
Parameter Identification and the Finite-Time Combination–Combination Synchronization of Fractional-Order Chaotic Systems with Different Structures under Multiple Stochastic Disturbances



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
2.1. Definitions and Lemmas of Fractional Derivative
2.2. Stability Theories of Fractional Order System
3. Problem Description and Assumptions
| , | , | , | , | , | , | , |
4. Sliding Mode Synchronization Controller Design within Finite Time
| , | , |
| , | , |
| , | , |
| . |
- (i)
- Assume the matrix , then the drive systems (18), (19) achieve the finite-time combination synchronization (FTCS) with the response system (21) provided the following controller:and the adaptive updating laws,
- (ii)
- Assume the matrix , then the drive systems (18), (19) achieve the FTCS with the response system (20) provided the following controller:and the adaptive updating laws,
- (i)
- Assume the matrices , then the drive system (19) achieve the FTCS with the response system (21) provided the following controller:and the adaptive updating laws,
- (ii)
- Assume the matrices , then the drive system (19) achieve the FTCS with the response system (20) provided the following controller:and the adaptive updating laws,
- (iii)
- Assume the matrices , then the drive system (18) achieve the FTCS with the response system (20) provided the following controller:and the adaptive updating laws,
- (iv)
- Assume the matrices , then the drive system (18) achieve the FTCS with the response system (21) provided the following controller:and the adaptive updating laws,
- (i)
- Assume the matrices , then the equilibrium point of response system (21) is asymptotically stable provided the following controller:and the adaptive updating laws,
- (ii)
- Assume the matrices , then the equilibrium point of response system (20) is asymptotically stable provided the following controller:and the adaptive updating laws,
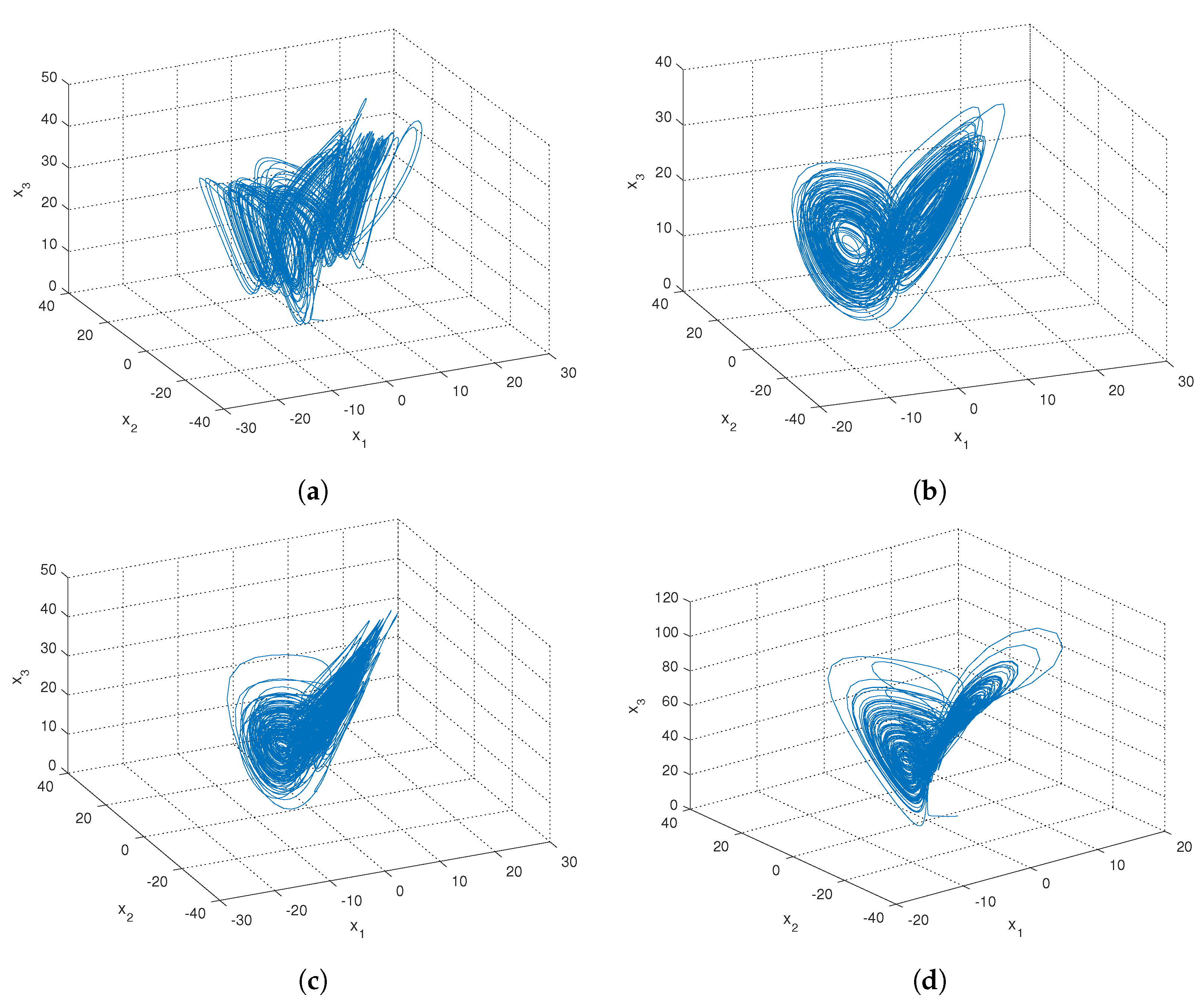
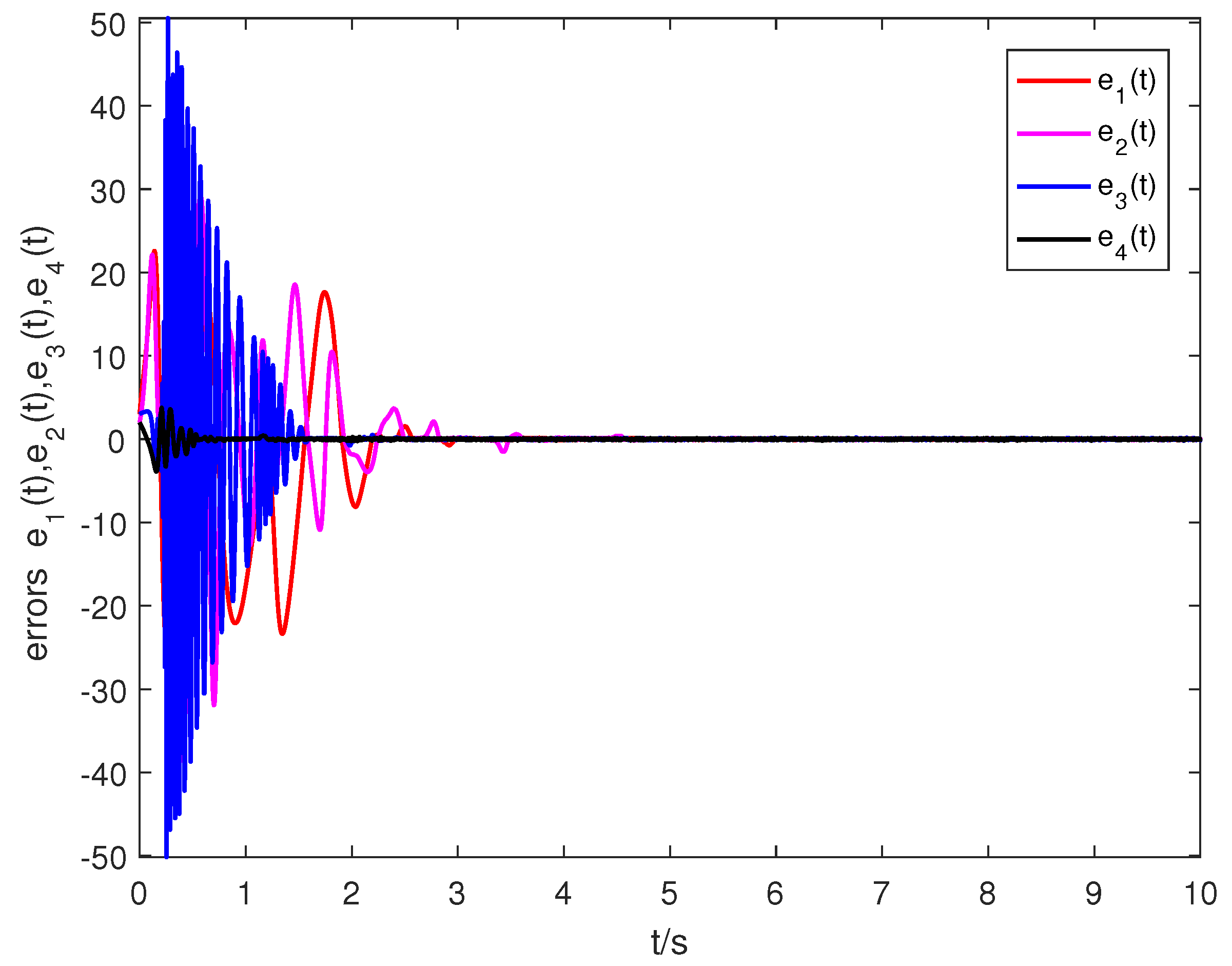
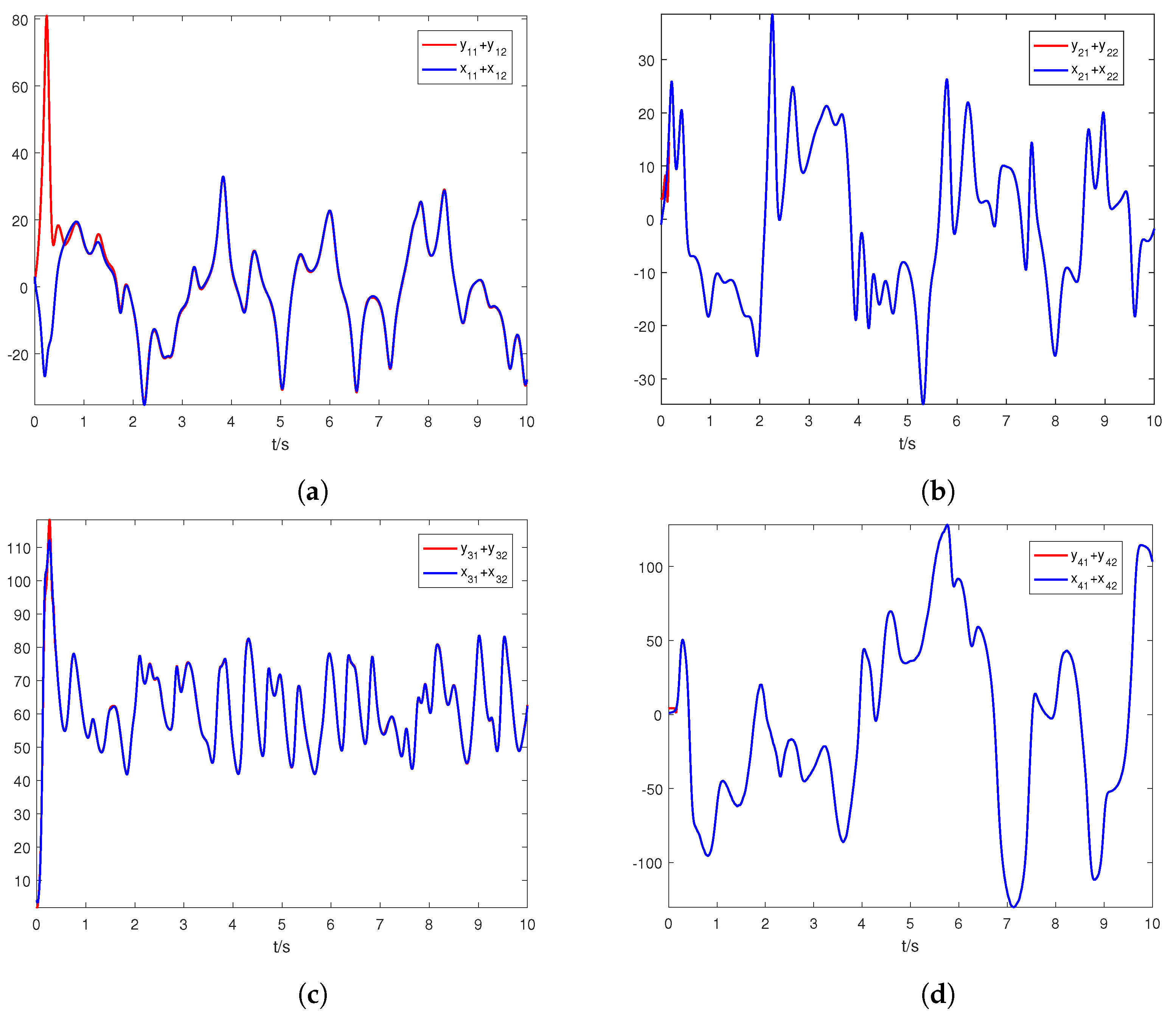
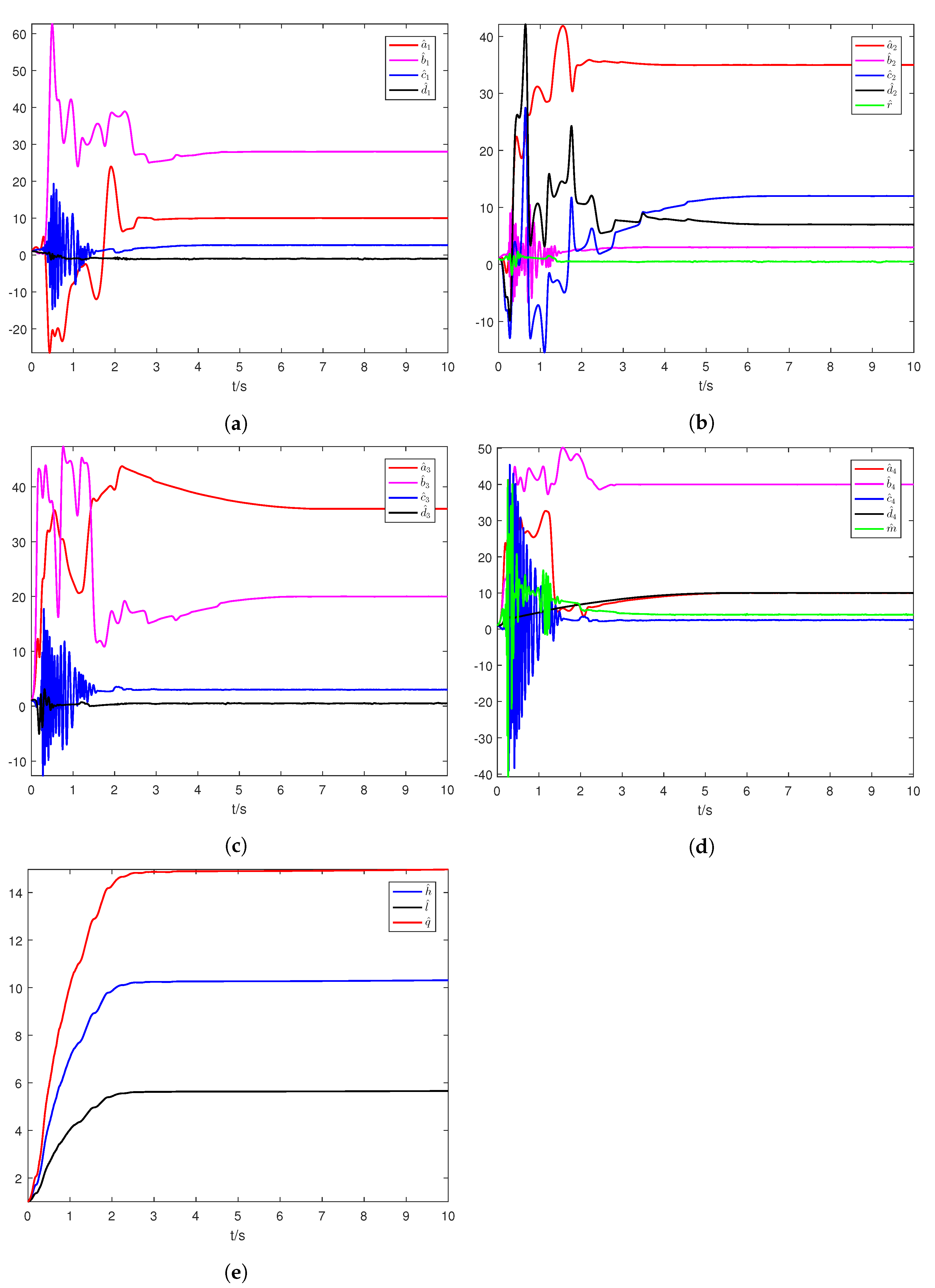
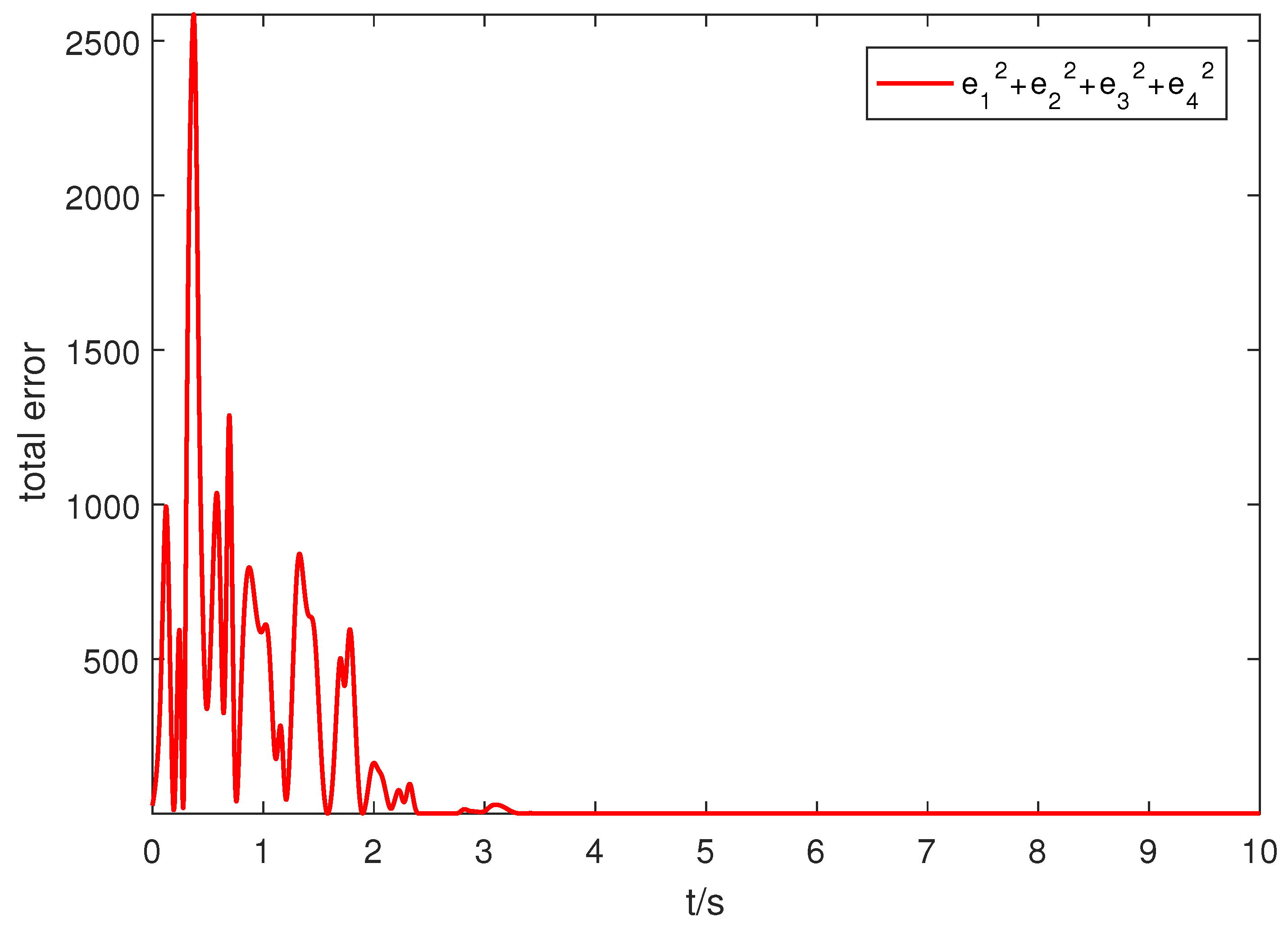
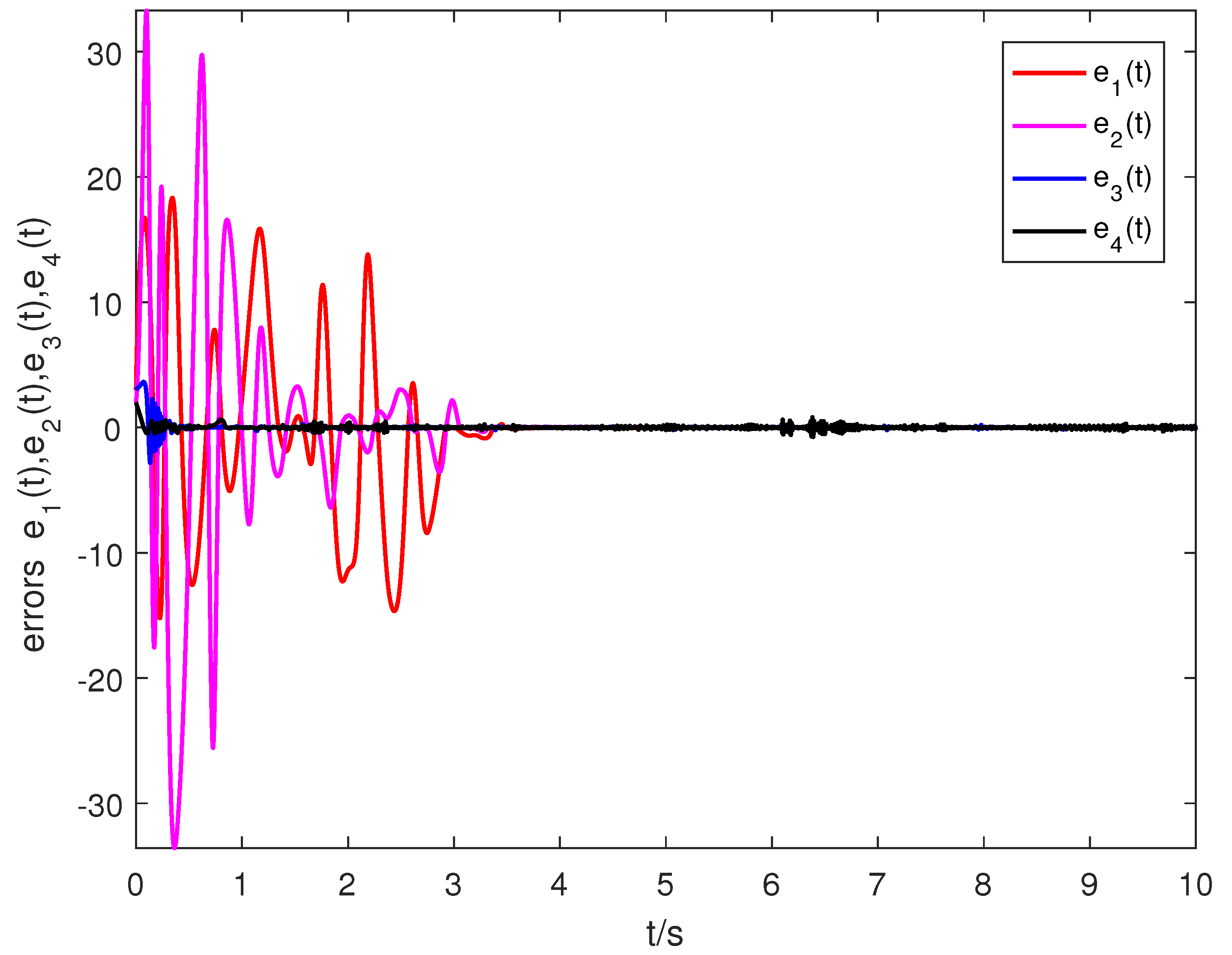
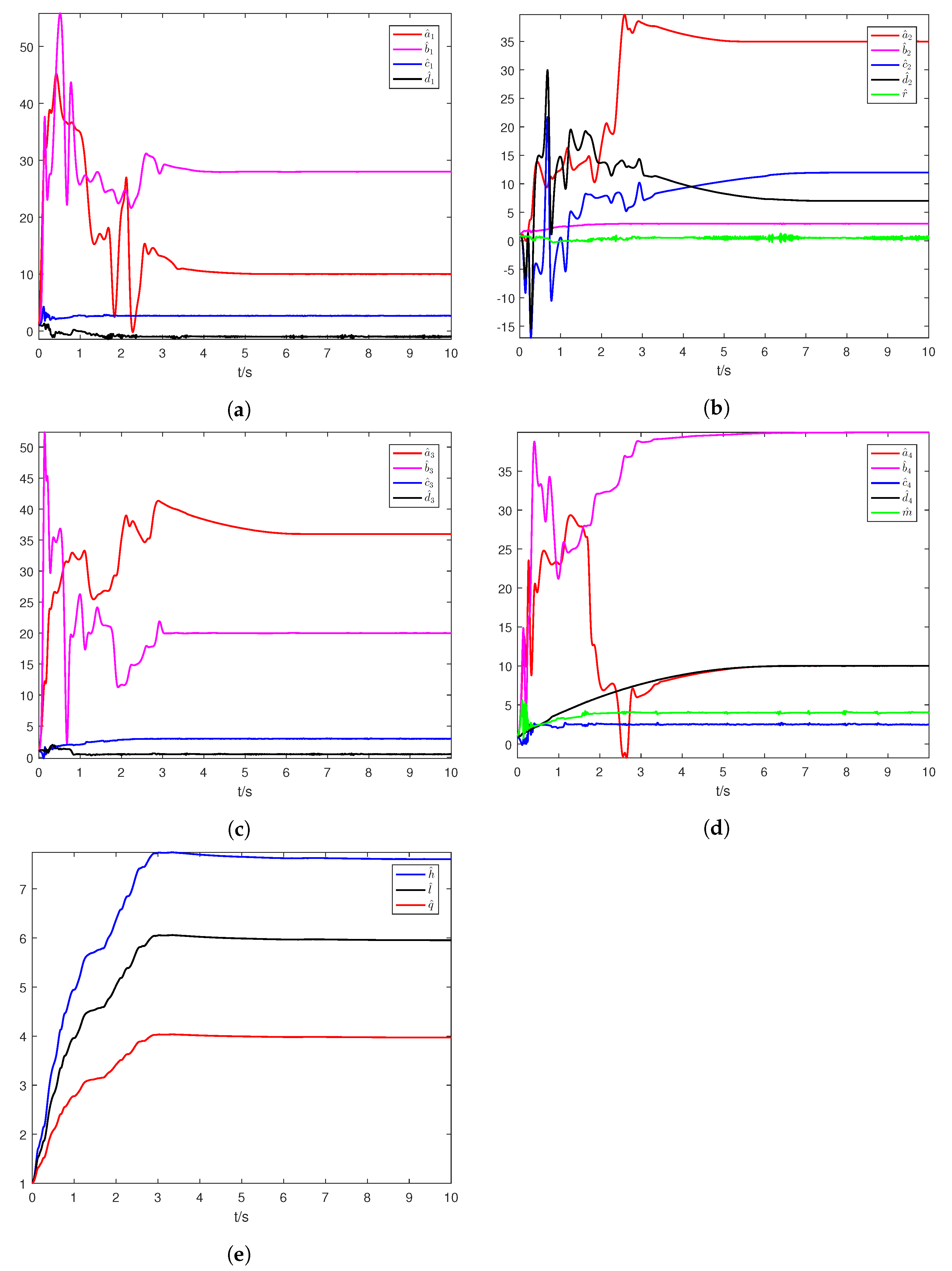
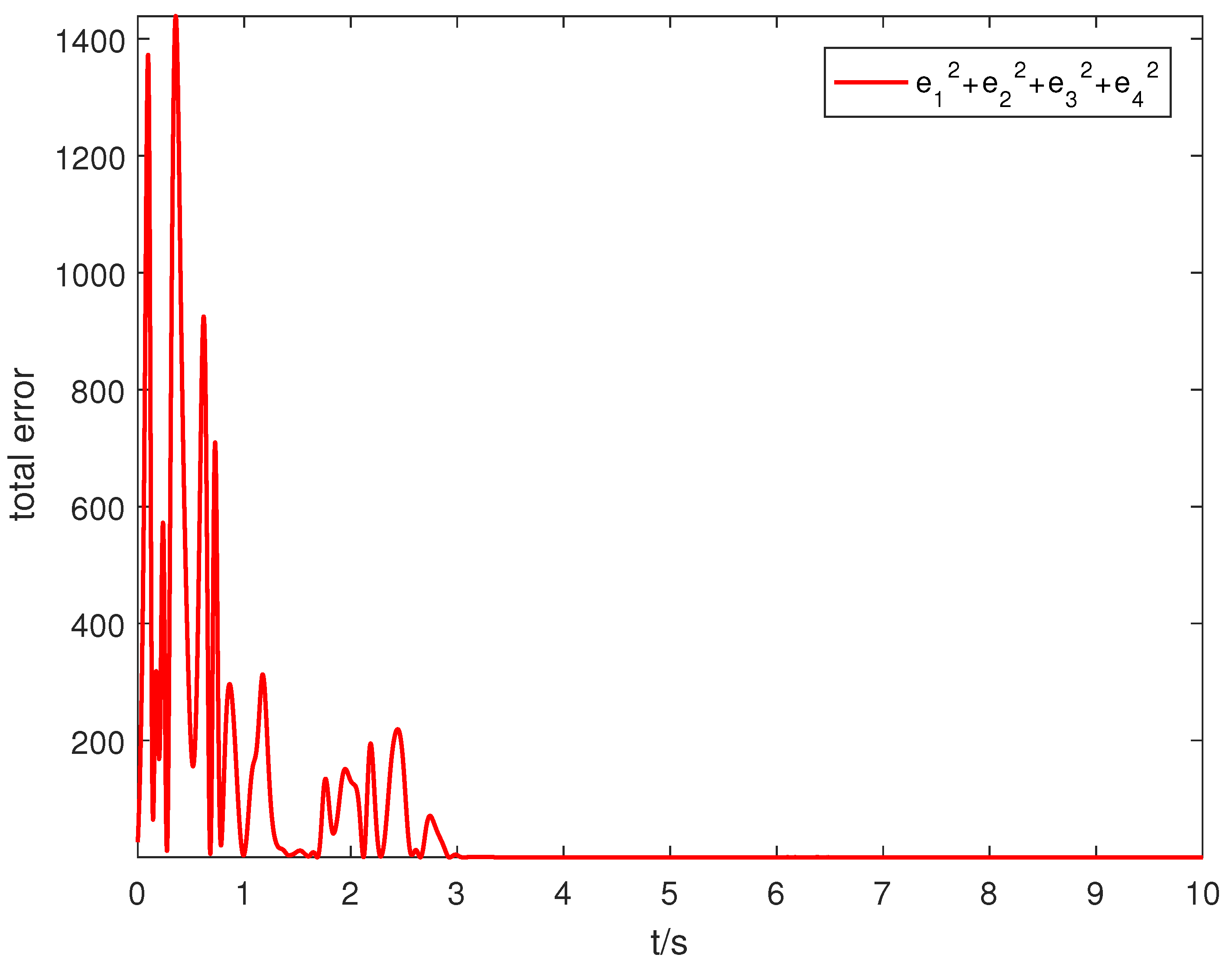
5. Numerical Simulation
| , | , |
| , | , |
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ping, Z.; Peng, Z. Drive-response synchronization for chaotic systems. J. Chong Qing Univ. 2002, 25, 77–79. [Google Scholar]
- Yu, J.; Hu, C.; Jiang, H. Projective synchronization for fractional neural networks. Neural Netw. 2014, 49, 87–95. [Google Scholar] [CrossRef] [PubMed]
- Shao, K.; Guo, H.; Han, F. Finite-time projective synchronization of fractional-order chaotic systems via soft variable structure control. J. Mech. Sci. Technol. 2020, 34, 369–376. [Google Scholar] [CrossRef]
- Qin, X.; Li, S.; Liu, H. Adaptive fuzzy synchronization of uncertain fractional-order chaotic systems with different structures and time-delays. Adv. Diff. Equ. 2019, 2019, 174. [Google Scholar] [CrossRef]
- Bouzeriba, A.; Boulkroune, A.; Bouden, T. Fuzzy adaptive synchronization of a class of fractional-order chaotic systems. In Proceedings of the 2015 3rd International Conference on Control, Engineering & Information Technology (CEIT), Tlemcen, Algeria, 25–27 May 2015; Volume 7, pp. 1–16. [Google Scholar]
- Liu, Y.J.; Gong, M.; Tong, S.; Chen, C.P.; Li, D.J. Adaptive fuzzy output feedback control for a class of nonlinear systems with full state constraints. IEEE Trans. Fuzzy. Syst. 2018, 26, 2607–2617. [Google Scholar] [CrossRef]
- Ha, S.; Chen, L.; Liu, H. Command filtered adaptive neural network synchronization control of fractional-order chaotic systems subject to unknown dead zones. J. Frankl. Inst. 2021, 358, 3376–3402. [Google Scholar] [CrossRef]
- Zeng, H.B.; Teo, K.L.; He, Y.; Xu, H.; Wang, W. Sampled-data synchronization control for chaotic neural networks subject to actuator saturation. Neurocomputing 2017, 185, 1656–1667. [Google Scholar] [CrossRef]
- Wang, J.; Xu, C. Stochastic feedback coupling synchronization of networked harmonic oscillators. Automatica 2018, 87, 404–411. [Google Scholar] [CrossRef]
- Li, H.L.; Jiang, Y.L.; Wang, Z.; Zhang, L.; Teng, Z. Parameter identification and adaptive-impulsive synchronization of uncertain complex networks with nonidentical topological structures. Optik-Int. J. Light Electron. Opt. 2015, 126, 5771–5776. [Google Scholar] [CrossRef]
- Li, X.F.; Chu, Y.D.; Leung, A.Y.; Zhang, H. Synchronization of uncertain chaotic systems via complete-adaptive-impulsive controls. Chaos Solitons Fractals 2017, 100, 24–30. [Google Scholar] [CrossRef]
- Kocamaz, U.E.; Cevher, B.; Uyaroğlu, Y. Control and synchronization of chaos with sliding mode control based on cubic reaching rule. Chaos Solitons Fractals 2017, 105, 92–98. [Google Scholar] [CrossRef]
- Vaidyanathan, S. Anti-synchronization of 3-cells cellular neural network attractors via integral sliding mode control. Int. J. PharmTech Res. 2016, 9, 193–205. [Google Scholar]
- Li, X.; Zhao, X.S. The chaotic synchronization of fractional-order and integer-order in a class of financial systems. J. Sci. Teach. Coll. Univ. 2020, 40, 1–4. [Google Scholar]
- Jing, W.; Guang, P. Design of a sliding mode controller for synchronization of fractional-order chaotic systems with different structures. J. Shanghai Jiaotong Univ. 2016, 50, 849–860. [Google Scholar]
- Jiang, N. The adaptive control synchronization of hyper-chaos lorenz system and hyper-chaos Rössler system. J. Taiyuan Norm Univ. 2014, 13, 47–50. [Google Scholar]
- Wei, X. Adaptive control and synchronization of Lü hyper-chaotic system. J. Honghe Univ. 2015, 13, 23–27. [Google Scholar]
- Li, T.; Wang, Y.; Zhao, C. Synchronization of fractional chaotic systems based on a simple Lyapunov function. Adv. Diff. Equ. 2017, 2017, 304. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.H.; Chen, Y.Q. Lyapunov functions for nabla discrete fractional order systems. ISA Trans. 2019, 88, 82–90. [Google Scholar] [CrossRef]
- Tirandaz, H.; Tavakoli, H.R.; Ahmadnia, M. Modified projective synchronization of chaotic systems with noise disturbance, an active nonlinear control method. Int. J. Electr. Comput. Eng. 2017, 7, 3436–3445. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.; Jahanzaib, L.S. Synchronization on the adaptive sliding mode controller for fractional order complex chaotic systems with uncertainty and disturbances. Int. J. Dyn. Control 2019, 7, 1419–1433. [Google Scholar] [CrossRef]
- Luo, R.; Su, H.; Zeng, Y. Synchronization of uncertain fractional-order chaotic systems via a novel adaptive controller. Chin. J. Phys. 2017, 55, 342–349. [Google Scholar] [CrossRef]
- Kekha Javan, A.A.; Shoeibi, A.; Zare, A.; Hosseini Izadi, N.; Jafari, M.; Alizadehsani, R.; Moridian, P.; Mosavi, A.; Acharya, U.R.; Nahavandi, S. Design of Adaptive-Robust Controller for Multi-State Synchronization of Chaotic Systems with Unknown and Time-Varying Delays and Its Application in Secure Communication. Sensors 2021, 21, 254. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.; Chaudhary, H. Hybrid projective combination-combination synchronization in non-identical hyperchaotic systems using adaptive control. Arab. J. Math. 2020, 9, 597–611. [Google Scholar] [CrossRef] [Green Version]
- Petras, I. Fractional-Order Nonlinear Systems, Modeling, Analysis and Simulation; Higher Education Press: Beijing, China, 2011. [Google Scholar]
- Mirrezapour, S.Z.; Zare, A.; Hallaji, M. A new fractional sliding mode controller based on nonlinear fractional-order proportional integral derivative controller structure to synchronize fractional-order chaotic systems with uncertainty and disturbances. J. Vib. Control 2021, 1–13. [Google Scholar] [CrossRef]
- Zhang, R.; Yang, S. Robust chaos synchronization of fractional-order chaotic systems with unknown parameters and uncertain perturbations. Nonlinear Dyn. 2012, 69, 983–992. [Google Scholar] [CrossRef]
- Ma, S.J.; Shen, Q.; Jing, H. Modified projective synchronization of stochastic fractional order chaotic systems with uncertain parameters. Nonlinear Dyn. 2013, 73, 93–100. [Google Scholar] [CrossRef]
- Wang, Q.; Qi, D.L. Synchronization for fractional order chaotic systems with uncertain parameters. Int. J. Control Autom. Syst. 2016, 14, 211–216. [Google Scholar] [CrossRef]
- Nian, F.; Liu, X.; Zhang, Y. Sliding mode synchronization of fractional-order complex chaotic system with parametric and external disturbances. Chaos Solitons Fractals 2018, 116, 22–28. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, X.; Li, D.; Yang, D. Adaptive Synchronization for a Class of Fractional Order Time-delay Uncertain Chaotic Systems via Fuzzy Fractional Order Neural Network. Int. J. Control Autom. Syst. 2019, 17, 1209–1220. [Google Scholar] [CrossRef]
- Deepika, D.; Sandeep, K.; Shiv, N. Uncertainty and disturbance estimator based robust synchronization for a class of uncertain fractional chaotic system via fractional order sliding mode control. Chaos Solitons Fractals 2018, 115, 196–203. [Google Scholar] [CrossRef]
- Bhat, S.; Bernstein, D. Finite-time stability of homo-gencous systems. In Proceedings of the ACC, Albuquergue, NM, USA, 6 December 1997; pp. 2513–2514. [Google Scholar]
- Velmurugan, G.; Rakkiyappan, R.; Cao, J. Finite-time synchronization of fractional-order memristor-based neural networks with time delays. Neural Netw. 2016, 73, 36–46. [Google Scholar] [CrossRef] [PubMed]
- Lin, M.L.; Yuan, Z.Z.; Cai, J.P. Finite-time synchronization between two different chaotic systems with uncertainties. J. Fujian Univ. Technol. 2019, 17, 77–82. [Google Scholar]
- Lan, T.L.; Wang, Y.J. Finite-time synchronization and parameters identification of a uncertain critical chaotic system. Math. Pract. Theory 2018, 48, 105–112. [Google Scholar]
- Rashidnejad, Z.; Karimaghaee, P. Synchronization of a class of uncertain chaotic systems utilizing a new finite-time fractional adaptive sliding mode control. Chaos Solitons Fractals 2020, 5, 100042. [Google Scholar] [CrossRef]
- Luo, Y.; Yao, Y. Finite-time synchronization of uncertain complex dynamic networks with time-varying delay. Adv. Diff. Equ. 2020, 2020, 32. [Google Scholar] [CrossRef]
- Mishra, A.K.; Das, S.; Yadav, V.K. Finite-time synchronization of multi-scroll chaotic systems with sigmoid non-linearity and uncertain terms. Chin. J. Phys. 2020, 75, 235–245. [Google Scholar] [CrossRef]
- Sweetha, S.; Sakthivel, R.; Harshavarthini, S. Finite-time synchronization of nonlinear fractional chaotic systems with stochastic actuator faults. Chaos Solitons Fractals 2020, 142, 110312. [Google Scholar] [CrossRef]
- Li, H.L.; Cao, J.; Jiang, H.; Alsaedi, A. Finite-time synchronization and parameter identification of uncertain fractional-order complex networks. Phys. A Stat. Mech. Appl. 2019, 533, 122027. [Google Scholar] [CrossRef]
- Sun, J.; Shen, Y.; Wang, X.; Chen, J. Finite-time combination-combination synchronization of four different chaotic systems with unknown parameters via sliding mode control. Nonlinear Dyn. 2014, 76, 383–397. [Google Scholar] [CrossRef]
- Luo, R.Z.; Wang, Y.L.; Deng, S.C. Combination synchronization of three classic chaotic systems using active back-stepping design. Chaos Interdiscip. J. Nonlinear Sci. 2011, 21, 043114. [Google Scholar]
- Luo, R.Z.; Wang, Y.L. Finite-time stochastic combination synchronization of three different chaotic systems and its application in secure communication. Chaos Interdiscip. J. Nonlinear Sci. 2012, 22, 821–824. [Google Scholar]
- Khan, A.; Khattar, D.; Prajapati, N. Dual combination combination multi switching synchronization of eight chaotic systems. Chin. J. Phys. 2017, 55, 1209–1218. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, I.; Shafiq, M.; Al-Sawalha, M.M. Globally exponential multi switching-combination synchronization control of chaotic systems for secure communications. Chin. J. Phys. 2018, 56, 974–987. [Google Scholar] [CrossRef]
- Khan, A.; Nigar, U. Adaptive hybrid complex projective combination-combination synchronization in non-identical hyper-chaotic complex systems. Int. J. Dynam. Control 2019, 7, 1404–1418. [Google Scholar] [CrossRef]
- Vincent, U.E.; Saseyi, A.O.; Mcclintock, P. Multi-switching combination synchronization of chaotic systems. Nonlinear Dyn. 2015, 80, 845–854. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Cui, G.; Wang, Y.; Shen, Y. Combination complex synchronization of three chaotic complex systems. Nonlinear Dyn. 2015, 79, 953–965. [Google Scholar] [CrossRef]
- Khan, A.; Budhraja, M.; Ibraheem, A. Combination-combination synchronisation of time-delay chaotic systems for unknown parameters with uncertainties and external disturbances. Pramana 2018, 91, 20. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic: New York, NY, USA, 1999. [Google Scholar]
- Hardy, G.H.; Littlewood, J.E.; Polya, G. Inequalities; Cambridge University Press: Cambridge, UK, 1952. [Google Scholar]
- Li, Y.; Chen, Y.Q.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Comput. Math. Appl. 2009, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Li, C.P.; Deng, W.H. Remarks on fractional derivatives. Appl. Math. Comput. 2007, 187, 777–784. [Google Scholar] [CrossRef]
- Li, J.L.; Xi, J.X.; Wang, L. Minimum-energy synchronization for interconnected networks with non-periodical information silence. Neurocomputing 2022, 481, 310–321. [Google Scholar] [CrossRef]
- Aleksandra, V.; Lazaros, M.; Vyacheslav, G. Fast synchronization of symmetric Hnon maps using adaptive symmetry control. Chaos Solitons Fractals 2022, 155, 111732. [Google Scholar]
- Kashkynbayev, A.; Issakhanov, A.; Otkel, M.; Kurths, J. Finite-time and fixed-time synchronization analysis of shunting inhibitory memristive neural networks with time-varying delays. Chaos Solitons Fractals 2022, 156, 111866. [Google Scholar] [CrossRef]
- Yuan, W.Y.; Ma, Y.C. Finite-time H∞ synchronization for complex dynamical networks with time-varying delays based on adaptive control. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Y.N.; Zhang, J. Novel fractional-order decentralized control for nonlinear fractional-order composite systems with time delays. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Li, Q.; Liu, S.; Chen, Y. Combination event-triggered adaptive networked synchronization communication for nonlinear uncertain fractional-order chaotic systems. Appl. Math. Comput. 2018, 333, 521–535. [Google Scholar] [CrossRef]
- Chen, X.; Park, J.H.; Cao, J.; Qiu, J. Adaptive synchronization of multiple uncertain coupled chaotic systems via sliding mode control. Neurocomputing 2017, 273, 9–21. [Google Scholar] [CrossRef]
- Khan, A. Chaotic analysis and combination-combination synchronization of a novel hyperchaotic system without any equilibria. Chin. J. Phys. 2018, 56, 238–251. [Google Scholar] [CrossRef]
- Sun, J.; Shen, Y.; Zhang, G.; Xu, C.; Cui, G. Combination-combination synchronization among four identical or different chaotic systems. Nonlinear Dyn. 2013, 73, 1211–1222. [Google Scholar] [CrossRef]
- Zerimeche, H.; Houmor, T.; Berkane, A. Combination synchronization of different dimensions fractional-order non-autonomous chaotic systems using scaling matrix. Int. J. Dyn. Control 2021, 9, 788–796. [Google Scholar] [CrossRef]
- Yadav, V.K.; Prasad, G.; Srivastava, M.; Das, S. Combination-combination phase synchronization among non-identical fractional order complex chaotic systems via nonlinear control. Int. J. Dyn. Control 2018, 7, 330–340. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Y.; Wang, Y.; Shen, Y. Finite-time synchronization between two complex-variable chaotic systems with unknown parameters via nonsingular terminal sliding mode control. Nonlinear Dyn. 2016, 85, 1105–1117. [Google Scholar] [CrossRef]
- Mossa Al-sawalha, M. Synchronization of different order fractional-order chaotic systems using modify adaptive sliding mode control. Adv. Differ. Equ. 2020, 2020, 417. [Google Scholar] [CrossRef]
- Ouannas, A.; Grassi, G.; Ziar, T. On a Function Projective Synchronization Scheme for non-identical Fractional-order chaotic (hyperchaotic) systems with different dimensions and orders. Optik 2017, 136, 513–523. [Google Scholar] [CrossRef]
- Zhang, W.W.; Chen, D.Y. Hybrid Projective Synchronization of Different Dimensional Fractional Order Chaotic Systems with Time Delay and Different Orders. Chin. J. Eng. Math. 2017, 34, 321–330. [Google Scholar]
- Song, S.; Song, X.N.; Pathak, N. Multi-switching adaptive synchronization of two fractional-order chaotic systems with different structure and different order. Int. J. Control Autom. Syst. 2017, 15, 1524–1535. [Google Scholar] [CrossRef]
- Zhen, W.; Xia, H.; Zhao, Z. Synchronization of nonidentical chaotic fractional-order systems with different orders of fractional derivatives. Nonlinear Dyn. 2012, 69, 999–1007. [Google Scholar]
- Si, G.; Sun, Z.; Zhang, Y.; Chen, W. Projective synchronization of different fractional-order chaotic systems with non-identical orders. Nonlinear Anal. Real World Appl. 2012, 13, 1761–1771. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, W.; Li, T.; Sajid, M.; Ali, S.; Pu, L. Parameter Identification and the Finite-Time Combination–Combination Synchronization of Fractional-Order Chaotic Systems with Different Structures under Multiple Stochastic Disturbances. Mathematics 2022, 10, 712. https://doi.org/10.3390/math10050712
Pan W, Li T, Sajid M, Ali S, Pu L. Parameter Identification and the Finite-Time Combination–Combination Synchronization of Fractional-Order Chaotic Systems with Different Structures under Multiple Stochastic Disturbances. Mathematics. 2022; 10(5):712. https://doi.org/10.3390/math10050712
Chicago/Turabian StylePan, Weiqiu, Tianzeng Li, Muhammad Sajid, Safdar Ali, and Lingping Pu. 2022. "Parameter Identification and the Finite-Time Combination–Combination Synchronization of Fractional-Order Chaotic Systems with Different Structures under Multiple Stochastic Disturbances" Mathematics 10, no. 5: 712. https://doi.org/10.3390/math10050712