

An improved Fractional MPPT Method by Using a Small Circle Approximation of the P–V Characteristic Curve
 , , , and
, , , and
Abstract
:1. Introduction
2. Proposed Method
2.1. The MPPT Problem Formulation
2.2. Proposed Analitycal Solution
- (a)
- and ,
- (b)
- ,
3. Experimental Results
- (a)
- Case 1: Offline test using I–V and P–V curves.
- (b)
- Case 2: Online test under a closed-loop control operation.
3.1. Case 1: Offline Test Using I-V and P-V Curves
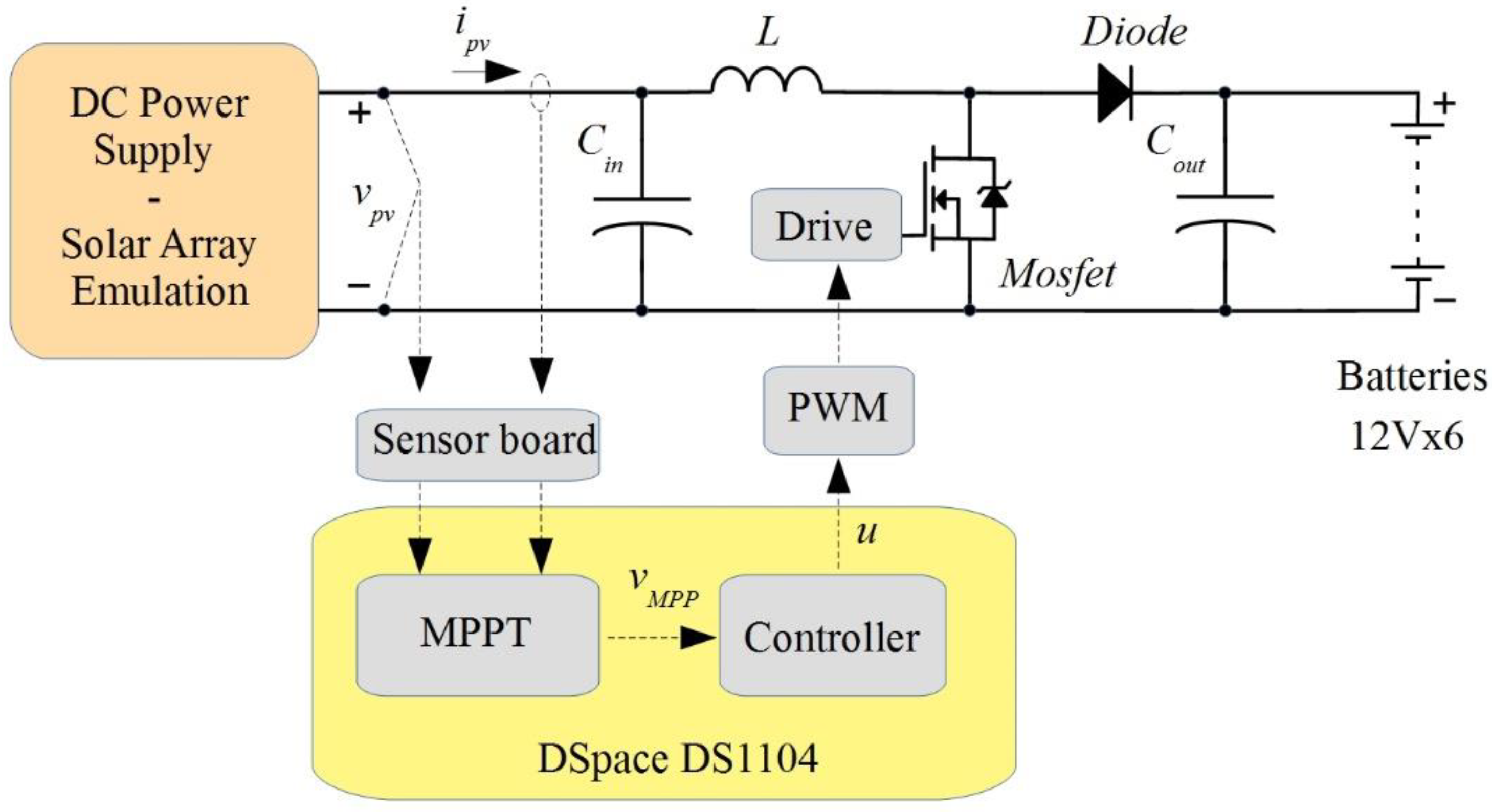
3.2. Case 2: Online Test Using Closed Loop Control
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solartec S72MC-175 | ||
|---|---|---|
| V | I | P |
| 0.53 | 5.3 | 2.809 |
| 15.90 | 5.29 | 84.26 |
| 18.55 | 5.29 | 98.30 |
| 21.20 | 5.29 | 112.30 |
| 23.85 | 5.29 | 126.21 |
| 26.50 | 5.27 | 139.87 |
| 28.00 | 5.26 | 147.32 |
| 30.21 | 5.22 | 157.75 |
| 32.33 | 5.14 | 166.18 |
| 34.45 | 5.01 | 172.77 |
| 35.51 | 4.91 | 174.52 |
| 36.04 | 4.85 | 174.91 |
| 36.57 | 4.78 | 174.90 |
| 37.10 | 4.70 | 174.44 |
| 39.22 | 4.24 | 166.37 |
| 40.80 | 3.68 | 150.27 |
| 41.87 | 3.14 | 131.61 |
| 42.93 | 2.37 | 102.15 |
| 43.99 | 1.13 | 50.00 |
| 44.40 | 0 | 0 |
Appendix B

References
- Bollipo, R.B.; Mikkili, S.; Bonthagorla, P.K. Hybrid, optimization, intelligent and classical PV MPPT techniques: Review. CSEE J. Power Energy Syst. 2020, 7, 9–33. [Google Scholar] [CrossRef]
- Hanzaei, S.H.; Gorji, S.A.; Ektesabi, M. A Scheme-Based Review of MPPT Techniques With Respect to Input Variables Including Solar Irradiance and PV Arrays’ Temperature. IEEE Access 2020, 8, 182229–182239. [Google Scholar] [CrossRef]
- Zhang, W.; Zhou, G.; Ni, H.; Sun, Y. A Modified Hybrid Maximum Power Point Tracking Method for Photovoltaic Arrays Under Partially Shading Condition. IEEE Access 2019, 7, 160091–160100. [Google Scholar] [CrossRef]
- El-Helw, H.M.; Magdy, A.; Marei, M.I. A Hybrid Maximum Power Point Tracking Technique for Partially Shaded Photovoltaic Arrays. IEEE Access 2017, 5, 11900–11908. [Google Scholar] [CrossRef]
- Troudi, F.; Jouini, H.; Mami, A.; Ben Khedher, N.; Aich, W.; Boudjemline, A.; Boujelbene, M. Comparative Assessment between Five Control Techniques to Optimize the Maximum Power Point Tracking Procedure for PV Systems. Mathematics 2022, 10, 1080. [Google Scholar] [CrossRef]
- Restrepo, C.; Yanẽz-Monsalvez, N.; González-Castaño, C.; Kouro, S.; Rodriguez, J. A Fast Converging Hybrid MPPT Algorithm Based on ABC and P&O Techniques for a Partially Shaded PV System. Mathematics 2021, 9, 2228. [Google Scholar] [CrossRef]
- Wang, S.-C.; Pai, H.-Y.; Chen, G.-J.; Liu, Y.-H. A Fast and Efficient Maximum Power Tracking Combining Simplified State Estimation With Adaptive Perturb and Observe. IEEE Access 2020, 8, 155319–155328. [Google Scholar] [CrossRef]
- Bi, Z.; Ma, J.; Man, K.L.; Smith, J.S.; Yue, Y.; Wen, H. An Enhanced 0.8 VOC-Model-Based Global Maximum Power Point Tracking Method for Photovoltaic Systems. IEEE Trans. Ind. Appl. 2020, 56, 6825–6834. [Google Scholar] [CrossRef]
- Alsumiri, M. Residual Incremental Conductance Based Nonparametric MPPT Control for Solar Photovoltaic Energy Conversion System. IEEE Access 2019, 7, 87901–87906. [Google Scholar] [CrossRef]
- Farah, L.; Hussain, A.; Kerrouche, A.; Ieracitano, C.; Ahmad, J.; Mahmud, M. A Highly-Efficient Fuzzy-Based Controller With High Reduction Inputs and Membership Functions for a Grid-Connected Photovoltaic System. IEEE Access 2020, 8, 163225–163237. [Google Scholar] [CrossRef]
- Obukhov, S.; Ibrahim, A.; Zaki Diab, A.A.; Al-Sumaiti, A.S.; Aboelsaud, R. Optimal Performance of Dynamic Particle Swarm Optimization Based Maximum Power Trackers for Stand-Alone PV System Under Partial Shading Conditions. IEEE Access 2020, 8, 20770–20785. [Google Scholar] [CrossRef]
- Baimel, D.; Tapuchi, S.; Levron, Y.; Belikov, J. Improved Fractional Open Circuit Voltage MPPT Methods for PV Systems. Electronics 2019, 8, 321. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.; Almutairi, K.; Padmanaban, S.; Tirth, V.; Algarni, S.; Irshad, K.; Islam, S.; Zahir, M.H.; Shafiullah, M.; Malik, M.Z. Investigation of MPPT Techniques Under Uniform and Non-Uniform Solar Irradiation Condition–A Retrospection. IEEE Access 2020, 8, 127368–127392. [Google Scholar] [CrossRef]
- Pindado, S.; Cubas, J.; Roibás-Millán, E.; Bugallo-Siegel, F.; Sorribes-Palmer, F. Assessment of Explicit Models for Different Photovoltaic Technologies. Energies 2018, 11, 1353. [Google Scholar] [CrossRef] [Green Version]
- Ostadrahimi, A.; Mahmoud, Y. Novel Spline-MPPT Technique for Photovoltaic Systems Under Uniform Irradiance and Partial Shading Conditions. IEEE Trans. Sustain. Energy 2021, 12, 524–532. [Google Scholar] [CrossRef]
- González-Castaño, C.; Restrepo, C.; Revelo-Fuelagán, J.; Lorente-Leyva, L.L.; Peluffo-Ordóñez, D.H. A Fast-Tracking Hybrid MPPT Based on Surface-Based Polynomial Fitting and P&O Methods for Solar PV under Partial Shaded Conditions. Mathematics 2021, 9, 2732. [Google Scholar] [CrossRef]
- Álvarez, J.M.; Alfonso-Corcuera, D.; Roibás-Millán, E.; Cubas, J.; Cubero-Estalrrich, J.; Gonzalez-Estrada, A.; Jado-Puente, R.; Sanabria-Pinzón, M.; Pindado, S. Analytical Modeling of Current-Voltage Photovoltaic Performance: An Easy Approach to Solar Panel Behavior. Appl. Sci. 2021, 11, 4250. [Google Scholar] [CrossRef]
- Pindado, S.; Cubas, J. Simple mathematical approach to solar cell/panel behavior based on datasheet information. Renew. Energy 2017, 103, 729–738. [Google Scholar] [CrossRef] [Green Version]
- Andrean, V.; Chang, P.; Lian, K. A Review and New Problems Discovery of Four Simple Decentralized Maximum Power Point Tracking Algorithms—Perturb and Observe, Incremental Conductance, Golden Section Search, and Newton’s Quadratic Interpolation. Energies 2018, 11, 2966. [Google Scholar] [CrossRef] [Green Version]
- Espinoza, D.; Barcenas, E.; Campos-Delgado, D.; De Angelo, C. Voltage-Oriented Input-Output Linearization Controller as Maximum Power Point Tracking Technique for Photovoltaic Systems. IEEE Trans. Ind. Electron. 2014, 62, 3499–3507. [Google Scholar] [CrossRef]












| Parameter | Value | Equation |
|---|---|---|
| - | ||
| - | ||
| - | ||
| (36.04, 174.71) | (4) | |
| (36.835, 174.67) | (5) | |
| −2.7894 | (6) | |
| 1.11521 | (7) | |
| 36.28 V | (10) |
| Proposed Method Error (%) | Fractional Method Error (%) | |||
|---|---|---|---|---|
| 36.30 V | 36.28 V | Between 31.08 V to 39.96 V | 0.05% | 14.3% (worst case) |
| Parameter | Value |
|---|---|
| Mosfet | IRFP250N |
| Diode | STTH30R04W |
| L | 1.5 mH |
| Cin | 30 μ F |
| Cout | 680 μ F |
| PV Module | |||
|---|---|---|---|
| Solar Array Emulator | (27.0 V, 73.72 W) | (28.0 V, 75.30 W) | (31.0 V, 75.55 W) |
| Calculated | 29.69 V | ||
| Exact | 29.73 V | ||
| Error % | 0.13% | ||
| PV Module | |||
|---|---|---|---|
| Solar Array Emulator | (28.00, 146.70) | (31.00, 147.70) | (32.00, 143.50) |
| Calculated | 30.14 V | ||
| Exact | 30.00 V | ||
| Error % | 0.46% | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bárcenas-Bárcenas, E.; Espinoza-Trejo, D.R.; Pecina-Sánchez, J.A.; Álvarez-Macías, H.A.; Compeán-Martínez, I.; Vértiz-Hernández, Á.A. An improved Fractional MPPT Method by Using a Small Circle Approximation of the P–V Characteristic Curve. Mathematics 2023, 11, 526. https://doi.org/10.3390/math11030526
Bárcenas-Bárcenas E, Espinoza-Trejo DR, Pecina-Sánchez JA, Álvarez-Macías HA, Compeán-Martínez I, Vértiz-Hernández ÁA. An improved Fractional MPPT Method by Using a Small Circle Approximation of the P–V Characteristic Curve. Mathematics. 2023; 11(3):526. https://doi.org/10.3390/math11030526
Chicago/Turabian StyleBárcenas-Bárcenas, Ernesto, Diego R. Espinoza-Trejo, José A. Pecina-Sánchez, Héctor A. Álvarez-Macías, Isaac Compeán-Martínez, and Ángel A. Vértiz-Hernández. 2023. "An improved Fractional MPPT Method by Using a Small Circle Approximation of the P–V Characteristic Curve" Mathematics 11, no. 3: 526. https://doi.org/10.3390/math11030526