
Tracking Control for Triple-Integrator and Quintuple-Integrator Systems with Single Input Using Zhang Neural Network with Time Delay Caused by Backward Finite-Divided Difference Formulas for Multiple-Order Derivatives


Abstract
:1. Introduction
- To study the impact of the time delay caused by the multiple-order derivative approximation on the order-N ZNN method. To investigate this, the order-N ZNN model is transformed into a non-homogeneous time delay differential equation by using BFDDFs with quadratic-order precision.
- Five theorems, together with rigorous mathematical proofs, are illustrated to describe the convergence properties of the order-N ZNN method without time delay and the quadratic-order error pattern of the order-N ZNN method with time delay derived from the backward finite-divided difference formulas with quadratic-order precision, which specifically demonstrate the effect of the time delay.
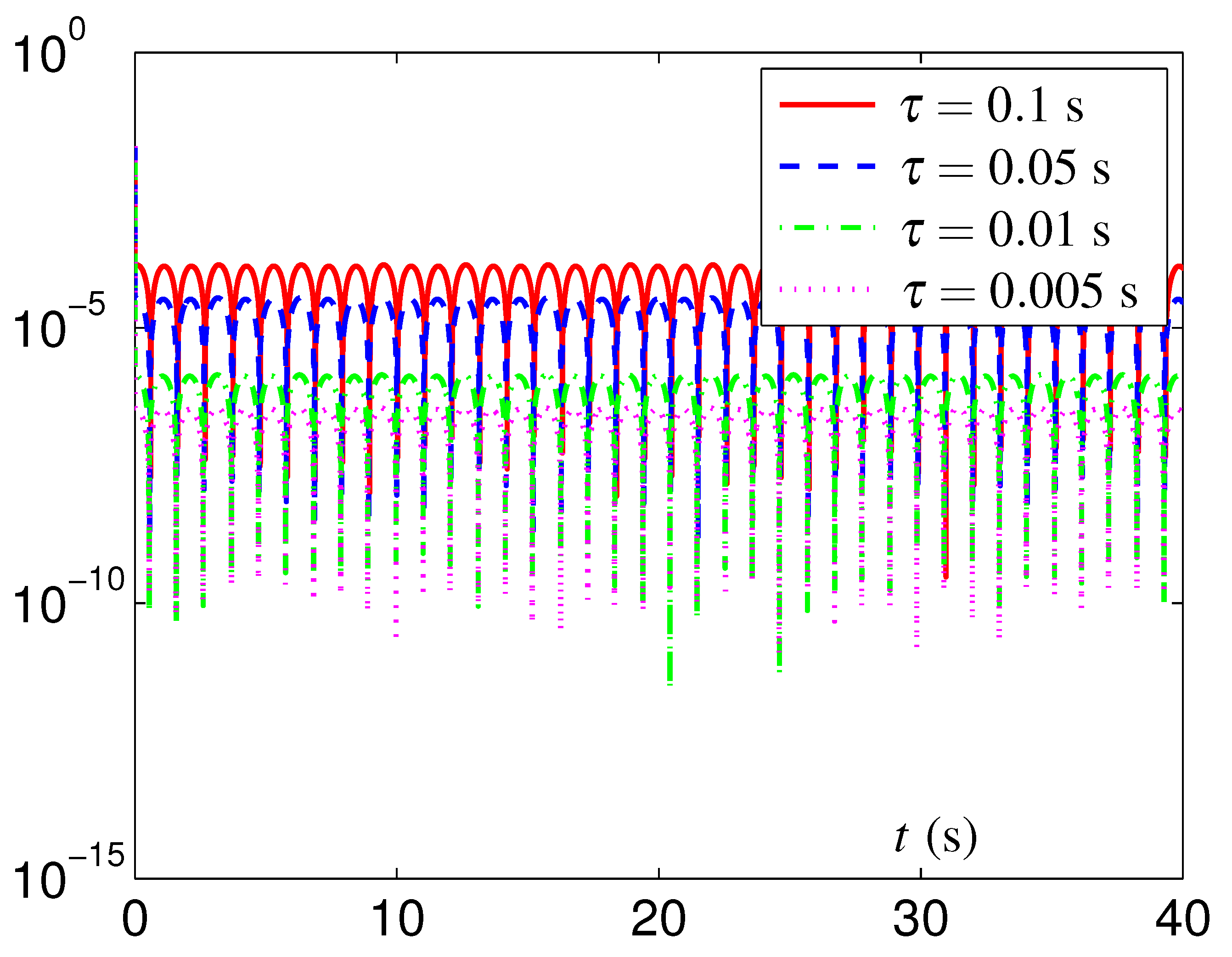
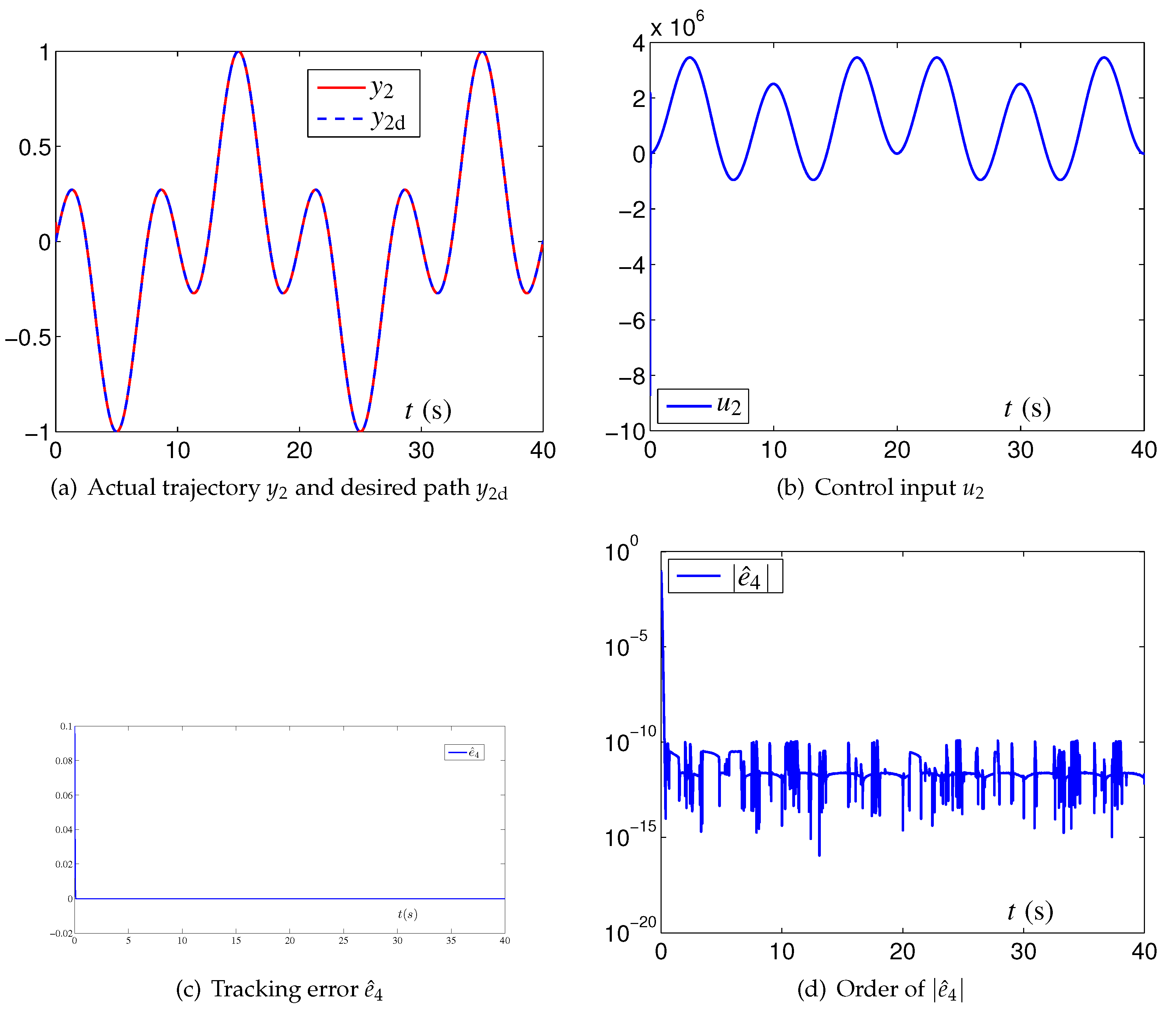
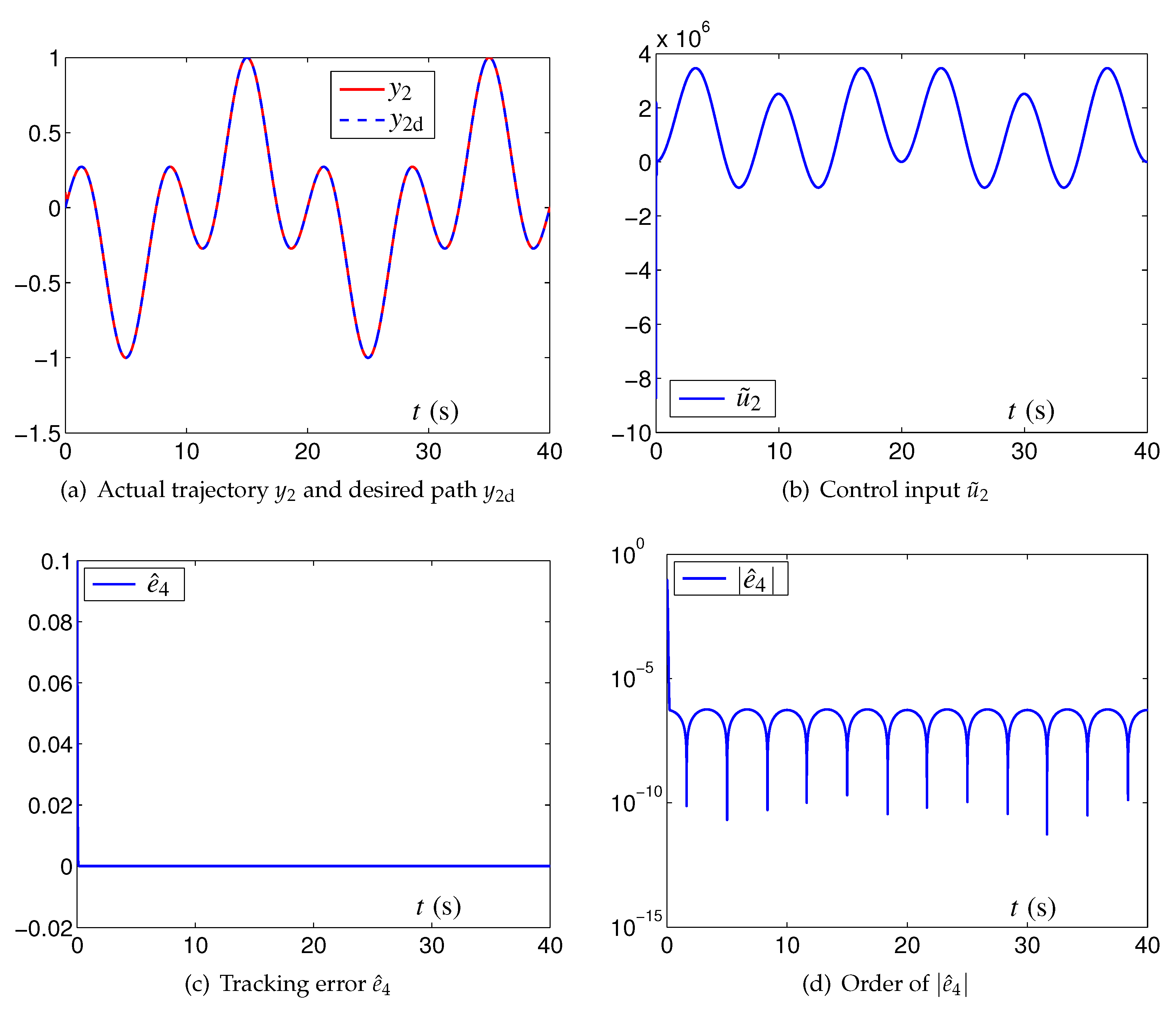
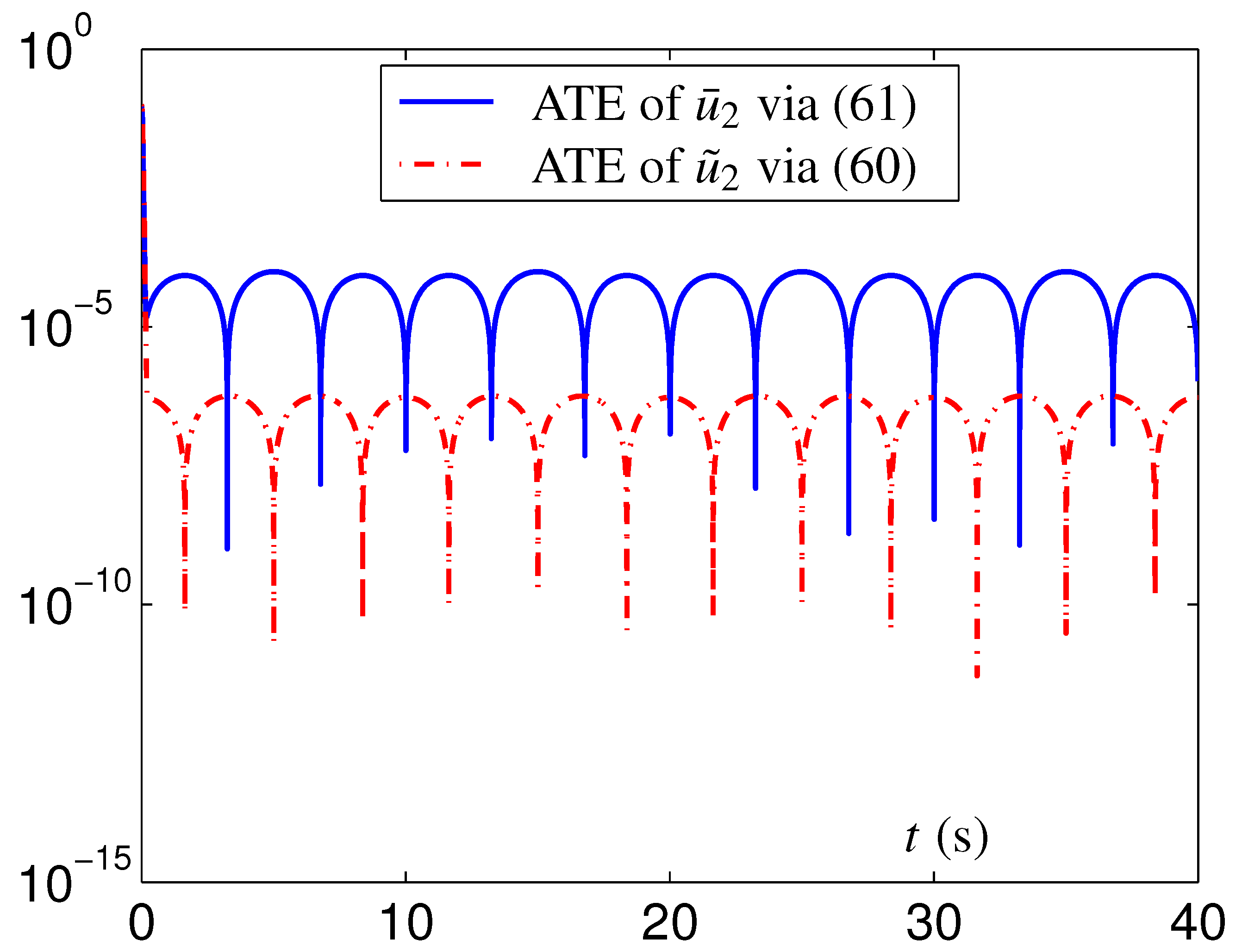
- The ZNN method with time delay is successfully adopted to solve the problem of tracking control for the TI system with NOF and the QI system with LOF, and the corresponding numerical experiment results substantiate the quadratic-order error pattern of order-N ZNN methods with time delay derived from the backward finite-divided difference formulas with quadratic-order precision.
2. Multiple-Order ZNN Methods with and without Time Delay
2.1. Backward Finite-Divided Difference Formulas
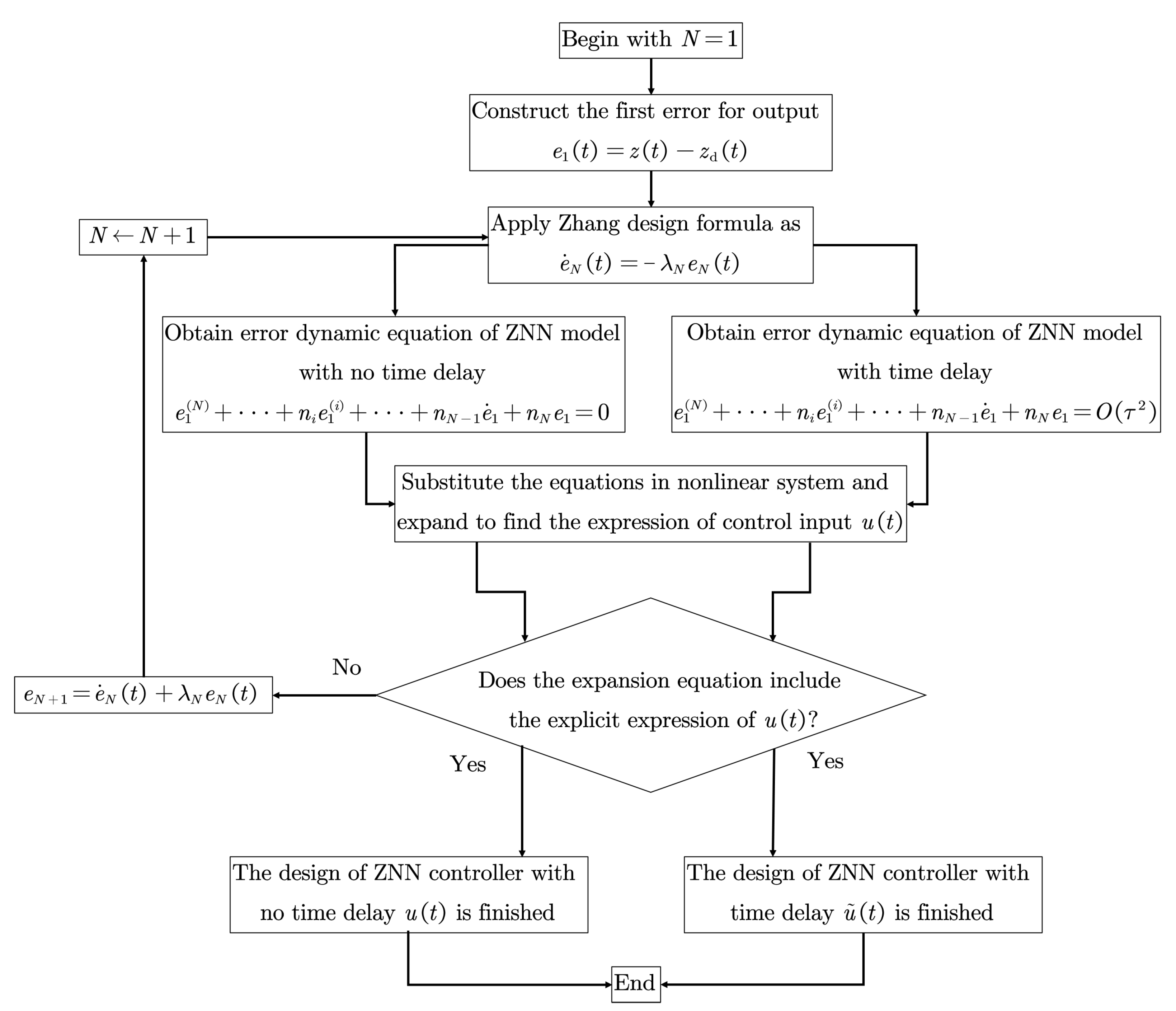
2.2. Order-N ZNN Methods with and without Time Delay
2.3. Error Analysis of Order-N ZNN Methods with and without Time Delay
3. Tracking Control of Triple-Integrator System with NOF
3.1. Controllers with and without Time Delay for TI System with NOF
3.2. TI System Tests with NOF
4. Tracking Control of Quintuple-Integrator System with LOF
4.1. Controllers with and without Time Delay for QI System with LOF
4.2. QI with LOF System Tests
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vanecek, A.; Celikovsky, S. Control Systems: From Linear Analysis to Synthesis of Chaos; Prentice Hall: London, UK, 1996. [Google Scholar]
- Lu, J.; Chen, G. A new chaotic attractor coined. Int. J. Bifurc. Chaos 2002, 12, 659–661. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, S. Controlling uncertain Lu system using backstepping design. Chaos Solitons Fractals 2003, 15, 897–902. [Google Scholar]
- Wang, N.; Sun, J.; Joo, E.M. Tracking-error-based universal adaptive fuzzy control for output tracking of nonlinear systems with completely unknown dynamics. IEEE Trans. Fuzzy Syst. 2018, 26, 869–883. [Google Scholar] [CrossRef]
- Han, S. Fuzzy supertwisting dynamic surface control for MIMO strict-feedback nonlinear dynamic systems with supertwisting nonlinear disturbance observer and a new partial tracking error constraint. IEEE Trans. Fuzzy Syst. 2019, 27, 2101–2114. [Google Scholar] [CrossRef]
- Dimanidis, I.S.; Bechlioulis, C.P.; George, A.; Rovithakis, G.A. Output feedback approximation-free prescribed performance tracking control for uncertain MIMO nonlinear systems. IEEE Trans. Autom. Control 2020, 65, 5058–5069. [Google Scholar] [CrossRef]
- Dong, H.; Gao, S.; Ning, B.; Tang, T.; Li, Y.; Valavanis, K.P. Error-driven nonlinear feedback design for fuzzy adaptive dynamic surface control of nonlinear systems with prescribed tracking performance. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1013–1023. [Google Scholar] [CrossRef]
- Shu, F.; Zhai, J. Dynamic event-triggered tracking control for a class of p-normal nonlinear systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 808–817. [Google Scholar] [CrossRef]
- Marchand, N. Further results on global stabilization for multiple integrators with bounded controls. In Proceedings of the 42nd IEEE International Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; pp. 4440–4444. [Google Scholar]
- Rao, V.G.; Bernstein, D.S. Naive control of the double integrator. IEEE Control Syst. Mag. 2001, 21, 86–97. [Google Scholar]
- Feki, M. An adaptive chaos synchronization scheme applied to secure communication. Chaos Solitons Fractals 2003, 18, 141–148. [Google Scholar] [CrossRef]
- Addabbo, T.; Fort, A.; Kocarev, L.; Rocchi, S.; Vignoli, V. Pseudo-chaotic lossy compressors for true random number generation. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 58, 1897–1909. [Google Scholar] [CrossRef]
- Zhu, F.; Xu, J.; Chen, M. The combination of high-gain sliding mode observers used as receivers in secure communication. IEEE Trans Circuits Syst. I Regul. Pap. 2012, 59, 2702–2712. [Google Scholar] [CrossRef]
- Lu, H.H.C.; Yu, D.S.; Fitch, A.L.; Sreeram, V.; Chen, H. Controlling chaos in a memristor based circuit using a twin-T notch filter. IEEE Trans Circuits Syst. I Regul. Pap. 2011, 58, 1337–1344. [Google Scholar]
- Xu, D.; Wang, W. Research on applications of linear system theory in economics. In Proceedings of the IEEE International Conference on Control and Automation, Xiamen, China, 9–11 June 2010; pp. 1843–1847. [Google Scholar]
- Jarzebowska, E.M. Advanced programmed motion tracking control of nonholonomic mechanical systems. IEEE Trans. Robot. 2008, 24, 1315–1328. [Google Scholar] [CrossRef]
- Li, W. Tracking control of chaotic coronary artery system. Int. J. Syst. Sci. 2010, 43, 21–30. [Google Scholar] [CrossRef]
- Bialy, B.J.; Pasiliao, C.L.; Dinh, H.T.; Dixon, W.E. Tracking control of limit cycle oscillations in an aero-elastic system. ASME J. Dyn. Syst. Meas. Control 2014, 136, 064505. [Google Scholar] [CrossRef] [Green Version]
- Dontchev, A.L.; Krastanov, M.I.; Rockafellar, R.T.; Veliov, V.M. neural network based tracking control of underactuated autonomous underwater vehicles with model uncertainties. ASME J. Dyn. Syst. Meas. Control 2014, 137, 021004. [Google Scholar]
- Ott, E.; Grebogi, C.; Yorke, J.A. Controlling chaos. Phys. Rev. Lett. 1990, 64, 1196–1199. [Google Scholar] [CrossRef] [PubMed]
- Slotine, J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Hoboken, NJ, USA, 1991. [Google Scholar]
- Hauser, J.; Sastry, S.; Kokotovic, P. Nonlinear control via approximate input-output linearization: The ball and beam example. IEEE Trans. Automat. Control 1992, 37, 392–398. [Google Scholar] [CrossRef]
- Tomlin, C.J.; Sastry, S.S. Switching through singularities. Syst. Control Lett. 1998, 35, 145–154. [Google Scholar] [CrossRef]
- Kulkarni, A.; Purwar, S. Wavelet based adaptive backstepping controller for a class of nonregular systems with input constraints. Expert Syst. Appl. 2009, 36, 6686–6696. [Google Scholar] [CrossRef]
- Zhang, Y.; Yi, C. Zhang Neural Networks and Neural-Dynamic Method; Nova Science Publishers: Hauppauge, NY, USA, 2011. [Google Scholar]
- Teel, A.R. Global stabilization and restricted tracking for multiple integrators with bounded controls. Syst. Control Lett. 1992, 18, 165–171. [Google Scholar] [CrossRef]
- Marchand, N.; Hably, A. Global stabilization of multiple integrators with bounded controls. Automatica 2005, 41, 2147–2152. [Google Scholar] [CrossRef]
- Zhou, B.; Duan, G. Global stabilization of multiple integrators via saturated controls. IET Control Theory A 2007, 1, 1586–1593. [Google Scholar] [CrossRef]
- Zhang, Y.; Yi, C.; Guo, D.; Zheng, J. Comparison on zhang neural dynamics and gradient based neural dynamics for online solution of nonlinear time-varying equation. Neural Comput. Appl. 2011, 20, 1–7. [Google Scholar] [CrossRef]
- Zhang, Y.; Yin, Y.; Wu, H.; Guo, D. Zhang dynamics and gradient dynamics with tracking control application. In Proceedings of the International Symposium on Computational Intelligence and Design, Hangzhou, China, 28–29 October 2012; pp. 235–238. [Google Scholar]
- Yin, Y.; Xie, Q.; Wang, Y.; Chen, D.; Zhang, Y. ZG control for ship course tracking with singularity considered and solved. In Proceedings of the IEEE International Conference on Dependable, Autonomic and Secure Computing, Chengdu, China, 21–22 December 2013; pp. 352–357. [Google Scholar]
- Zhang, Y.; Chen, D.; Yin, Y.; Guo, D.; Xie, Q. ZG tracking control of Lu system with multiple inputs and with division-by-zero problem solved. In Proceedings of the Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 3477–3482. [Google Scholar]
- Zhang, Y.; Zhai, K.; Wang, Y.; Chen, D.; Peng, C. Design and illustration of ZG controllers for linear and nonlinear tracking control of double-integrator system. In Proceedings of the Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 3462–3467. [Google Scholar]
- Zhang, Y.; Xiao, Z.; Guo, D.; Mao, M.; Yin, Y. Singularity-conquering tracking control of a class of chaotic systems using Zhang-gradient dynamics. IET Control Theory A 2015, 9, 871–881. [Google Scholar] [CrossRef]
- Jin, L.; Li, S.; Hu, B. RNN models for dynamic matrix inversion: A control-theoretical perspective. IEEE Trans. Ind. Inform. 2018, 14, 189–199. [Google Scholar] [CrossRef]
- Qin, S.; Feng, J.; Song, J.; Wen, X.; Xu, C. A one-layer recurrent neural network for constrained complex-variable convex optimization. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 534–544. [Google Scholar] [CrossRef]
- Jin, L.; Li, S.; La, H.M.; Zhang, X.; Hu, B. Dynamic task allocation in multi-robot coordination for moving target tracking: A distributed approach. Automatica 2019, 100, 75–81. [Google Scholar] [CrossRef]
- Jin, L.; Yan, J.; Du, X.; Xiao, X.; Fu, D. RNN for solving time-variant generalized Sylvester equation with applications to robots and acoustic source localization. IEEE Trans. Ind. Inform. 2020, 16, 6359–6369. [Google Scholar] [CrossRef]
- Qin, S.; Gu, S.; Zhang, N. Recent developments in dynamic modeling, control and applications of neural networks. Cybern. Syst. 2021, 52, 1–2. [Google Scholar] [CrossRef]
- Zhang, Y.; Ding, S.; Chen, D.; Mao, M.; Zhai, K. Zhang-gradient controllers for tracking control of multiple-integrator systems. ASME J. Dyn. Sys. Meas. Control 2015, 137, 111013. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, Y.; Qiao, T.; Tan, M.; Zhang, Y. Tracking control of modified Lorenz nonlinear system using ZG neural dynamics with additive input or mixed inputs. Neurocomputing 2016, 196, 82–94. [Google Scholar] [CrossRef]
- Li, J.; Mao, M.; Zhang, Y. Simpler ZD-achieving controller for chaotic systems synchronization with parameter perturbation, model uncertainty and external disturbance as compared with other controllers. Optik 2017, 131, 364–373. [Google Scholar] [CrossRef]
- Huang, H.; Zhang, J.; Li, J.; Yang, M.; Zhang, Y. Discrete-time Lu chaotic systems synchronization with one ZND controller input and ZeaD formulas. In Proceedings of the International Conference on Machine Learning and Cybernetics, Chengdu, China, 15–18 July 2018; pp. 6–12. [Google Scholar]
- Ling, Y.; Zhang, D.; Zhang, J.; Qiu, B.; Zhang, Y. Synchronizing genesio chaotic system by Zhang-dynamics controller without or with noise perturbation. In Proceedings of the Chinese Control Conference, Guangzhou, China, 27–30 July 2019; pp. 35–41. [Google Scholar]
- Zhang, Y.; Yang, M.; Qiu, B.; Li, J.; Zhu, M. From mathematical equivalence such as Ma equivalence to generalized Zhang equivalency including gradient equivalency. Theor. Comput. Sci. 2020, 817, 44–54. [Google Scholar] [CrossRef]
- Li, Z.; Yang, M.; Zhang, Y.; Hu, C.; Kang, X. Zhang Neural Dynamics (ZND) tracking control of multiple integrator systems with noise disturbances: Theoretical and simulative results. In Proceedings of the International Conference on Advanced Computational Intelligence, Dali, China, 14–16 August 2020; pp. 1–7. [Google Scholar]
- Qin, S.; Cheng, Q.; Chen, G. Global exponential stability of uncertain neural networks with discontinuous Lurie-type activation and mixed delays. Neurocomputing 2016, 198, 12–19. [Google Scholar] [CrossRef] [Green Version]
- Stamov, G.; Stamova, I.; Simeonov, S.; Torlakov, I. On the stability with respect to H-manifolds for Cohen–Grossberg-type bidirectional associative memory neural networks with variable impulsive perturbations and time-varying delays. Mathematics 2020, 8, 335. [Google Scholar] [CrossRef] [Green Version]
- Chanthorn, P.; Rajchakit, G.; Ramalingam, S.; Lim, C.P.; Ramachandran, R. Robust dissipativity analysis of Hopfield-type complex-valued neural networks with time-varying delays and linear fractional uncertainties. Mathematics 2020, 8, 595. [Google Scholar] [CrossRef] [Green Version]
- Chanthorn, P.; Rajchakit, G.; Thipcha, J.; Emharuethai, C.; Sriraman, R.; Lim, C.P.; Ramachandran, R. Robust stability of complex-valued stochastic neural networks with time-varying delays and parameter uncertainties. Mathematics 2020, 8, 742. [Google Scholar] [CrossRef]
- Humphries, U.; Rajchakit, G.; Kaewmesri, P.; Chanthorn, P.; Sriraman, R.; Samidurai, R.; Lim, C.P. Stochastic memristive quaternion-valued neural networks with time delays: An analysis on mean square exponential input-to-state stability. Mathematics 2020, 8, 815. [Google Scholar] [CrossRef]
- Popa, C.-A.; Kaslik, E. Finite-time Mittag-Leffler synchronization of neutral-type fractional-order neural networks with leakage delay and time-varying delays. Mathematics 2020, 8, 1146. [Google Scholar] [CrossRef]
- Qin, S.; Ma, Q.; Feng, J.; Xu, C. Multistability of almost periodic solution for memristive Cohen-Grossberg neural networks with mixed delays. IEEE Trans. Neural Netw. Learn Syst. 2020, 31, 1914–1926. [Google Scholar] [CrossRef]
- Qin, S.; Gu, L.; Pan, X. Exponential stability of periodic solution for a memristor-based inertial neural network with time delays. Neural Comput. Appl. 2020, 32, 3265–3281. [Google Scholar] [CrossRef]
- Akhmet, M.; Aruğaslan Çinçin, D.; Tleubergenova, M.; Nugayeva, Z. Unpredictable oscillations for Hopfield-type neural networks with delayed and advanced arguments. Mathematics 2021, 9, 571. [Google Scholar] [CrossRef]
- Rajchakit, G.; Sriraman, R.; Lim, C.P.; Samang, P.; Hammachukiattikul, P. Synchronization in finite-time analysis of Clifford-valued neural networks with finite-time distributed delays. Mathematics 2021, 9, 1163. [Google Scholar] [CrossRef]
- Pan, J.; Xiong, L. Novel criteria of stability for delayed memristive quaternionic neural networks: Directly quaternionic method. Mathematics 2021, 9, 1291. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, H.; Zhang, W.; Zhang, H. Finite-time projective synchronization of caputo type fractional complex-valued delayed neural networks. Mathematics 2021, 9, 1406. [Google Scholar] [CrossRef]
- Liu, W.; Huang, J.; Yao, Q. Stability analysis of pseudo-almost periodic solution for a class of cellular neural network with D-operator and time-varying delays. Mathematics 2021, 9, 1951. [Google Scholar] [CrossRef]
- Yang, Z.; Zhang, Z. Finite-time synchronization analysis for BAM neural networks with time-varying delays by applying the maximum-value approach with new inequalities. Mathematics 2022, 10, 835. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, Y. Adaptive synchronization control and parameters identification for chaotic fractional neural networks with time-varying delays. Neural Process. Lett. 2021, 53, 2729–2745. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, J.; Qiu, B.; Li, W. Zhang neural dynamics approximated by backward difference rules in form of time delay differential equation. Neural Process. Lett. 2019, 50, 1735–1753. [Google Scholar] [CrossRef]
- Hairer, E.; Wanner, G. Solving Ordinary Differential Equations II; Springer: Berlin, Germany, 1991. [Google Scholar]
- Pearson, D. Calculus and Ordinary Differential Equations; Butterworth Heinemann: Oxford, UK, 1995. [Google Scholar]
- Zhou, B.; Duan, G.; Li, Z. On improving transient performance in global control of multiple integrators system by bounded feedback. Syst. Control Lett. 2008, 57, 867–875. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order-n Derivative Function | Backward Finite-Divided Difference Formula | Truncation Error |
|---|---|---|
| (47) | (48) | (49) | |||
|---|---|---|---|---|---|
| - | - | - | - | ||
| Criterion | ||||||
|---|---|---|---|---|---|---|
| - | 2 | 2 | 5 | 2 | ||
| (49) | MSSTE | |||||
| (≈) | - | 2 | 2 | 5 | 2 | |
| (48) | MSSTE | |||||
| (≈) | - | 4 | 4 | 25 | 4 |
| (59) | (60) | (61) | |||
|---|---|---|---|---|---|
| - | - | - | - | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, P.; Zhang, Y. Tracking Control for Triple-Integrator and Quintuple-Integrator Systems with Single Input Using Zhang Neural Network with Time Delay Caused by Backward Finite-Divided Difference Formulas for Multiple-Order Derivatives. Mathematics 2022, 10, 1440. https://doi.org/10.3390/math10091440
Guo P, Zhang Y. Tracking Control for Triple-Integrator and Quintuple-Integrator Systems with Single Input Using Zhang Neural Network with Time Delay Caused by Backward Finite-Divided Difference Formulas for Multiple-Order Derivatives. Mathematics. 2022; 10(9):1440. https://doi.org/10.3390/math10091440
Chicago/Turabian StyleGuo, Pengfei, and Yunong Zhang. 2022. "Tracking Control for Triple-Integrator and Quintuple-Integrator Systems with Single Input Using Zhang Neural Network with Time Delay Caused by Backward Finite-Divided Difference Formulas for Multiple-Order Derivatives" Mathematics 10, no. 9: 1440. https://doi.org/10.3390/math10091440