
Adjustment of Force–Gradient Operator in Symplectic Methods


Abstract
:1. Introduction
2. Extension of Force–Gradient Operator
2.1. Existing Force–Gradient Symplectic Integrators
2.2. Adjustment of the Force–Gradient Operator
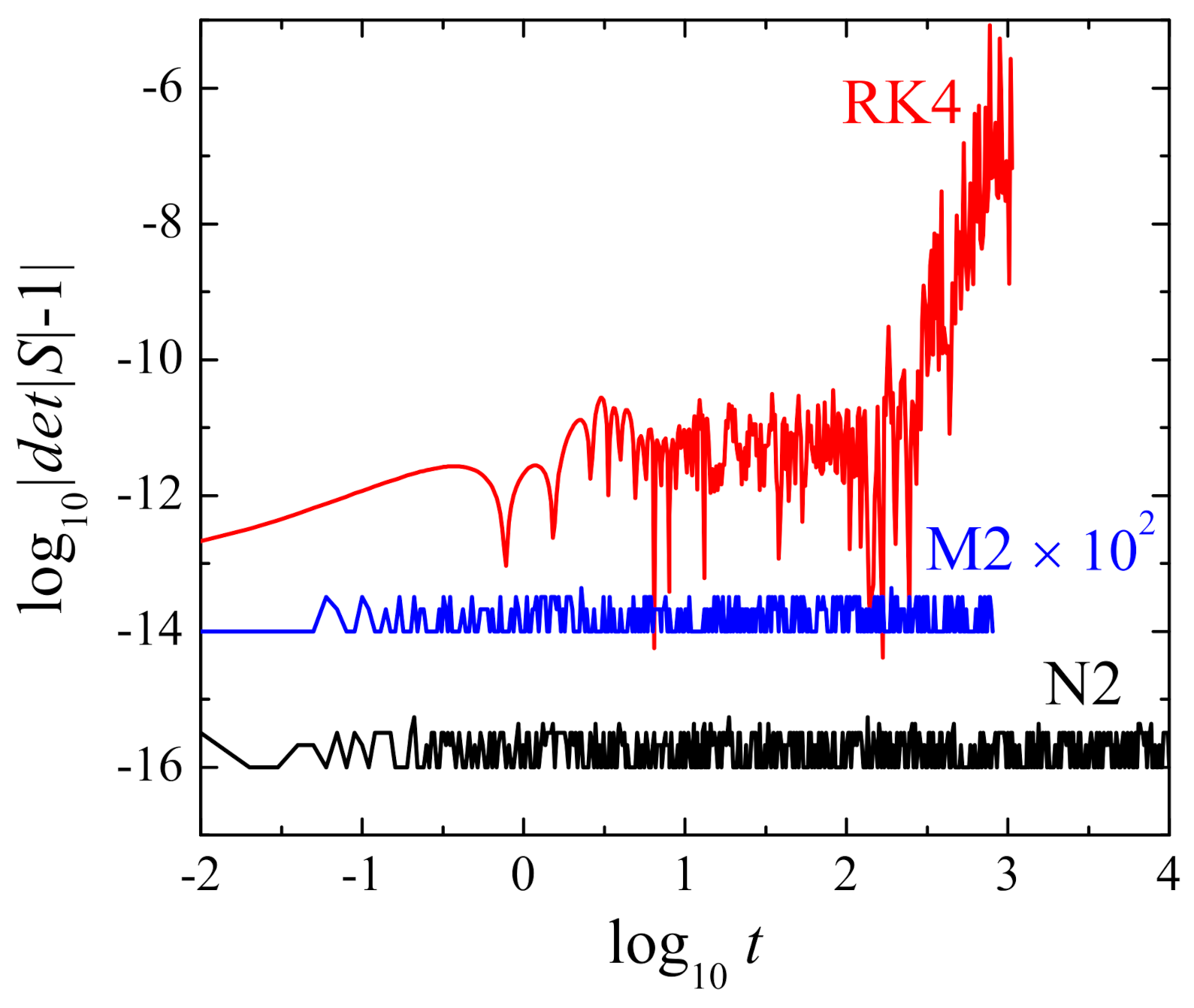
2.3. Preservations of Symplecticity and Volume of the Phase Space
3. Numerical Simulations
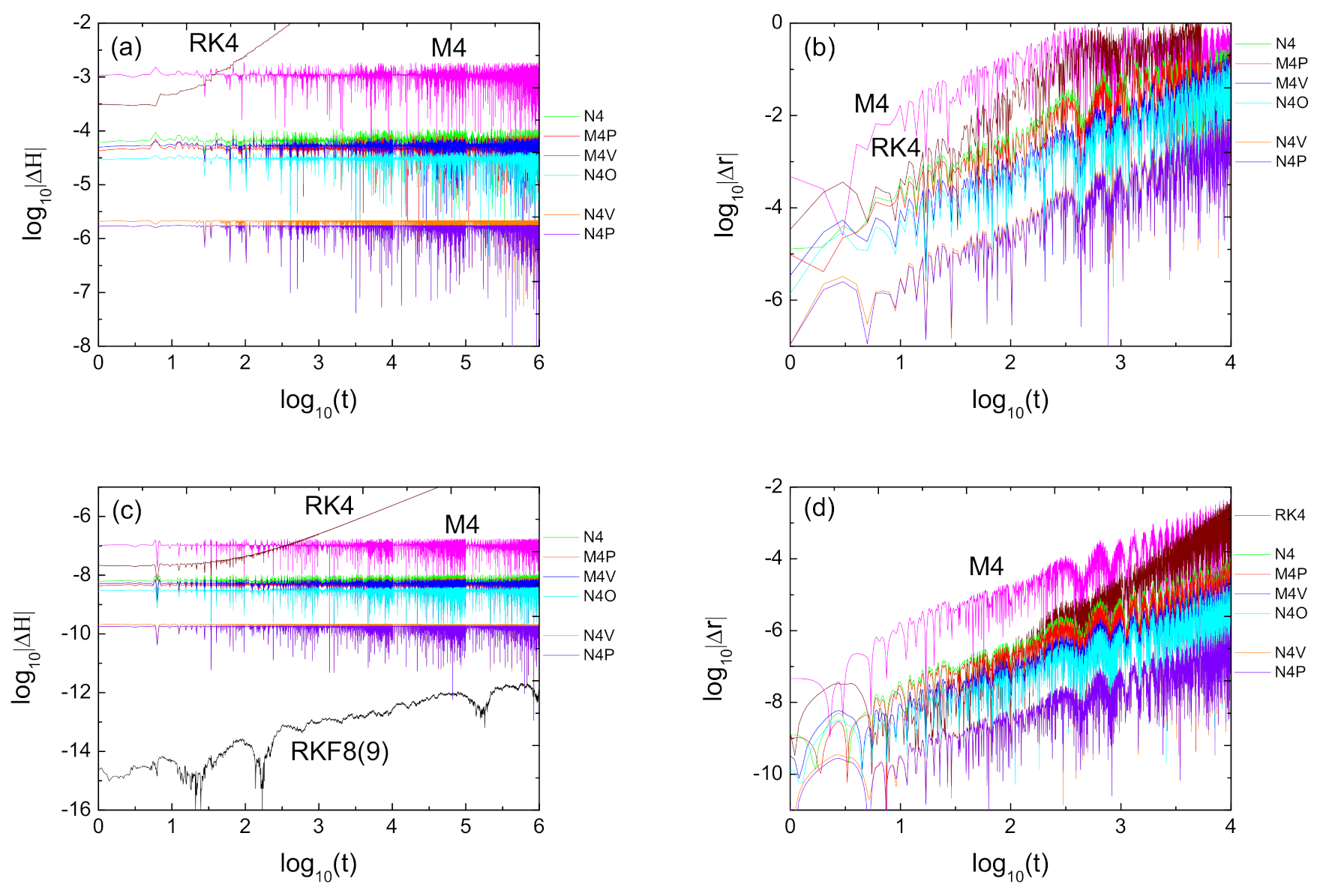
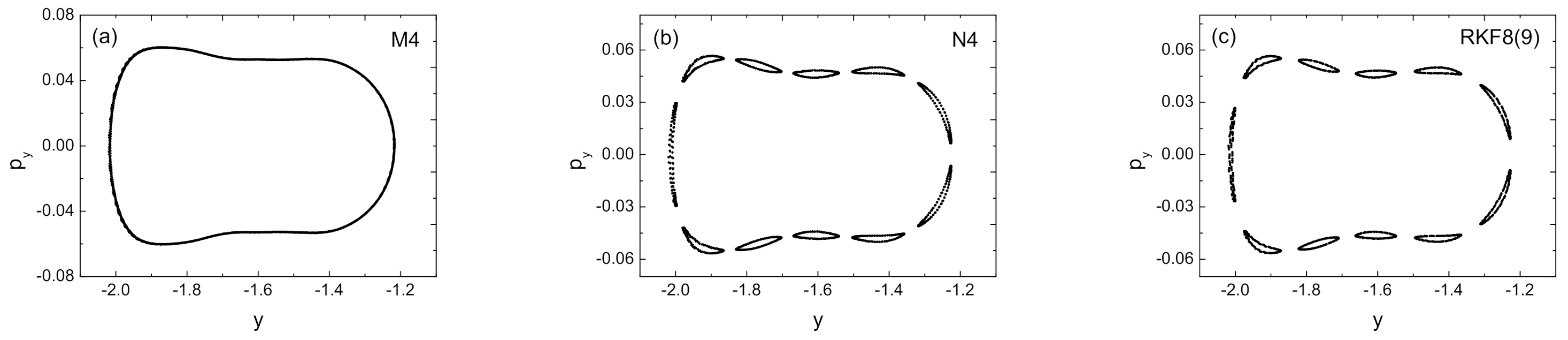
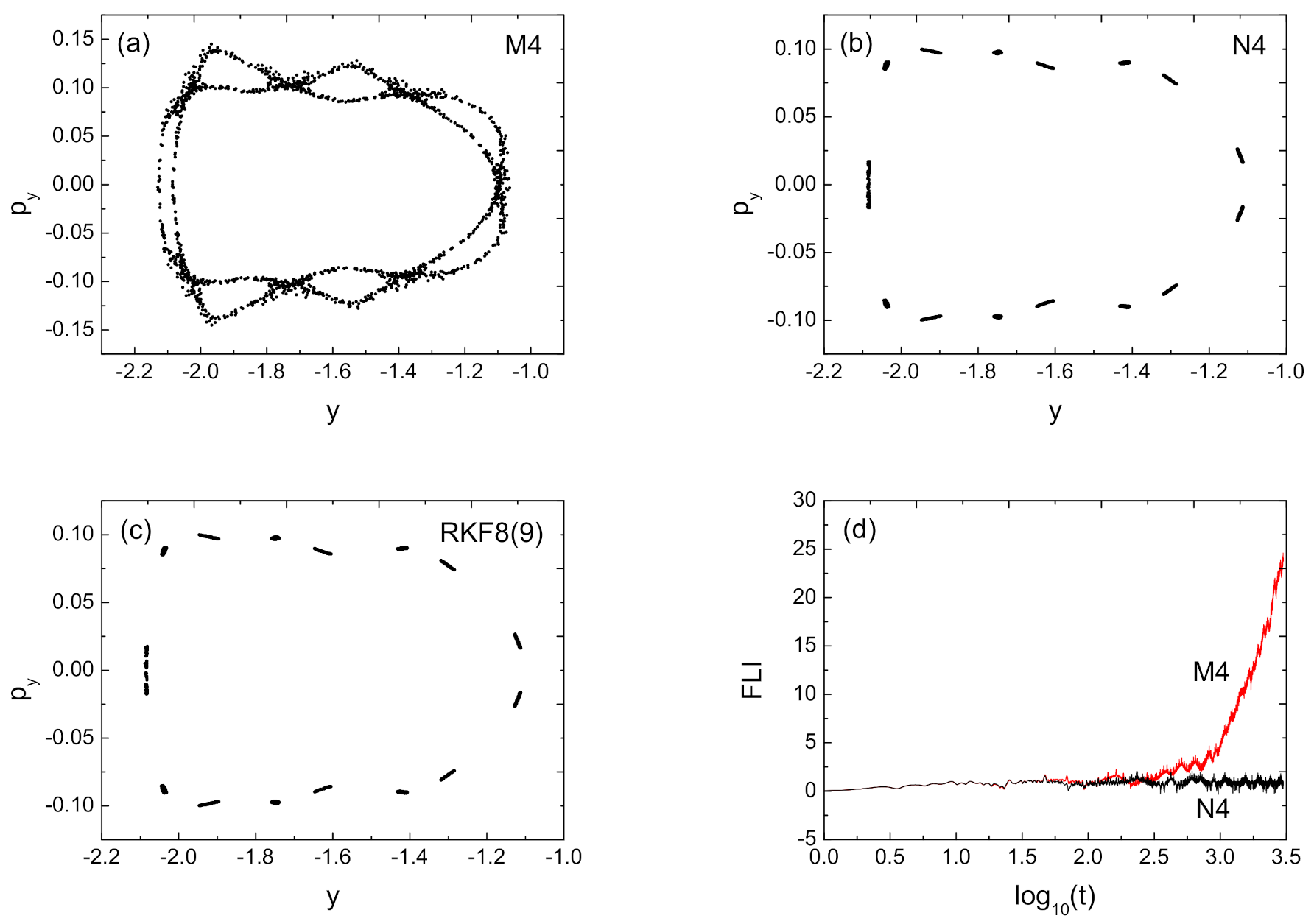
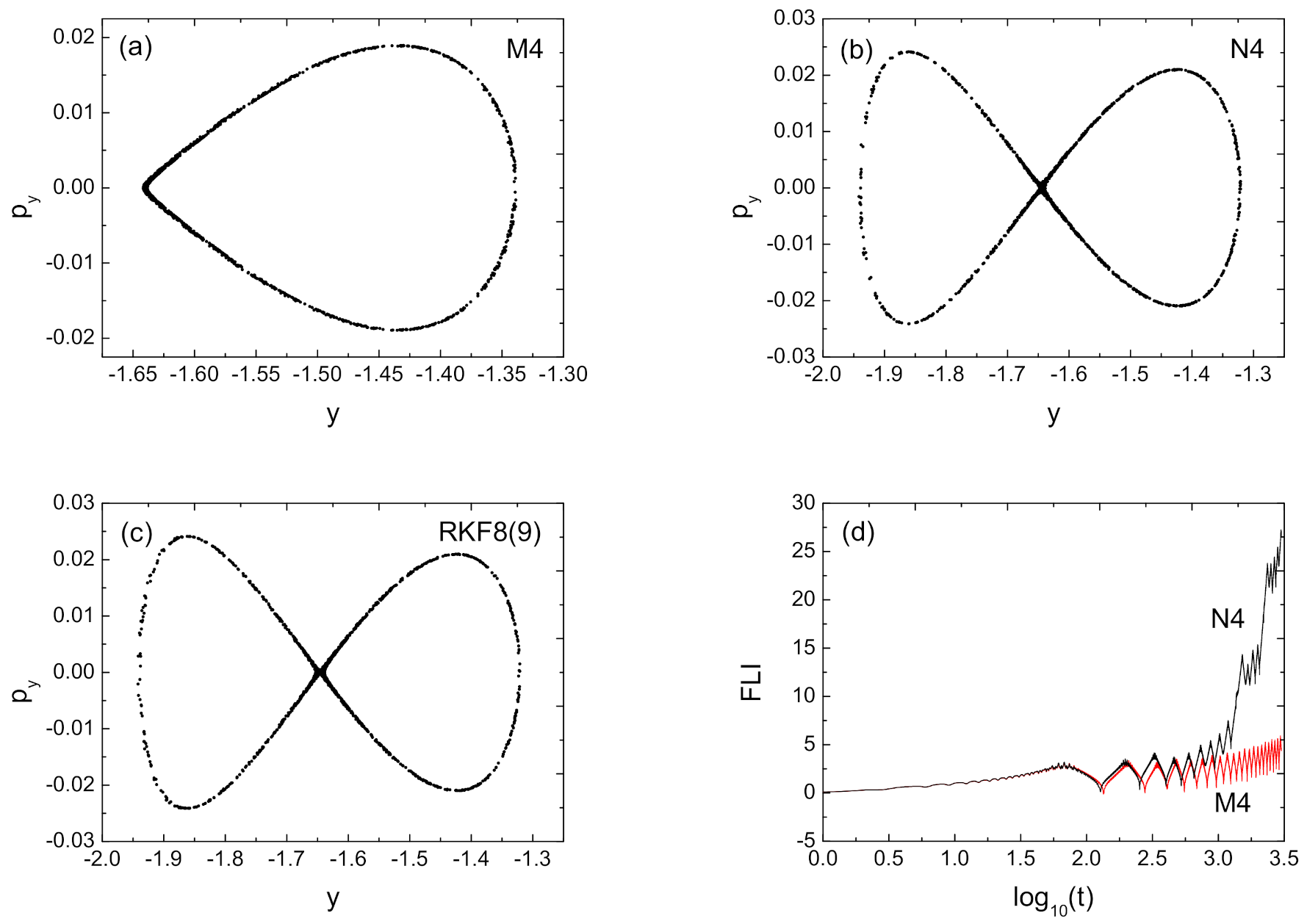
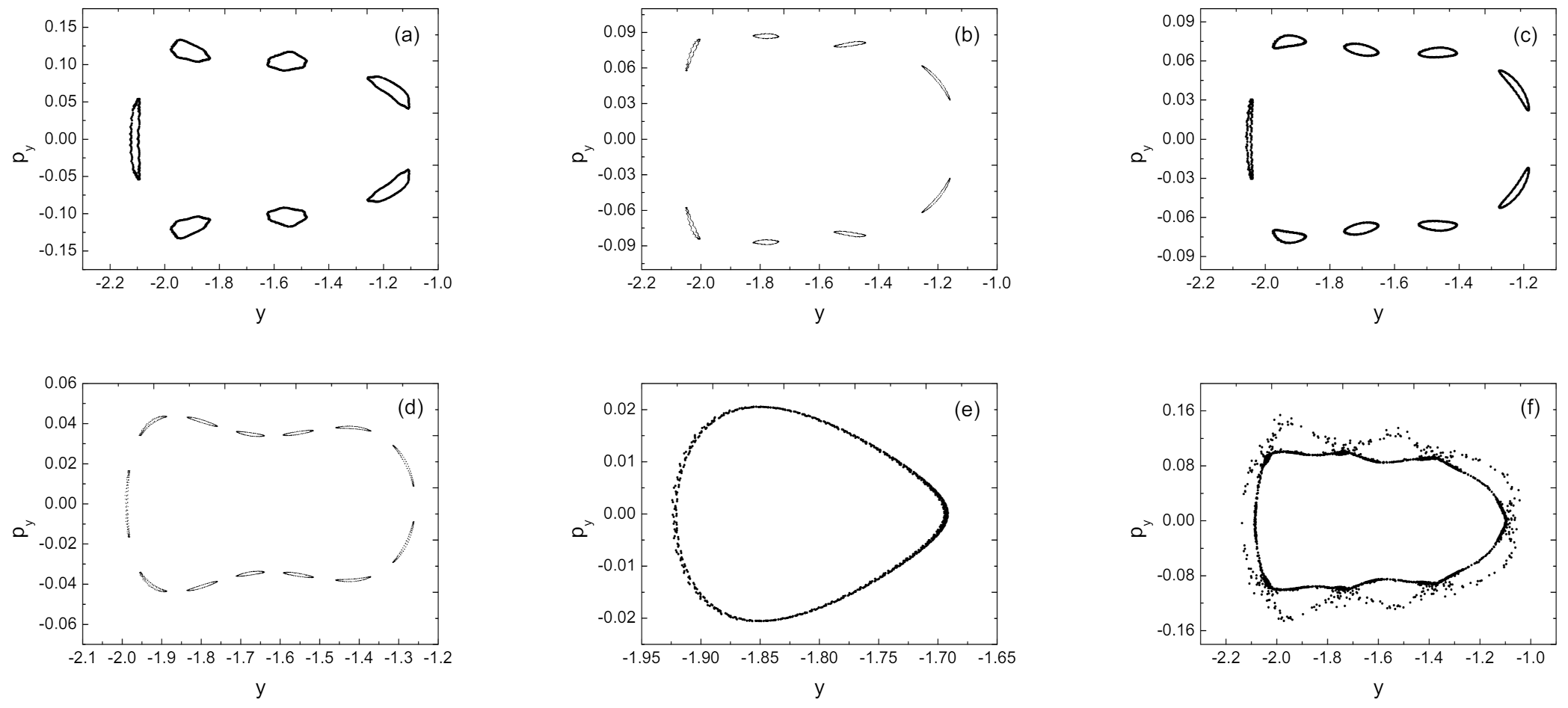
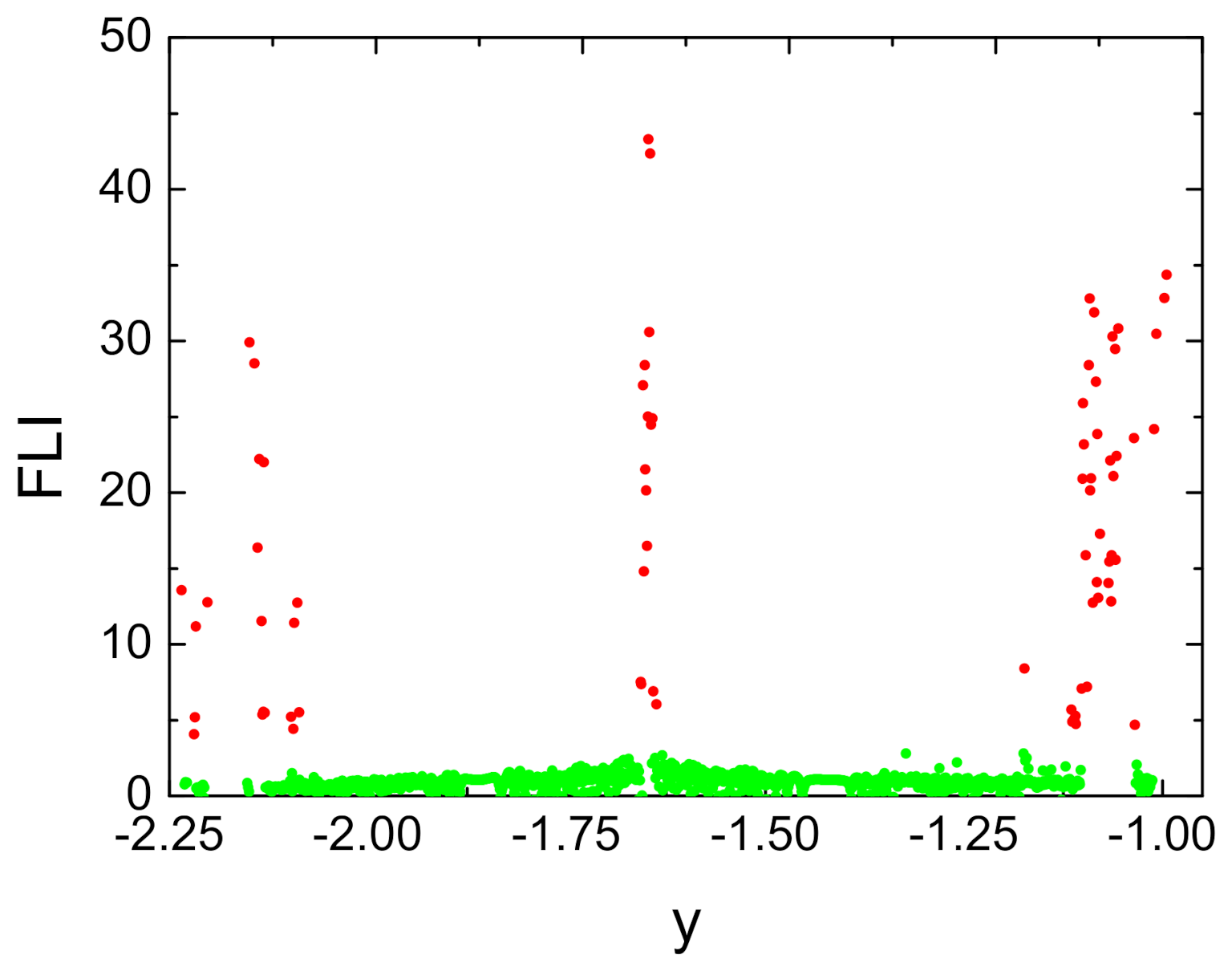
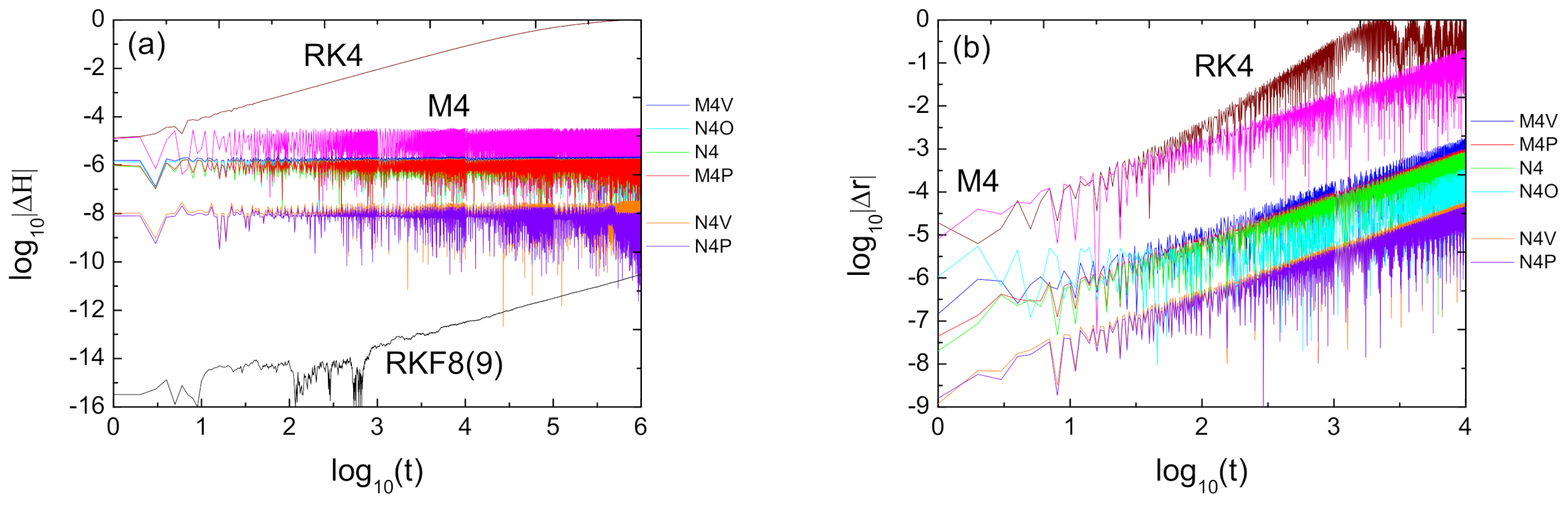
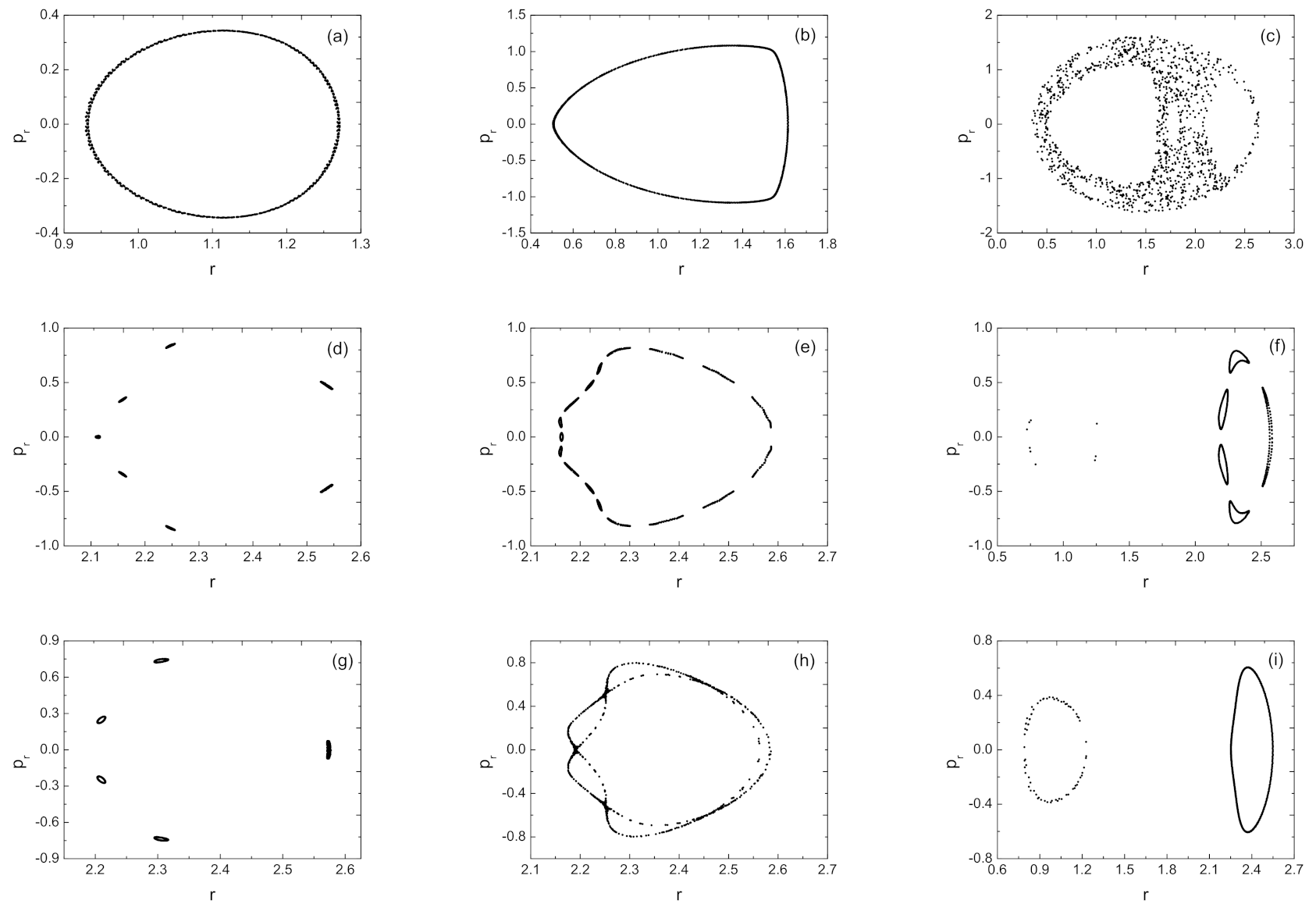
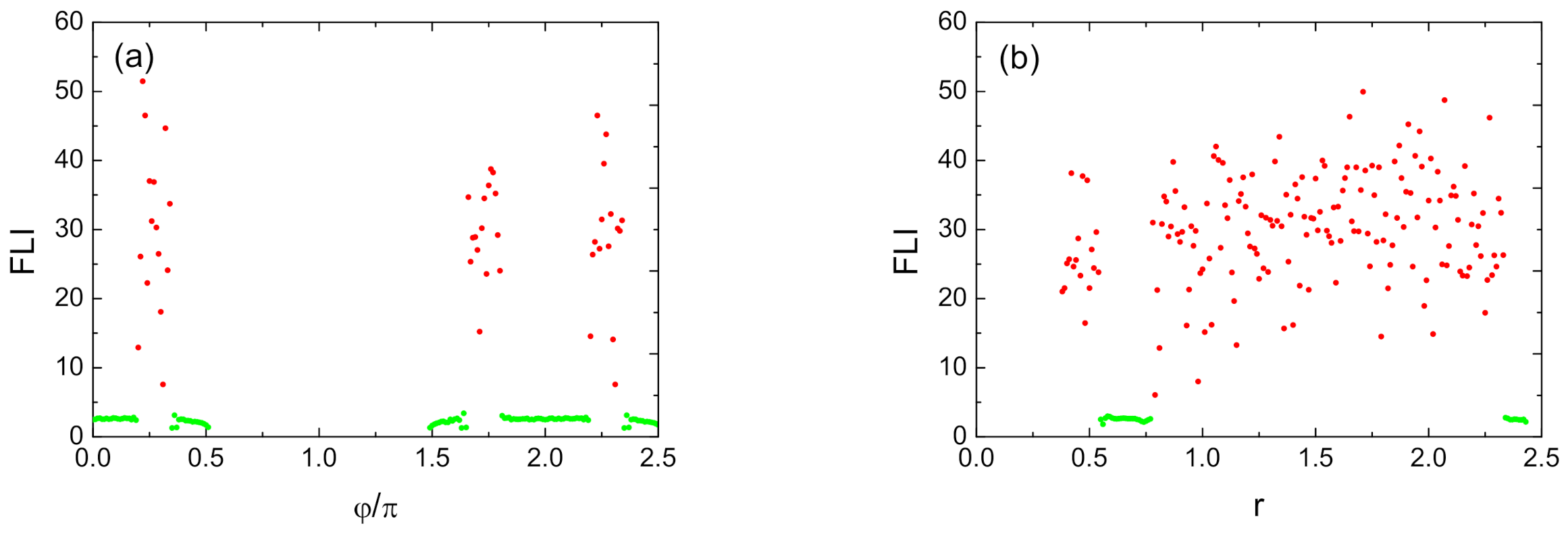
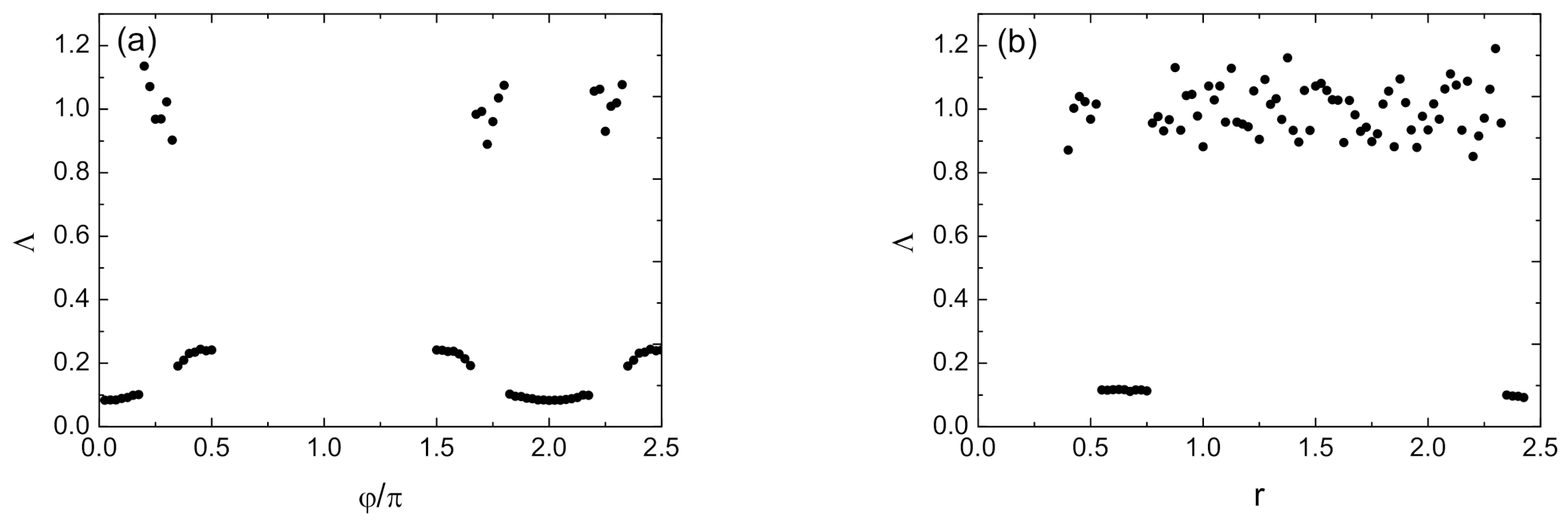
3.1. Modified Hénon–Heiles System
3.2. Spring Pendulum
4. Conclusions and Discussions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Wisdom, J. The origin of the Kirkwood gaps—A mapping for asteroidal motion near the 3/1 commensurability. Astron. J. 1982, 87, 577. [Google Scholar] [CrossRef]
- Ruth, R.D. A Canonical Integration Technique. IEEE Trans. Nucl. Sci. 1983, 30, 2669. [Google Scholar] [CrossRef]
- Feng, K. On difference schemes and symplectic geometry. In Proceedings of the 1984 Beijing Symposium on Differential Geometry and Differential Equations; Feng, K., Ed.; Science Press: Beijing, China, 1985; p. 42. [Google Scholar]
- Nacozy, P.E. The Use of Integrals in Numerical Integrations of the N-Body Problem. Astrophys. Space Sci. 1971, 14, 40. [Google Scholar] [CrossRef]
- Fukushima, T. Efficient Orbit Integration by Scaling for Kepler Energy Consistency. Astron. J. 2003, 126, 1097. [Google Scholar] [CrossRef] [Green Version]
- Bacchini, F.; Ripperda, B.; Chen, A.Y.; Sironi, L. Generalized, Energy-conserving Numerical Simulations of Particles in General Relativity. I. Time-like and Null Geodesics. Astropys. J. Suppl. 2018, 237, 6. [Google Scholar] [CrossRef] [Green Version]
- Feng, K.; Qin, M. The symplectic methods for the computation of hamiltonian equations. Lect. Note Math. 1987, 1297, 1. [Google Scholar]
- Sanz-Serna, J.M. Runge-kutta schemes for Hamiltonian systems. BIT 1988, 28, 877. [Google Scholar] [CrossRef]
- Kopáček, O.; Karas, V.; Kovář, J.; Stuchlík, Z. Transition from Regular to Chaotic Circulation in Magnetized Coronae near Compact Objects. Astrophys. J. 2010, 722, 1240. [Google Scholar] [CrossRef]
- Liao, X.H. Symplectic Integrator for General Near-Integrable Hamiltonian System. Celest. Mech. Dyn. Astron. 1997, 66, 243. [Google Scholar] [CrossRef]
- Preto, M.; Saha, P. On Post-Newtonian Orbits and the Galactic-center Stars. Astrophys. J. 2009, 703, 1743. [Google Scholar] [CrossRef] [Green Version]
- Lubich, C.; Walther, B.; Brügmann, B. Symplectic integration of post-Newtonian equations of motion with spin. Phys. Rev. D 2010, 81, 104025. [Google Scholar] [CrossRef] [Green Version]
- Forest, E. Geometric integration for particle accelerators. J. Phys. A Math. Gen. 2006, 39, 5321. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, W.; Liu, F.; Wu, X. Construction of Explicit Symplectic Integrators in General Relativity. I. Schwarzschild Black Holes. Astrophys. J. 2021, 907, 66. [Google Scholar] [CrossRef]
- Pihajoki, P. Explicit methods in extended phase space for inseparable Hamiltonian problems. Celest. Mech. Dyn. Astron. 2015, 121, 211. [Google Scholar] [CrossRef] [Green Version]
- Forest, E.; Ruth, R. Fourth-order symplectic integration. Phys. D 1990, 43, 105. [Google Scholar] [CrossRef] [Green Version]
- Yoshida, H. Construction of higher order symplectic integrators. Phys. Lett. A 1990, 150, 262. [Google Scholar] [CrossRef]
- Suzuki, M.; Umeno, K. Computer Simulation Studies in Condensed Matter Physics VI; Landau, D.P., Mon, K.K., Schüttler, H.-B., Eds.; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Omelyan, I.P.; Mryglod, I.M.; Folk, R. Optimized Forest-Ruth- and Suzuki-like algorithms for integration of motion in many-body systems. Comput. Phys. Commun. 2002, 146, 188. [Google Scholar] [CrossRef] [Green Version]
- Chin, S.A. Symplectic integrators from composite operator factorizations. Phys. Lett. A 1997, 226, 344. [Google Scholar] [CrossRef]
- Omelyan, I.P.; Mryglod, I.M.; Folk, R. Construction of high-order force–gradient algorithms for integration of motion in classical and quantum systems. Phys. Rev. E 2002, 66, 026701. [Google Scholar] [CrossRef] [Green Version]
- Omelyan, I.P.; Mryglod, I.M.; Folk, R. Symplectic analytically integrable decomposition algorithms: Classification, derivation, and application to molecular dynamics, quantum and celestial mechanics simulations. Comput. Phys. Commun. 2003, 151, 272. [Google Scholar] [CrossRef]
- Wisdom, J.; Holman, M. Symplectic maps for the N-body problem. Astron. J. 1991, 102, 1528. [Google Scholar] [CrossRef]
- Chambers, J.E.; Murison, M.A. Pseudo-High-Order Symplectic Integrators. Astron. J. 2000, 119, 425. [Google Scholar] [CrossRef] [Green Version]
- Hernandez, D.M.; Dehnen, W. A study of symplectic integrators for planetary system problems: Error analysis and comparisons. Mon. Not. Astron. Soc. 2017, 468, 2614. [Google Scholar] [CrossRef] [Green Version]
- Swope, W.C.; Andersen, H.C.; Berens, P.H.; Wilson, K.R. A computer simulation method for the calculation of equilibrium constants for the formation of physical clusters of molecules: Application to small water clusters. J. Chem. Phys. 1982, 76, 637. [Google Scholar] [CrossRef]
- Feng, K.; Qin, M. Symplectic Geometric Algorithms for Hamiltonian Systems, Zhejiang Science and Technology Publishing House: Hangzhou, China; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Hénon, M.; Heiles, C. The applicability of the third integral of motion: Some numerical experiments. Astron. J. 1964, 69, 73. [Google Scholar] [CrossRef] [Green Version]
- Tancredi, G.; Sánchez, A.; Roig, F. A Comparison Between Methods to Compute Lyapunov Exponents. Astron. J. 2001, 121, 1171. [Google Scholar] [CrossRef]
- Froeschlé, C.; Lega, E. On the Structure of Symplectic Mappings. The Fast Lyapunov Indicator: A Very Sensitive Tool. Celest. Mech. Dyn. Astron. 2000, 78, 167. [Google Scholar] [CrossRef]
- Wu, X.; Huang, T.; Zhang, H. Lyapunov indices with two nearby trajectories in a curved spacetime. Phys. Rew. D. 2006, 74, 083001. [Google Scholar] [CrossRef] [Green Version]
- Gottwald, G.A.; Melbourne, I. A new test for chaos in deterministic systems. Proc. R. Soc. A Math. Phys. Eng. Sci. 2004, 460, 603. [Google Scholar] [CrossRef] [Green Version]
- Itoh, T.; Abe, K. Hamiltonian-Conserving Discrete Canonical Equations Based on Variational Difference Quotients. J. Comp. Phys. 1988, 76, 85. [Google Scholar] [CrossRef]
- Voglis, N.; Stavropoulos, I.; Kalapotharakos, C. Chaotic motion and spiral structure in self-consistent models of rotating galaxies. Mon. Not. R. Astron. Soc. 2006, 372, 901. [Google Scholar] [CrossRef] [Green Version]
- Harsoula, M.; Efthymiopoulos, C.; Contopoulos, G. Analytical forms of chaotic spiral arms. Mon. Not. R. Astron. Soc. 2016, 459, 748. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | RK4 | RKF8(9) | M4 | M4P | M4V | N4 | N4O | N4P | N4V |
|---|---|---|---|---|---|---|---|---|---|
| 1.29 | −9.69 | −2.73 | −4.08 | −4.13 | −3.96 | −4.40 | −5.75 | −5.66 | |
| −3.63 | −11.67 | −6.75 | −8.09 | −8.14 | −7.97 | −8.40 | −9.72 | −9.67 |
| Method | RK4 | M4 | M4P | M4V | N4 | N4O | N4P | N4V |
|---|---|---|---|---|---|---|---|---|
| 0.47 | 0.006 | −0.56 | −0.63 | −0.49 | −0.87 | −2.06 | −2.03 | |
| −2.38 | −2.32 | −4.07 | −4.50 | −3.96 | −4.72 | −5.858 | −5.856 |
| Method | RK4 | RKF8(9) | M4 | M4P | M4V | N4 | N4O | N4P | N4V |
|---|---|---|---|---|---|---|---|---|---|
| 0.33 | 24 | 0.51 | 0.66 | 0.64 | 0.44 | 0.44 | 0.59 | 0.59 | |
| 2.56 | 83 | 4.53 | 5.89 | 5.70 | 3.63 | 3.64 | 5.22 | 5.23 |
| Method | RK4 | RKF8(9) | M4 | M4P | M4V | N4 | N4O | N4P | N4V |
|---|---|---|---|---|---|---|---|---|---|
| 0.04 | −10.53 | −4.47 | −5.73 | −5.65 | −5.73 | −5.74 | −7.65 | −7.47 | |
| 0.13 | −0.67 | −2.99 | −2.74 | −3.06 | −3.45 | −4.34 | −4.24 |
| Method | RK4 | RKF8(9) | M4 | M4P | M4V | N4 | N4O | N4P | N4V |
|---|---|---|---|---|---|---|---|---|---|
| Time | 0.73 | 28 | 3.70 | 4.56 | 3.86 | 2.78 | 2.98 | 3.89 | 3.30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Wu, X.; Liang, E. Adjustment of Force–Gradient Operator in Symplectic Methods. Mathematics 2021, 9, 2718. https://doi.org/10.3390/math9212718
Zhang L, Wu X, Liang E. Adjustment of Force–Gradient Operator in Symplectic Methods. Mathematics. 2021; 9(21):2718. https://doi.org/10.3390/math9212718
Chicago/Turabian StyleZhang, Lina, Xin Wu, and Enwei Liang. 2021. "Adjustment of Force–Gradient Operator in Symplectic Methods" Mathematics 9, no. 21: 2718. https://doi.org/10.3390/math9212718