
Framework for Integrated Use of Agent-Based and Ambient-Oriented Modeling

Abstract
:1. Introduction
- How can complex systems with agents that contain other agents and have the ability to move within a limited location can be modeled?
- How can one represent different agents of different levels based on their dependencies?
- How can we add details such as message sending or receiving from certain linked agents to the representation of dependencies?
2. Background

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Strengths | Abstraction | Simulation Software |
|---|---|---|---|
| ABM | Simulation friendliness and flexibility [25,27], [28,30], [31,32], [34,39], [40,42], [35,38]. | It supports adaptive abstraction, cross-level interaction, abstraction of real environment, and coupling of heterogeneous models [3,60,67] [61,68]. | NetLogo is used by [69]. There are more than eighty agent-based modeling and simulation tools as discussed in [70]. |
| AOM | Representation of inclusion relations and messages in models [21,22], [6,24]. | The models that are developed using this approach have not involved any data such as in [5,21,71]. | Ambinet, an environment for ambient-oriented modeling [6]. However, this framework is not very mature and is not marketed the same as the tools for ABM. |
3. Use of Agent-Based and Ambient-Oriented Modeling Approaches in Combination
3.1. Integrated Framework for Modeling
- 1.
- ≠ ≠ ≠ ≠ ⋯≠
- 2.
- = = = = ⋯=
- 3.
- ⇒ ⇒ ⇒ ⇒ ⋯ ⇒
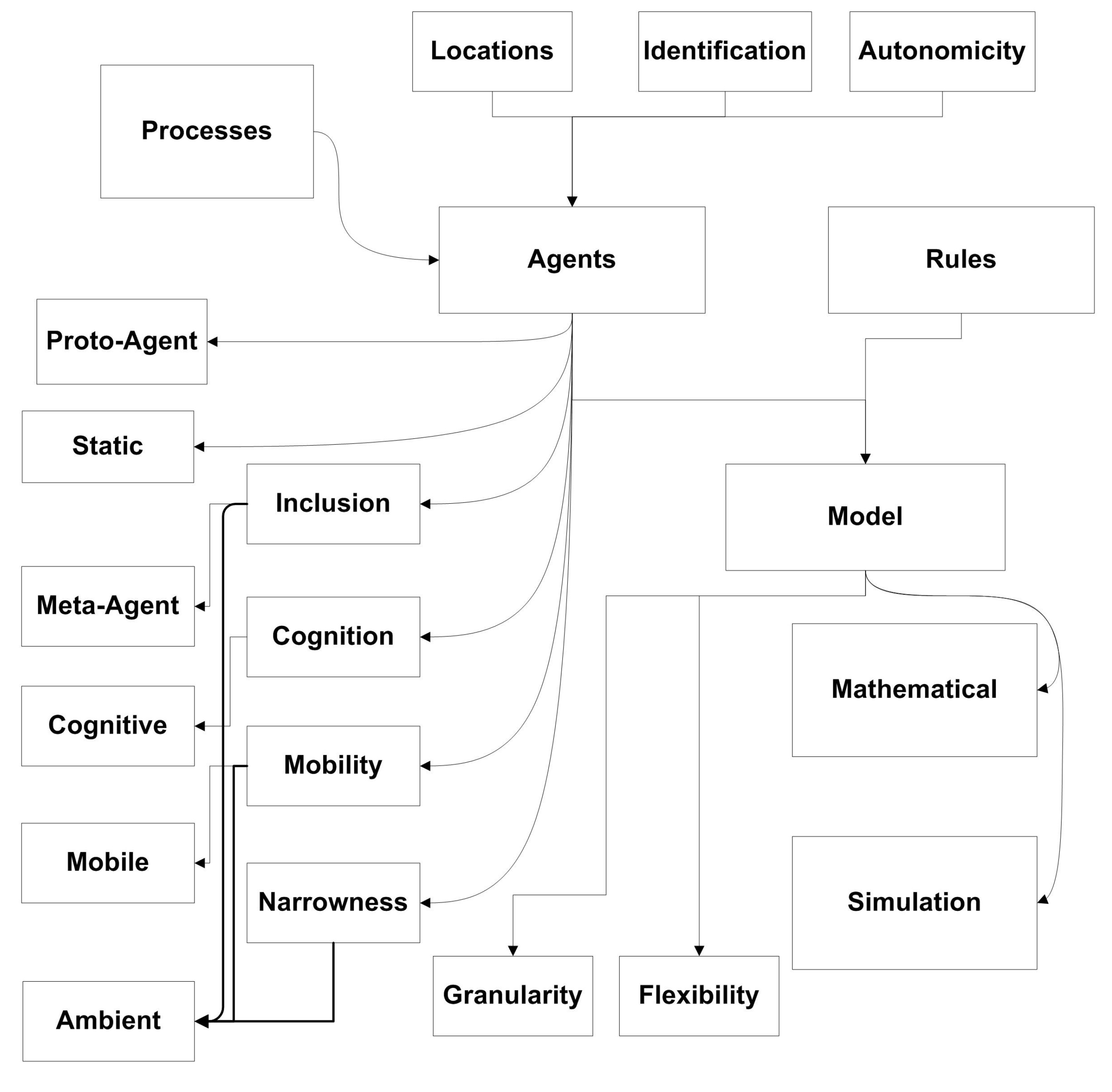
3.2. Agents
- is the property of autonomicity for function f;
- i is the identifier of the agent;
- L is the location of agent where it may exist on landscape and ;
- is set of optional properties possessed by an agent. may be empty, single, or multiple for a specific agent.
3.3. Ambients
- is the property of autonomicity for function f;
- i is the identifier of the ambient;
- L is the location of ambient where it may exist on landscape and ;
- is set of optional properties possessed by an ambient. must hold mobility and inclusion;
- ν is the narrowness which an ambient must hold.
- The symbol “↑” denotes a parent. This means that if we say “X” is a parent of “Y”, then the relation may be represented as X ↑ Y. If “X” is an airplane and “Y” is a passenger, then ambient “X” is the parent of ambient “Y”.
- The symbol “↓” denotes a child. This means that if we say “Y” is a child of “X”, then the relation may be represented as Y ↓ X. If “X” is an airplane and “Y” is a passenger, then ambient “Y” is the child of ambient “X”.
- The symbol “” denotes siblings. This means that if we say “X” and “Y” are two siblings, then the relation may be represented as X Y. If “X” and “Y” are both two passengers traveling in same airplane, then we may call “X” and “Y” siblings.
- The symbol “” denotes sending a message.
- The symbol ““ denotes receiving a message.
3.4. Relation of Agent and Ambient
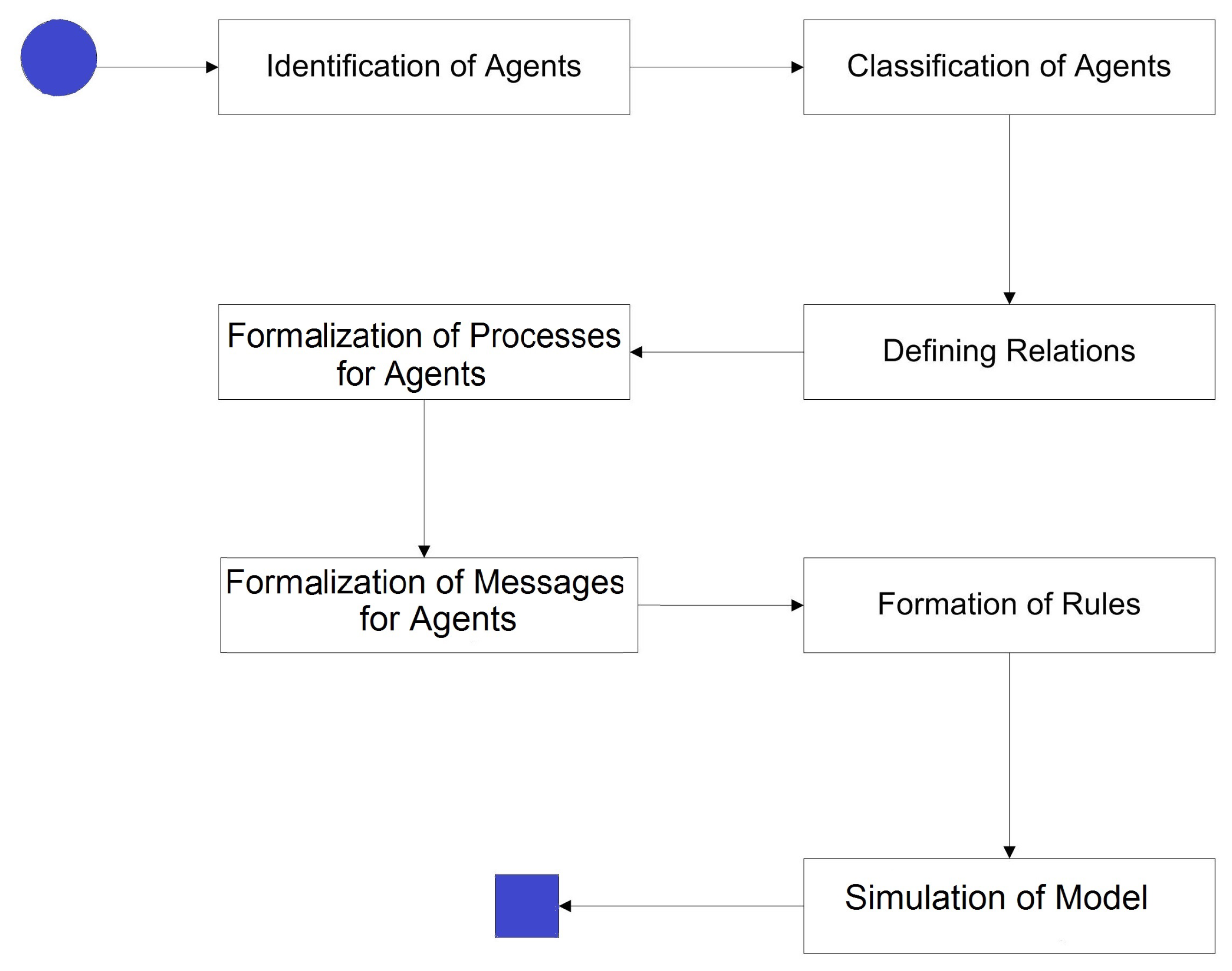
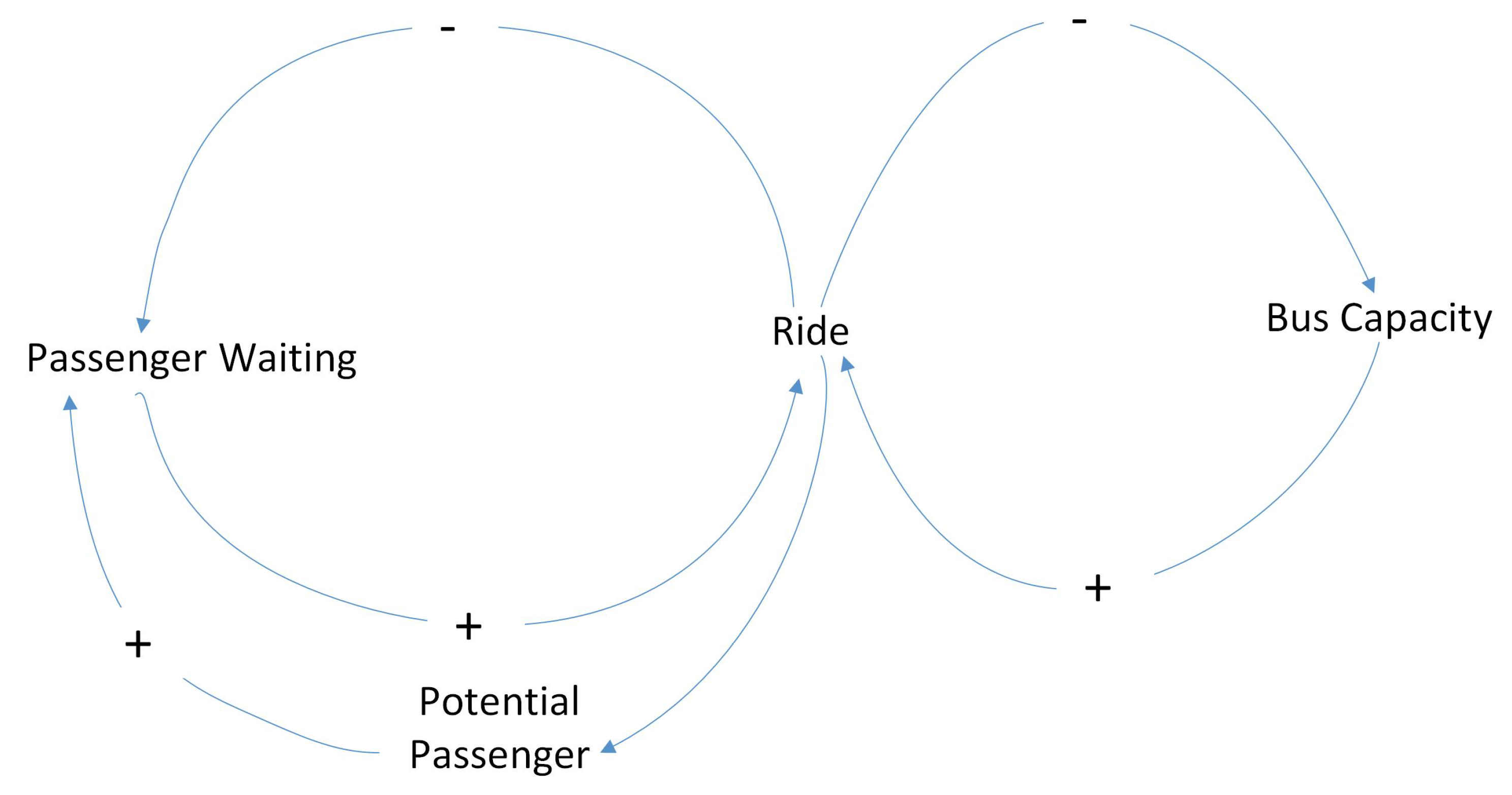
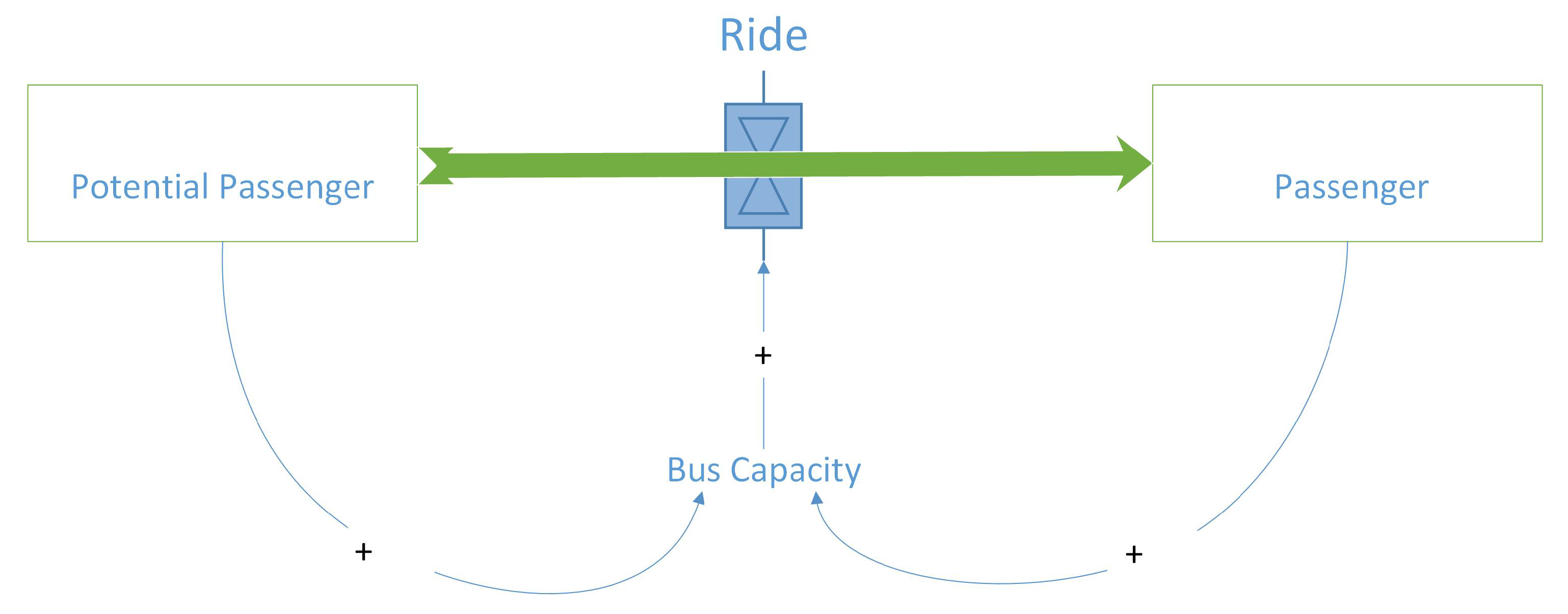
4. Bus Rapid Transit System Model: A Modeling Scenario
4.1. Identification of Agents
- Buses;
- People;
- Stations.
4.2. Classification of Agents
- Buses: Buses are ambients;
- People: People are mobile agents;
- Stations: Stations are static and meta-agents.
4.3. Determining the Relations of Agents
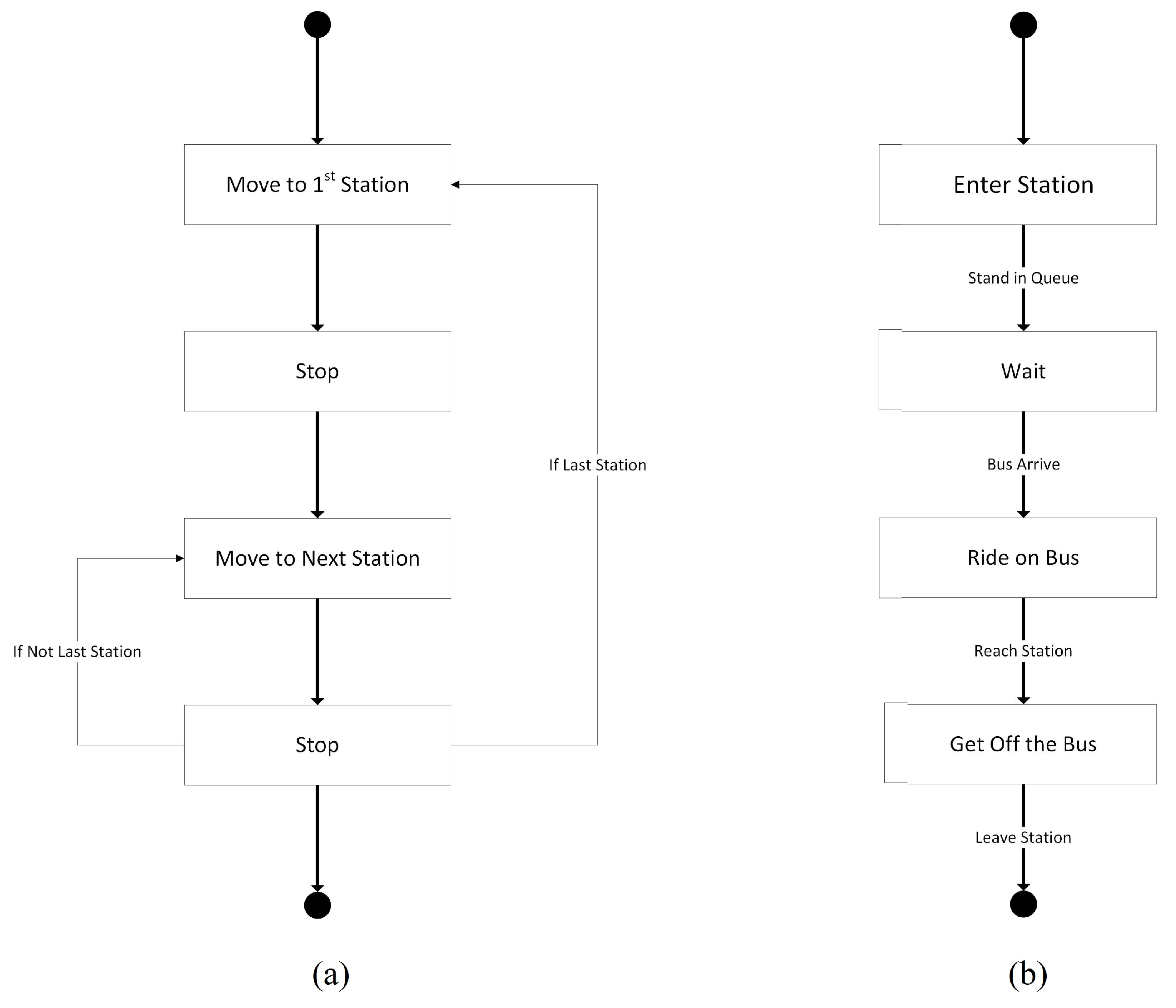
4.4. Formalization of Processes
4.5. Formalization of Messages
4.6. Formation of Rules
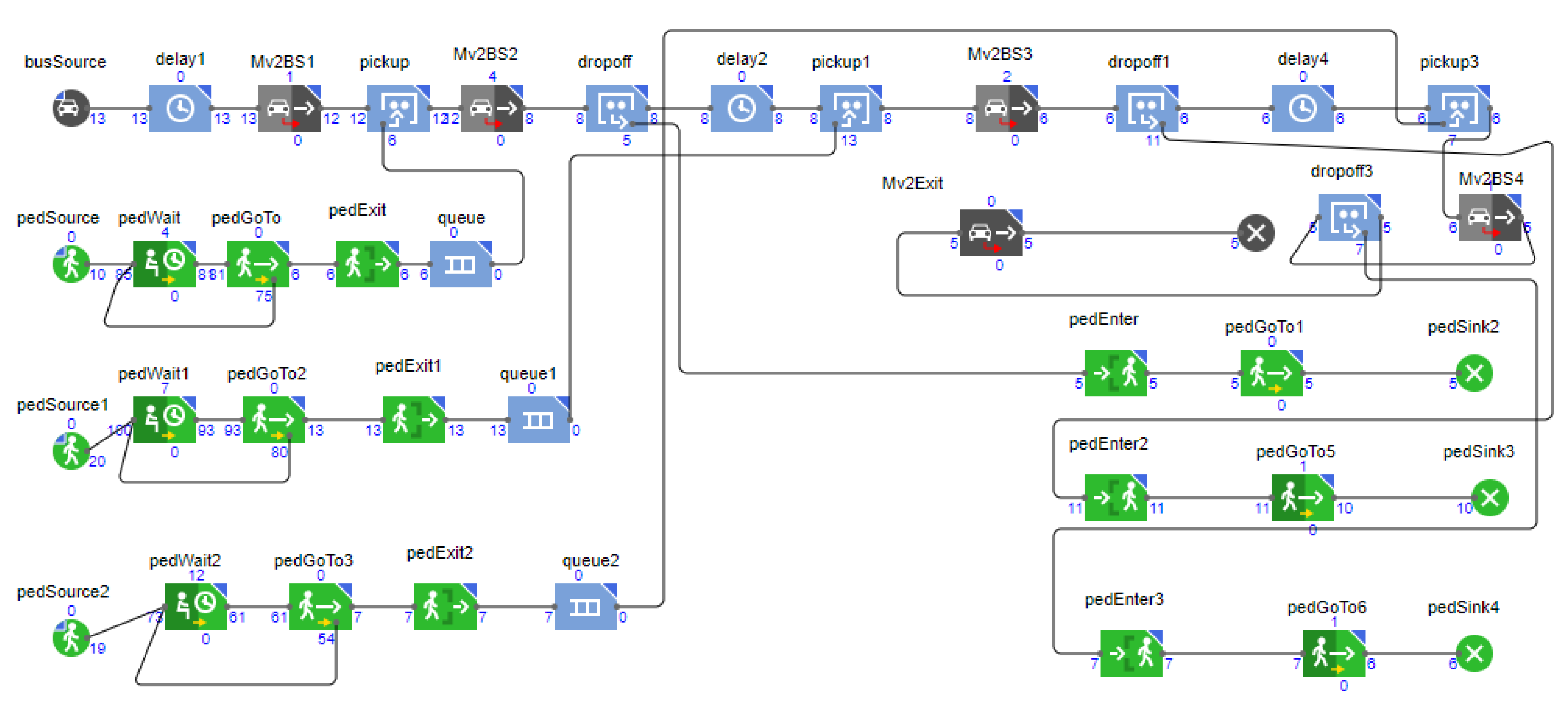
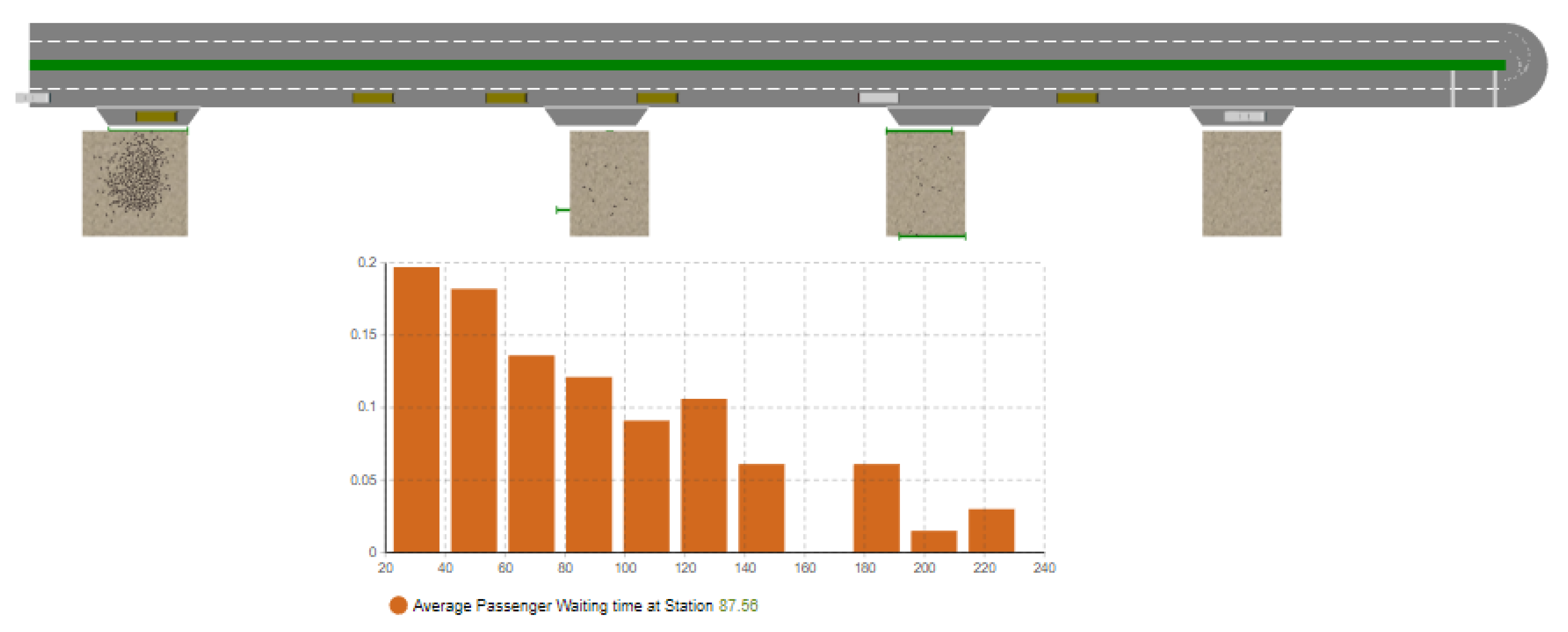
4.7. Simulation
5. Discussion and Analysis
5.1. Problem in Modeling Agent-Based Ambient-Oriented Systems
5.2. Our Framework for Modeling Agent-Based Ambient-Oriented Systems
5.3. Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stoyanov, S.; Glushkova, T.; Popchev, I. Modeling of Intelligent Context Aware Systems. Eng. Sci. Bulg. 2017, 3, 5–21. [Google Scholar]
- Niazi, M.A.K. Towards A Novel Unified Framework for Developing Formal Network and Validated Agent Based Simulation Models of Complex Adaptive Systems. Ph.D. Thesis, Computing Science and Mathematics School of Natural Sciences, University of Stirling, Scotland, UK, 2011. [Google Scholar]
- Bonabeau, E. Agent based modeling Methods and techniques for simulating human systems. Proc. Natl. Acad. Sci. USA 2002, 99, 7280–7287. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cruz, N.A.G.; Saa, I.L.; Hurtado, F.F.O. Agent based simulation in management and ororganization studies a survey. Eur. J. Manag. Bus. Econ. 2017, 26, 313–328. [Google Scholar] [CrossRef] [Green Version]
- Glushkova, T.; Stoyanov, S.; Popchev, I.; Doukovska, L. Ambient Oriented modeling in an Intelligent Agriculture Infrastructure. In Proceedings of the IEEE 10th International Conference on Intelligent Systems, Varna, Bulgaria, 28–30 August 2020. [Google Scholar]
- Glushkova, T.; Stoyanov, S.; Doycheva, A.S.; Ivanova, V.; Doukovska, L. AMBIENT An Environment For Ambient Oriented Modeling. Int. J. Comput. 2019, 18, 331–340. [Google Scholar] [CrossRef]
- Ding, H.; Guoqiang, Y.; Yuan, M. Study of Bus Rapid Transit System Evaluation Based on Gray Extension Matterelement Model. In Proceedings of the Fourth International Conference on Intelligent Computation Technology and Automation, Shenzhen, China, 28–29 March 2011. [Google Scholar]
- Dong, X.S.; Xiong, G.; Fan, D.; Zhu, F.H.; Xie, L. Bus Rapid transit BRT Parallel System Based on ACP Approach. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012. [Google Scholar]
- Racehorse, V.J.; Zhang, G.; Sussman, A.; Jian, A.; Parker, T. Bus rapid transit system deployment for high quality and cost effective transit service a comprehensive review and comparative analysis. IET Intell. Transp. Syst. 2015, 9, 175–183. [Google Scholar] [CrossRef]
- Papageorgiou, G.; Maimaris, A.; Ioannou, P. Analysis and Evaluation of Intelligent Bus Rapid Transit Systems in Cyprus. In Proceedings of the IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015. [Google Scholar]
- Currie, G. The Demand Performance of Bus Rapid Transit. J. Public Transp. 2005, 8, 41–55. [Google Scholar] [CrossRef] [Green Version]
- Xie, Q.; Ma, S.; Jia, N.; Gao, Y. Agent Based Modeling and Simulation for the Bus Corridor Problem in a Many to One Mass Transit System. Discret. Dyn. Nat. Soc. 2014, 2014, 652869. [Google Scholar] [CrossRef] [Green Version]
- Abbasi, K.M.; Khan, T.A.; ul Haq, I. Hierarchical Modeling of Complex Internet of Things Systems Using Conceptual Modeling Approaches. IEEE Access 2019, 7, 102772–102791. [Google Scholar] [CrossRef]
- Robinson, W.N.; Ding, Y. A Survey of Customization Support in Agent Based Business Process Simulation Tools. ACM Trans. Model. Comput. Simul. 2010, 20, 29. [Google Scholar] [CrossRef]
- Hawe, G.I.; Coates, G.; Wilson, D.T.; Crouch, R.S. Agent Based Simulation for Large-Scale Emergency Response A Survey of Usage and Implementation. ACM Comput. Surv. 2012, 45, 51. [Google Scholar] [CrossRef] [Green Version]
- Paravantis, J.A. From Game Theory to Complexity Science and Agent Based Modeling in World Politics; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Richiardi, M. The future of agent based modelling. East. Econ. J. 2017, 43, 24. [Google Scholar] [CrossRef]
- Bruno, G.; Genovese, A.; Sgalambro, A. An Agent Based framework for modeling and solving location problems. Soc. Estad. E Investig. Oper. 2010, 18, 81–96. [Google Scholar] [CrossRef] [Green Version]
- Vasanthapriyan, S.; Thuseethan, S. Prediction of Human Flow in Disaster Situations A Multi Agent Based Modelling and Simulation. In Proceedings of the 2nd International Symposium on Dependable Computing and Internet of Things, Wuhan, China, 16–18 November 2015. [Google Scholar]
- Raees, M.; Khan, T.A.; Abbasi, K.M.; Ahmed, A.; Fazilat, S.; Ahmed, I. Context Aware Services Using MANETs for Long Distance Vehicular Systems A Cognitive Agent-Based Model. Sci. Program. 2021, 2021, 12. [Google Scholar] [CrossRef]
- Glushkova, T.; Stoyanov, S.; Popchev, I.; Cheresharov, S. Ambient Oriented Modelling in a Virtual Educational Space. Compt. Rend. Acad. Bulg. Sci. 2018, 71, 398–406. [Google Scholar]
- Glushkova, T.; Stoyanov, S. Ambient Oriented Modeling Of Intelligent Context Aware Systems. Bulg. Comput. Sci. Commun. 2018, 7, 53–61. [Google Scholar]
- Sehili, S.; Capocchi, L.; Santucci, J.F.; Lavirotte, S.; Tigli, J.Y. Discrete Event Modeling and Simulation for IoT Efficient Design Combining WComp and DEVSimPy Framework. In Proceedings of the 5th International Conference on Simulation and Modeling Methodologies Technologies and Applications, Colmar, France, 21–23 July 2015. [Google Scholar]
- Stoyanov, S.; Glushkova, T.; Doycheva, A.S.; Ivanova, V. A Reference Architecture Supporting Smart City Applications. In Lecture Notes in Business Information Processing, Proceedings of the in International Conference on Business Information Systems, Seville, Spain, 26–28 June 2019; Springer: Cham, Switzerland, 2019; pp. 463–474. [Google Scholar]
- Iyigunlu, S.; Fookes, C.; Yarlagadda, P. Agent-based modelling of aircraft boarding methods. In Proceedings of the 4th IEEE International Conference on Simulation And Modeling Methodologies Technologies and Applications SIMULTECH, Vienna, Austria, 28–30 August 2014; pp. 148–154. [Google Scholar]
- Molina, M.; Carrasco, S.; Martin, J. Agent based modeling and simulation for the design of the future european air traffic management system The experience of cassiopeia. In Communications in Computer and Information Science, Proceedings of the International Conference on Practical Applications of Agents and Multi Agent Systems, Salamanca, Spain, 4–6 June 2014; Springer: Cham, Switzerland, 2014; pp. 22–33. [Google Scholar]
- Bongiorno, C.; Micciche, S.; Mantegna, R.N. An empirically grounded agent based model for modeling directs, conflict detection and resolution operations in air traffic management. PLoS ONE 2017, 12, e0175036. [Google Scholar] [CrossRef] [Green Version]
- Delcea, C.; Cotfas, L.A.; Paun, R. Agent based evaluation of the airplane boarding strategies efficiency and sustainability. Sustainability 2018, 10, 1879. [Google Scholar] [CrossRef] [Green Version]
- Grether, D.; Furbas, S.; Nagel, K. Agent-based modelling and simulation of air transport technology. Procedia Comput. Sci. 2013, 19, 821–828. [Google Scholar] [CrossRef] [Green Version]
- Sheppard, C.J.; Harris, A.; Gopal, A.R. Cost effective siting of electric vehicle charging infrastructure with agent based modeling. IEEE Trans. Transp. Electrif. 2016, 2, 174–189. [Google Scholar] [CrossRef]
- Yang, W.; Xiang, Y.; Liu, J.; Gu, C. Agent based modeling for scale evolution of plug in electric vehicles and charging demand. IEEE Trans. Power Syst. 2017, 33, 1915–1925. [Google Scholar] [CrossRef]
- Bischoff, J.; Fernandez, F.J.M.; Olavarria, G.D.; Maciejewski, M.; Nagel, K. Impacts of vehicle fleet electrification in Sweden a simulation based assessment of long distance trips. In Proceedings of the 6th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems MTITS, Cracow, Poland, 5–7 June 2019; pp. 1–7. [Google Scholar]
- Adepetu, A.; Keshav, S.; Arya, V. An agent based electric vehicle ecosystem model San Francisco case study. Transp. Policy 2016, 46, 109–122. [Google Scholar] [CrossRef]
- Hu, J.; Morais, H.; Lind, M.; Bindner, H.W. Multi agent based modeling for electric vehicle integration in a distribution network operation. Electr. Power Syst. Res. 2016, 136, 341–351. [Google Scholar] [CrossRef] [Green Version]
- Pagani, M.; Korosec, W.; Chokani, N.; Abhari, R.S. User behaviour and electric vehicle charging infrastructure An agent based model assessment. Appl. Energy 2019, 254, 113680. [Google Scholar] [CrossRef]
- Silvia, C.; Krause, R.M. Assessing the impact of policy interventions on the adoption of plug in electric vehicles An agent based model. Energy Policy 2016, 96, 105–118. [Google Scholar] [CrossRef]
- Wolf, I.; Schröder, T.; Neumann, J.; de Haan, G. Changing minds about electric cars: An empirically grounded agent-based modeling approach. Technol. Forecast. Soc. Chang. 2015, 94, 269–285. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Kockelman, K.M.; Boesch, P.M.; Ciari, F. Tracking a system of shared autonomous vehicles across the Austin, Texas network using agent-based simulation. Transportation 2017, 44, 1261–1278. [Google Scholar] [CrossRef]
- Dalapati, P.; Padhy, A.; Mishra, B.; Dutta, A.; Bhattacharya, S. Real time collision handling in railway transport network an agent based modeling and simulation approach. Transp. Lett. 2019, 11, 458–468. [Google Scholar] [CrossRef]
- Zou, Q.; Fernandes, D.S.; Chen, S. Agent based evacuation simulation from subway train and platform. J. Transp. Saf. Secur. 2019, 13, 318–339. [Google Scholar] [CrossRef]
- Wibowo, S.S.; Olszewski, P. Modeling Walking Accessibility To Public Transport Terminals Case Study Of Singapore Mass Rapid Transit. J. East. Asia Soc. Transp. Stud. 2005, 6, 147–156. [Google Scholar]
- Warren, J.P.; Ortegon-Sanchez, A. Designing and modeling Havanas future bus rapid transit. Urban Des. Plan. 2015, 169, 104–119. [Google Scholar]
- Wu, J.; Song, R.; Wang, Y.; Chen, F.; Li, S. Modeling the Coordinated Operation between Bus Rapid Transit and Bus. Math. Probl. Eng. 2015, 2015, 7. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.; Yang, X. A Passive Transit Signal Priority Approach for Bus Rapid Transit System. In Proceedings of the 2007 IEEE Intelligent Transportation Systems Conference, Bellevue, WA, USA, 30 September–3 October 2007. [Google Scholar]
- Georgoudas, I.G.; Sirakoulis, G.C. An Anticipative Crowd Management System Preventing Clogging in Exits During Pedestrian Evacuation Processes. IEEE Syst. J. 2011, 5, 129–141. [Google Scholar] [CrossRef]
- Wang, N.; Chen, Y.; Zhang, L. Design of Multi agent based Distributed Scheduling System for Bus Rapid Transit. In Proceedings of the IEEE Third International Conference on Intelligent Human Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2011. [Google Scholar]
- Odell, J.; Parunak, H.V.D.; Fleischer, M. Modeling agents and their environment The communication environment. J. Object Technol. 2003, 2, 39–52. [Google Scholar] [CrossRef] [Green Version]
- Chelberg, D.; Welch, L.; Lakshmikumar, A.; Gillen, M.; Zhou, Q. Meta Reasoning For a Distributed Agent Architecture. In Proceedings of the IEEE 33rd Southeastern Symposium on System Theory, Athens, OH, USA, 20–20 March 2001; pp. 377–381. [Google Scholar]
- Auchincloss, A.H.; Garcia, L.M.T. Brief introductory guide to agent based modeling and an illustration from urban health research. Cad. Saude Publica 2015, 31, 65–78. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Borgdorff, J.; Mamonski, M.; Bosak, B.; Groen, D.; Belgacem, M.B.; Kurowski, K.; Hoekstra, A.G. Multiscale computing with the multiscale modeling library and runtime environment. Procedia Comput. Sci. 2013, 18, 1097–1105. [Google Scholar] [CrossRef]
- Raabe, D.; Scheffler, M.; Kremer, K.; Thiel, W.; Neugebauer, J.; Jansen, M. Multi Scale Modeling in Materials Science and Engineering, Technical Report. 2009.
- Hoekstra, A.; Chopard, B.; Coveney, P. Multiscale modelling and simulation a position paper. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2014, 372. [Google Scholar] [CrossRef] [PubMed]
- Groen, D.; Knap, J.; Neumann, P.; Suleimenova, D.; Veen, L.; Leiter, K. Mastering the scales a survey on the benefits of multiscale computing software. Philos. Trans. R. Soc. A 2019, 377, 20180147. [Google Scholar] [CrossRef] [Green Version]
- Verkhovtsev, A.V.; Solovyov, I.A.; Solovyov, A.V. Advances in multiscale modeling for novel and emerging technologies. Eur. Phys. J. D 2021, 75, 1–18. [Google Scholar] [CrossRef]
- Borshchev, A.; Filippov, A. From System Dynamics and Discrete Event to Practical Agent Based Modeling Reasons Techniques Tools. In Proceedings of the 22nd International Conference of the System Dynamics Society, Oxford, UK, 25–29 July 2004. [Google Scholar]
- Majid, M.A.; Fakhreldin, M.; Zuhairi, K.Z. Comparing Discrete Event and Agent Based Simulation in Modelling Human Behaviour at Airport Check in Counter. In Lecture Notes in Computer Science, Proceedings of the International Conference on Human-Computer Interaction, Toronto, ON, Canada, 17–22 July 2016; Springer: Cham, Switzerland, 2016; pp. 510–522. [Google Scholar]
- Metzner, N. A comparison of agent based and discrete event simulation for assessing airport terminal resilience. Transp. Res. Procedia 2019, 43, 209–218. [Google Scholar] [CrossRef]
- Maidstone, R. Discrete Event Simulation System Dynamics and Agent Based Simulation Discussion and Comparison. System 2012, 1, 1–6. [Google Scholar]
- Dubiel, B.; Tsimhoni, O. Integrating Agent Based Modeling Into A Discrete Event Simulation. In Proceedings of the Winter Simulation Conference, Orlando, FL, USA, 4 December 2005. [Google Scholar]
- Franceschini, R.; Mierlo, S.V.; Vangheluwe, H. Towards adaptive abstraction in agent based simulation. In Proceedings of the 2019 Winter Simulation Conference, National Harbor, MD, USA, 8–11 December 2019. [Google Scholar]
- Federici, M.L.; Redaelli, S.; Vizzari, G. Models abstractins and phases in multi agent based simulation. Proceedings of the WOA, 2006. [Google Scholar]
- Zhou, L.; Lin, J.; Li, Y.; Zhang, Z. Innovation Diffusion of Mobile Applications in Social Networks A Multi-Agent System. Sustainability 2020, 12, 2884. [Google Scholar] [CrossRef] [Green Version]
- Ebrie, A.S.; Kim, Y.J. Investigating Market Diffusion of Electric Vehicles with Experimental Design of Agent Based Modeling Simulation. Systems 2022, 10, 28. [Google Scholar] [CrossRef]
- Novizayanti, D.; Prasetio, E.A.; Siallagan, M.; Santosa, S.P. Agent Based Modeling Framework for Electric Vehicle Adoption Transition in Indonesia. World Electr. Veh. J. 2021, 12, 73. [Google Scholar] [CrossRef]
- Preis, L.; Hornung, M. Vertiport Operations Modeling Agent Based Simulation and Parameter Value Specification. Electronics 2022, 11, 1071. [Google Scholar] [CrossRef]
- Shaaban, M.; Scheffran, J.; Elsobki, M.S.; Azadi, H. A Comprehensive Evaluation of Electricity Planning Models in Egypt Optimization versus Agent-Based Approaches. Sustainability 2022, 14, 1563. [Google Scholar] [CrossRef]
- Siegfried, R.; Lehmann, A.; Khayari, R.E.A.; Kiesling, T. A reference model for agent based modeling and simulation. In Proceedings of the 2009 Spring Simulation Multiconference, San Diego, CA, USA, 22–27 March 2009; pp. 1–8. [Google Scholar]
- Derksen, C.; Branki, C.; Unland, R. A framework for agent based simulations of hybrid energy Infrastructures. In Proceedings of the Federated Conference on Computer Science and Information Systems, Wroclaw, Poland, 9–12 September 2012; pp. 1293–1299. [Google Scholar]
- Gonzalez, I.R.; Souza, G.E.D.; Ismailova, Z. Agent Based Modeling An Application to Natural Resource Mangement. J. Environ. Prot. 2018, 9, 991–1019. [Google Scholar] [CrossRef]
- Abar, S.; Theodoropoulos, G.K.; Lemarinier, P. Agent Based Modelling and Simulation tools A review of the state of art software. Comput. Sci. Rev. 2017, 24, 13–33. [Google Scholar] [CrossRef]
- Glushkova, T.; Miteva, M.; Doycheva, A.S.; Ivanova, V.; Stoyanov, S. Implementation of a Personal Internet of Thing Tourist Guide. Am. J. Comput. Commun. Control 2018, 5, 39–51. [Google Scholar]
- Helbing, D.; Balietti, S. Social Self Organization. In How to Do Agent Based Simulations in the Future from Modeling Social Mechanisms to Emergent Phenomena and Interactive Systems Design; Springer: Berlin/Heidelberg, Germany, 2013; pp. 25–70. [Google Scholar]
- Manzo, G. The Potential and Limitations of Agent based Simulation An Introduction. Rev. Fr. Sociol. 2014, 55, 433–462. [Google Scholar] [CrossRef]
- Cardelli, L.; Gordon, A.D. Mobile ambients. Theor. Comput. Sci. 2000, 240, 177–213. [Google Scholar] [CrossRef] [Green Version]
- Block, J. Hybrid agent based modeling HABM a framework for combining agent based modeling and simulation discrete event simulation and system dynamics. In Operations Research Proceedings, Proceedings of the 2017 Operations Research Proceedings 2017, Berlin, Germany, 6–8 September 2017; Springer: Cham, Switzerland, 2018; pp. 603–608. [Google Scholar]
- Crowder, R.M.; Robinson, M.A.; Hughes, H.P.N.; Sim, Y.W. The Development of an Agent Based Modeling Framework for Simulating Engineering Team Work. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 1425–1439. [Google Scholar] [CrossRef]
- Cavalcante, R.A.; Roordaa, M.J. Freight Market Interactions Simulation FREMIS An Agent Based Modeling Framework. Procedia Comput. Sci. 2013, 19, 867–873. [Google Scholar] [CrossRef] [Green Version]
- Masad, D.; Kazil, J. Mesa an agent based modeling framework. In Proceedings of the 14th Python in Science Conference, Austin, TX, USA, 6–12 July 2015. [Google Scholar]
- Foguelman, D.; Henning, P.; Uhrmacher, A.; Castro, R. Eb devs a formal framework for modeling and simulation of emergent behavior in dynamic complex systems. J. Comput. Sci. 2021, 53, 101387. [Google Scholar] [CrossRef]
- Jain, S.; McLean, C.R. An Integrating Framework for Modeling and Simulation for Incident Management. J. Homel. Secur. Emerg. Manag. 2006, 3, 1–24. [Google Scholar]
- Simonia, M.D.; Claudel, C.G. A simulation framework for modeling urban freight operations impacts on traffic networks. Simul. Model. Pract. Theory 2018, 86, 36–54. [Google Scholar] [CrossRef]
- Traore, M.K.; Zacharewicz, G.; Duboz, R.; Zeigler, B. Modeling and simulation framework for value based healthcare systems. Simul. Trans. Soc. Model. Simul. Int. 2019, 95, 481–497. [Google Scholar] [CrossRef] [Green Version]
- Cetinkaya, D.; Verbraeck, A.; Seck, M.D. MDD4MS A Model Driven Development Framework for Modeling and Simulation. In Proceedings of the Summer Computer Simulation Conference, Hague, The Netherlands, 27–30 June 2011; pp. 113–121. [Google Scholar]
- Abbasi, K.M.; Khan, T.A.; ul Haq, I. Modeling framework for model-based software engineering of complex Internet of things systems. Math. Biosci. Eng. 2021, 18, 9312–9335. [Google Scholar] [CrossRef]
- Auld, J.; Hope, M.; Ley, H.; Sokolov, V.; Xua, B.; Zhang, K. POLARIS Agent-based modeling framework development and implementation for integrated travel demand and network and operations simulations. Transp. Res. Part C Emerg. Technol. 2016, 64, 101–116. [Google Scholar] [CrossRef]
- Batool, K.; Niazi, M.A. Modeling the internet of things a hybrid modeling approach using complex networks and agent based models. Complex Adapt. Syst. Model. 2017, 5, 4. [Google Scholar] [CrossRef]
- Ge, M.; Kim, D.S. A Framework for Modeling and Assessing Security of the Internet of Things. In Proceedings of the IEEE 21st International Conference on Parallel and Distributed Systems, Melbourne, Australia, 14–17 December 2015; pp. 776–781. [Google Scholar]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbasi, K.M.; Khan, T.A.; Haq, I.u. Framework for Integrated Use of Agent-Based and Ambient-Oriented Modeling. Mathematics 2022, 10, 4157. https://doi.org/10.3390/math10214157
Abbasi KM, Khan TA, Haq Iu. Framework for Integrated Use of Agent-Based and Ambient-Oriented Modeling. Mathematics. 2022; 10(21):4157. https://doi.org/10.3390/math10214157
Chicago/Turabian StyleAbbasi, Khurrum Mustafa, Tamim Ahmed Khan, and Irfan ul Haq. 2022. "Framework for Integrated Use of Agent-Based and Ambient-Oriented Modeling" Mathematics 10, no. 21: 4157. https://doi.org/10.3390/math10214157