
Existence, Uniqueness and Stability Analysis with the Multiple Exp Function Method for NPDEs


Abstract
:1. Introduction
〈Suppose is a group and suppose is a metric group with the metric Given is there a s.t. if a mapping satisfies for each then there is a homomorphism with for all ?〉
〈Let , be a mapping between Banach spaces s.t. for all and some Then the limit exists for each and , is the single mapping s.t. for each
〈Suppose is a mapping among Banach spaces. If B satisfies , foe each and some and then there is a unique mapping s.t. for any
2. Applying Cadariu–Radu Method
- the fixed point of Θ is the convergence point of the sequence ;
- in the set , is the single fixed point of Θ;
- for every .
2.1. Stability Result for (1)
2.2. Stability Result for (1)
3. Applying MEFM
3.1. The Algorithm of MEFM
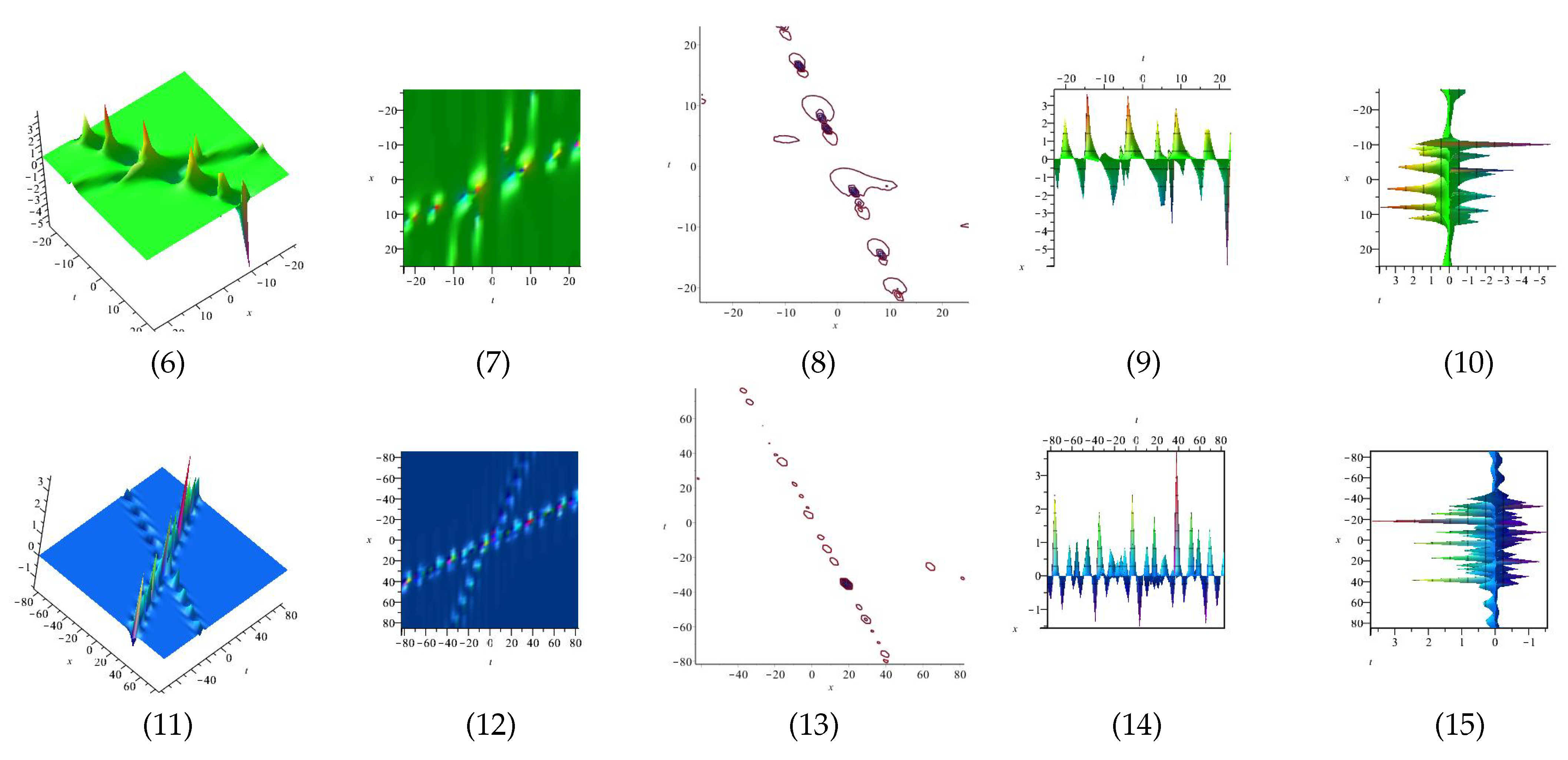
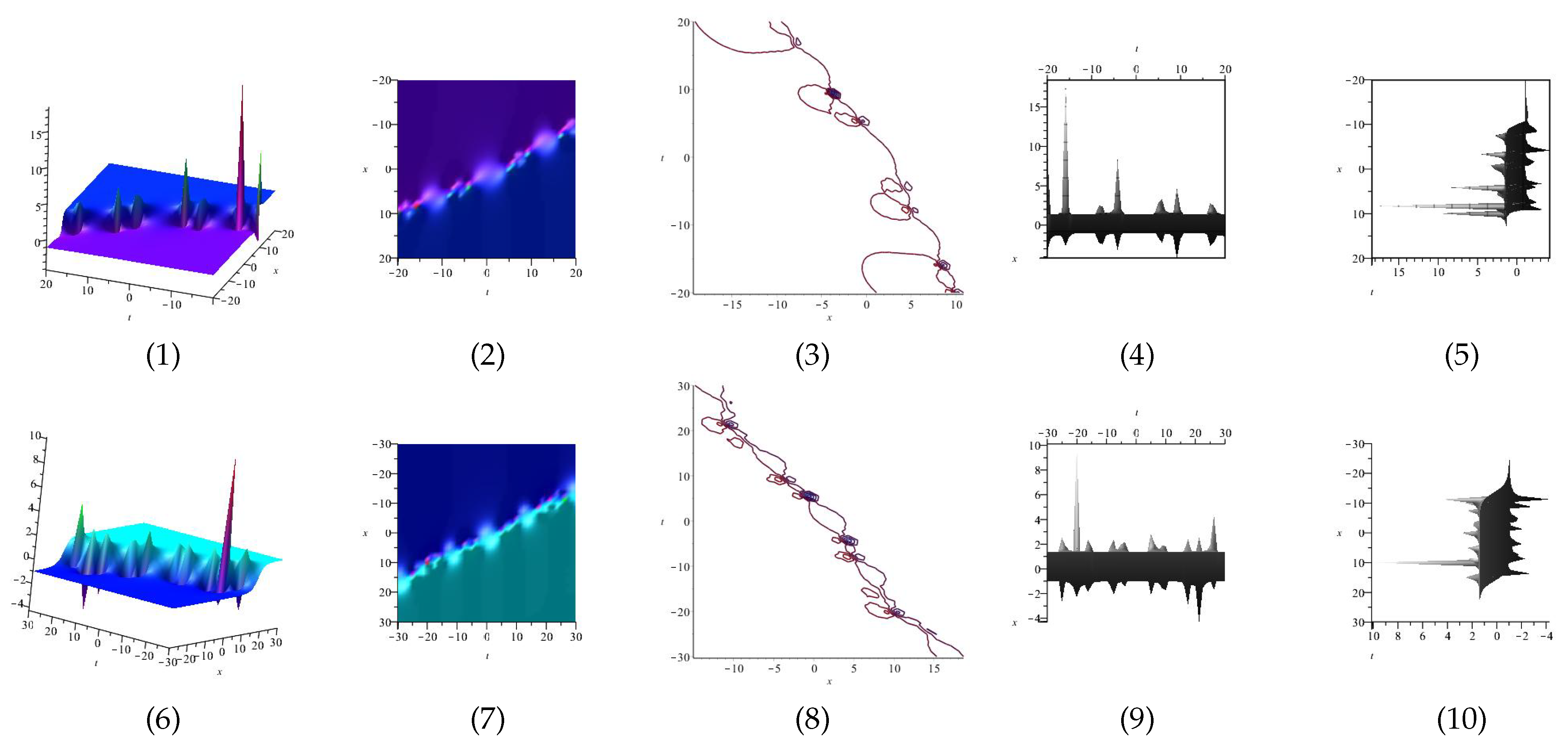
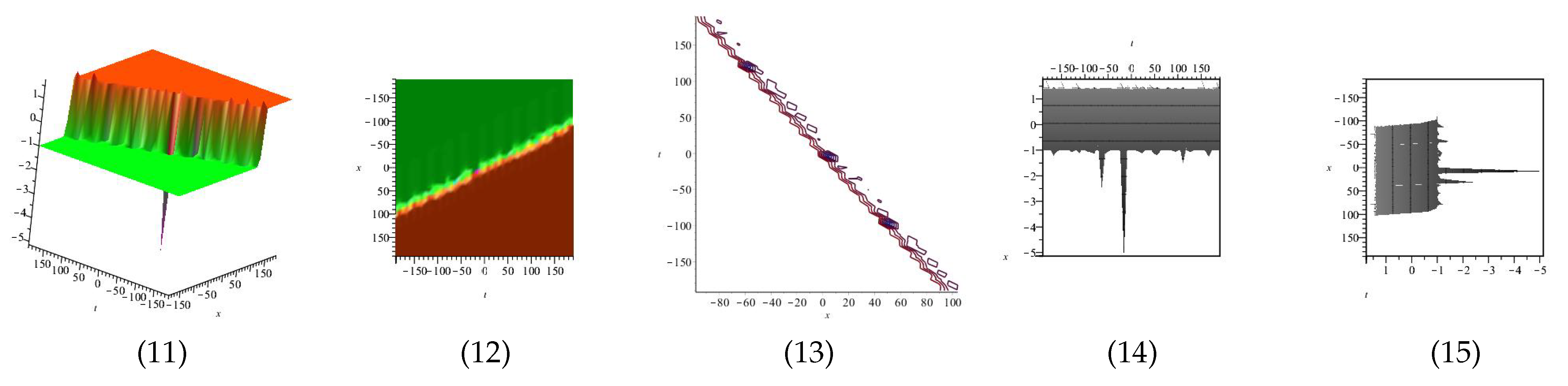
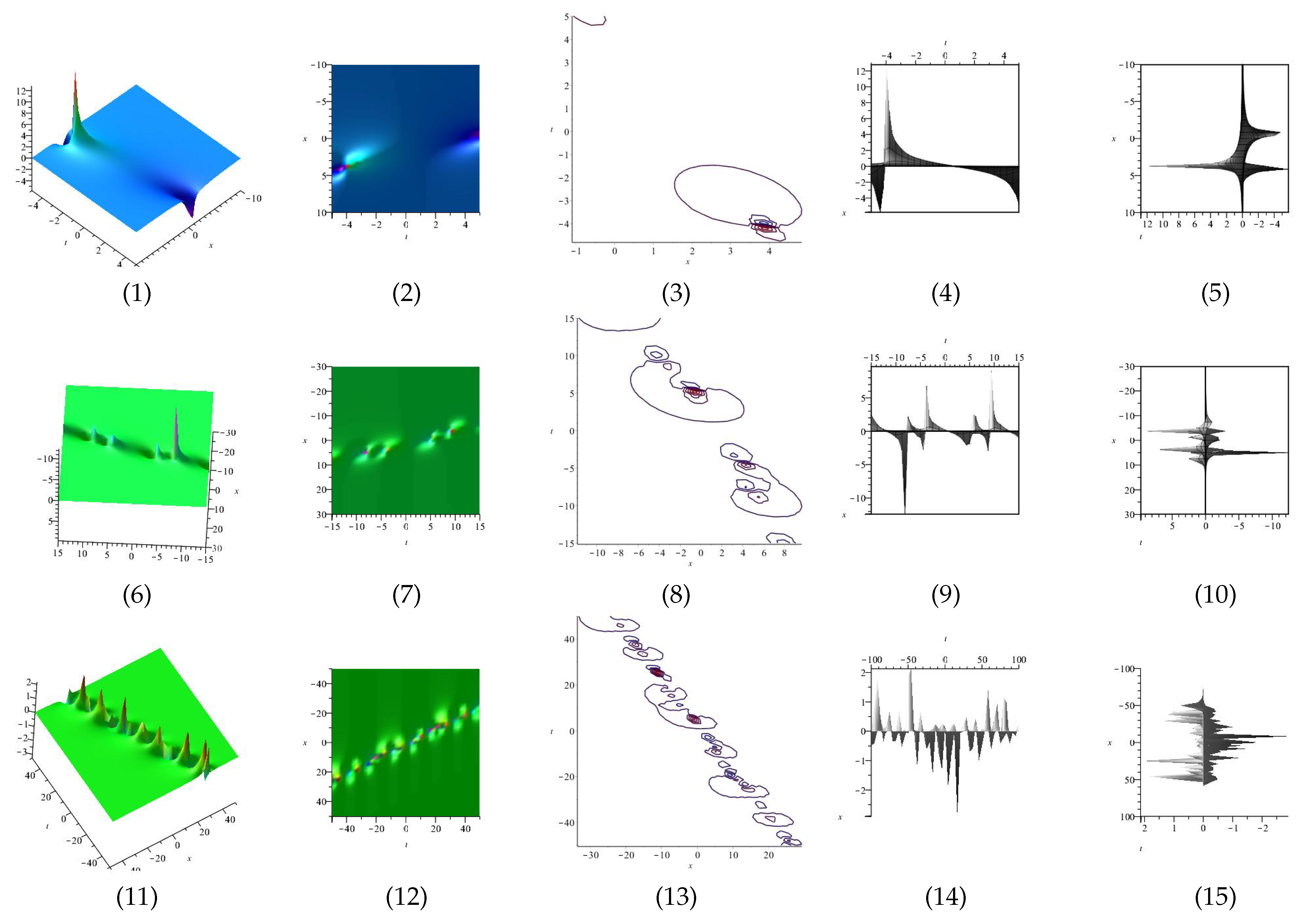
3.2. Application
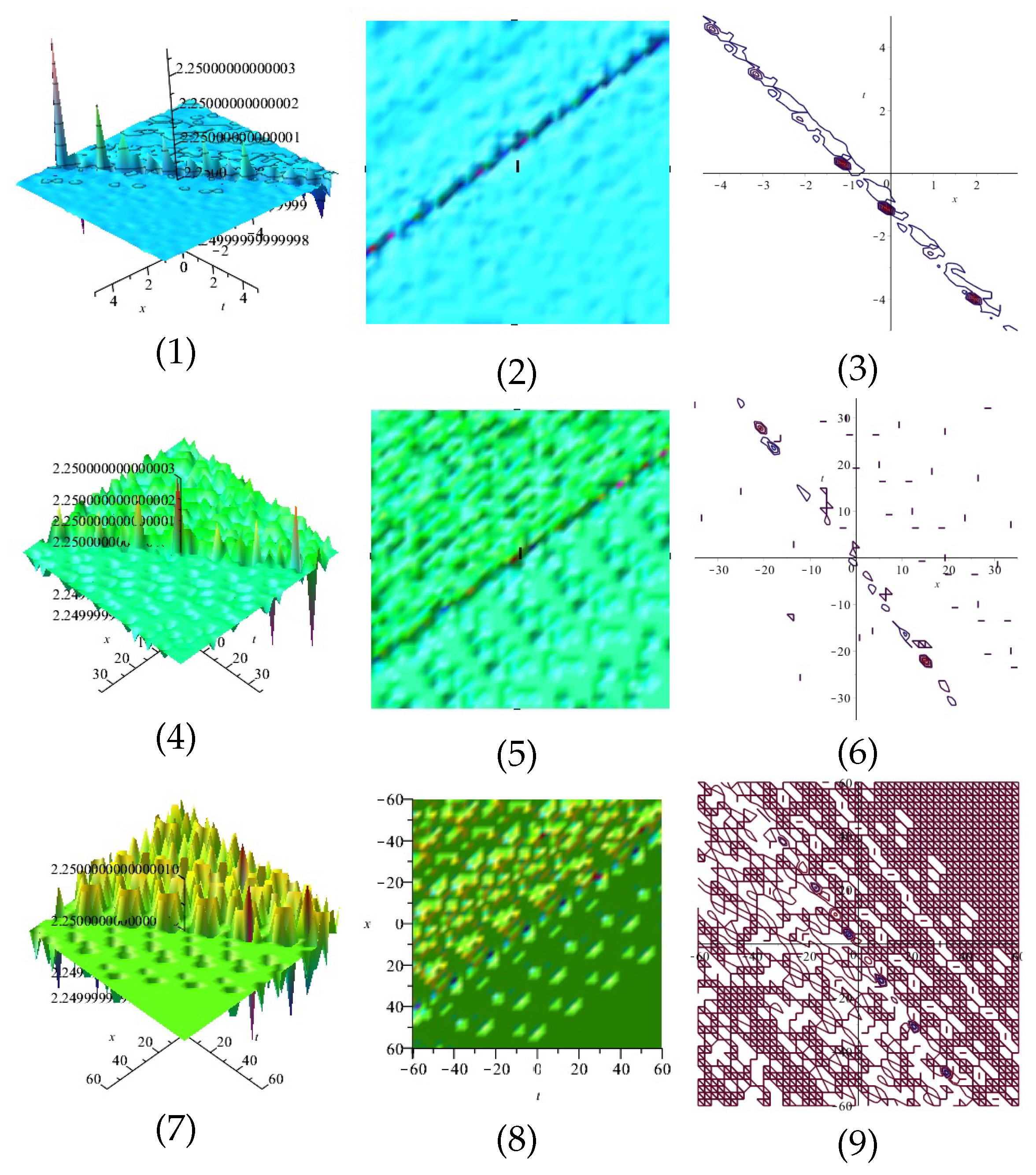
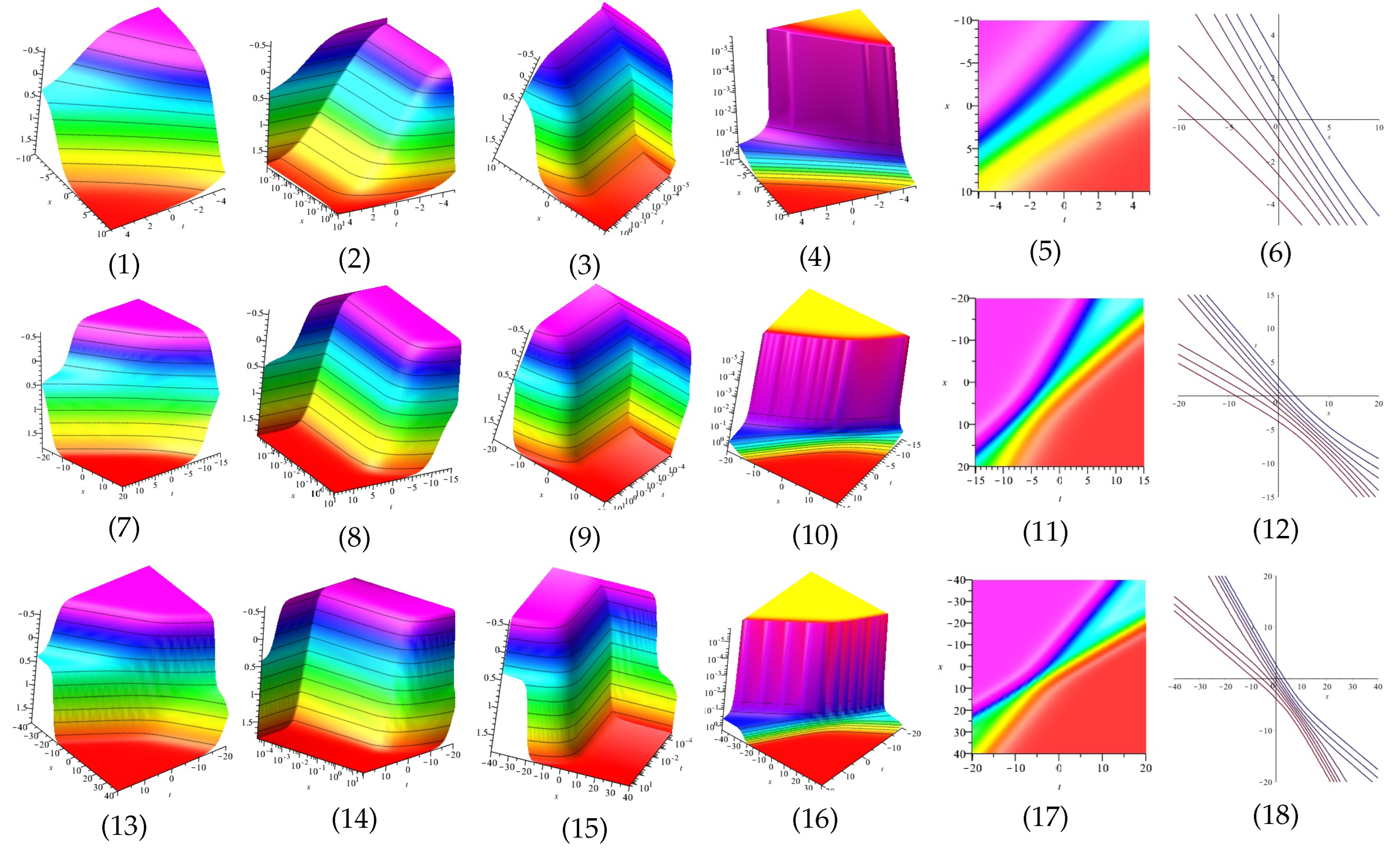
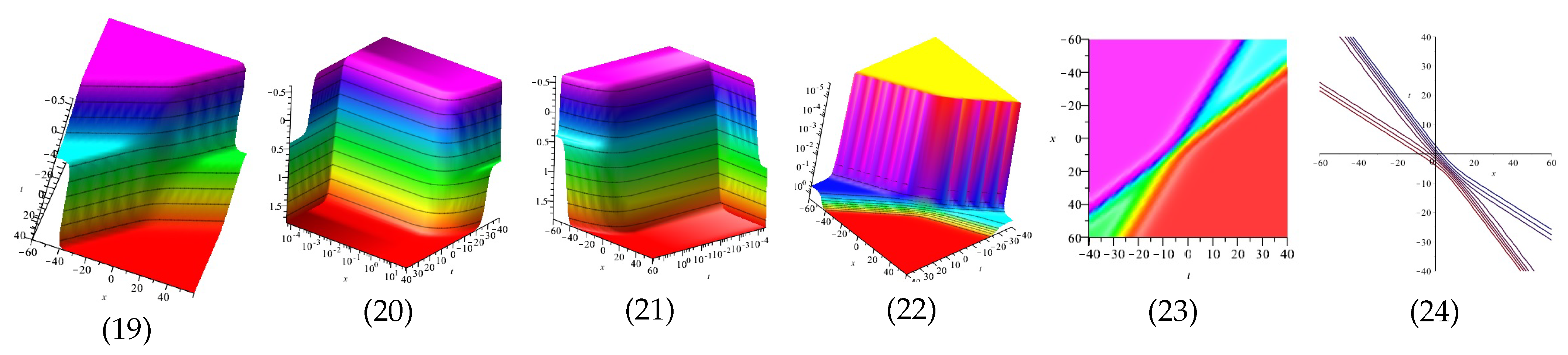
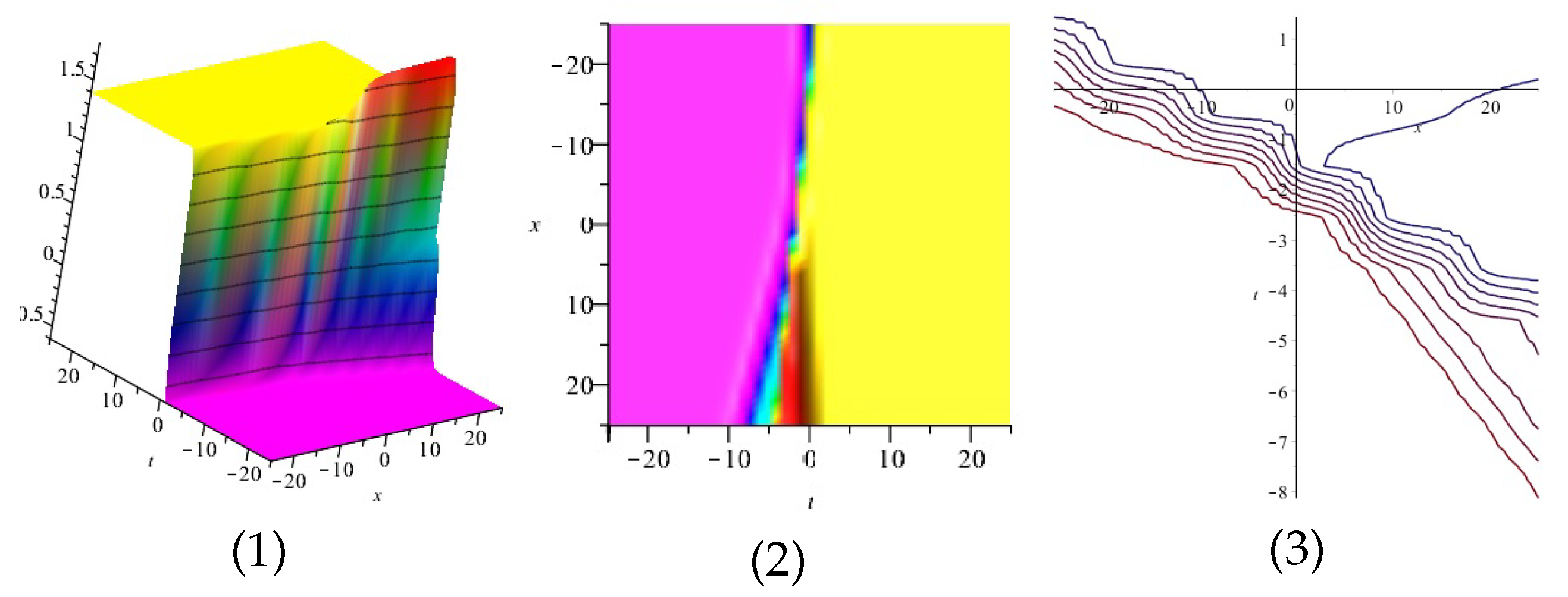
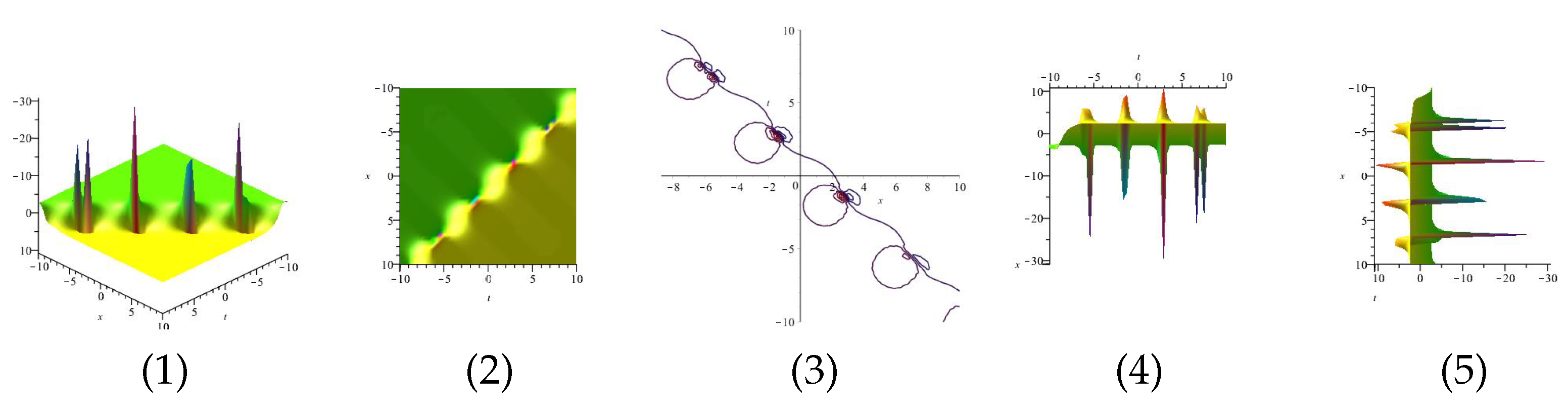
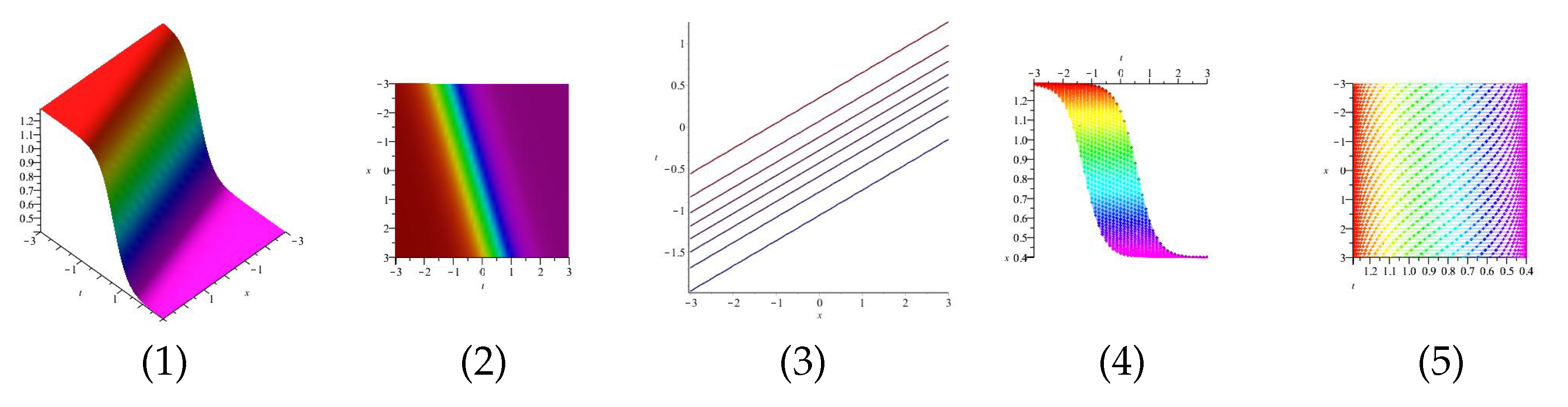
3.2.1. Example 1
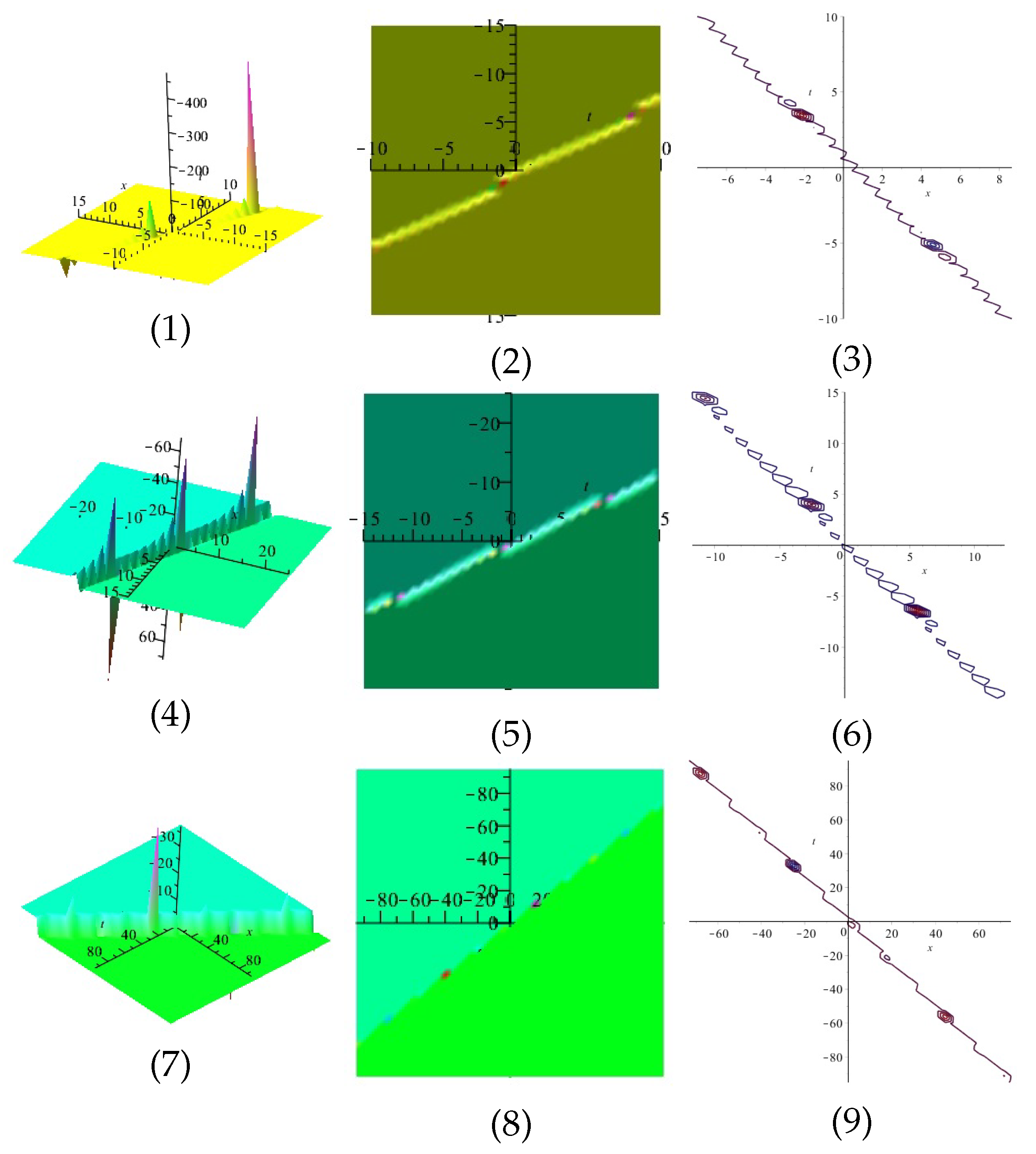
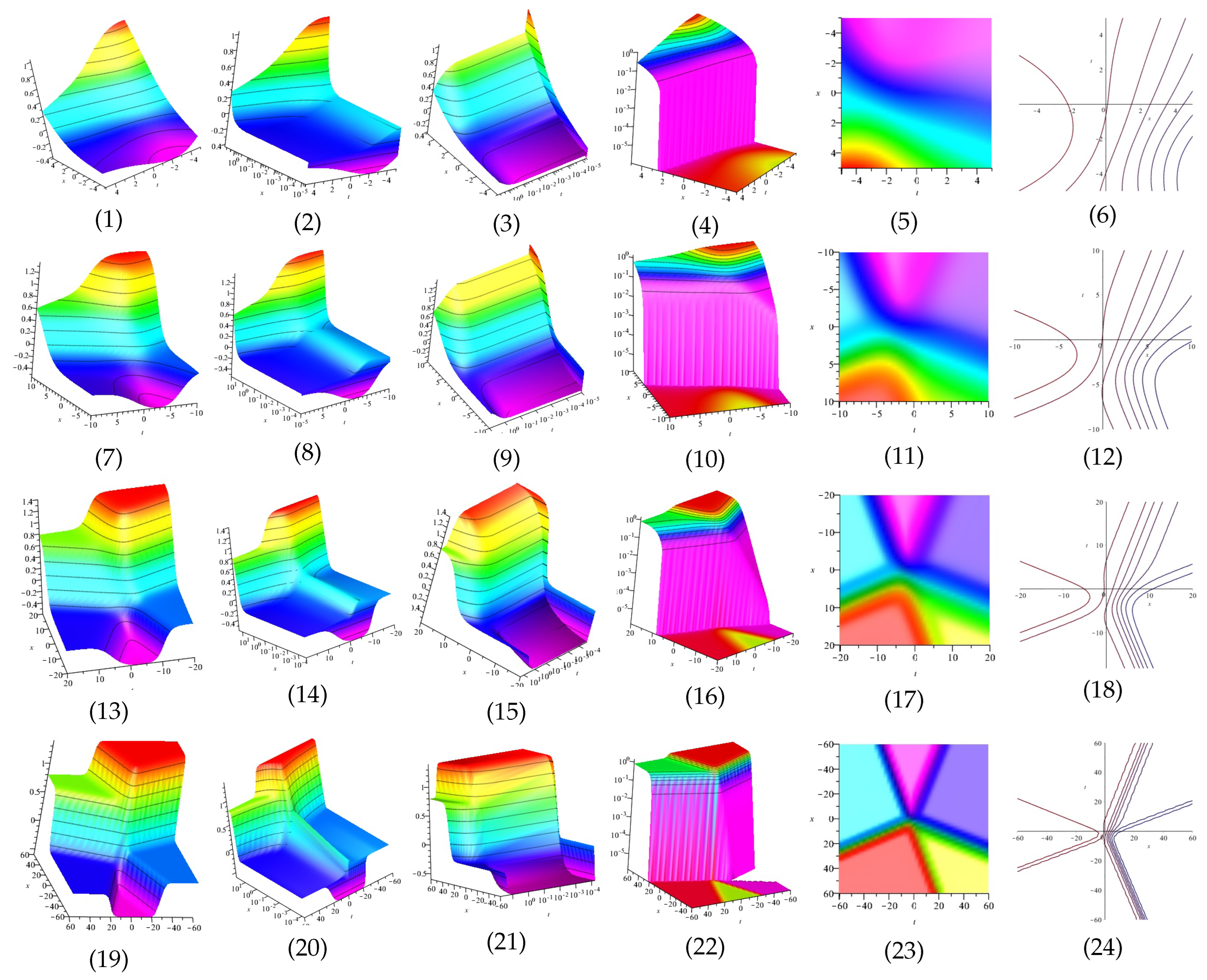
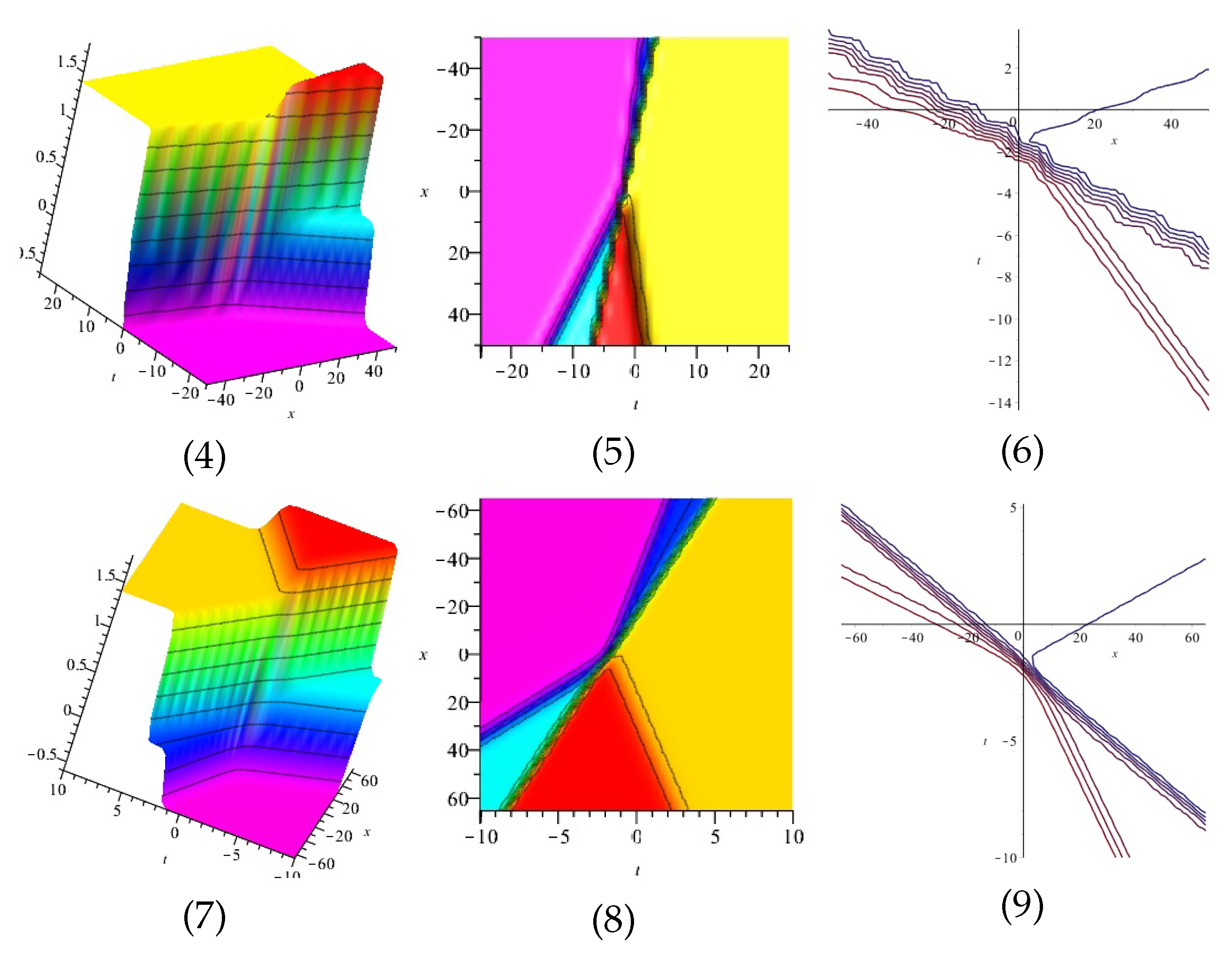
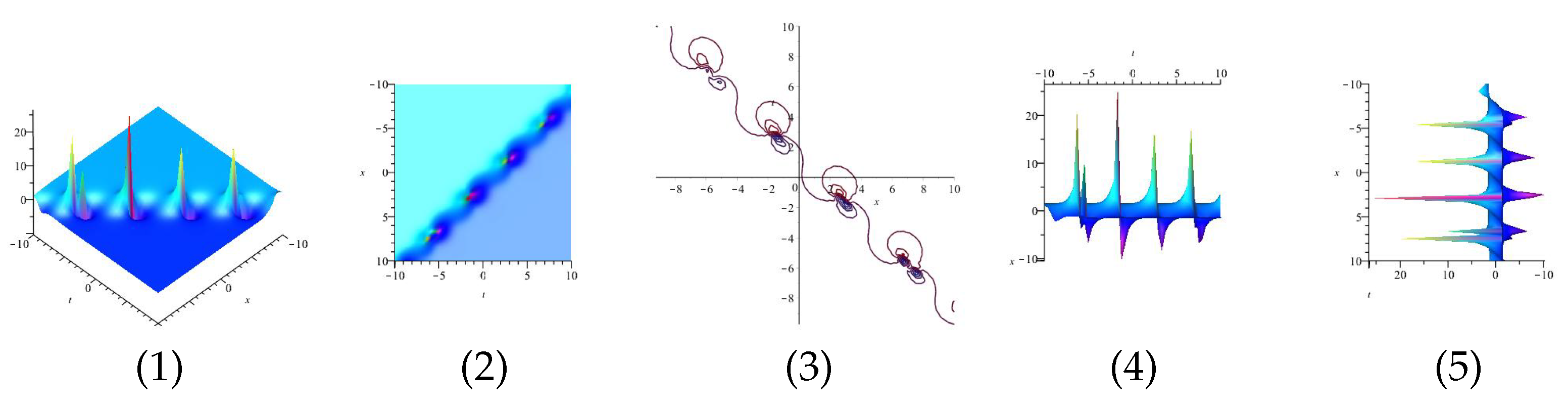
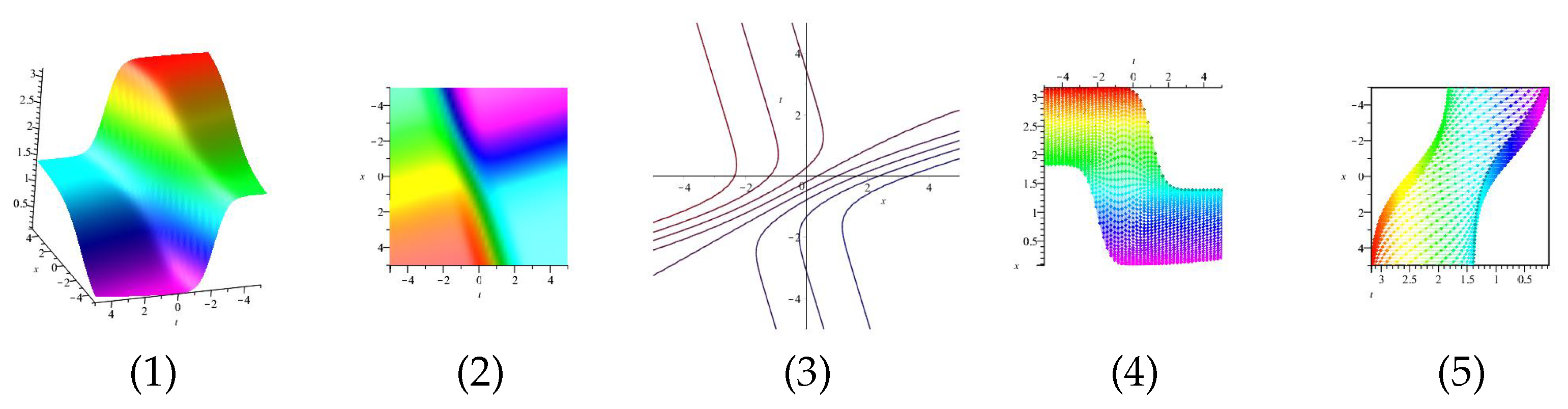
3.2.2. Example 2
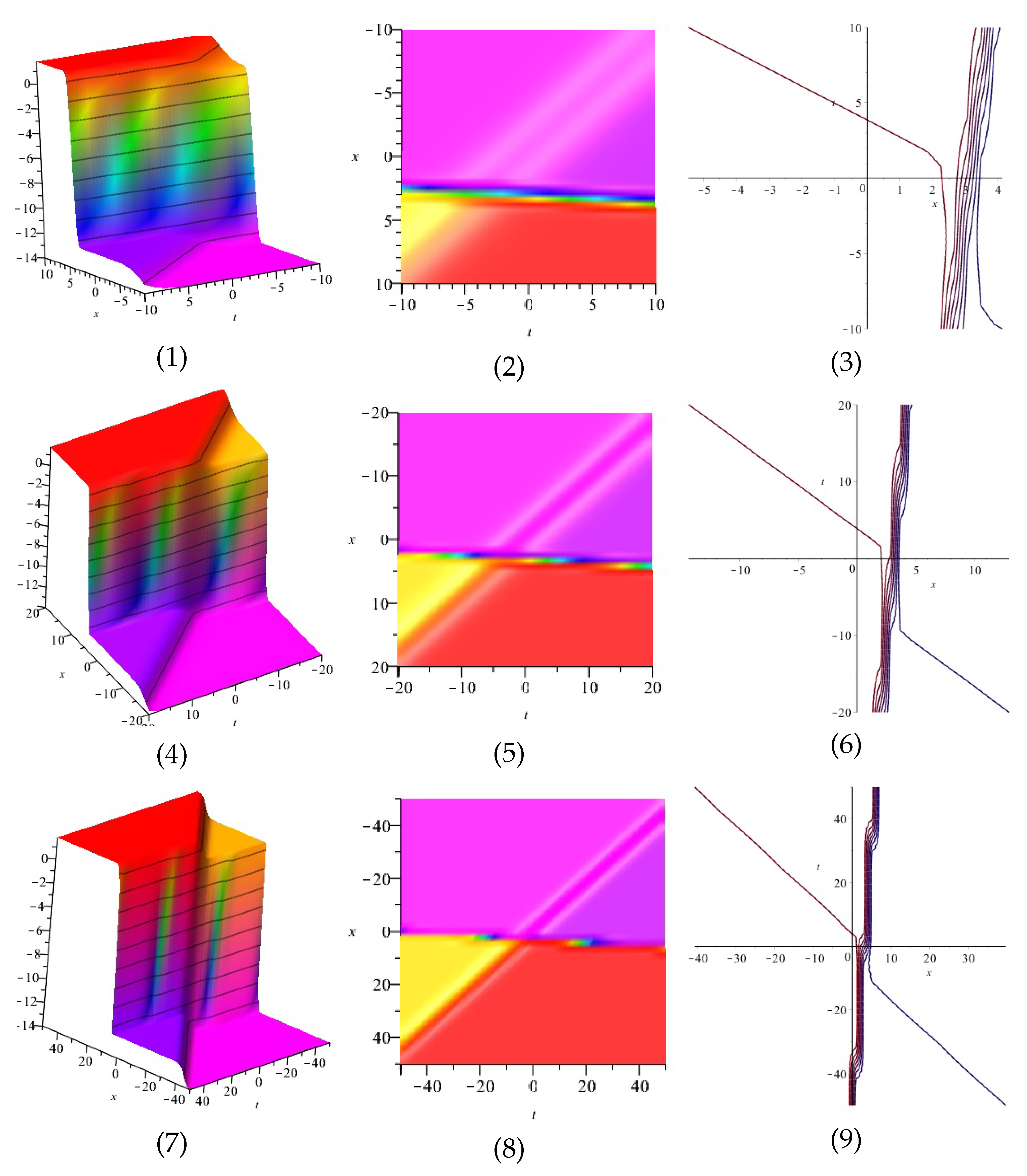
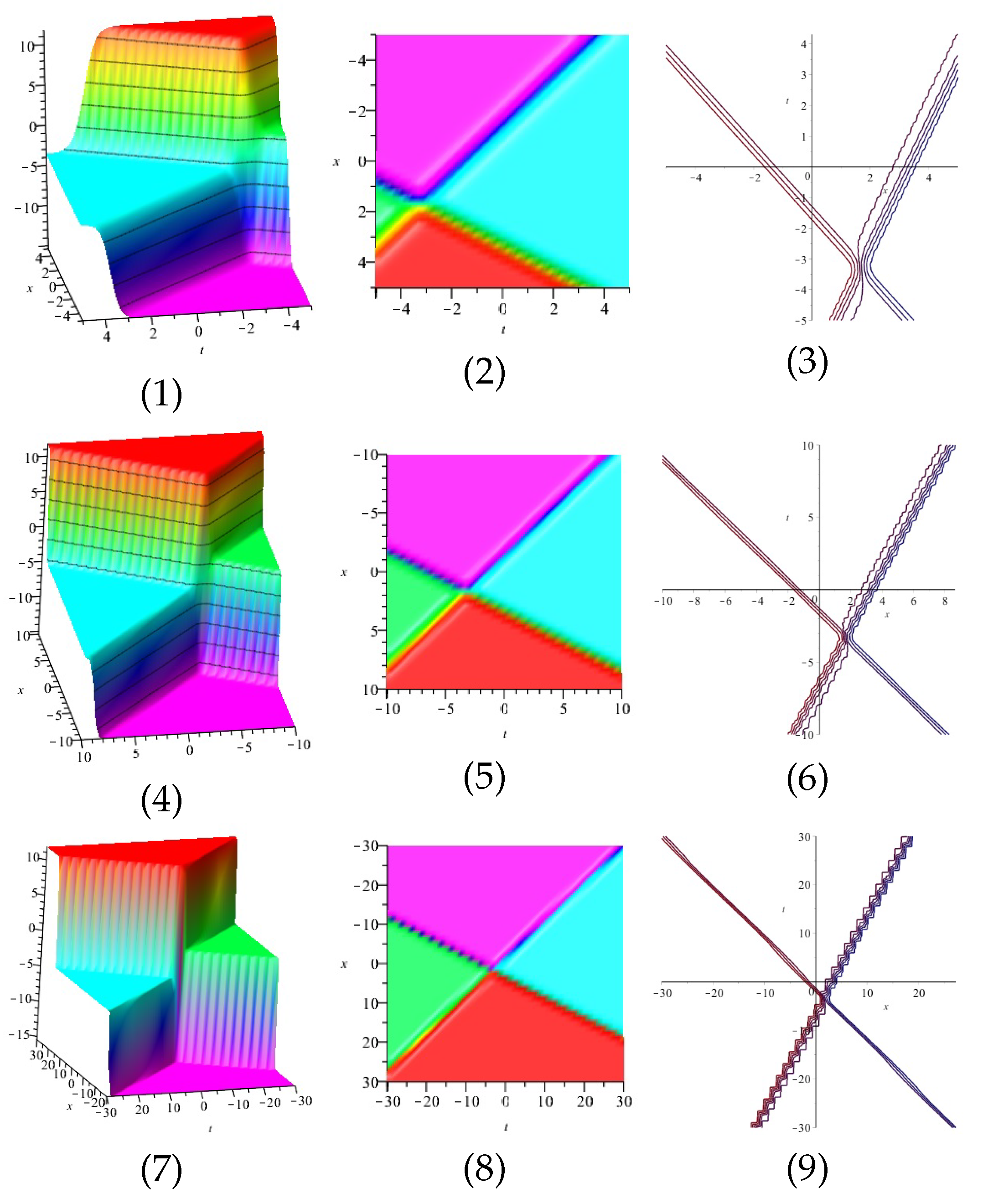
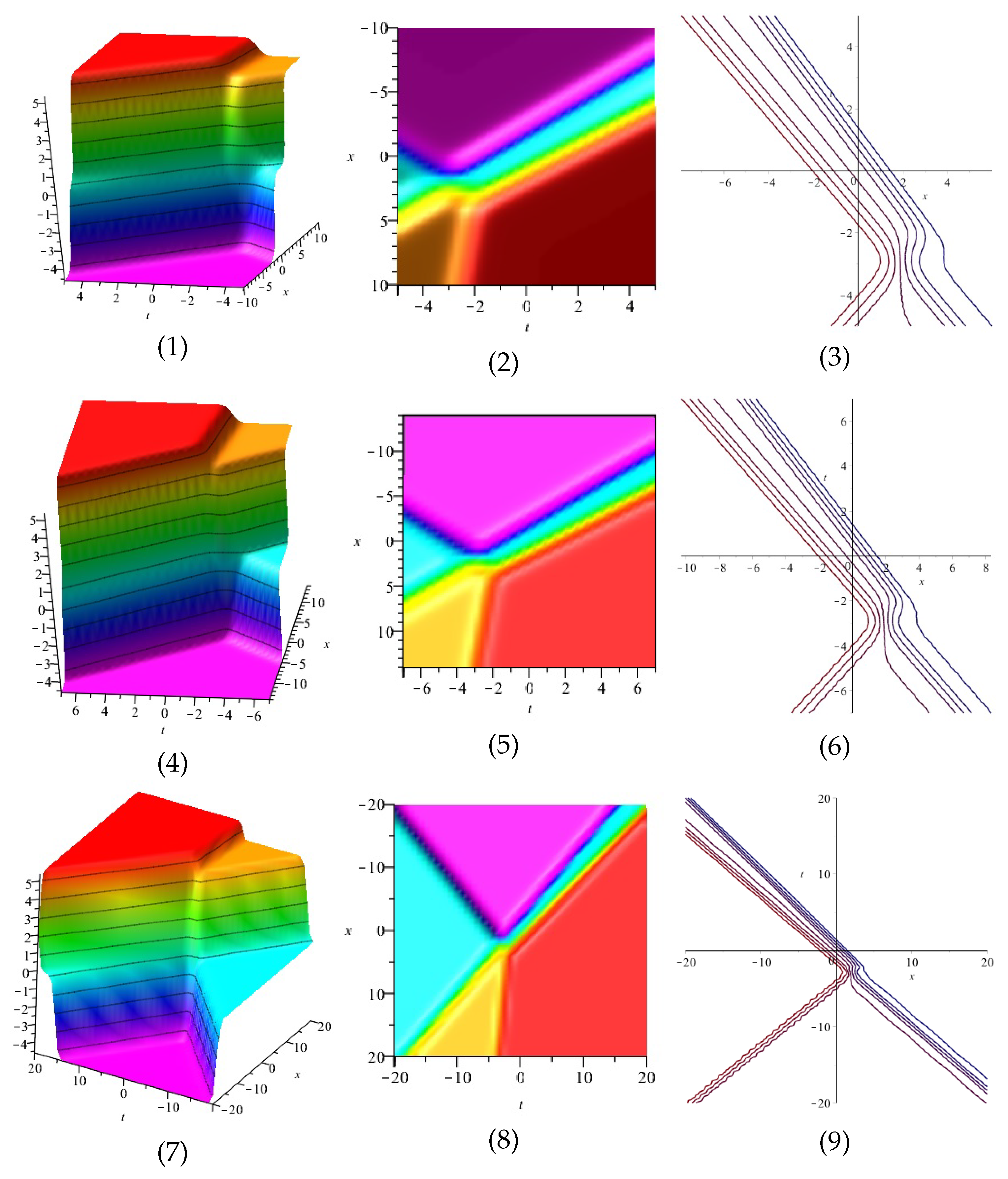
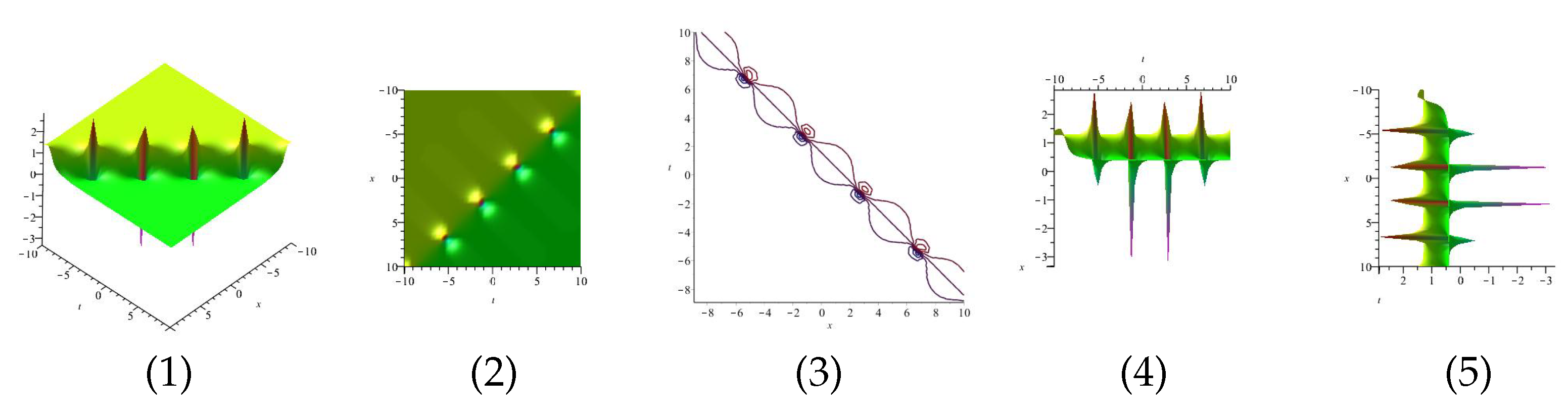
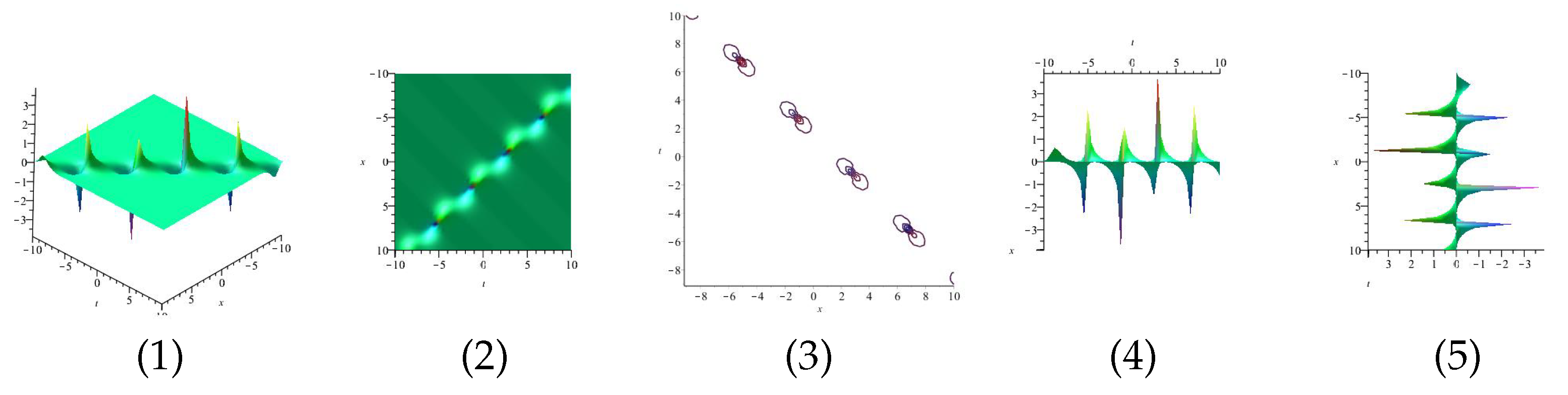
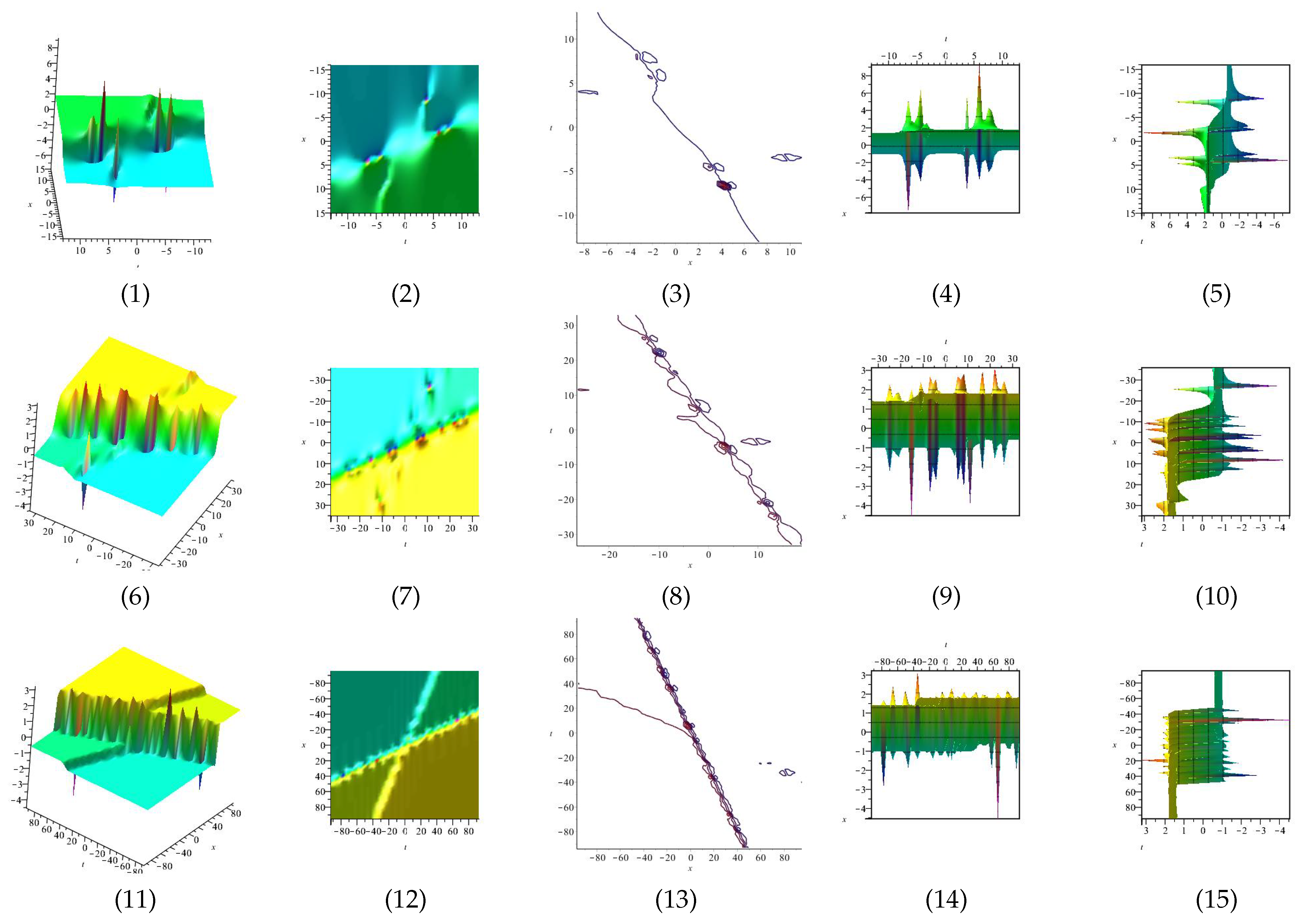
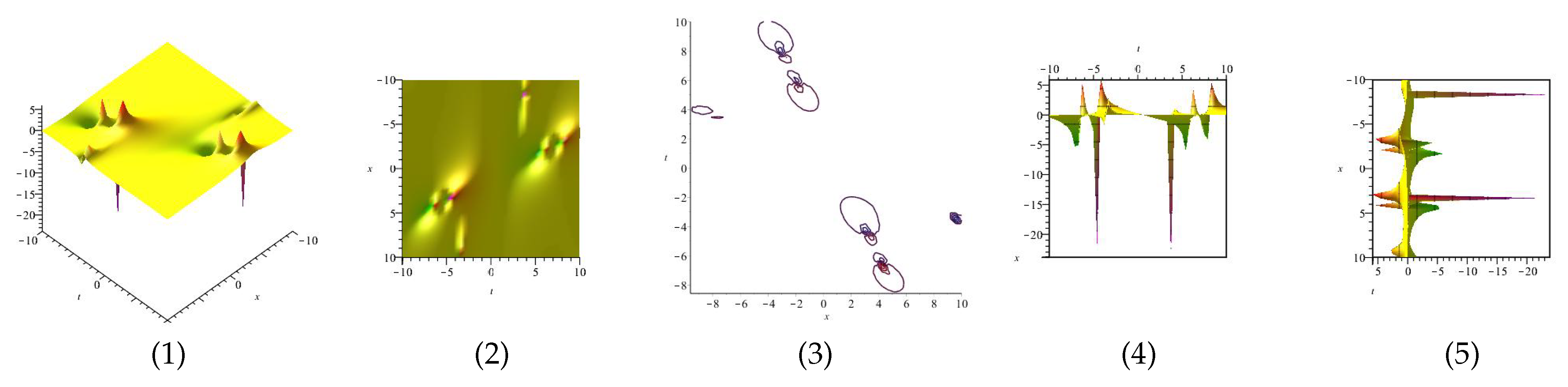
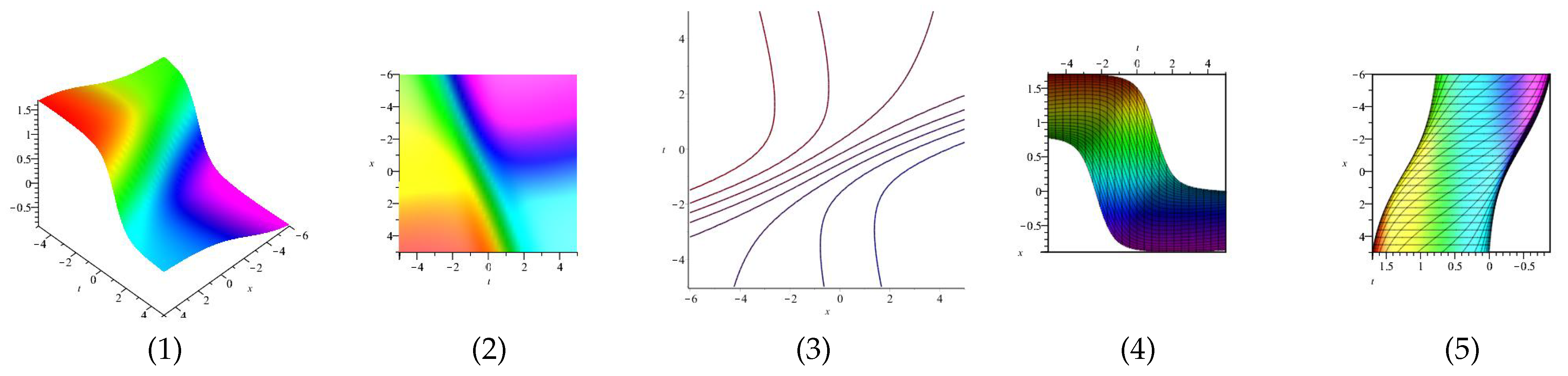
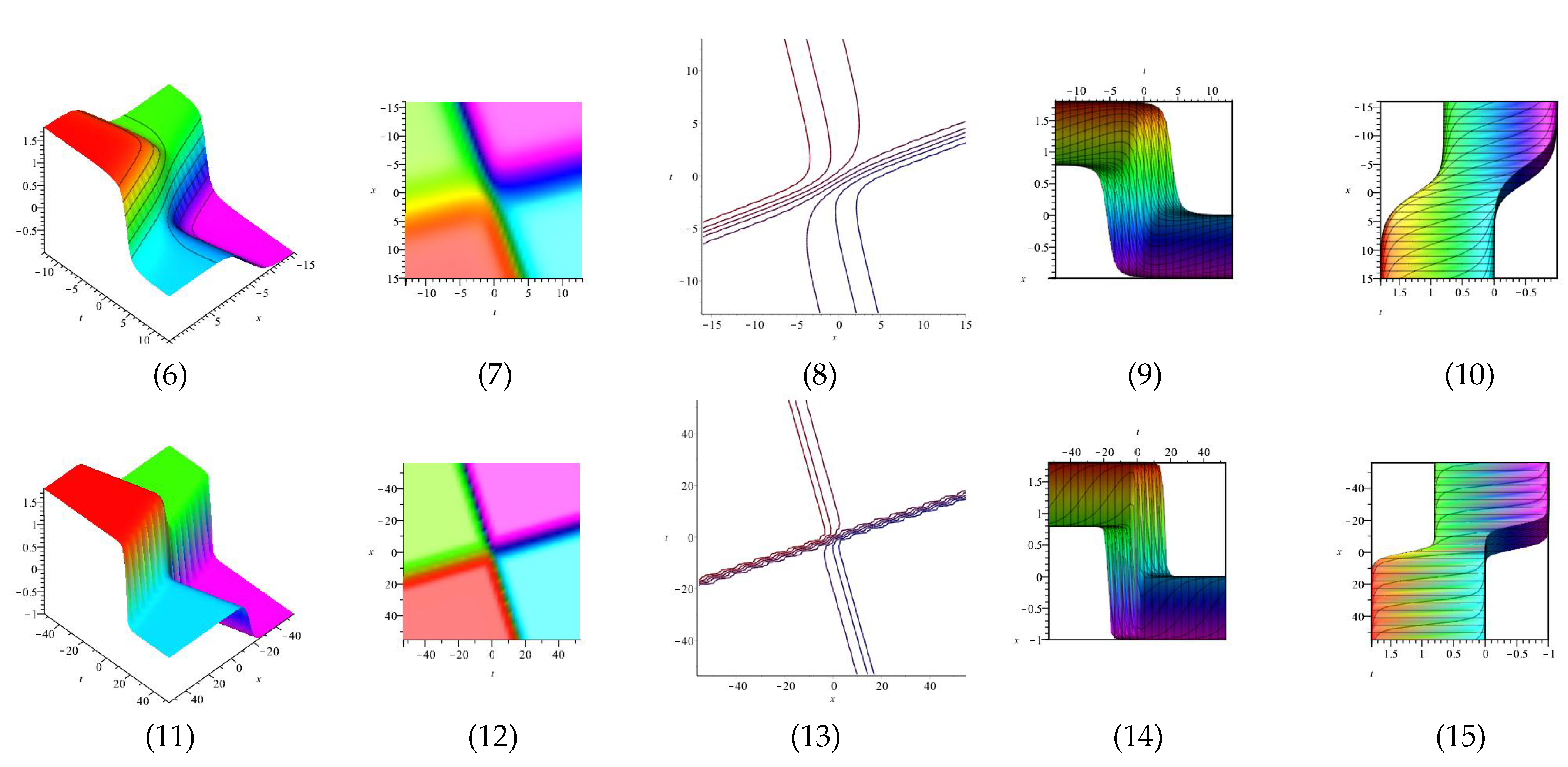
3.2.3. Example 3
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Javeed, S.; Abbasi, M.A.; Imran, T.; Fayyaz, R.; Ahmad, H.; Botmart, T. New soliton solutions of Simplified Modified Camassa Holm equation, Klein–Gordon–Zakharov equation using First Integral Method and Exponential Function Method. Results Phys. 2022, 38, 105506. [Google Scholar] [CrossRef]
- Gonzalez-Gaxiola, O.; Biswas, A.; Ekici, M.; Khan, S. Highly dispersive optical solitons with quadratic-cubic law of refractive index by the variational iteration method. J. Opt. 2022, 51, 29–36. [Google Scholar] [CrossRef]
- Zhang, C. Analytical and Numerical Solutions for the (3+1)-dimensional Extended Quantum Zakharov-Kuznetsov Equation. Appl. Comput. Math. 2022, 11, 74–80. [Google Scholar]
- Aderyani, S.R.; Saadati, R.; Vahidi, J.; Allahviranloo, T. The exact solutions of the conformable time-fractional modified nonlinear Schrödinger equation by the Trial equation method and modified Trial equation method. Adv. Math. Phys. 2022, 2022, 4318192. [Google Scholar] [CrossRef]
- Tarla, S.; Ali, K.K.; Yilmazer, R.; Osman, M.S. New optical solitons based on the perturbed Chen-Lee-Liu model through Jacobi elliptic function method. Opt. Quantum Electron. 2022, 54, 1–12. [Google Scholar] [CrossRef]
- Zafar, A.; Ali, K.K.; Raheel, M.; Nisar, K.S.; Bekir, A. Abundant M-fractional optical solitons to the pertubed Gerdjikov-Ivanov equation treating the mathematical nonlinear optics. Opt. Quantum Electron. 2022, 54, 1–17. [Google Scholar] [CrossRef]
- Fahim, M.R.A.; Kundu, P.R.; Islam, M.E.; Akbar, M.A.; Osman, M.S. Wave profile analysis of a couple of (3+1)-dimensional nonlinear evolution equations by sine-Gordon expansion approach. J. Ocean. Eng. Sci. 2022, 7, 272–279. [Google Scholar] [CrossRef]
- He, J.H.; El-Dib, Y.O. Homotopy perturbation method with three expansions. J. Math. Chem. 2022, 59, 1139–1150. [Google Scholar] [CrossRef]
- Mohanty, S.K.; Kumar, S.; Dev, A.N.; Deka, M.K.; Churikov, D.V.; Kravchenko, O.V. An efficient technique of ()-expansion method for modified KdV and Burgers equations with variable coefficients. Results Phys. 2022, 37, 105504. [Google Scholar] [CrossRef]
- Chu, Y.; Shallal, M.A.; Mirhosseini-Alizamini, S.M.; Rezazadeh, H.; Javeed, S.; Baleanu, D. Application of modified extended Tanh technique for solving complex Ginzburg-Landau equation considering Kerr law nonlinearity. Comput. Mater. Contin. 2022, 66, 1369–1378. [Google Scholar] [CrossRef]
- Polyanin, A.D.; Zaitsev, V.F. Handbook of Nonlinear Partial Differential Equations; Chapman and Hall/CRC: Boca Raton, FL, USA, 2016. [Google Scholar]
- Aderyani, S.R.; Saadati, R.; Abdeljawad, T.; Mlaiki, N. Multi-stability of non homogenous vector-valued fractional differential equations in matrix-valued Menger spaces. Alex. Eng. J. 2022, 61, 10913–10923. [Google Scholar] [CrossRef]
- Moretlo, T.S.; Adem, A.R.; Muatjetjeja, B. A generalized (1+2)-dimensional Bogoyavlenskii–Kadomtsev–Petviashvili (BKP) equation: Multiple exp-function algorithm; conservation laws; similarity solutions. Commun. Nonlinear Sci. Numer. Simul. 2022, 106, 106072. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x, y, z, t | ||
|---|---|---|
| 0.001 | 0.888977 | 0.555496 |
| 0.01 | 0.889778 | 0.554962 |
| 0.1 | 0.897864 | 0.549552 |
| 1.001 | 0.984586 | 0.491037 |
| x, y, z, t | ||
|---|---|---|
| 0.001 | 0.425164 | 0.425174 |
| 0.01 | 0.426648 | 0.426748 |
| 0.1 | 0.441306 | 0.442298 |
| 1.001 | 0.562420 | 0.570334 |
| x, y, z, t | ||||
|---|---|---|---|---|
| 0.001 | 1.033866 | 1.033866 | 1.033852 | 1.033919 |
| 0.01 | 1.038666 | 1.038666 | 1.038521 | 1.039200 |
| 0.1 | 1.086627 | 1.086627 | 1.085062 | 1.092440 |
| 1.001 | 1.518980 | 1.518980 | 1.501674 | 1.576044 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aderyani, S.R.; Saadati, R.; O’Regan, D.; Alshammari, F.S. Existence, Uniqueness and Stability Analysis with the Multiple Exp Function Method for NPDEs. Mathematics 2022, 10, 4151. https://doi.org/10.3390/math10214151
Aderyani SR, Saadati R, O’Regan D, Alshammari FS. Existence, Uniqueness and Stability Analysis with the Multiple Exp Function Method for NPDEs. Mathematics. 2022; 10(21):4151. https://doi.org/10.3390/math10214151
Chicago/Turabian StyleAderyani, Safoura Rezaei, Reza Saadati, Donal O’Regan, and Fehaid Salem Alshammari. 2022. "Existence, Uniqueness and Stability Analysis with the Multiple Exp Function Method for NPDEs" Mathematics 10, no. 21: 4151. https://doi.org/10.3390/math10214151