
The Curve Estimation of Combined Truncated Spline and Fourier Series Estimators for Multiresponse Nonparametric Regression


Abstract
:1. Introduction
2. Materials and Methods
2.1. Multiresponse Nonparametric Regression, Truncated Spline Function, and Fourier Series Function
2.2. Penalized Weighted Least Square
3. Results
3.1. Curve Estimation of Combined Truncated Spline and Fourier Series Estimators for Multiresponse Nonparametric Regression
3.2. Estimation of Error Variance–Covariance Matrix
3.3. Smoothing Parameter Selection
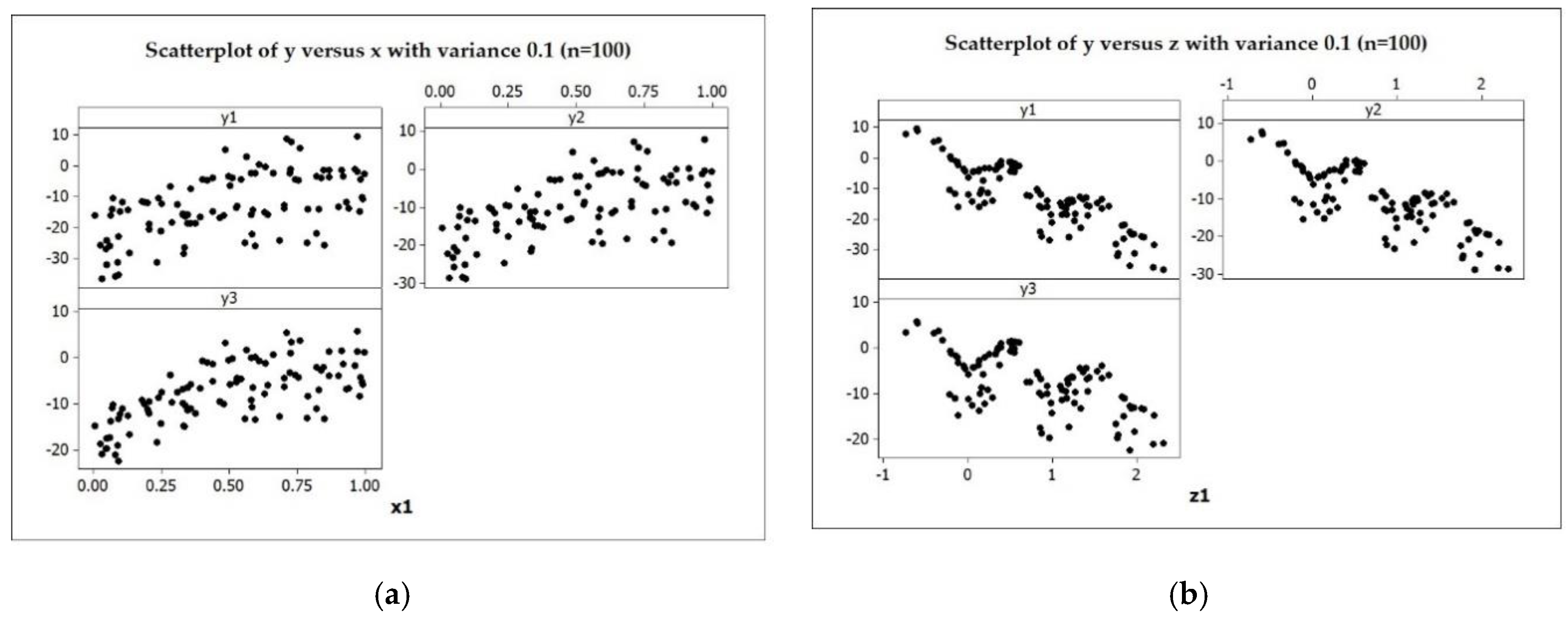
3.4. Simulation Study
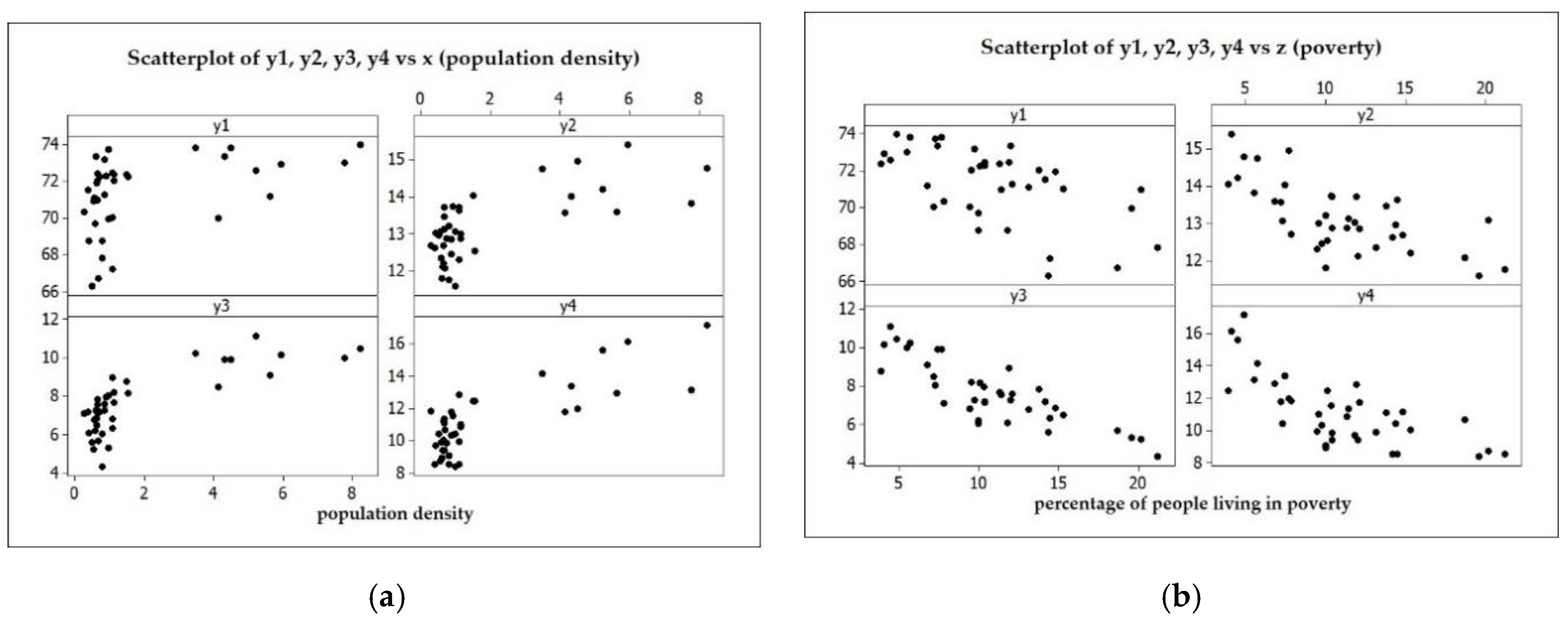
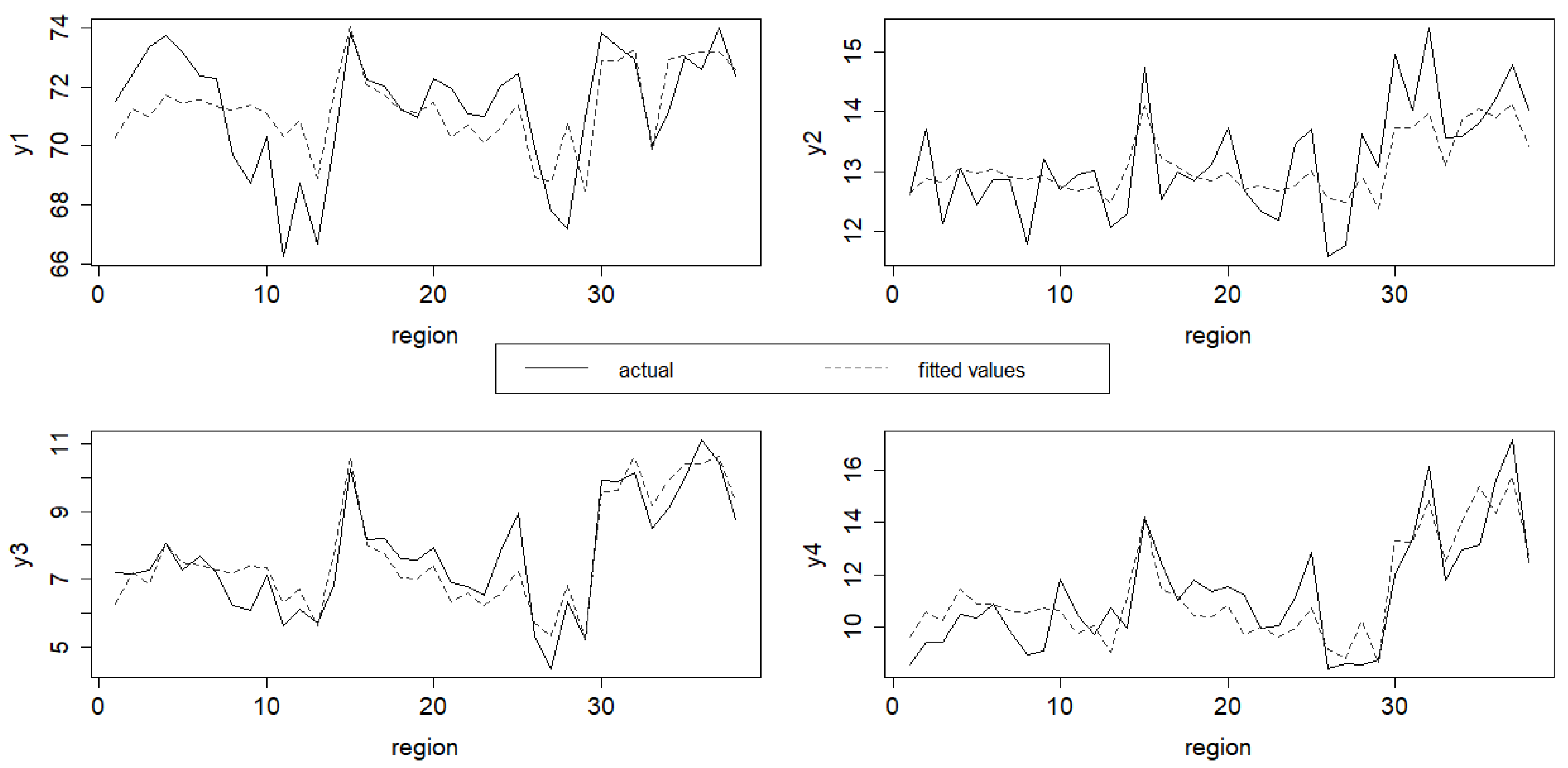
3.5. Data Application
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GoF | goodness-of-fit |
| GCV | generalized cross-validation |
| MSE | mean square error |
| MLE | maximum likelihood estimation |
| OLS | ordinary least square |
| PLS | penalized least square |
| PWLS | penalized weighted least square |
| WLS | weighted least square |
Appendix A
Appendix B
Appendix C
Appendix D
Appendix E
Appendix F
Appendix G

{kind=link}
{kind=link}
{kind=link}
| Variance | Number of Oscillations | Number of Knots | n = 20 | n = 50 | ||||
|---|---|---|---|---|---|---|---|---|
| GCV | R2 | MSE | GCV | R2 | MSE | |||
| 0.1 | 1 | 1 | 7.023 | 88.665 | 4.527 | 7.207 | 90.170 | 6.735 |
| 2 | 6.859 | 89.866 | 4.080 | 6.848 | 90.607 | 6.312 | ||
| 3 | 6.470 | 91.672 | 3.336 | 6.685 * | 91.172 | 6.075 | ||
| 2 | 1 | 6.777 | 87.649 | 5.036 | 7.074 | 91.133 | 5.960 | |
| 2 | 6.386 * | 88.288 | 4.712 | 6.972 | 91.609 | 5.638 | ||
| 3 | 6.388 | 89.881 | 4.085 | 7.165 | 91.835 | 5.489 | ||
| 3 | 1 | 6.535 | 86.398 | 5.294 | 7.074 | 91.133 | 5.959 | |
| 2 | 6.601 | 88.112 | 5.151 | 6.972 | 91.610 | 5.638 | ||
| 3 | 6.617 | 87.929 | 4.970 | 7.166 | 91.833 | 5.489 | ||
| 0.5 | 1 | 1 | 9.185 | 93.280 | 5.667 | 9.217 | 90.952 | 7.783 |
| 2 | 10.010 | 93.303 | 5.655 | 7.141 | 93.293 | 5.769 | ||
| 3 | 10.139 | 93.824 | 5.219 | 7.265 | 93.384 | 5.692 | ||
| 2 | 1 | 7.970 | 92.470 | 6.455 | 9.215 | 90.933 | 7.797 | |
| 2 | 8.193 | 92.538 | 6.393 | 7.133 | 93.284 | 5.775 | ||
| 3 | 8.012 | 92.896 | 6.018 | 7.293 | 93.436 | 5.645 | ||
| 3 | 1 | 10.772 | 92.210 | 6.599 | 9.215 | 90.930 | 7.799 | |
| 2 | 9.263 | 93.328 | 5.655 | 7.132 | 93.283 | 5.776 | ||
| 3 | 8.396 | 92.557 | 6.306 | 7.293 | 93.433 | 5.647 | ||
| 1.0 | 1 | 1 | 9.256 | 92.935 | 5.719 | 7.559 | 94.734 | 7.064 |
| 2 | 10.136 | 93.218 | 5.491 | 7.319 | 94.972 | 6.746 | ||
| 3 | 10.241 | 93.751 | 5.058 | 6.890 | 95.332 | 6.262 | ||
| 2 | 1 | 8.019 | 91.988 | 6.495 | 7.585 | 95.227 | 6.401 | |
| 2 | 7.838 | 92.518 | 6.116 | 7.461 | 95.508 | 6.024 | ||
| 3 | 7.330 | 93.445 | 5.506 | 7.380 | 95.753 | 5.698 | ||
| 3 | 1 | 10.593 | 91.666 | 6.763 | 7.490 | 94.862 | 6.903 | |
| 2 | 7.668 | 92.629 | 5.983 | 7.175 | 95.155 | 6.521 | ||
| 3 | 8.697 | 93.833 | 5.013 | 6.968 | 95.351 | 6.245 | ||
Appendix H
| Response Variable | Parameter | Estimation | Response Variable | Parameter | Estimation |
| −0.932 | −0.102 | ||||
| 0.869 | 0.865 | ||||
| −3057.409 | −510.292 | ||||
| 6107.433 | 1015.208 | ||||
| −3050.878 | −505.678 | ||||
| −0.677 | −0.411 | ||||
| 1355.724 | 224.955 | ||||
| −935.001 | −156.440 | ||||
| 423.443 | 69.027 | ||||
| −92.348 | −15.588 | ||||
| −0.747 | −0.482 | ||||
| 0.393 | 0.969 | ||||
| −619.153 | −684.712 | ||||
| 1235.608 | 1363.397 | ||||
| −616.769 | −679.163 | ||||
| −0.180 | −0.456 | ||||
| 274.146 | 302.146 | ||||
| −189.489 | −209.894 | ||||
| 85.224 | 92.927 | ||||
| −18.760 | −20.891 |
References
- Härdle, W. Applied Nonparametric Regression; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Eubank, R.L. Nonparametric Regression and Spline Smoothing, 2nd ed.; Marcel Dekker, Inc.: New York, NY, USA, 1999. [Google Scholar]
- Budakçı, G.; Oruç, H. Further Properties of Quantum Spline Spaces. Mathematics 2020, 8, 1770. [Google Scholar] [CrossRef]
- Du, R.; Yamada, H. Principle of Duality in Cubic Smoothing Spline. Mathematics 2020, 8, 1839. [Google Scholar] [CrossRef]
- Lapshin, V. A nonparametric approach to bond portfolio immunization. Mathematics 2019, 7, 1121. [Google Scholar] [CrossRef] [Green Version]
- Nurcahayani, H.; Budiantara, I.N.; Zain, I. Nonparametric Truncated Spline Regression on Modelling Mean Years Schooling of Regencies in Java. AIP Conf. Proc. 2019, 2194, 020073. [Google Scholar] [CrossRef]
- Yu, W.; Yong, Y.; Guan, G.; Huang, Y.; Su, W.; Cui, C. Valuing guaranteed minimum death benefits by cosine series expansion. Mathematics 2019, 7, 835. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Hart, J.D. A Change-Point Estimator Using Local Fourier series. J. Nonparametr. Stat. 2011, 23, 83–98. [Google Scholar] [CrossRef]
- Bilodeau, M. Fourier Smoother and Additive Models. Can. J. Stat. 1992, 20, 257–269. [Google Scholar] [CrossRef]
- Yang, Y.; Pilanci, M.; Wainwright, M.J. Randomized Sketches for Kernels: Fast and Optimal Nonparametric Regression. Ann. Stat. 2017, 45, 991–1023. [Google Scholar] [CrossRef] [Green Version]
- Zhao, G.; Ma, Y. Robust Nonparametric Kernel Regression Estimator. Stat. Probab. Lett. 2016, 116, 72–79. [Google Scholar] [CrossRef]
- Kayri, M.; Zırhlıoğlu, G. Kernel Smoothing Function and Choosing Bandwidth for Non-Parametric Regression Methods. Ozean J. Appl. Sci. 2009, 2, 49–54. [Google Scholar]
- Syengo, C.K.; Pyeye, S.; Orwa, G.O.; Odhiambo, R.O. Local Polynomial Regression Estimator of the Finite Population Total under Stratified Random Sampling: A Model-Based Approach. Open J. Stat. 2016, 6, 1085–1097. [Google Scholar] [CrossRef] [Green Version]
- Chamidah, N.; Budiantara, I.N.; Sunaryo, S.; Zain, I. Designing of Child Growth Chart Based on Multi-Response Local Polynomial Modeling. J. Math. Stat. 2012, 8, 342–347. [Google Scholar]
- Opsomer, J.D.; Ruppert, D. Fitting a Bivariate Additive Model by Local Polynomial Regression. Ann. Stat. 1997, 25, 186–211. [Google Scholar] [CrossRef]
- Maronge, J.M.; Zhai, Y.; Wiens, D.P.; Fang, Z. Optimal designs for spline wavelet regression models. J. Stat. Plan. Inference 2017, 184, 94–104. [Google Scholar] [CrossRef] [Green Version]
- Antoniadis, A.; Bigot, J.; Sapatinas, T. Wavelet estimators in nonparametric regression: A comparative simulation study. J. Stat. Softw. 2001, 6, 1–83. [Google Scholar] [CrossRef] [Green Version]
- Antoniadis, A.; Leblanc, F. Nonparametric Wavelet Regression for Binary Response. Statistics 2000, 34, 183–213. [Google Scholar] [CrossRef]
- Sifriyani; Budiantara, I.N.; Kartiko, S.H.; Gunardi. Evaluation of Factors Affecting Increased Unemployment in East Java Using NGWR-TS Method. Int. J. Sci. Basic Appl. Res. 2019, 46, 123–142. [Google Scholar]
- Sifriyani; Kartiko, S.H.; Budiantara, I.N.; Gunardi. Development of Nonparametric Geographically Weighted Regression using Truncated Spline Approach. Songklanakarin J. Sci. Technol. 2018, 40, 909–920. [Google Scholar]
- Budiantara, I.N.; Ratnasari, V.; Ratna, M.; Zain, I. The Combination of Spline and Kernel Estimator for Nonparametric Regression and Its Properties. Appl. Math. Sci. 2015, 9, 6083–6094. [Google Scholar] [CrossRef]
- Ratnasari, V.; Budiantara, I.N.; Ratna, M.; Zain, I. Estimation of Nonparametric Regression Curve using Mixed Estimator of Multivariable Truncated Spline and Multivariable Kernel. Glob. J. Pure Appl. Math. 2016, 12, 5047–5057. [Google Scholar]
- Hidayat, R.; Budiantara, I.N.; Otok, B.W.; Ratnasari, V. The regression curve estimation by using mixed smoothing spline and kernel (MsS-K) model. Commun. Stat. Theory Methods 2020. [Google Scholar] [CrossRef]
- Budiantara, I.N.; Ratnasari, V.; Ratna, M.; Wibowo, W.; Afifah, N.; Rahmawati, D.P.; Octavanny, M.A.D. Modeling Percentage of Poor People In Indonesia Using Kernel And Fourier Series Mixed Estimator In Nonparametric Regression. Rev. Investig. Operacional. 2019, 40, 538–550. [Google Scholar]
- Nurcahayani, H.; Budiantara, I.N.; Zain, I. The Semiparametric Regression Curve Estimation by Using Mixed Truncated Spline and Fourier Series Model. AIP Conf. Proc. 2021, 2329, 060025. [Google Scholar] [CrossRef]
- Mariati, N.P.A.M.; Budiantara, I.N.; Ratnasari, V. Combination Estimation of Smoothing Spline and Fourier Series in Nonparametric Regression. J. Math. 2020, 2020, 1–10. [Google Scholar] [CrossRef]
- Sudiarsa, I.W.; Budiantara, I.N.; Suhartono; Purnami, S.W. Combined Estimator Fourier Series and Spline Truncated in Multivariable Nonparametric Regression. Appl. Math. Sci. 2015, 9, 4997–5010. [Google Scholar] [CrossRef]
- Octavanny, M.A.D.; Budiantara, I.N.; Kuswanto, H.; Rahmawati, D.P. Nonparametric Regression Model for Longitudinal Data with Mixed Truncated Spline and Fourier Series. Abstr. Appl. Anal. 2020, 2020, 1–11. [Google Scholar] [CrossRef]
- Caldeira, J.F.; Gupta, R.; Torrent, H.S. Forecasting U.S. Aggregate Stock Market Excess Return: Do Functional Data Analysis Add Economic Value? Mathematics 2020, 8, 2042. [Google Scholar] [CrossRef]
- Correa-Quezada, R.; Cueva-Rodríguez, L.; Álvarez-García, J.; del Río-Rama, M.d.l.C. Application of the Kernel Density Function for the Analysis of Regional Growth and Convergence in the Service Sector through Productivity. Mathematics 2020, 8, 1234. [Google Scholar] [CrossRef]
- Green, P.J.; Silverman, B.W. Nonparametric Regression and Generalized Linear Models, 1st ed.; Chapman and Hall/CRC: New York, NY, USA, 1993. [Google Scholar]
- Wang, Y.; Guo, W.; Brown, M.B. Spline smoothing for bivariate data with applications to association between hormones. Stat. Sin. 2000, 10, 377–397. [Google Scholar]
- Wahba, G. Spline Models for Observational Data; SIAM Society For Industrial And Applied Mathemathics: Philadelphia, PA, USA, 1990. [Google Scholar]
- Craven, P.; Wahba, G. Smoothing noisy data with spline functions—Estimating the correct degree of smoothing by the method of generalized cross-validation. Numer. Math. 1978, 31, 377–403. [Google Scholar] [CrossRef]
- United Nations Development Programme. Human Development Report 1990; Oxford University Press: Jericho, NY, USA, 1990. [Google Scholar]
- BPS—Statistics Indonesia. Indeks Pembangunan Manusia 2018; BPS—Statistics Indonesia: Jakarta, Indonesia, 2019. [Google Scholar]
- BPS—Statistics of Jawa Timur Province. Provinsi Jawa Timur Dalam Angka 2019; BPS—Statistics of Jawa Timur Province: Jawa Timur, Indonesia, 2019. [Google Scholar]
- Rahayu, A.; Purhadi; Sutikno; Prastyo, D.D. Multivariate Gamma Regression: Parameter Estimation, Hypothesis Testing, and Its Application. Symmetry 2020, 12, 813. [Google Scholar] [CrossRef]
- Sofilda, E.; Hermiyanti, P.; Hamzah, M.Z. Determinant Variable Analysis of Human Development Index in Indonesia (Case For High And Low Index At Period 2004–2013). OIDA Int. J. Sustain. Dev. 2015, 8, 11–28. [Google Scholar]
- Dewanti, P.; Budiantara, I.N.; Rumiati, A.T. Modelling of SDG’s Achievement in East Java Using Bi-responses Nonparametric Regression with Mixed Estimator Spline Truncated and Kernel. J. Phys. Conf. Ser. 2020, 1562, 012016. [Google Scholar] [CrossRef]



| Variance | Number of Oscillations | Number of Knots | Generalized Cross-Validation (GCV) | R2 | Mean Square Error (MSE) |
|---|---|---|---|---|---|
| 0.1 | 1 | 1 | 7.050 | 91.866 | 6.817 |
| 2 | 6.996 | 92.100 | 6.719 | ||
| 3 | 6.525 | 92.991 | 5.853 | ||
| 2 | 1 | 6.413 | 92.964 | 5.875 | |
| 2 | 6.391 | 93.072 | 5.784 | ||
| 3 | 6.386 | 93.167 | 5.704 | ||
| 3 | 1 | 7.017 | 91.876 | 6.785 | |
| 2 | 6.435 | 93.066 | 5.789 | ||
| 3 | 6.098 * | 93.202 | 5.675 | ||
| 0.5 | 1 | 1 | 6.915 | 92.454 | 6.686 |
| 2 | 6.759 | 92.716 | 6.492 | ||
| 3 | 6.634 | 93.023 | 6.328 | ||
| 2 | 1 | 8.183 | 91.121 | 7.913 | |
| 2 | 6.720 | 92.757 | 6.454 | ||
| 3 | 6.383 | 93.671 | 5.640 | ||
| 3 | 1 | 6.145 | 93.645 | 5.663 | |
| 2 | 6.260 | 93.660 | 5.650 | ||
| 3 | 6.381 | 93.673 | 5.638 | ||
| 1.0 | 1 | 1 | 6.408 | 94.856 | 5.905 |
| 2 | 6.479 | 94.906 | 5.847 | ||
| 3 | 6.582 | 94.933 | 5.816 | ||
| 2 | 1 | 6.358 | 94.895 | 5.860 | |
| 2 | 6.417 | 94.955 | 5.791 | ||
| 3 | 6.490 | 95.004 | 5.734 | ||
| 3 | 1 | 6.358 | 94.895 | 5.860 | |
| 2 | 6.417 | 94.955 | 5.791 | ||
| 3 | 6.490 | 95.004 | 5.734 |
| Model 1 | Combined Truncated Spline and Fourier Series Estimator for Multiresponse Nonparametric Regression | |||
| Number of Oscillations | Number of Knots | GCV | MSE | |
| 1 | 1 | 1.43056 | 1.16177 | |
| 2 | 1.45686 | 1.14882 | ||
| 3 | 1.41989 | 1.07056 | ||
| 2 | 1 | 1.43464 | 1.11886 | |
| 2 | 1.46877 | 1.07960 | ||
| 3 | 1.43883 | 1.07192 | ||
| 3 | 1 | 2.10749 | 1.91785 | |
| 2 | 1.44040 | 1.13633 | ||
| 3 | 1.39189 * | 1.08377 | ||
| Model 2 | Truncated Spline Estimator for Multiresponse Nonparametric Regression | |||
| Number of Knots | GCV | MSE | ||
| 1 | 1.478036 | 1.114668 | ||
| 2 | 1.522833 | 1.013464 | ||
| 3 | 1.586664 | 1.055945 | ||
| Model 3 | Fourier Series Estimator for Multiresponse Nonparametric Regression | |||
| Number of Oscillations | GCV | MSE | ||
| 1 | 1.524463 | 1.149681 | ||
| 2 | 1.536081 | 1.089298 | ||
| 3 | 1.578724 | 1.05066 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nurcahayani, H.; Budiantara, I.N.; Zain, I. The Curve Estimation of Combined Truncated Spline and Fourier Series Estimators for Multiresponse Nonparametric Regression. Mathematics 2021, 9, 1141. https://doi.org/10.3390/math9101141
Nurcahayani H, Budiantara IN, Zain I. The Curve Estimation of Combined Truncated Spline and Fourier Series Estimators for Multiresponse Nonparametric Regression. Mathematics. 2021; 9(10):1141. https://doi.org/10.3390/math9101141
Chicago/Turabian StyleNurcahayani, Helida, I Nyoman Budiantara, and Ismaini Zain. 2021. "The Curve Estimation of Combined Truncated Spline and Fourier Series Estimators for Multiresponse Nonparametric Regression" Mathematics 9, no. 10: 1141. https://doi.org/10.3390/math9101141