3. Conditions and Method for Improving Control
For the control
and the given parameter
, consider the auxiliary vector function:
where
is the projection operator onto a set
U in the Euclidean norm.
We will assume that the problem of projection onto the set U admits an analytical solution.
In accordance with the well-known property of the projection operator, we have the inequality:
For the Euclidean norm of a vector, the standard notation
is used.
For the auxiliary problem (
4), the known necessary optimality condition (Pontryagin’s maximum principle) for control
using a function
can be represented in the following form:
This condition is equivalent to the well-known condition of the maximum principle in the non-degenerate problem (
1)–(
3) for control
with a certain multiplier
. Controls that satisfy the condition of the maximum principle are called extremal controls for convenience.
Let the control
be a solution of the following system of equations:
It is obvious that
. From inequality (
8) and the increment formula (
5), we obtain an estimate for the increment of the Lagrange functional:
If
, then on the controls
, the Lagrange functional coincides with the objective functional. Then, by virtue of estimate (
10), there is an improvement in the objective functional
with the estimate:
For extremal control
in non-degenerate problem (
1)–(
3), system (
9) has an obvious solution
. Thus, if system (
9) for an extremal control
has a non-unique solution, then the extremal control
can be rigorously improved with estimate (
11).
Based on these properties, we obtain the following assertions.
Theorem 1 (maximum principle)
. Let the control be optimal in the non-degenerate problem (1)–(3). Then is a solution to system (9) for some . Theorem 2 (strengthened necessary optimality condition)
. Let the control be optimal in the non-degenerate problem (1)–(3). Then for all , the control is the only solution to system (9). Thus, system (
9) allows us to formulate a new necessary optimality condition in the non-degenerate problem (
1)–(
3), strengthened in comparison with the well-known maximum principle.
Theorem 3. System (9) is equivalent to the following boundary value problem:in which the partial derivatives with respect to x are calculated with the values of the arguments , , . Proof. If the control
with the corresponding multiplier
is a solution to system (
9), then the pair of functions (
,
),
with this multiplier is the solution to the indicated boundary value problem. Conversely, if a pair of functions (
,
),
with the corresponding multiplier
is a solution to the indicated boundary value problem, then the control
,
with this multiplier is a solution to system (
9). □
Consequence. For extremal control , the boundary value problem is always solvable.
Proof. The control
is a solution to system (
9) for some
. Then it follows from Theorem 3 that the pair of functions (
,
),
with this multiplier is a solution to the indicated boundary value problem. □
Let us consider the sequence of controls
,
, where the control
at
is the solution of the corresponding system (
9), in which the control
is considered instead of the control
. The sequence
is a non-increasing sequence:
. The value
for
characterizes the residual of the maximum principle on the control
in the non-degenerate problem (
1)–(
3). If
for
, then on the basis of estimate (
11) we obtain that the control
,
satisfies the condition of the maximum principle in the non-degenerate problem (
1)–(
3).
Thus, the following convergence assertion can be easily obtained.
Theorem 4. Let the functional in the non-degenerate problem (1)–(3) be bounded from below on the set W. Then the sequence , converges in the sense of the residual maximum principle: The system of control improvement conditions (
9) is considered as a special operator fixed-point problem with an additional algebraic equation in the space of available controls.
For a given
to solve system (
9), the following iterative process is proposed for
with initial control
for
:
The initial control
may not be an admissible control. At each iteration of the process, a special Cauchy problem is solved:
Then an auxiliary control is constructed according to the rule:
Using construction, we get:
As a result, an auxiliary control is determined that satisfies the first equation of system (
12) and depends on
. Hence, system (
12) reduces to an algebraic equation with respect to the unknown Lagrange multiplier
. It is assumed that the solution to this equation exists.
Thus, the main feature of the proposed iterative process is the satisfaction of the constraints of the optimal control problem at each iteration for .
The convergence of process (
12) is controlled by the choice of the projecting parameter
and can be proven under certain conditions similarly to [
26] for sufficiently small
based on the well-known principle of contraction mappings.
The iterative process (
12) is applied until the first improvement of the control
. Next, for the resulting control, a new fixed-point problem is constructed. The calculation of successive fixed-point problems ends if there is no improvement in control over the objective functional. Thus, an iterative method of fixed points is formed for constructing a relaxation sequence of admissible controls, i.e., satisfying the constraints of the problem. Satisfaction of the constraints of the problem at each iteration of successive approximations of the control is achieved by choosing the Lagrange multiplier. This allows us to effectively solve the fundamental problem of choosing the Lagrange multiplier and narrow the dimension of the search space for improving controls to the space of admissible controls in optimal control problems with constraints.
In optimal control problems, the convergence of relaxation sequences of controls in terms of the residual of the maximum principle, which can be defined in different ways, is often studied [
25]. One of the ways to determine the residual of the maximum principle was indicated above. Under certain conditions, it is possible to prove the convergence of the relaxation sequence of admissible controls in terms of the residual of the maximum principle in the non-degenerate problem (
1)–(
3), which is generated with the proposed method of fixed points for a sufficiently small
.
4. Examples
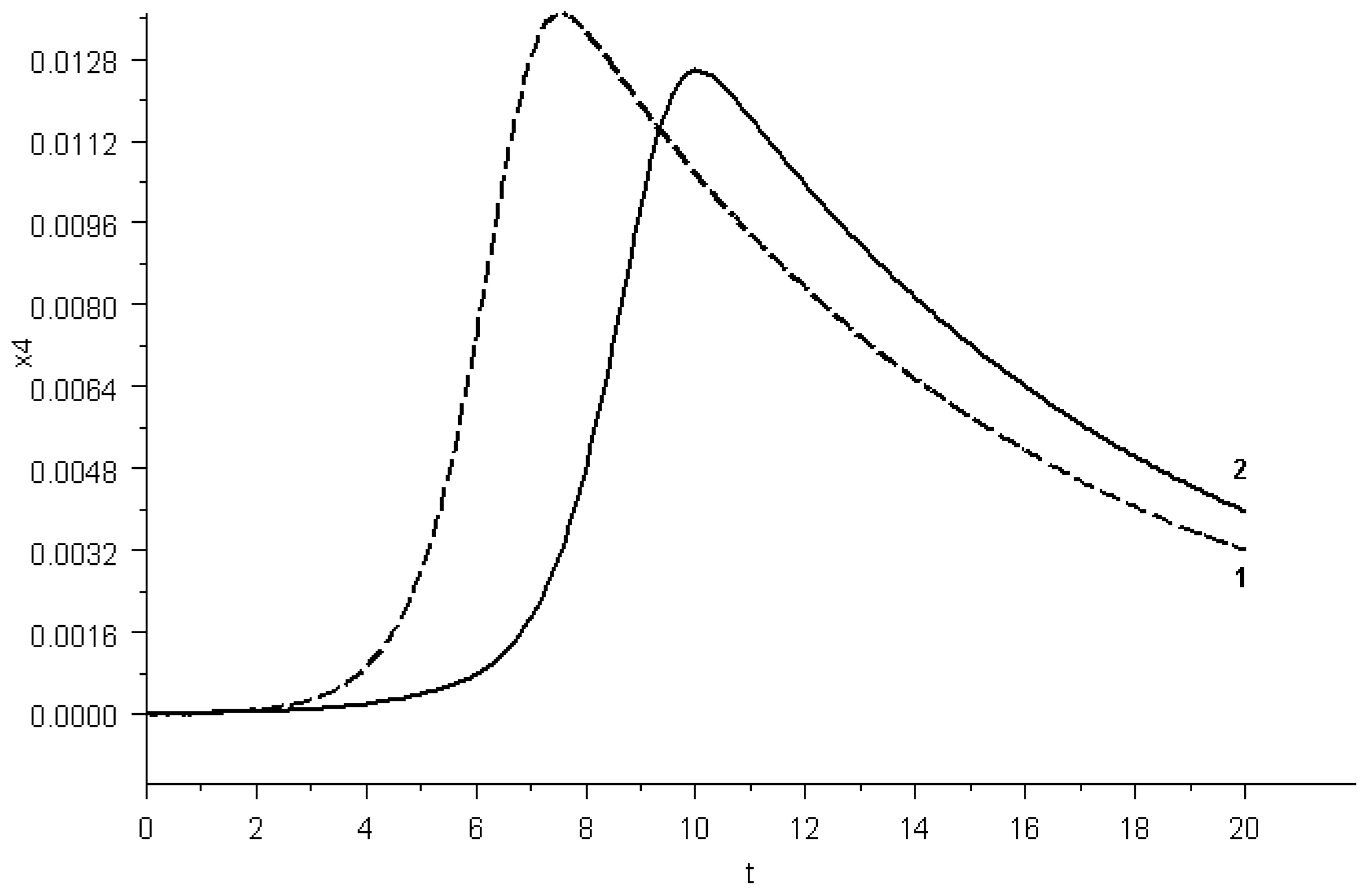
Example 1. The comparative efficiency of the proposed fixed-point method is illustrated in a model example of the problem of optimal control of the immune process without delay. In accordance with works [7,9], the model of a controlled system in a dimensionless form can be represented as:The variable characterizes the infectious pathogen (virus), and the variables , characterize the organism’s defenses (antibodies and plasma cells, respectively). The variable characterizes the degree of damage to the organism, , are given constant coefficients. The initial conditions simulate the situation of infection of the organism with a small initial dose of the virus at the initial moment . The control characterizes the intensity of the introduction of immunoglobulins that neutralize the virus. The control
corresponds to the case of no treatment using the introduction of immunoglobulins. This model situation corresponds to an acute illness with recovery at the following values of the coefficients [
7]:
The unit of time corresponds to one day.
The purpose of the control is to minimize the value of the virus by the end of treatment with the introduction of immunoglobulins with the condition of limiting the indicator of damage to the organism at a given time interval:
The considered limitation (
14) is important in modeling the acute form of a viral disease when the consequences of damage to the organism cannot be neglected.
The value of the maximum intensity of the control action was set equal to . The time interval T was set to be equal to 20 days: . The value of the maximum damage to the organism was chosen to be equal to .
We introduce an additional variable according to the rule:
Then the integral constraint (
14) reduces to the terminal constraint:
In numerical calculations of the problem with constraint (
14), the validity of the activity property of inequality (
14) was established. As a result, the problem of the considered class was studied:
The Pontryagin function in problem (
13), (
15)–(17) is represented as:
To solve problem (
13), (
15)–(17), we used the proposed method of fixed points (M2) based on the iterative process (
12) and the well-known method of penalty functionals (M1) with the objective functional of the following form:
where
,
is a given penalty parameter.
Auxiliary penalty problems (
13), (
15) and (
18) were calculated using the well-known conditional gradient method [
28]. As a criterion for stopping the calculation of the penalty problem for a fixed value of the penalty, parameter
condition was chosen:
where
is an iterative index of the conditional gradient method,
.
After reaching stopping criterion (
19), the fulfillment of the terminal constraint was checked:
where
is the specified accuracy.
If condition (
20) was not satisfied, then a new penalty problem was calculated with the penalty parameter:
The initial value of the penalty parameter
was set equal to
.
When calculating a new penalty problem using the conditional gradient method, the resulting computational control in the previous penalty problem was chosen as the initial approximation. The calculation using the M1 method ended with the simultaneous fulfillment of conditions (
19) and (
20).
To implement the proposed method M2, we consider the auxiliary regular Lagrange functional with a multiplier
:
The modified conjugate system (
6) takes the form:
For available controls , the function , is the solution of the modified conjugate system for , , , .
Auxiliary vector function
based on the projecting operation is determined with the formula:
The fixed-point problem (
9) to improve the available control
takes the form:
For a given
iterative process (
12) for
with an initial available control
for
has the form:
At each iteration of process (
22), a special Cauchy problem is solved:
with the simultaneous calculation of the auxiliary control:
The resulting control, which depends on the Lagrange multiplier, satisfies the first equation of system (
22).
To solve the corresponding algebraic equation of system (
22) with respect to the Lagrange multiplier, the
dumpol procedure from the Fortran software package [
29] was used, which implemented the deformable polyhedron method. The accuracy of solving the equation was chosen to be equal to
, which corresponded to the accuracy of criterion (
20).
For a given
iterative process (
22) was carried out until the first fulfillment of the condition:
In this case, to improve the resulting control, a new problem (
21) and algorithm (
22) were constructed. In this case, as an initial approximation of the control at
for iterative process (
22), the resulting computational control was chosen.
Thus, starting from the second computational improvement problem (
21), the sequence of computational controls forms a relaxation sequence of controls that satisfy constraint (17) with a given accuracy.
If a strict improvement of the control in the process of iterations (
22) was not achieved, then the numerical calculation of fixed-point problem (
21) was carried out until the condition:
where
. This was the end of the construction and calculation of sequential fixed-point problems for improving control.
As a starting initial approximation in both methods M1 and M2, the control was chosen.
The comparative results of calculations using the considered methods are shown in
Table 1 in which
is the calculated value of the objective functional of the problem,
is the modulus of the calculated value of the functional corresponding to constraint (17), and
N is the total number of solved Cauchy problems. The note for the M1 method gives the value of the penalty parameter, which provided the specified accuracy of the terminal constraint (
20). For proposed method M2, the note indicates the specified value of projection parameter
, which ensures the convergence of the iterative process (
22).
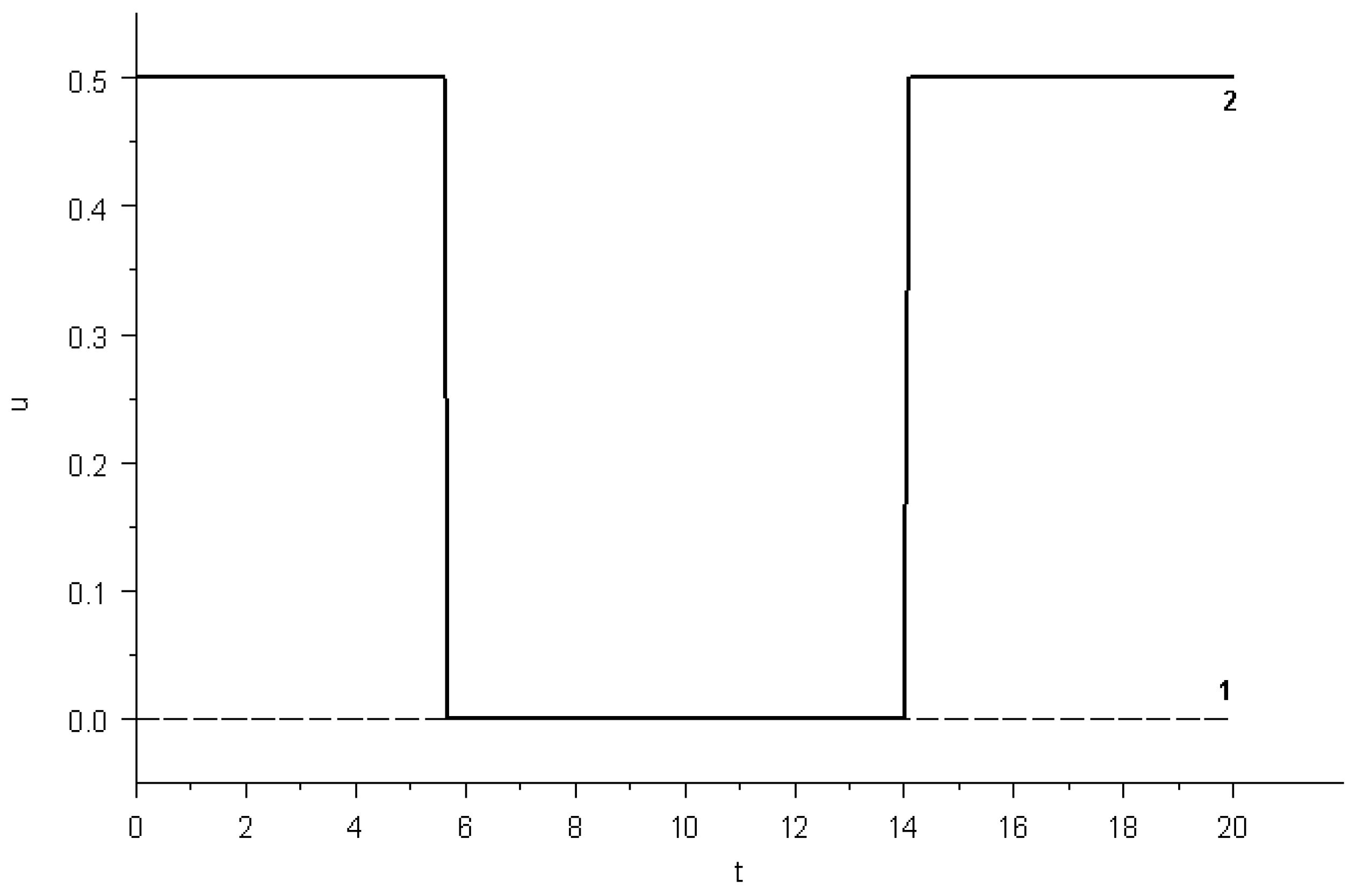
The computational control in methods M1 and M2 is a piecewise-constant function with an accuracy of up to a day with a switching point at the moment from the maximum value to the minimum value equal to zero with reverse switching at moment .
According to the optimal strategy for the treatment of an acute disease, taking into account the limitation of the severity of the disease, it is necessary to administer immunoglobulins with maximum intensity at the initial stage of the disease in order to reduce the severity of the disease when the organism’s immune response is still weak. Then, as the organism’s defenses are formed, it is necessary to stop the administration of the drug so that the immune response is formed in full force by the type of feedback on the pathogen. At the last stage, corresponding to the recovery of the organism, immunoglobulins must be administered again with maximum intensity in order to achieve a minimization of the virus value by the end of the specified treatment interval. Previously, a similar strategy for treating the disease using the exacerbation method was proposed and tested in the course of the computational model experiments in [
7]. The formulation of tasks for the optimal management of the treatment of a disease makes it possible to substantiate and effectively regulate the process of treatment using the exacerbation method.
Within the framework of a model example, the proposed method of fixed points provides a significant reduction in computational complexity compared to the standard method of penalty functionals, which is estimated using the total number of Cauchy computational problems.
Example 2. The comparative efficiency of the proposed fixed-point method is illustrated with the example of the well-known model problem of satellite rotation stabilization [30,31], which is considered in the following formulation: The equations of the system describe the dynamics of the rotation of a satellite equipped with three jet engines. The controls characterize fuel consumption. The minimized functional from the control reflects the goal of achieving a state characterized by the absence of satellite rotation (stabilization).
The Pontryagin function in problem (
23)–(25) is represented as:
To solve problem (
23)–(25), we used the proposed method of fixed points (M3) based on the iterative process (
12) and the known method of penalty functionals with the objective functional in the following form:
where
,
is a given penalty parameter.
Auxiliary penalty problems (
23) and (
26) were calculated using the well-known conditional gradient method (M1) and gradient projection method (M2) [
28]. As a criterion for stopping the calculation of the penalty problem for a fixed value of the penalty parameter, the following condition was chosen:
where
is an iterative index of conditional gradient and gradient projection methods,
.
After reaching the stopping criterion (
27), the fulfillment of the terminal constraint was checked:
where
is the specified accuracy.
If condition (
28) was not satisfied, then a new penalty problem was calculated with the penalty parameter:
The initial value of the penalty parameter
was set equal to
.
When calculating a new penalty problem using the M1 and M2 methods, the resulting computational control in the previous penalty problem was chosen as the initial approximation. The calculation using methods M1 and M2 ended when conditions (
27) and (
28) were simultaneously satisfied.
To implement the proposed M3 method, an auxiliary regular Lagrange functional with the multiplier
was considered:
First, problems (
23)–(25) were reduced to forms (
1)–(
3) by introducing an auxiliary variable
. After compiling the modified conjugate system and excluding the corresponding conjugate variable
from it, the modified conjugate system takes the form:
For available controls , the function , is the solution of the modified conjugate system for , , .
Auxiliary vector function
based on the projecting operation is determined with the formula:
where
Fixed-point problem (
9) to improve the available control
takes the form:
For a given
iterative process (
12) for
with an initial available control
for
has the form:
At each iteration of process (
30), a special Cauchy problem is solved:
with the simultaneous calculation of the auxiliary control:
The received control, which depends on the Lagrange multiplier, satisfies the first equation of system (
30).
To solve the corresponding algebraic equation of system (
30) with respect to the Lagrange multiplier, the
dumpol procedure from the Fortran software package [
29] was used, which implements the deformable polyhedron method. The accuracy of solving the equation was chosen equal to
, which corresponds to the accuracy of criterion (
28).
For a given
, iterative process (
30) was carried out until the first fulfillment of the condition:
In this case, to improve the resulting control, a new problem (
29) and algorithm (
30) were constructed. In this case, as an initial approximation of the control at
for the iterative process (
30), the resulting computational control was chosen.
Thus, starting from the second computational improvement problem (
29), the sequence of computational controls forms a relaxation sequence of controls that satisfy constraint (25) with a given accuracy.
If a strict improvement of the control in the process of iterations (
30) was not achieved, then the numerical calculation of the fixed-point problem (
29) was carried out until the condition:
where
. This was the end of the construction and calculation of sequential fixed-point problems for improving control.
As a starting initial approximation in all methods, we chose the control .
Comparative results of calculations using the considered methods are shown in
Table 2 in which
is the calculated value of the objective functional of the problem,
is the modulus of the calculated value of the functional corresponding to constraint (25),
N is the total number of solved Cauchy problems. The note for the M1 and M2 methods gives the value of the penalty parameter, which provided the specified accuracy of the terminal constraint (25). For proposed method M3, the note indicates the specified value of the projection parameter
, which ensures the convergence of the iterative process (
30).
In the framework of Example 2 with multidimensional control, the proposed method of fixed points provides a significant reduction in the computational complexity, which is estimated by the total number of Cauchy computational problems compared to the known gradient methods based on penalty functionals.
Example 3. The considered example illustrates the possibility of the rigorous improvement of a non-optimal control that satisfies the maximum principle using the proposed fixed-point method. Gradient methods do not have this capability. The Pontryagin function has the form:
For a control
and a given parameter
, an auxiliary vector function
based on the projecting operation takes the form:
A simple analysis of the problem, taking into account its reduction to the form (
1)–(
3) shows that the problem under consideration is non-degenerate and the maximum principle condition for control
for some
can be represented in the following projection form:
where the function
,
is the solution of the standard conjugate system:
for
,
. The control
,
, is a non-optimal extremal control. Wherein
,
,
.
The improvement problem for control
based on the regular Lagrange functional
has the following form:
where the function
,
is the solution of the modified conjugate system:
for
,
,
. From this we obtain that for the extremal control
,
the function
,
is the solution of the modified conjugate system:
for
,
.
System (
31) for improving the extremal control
,
is an equivalent boundary value problem:
In accordance with Theorem 3, the pair of functions
,
,
with
is an obvious solution to this boundary value problem.
A simple analysis shows that this boundary value problem for
has solutions of the following form with
:
These solutions of the boundary value problem correspond to the solutions of system (
31):
with the corresponding values of the objective functional
.
Thus, system (
31) at
for extremal control
has a non-unique solution, and extremal control
is strictly improved on other solutions of system (
31) at
.
Let us show the possibility of a rigorous improvement of the extremal control using the proposed fixed-point method with the parameter .
The iterative process for solving system (
31) takes the form
As an initial approximation of the iterative process (
32), we consider the available control
,
, which corresponds to the phase trajectory
,
. In that case, the function
,
is the solution of the modified conjugate equation:
The solution to this equation is the function:
Let us assume that
,
. Then the corresponding Cauchy problem for the phase system takes the form:
The solution to this equation is the function:
The condition
determines the value of the Lagrange multiplier
. This gives us a function:
which satisfies the condition
,
.
From here, we get the control:
This control corresponds to the phase trajectory
,
and the value of the objective functional:
Thus, the fixed-point method already at the first iteration makes it possible to strictly improve the non-optimal extremal control . The possibility of a rigorous improvement of the extremal control appears due to the available choice of the starting initial control , which differs from the extremal control. There is no such choice in gradient methods.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}