
Periodic Behaviour of HIV Dynamics with Three Infection Routes


Abstract
:1. Introduction
2. Mathematical Model for HIV Dynamics
3. Autonomous System
3.1. Basic Results
3.2. Basic Reproduction Number and Equilibria of the Dynamics
3.3. Global Analysis
4. Variable Environment and Periodic Solution
4.1. Virus-Free Periodic Solution
- .
- .
- .
4.2. Virus-Infected Periodic Solution
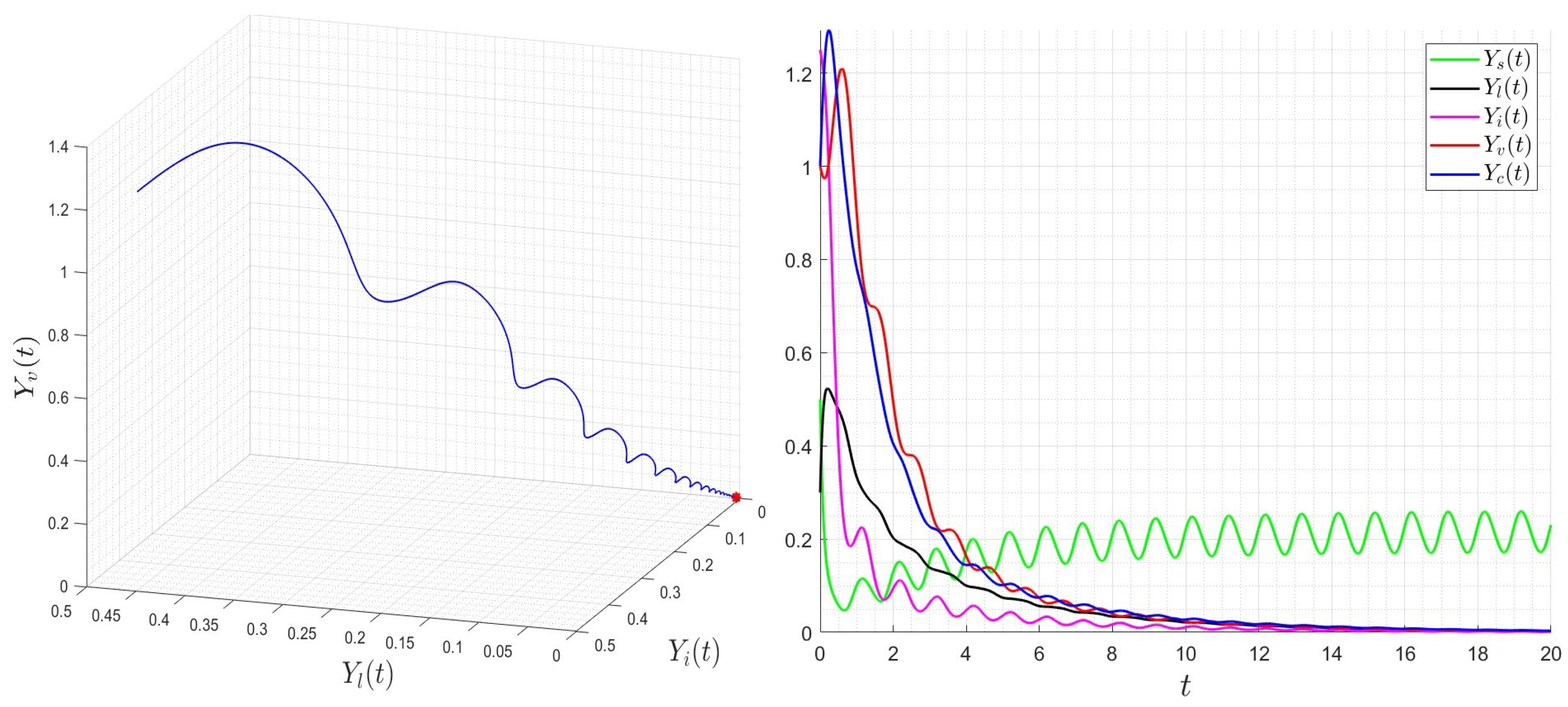
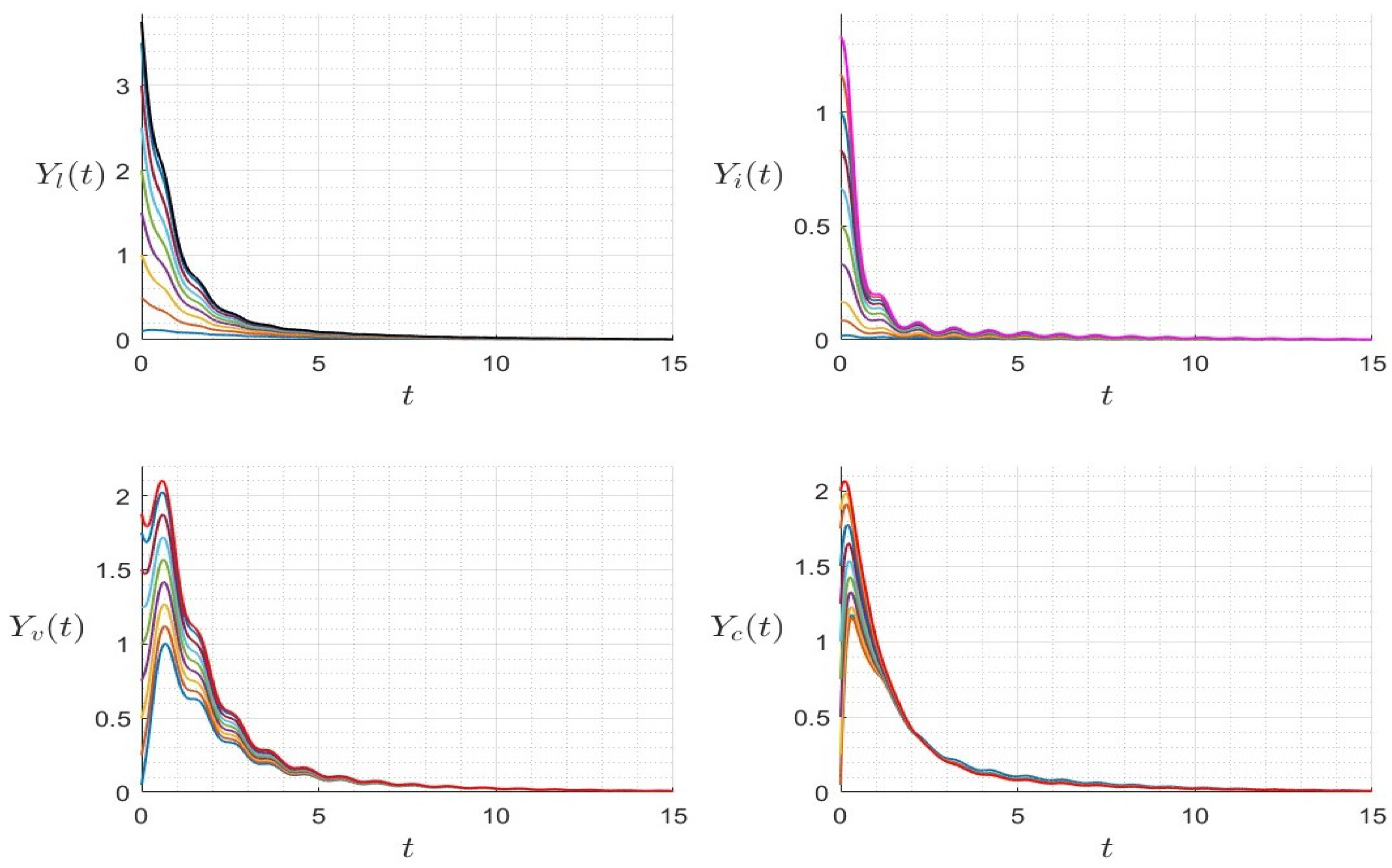
5. Numerical Examples
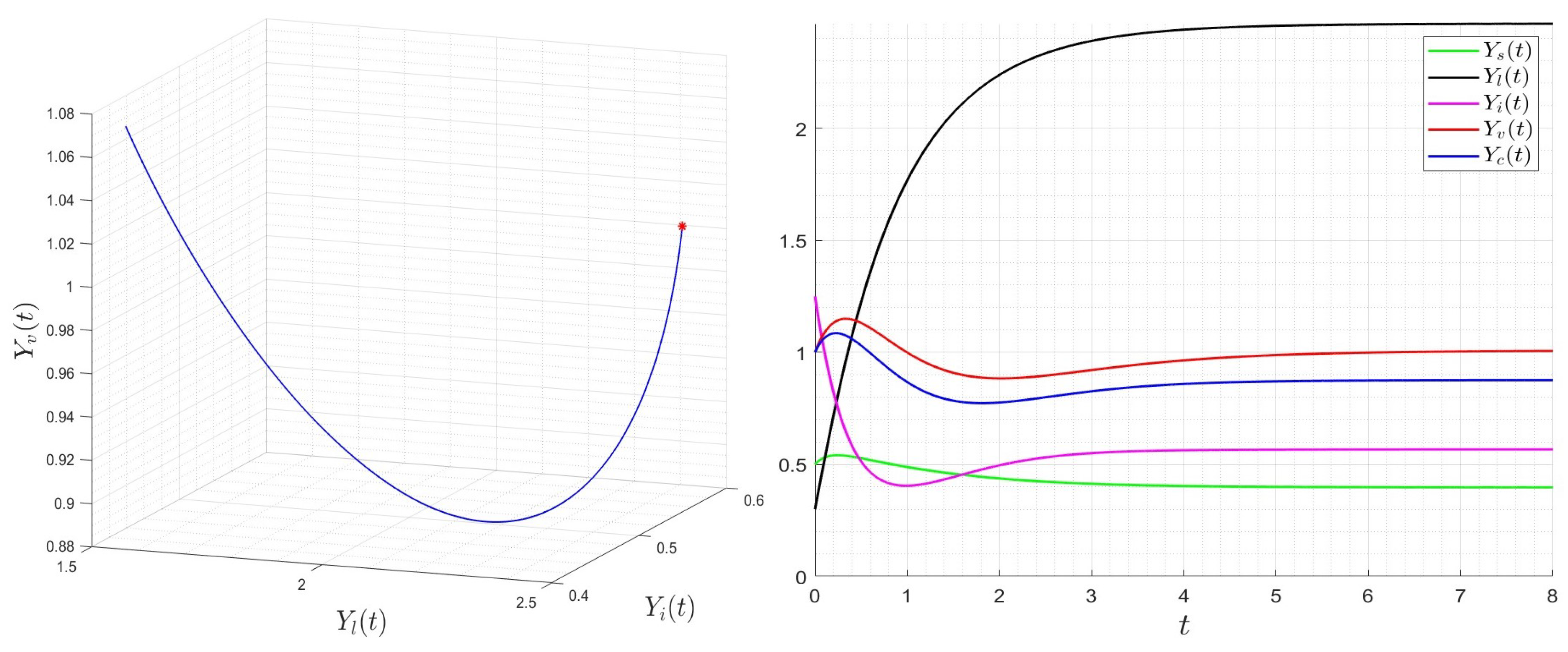
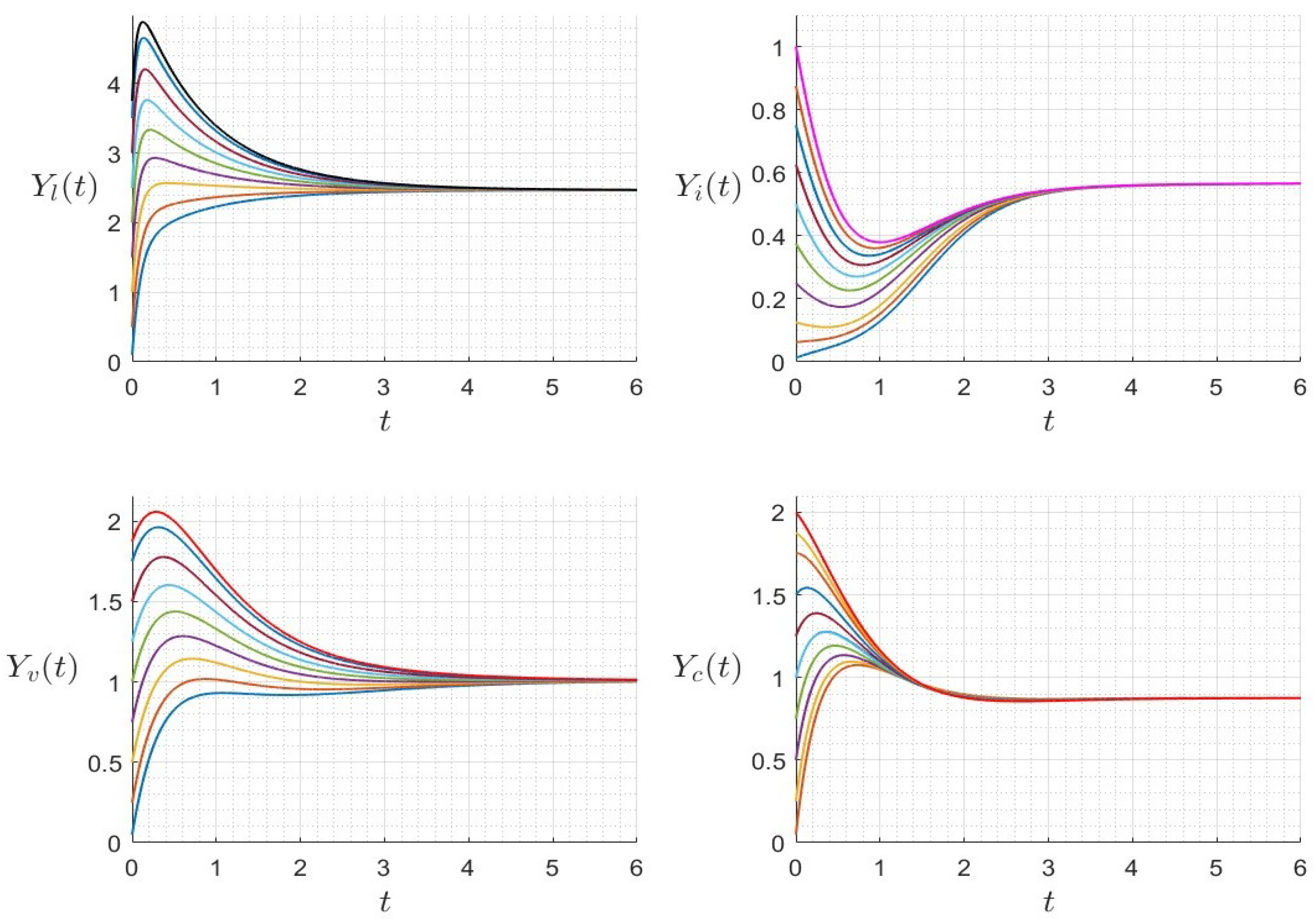
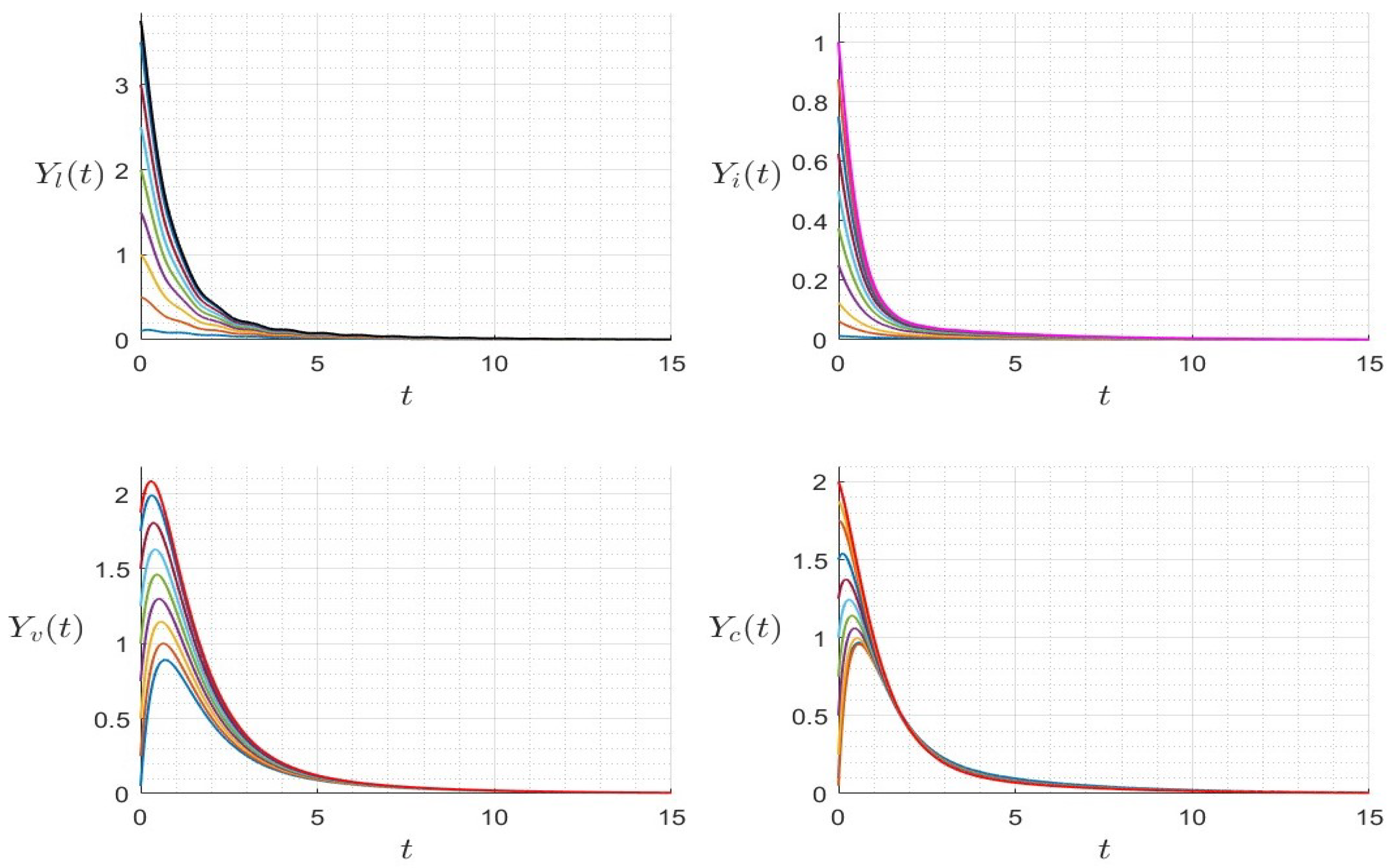
5.1. Totally Fixed Environment
5.2. Variable Contact Rates
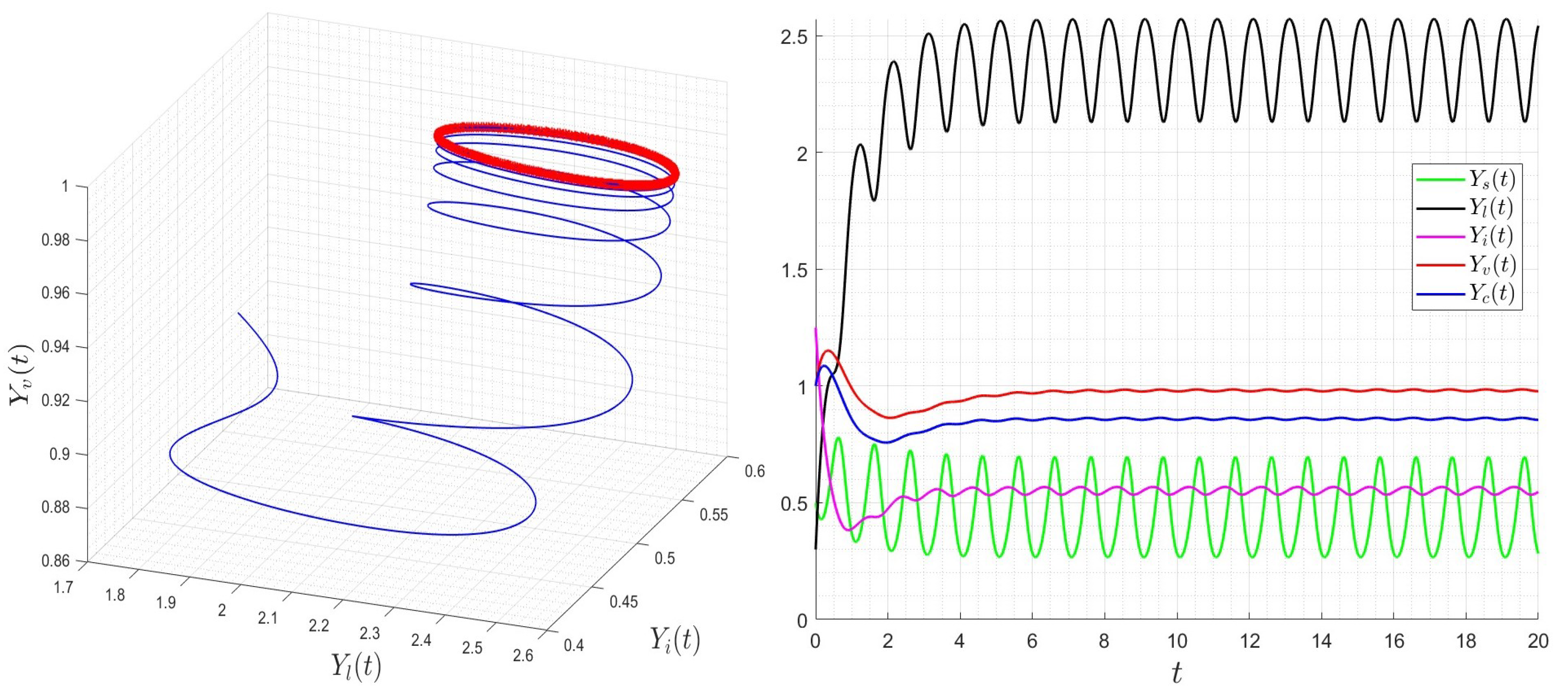
5.3. Totally Variable Environment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Perelson, A.S.; Neumann, A.U.; Markowitz, M.; Leonard, J.M.; Ho, D.D. HIV-1 dynamics in vivo: Virion clearance rate, infected cell life-span, and viral generation time. Science 1996, 271, 1582–1586. [Google Scholar] [CrossRef] [PubMed]
- Nowak, M.A.; Bonhoeffer, S.; Shaw, G.M.; May, R.M. Anti-viral Drug Treatment: Dynamics of Resistance in Free Virus and Infected Cell Populations. J. Theor. Biol. 1997, 184, 203–217. [Google Scholar] [CrossRef] [PubMed]
- Perelson, A.S.; Essunger, P.; Cao, Y.; Vesanen, M.; Hurley, A.; Saksela, K.; Markowitz, M. Decay characteristics of HIV-1-infected compartments during combination therapy. Nature 1997, 387, 188–191. [Google Scholar] [CrossRef] [PubMed]
- De Boer, R.; Perelson, A. Target Cell Limited and Immune Control Models of HIV Infection: A Comparison. J. Theor. Biol. 1998, 190, 201–214. [Google Scholar] [CrossRef] [PubMed]
- Wodarz, D.; Lloyd, A.L.; Jansen, V.A.; Nowak, M.A. Dynamics of Macrophage and T Cell Infection by HIV. J. Theor. Biol. 1999, 196, 101–113. [Google Scholar] [CrossRef] [PubMed]
- Bajaria, S.H.; Webb, G.; Kirschner, D.E. Predicting differential responses to structured treatment interruptions during HAART. Bull. Math. Biol. 2004, 66, 1093–1118. [Google Scholar] [CrossRef] [PubMed]
- Elaiw, A.; AlShamrani, N. Stability of a general CTL-mediated immunity HIV infection model with silent infected cell-to-cell spread. Adv. Differ. Equ. 2020, 2020, 335. [Google Scholar] [CrossRef]
- AlShamrani, N. Stability of a general adaptive immunity HIV infection model with silent infected cell-to-cell spread. Chaos Solitons Fractals 2021, 150, 110422. [Google Scholar] [CrossRef]
- Alsahafi, S.; Woodcock, S. Exploring HIV Dynamics and an Optimal Control Strategy. Mathematics 2022, 10, 749. [Google Scholar] [CrossRef]
- Stengel, R.F. Mutation and control of the human immunodeficiency virus. Math. Biosci. 2008, 213, 93–102. [Google Scholar] [CrossRef]
- Starkov, K.E.; Kanatnikov, A.N. Eradication Conditions of Infected Cell Populations in the 7-Order HIV Model with Viral Mutations and Related Results. Mathematics 2021, 9, 1862. [Google Scholar] [CrossRef]
- AlShamrani, N.H.; Halawani, R.H.; Shammakh, W.; Elaiw, A.M. Global Properties of HIV-1 Dynamics Models with CTL Immune Impairment and Latent Cell-to-Cell Spread. Mathematics 2023, 11, 3743. [Google Scholar] [CrossRef]
- Xiao, D. Dynamics and bifurcations on a class of population model with seasonal constant-yield harvesting. Discret. Contin. Dyn. Syst. -B 2016, 21, 699–719. [Google Scholar] [CrossRef]
- Ibrahim, M.A.; Dénes, A. Stability and Threshold Dynamics in a Seasonal Mathematical Model for Measles Outbreaks with Double-Dose Vaccination. Mathematics 2023, 11, 1791. [Google Scholar] [CrossRef]
- Bacaër, N.; Guernaoui, S. The epidemic threshold of vector-borne diseases with seasonality. J. Math. Biol. 2006, 53, 421–436. [Google Scholar] [CrossRef]
- Bacaër, N. Approximation of the basic reproduction number R0 for vector-borne diseases with a periodic vector population. Bull. Math. Biol. 2007, 69, 1067–1091. [Google Scholar] [CrossRef]
- Ibrahim, M.A.; Dénes, A. A mathematical model for Lassa fever transmission dynamics in a seasonal environment with a view to the 2017–20 epidemic in Nigeria. Nonlinear Anal. Real World Appl. 2021, 60, 103310. [Google Scholar] [CrossRef]
- El Hajji, M.; Alshaikh, D.M.; Almuallem, N.A. Periodic behaviour of an epidemic in a seasonal environment with vaccination. Mathematics 2023, 11, 2350. [Google Scholar] [CrossRef]
- El Hajji, M.; Alnjrani, R.M. Periodic Trajectories for HIV Dynamics in a Seasonal Environment With a General Incidence Rate. Int. J. Anal. Appl. 2023, 21, 96. [Google Scholar] [CrossRef]
- El Hajji, M. Periodic solutions for chikungunya virus dynamics in a seasonal environment with a general incidence rate. AIMS Math. 2023, 8, 24888–24913. [Google Scholar] [CrossRef]
- Diekmann, O.; Heesterbeek, J. On the definition and the computation of the basic reproduction ratio R0 in models for infectious diseases in heterogeneous populations. J. Math. Biol. 1990, 28, 365–382. [Google Scholar] [CrossRef]
- Den Driessche, P.V.; Watmough, J. Reproduction Numbers and Sub-Threshold Endemic Equilibria for Compartmental Models of Disease Transmission. Math. Biosci. 2002, 180, 29–48. [Google Scholar] [CrossRef]
- Hurwitz, A. Ueber die Bedingungen, unter welchen eine Gleichung nur Wurzeln mit negativen reellen Theilen besitzt. (English translation “On the conditions under which an equation has only roots with negative real parts” by H. G. Bergmann in Selected Papers on Mathematical Trends in Control Theory R. Bellman and R. Kalaba Eds. New York: Dover, 1964; pp. 70–82). Math. Ann. 1895, 46, 273–284. [Google Scholar]
- Routh, E.J. A Treatise on the Stability of a Given State of Motion: Particularly Steady Motion; Macmillan: New York, NY, USA, 1877. [Google Scholar]
- El Hajji, M. Mathematical modeling for anaerobic digestion under the influence of leachate recirculation. AIMS Math. 2023, 8, 30287–30312. [Google Scholar] [CrossRef]
- LaSalle, J. The Stability of Dynamical Systems; SIAM: Philadelphia, PA, USA, 1976. [Google Scholar]
- Alshehri, A.; El Hajji, M. Mathematical study for Zika virus transmission with general incidence rate. AIMS Math. 2022, 7, 7117–7142. [Google Scholar] [CrossRef]
- Frobenius, G. Uber Matrizen aus Nicht Negativen Elementen; Sitzungsberichte Preussische Akademie der Wissenschaft: Berlin, Germany, 1912; pp. 456–477. [Google Scholar]
- Zhang, F.; Zhao, X. A periodic epidemic model in a patchy environment. J. Math. Anal. Appl. 2007, 325, 496–516. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, X. Threshold dynamics for compartmental epidemic models in periodic environments. Dynam. Differ. Equ. 2008, 20, 699–717. [Google Scholar] [CrossRef]
- Zhao, X. Dynamical Systems in Population Biology; CMS Books in Mathematics (CMSBM); Springer: New York, NY, USA, 2003; Volume 16. [Google Scholar]
- Ma, J.; Ma, Z. Epidemic threshold conditions for seasonally forced SEIR models. Math. Biosci. Eng. 2006, 3, 161–172. [Google Scholar] [CrossRef]
- Zhang, T.; Teng, Z. On a nonautonomous SEIRS model in epidemiology. Bull. Math. Biol. 2007, 69, 2537–2559. [Google Scholar] [CrossRef]
- Guerrero-Flores, S.; Osuna, O.; de Leon, C.V. Periodic solutions for seasonal SIQRS models with nonlinear infection terms. Electron. J. Differ. Equations 2019, 2019, 1–13. [Google Scholar]
- Nakata, Y.; Kuniya, T. Global dynamics of a class of SEIRS epidemic models in a periodic environment. J. Math. Anal. Appl. 2010, 363, 230–237. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| Susceptible cells | |
| Latently infected cells | |
| Productively infected cells | |
| Free virions | |
| B cells and cytotoxic T lymphocytes | |
| Parameter | Description |
| Generation rate of Healthy (susceptible) cells | |
| Periodic contact rate between and | |
| Periodic contact rate between and | |
| Periodic contact rate between and | |
| Mortality rate of Healthy (susceptible) cells | |
| Mortality rate of latently infected cells | |
| Mortality rate of productively infected cells | |
| Mortality rate of free virions (HIV-1 particles) | |
| Mortality rate of B cells and cytotoxic T lymphocytes (CTLs) | |
| Conversion rate of cells into cells | |
| Generated rate of HIV from cells | |
| B-cell immune rate produced by cells | |
| Neutralization rate | |
| Impairment rate |
| 10 | 2 | 1 | 4 | 2 | 1 | |||||||||
| 10 | 2 | 1 | 4 | 2 | 1 | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Hajji, M.; Alnjrani, R.M. Periodic Behaviour of HIV Dynamics with Three Infection Routes. Mathematics 2024, 12, 123. https://doi.org/10.3390/math12010123
El Hajji M, Alnjrani RM. Periodic Behaviour of HIV Dynamics with Three Infection Routes. Mathematics. 2024; 12(1):123. https://doi.org/10.3390/math12010123
Chicago/Turabian StyleEl Hajji, Miled, and Rahmah Mohammed Alnjrani. 2024. "Periodic Behaviour of HIV Dynamics with Three Infection Routes" Mathematics 12, no. 1: 123. https://doi.org/10.3390/math12010123