J. Math. Biol. 1995, 34, 148–176. [Google Scholar] [CrossRef]
- Hundsdorfer, W.; Ruuth, S.J. IMEX extensions of linear multistep methods with general monotonicity and boundedness properties. J. Comput. Phys. 2007, 225, 2016–2042. [Google Scholar] [CrossRef] [Green Version]
- Du, J.; Yang, Y. Third-order conservative sign-preserving and steady-state-preserving time integrations and applications in stiff multispecies and multireaction detonations. J. Comput. Phys. 2019, 395, 489–510. [Google Scholar] [CrossRef]
- Brezzi, F.; Franca, L.P.; Hughes, T.J.R.; Russo, A. b = ∫g. Comput. Methods Appl. Mech. Engrg. 1997, 145, 329–339. [Google Scholar] [CrossRef]
- Bensoussan, A.; Lions, J.L.; Papanicolaou, G. Asymptotic Analysis for Periodic Structures; Studies in Mathematics and Its Applications; North-Holland: Amsterdam, The Netherlands, 1978; Volume 5. [Google Scholar]
- Aldaz, J. Strengthened Cauchy-Schwarz and Hölder inequalities. arXiv 2013, arXiv:1302.2254. [Google Scholar]






























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chung, E.T.; Efendiev, Y.; Leung, W.T.; Li, W. Contrast-Independent, Partially-Explicit Time Discretizations for Nonlinear Multiscale Problems. Mathematics 2021, 9, 3000. https://doi.org/10.3390/math9233000
Chung ET, Efendiev Y, Leung WT, Li W. Contrast-Independent, Partially-Explicit Time Discretizations for Nonlinear Multiscale Problems. Mathematics. 2021; 9(23):3000. https://doi.org/10.3390/math9233000
Chicago/Turabian StyleChung, Eric T., Yalchin Efendiev, Wing Tat Leung, and Wenyuan Li. 2021. "Contrast-Independent, Partially-Explicit Time Discretizations for Nonlinear Multiscale Problems" Mathematics 9, no. 23: 3000. https://doi.org/10.3390/math9233000