1. Introduction
The problem of solving nonlinear equation is recognized to be very old in history as many practical problems which arise are nonlinear in nature. Various one-point and multi-point methods are presented to solve nonlinear equations or systems of nonlinear equations [
1,
2,
3]. The above-cited methods are designed for the simple root of nonlinear equations but the behavior of these methods is not similar when dealing with multiple roots of nonlinear equations. The well known Newton’s method with quadratic convergence for simple roots of nonlinear equations decays to first order when dealing with multiple roots of nonlinear equations. These problems lead to minor troubles such as greater computational cost and severe troubles such as no convergence at all. The prior knowledge of multiplicity of roots make it simpler to manage these troubles. The strange behavior of the iterative methods while dealing with multiple roots has been well known since 19th century in the least when Schröder [
4] developed a modification of classical Newton’s method to conserve its second order of convergence for multiple roots. The nonlinear equations with multiple roots commonly arise from different topics such as complex variables, fractional diffusion or image processing, applications to economics and statistics (Lēvy distributions), etc. By knowing the practical nature of multiple root finders, various one-point and multi-point root solvers have been developed in recent past [
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18] but most of them are not optimal as defined by Kung and Traub [
19], who stated that an optimal without memory method can achieve its convergence order at the most
requiring
evaluations of functions or derivatives. As stated by Ostrowski [
1], if an iterative method possess order of convergence as
O and total number of functional evaluations is
n per iterative step, then the index defined by
is recognized as efficiency index of an iterative method.
Sharma and Sharma [
17] proposed the following optimal fourth-order multiple root finder with known multiplicity
m as follows:
where
A two-step sixth-order non-optimal family for multiple roots presented by Geum et al. [
9] is given by:
where,
and
is holomorphic in a neighborhood of
. The following is a special case of their family:
Another non-optimal family of three-point sixth-order methods for multiple roots by Geum et al. [
10] is given as follows:
where
and
The weight functions
is analytic in a neighborhood of 0 and
is holomorphic in a neighborhood of
. The following is a special case of the family in Equation (
3):
The families in Equations (
1) and (
3) require four evaluations of function to produce convergence of order six having efficiency index
and therefore are not optimal in the sense of the Kung–Traub conjecture [
19].
Recently, Behl et al. [
20] presented a multiple root finding family of iterative methods possessing convergence order eight given as:
where the functions
and
are restricted to be analytic functions in the regions nearby
and
respectively, with
and
being
and
complex non-zero free parameters.
We take Case (27) for (
,
,
from the family of Behl et al. [
20] and represent it by
given by:
Most recently, another optimal eighth-order scheme presented by Zafar et al. [
21] is given as:
where
,
are suppose to be free parameters and weight functions
and
are restricted to be analytic in the regions nearby 0 with
and
From the eighth-order family of Zafar et al. [
21], we consider the following special case denoted by
:
The class of iterative methods referred as optimal is significant as compared to non-optimal methods due to their speed of convergence and efficiency index. Therefore, there was a need to develop optimal eighth-order schemes for finding multiple zeros (
) and simple zeros (
) due to their competitive efficiencies and order of convergence [
1]; in addition, fewer iterations are needed to get desired accuracy as compared to iterative methods having order four and six given by Sharma and Geum [
9,
10,
17], respectively. In this paper, our main concern is to find the optimal iterative methods for multiple root
with known multiplicity
of an adequately differentiable nonlinear function
, where
I represents an open interval. We develop an optimal eighth-order zero finder for multiple roots with known multiplicity
. The beauty of the method lies in the fact that developed scheme is simple to implement with minimum possible number of functional evaluations. Four evaluations of the function are needed to obtain a family of convergence order eighth having efficiency index
.
The rest of the paper is organized as follows. In
Section 2, we present the newly developed optimal iterative family of order eight for multiple roots of nonlinear equations. The discussion of analysis of convergence is also given in this section. In
Section 3, some special cases of newly developed eighth-order schemes are presented. In
Section 4, numerical results and comparison of the presented schemes with existing schemes of its domain is discussed. Concluding remarks are given in
Section 5.
3. Special Cases of Weight Functions
From Theorem 1, several choices of weight functions can be obtained. We have considered the following:
Case 1: The polynomial form of the weight function satisfying the conditions in Equation (
10) can be represented as:
The particular iterative method related to Equation (
23) is given by:
Case 2: The second suggested form of the weight functions in which
is constructed using rational weight function satisfying the conditions in Equation (
10) is given by:
The corresponding iterative method in Equation (
25) can be presented as:
Case 3: The third suggested form of the weight function in which
is constructed using trigonometric weight satisfying the conditions in Equation (
10) is given by:
The corresponding iterative method obtained using Equation (
27) is given by:
4. Numerical Tests
In this section, we show the performance of the presented iterative family in Equation (
9) by carrying out some numerical tests and comparing the results with existing method for multiple roots. All numerical computations were performed in Maple 16 programming package using 1000 significant digits of precision. When
was not exact, we preferred to take the accurate value which has larger number of significant digits rather than the assigned precision. The test functions along with their roots
and multiplicity
m are listed in
Table 1 [
22]. The proposed methods SM-1 (Equation (
24)), SM-2 (Equation (
26)) and SM-3 (Equation (
28)) are compared with the methods of Geum et al. given in Equations (
2) and (
4) denoted by GKM-1 and GKM-2 and with method of Bhel given in Equation (
6) denoted by BM and Zafar et al. method given in Equation (
8) denoted by ZM. In
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7 and
Table 8, the error in first three iterations with reference to the sought zeros (
) is considered for different methods. The notation
can be considered as
. The test function along with their initial estimates
and computational order of convergence (COC) is also included in these tables, which is computed by the following expression [
23]:
It is observed that the performance of the new method SM-2 is the same as BM for the function and better than ZM for the function . The newly developed schemes SM-1, SM-2 and SM-3 are not only convergent but also their speed of convergence is better than GKM-1 and GKM-2 while ZM and BM show divergence for the function . For functions , , and , the newly developed schemes SM-1, SM-2 and SM-3 are comparable with ZM and BM. Hence, we conclude that the proposed family is comparable and robust among existing methods for multiple roots.
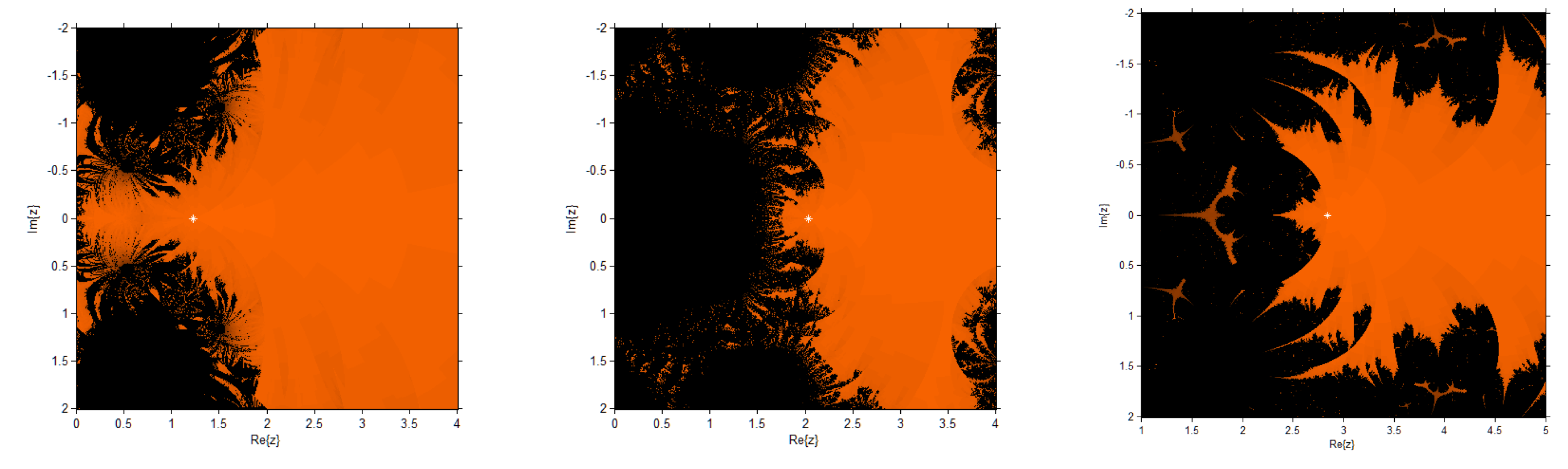
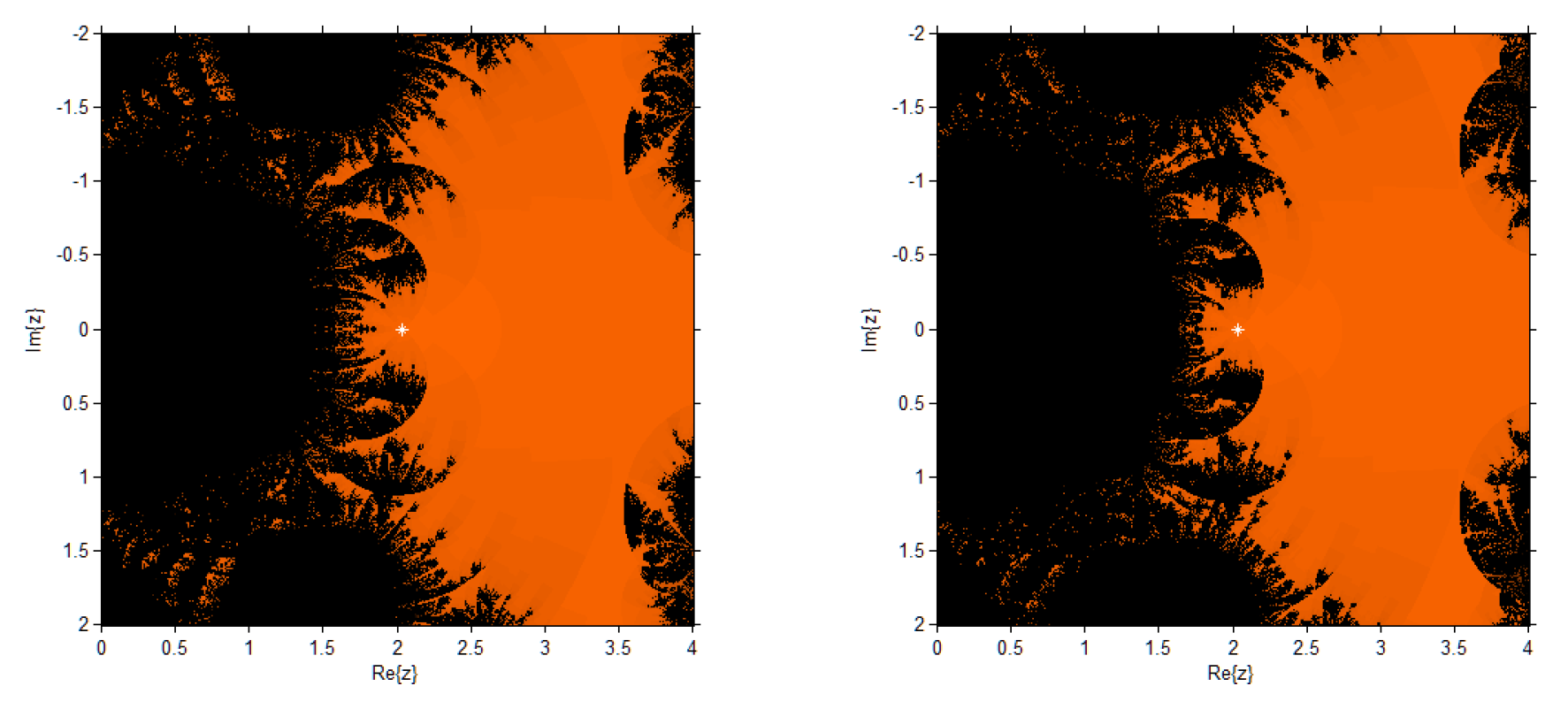
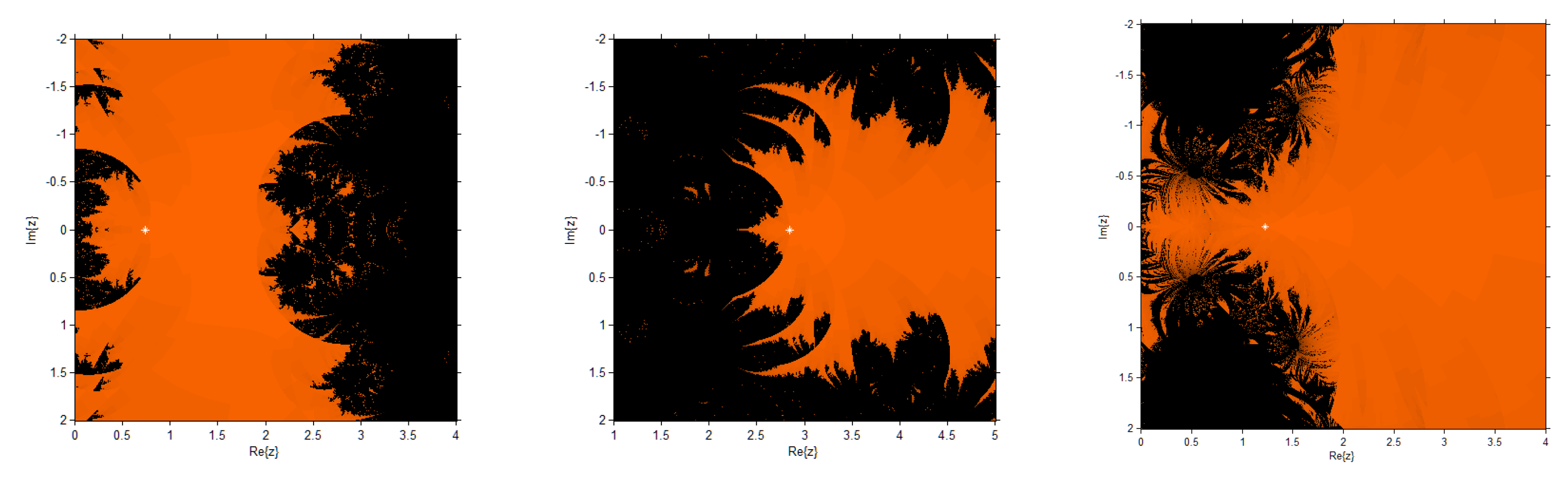
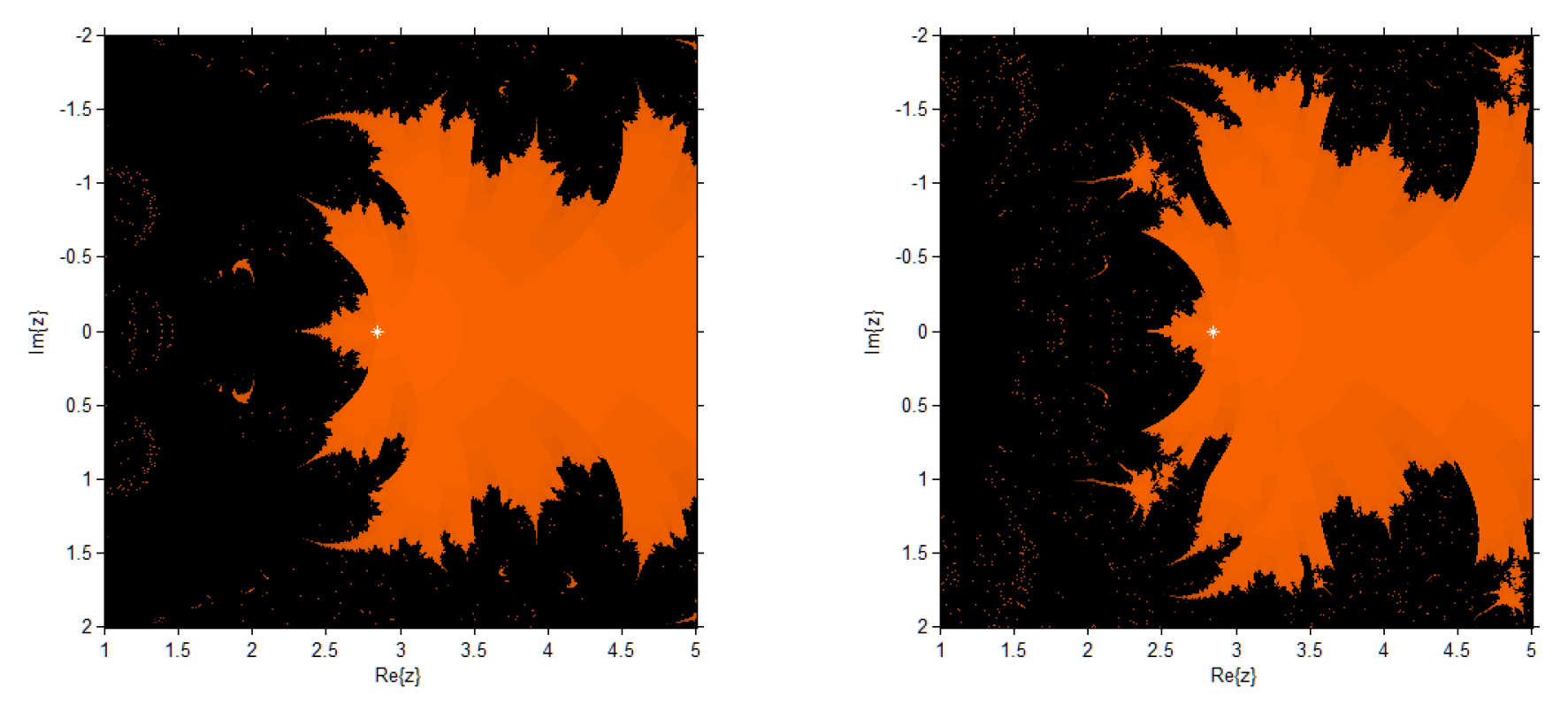
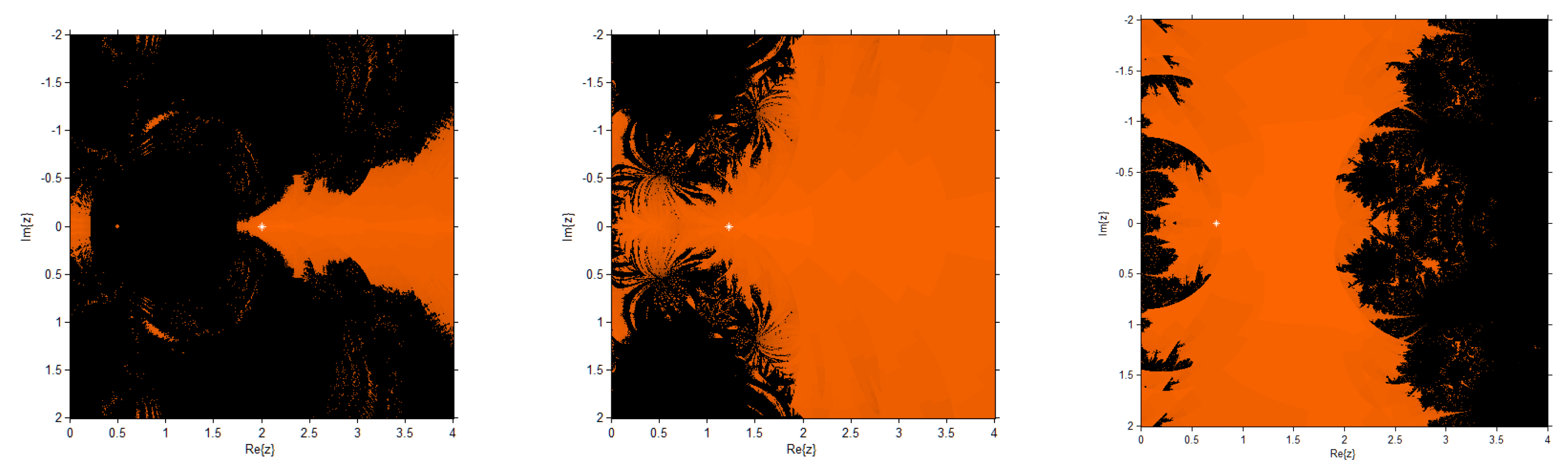
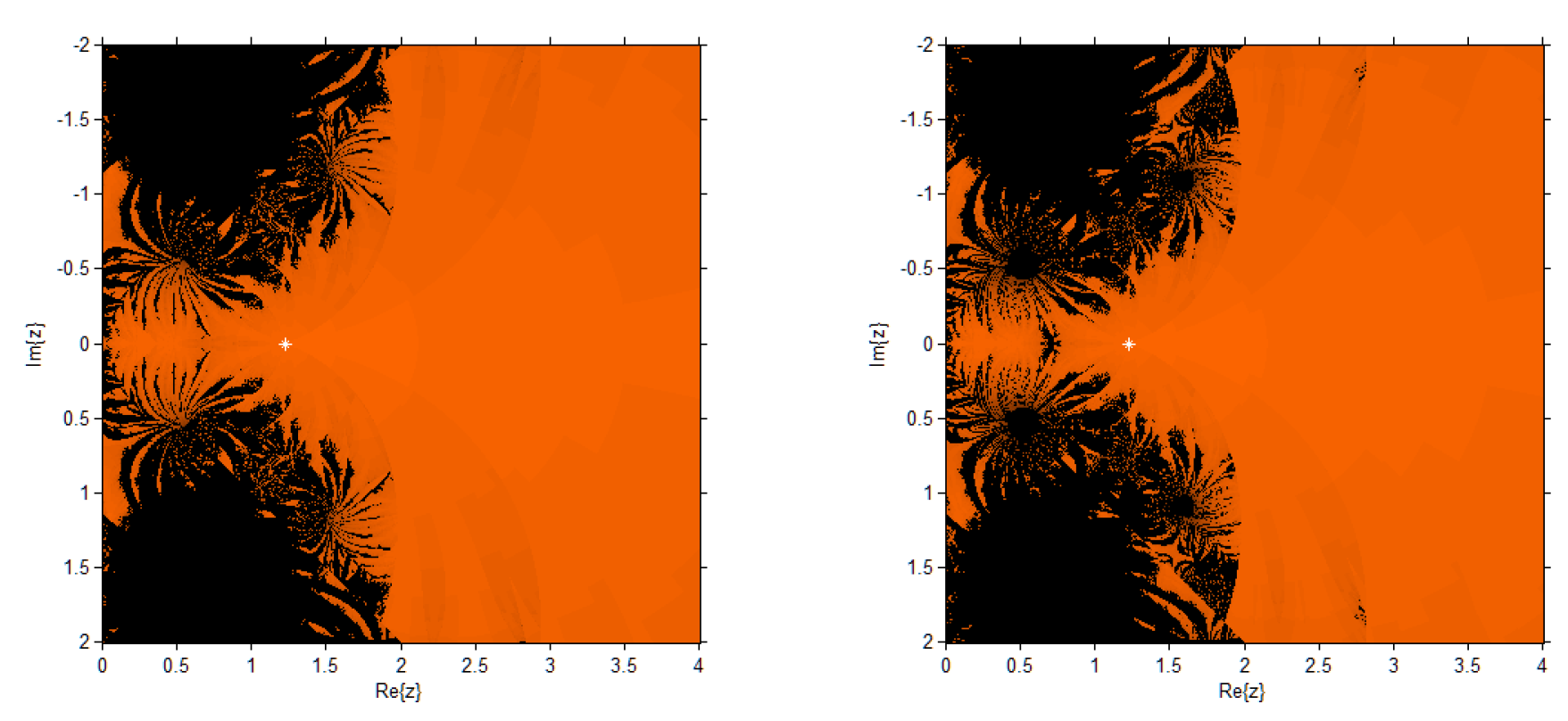
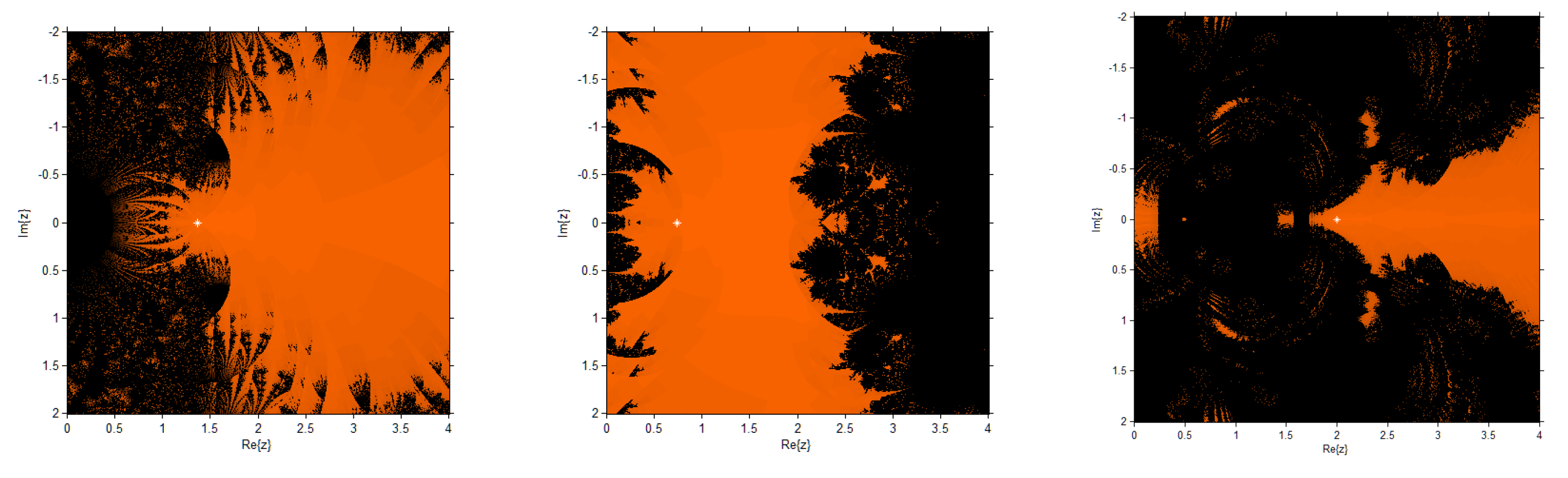
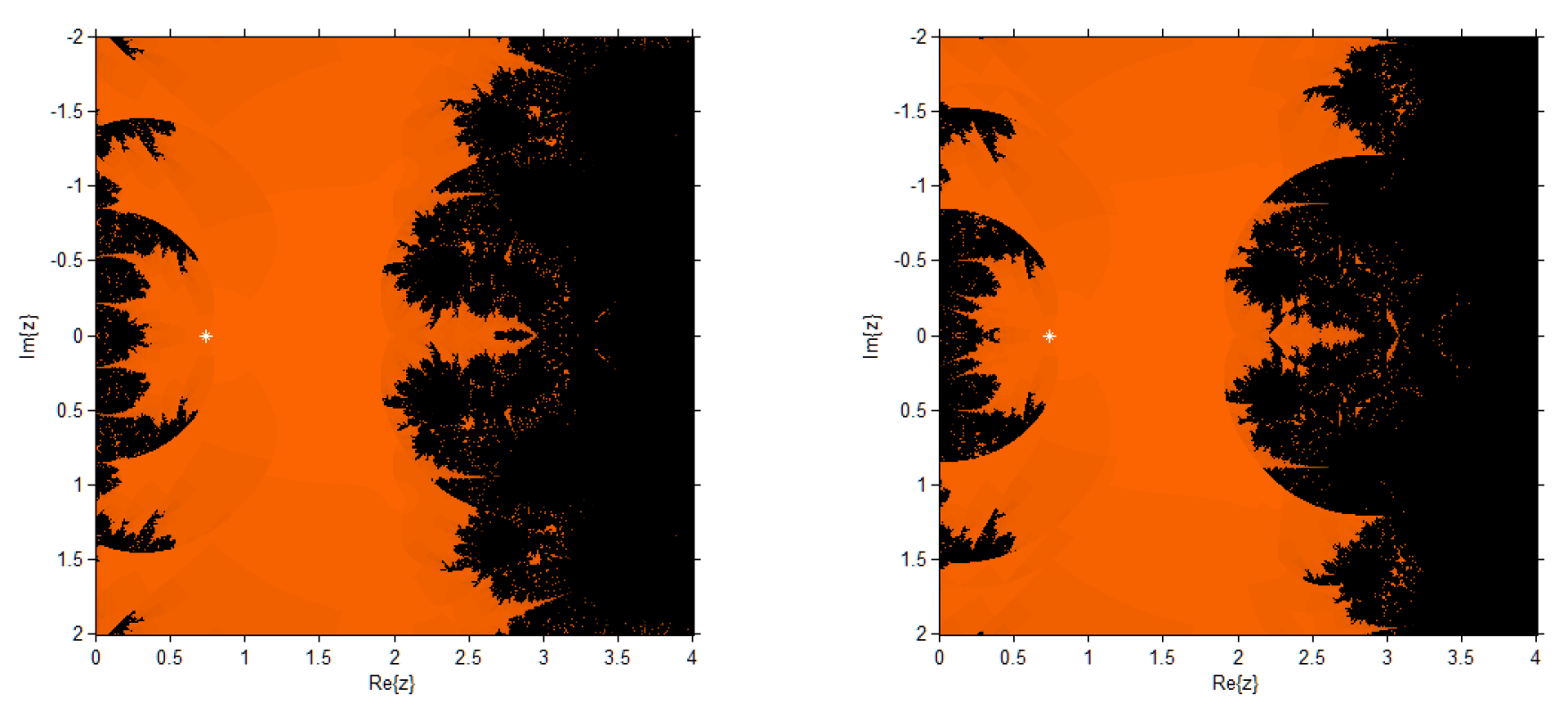
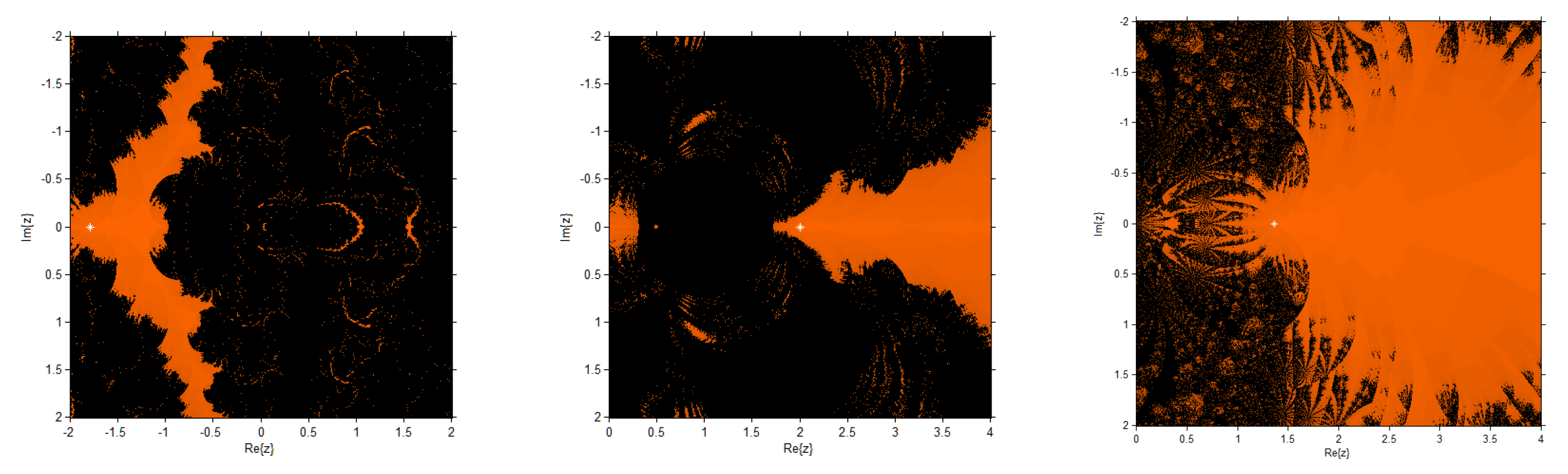
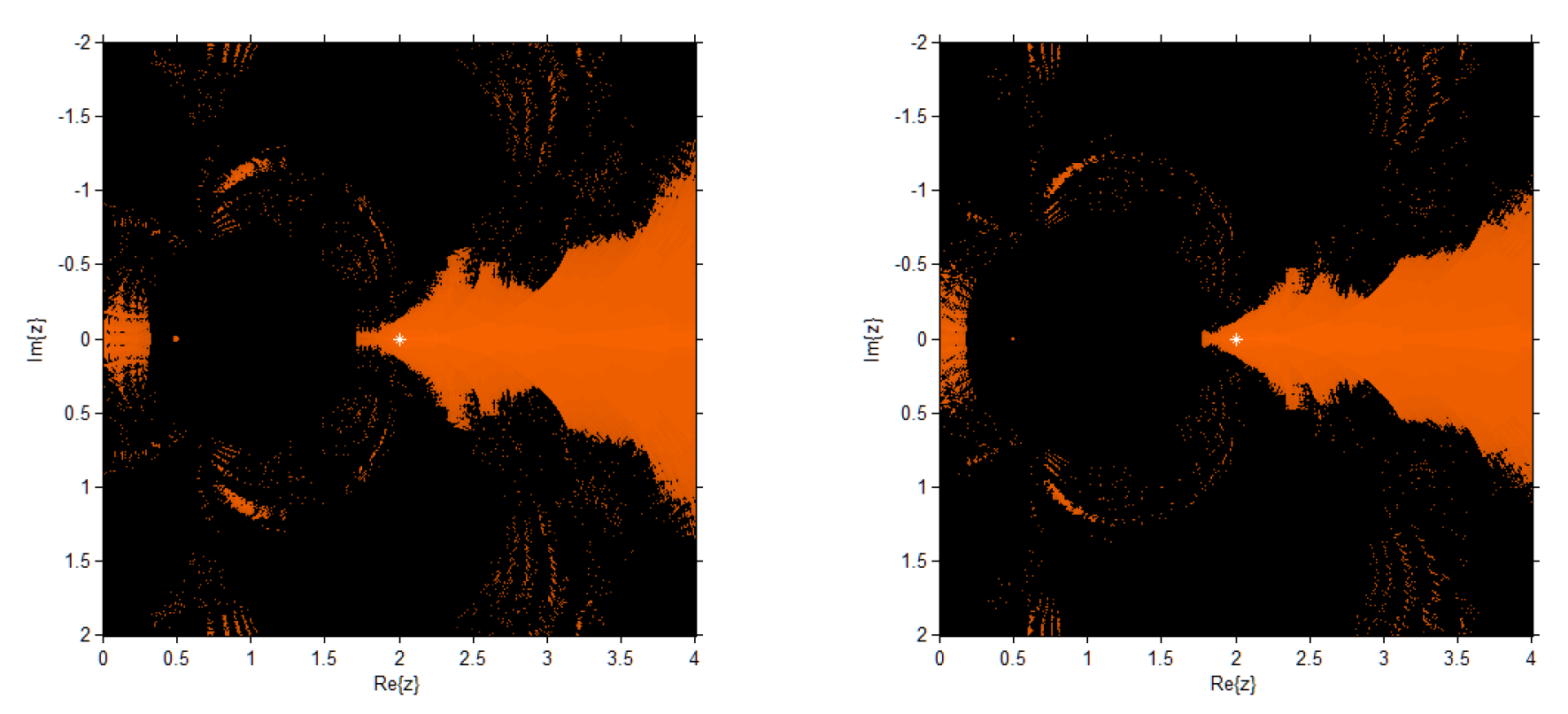
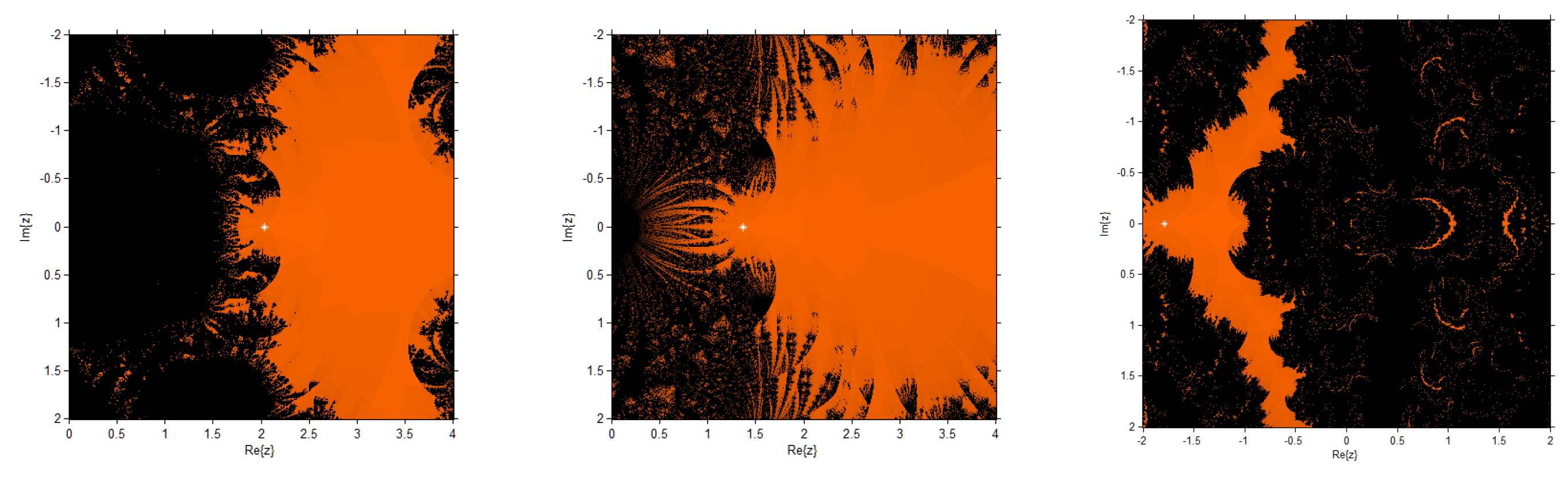
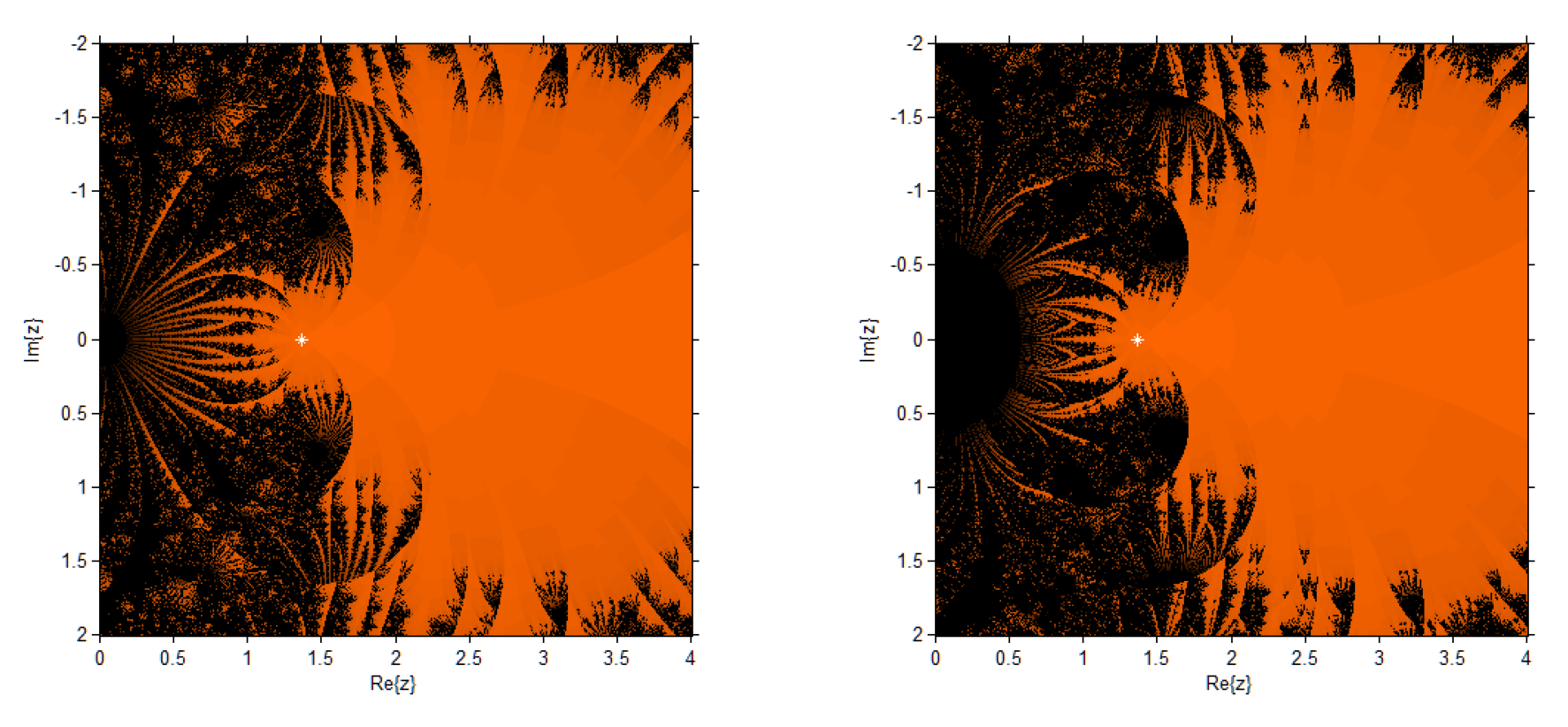
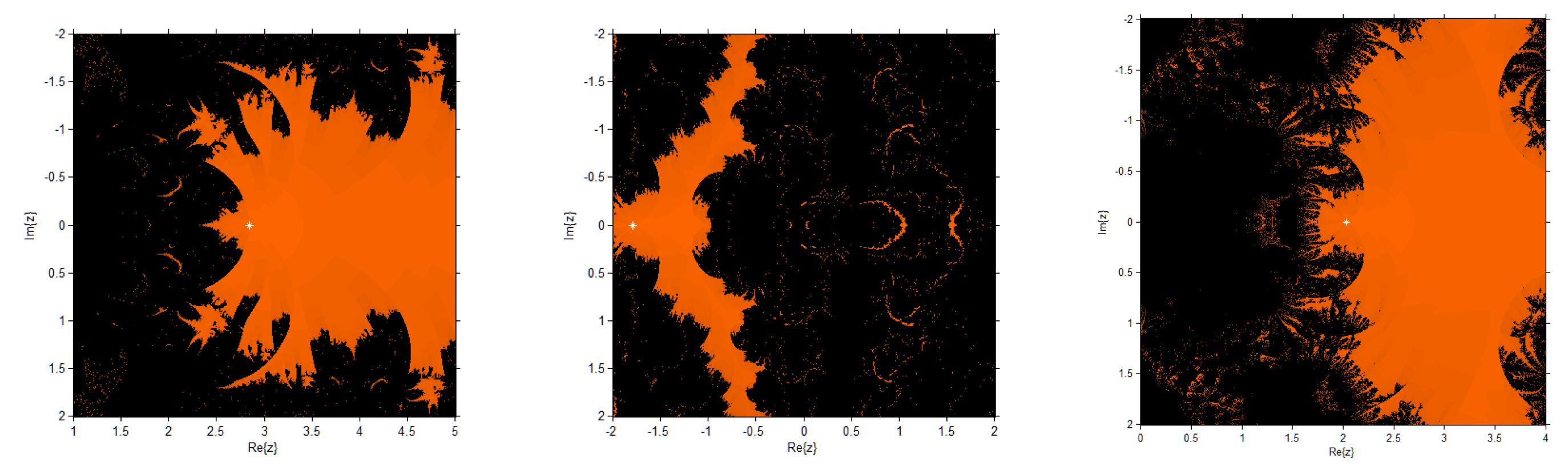
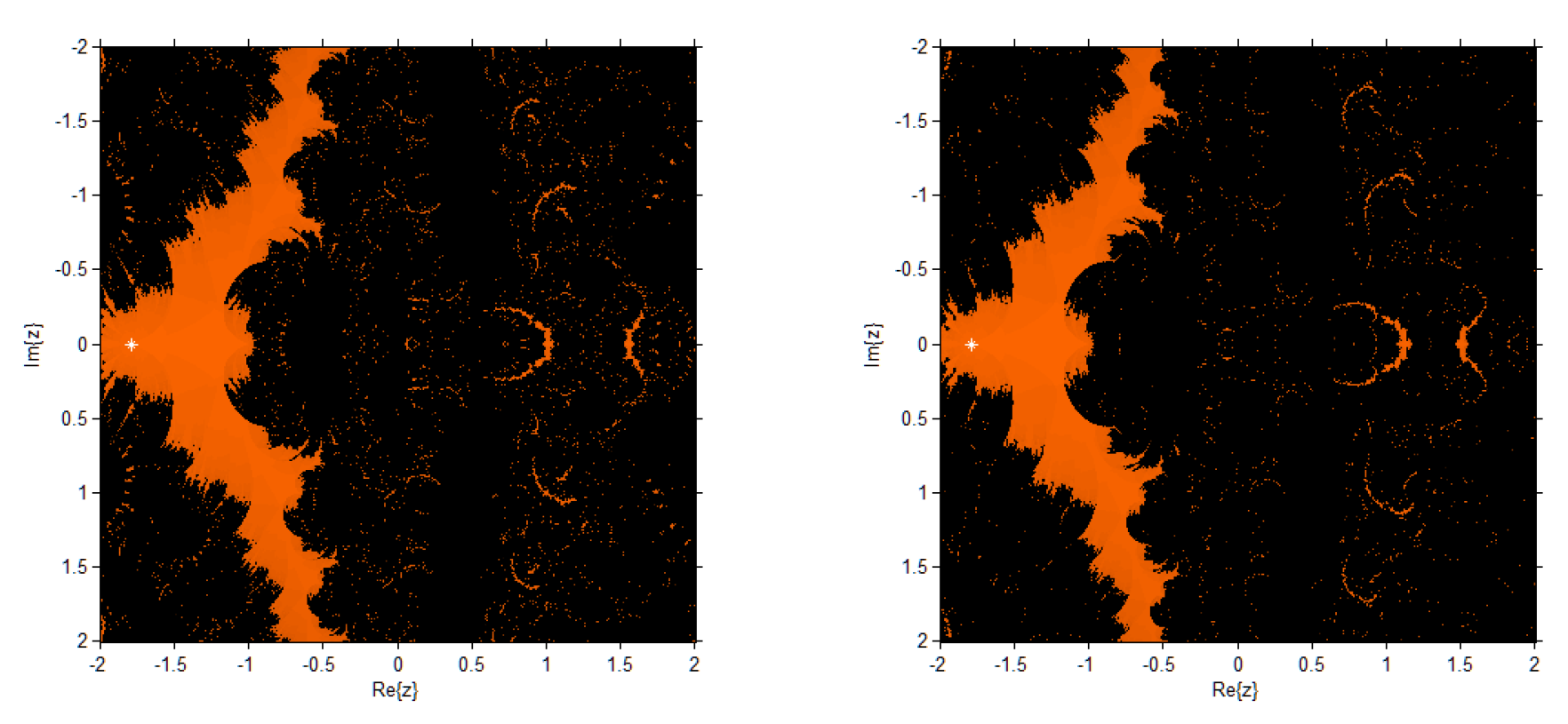
5. Dynamical Analysis
For the sake of stability comparison, we plot the dynamical planes corresponding to each scheme (SM-1, SM-2, SM-3, BM and ZM) for the nonlinear functions
by using the procedure described in [
24]. We draw a mesh of 400 × 400 points such that each point of the mesh is an initial-approximation of the required root of corresponding nonlinear function. The point is orange if the sequence of iteration method converges to the multiple root (with tolerance
) in fewer than 80 iterations and the point is black if the sequence does not converges to the multiple root. The multiple zero is represented by a white star in the figures.
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13 and
Figure 14 show that the basin of attraction drawn in orange is of the multiple zero only (i.e., a set of initial guesses converging to the multiple roots fills all the plotted regions of the complex plane). In general, convergence to other zeros or divergence can appear (referred to as strange stationary points). SM-1 has wider regions of convergence for
as compared to ZM and BM in
Figure 1 and
Figure 2; SM-1 and SM-3 have wider regions of convergence for
as compared to ZM and BM in
Figure 3 and
Figure 4. The convergence region of SM-2 for functions
,
and
is comparable with ZM and BM, as shown in
Figure 5,
Figure 6,
Figure 7 and
Figure 8,
Figure 11 and
Figure 12. For function
in
Figure 9 and
Figure 10, the convergence region of SM-3 is better than ZM and BM. For function
, SM-1 and SM-3 have better convergence regions than ZM and BM, as shown in
Figure 13 and
Figure 14.
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13 and
Figure 14 show that the region in orange is comparable or bigger for the presented methods SM-1, SM-2 and SM-3 than the regions obtained by schemes BM and ZM, which confirms the fast convergence and stability of the proposed schemes.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}