
Derivation of Three-Derivative Two-Step Runge–Kutta Methods


Abstract
:1. Introduction
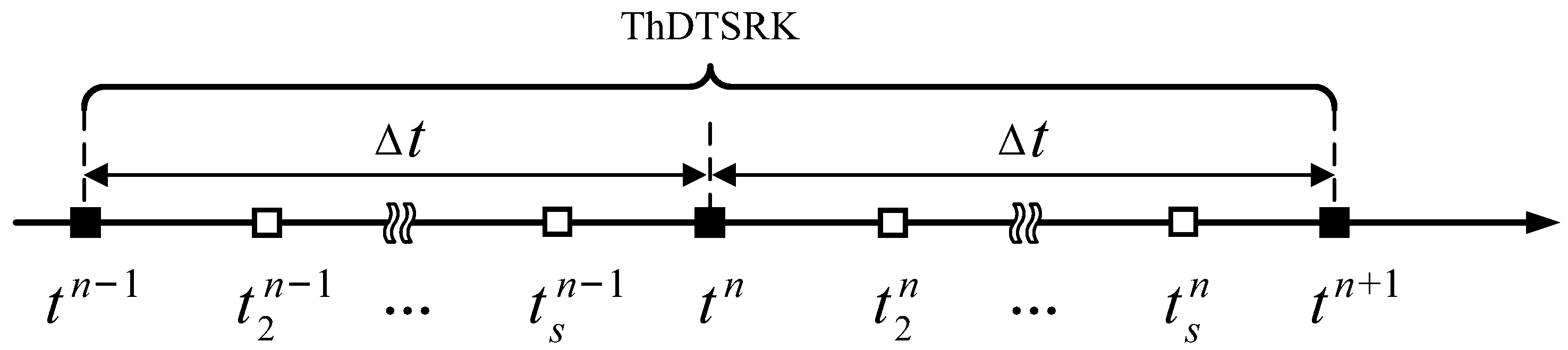
2. Structure of ThDTSRK Methods
3. Order Conditions of ThDTSRK Methods
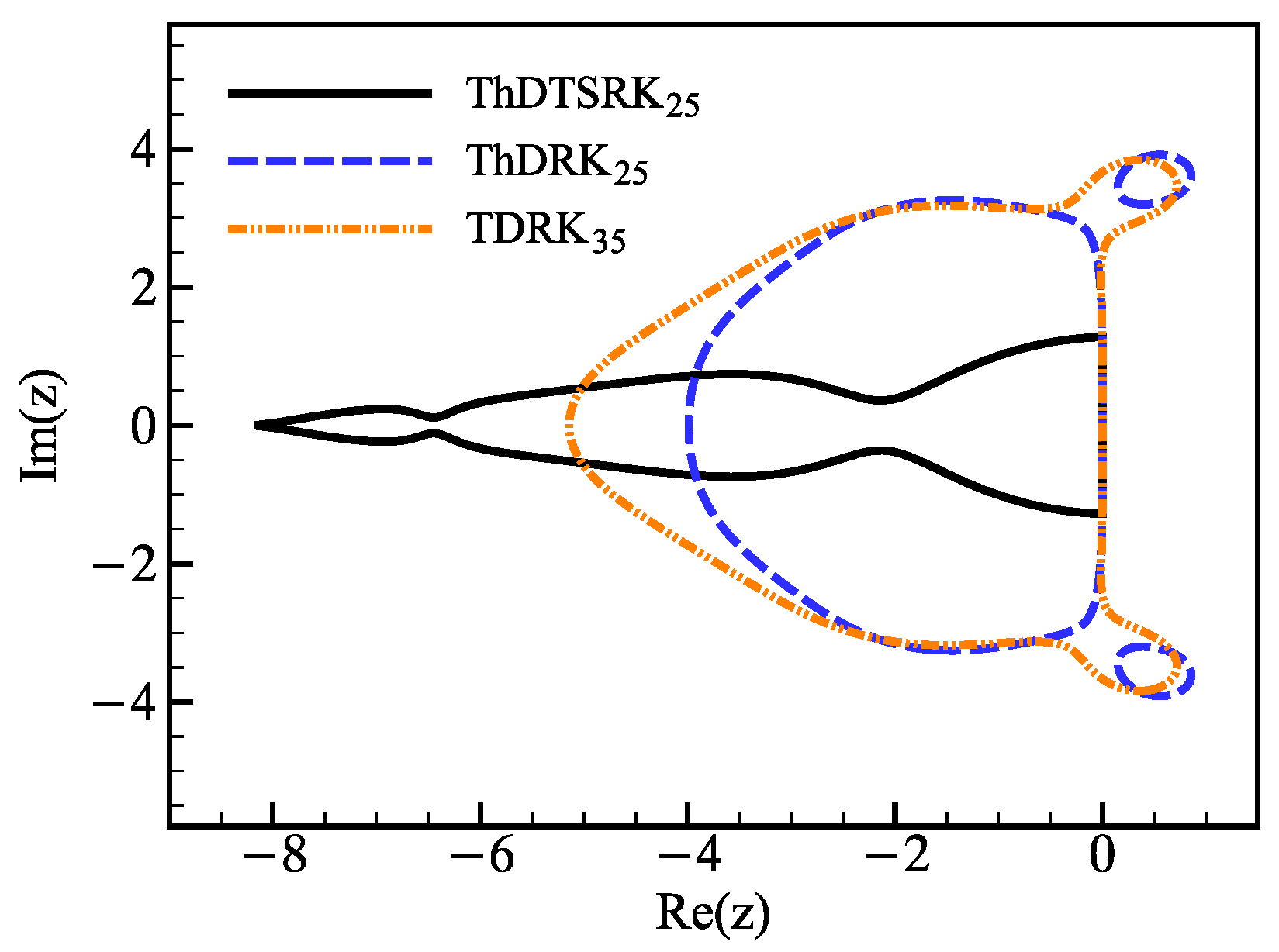
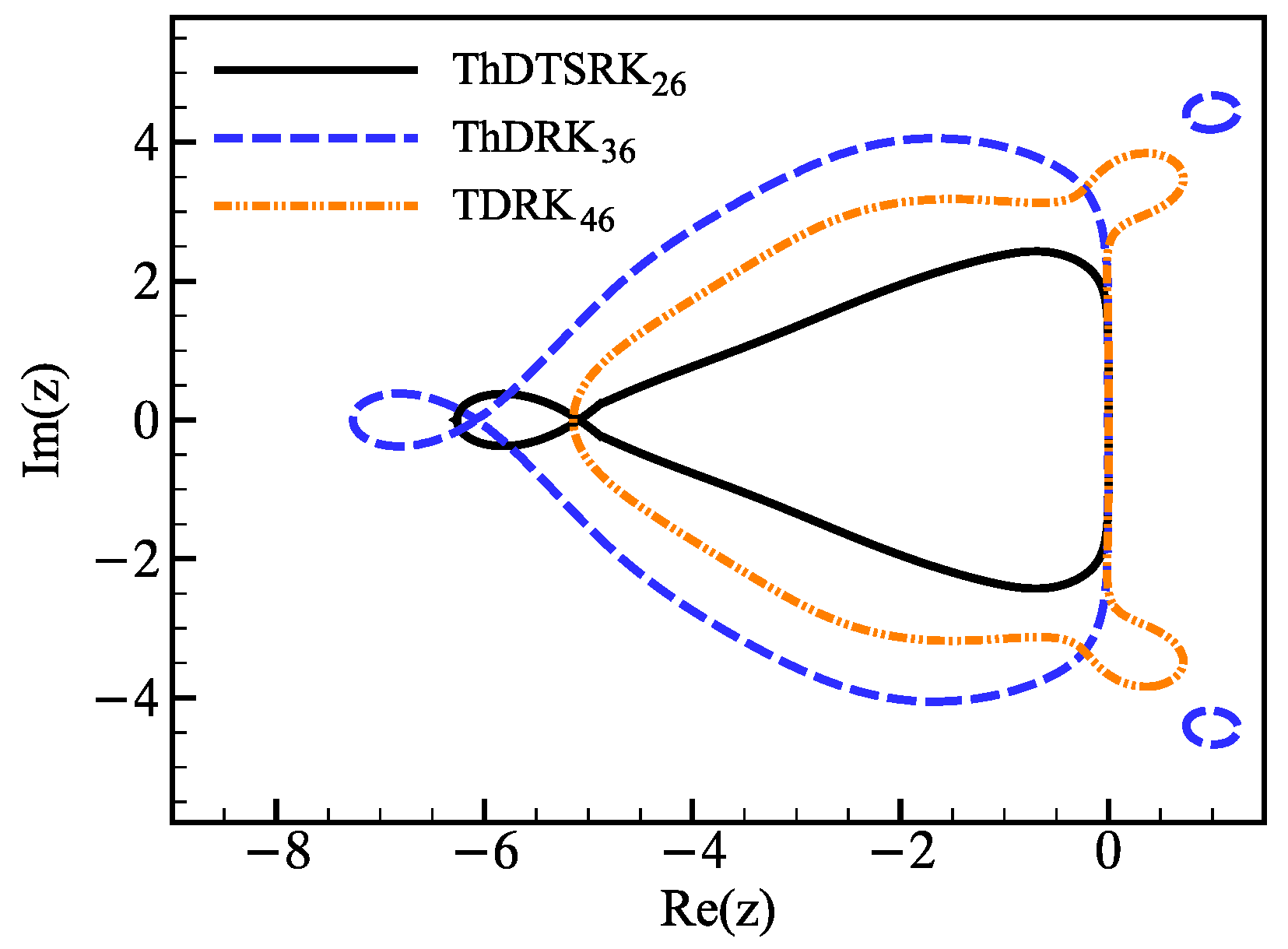
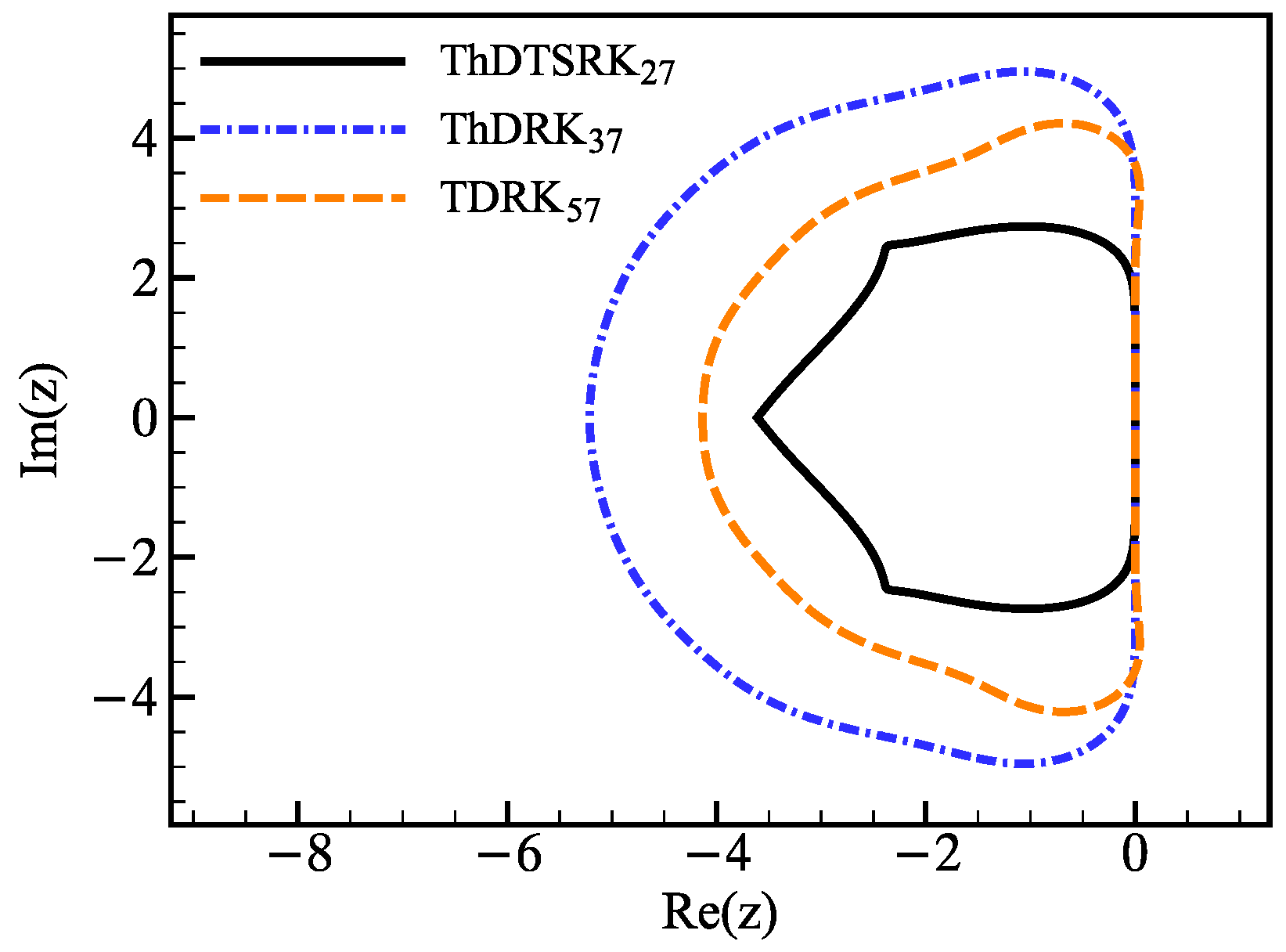
4. Stability Analysis
4.1. A-Stability Property
4.2. Optimal ThDTSRK Schemes
- (1)
- Two-Stage Fifth-Order ThDTSRK Scheme (ThDTSRK)
- (2)
- Two-Stage Sixth-Order ThDTSRK Scheme (ThDTSRK26)
- (3)
- Two-Stage Seventh-Order ThDTSRK Scheme (ThDTSRK27)
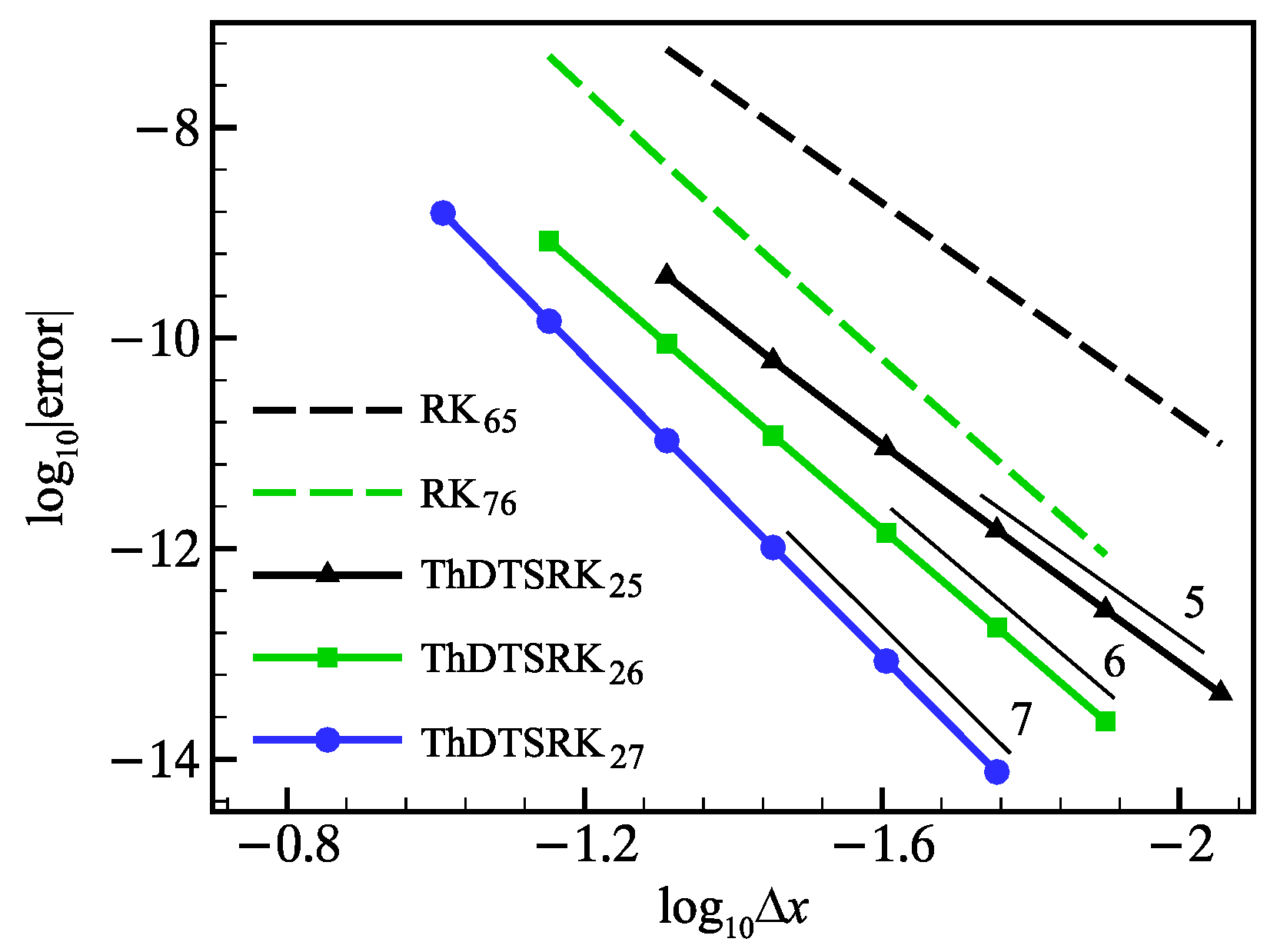
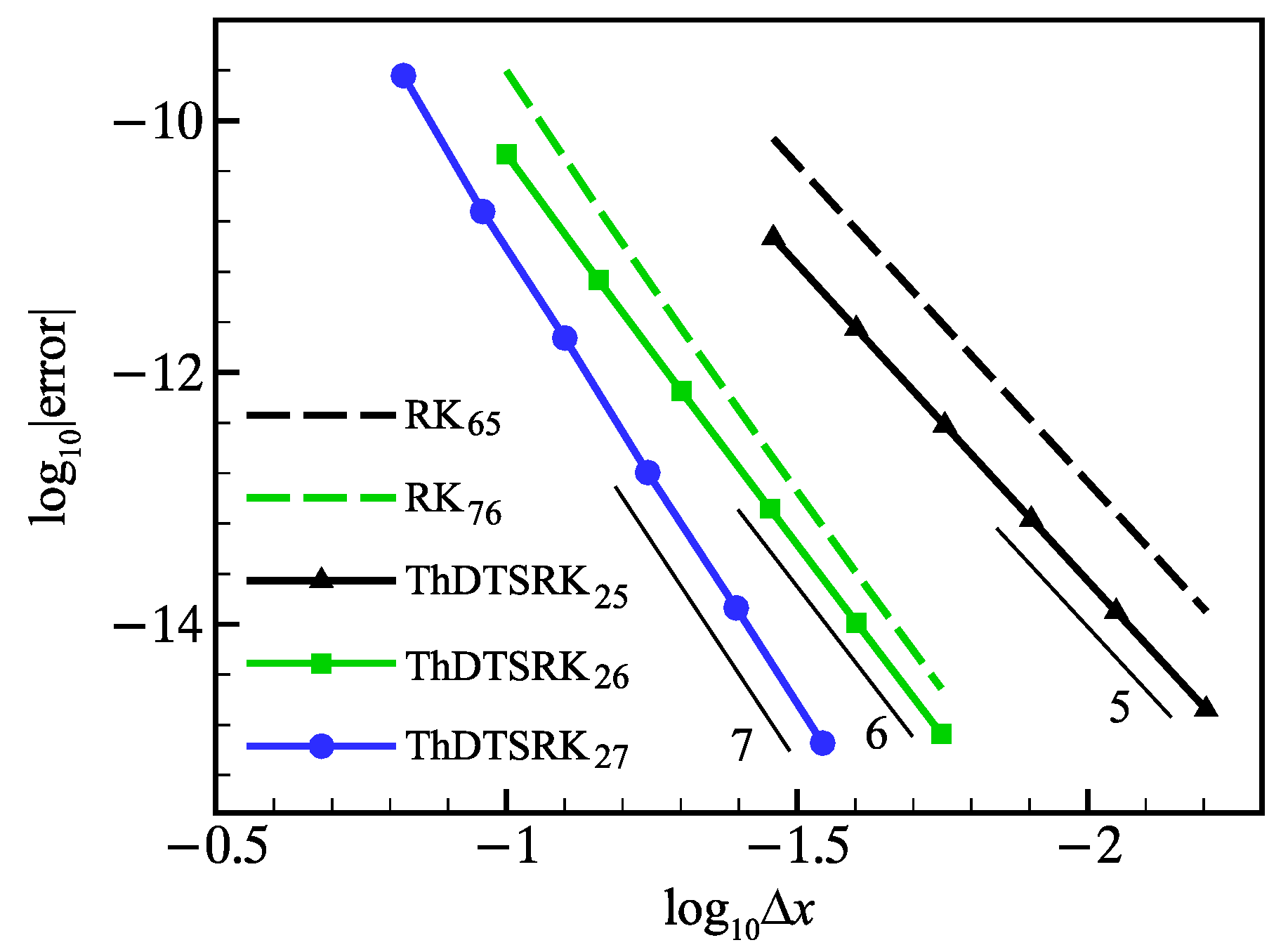
5. Numerical Examples
5.1. Prothero–Robinson Problem
5.2. Kaps Problem
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Order Conditions for ThDTSRK Schemes
| Condition: |
| Terms | ||
| Condition: | ||
| Terms | ||
| Condition: | ||
| Terms: | ||
| Condition: | ||
| Terms: | ||
| Condition: | ||
| Terms: | ||
| Condition: | ||
| Terms: | ||
| Condition: | ||
References
- Dormand, J.R.; Prince, P.J. A family of embedded Runge-Kutta formulae. J. Comput. Appl. Math. 1980, 6, 19–26. [Google Scholar] [CrossRef]
- Kovalnogov, V.N.; Fedorov, R.V.; Karpukhina, T.V.; Simos, T.E.; Tsitouras, C. On Reusing the Stages of a Rejected Runge-Kutta Step. Mathematics 2023, 11, 2589. [Google Scholar] [CrossRef]
- Kovalnogov, V.N.; Fedorov, R.V.; Chukalin, A.V.; Simos, T.E.; Tsitouras, C. Evolutionary Derivation of Runge–Kutta Pairs of Orders 5(4) Specially Tuned for Problems with Periodic Solutions. Mathematics 2021, 9, 2306. [Google Scholar] [CrossRef]
- Verner, J. High-order explicit Runge-Kutta pairs with low stage order. Appl. Numer. Math. 1996, 22, 345–357. [Google Scholar] [CrossRef]
- Qin, X.; Jiang, Z.; Yu, J.; Huang, L.; Yan, C. Strong stability-preserving three-derivative Runge–Kutta methods. Comput. Appl. Math. 2023, 42, 171. [Google Scholar] [CrossRef]
- Wen, J.; Xiao, A.; Huang, C. Highly stable multistep Runge–Kutta methods for Volterra integral equations. Comput. Appl. Math. 2020, 39, 308. [Google Scholar] [CrossRef]
- Moradi, A.; Abdi, A.; Hojjati, G. RK-stable second derivative multistage methods with strong stability preserving based on Taylor series conditions. Comput. Appl. Math. 2023, 42, 193. [Google Scholar] [CrossRef]
- Butcher, J.C. An algebraic theory of integration methods. Math. Comput. 1972, 26, 79–106. [Google Scholar] [CrossRef]
- Butcher, J.C. Trees and numerical methods for ordinary differential equations. Numer. Algor. 2010, 53, 153–170. [Google Scholar] [CrossRef]
- Albrecht, P. The Runge-Kutta theory in a nutshell. SIAM J. Numer. Anal. 1996, 33, 1712–1735. [Google Scholar] [CrossRef]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations; John Wiley & Sons: Hoboken, NJ, USA, 2016; pp. 243–267. [Google Scholar] [CrossRef]
- Butcher, J.C.; Hojjati, G. Second derivative methods with RK stability. Numer. Algor. 2005, 40, 415–429. [Google Scholar] [CrossRef]
- Chan, R.P.; Tsai, A.Y. On explicit two-derivative Runge-Kutta methods. Numer. Algor. 2010, 53, 171–194. [Google Scholar] [CrossRef]
- Turacı, M.Ö.; Öziş, T. Derivation of three-derivative Runge-Kutta methods. Numer. Algor. 2017, 74, 247–265. [Google Scholar] [CrossRef]
- Ketcheson, D.I.; Gottlieb, S.; Macdonald, C.B. Strong stability preserving two-step Runge–Kutta methods. SIAM J. Numer. Anal. 2011, 49, 2618–2639. [Google Scholar] [CrossRef]
- Ökten Turaci, M.; Öziş, T. On explicit two-derivative two-step Runge–Kutta methods. Comput. Appl. Math. 2018, 37, 6920–6954. [Google Scholar] [CrossRef]
- Bresten, C.; Gottlieb, S.; Grant, Z.; Higgs, D.; Ketcheson, D.; Németh, A. Explicit strong stability preserving multistep Runge-Kutta methods. Math. Comput. 2017, 86, 747–769. [Google Scholar] [CrossRef]
- Enright, W. Second derivative multistep methods for stiff ordinary differential equations. SIAM J. Numer. Anal. 1974, 11, 321–331. [Google Scholar] [CrossRef]
- Explicit Three-Derivative Two-Step Runge-Kutta Methods Code. 2023. Available online: https://github.com/aerfa-buaa/Explicit-Three-Derivative-Two-Step-Runge-Kutta-Methods-ThDTSRK (accessed on 1 October 2023).
- Bartoszewski, Z.; Jackiewicz, Z. Construction of two-step Runge-Kutta methods of high order for ordinary differential equations. Numer. Algor. 1998, 18, 51–70. [Google Scholar] [CrossRef]
- Figueroa, A.; Jackiewicz, Z.; Löhner, R. Efficient two-step Runge-Kutta methods for fluid dynamics simulations. Appl. Numer. Math. 2021, 159, 1–20. [Google Scholar] [CrossRef]
- Zorío, D.; Baeza, A.; Mulet, P. An approximate Lax–Wendroff-type procedure for high order accurate schemes for hyperbolic conservation laws. J. Sci. Comput. 2017, 71, 246–273. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| p | Conditions |
|---|---|
| 1 | . |
| 2 | . |
| 3 | , |
| . | |
| 4 | , |
| , , | |
| . | |
| , | |
| 5 | , |
| , , | |
| , , | |
| . | |
| 6 | , |
| , | |
| , | |
| , | |
| , | |
| , | |
| , | |
| , , | |
| , | |
| , | |
| , | |
| . | |
| 7 | , |
| , , | |
| , | |
| , | |
| , | |
| , | |
| , | |
| , | |
| , | |
| , | |
| , | |
| , | |
| . |
| ThDTSRK | ThDTSRK | ThDTSRK | |
| ThDRK | ThDRK | ThDRK | |
| TDRK | TDRK | TDRK | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, X.; Yu, J.; Yan, C. Derivation of Three-Derivative Two-Step Runge–Kutta Methods. Mathematics 2024, 12, 711. https://doi.org/10.3390/math12050711
Qin X, Yu J, Yan C. Derivation of Three-Derivative Two-Step Runge–Kutta Methods. Mathematics. 2024; 12(5):711. https://doi.org/10.3390/math12050711
Chicago/Turabian StyleQin, Xueyu, Jian Yu, and Chao Yan. 2024. "Derivation of Three-Derivative Two-Step Runge–Kutta Methods" Mathematics 12, no. 5: 711. https://doi.org/10.3390/math12050711