3.2. Process of the Joint Optimization Algorithm
This section first provides specific details regarding the control thresholds for various parameters and the error evaluation method for the joint optimization process. The accuracy threshold for the surrogate model is represented by
, the maximum number of sampling times is
N, and the inter-sample distance is controlled by
. The evaluation of errors is computed using the root-mean-square-error (RMSE) method expressed as:
The following section outlines the specific steps involved in the joint optimization algorithm based on the G-RBF surrogate model with an optimal shape parameter.
Step 1: The entire system is sampled using Latin hypercube, followed by the selection of the optimal shape parameters based on the sampling points using the method described in
Section 2.3.1.
Step 2: The surrogate model undergoes precision verification, where the existence of
warrants the further addition of points. According to the description in
Section 2.4, validation procedures are necessary for each addition. Newly added point
must satisfy the condition
relative to the preexisting point
. Thus, the addition of each point is either valid or invalid, and the invalid point must be re-added until
is achieved or the maximum number of sampling times reaches
N.
Step 3: The G-RBF surrogate model obtained can be optimized using global optimization techniques to determine the optimal solution. The use of a sampling strategy that ensures that points are well spaced allows the surrogate model to represent global information. Therefore, the optimal solution obtained through global optimization techniques is likely to be very close to the optimal solution of the original problem.
Step 4: The global optimization solution serves as an initial value submitted to the local optimization method to further optimize the high-precision G-RBF surrogate model, resulting in the optimal solution of the joint optimization algorithm.
The joint optimization algorithm is presented in the form of a flowchart in
Figure 4.
3.3. Testing the Joint Optimization Algorithm
In this section, we test the effectiveness of the G-RBF surrogate-based joint optimization algorithm using two two-dimensional test functions. In practical applications, it is important to avoid excessive calls to high-precision models. Therefore, when comparing the global optimization algorithm, local optimization algorithm, and joint optimization algorithm, the maximum absolute error (MaxError) was chosen as the measure of error for the design variables. The MaxError in function values (), the MaxError in variable values (), and the number of G-RBF surrogate model calls (T) are compared.
The Ackley Function [
31] is a multimodal function with multiple local minima and a very complex landscape. It is defined as follows:
Here,
x and
y are the independent variables that lie in the range
.
The optimal solution and value refer to the minimum point and value, respectively, of the function. The optimal solution for the Ackley Function is , where the function reaches its minimum value of . Optimization algorithms can be employed to find the optimal solution. This study employed a genetic algorithm as the global optimization algorithm and a gradient descent method as the local optimization algorithm.
A genetic algorithm (GA) is a population-based optimization algorithm that mimics the process of natural selection to search for the optimal solution. The algorithm maintains a population of candidate solutions, represented by a set of chromosomes, and iteratively applies genetic operators, such as selection, crossover, and mutation, to generate new offspring. The fitness of each individual is evaluated based on the objective function, and the population evolves toward better solutions over time. The GA terminates when a stopping criterion, such as a maximum number of generations, is met or when the optimal solution is found.
The gradient descent method is an iterative optimization algorithm that seeks to minimize a function by iteratively adjusting the parameters in the direction of the negative gradient of the function. At each iteration, the algorithm computes the gradient of the function with respect to the current parameter values and updates the parameters in the direction of the negative gradient. The step size of the update is controlled by a learning rate parameter, which determines the size of the step taken in each iteration. The algorithm terminates when a stopping criterion, such as a desired level of convergence or a maximum number of iterations, is met.
In this study, the GA was employed as the global optimization algorithm to search for the optimal set of design variables, whereas the gradient descent method was used as the local optimization algorithm to refine the solution obtained using the GA. Specifically, the GA was used to generate a set of candidate solutions, and the best solution was selected as the initial point for the gradient descent method. The gradient descent method was then employed to fine-tune the solution by iteratively adjusting the design variables in the direction of the negative gradient of the objective function. The process was repeated until convergence was achieved or a maximum number of iterations was reached.
In summary, the combination of the genetic algorithm and gradient descent method allowed for efficient global and local optimization, respectively, and enabled the algorithm to search for the optimal solution in a large search space. A population size of 30 and 100 generations was used. The initial values for the gradient descent method were set to [−5, 0].
The best shape parameter
for the G-RBF interpolation of (
16) was determined using the method described in
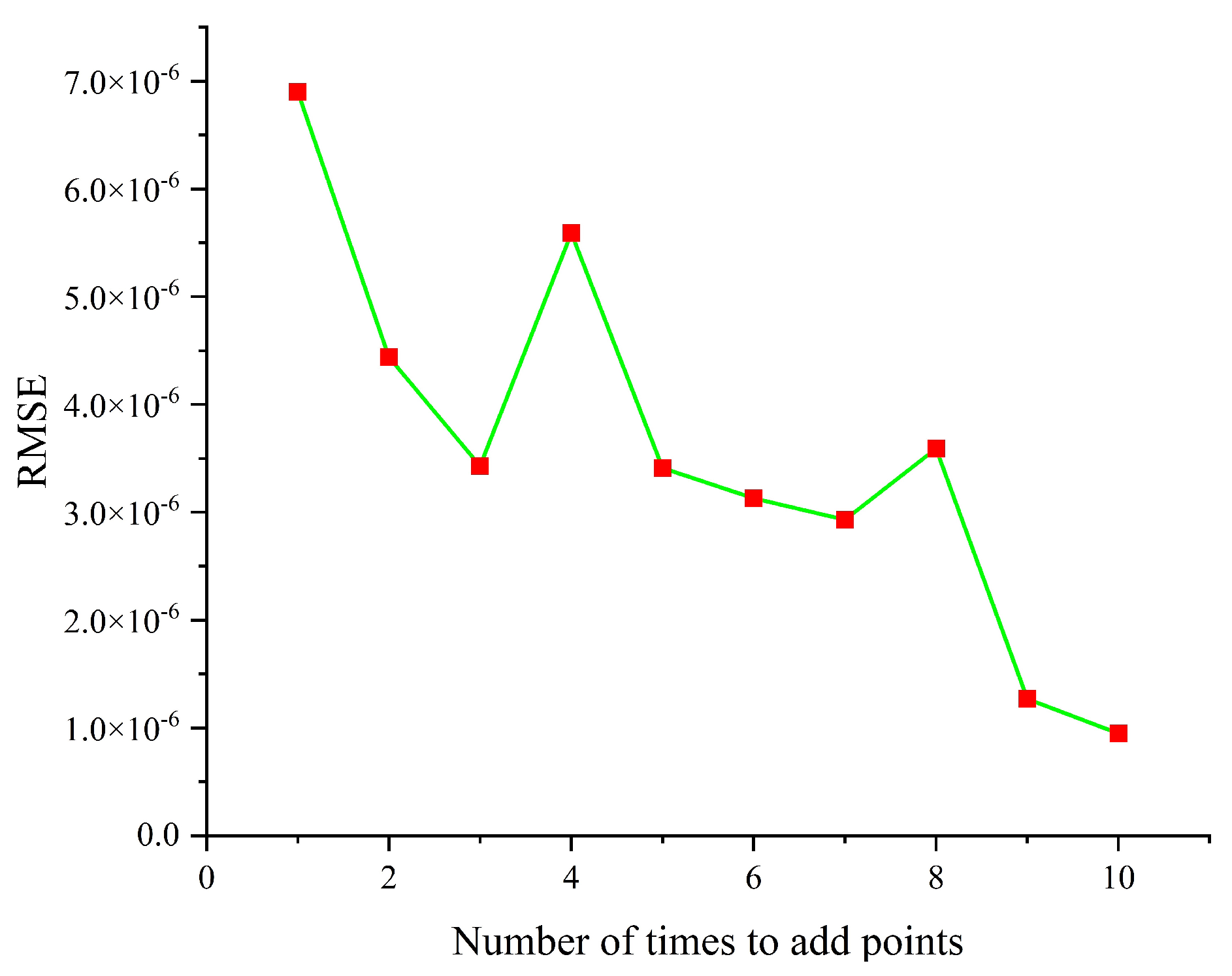
Section 2.3.1. The RMSE threshold for the surrogate model was set to
, and
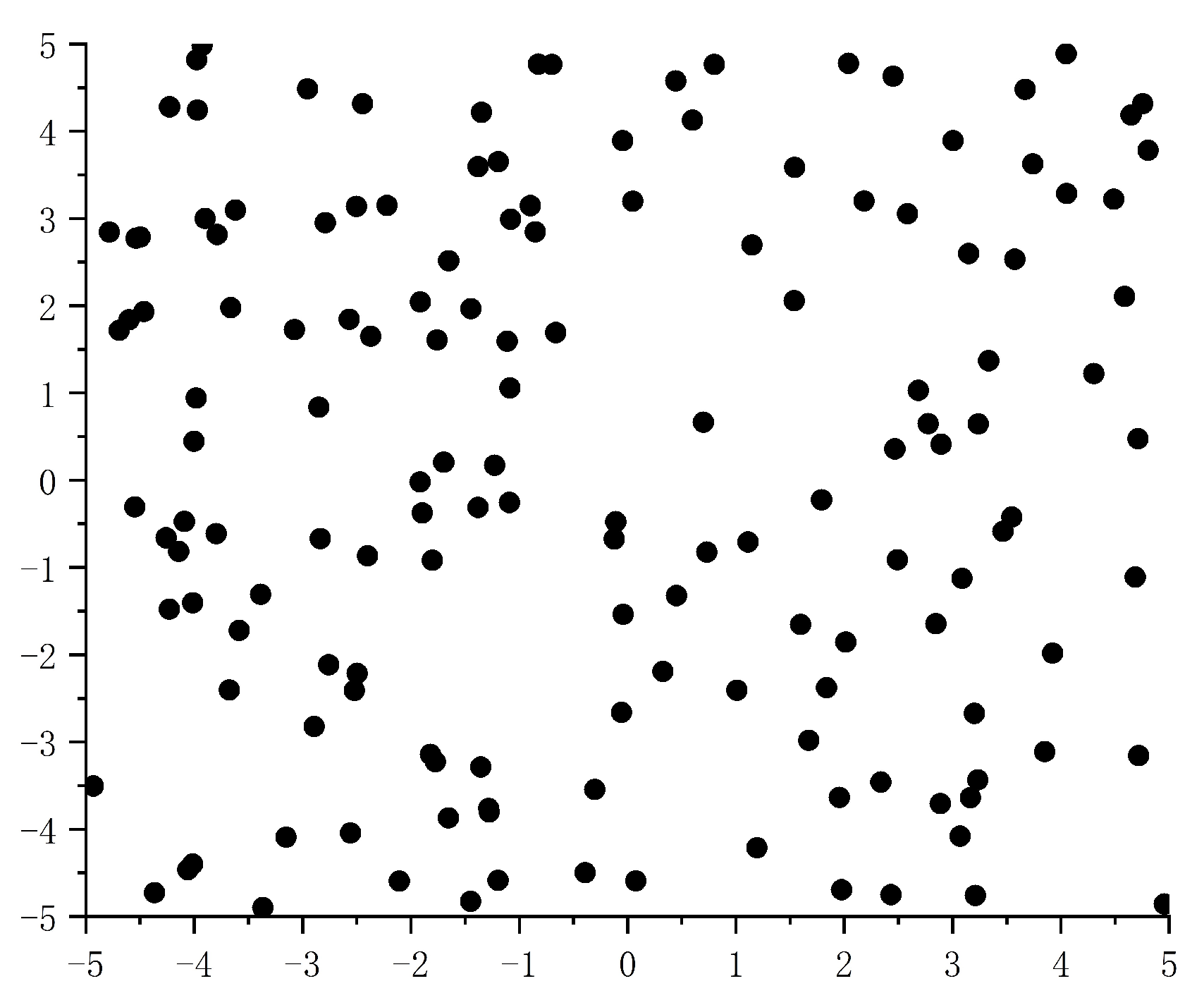
Figure 5 and
Figure 6 show the RMSE of the G-RBF surrogate model and the distribution of sampled points.
The distribution of the sampling points, including the added points, appeared to be fairly uniform across the global range. This suggests that the controlled refinement strategy in
Section 2.4 was effective in ensuring that the surrogate model adequately captured the global characteristics. This ensures that our joint optimization algorithm can find the global optimal solution.
The convergence of the genetic algorithm optimization of the original objective function and our proposed joint optimization algorithm are compared in
Figure 7 and
Figure 8.
Table 4 compares the optimization error and the number of function evaluations for the objective function (
16).
As the gradient descent method exhibited significantly larger errors compared to the other two algorithms, we do not discuss it in detail here. In contrast, both the genetic algorithm and joint optimization methods converged to the exact solution, as demonstrated in
Figure 7 and
Figure 8 and
Table 4. However, there were differences in their convergence behaviors. The joint optimization method converged more swiftly to the vicinity of the exact solution during the iteration thanks to decent initial values. In contrast, the genetic algorithm required considerably more operations of the high-fidelity G-RBF surrogate model before converging to the solution. These results highlight the effectiveness of the joint optimization method in reducing computation costs and accelerating convergence while ensuring solution accuracy.
Rosenbrock’s Banana Function [
32] is a well-known constrained optimization problem, which is frequently utilized for evaluating optimization algorithms’ performance. The function can be formulated as minimizing the Equation:
where
x and
y are bounded by the range
. The optimal solution to this problem is achieved when
and
, at which point the objective function attains the minimum value of
. We employed the ant colony algorithm as our global optimization method and the simplex method as the local optimization in our study.
The ant colony algorithm (ACA) is a metaheuristic optimization algorithm inspired by the behavior of ants in finding the shortest path between their colony and food sources. The algorithm maintains a set of artificial ants, each representing a potential solution to the optimization problem. The ants construct a pheromone trail based on the quality of the solutions they encounter, and the pheromone trail guides subsequent ants toward better solutions. The algorithm terminates when a stopping criterion, such as a maximum number of iterations or a desired level of convergence, is met. The best solution found by the algorithm is the one with the highest pheromone trail.
The simplex method is an iterative optimization algorithm that seeks to minimize a linear objective function subject to linear constraints. The algorithm starts with a feasible solution and iteratively moves toward the optimal solution by adjusting the variables within the constraints. At each iteration, the algorithm identifies a non-basic variable that can improve the objective function value and moves along the direction of the corresponding constraint boundary until a new basic feasible solution is found. The algorithm terminates when a stopping criterion, such as a desired level of convergence or a maximum number of iterations, is met.
In this study, we employed the ACA as the global optimization algorithm and the simplex method as the local optimization method. Specifically, the ACA was used to explore the search space and identify promising regions for the optimization problem. The best solution found by the ACA was then used as the initial point for the simplex method, which iteratively improved the solution by adjusting the design variables within the constraints. The process was repeated until convergence was achieved or a maximum number of iterations was reached.
In summary, the combination of the ant colony algorithm and simplex method allowed for efficient global and local optimization, respectively, and enabled the algorithm to search for the optimal solution in a large search space subject to linear constraints.
The optimal parameter is
, with an RMSE threshold of
.
Figure 9 and
Figure 10 illustrate the convergence process of the ant colony and joint optimization algorithms.
Table 5 compares the results obtained using the three optimization algorithms.
The solution obtained using the simplex method was far from optimal so we do not discuss this in detail here.
Table 5 and
Figure 9 and
Figure 10 show that both the ant colony and joint optimization algorithms converged to the optimal solution. It should be noted that the joint optimization algorithm needs to run the Gaussian radial basis function surrogate model only one-fifth of the times required by the ant colony algorithm. This further supports the effectiveness of the algorithm proposed in this study.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}