
On the Dynamics of the Complex Hirota-Dynamical Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Modified Simple Equation Approach
2.2. The Generalized Kudryashov Approach
2.3. The Modified Kudryashov Approach
3. Implementations
3.1. The Formulation of the Solutions to the Complex HDM
3.2. Implementation of MSE Approach
3.3. Implementation of the GKA
3.4. Implementation of the MKA
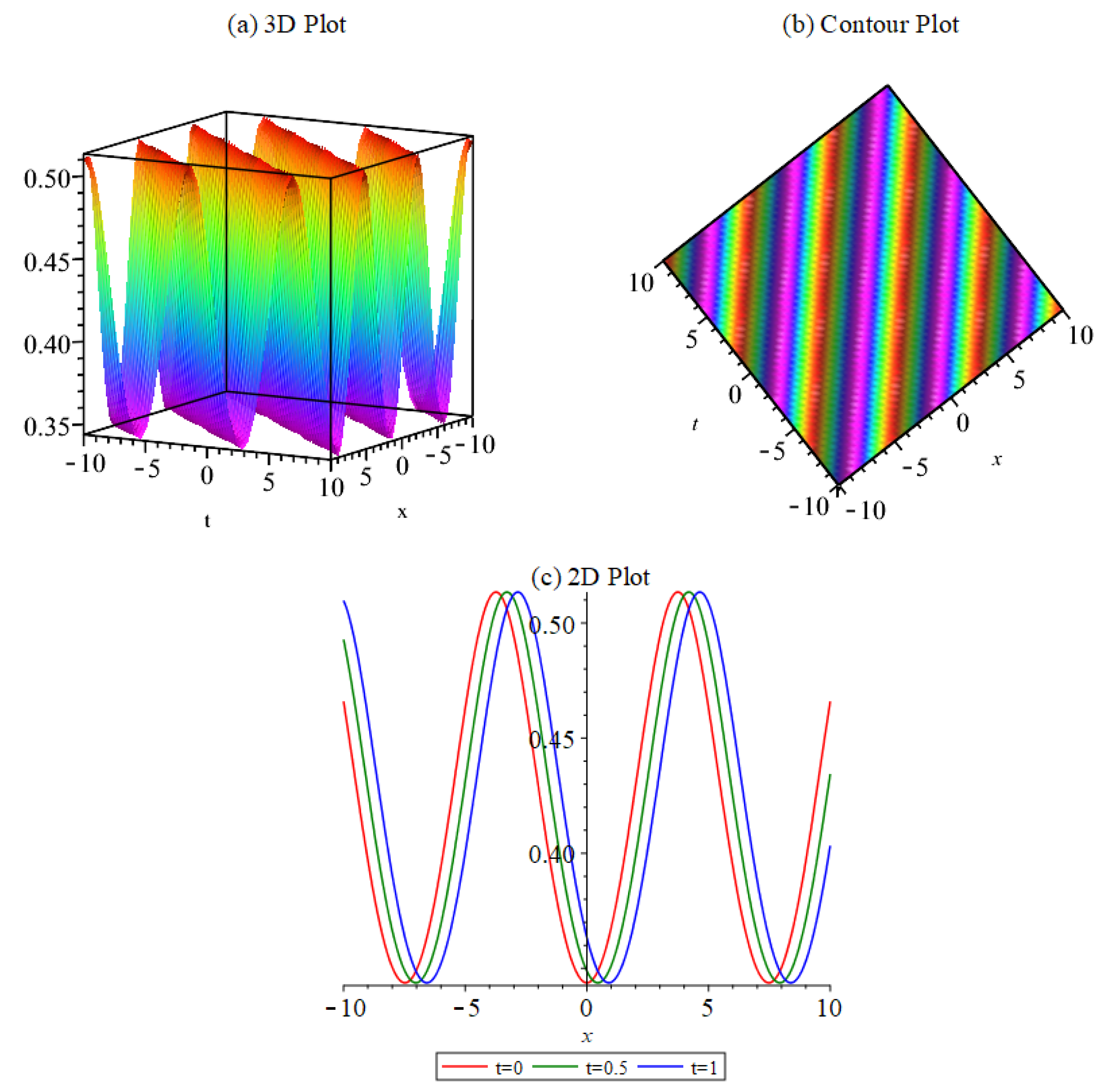
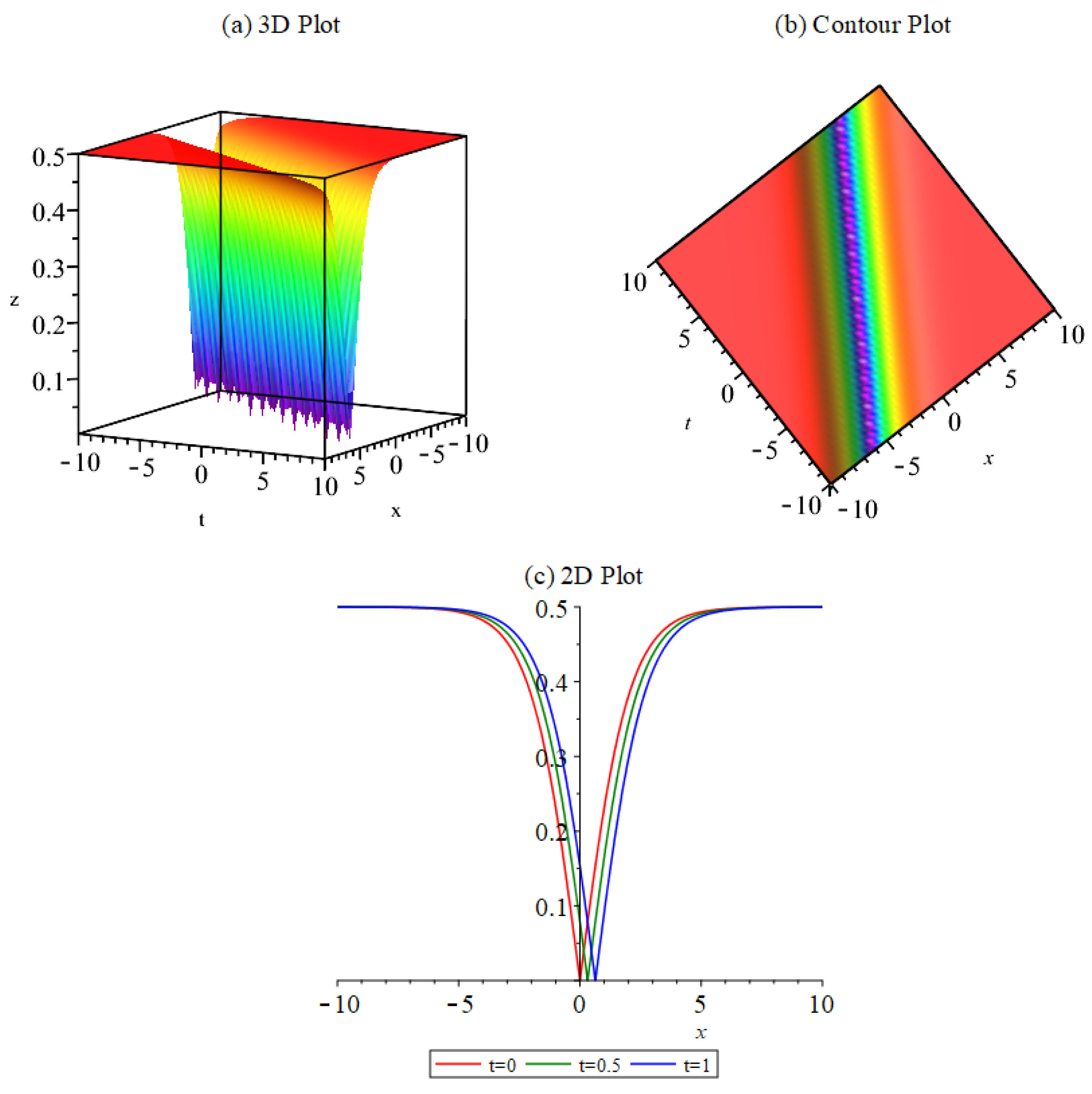
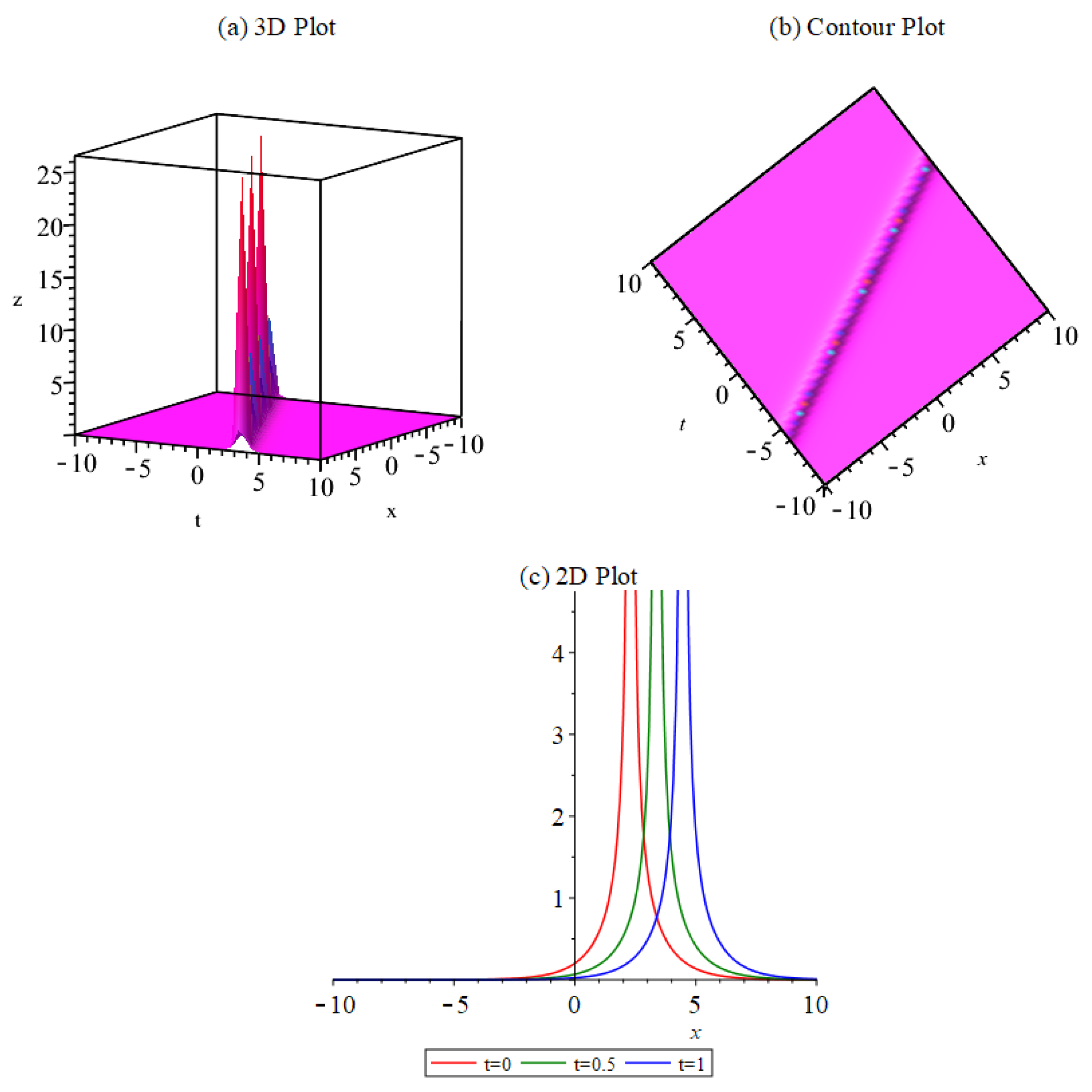
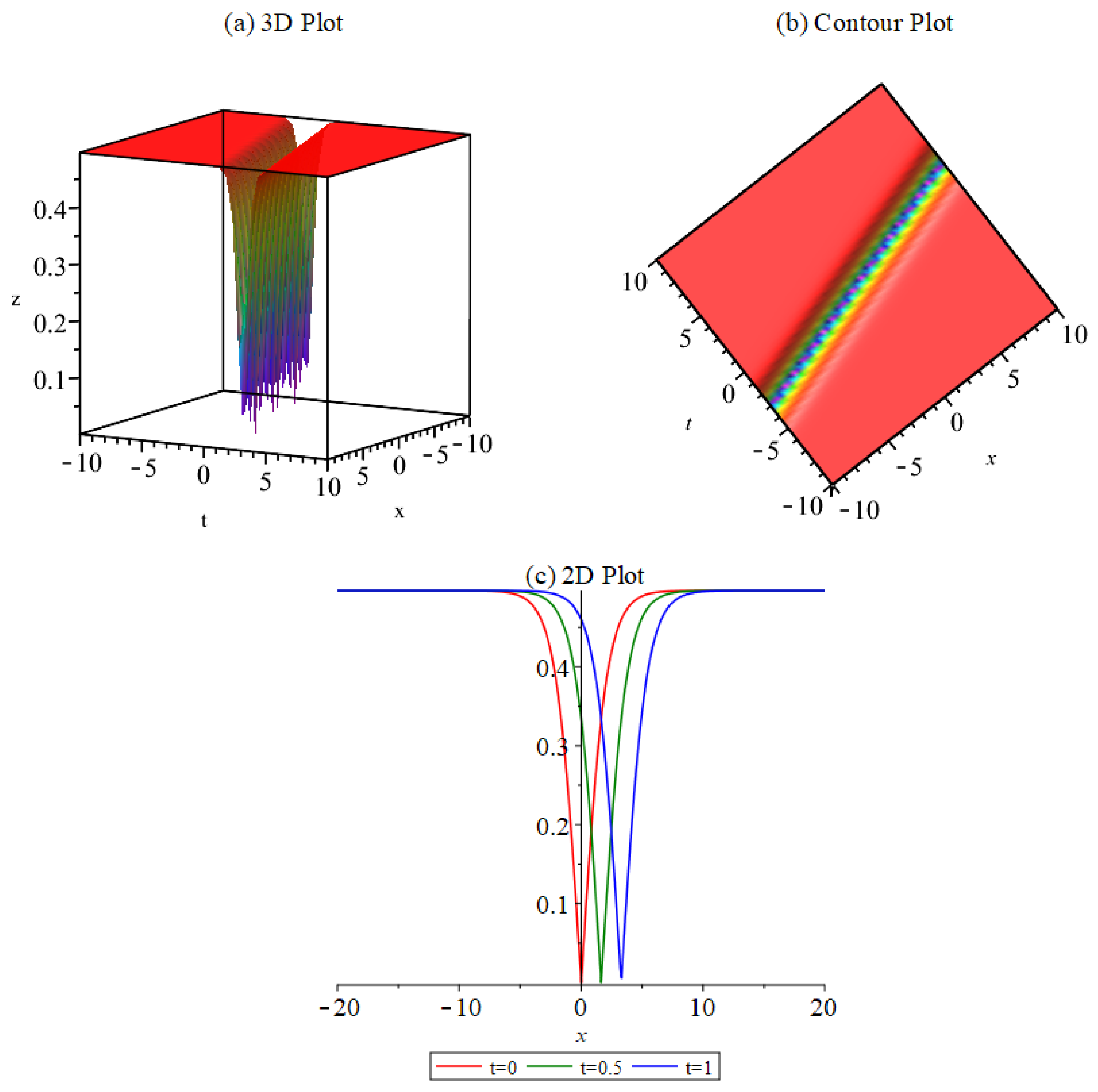
4. The Graphical Representations
5. Modulation Instability (MI) Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ghanim, F.; Batiha, B.; Ali, A.H.; Darus, M. Geometric Properties of a Linear Complex Operator on a Subclass of Meromorphic Functions: An Analysis of Hurwitz-Lerch-Zeta Functions. Appl. Math. Nonlinear Sci. 2023. [Google Scholar] [CrossRef]
- Nuaimi, M.A.; Jawad, S. Modelling and stability analysis of the competitional ecological model with harvesting. Commun. Math. Biol. Neurosci. 2022, 2022, 47. [Google Scholar]
- Yang, X.; Wu, L.; Zhang, H. A space-time spectral order sinc-collocation method for the fourth-order nonlocal heat model arising in viscoelasticity. Appl. Math. Comput. 2023, 457, 128192. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, H.; Jiang, X.; Yang, X. A high-order and efficient numerical technique for the nonlocal neutron diffusion equation representing neutron transport in a nuclear reactor. Ann. Nucl. 2024, 195, 110163. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, H.; Yang, X. H1-norm error analysis of a robust ADI method on graded mesh for three-dimensional subdiffusion problems. Numer. Algor. 2023, 1–19. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, X.; Tang, Q.; Xu, D. A robust error analysis of the OSC method for a multi-term fourth-order sub-diffusion equation. Comput. Math. Appl. 2022, 109, 180–190. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Baleanu, D.; Machado, J.A.T.; Osman, M.S.; Rezazadeh, H.; Arshed, S.; Gunerhan, H. Traveling wave solutions to nonlinear directional couplers by modified Kudryashov method. Phys. Scr. 2020, 95, 075217. [Google Scholar] [CrossRef]
- Rizvi, S.T.R.; Khan, S.U.D.; Hassan, M.; Fatima, I.; Khan, S.U.D. Stable propagation of optical solitons for nonlinear Schrdinger equation with dispersion and self phase modulation. Math. Comput. Simul. 2021, 179, 126–136. [Google Scholar] [CrossRef]
- Seadawy, A.; Alamri, S.Z. Mathematical methods via the nonlinear two-dimensional water waves of Olver dynamical equation and its exact solitary wave solutions. Results Phys. 2018, 8, 286–291. [Google Scholar] [CrossRef]
- Zhang, Z. Jacobi elliptic function expansion method for the mKdVZK and the Hirota equations. Rom. J. Phys. 2015, 60, 1384–1394. [Google Scholar]
- Raza, N.; Kazmi, S.S. Qualitative analysis and stationary optical patterns of nonlinear Schrödinger equation including nonlinear chromatic dispersion. Opt. Quantum Electron. 2023, 55, 718. [Google Scholar] [CrossRef]
- Hashemi, M.S.; Mirzazadeh, M. Optical solitons of the perturbed nonlinear Schrdinger equation using Lie symmetry method. Optik 2023, 281, 170816. [Google Scholar] [CrossRef]
- Gao, W.; Ismael, H.F.; Husien, A.M.; Bulut, H.; Baskonus, H.M. Optical soliton solutions of the cubic-quartic nonlinear Schrödinger and resonant nonlinear Schrödinger equation with the parabolic law. Appl. Sci. 2019, 10, 219. [Google Scholar] [CrossRef]
- Akbulut, A.; Kaplan, M.; Tascan, F. Conservation laws and exact solutions of Phi-Four (Phi-4) equation via the (G’/G, 1/G)-expansion method. Z. für Naturforschung A 2016, 71, 439–446. [Google Scholar] [CrossRef]
- Kaplan, M.; Ozer, M.N. Multiple-soliton solutions and analytical solutions to a nonlinear evolution equation. Opt. Quantum Electron. 2018, 50, 2. [Google Scholar] [CrossRef]
- Zhou, Q.; Kumar, D.; Mirzazadeh, M.; Eslami, M.; Rezazadeh, H. Optical soliton in nonlocal nonlinear medium with cubic-quintic nonlinearities and spatio-temporal dispersion. Acta Phys. Pol. A 2018, 134, 1204–1210. [Google Scholar] [CrossRef]
- Ma, W.X.; Lee, J.H. A transformed rational function method and exact solutions to the dimensional Jimbo-Miwa equation. Chaos Solitons Fractals 2009, 42, 1356–1363. [Google Scholar] [CrossRef]
- Hereman, W.; Zhuang, W. Symbolic Computation of Solitons via Hirota’s Bilinear Method; Department of Mathematical and Computer Sciences, Colorado School of Mines: Golden, CO, USA, 1994. [Google Scholar]
- Alotaibi, M.F.; Raza, N.; Rafiq, M.H.; Soltani, A. New solitary waves, bifurcation and chaotic patterns of Fokas system arising in monomode fiber communication system. Alex. Eng. J. 2023, 67, 583–595. [Google Scholar] [CrossRef]
- Raza, N.; Seadawy, A.R.; Kaplan, M.; Butt, A.R. Symbolic computation and sensitivity analysis of nonlinear Kudryashov’s dynamical equation with applications. Phys. Scr. 2021, 96, 105216. [Google Scholar] [CrossRef]
- Raza, N.; Rani, B.; Chahlaoui, Y.; Shah, N.A. A variety of new rogue wave patterns for three couplednonlinear Maccari’s models in complex form. Nonlinear Dyn. 2023, 111, 18419–18437. [Google Scholar] [CrossRef]
- Zayed, E.M.E.; Ibrahim, S.H. Exact solutions of nonlinear evolution equations in mathematical physics using the modified simple equation method. Chin. Phys. Lett. 2012, 29, 060201. [Google Scholar] [CrossRef]
- Xia, F.L.; Jarad, F.; Hashemi, M.S.; Riaz, M.B. A reduction technique to solve the generalized nonlinear dispersive mK(m,n) equation with new local derivative. Results Phys. 2022, 38, 105512. [Google Scholar] [CrossRef]
- Hashemi, M.S.; Malekinagad, J.; Marasi, H.R. Series solution of the system of fuzzy differential equations. Adv. Fuzzy Syst. 2012, 2012, 407647. [Google Scholar] [CrossRef]
- Sugati, T.G.; Seadawy, A.R.; Alharbey, R.; Albarakati, W. Nonlinear physical complex hirota dynamical system: Construction of chirp free optical dromions and numerical wave solutions. Chaos Solitons Fractals 2022, 156, 111788. [Google Scholar] [CrossRef]
- Ali, K.K.; Tarla, S.; Ali, M.R.; Yusuf, A.; Yilmazer, R. Consistent solitons in the plasma and optical fiber for complex hirota-dynamical model. Results Phys. 2023, 47, 106393. [Google Scholar] [CrossRef]
- Seadawy, A.R.; Abdullah, A. Nonlinear complex physical models: Optical soliton solutions of the complex hirota dynamical model. Indian J. Phys. 2021, 95, 489–498. [Google Scholar] [CrossRef]
- Bekir, A.; Zahran, E. New description for the bright, dark periodic solutions to the complex hirota-dynamical model. Authorea Prepr. 2020. [Google Scholar]
- Kudryashov, N.A. Solitary and periodic waves of the hierarchy for propagation pulse in optical fiber. Optik 2019, 194, 163060. [Google Scholar] [CrossRef]
- Kudryashov, N.A. One method for finding exact solutions of nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 2248–2253. [Google Scholar] [CrossRef]
- Hosseini, K.; Ansari, R. New exact solutions of nonlinear conformable time-fractional Boussinesq equations using the modified Kudryashov method. Waves Random Complex Media 2017, 27, 628–636. [Google Scholar] [CrossRef]
- Akbulut, A.; Arnous, A.H.; Hashemi, M.S.; Mirzazadeh, M. Solitary waves for the generalized nonlinear wave equation in (3+1) dimensions with gas bubbles using the Nnucci’s reduction, enhanced and modified Kudryashov algorithms. J. Ocean. Eng. Sci. 2022. [Google Scholar] [CrossRef]
- Karakoc, S.B.G.; Ali, K.K. Theoretical and computational structures on solitary wave solutions of Benjamin Bona Mahony-Burgers equation. Tbil. Math. J. 2021, 14, 33–50. [Google Scholar] [CrossRef]
- Ay, N.G.; Yasar, E. Multi wave, kink, breather, interaction solutions and modulation instability to a conformable third order nonlinear Schrödinger equation. Opt. Quantum Electron. 2023, 55, 360. [Google Scholar]
- Tariq, K.U.; Inc, M.; Kazmi, S.M.R.; Alhefth, R.K. Modulation instability, stability analysis and soliton solutions to the resonance nonlinear Schrödinger model with Kerr law nonlinearity. Opt. Quantum Electron. 2023, 55, 838. [Google Scholar] [CrossRef]
- Xiang, Y.; Wen, S.; Dai, X.; Tang, Z.; Su, W.; Fan, D. Modulation instability induced by nonlinear dispersion in nonlinear metamaterials. Opt. Soc. Am. 2007, 24, 3058–3063. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akbulut, A.; Kaplan, M.; Alqahtani, R.T.; Ahmed, W.E. On the Dynamics of the Complex Hirota-Dynamical Model. Mathematics 2023, 11, 4851. https://doi.org/10.3390/math11234851
Akbulut A, Kaplan M, Alqahtani RT, Ahmed WE. On the Dynamics of the Complex Hirota-Dynamical Model. Mathematics. 2023; 11(23):4851. https://doi.org/10.3390/math11234851
Chicago/Turabian StyleAkbulut, Arzu, Melike Kaplan, Rubayyi T. Alqahtani, and W. Eltayeb Ahmed. 2023. "On the Dynamics of the Complex Hirota-Dynamical Model" Mathematics 11, no. 23: 4851. https://doi.org/10.3390/math11234851