1. Introduction
In the last decades, analysis of the Hertzian contact and electromagnetic actuation (EA) has been caried out in several studies since these are present in various engineering systems such as railway wheel contact [
1], the automotive sector [
2], gear drive [
3], energy dissipation in mechanical systems, and in mechanisms transforming movements of rotations or translations [
4]. EA are used in some engineering applications such as hydraulic valves, small heart pumps, electric door, power relays, etc.
Some studies are devoted to the problem of resonances (principal, subharmonic, or superharmonic). Mann et al. [
5] investigated the dynamic behavior of a pendulum with finite time impact events that is modeled by Hertz’s contact law. Periodic, subharmonic, quasi-periodic, and chaotic behavior are experimentally and numerically explored. Ma et al. [
6] explored Hertzian contact problem of a dynamic response for a spherical plane contact interface with contact loss. The clearance-type nonlinearity is given by the contact loss with harmonic balance approximation. Liaudet and Sabot [
7] considered the principal, subharmonic, and superharmonic resonances for the case of a loaded sphere-plane Hertzian contact. Also, the classical contact problem of normal contact between a rigid sphere and elastic half-space is examined by Popov [
8]. An exact solution of this problem in the framework of the half-space approximation is obtained and the deformations in an elastic half-space are given by the stress activity upon its surface.
The Hertzian distribution was assumed by Axinte [
9] for the normal surface contact load over a circular contact area. The rail-wheel contact problems have been analyzed by means of the three-dimensional finite element models. The bodies of the contact problem are the standard rail UIC60 and the standard wheel UICORE. Liaudet and Rigaud [
10] proposed a numerical procedure based on shooting method and multiple scale method and then experimental technique in the study of superharmonic resonance for an impacting Hertzian oscillator. The practical way for controlling the vibroimpact dynamics of a Hertzian contact forced oscillator is the introduction of a fast harmonic base displacement, as showed by Bichri et al. [
11], which is generally around some microns. Different aspects of vibroimpact dynamics in a forced Hertzian contact oscillator such as the effect of time delay, control of a forced impact Hertzian contact near resonances [
12], contact stiffness modulation in contact-mode atomic force microscopy [
13], and the effect of EA on contact loss in a Hertzian contact oscillator [
14] are intensively investigated.
Belhaq et al. [
15] considered the effect of EAs on the dynamics of a periodically excited cantilever beam, numerically by means of finite element method, analytically based on a perturbation analysis and experimentally using a test rig. The force induced by the EA lead to a softening behavior into the system. The role of a high frequency AC of an EA and the dynamics of an excited cantilever beam is explored by Bichri et al. [
16] by means of analytical and numerical procedures near the primary resonance. Pereira et al. [
17] applied EA to a rotating machine on the learning position, and a proportional derivative controller is used for deriving the desired control laws. The Timoshenko beam theory and finite elements method are considered.
To enhance the actuation performance controlled by a harmonic input signal, Zhang et al. [
18] proposed a novel bistable nonlinear EA with elastic boundary. The bifurcation features have been derived in terms of the inclined spring stiffness, the input signal frequency and amplitude. The effect of nonlinear actuator dynamics and an aeroelastic simulation model of a flexible wing with control surface are examined by Tang et al. [
19]. Zhang and Li [
20] proposed a compound scheme based on an improved active disturbance controller and nonlinear compensation for an electromechanical actuator system. The Lu Gre model and hysteresis inverse model are used to compensate for the friction and backlash phenomenon. Simulation and experiment are presented to validate the effectiveness of the proposed method.
The multiple scale method with the force-deflection characteristic approximated by a third order Taylor series expansion is proposed by Xiao et al. [
21]. Then, harmonic balance method is employed to determine the natural frequency for free vibrations of an elastic body by interaction of a mass with a Hertzian contact stiffness. The Hertzian contact given by a dry contact between a rigid flat surface and elastic cylinder is considered by Ali [
22]. The two-dimensional numerical simulation on the subsurface stress field in Hertzian contact under pure sliding condition for different speeds and coefficients of friction is studied applying normal load and angular speed for the cylinder. Quazi et al. [
23] proposed a strip-based local approach to extend the FASTSIM algorithm to non-elliptical contact cases. Different settings for the traction bound are explored to determine their influence on the contact stresses, creep forces, and the limits of the saturation zone in the case of wheel-rail contact. The absolute error in the normalized creep forces is used as the quantity of interest and found to be consistent with other known results. Ciulli et al. [
24] compared the results obtained by theoretical and finite element analysis of the point contact of non-conformal and conformal pairs made of spheres, caps, and spherical seats. The displacement and force relation were investigated by varying the geometrical parameters, the materials, the boundary conditions and the friction coefficient.
Constandinou et al. [
25] established that in the case of multi-spherical approach, there exist two sources for error directly affecting the normal contact forces. These are due to the difference between the true particle shape and the multi-spherical approximation and other arises from the contact model used in the Discrete Element Modelling simulations. Wu et al. [
26] analyzed the validity of the Hertz theory for large deformations by means of nanoindentation tests and finite element method. They proved that the loading load-displacement relation still holds for δ/R as large as 0.66 with a maximum principal strain of 46.6%. Vouaillat et al. [
27] studied the rolling contact fatigue in spur gears taking into account the spur gear material geometry, the contact pressure fields and several parameters such as friction, sliding coefficient, load variation and roughness. A fatigue criterion based on rolling contact fatigue micro-cracks nucleation at grain boundaries is proposed. Yousuf [
28] examined the effect of contact load on the bending deflection considering a system with spring stiffness and viscous damping to reduce the bending deflection on the cam profile. The dynamic response has been obtained by means of Solid Works software based on the contact parameters. Finite element analysis was used to calculate the bending deflection of the cam profile numerically. A new impact-driving piezoelectric vibration energy harvesting for low-frequency and broadband vibration harvesting is proposed by Cao et al. [
29]. The results of the numerical simulation and vibration test demonstrate the advantages of the vibration energy harvesting for the lower resonance frequency and the higher output power. Zhang et al. [
30] proposed an enhanced vibro-impact energy harvester using acoustic back holes for scavenging low-frequency vibration energy.
The present work is motivated by the need to add new results to this narrow field of research. The first objective of this work is to find an approximate analytical solution for the nonlinear differential equation of the vibro-impact oscillator under the influence of the two symmetric EA force near the primary resonance. The vibro-impact regime is given by the presence of the Hertzian contact supposing that the contact is elastic and is maintained. The Optimal Auxiliary Functions Method (OAFM) is applied to determine an analytic approximate solution of the problem. The main novelties of the proposed approach are the presence of some auxiliary functions, the introduction of the convergence-control parameters, the original construction of the initial and first iteration, and the freedom to choose the procedure for determining the optimal values of the convergence-control parameters. The proposed technique is proved to be very accurate, simple, effective, and easy to be applied using only the first iteration.
The second objective of the paper is to perform an analysis of the stability of the nonlinear model by means of the eigenvalues of the Jacobian matrix. The signs of the eigenvalues determine stability, so that we will lease discussions of the borderline cases. The global stability is studied by means of the Lyapunov function.
2. Mathematical Model
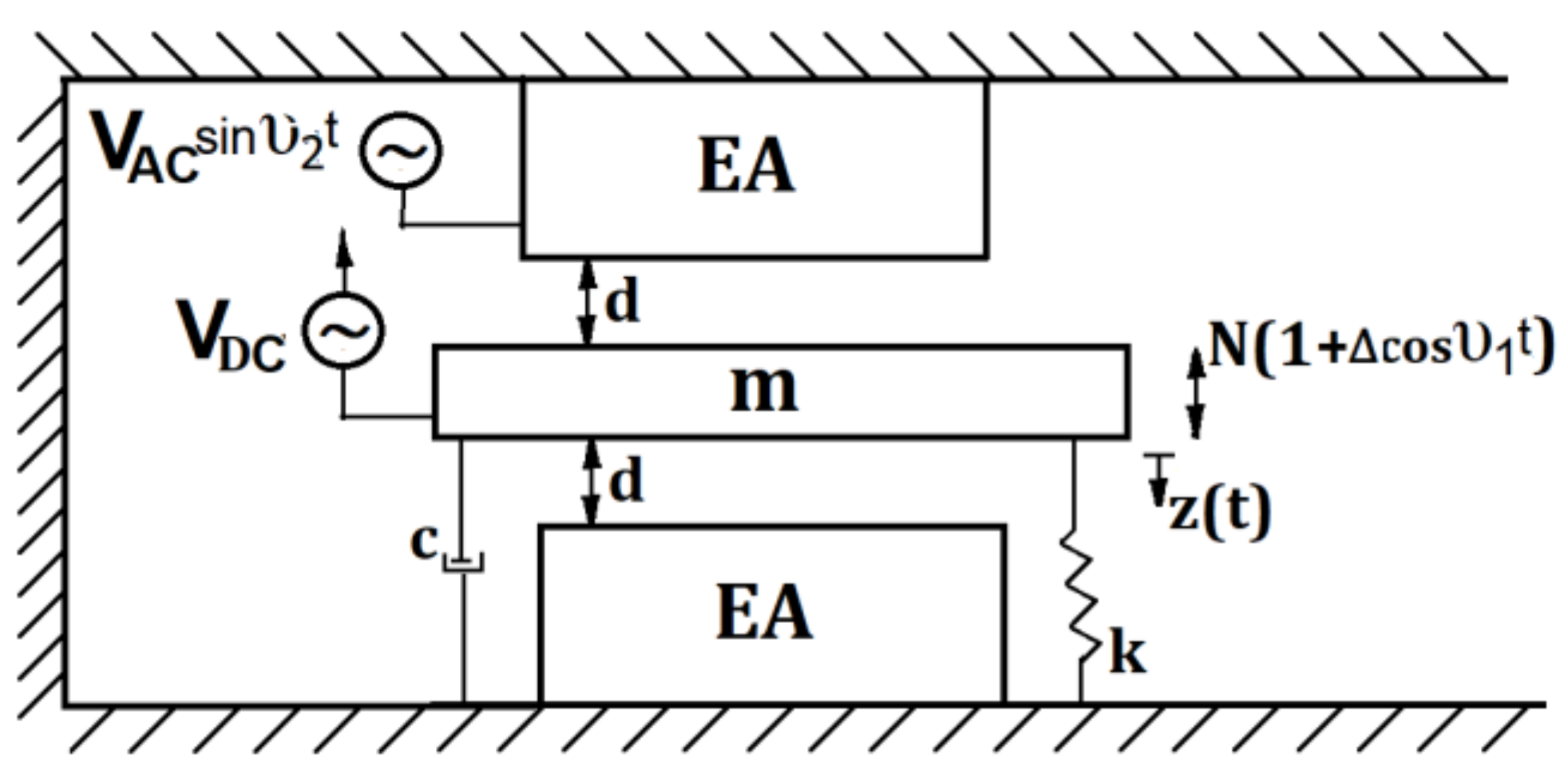
Henceforward we consider two symmetrical EA on the loss contact only on the frequency response of the Hertzian contact oscillator near the primary resonance. The model is depicted in
Figure 1 and the governing equation can be written as [
4,
15,
16]:
where the dot denotes differentiation with respect to time
t and
z(
t) is the normal displacement of the rigid mass
m,
c is the damping coefficient,
k is the constant given by the Hertzian theory,
N is the static normal load, ∆ is the amplitude, and ν
1 is the frequency of the harmonic excitation load, and
Fem is the electromagnetic force.
Within Equation (1) we took into consideration that the deformation between the solids in contact are elastic, the contact is maintained and the dry contact is equivalent with the linear viscous damping.
The vibrating beam of mass m is placed on z-axis between two fixed electrodes. The driving voltage
Vbias +
VACsinν
2t is generated by the combined action of DC and AC voltage and sources on the resonator electrode. The interaction between the driving voltage and parallel plate causes the electromagnetic force
in which
C0 is the capacitance of the parallel-plate actuator,
d is the initial gap width, and ν
2 is the frequency.
Using Equation (2), the Equation (1) can be rewritten in the dimensionless form as
where the prime denotes differentiation with respect to τ and
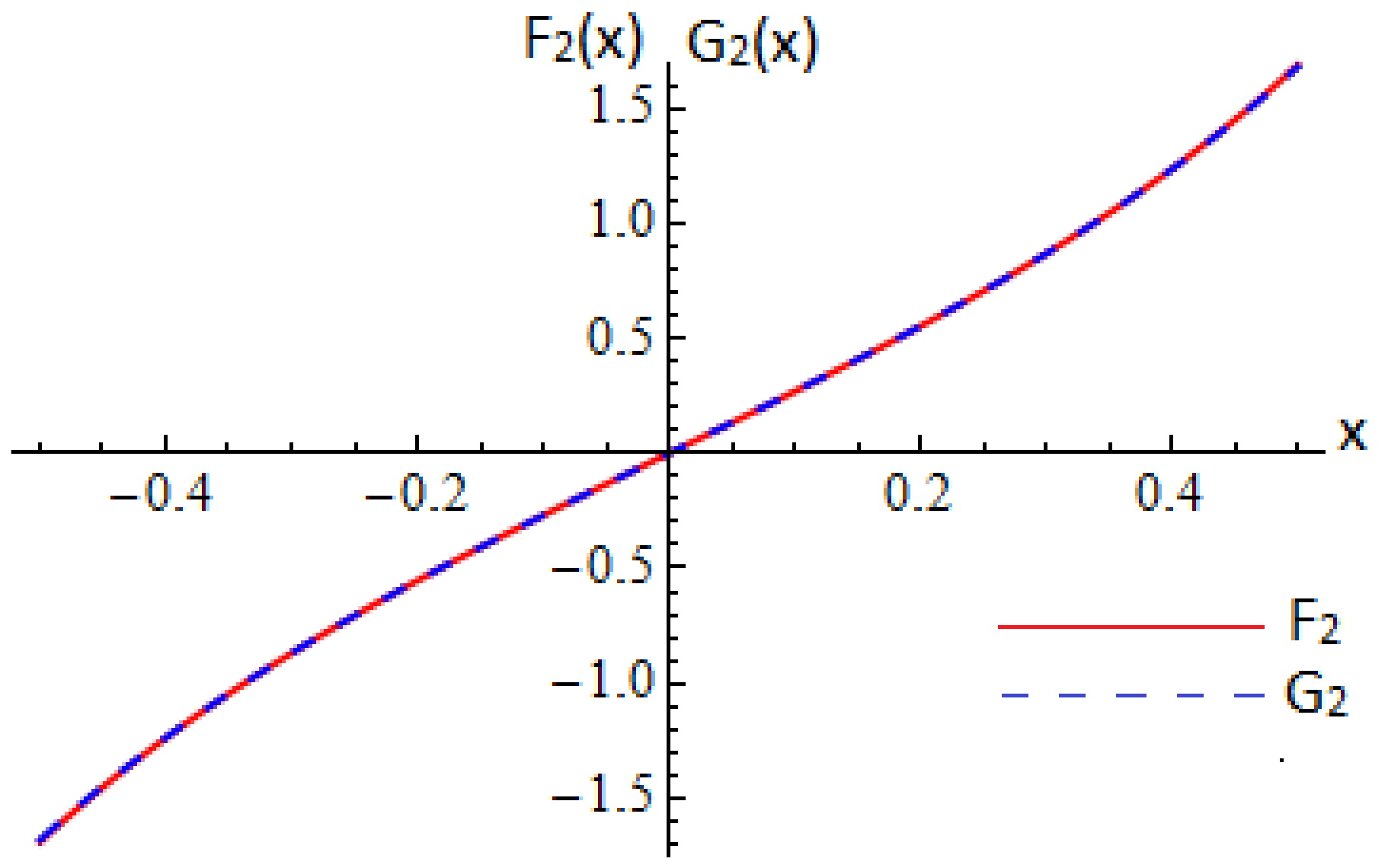
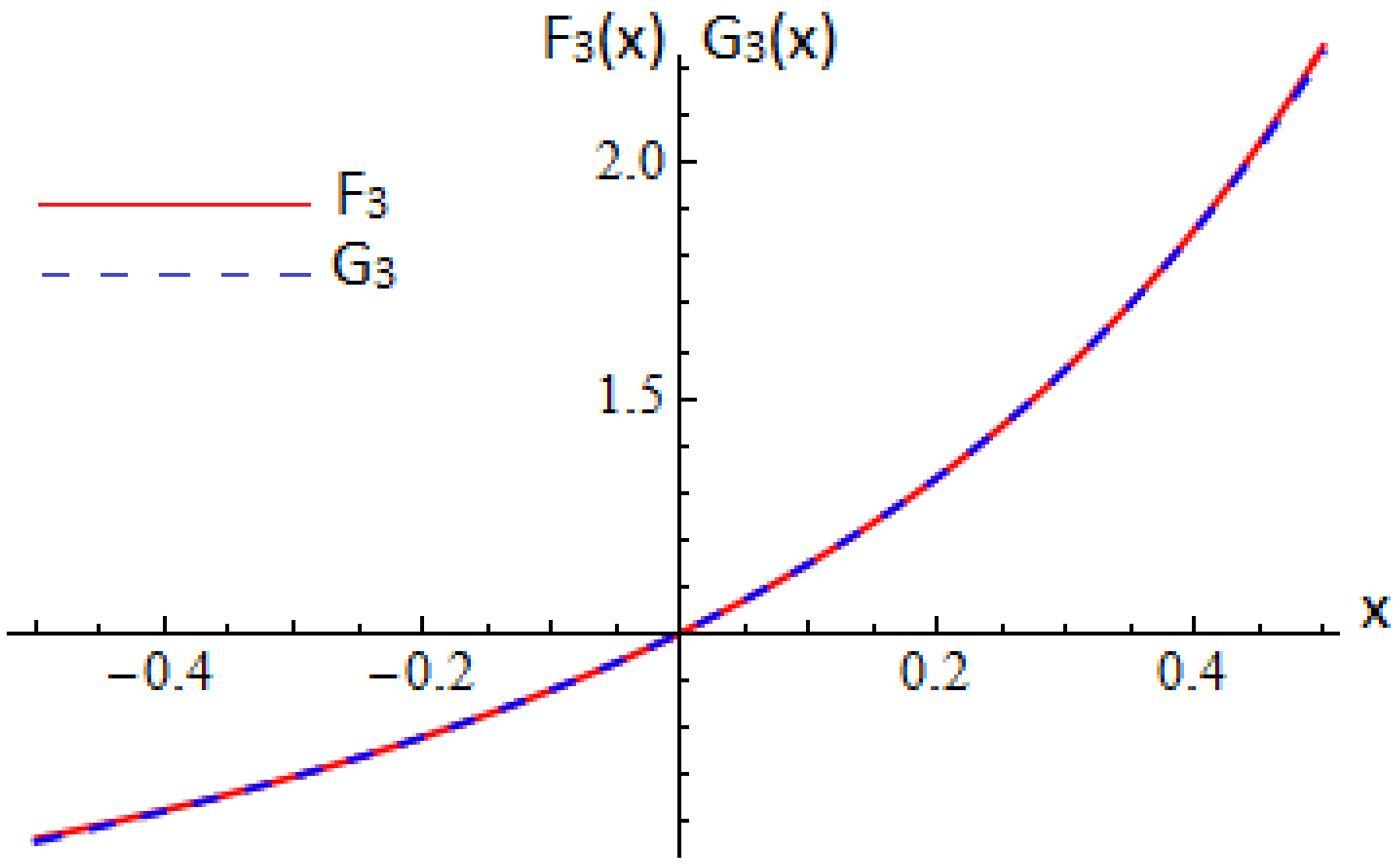
The following approximations are used:
Figure 2,
Figure 3 and
Figure 4 depict the variations of
Fi(
x) and
Gi(
x),
i = 1, 2, 3 for
R = 1 on domain [−0.5–0.5]. The maximum errors of the approximations (5) are, respectively:
In this way, Equation (3) can be rewritten in the form
where
It should be emphasized that in this paper no simplifying assumption is made as in other papers. For example, the amplitude of AC excitation voltage is much lower than the bias voltage [
10,
15,
25]. In the present paper we consider only the primary resonance:
in which δ is the detuning parameter from the primary resonance.
The initial conditions for the nonlinear differential Equation (7) are
It is clear that the Equation (7) with initial conditions (10) is a second order nonlinear differential equation with variable coefficients of the five order and therefore is very difficult to find an exact solution. In the following, for Equations (7) and (10) the OAFM is applied to study the nonlinear vibrations near the primary resonance.
3. Application of the OAFM
In order to apply OAFM [
31,
32,
33,
34,
35,
36], it is observed that the linear operator and the nonlinear operator corresponding to Equations (7) and (10) are, respectively:
For Equations (7) and (10), the approximate analytical solution can be written as:
where
Ci,
i = 1, 2, …,
n are
n parameters unknown at this moment, and
n is an arbitrary positive integer fixed number. The initial approximation
x0(τ) is determined from the following linear differential equation:
whose solution is
where
. Inserting Equation (15) into Equation (12), after simple manipulations we obtain:
To obtain the first approximation
x1(τ,
C1,
C2,…,
Cn), we choose this function in the form:
where
x10(τ,
Ci) can be obtained by using Equations (15) and (16) in the form:
in which
Gj are combinations of the functions which appear into Equations (15) and (16). These auxiliary functions
Gj are not unique. For example, the auxiliary function
Gj can be of the form:
or
or
and so on. The initial condition for the first iteration are obtained from Equations (10) and (14):
Having in view only Equations (19) and (22), the function
x10 can be obtained from the linear differential equation:
The solution of the last equation is
where
We have a great freedom to choose the function
x20 from Equation (17):
or
or
and so on.
If we choose the expression (26) for the function
x20(τ,
Ci), then the first approximation is obtained from Equations (17), (24) and (26):
The approximate solution of clamped, forced oscillator can be obtained from Equations (13), (15) and (29):
where the coefficients
Mi,
i = 1, 2, 3, 4 are given by Equation (25).
It is known that the damped solution (30) is valid on a certain domain
D = [0,τ*]. For the steady-state solution, valid for τ > τ*, the linear and nonlinear operators are, respectively:
The initial approximation is obtained from the linear differential equation:
where
and
are obtained from Equation (30), so as to ensure the continuity of the solution.
The solution of Equation (32) is:
The first approximation
x1(τ) can be obtained similarly to Equation (23):
from which
The steady-state solution of Equations (7) and (10) is obtained from Equations (13), (33) and (35):
4. Numerical Example
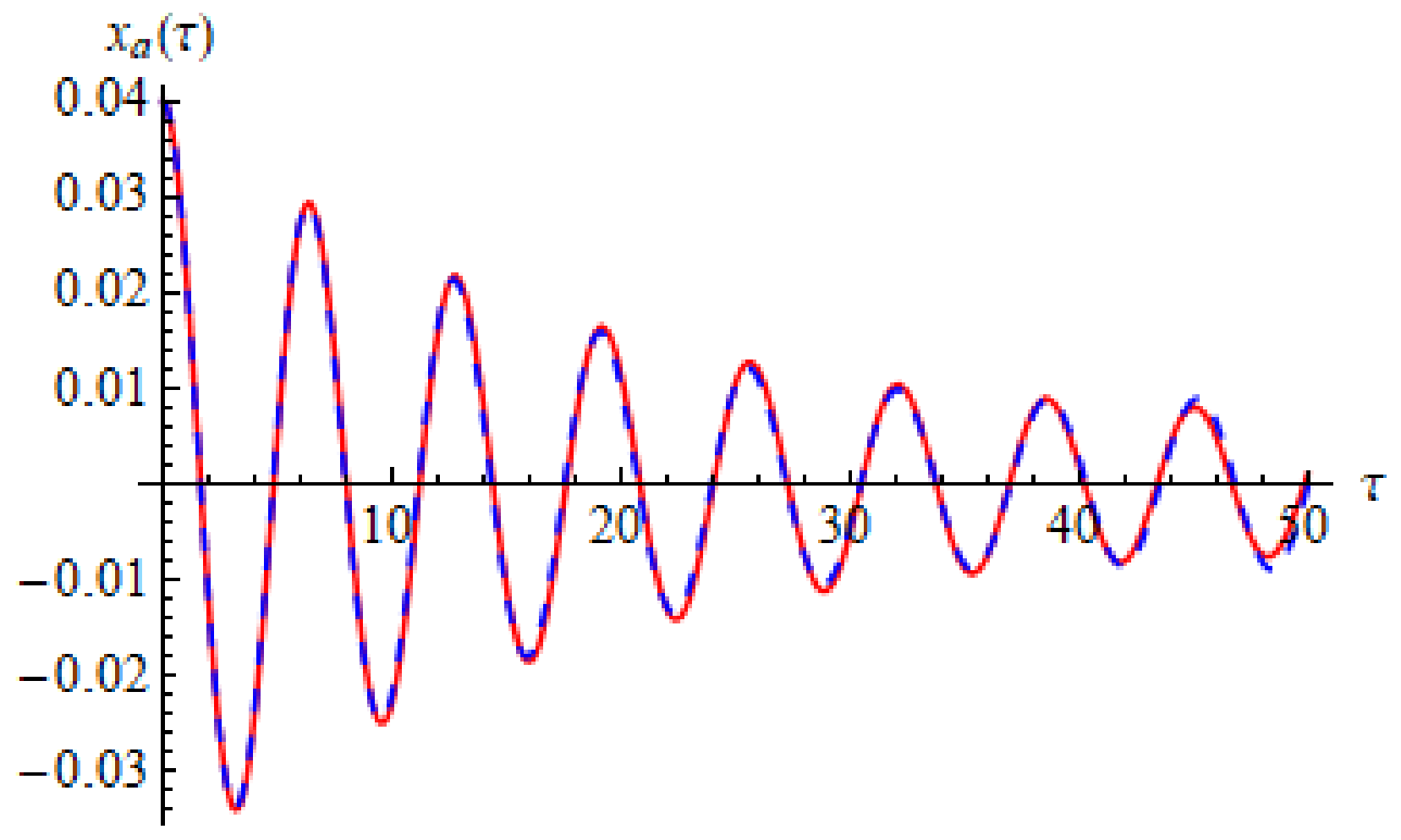
The efficiency of our procedure can be proved considering the following particular case, characterized by the following parameters:
A = 0.04, μ = 0.1, ∆ = 0.0007, α = 0.001, β = 0.0001, γ = 0.0002, δ = 0.02, ε = 0.01, R = 1.
From the above procedure, the optimal values of the convergence-control parameters are determined by minimizing the residual of the governing equation:
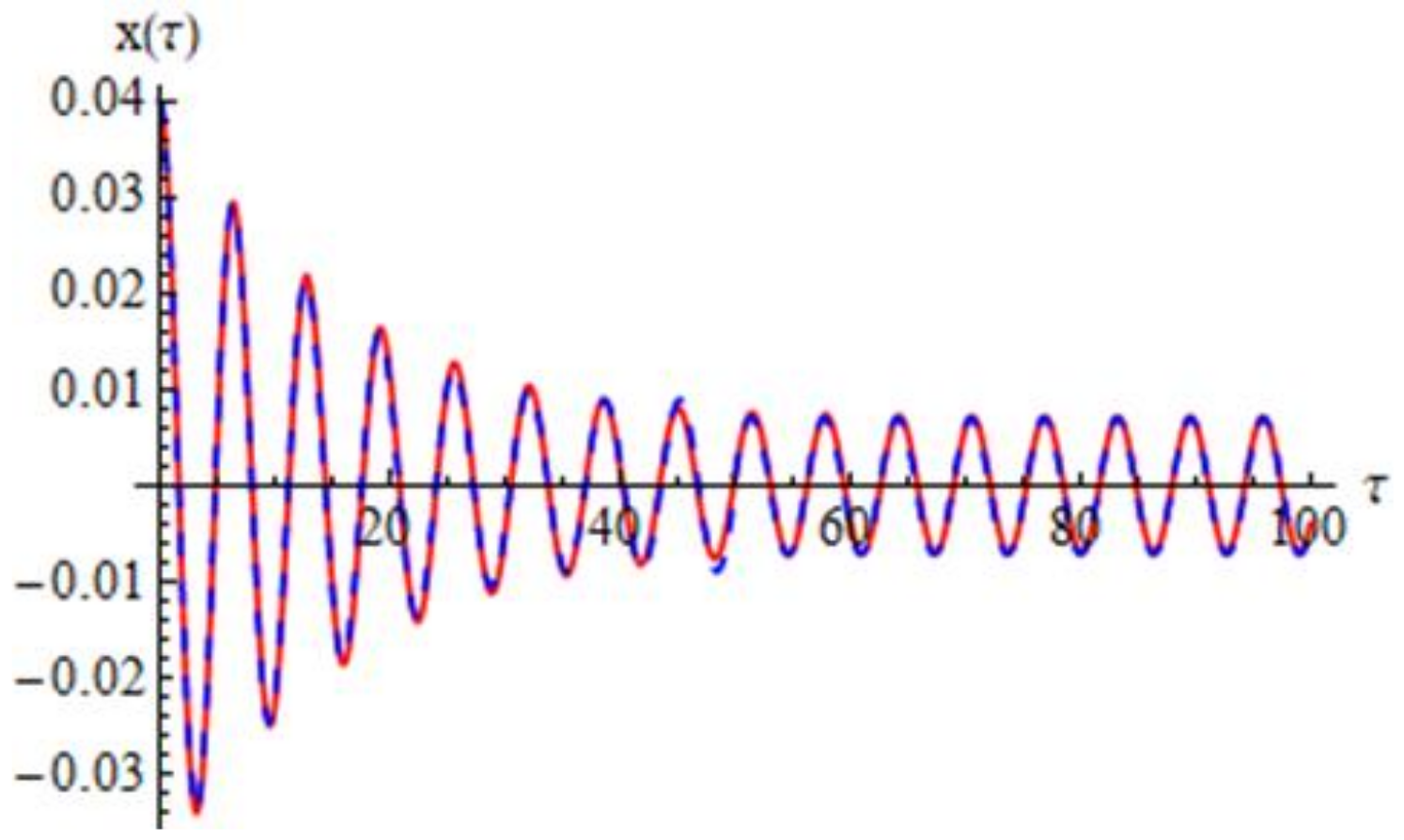
The
Figure 5 shows the comparison between approximate solution (30) of nonlinear problem (7) and (10) and numerical solution obtained by means of a fourth-order Runge-Kutta approach for τ = [0,50].
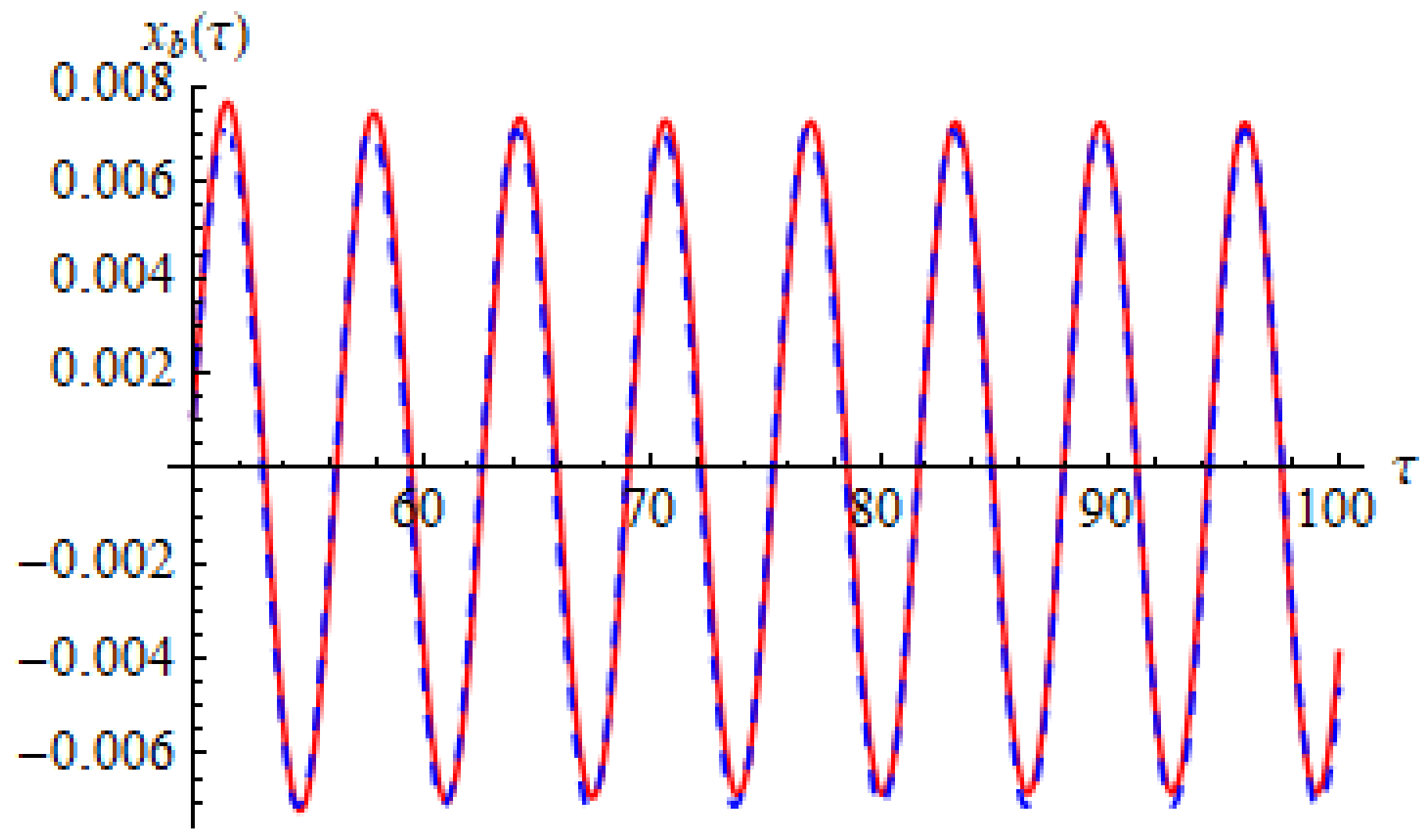
For the steady-state solution (
t > 50) the optimal values of the convergence-control parameters are
and the comparison between the corresponding approximate solution and numerical integration results is presented in
Figure 6.
From
Figure 7, it can be seen that the two solutions for τ < 50 and τ > 50 obtained using the proposed technique are nearly identical with that obtained through numerical integration and this excellent agreement validates the proposed approach and the obtained results.
5. Analysis of the Stability of Steady-State Motion for the Primary Resonance
In this section we use a perturbation method to investigate the stability of the steady-state motion. For this aim we use the transformation [
37]
In order to substitute this transformation into Equation (7), we need expressions of the first and second derivatives of variable
x with respect to τ. We obtain
Expanding
x in power series, one can get:
Substituting Equation (41) into Equation (7) it holds that
Averaging Equation (42) we obtain
Subtracting Equations (42) and (43) yields
Using the so-called inertial approximation [
37], i.e., all terms of Equation (44) can be ignored, except the first and the last terms, such that:
from which we have:
Inserting Equation (46) into Equation (43) and taking into account the following identities:
We find the approximate equation for the variable
X in the form
in which
Now, introducing a bookkeeping parameter
and scaling
, with notation
and then taking into consideration Equation (40), Equation (49) can be rewritten as
We seek a solution of Equation (52), equating the terms of same power of
:
The solution of Equation (53) is of the form:
Substituting Equation (55) into Equation (54) and avoiding secular terms, we obtain after some manipulations:
Equilibrium points of Equations (56) and (57), correspond to periodic motion such that .
Using the notation:
from Equations (56) and (57) we obtain
From algebraic Equations (59) and (60) one can get
where
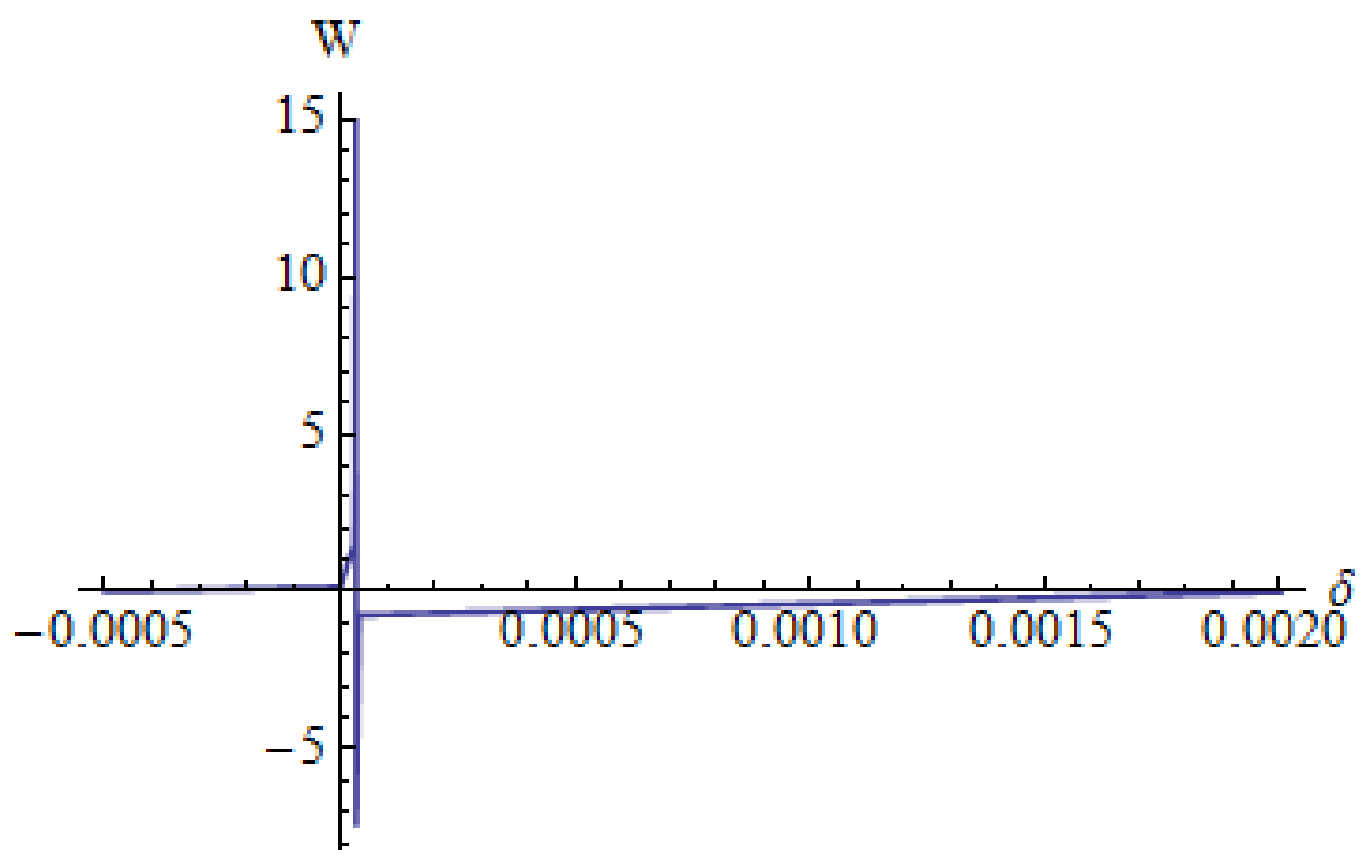
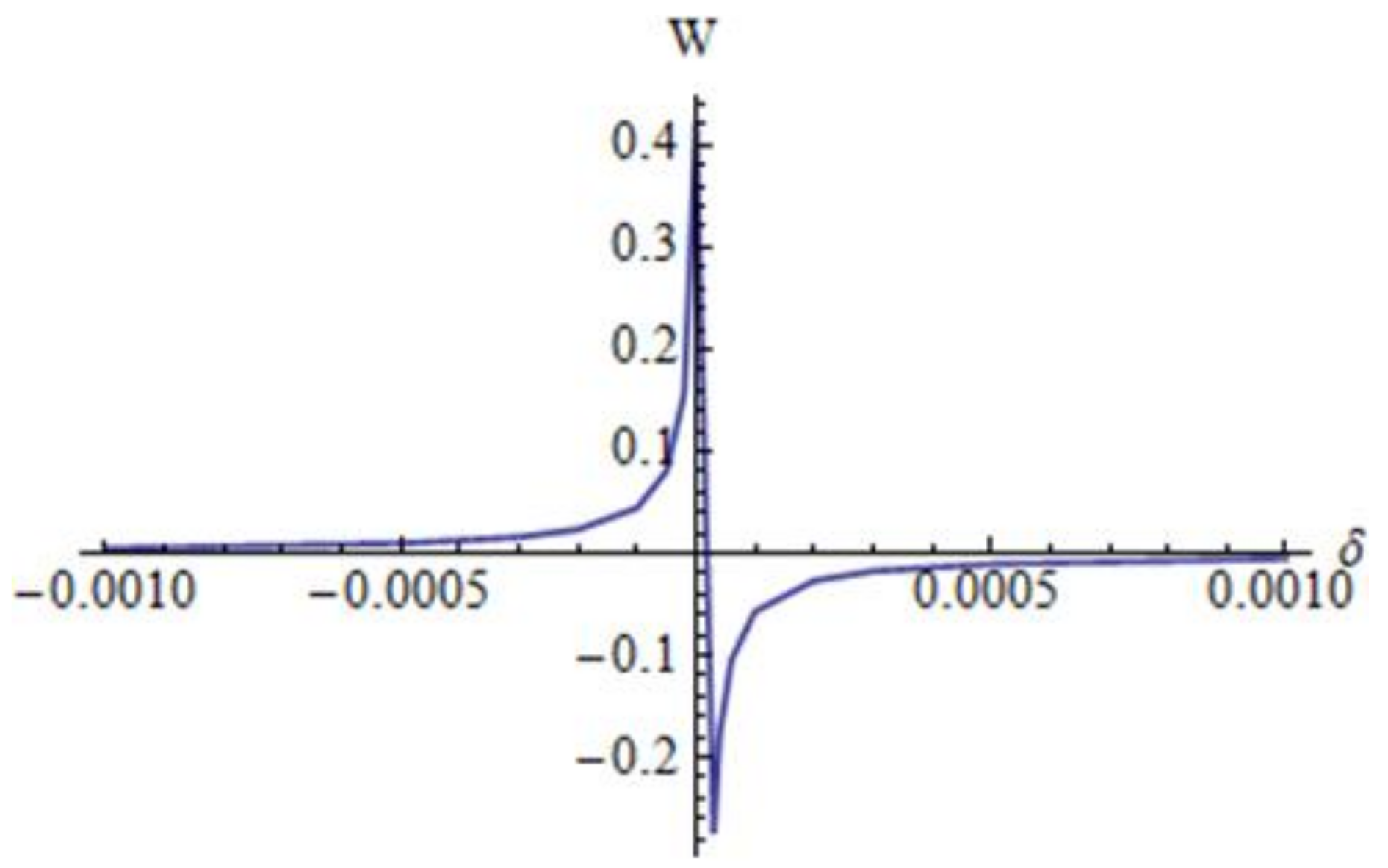
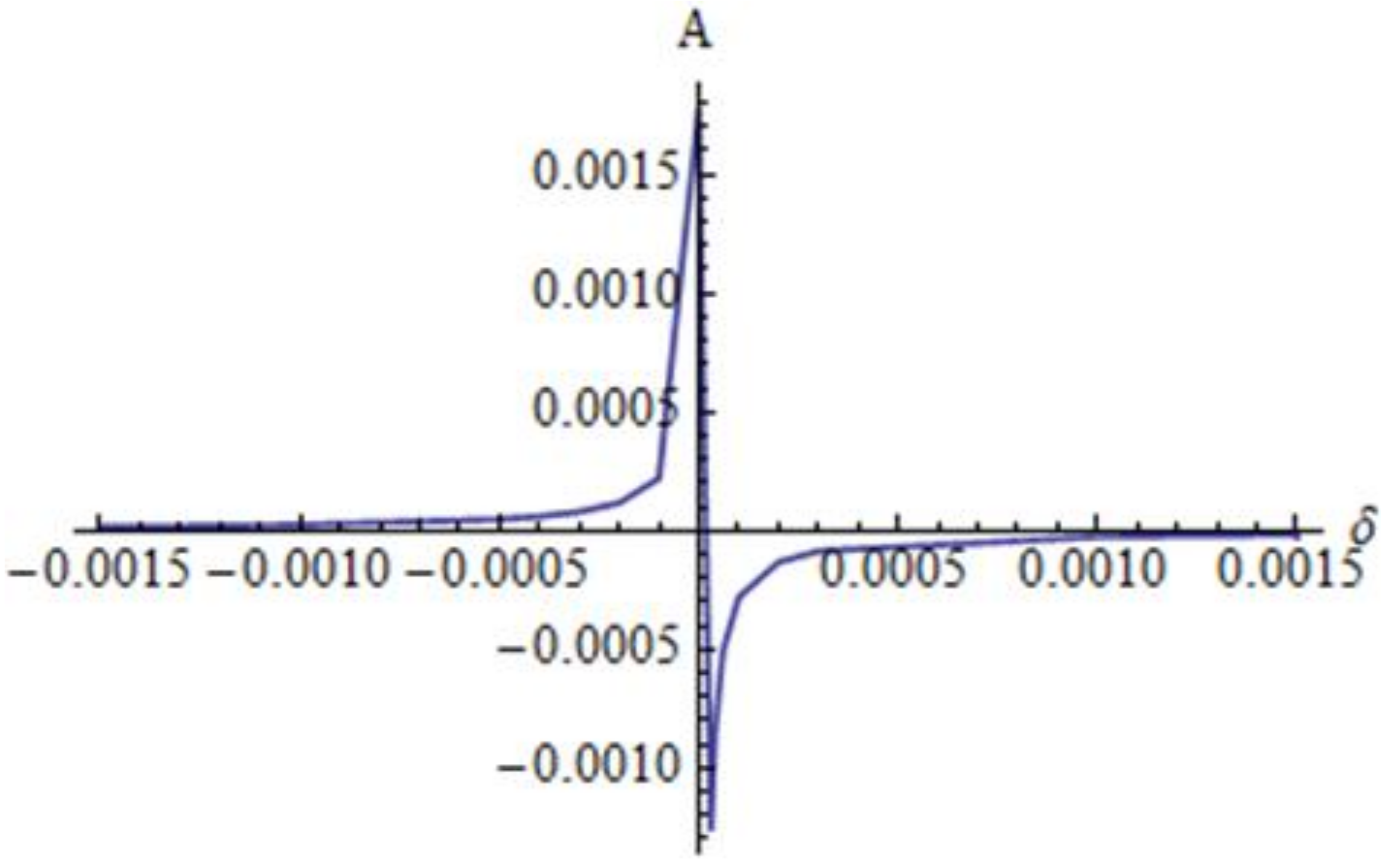
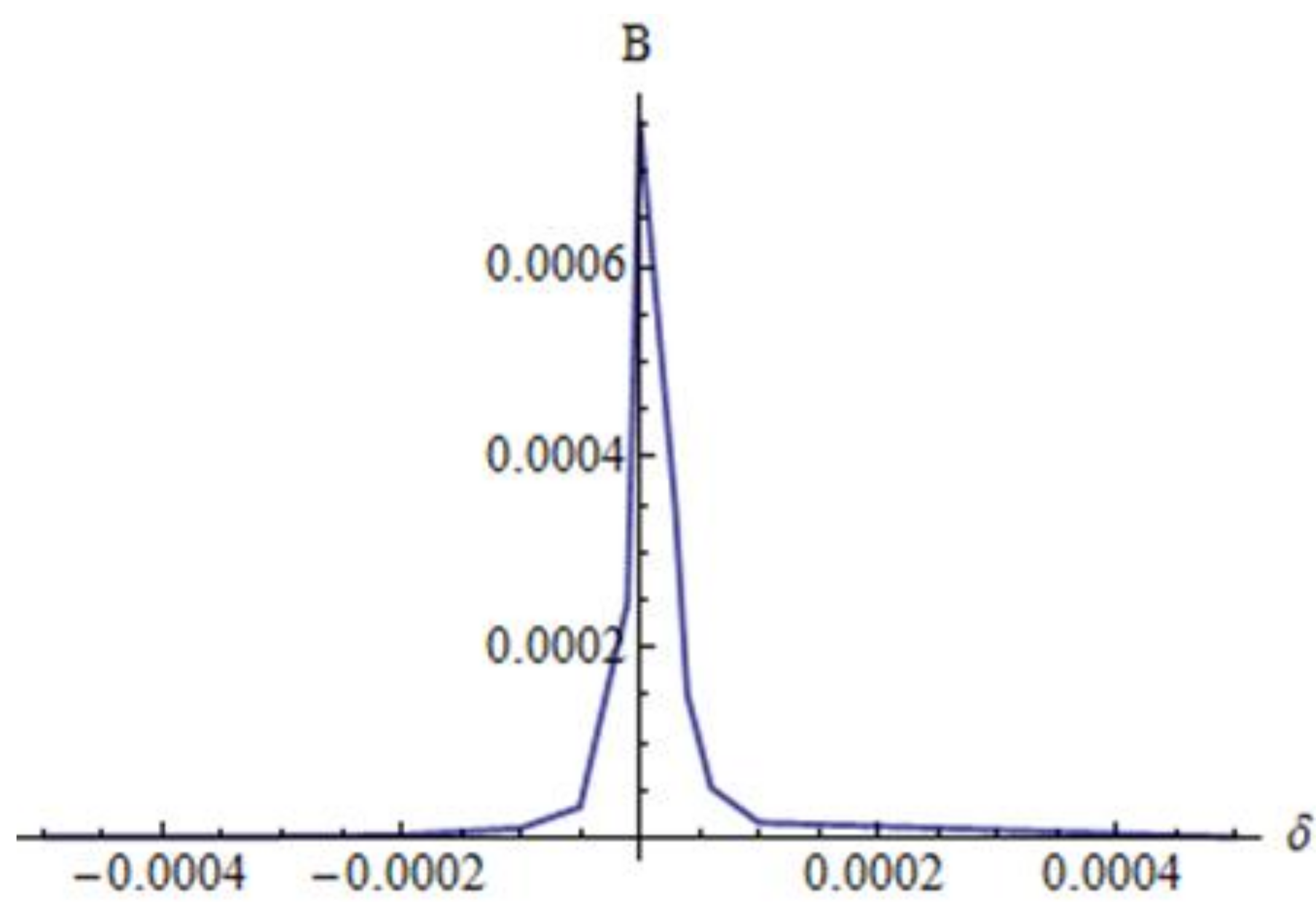
W is obtained from the following nonlinear equation:
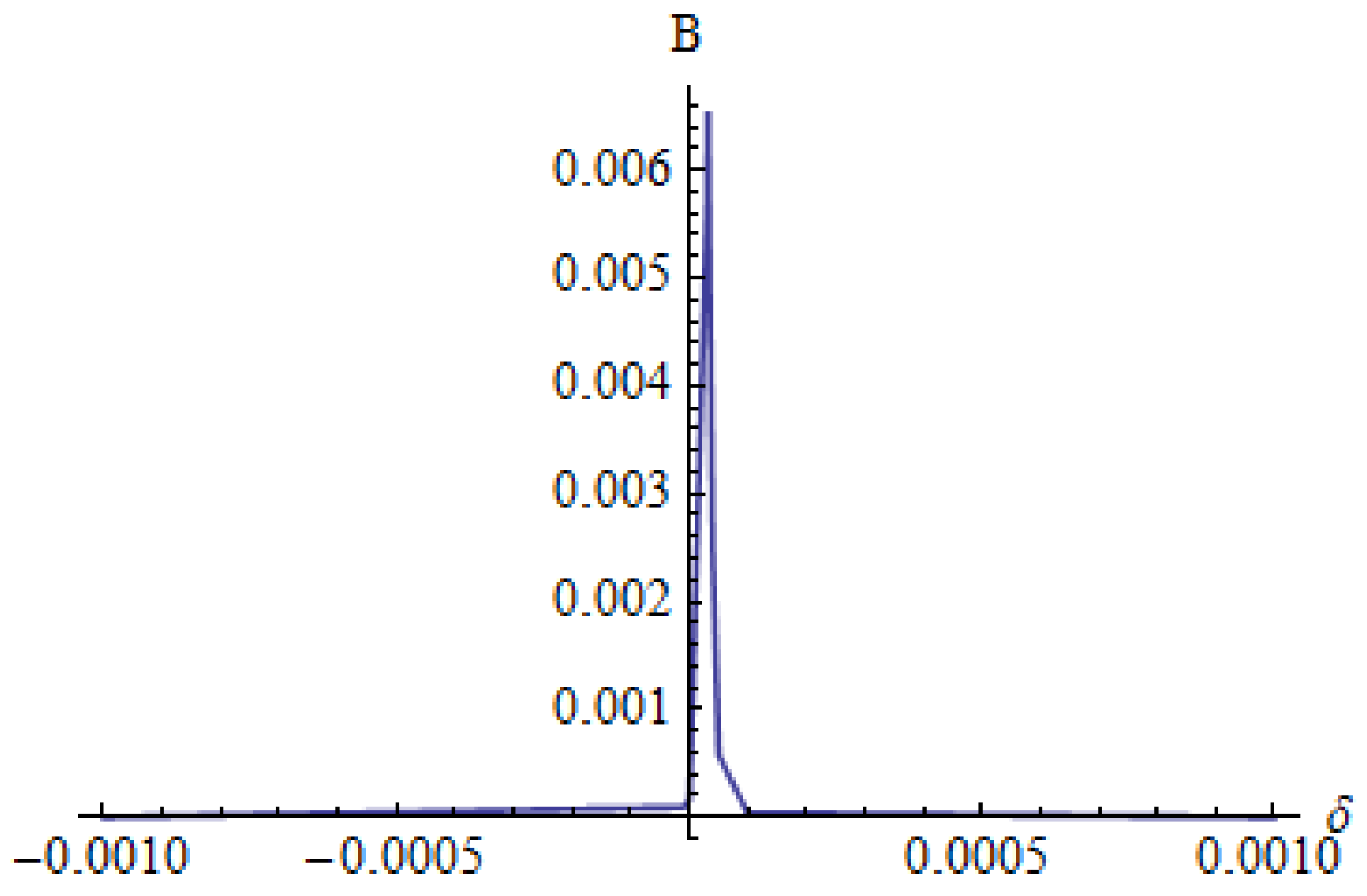
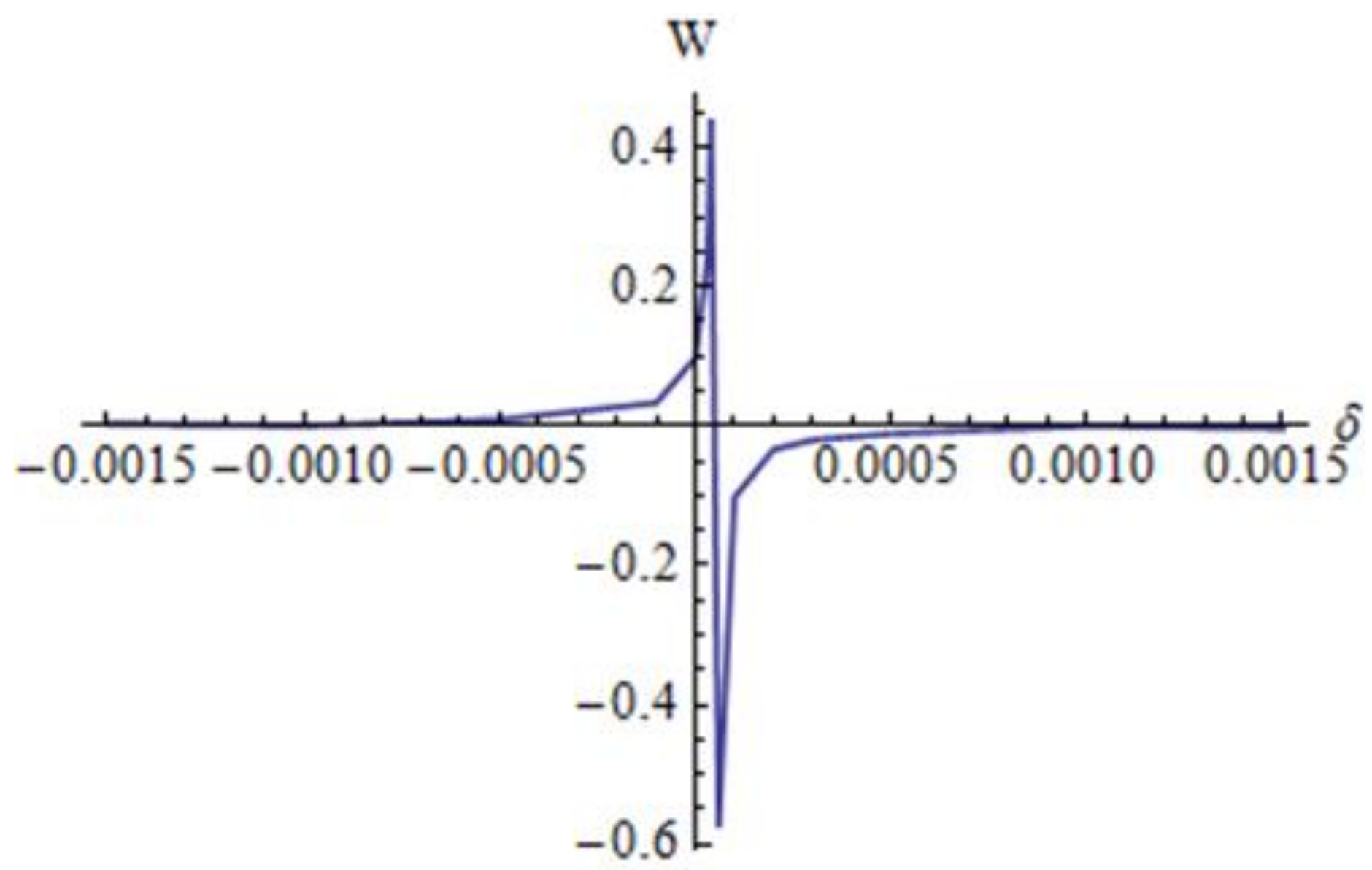
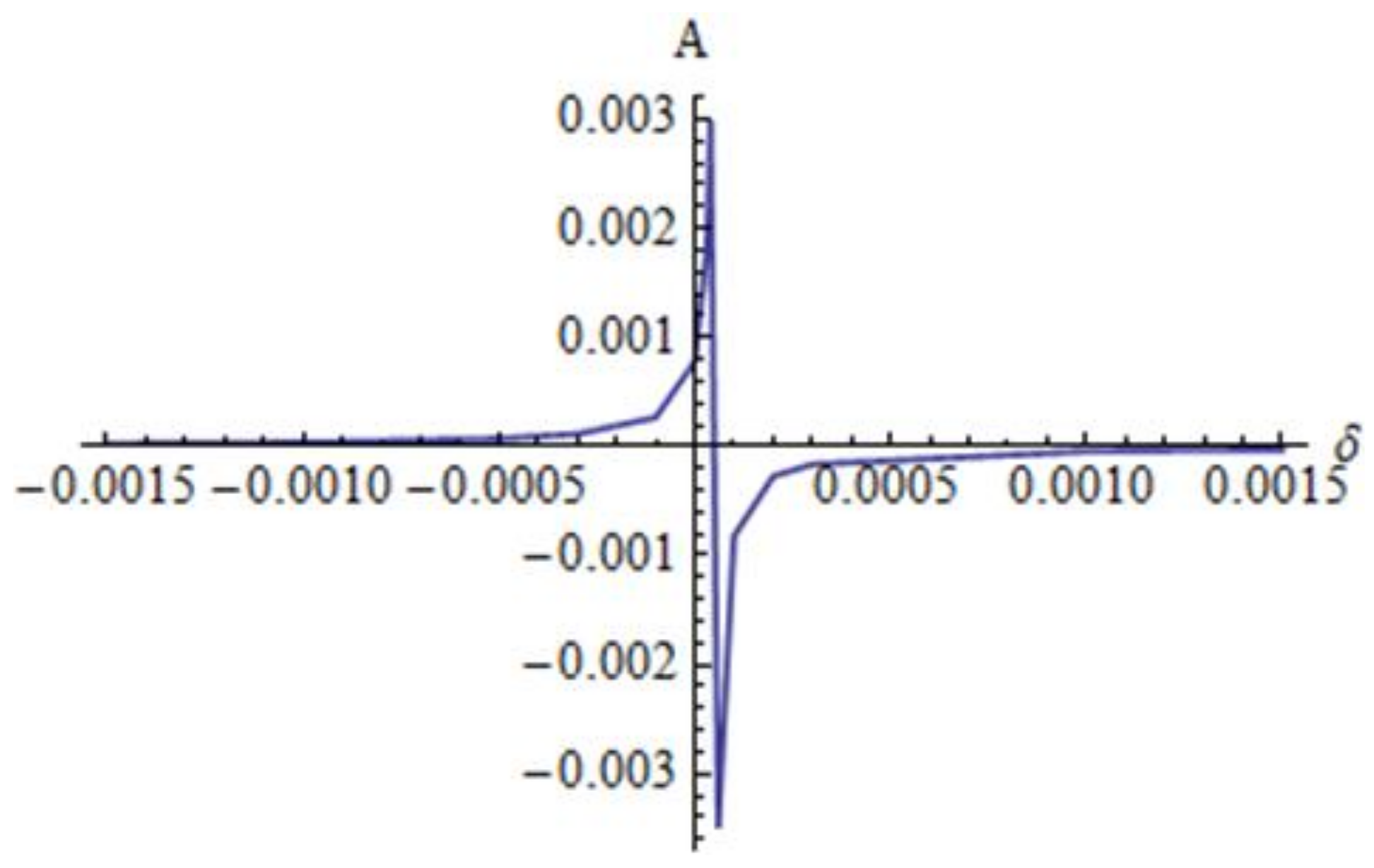
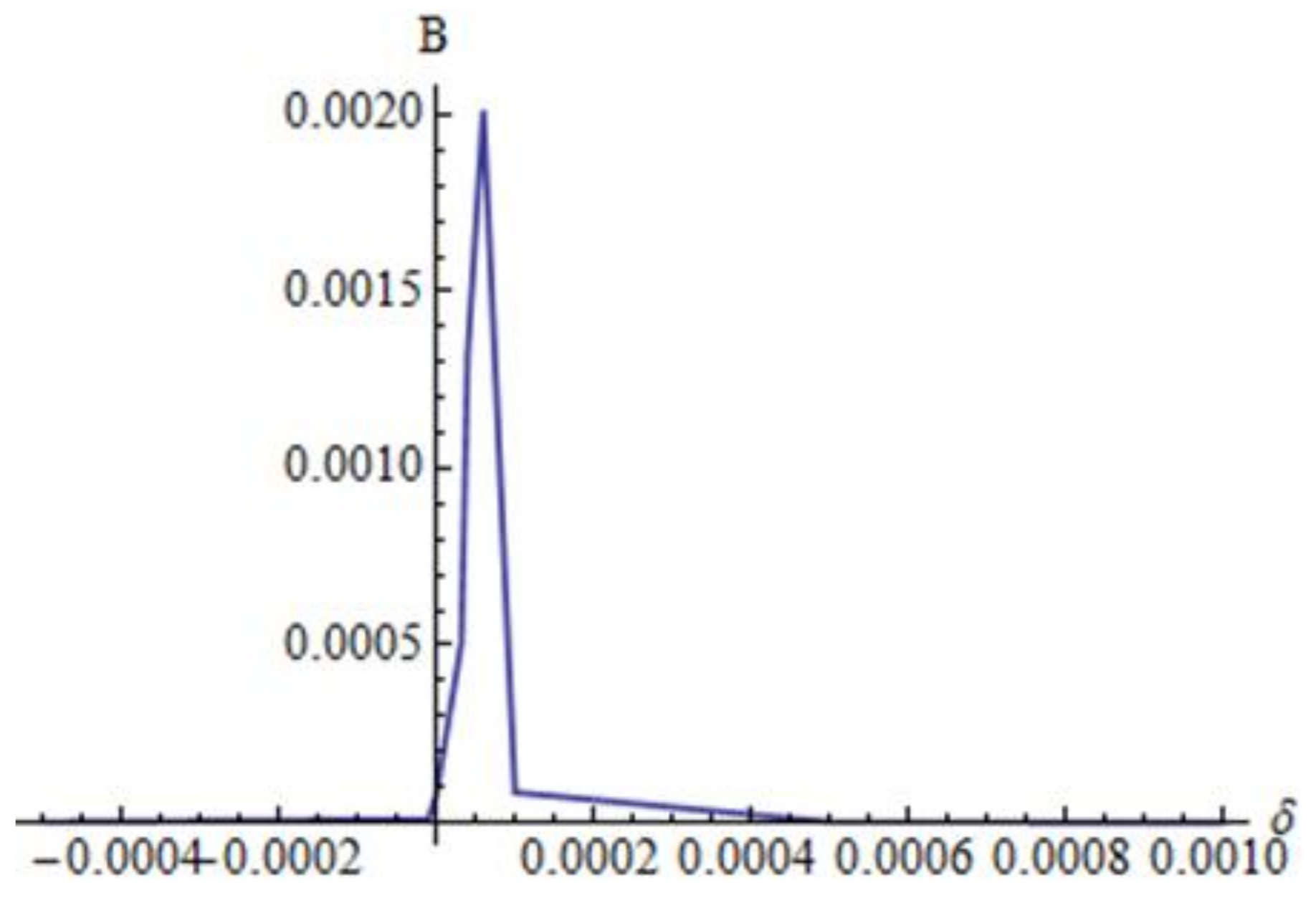
From Equation (62) it can be obtained
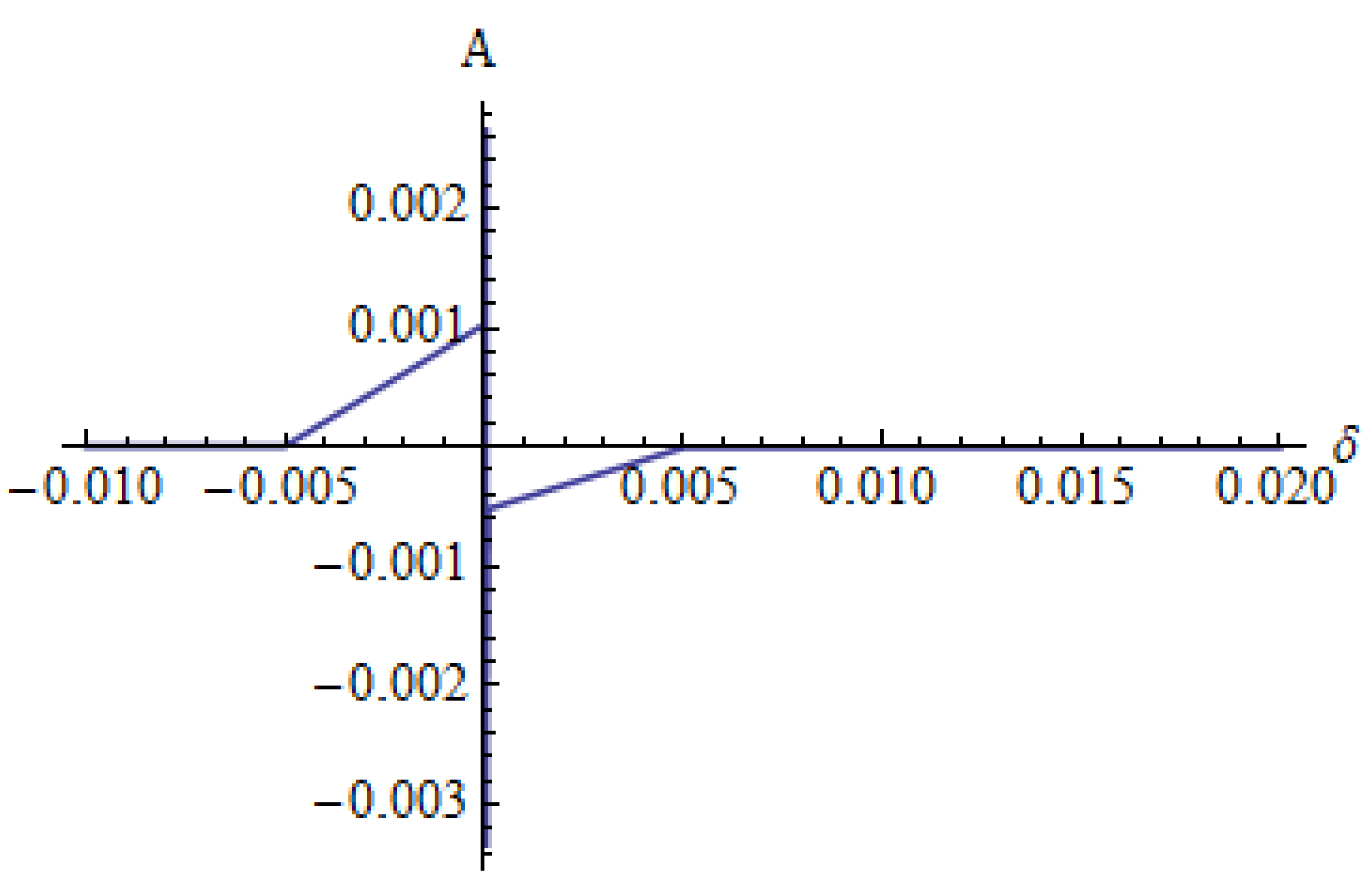
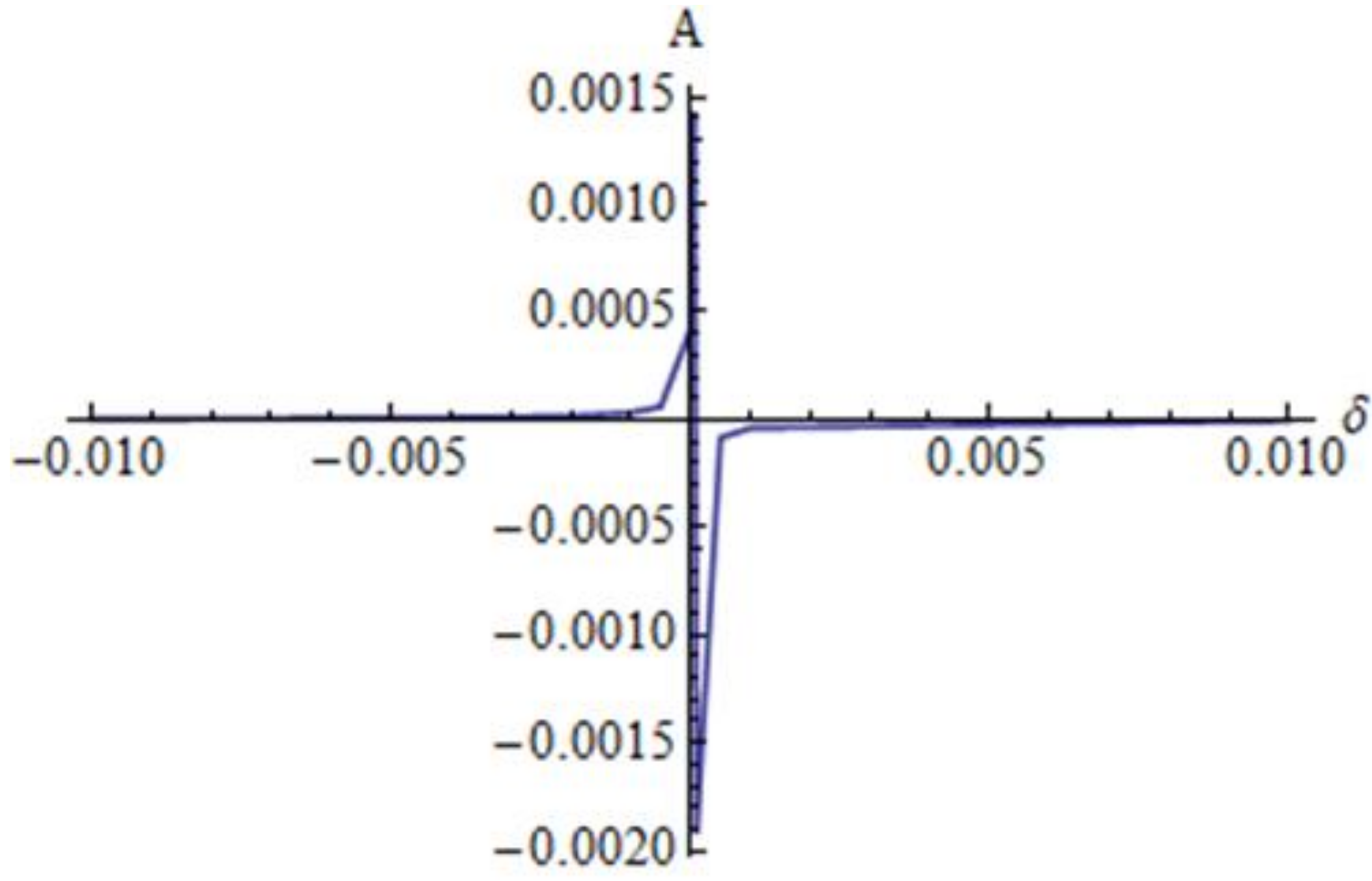
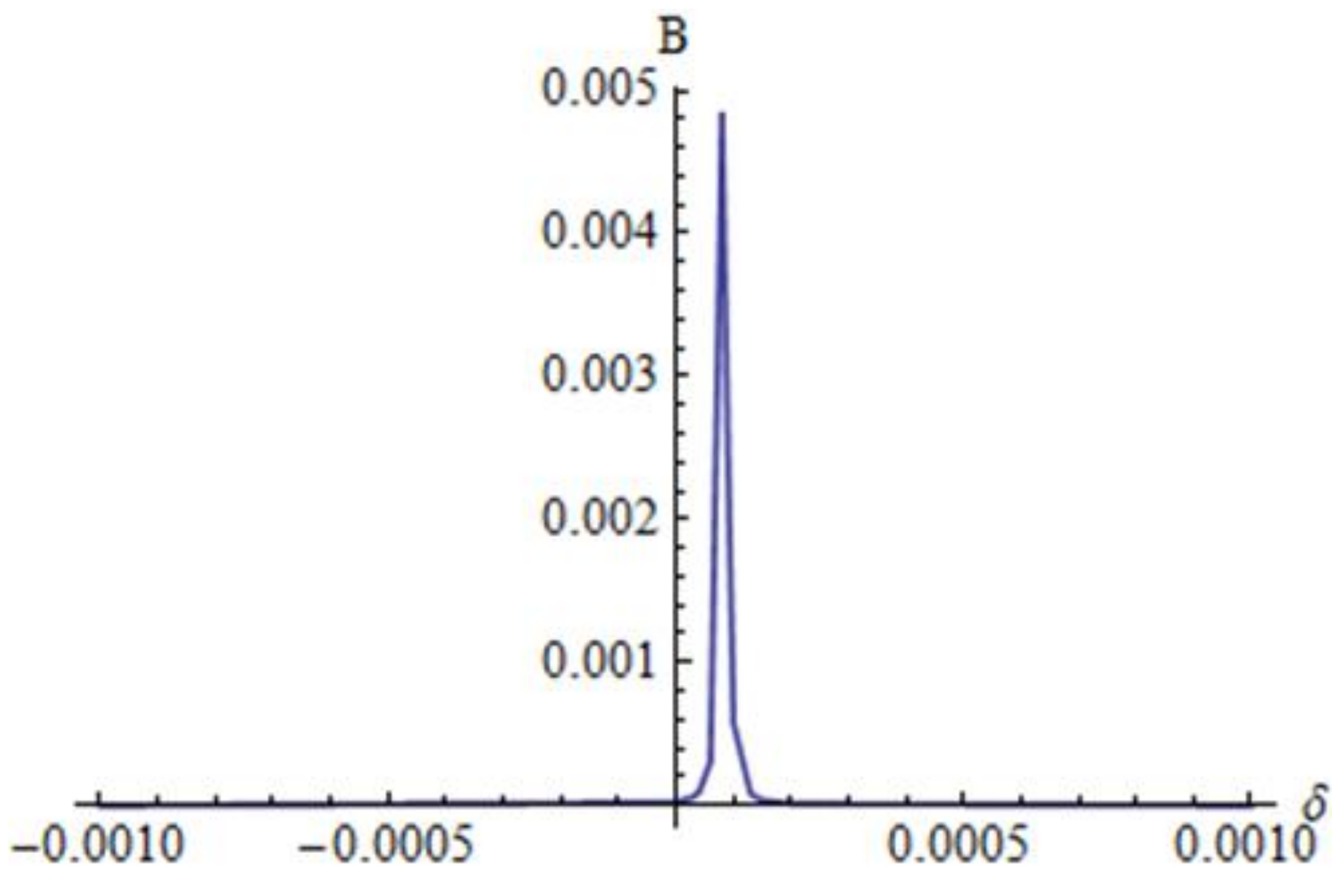
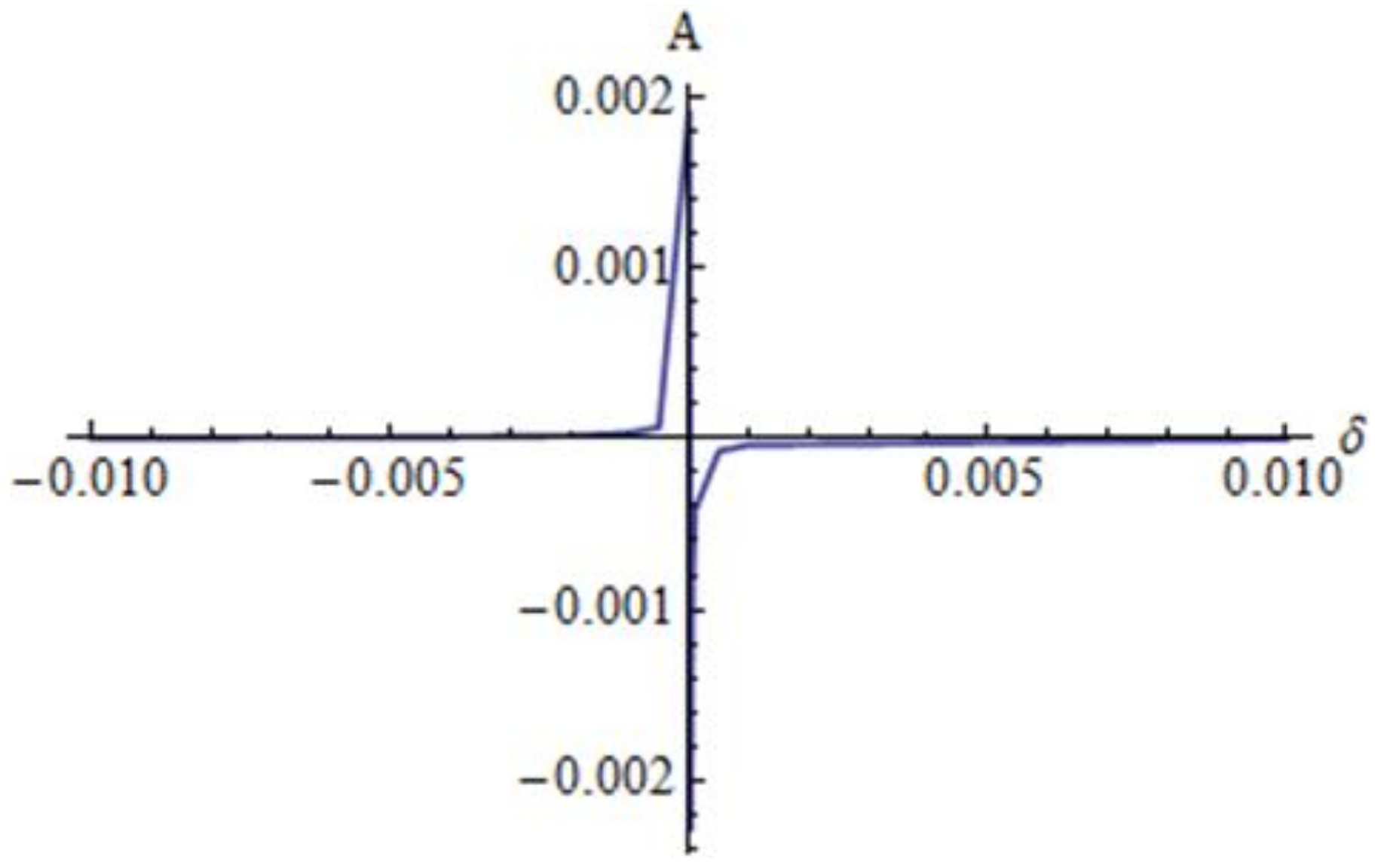
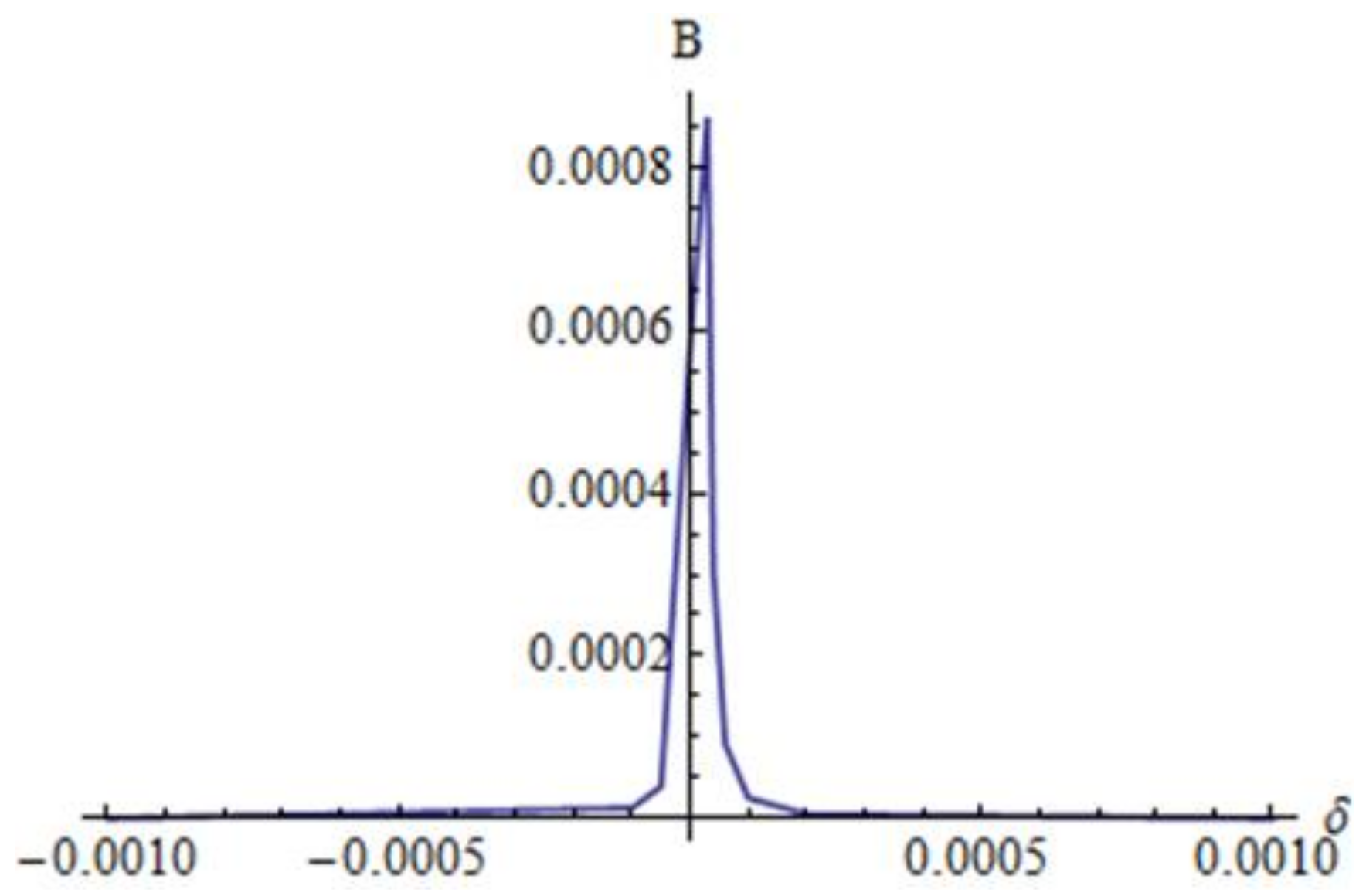
W as a function of δ. In this way the values of the equilibrium points A and B are known. For example,
Figure 8,
Figure 9 and
Figure 10 depict the function
W from (62) and the equilibrium points A and B from Equation (61) in the particular case
a1 = 1;
a2 = 1/6;
a3 = −1/54;
a4 = 1/432;
a5 = 1/1296;
γ = 0.0002.
In
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14,
Figure 15,
Figure 16,
Figure 17,
Figure 18,
Figure 19,
Figure 20,
Figure 21 and
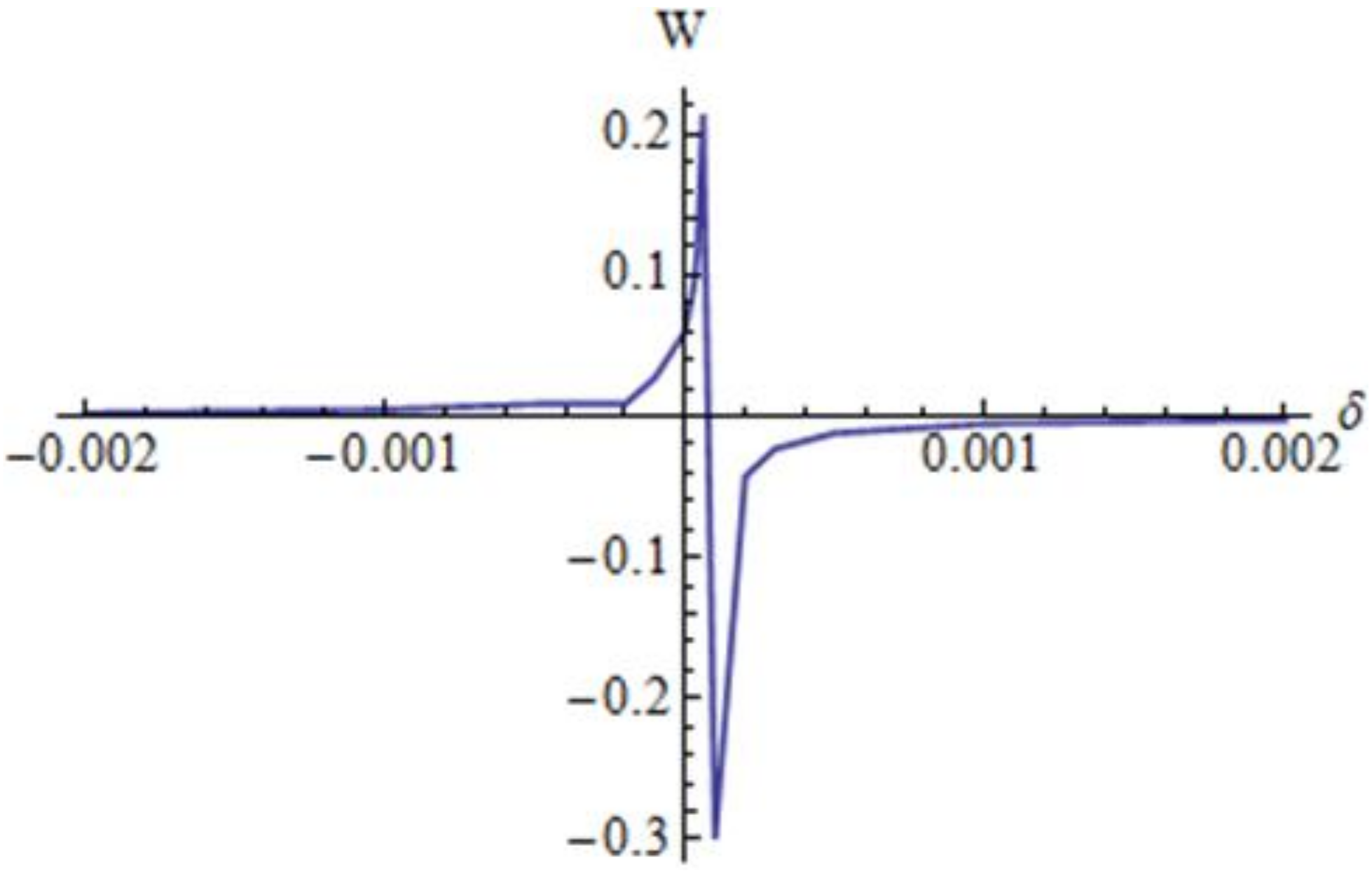
Figure 22 it can be observed the influence of some key parameters on the system stability. From
Figure 12,
Figure 13,
Figure 15 and
Figure 16 it is observed that in the neighborhood of the origin, the amplitudes of A and B decrease with the increases of the parameter a
1. In the outside of the neighborhood of the origin, the amplitudes of A and B are very little influenced by the parameter
a1. The same conclusions can be drawn concerning the influence of the parameter
γ: the amplitudes of A and B decrease with the increases of the parameter
γ in the neighborhood of the origin, but outside of the neighborhood of the origin, the amplitudes of A and B are very little influenced by
γ.
In order to determine stability of the equilibria, we will construct the Jacobian matrix, obtained from Equations (59), (61) and (62):
where
and therefore
The sign of real parts of the eigenvalues of the Jacobian matrix are obtained from the characteristic equation:
where [
I2] is the unity matrix of the second order and λ is the eigenvalue of the Jacobian matrix. From Equation (66) we have:
where the trace of [
J] and the determinant of [
J] are given by
The discriminant of Equation (67) is
where
W is obtained from Equation (62).
The quadratic Equation (67) has the solutions:
5.1. Possible Cases of Stability
The sign of eigenvalues λ1 and λ2 determines stability, so that we will leave discussion on so-called “borderline” cases. There are possible the following cases.
5.1.1. Case 1
The discriminant D is positive. If det[J] > 0, then λ1 and λ2 are real with the same sign and we have two subcases.
Subcase 1.a. If tr[J] > 0 then λ1 and λ2are negative and therefore the steady-state motion corresponds to nodal points and the motion is stable.
Subcase 1.b. If tr[J] < 0, then λ1 and λ2are positive and the motion is unstable.
5.1.2. Case 2
The discriminant D is negative, then the eigenvalues are complex-conjugate and the steady-state motions correspond to focal points (or focus). It follows three subcases.
Subcase 2.a. If tr[J] = 0, then the focal points are centers.
Subcase 2.b. If tr[J] > 0, then the focal points are stable.
Subcase 2.c. If tr[J] < 0, then the focal points are unstable.
5.1.3. Case 3
The discriminant D = 0 and therefore . The steady-state motion corresponds to nodal points.
Subcase 3.a. If tr[J] > 0, then λ1 = λ2 are negative and nodes are stable.
Subcase 3.b. If tr[J] < 0, then λ1 = λ2 are positive and nodes are unstable.
Subcase 3.c. If tr[J] = 0, then λ1 = λ2 = 0, then there is no motion.
In the case of Hopf bifurcation λ1 = iΩ, λ2 = −iΩ, such that tr[J] = μ = 0 and det[J] > 0. Based on the saddle-mode bifurcation theory, there is no zero eigenvalue of the Jacobian matrix and this condition corresponds to det[J] = 0. From Equation (69), the detuning parameter δ can be easily obtained.
5.2. Numerical Examples
In what follows we present some numerical examples based on particular cases corresponding to the above section.
Subcase 1.a. For μ = 0.001, a1 = 0.98, A3 = 0.09, A5 = −0.05, θ − 2δ = 1.1355∙10−5, we obtain D = 1.921258∙10−9, λ1 = −0.000378, λ2 = −0.000519 which confirm that the motion is stable.
Subcase 1.b. For μ = −0.001, a1 = 0.98, A3 = 0.09, A5 = −0.05, θ − 2δ = 1.1355∙10−5 it follows that D = −1.921258∙10−9,λ1 = 0.000519, λ2 = 0.000378 which proves that the motion is unstable.
Subcase 2.a. For a1 = 0.98, A3 = 0.09, A5 = 0.05, θ − 2δ = −0.00020945, one can get for μ = 0, D = −0.00146448∙10−6, and therefore the focal points are centers.
Subcase 2.b.In conditions of Subcase 2.a and μ = 0.001 one retrieves D = −0.0014662566 and λ1 = λ2 = −0.0005 such that the focal points are stable.
Subcase 2.c. For μ = 0.001, in conditions from Subcase 2.a, we have λ1 = λ2 = 0.0005 and the focal points are unstable.
Subcase 3.a. For a1 = 0.98, A3 = 0.09, A5 = 0.05, θ − 2δ = −1.13774∙10−5, we obtain, D = 0, and λ1 = λ2 = −0.0005for μ = 0.001. The nodes are stable.
Subcase 3.b. For μ = −0.001 in conditions from Subcase 3.a, it holds that λ1 = λ2 = −0.0005 and the nodes are unstable.
Subcase 3.c. For μ = 0 in conditions from Subcase 3.a, the motion does not exist.
We mention that for μ = 0, the expressions given by Equation (64) become
6. Global Stability by Lyapunov Function
The governing Equation (7) of damped, forced oscillator on the dynamics of EA can be written by adding control input
U in the form:
One defines the tracking errors
e1 and
e2 as
where
is the approximate analytical solution of Equations (7) and (10) above obtained by means of the OAFM, φ is a positive parameter and the control
U will be defined later.
If
are defined as estimated parameters, then the estimation errors of parameters are defined as [
25]:
The Lyapunov function is chosen in the form:
where
λj, j = 1, 2, …, 11 are positive parameters. The time derivative of Lyapunov function can be written, taking into consideration Equations (74), (75) and (76) in the form
We define the input control
U through Equation (77) as:
Then Equation (77) can be rewritten through Equation (75) in the form:
After some manipulations, Equation (79) becomes:
The estimate parameters
,
i = 1, 2, …, 5 which appear in the last equation are defined as:
or taking into account Equations (73) and (74):
In this way the Equation (80) becomes:
The positive parameter
defined in Equation (74) is chosen as
and therefore Equation (83) can be rewritten in the final form
It is clear that .
Using the Lyapunov function and La Salle’s invariance principle, the system studied in the present work is globally asymptotically stable since the function V is a positive defined function and dV/dτ is negative definite.
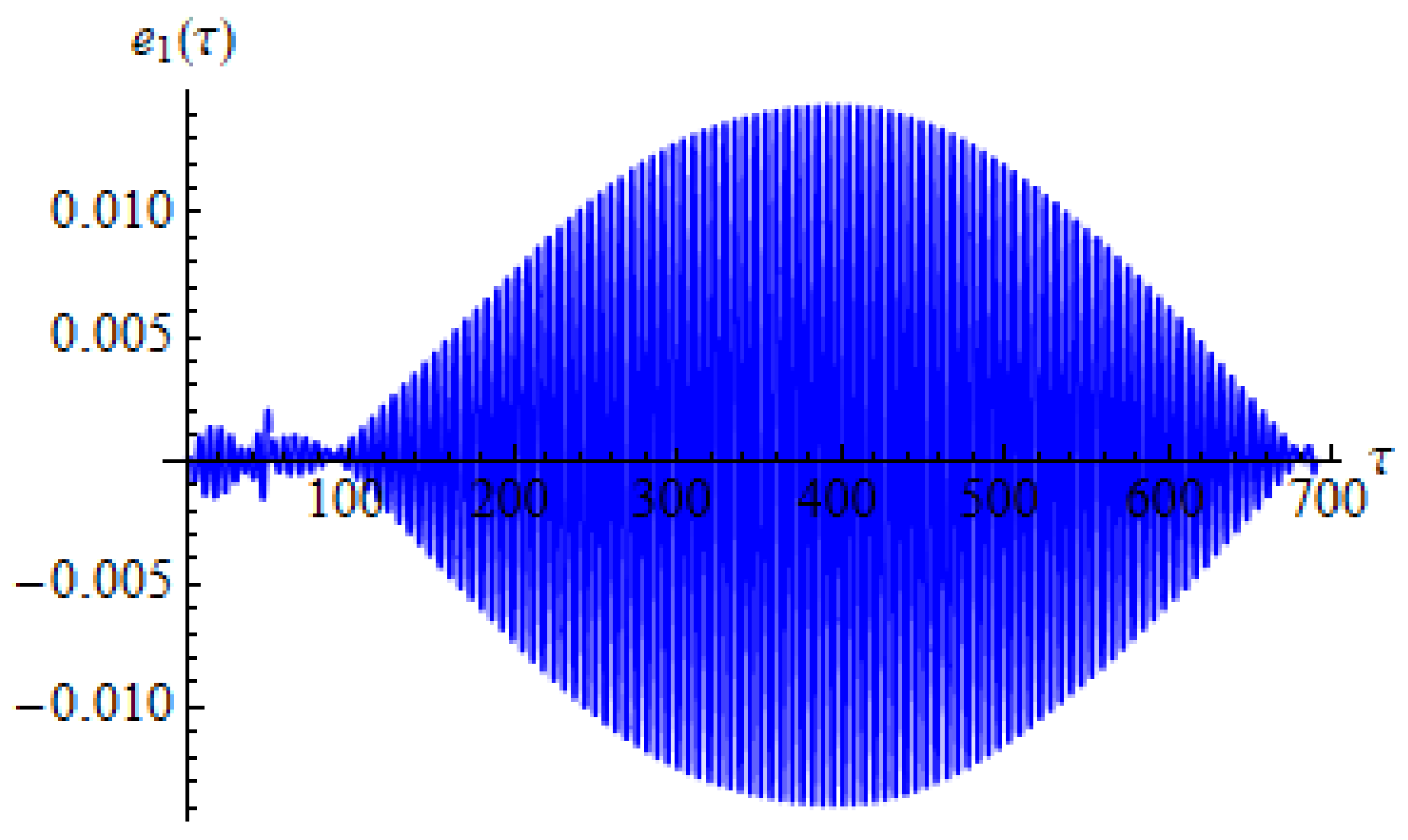
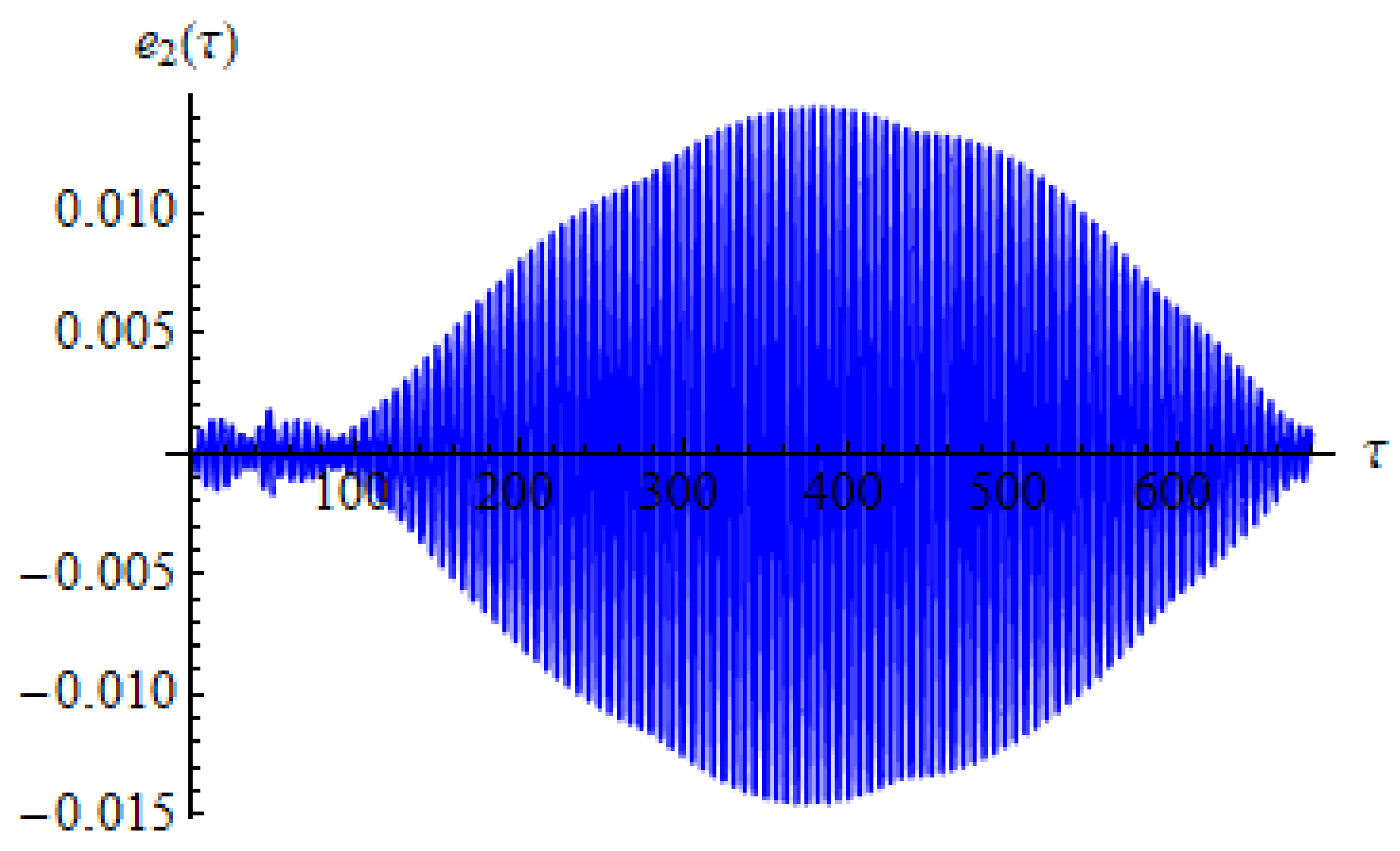
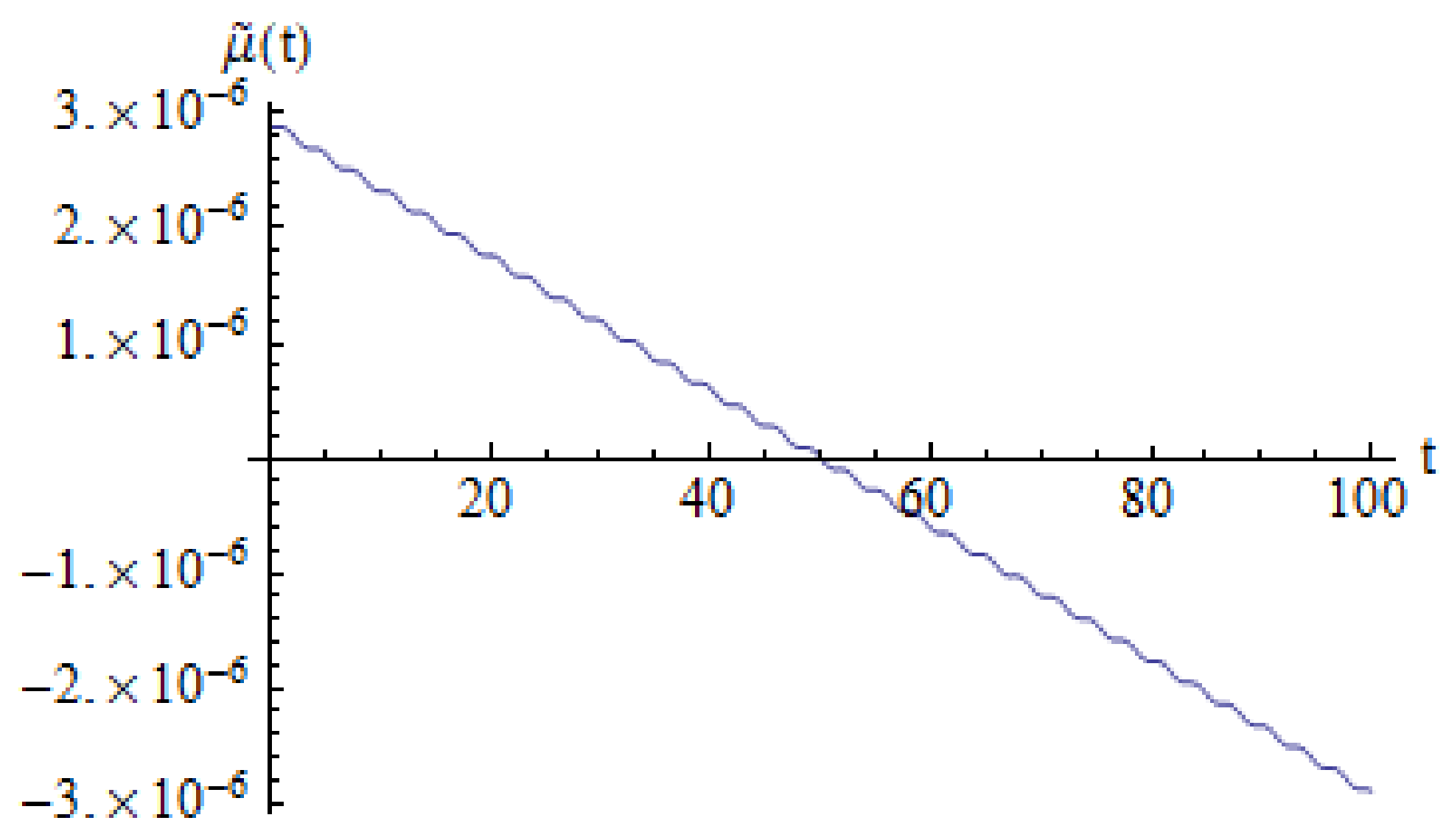
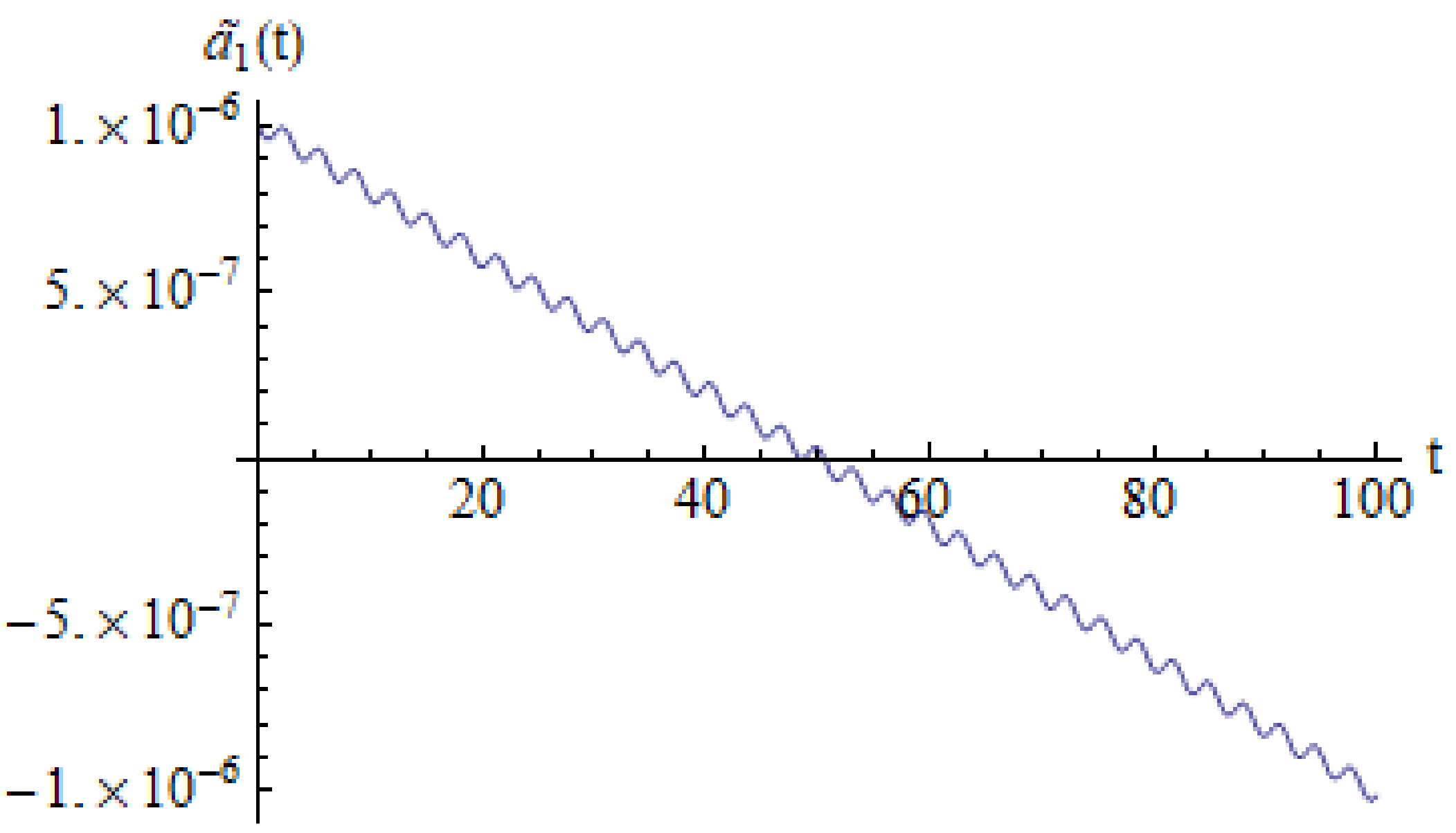
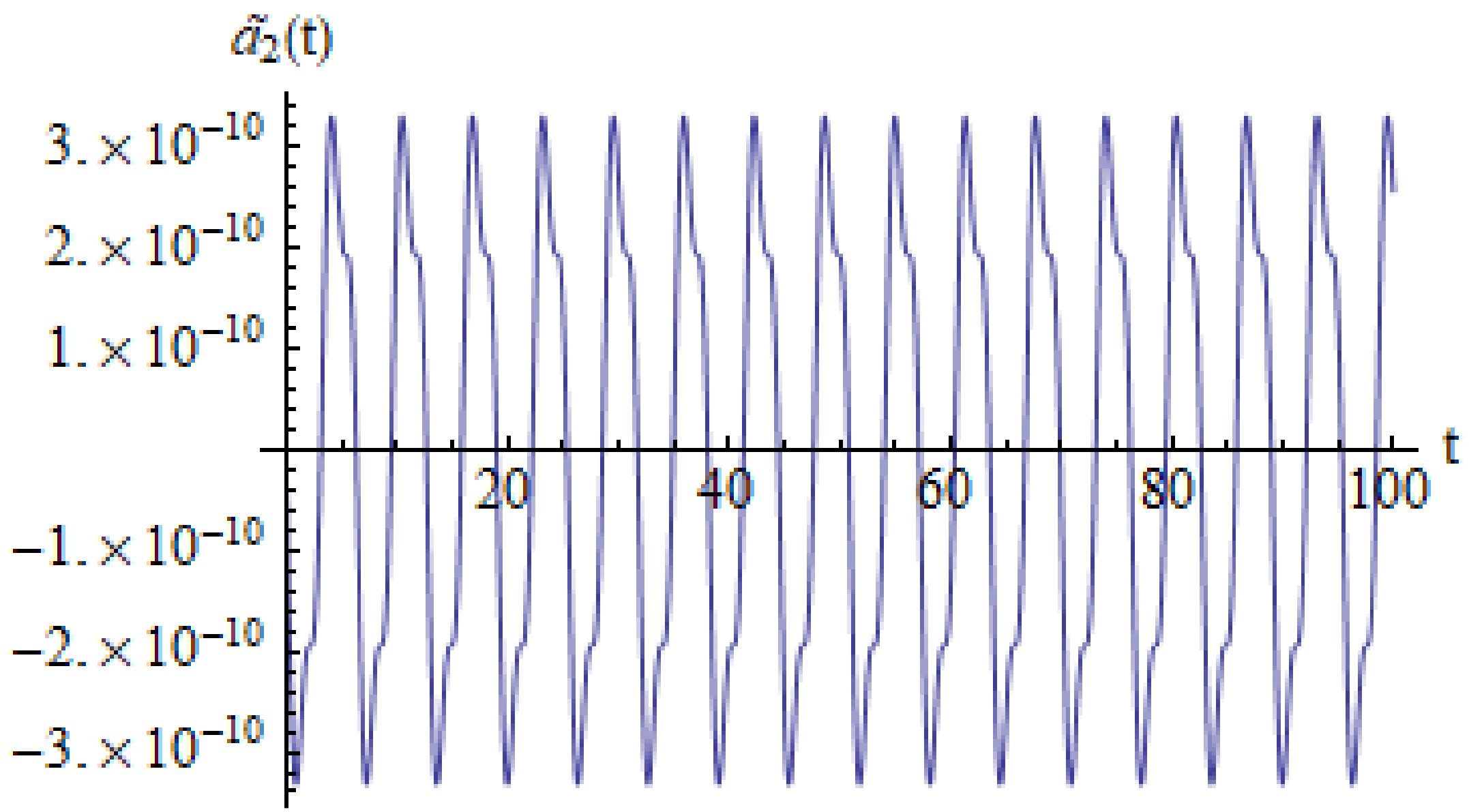
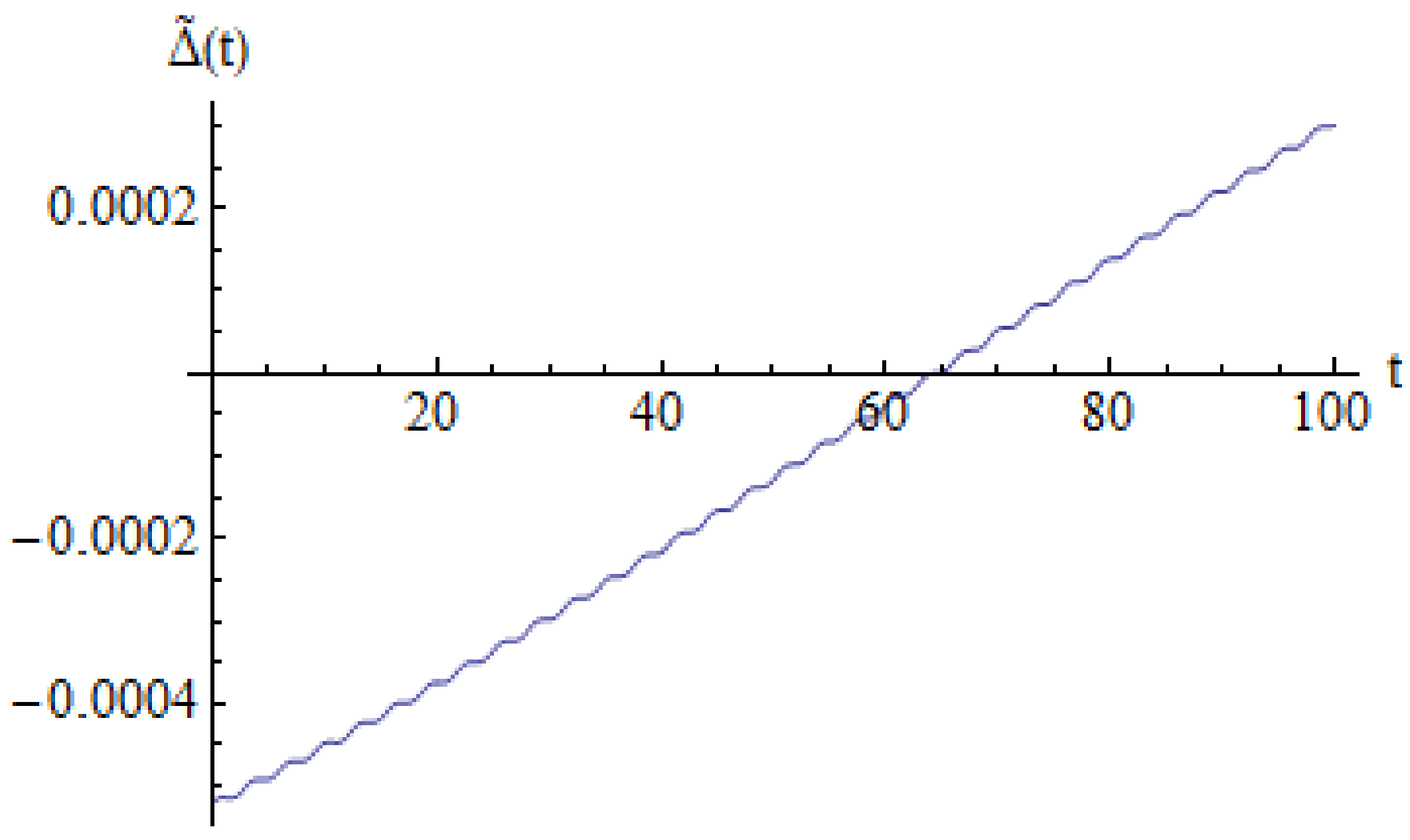
In
Figure 25,
Figure 26,
Figure 27 and
Figure 28 are depicted only the variations of the parameters
,
,
and
. In this way, it is clear that the Lyapunov function is well-defined.
The values of the errors e1 and e2 show that OAFM is a very efficient procedure and the estimate parameters show that the Lyapunov function can be practically determined, not only theoretically.
7. Conclusions
In the present work, the action of a vibro-impact nonlinear, damped, forced oscillator on the DC and AC electromagnetic actuation near the primary resonance is analyzed. The vibro-impact regime appears by the presence of Hertzian contact. This contact is supposed to be elastic and is maintained. The governing equation of motion is a nonlinear differential equation with variable coefficients. To find an approximate analytical solution of nonlinear differential equation we used a very accurate, effective and simple procedure, namely the Optimal Auxiliary Functions Method (OAFM). The governing equation is reduced to only two linear differential equations. The main novelties of our technique are the presence of so-called auxiliary functions, some convergence-control parameters, the construction of the two iterations, and the freedom to choose the procedure to determine the optimal values of the convergence-control parameters by applying rigorous mathematical procedures.
Also, we analyzed the local stability using some notions as the transformation averaging method, bookkeeping parameters, Jacobian matrix, or Routh-Hurwitz criteria. The borderline cases are presented for different values of the parameters. Global stability is studied by both Lyapunov function and La Salle’s invariance principle. These results lead to the conclusion that it is possible to control the nonlinear characteristics of the response near the primary resonance by tuning intensity of DC and AC electromagnetic actuation. Moreover, the proposed technique can be useful in certain engineering applications where the operating frequency range includes some critical frequencies that should be avoided.
Taking into account the proved performance of the OAFM technique, the proposed approach could be easily extended to other real practical applications from other fields of research, such as fluid dynamics, astronomy, mechanics, electrical machines, where nonlinear dynamical systems are involved.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



























