1. Introduction
People generally live in various complex networks, such as transportation networks, information networks, power grids, and so on. Synchronization is a representative collective behavior of complex networks, which has a prominent theoretical meaning and extensive practical applications in non-fragile filtering, topology recognition, system stability, encryption, and decryption [
1,
2,
3,
4,
5]. Recently, numerous synchronization modes have been discussed in depth, incorporating complete synchronization [
6,
7], cluster synchronization [
8,
9], quasi-synchronization [
10,
11], projective synchronization [
12,
13], exponential synchronization [
14,
15,
16], etc. Regrettably, considering a complex network could have multi-links, many publications for synchronization analysis mainly concern complex networks including only a single link, making it difficult to portray the real network precisely. Multi-links mean that there may exist more than one path between each pair of nodes and that each pair has its special attributes. For instance, in the transportation networks, there are significant differences in carriage delays and connectivities among aviation networks, land networks, and waterway networks, which indicates single-link systems cannot characterize such types of multichannel transportation networks well (see
Figure 1). For a human connection network, there are different communication tools, including e-mail, telephone, and Facebook. Obviously, this network represents a characteristic multi-link model that cannot be expressed by a single-link system. Hence, it is necessary to further study multi-links systems owing to their universality. Recently, some scholars have noticed various synchronization problems in such networks [
17,
18,
19]. In [
17], Zhou et al. discussed the exponential synchronization of stochastic complex dynamical networks including multi-links. In [
18], Guo et al. considered the synchronization of multi-link networks with switching signals in finite time. In [
19], Xu et al. gained impulsive synchronization conditions for multi-link dynamical systems embedding non-integer order effects. It should be pointed out that the effect of time delays was not considered in these multi-link models mentioned above.
In a multi-link network, the delay cannot be avoided due to the influence of network width, congestion, and transmission distance. Considering the significant differences between subnetworks, each subnetwork often has different time delays. Observing a transportation network, which usually consists of the aviation network, highway network, and railway network, each subsystem possesses different vehicle speeds and link types, which means the time delays in each coupling structure of subnetworks may not be the same. To construct a more practical system, in [
20], delays in the coupling state were discussed in the multi-link networks. In [
21], the authors explored synchronization problems for memristor-based multi-link systems containing leakage delays. In [
22], Zhou et al. considered the synchronization of delayed multi-link dynamical systems including non-monolayer coupling. In [
23,
24], two types of delays including internal and coupling delays were discussed in the time-varying multi-link systems, and several synchronization criteria could be gained with the aid of different differential inequalities.
In addition, systems in real environments often encounter various stochastic disturbances, and these disturbances may disrupt the steady state of systems or cause asynchronization [
25]. As a consequence, when modeling a delayed complex network, stochastic disturbances should not be left out. Up to now, several relevant synchronization results paid attention to such phenomena. For example, in [
26], Zhou et al. considered the intermittent synchronization of non-strong connectivity networks comprising time-varying delays and stochastic disturbances. In [
27], Shi et al. studied the sampling synchronization for memory neural networks with random network attacks in finite time. In [
28], Zhang et al. gained sufficient conditions of exponential synchronization for delayed stochastic systems by impulsive technologies. In [
29], Liu et al. dealt with the inner synchronization issue for stochastic impulsive networks. Note that these works were considered for single-link stochastic complex systems rather than multi-link stochastic systems. To study the effect of stochastic perturbations on multi-link systems, Zhao et al. [
30] investigated projective synchronization for multi-link dynamical networks including stochastic disturbances, where system delays are neglected. As we know, studies on the mean square synchronization of uncertain multi-link dynamical networks incorporating stochastic noise and hybrid time-varying delays are sparse, which is the first motivation for this study.
It is necessary to exert external control over the network to achieve network synchronization since many networks cannot achieve synchronization only by relying on the coupling between different nodes. From the point of time series, the mainstream control mechanism consists of two types. One is continuous control, for instance, feedback control [
31], and adaptive control [
32]. Another is discrete control, such as intermittent control [
33], and impulsive control [
34]. As a kind of discontinuous input method, impulsive control is only activated at some finite time points, efficiently reducing the control time and increasing the synchronization security [
35]. For example, Tang et al. [
36] attained the synchronization criteria for derivative-coupled systems utilizing impulsive control schemes. By constructing the impulsive comparison principle, the authors in [
37] dealt with the impulsive synchronization problems of dynamical networks incorporating delays without bounds. Generally, it is impractical to control all nodes in the network because complex dynamic networks are often large-scale. Pinning control is an efficient method because it can control the whole system by pinning a small fraction of network nodes instead of all nodes. Naturally, pinning impulsive control, which integrates the superiorities of pinning control and impulsive control, can be more efficient to achieve synchronization since it only needs to control a few nodes at several discrete instants. At present, many previous results about synchronization have been obtained by pinning impulsive control strategies. Specifically, the impulsive effect is always assumed to satisfy
[
38],
[
8,
39],
[
40], or other homologous restricted intervals, which implies only impulsive effects profiting synchronization are considered. In reality, when network nodes transmit information to each other, impulses can act on beneficial and harmful effects, which means that various types of impulses should be considered meanwhile. For multi-link complex networks, very few works considered both synchronizing impulse and desynchronizing impulse, which forms the second reason for researching this article. These comprehensive factors including uncertainties, stochastic characteristics, and various delays in multi-link complex networks pose new challenges to the study of system synchronization. Our research focuses on utilizing the positive and negative effects of impulses for solving this difficulty.
Enlightened by the literature above, this study considered the impulsive synchronization of uncertain stochastic multi-link complex networks involving hybrid delays utilizing hybrid control schemes. To be more authentic, nonlinear couplings are introduced and uncertainties are time-varying. The principal highlights of this study contain three parts. Firstly, time-varying factors, including internal delays, coupling delays, stochastic noise, and uncertain disturbances, are incorporated into our model, which makes the results obtained in this paper exceed the previous related works. Secondly, discriminating from the impulsive effects in [
8,
38,
39,
40], synchronizing impulses, and desynchronizing impulses are first applied to multi-link systems in this study, i.e., the scopes of impulsive strength need not be restricted, regardless of whether the impulses are beneficial or harmful to the synchronization state. Lastly, some novel synchronization criteria for the generalized multi-link network models are obtained based on the hybrid pinning impulsive control methods and matrix decomposition techniques.
Besides the introduction part,
Section 2 introduces the mathematical model description of uncertain stochastic multi-link systems.
Section 3 studies the hybrid impulsive pinning control for mean square synchronization of the concerned multi-link systems.
Section 4 gives a simulation experiment for validating purposes, and
Section 5 presents the conclusion.
Notation 1. represents the n-dimensional real space with Euclidean norm . stands for the maximum eigenvalue of matrix B. stands for a diagonal matrix. For matrices and , can be computed as 2. Model Introduction and Preknowledge
The uncertain multi-link complex networks incorporating stochastic characteristics and hybrid delays could be modeled as
where
and
is the state vector of node
i,
is a diagonal matrix with
.
and
are the non-delayed and delayed connection weight matrices, respectively.
, and
denote the uncertain matrices.
and
represent the activation functions at time
t.
is the positive coupling strength for the
kth coupling form.
=
stands for the
kth coupling nonlinear function.
represents the
kth inner coupling matrix.
represents the
kth coupling configuration matrix, where
is defined as follows: if there is a link from node
i to node
j, then
; otherwise,
. Moreover, assume that
satisfies the diffusive coupling condition
. The time-varying delays
and
are the bound functions, i.e.,
,
, in which
denotes the internal or stochastic delay and
denote the coupling delays, respectively.
represents a bounded Weiner process, which satisfies
,
and
for
.
stands for the noise intensity function matrix, satisfying
.
Remark 1. To our knowledge, most multi-layer neural networks in engineering are multi-link since each layer can be regarded as a subnetwork. Multi-layer neural networks have been successfully utilized in various aspects, such as visual analysis, behavior recognition, machine learning, etc. Unfortunately, very few works have investigated hybrid impulsive pinning synchronization problems concerning uncertain multi-link stochastic networks including two impulses, and we try to solve these problems in this study.
Let
be an arbitrary solution of an isolated node of system (
1), which could be given by
Define
be the synchronization error of node
i between the current state
and the objective state
. By imposing impulsive effects on the pinned nodes, the impulsive pinning controllers can be considered as
where
represents the impulsive strength at each discrete instant
.
denotes the well-known Dirac delta function. The impulsive instants
meet
as
.
stands for the set of pinned nodes at
, and it is defined as
- (i)
We can reset the errors for . If , then .
- (ii)
We can reset the errors
for
. If
, then
. Noting that
, and adding the impulsive effects to multi-link networks (
1), one can get the following error system:
where
,
,
and
,
. Moreover, the initial values of error dynamical system (
4) are presumed to be
, where
and
.
Remark 2. Considering , i.e., , impulsive influences are harmful to the synchronization process of dynamical system (4), which leads to the synchronization error increases large with time evolution, so they are called desynchronizing impulses. Conversely, considering , i.e., , impulsive influences are helpful to the synchronization process of dynamical system (4), and they are called synchronizing impulses. Especially, if , impulsive influences are neither detrimental nor helpful for achieving synchronization. This study only explores the first two impulses, and one can easily extend them to . Remark 3. To characterize synchronizing and desynchronizing simultaneously, we assume that the strengths of desynchronizing impulse select from a limited set . Meanwhile, the strengths of synchronization impulse select from .
Next, some useful preliminary knowledge is introduced.
Assumption 1. For the activation functions , , constants , exist, such thatfor any and , . Assumption 2. The parametric uncertainties and can be expressed bywhere are constant matrices and the unknown matrix meets . Assumption 3. For the nonlinearly-coupled functions , constants exist and , such thatfor any . Remark 4. Especially, when , one can obtain the following inequality Assumption 4. Assume that the intensity function conforms to the following requirement:, where , represent suitable constant matrices. Assumption 5. There are positive numbers and satisfyingandfor , where and represent the amount of the synchronizing impulsive sequence and desynchronizing impulsive sequence on the interval , respectively. Definition 1. Under mean square sense, the controlled multi-link complex networks (1) can be known as exponential synchronization, if positive constants λ, and θ exist such thatfor all and initial values , . Lemma 1 ([
41]).
For any real matrices and with correct dimensions, a scalar exists such that Lemma 2 ([
42]).
Let be nondecreasing in for each fixed , and be nondecreasing in v. Assume meetandThen, for means for 0. 3. Main Results
Before giving the main theorem, the meaning of two important symbols needs to be explained. Let where consist of the diagonal elements of , and preserves the off-diagonal elements of .
Theorem 1. Assume that Assumptions 1–5 hold. Under the mean square sense, controlled multi-link networks (1) can be globally exponentially synchronized to the target :if positive scalars and exist, such that the following conditions hold: - (i)
- (ii)
- (iii)
- (iv)
where , , , , , , , , , and λ is a sole root of .
Proof. Let
. Construct the following Lyapunov function:
Then, for any
, utilizing It
-differential formula, one can obtain
Utilizing Assumptions 1 and 2 and Lemma 1, one can find positive constants
and
such that
and
In addition, one can obtain
By Assumption 3 and the decomposition express
, we have
and
where
.
Substituting (
7)–(
13) into (
6), one can obtain
Using conditions (i)–(iii) in Theorem 1, we obtain
Next, our goal is to obtain the relation between
and
such that the results conform to the structure of Lemma 2. When
, we can derive
First, we study the situation of
. By obtaining
, then one can gain
From (
19), one can future obtain the following inequality
Combining (
16) and (
20) gives that
. Similarly, we study the case of
. Obtaining
, we can then obtain
From (
23), one can future obtain the following inequality:
Combining (
16) and (
24) gives that
. Thus, we can obtain
, where
For any
, set
be the only solution for the differential systems below.
One can easily demonstrate that
. Based on Lemma 2, we can derive
for
. Using the technology of parametric variation, we can obtain
where
stands for the Cauchy matrix of the equation below:
Let
. Based on Definition 1, one can obtain
where
, and
.
Let
, it follows from (
27) that
Let . Based on condition (iv), one has . It is clear that and . Therefore, there exists a sole root satisfying the equation . Note condition (iv) and , for , one has .
Next, we shall demonstrate the following inequality:
Assume that (
31) does not hold; then there is a
satisfying
and
where
.
Combining (
30) and (
33) gives
which contradicts inequality (
32). Hence, inequality (
31) is correct. Let
, then
for
. Noting that
, one can obtain
. Since
is a positive constant, the controlled multi-link networks (
1) can achieve globally exponential synchronization. □
Remark 5. The scale of the pinned node can be obtained from the equation . Since desynchronizing impulses and synchronizing impulses are introduced in the controller (3), the control scheme in this article can be called the hybrid impulsive pinning control. Remark 6. Discriminating from the existing works in multi-link systems [17,18,19,20,21,22,23,24], the impulse strength and position change with time evolution. The positive roles and negative roles of impulses are studied simultaneously. Moreover, stochastic noise, hybrid time-varying delays, and uncertainties are considered in this paper, making our results more generalized than related articles. Remark 7. In the existing literature, the range of impulsive effects is usually limited, such as [38], [8,39], [40], which means only positive roles for the synchronization are considered. Unlike these methods, the impulsive gain in this article can be selected from , and not only positive roles but also negative roles are considered. Our impulsive pinning control strategy can effectively reduce the scale of control nodes and control time, thereby saving control costs. When uncertain disturbances are not considered, dynamical networks (
1) could be rewritten as
where
Accordingly, the target trajectory
satisfies
Then, one can easily get a corollary below.
Corollary 1. Assume that Assumptions 1, 3–5 hold. Under mean square sense, controlled multi-link networks (1) can be globally exponentially synchronized to the target :if there exist positive scalars and , such that the following inequalities hold: - (i)
- (ii)
- (iii)
- (iv)
where , , , , , , , ,, and λ is a sole root of .
When stochastic noise is not considered, dynamical networks (
1) could be rewritten as
where
Accordingly, the target trajectory
satisfies
Then, one can obtain the corollary below.
Corollary 2. Assume that Assumptions 1–3, 5 hold. Under mean square sense, controlled multi-link networks (1) can be globally exponentially synchronized to the target :if positive scalars and exist, such that the following inequalities hold: - (i)
- (ii)
- (iii)
- (iv)
where , , + , , , , , , , and λ is a sole root of .
4. Numerical Simulations
To illustrate the theorem in this study from an experimental point of view, a numerical simulation will be implemented next. First, consider the following isolated node of the network incorporating stochastic noise, which can be formulated as
where
. The non-delayed activation function is
, while the delayed activation function is
. A simple calculation shows that Assumption 1 can be satisfied when
. Respectively, the diagonal matrix
A and the connection weight matrices
are designated as
The uncertainty matrices and relevant parameters corresponding to the above matrices could be set as
One can find that the above uncertain matrices make Assumption 2 satisfied. The noise intensity function could be given by
, which satisfies
. Hence, Assumption 4 holds for
. The multi-link stochastic complex dynamical networks including 100 nodes are described as
where
,
, and
. The nonlinear coupling function is
,
,
. One can find Assumption 3 holds based on the characteristic of
. Assume that the network topology of these sub-networks (i.e.,
,
, and
in systems (
40) satisfying the E-R network model, and the connection probabilities are set as 0.2, 0.25, and 0.3, respectively. For simplicity, let
,
,
; by simple calculation, we can obtain that
,
. Hence, when we set
, one can derive
, and all the circumstances in Theorem 1 are satisfied.
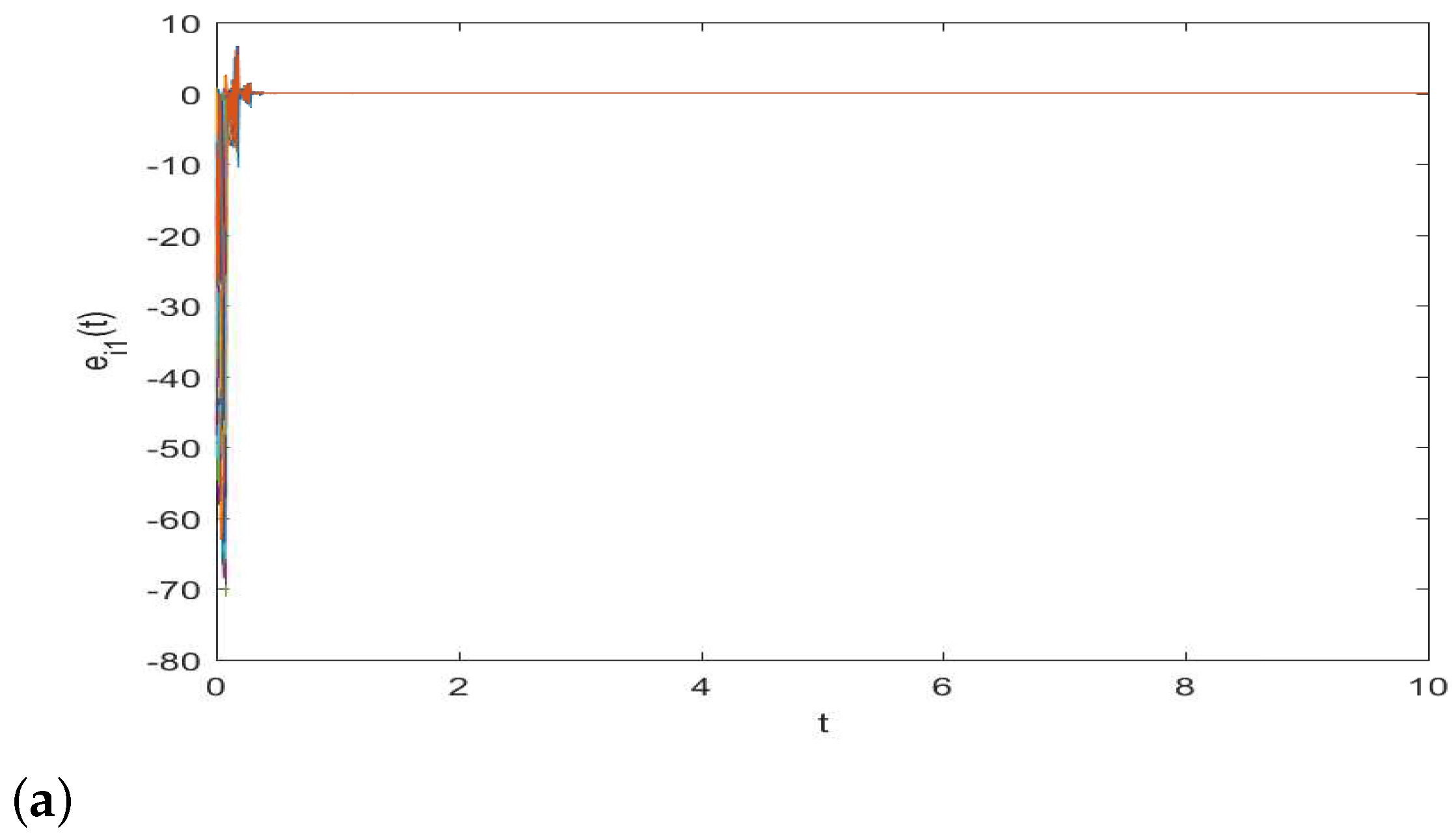
Utilizing the classical Runge-Kutta algorithm,
Figure 2 shows the time evolutions of
and
in controlled multi-link complex networks (
40) with random initial values.
Figure 3 reveals that synchronization error
approaches zero rapidly as the system evolves. It is clear that the synchronization objective of multi-link system (
40) can be achieved with a fast convergence under the hybrid impulsive pinning control technology, and the correctness of the theoretical analysis in this paper has been verified.


{kind=link}
{kind=link}
{kind=link}
{kind=link}



