
Framework for Estimating Performance and Associated Uncertainty for Modified Aircraft Configurations

Abstract
:1. Introduction
- Baseline model: this is a computational model of the original, certified aircraft.
- Tuned model (also known as flight test model or observed model): this is a model obtained from the observation of the baseline model.
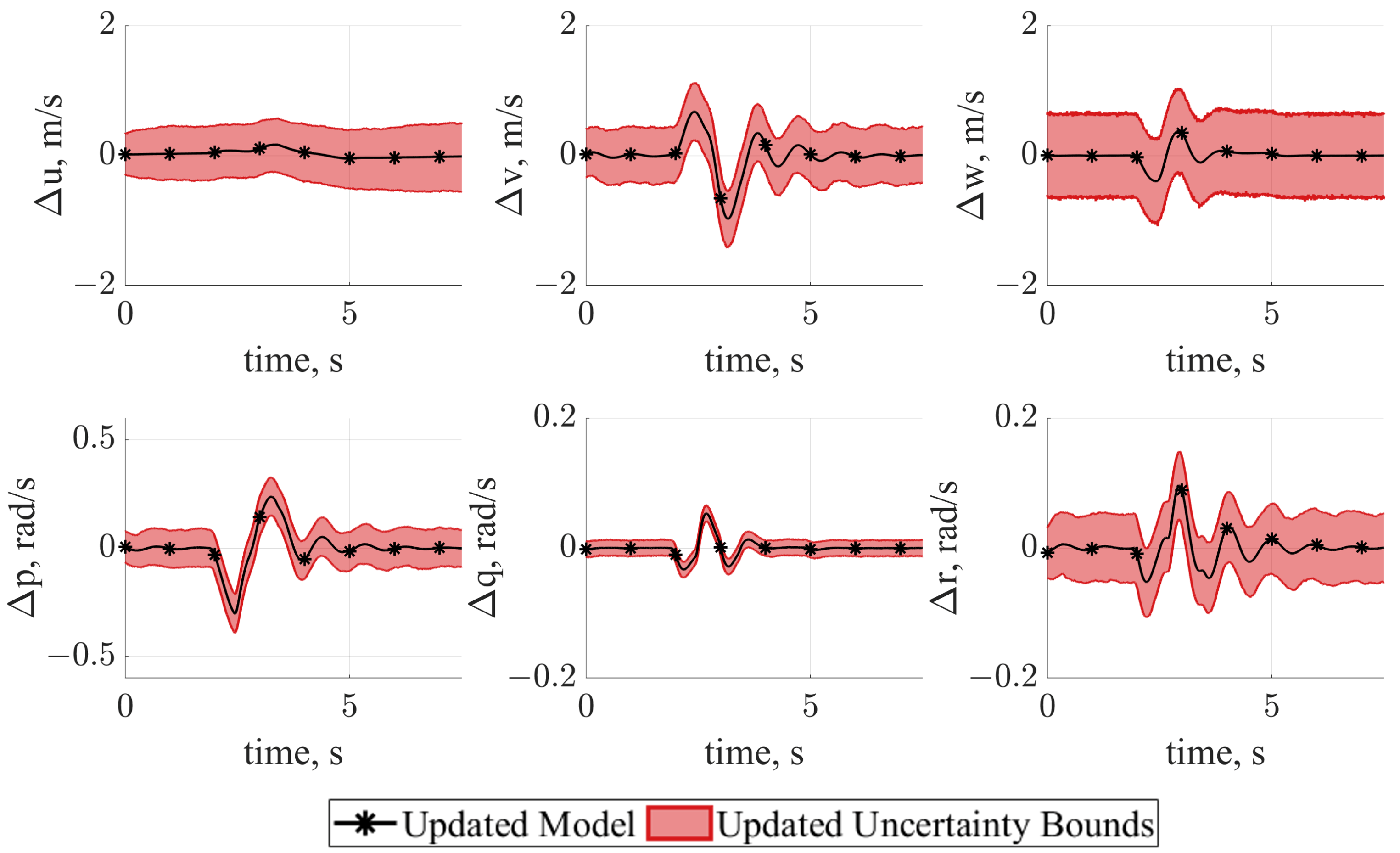
- Updated model: this is a model of the modified aircraft configuration, generated using one of the two proposed methods to account for changes due to the modification.
2. Analysis of Nominal Configuration
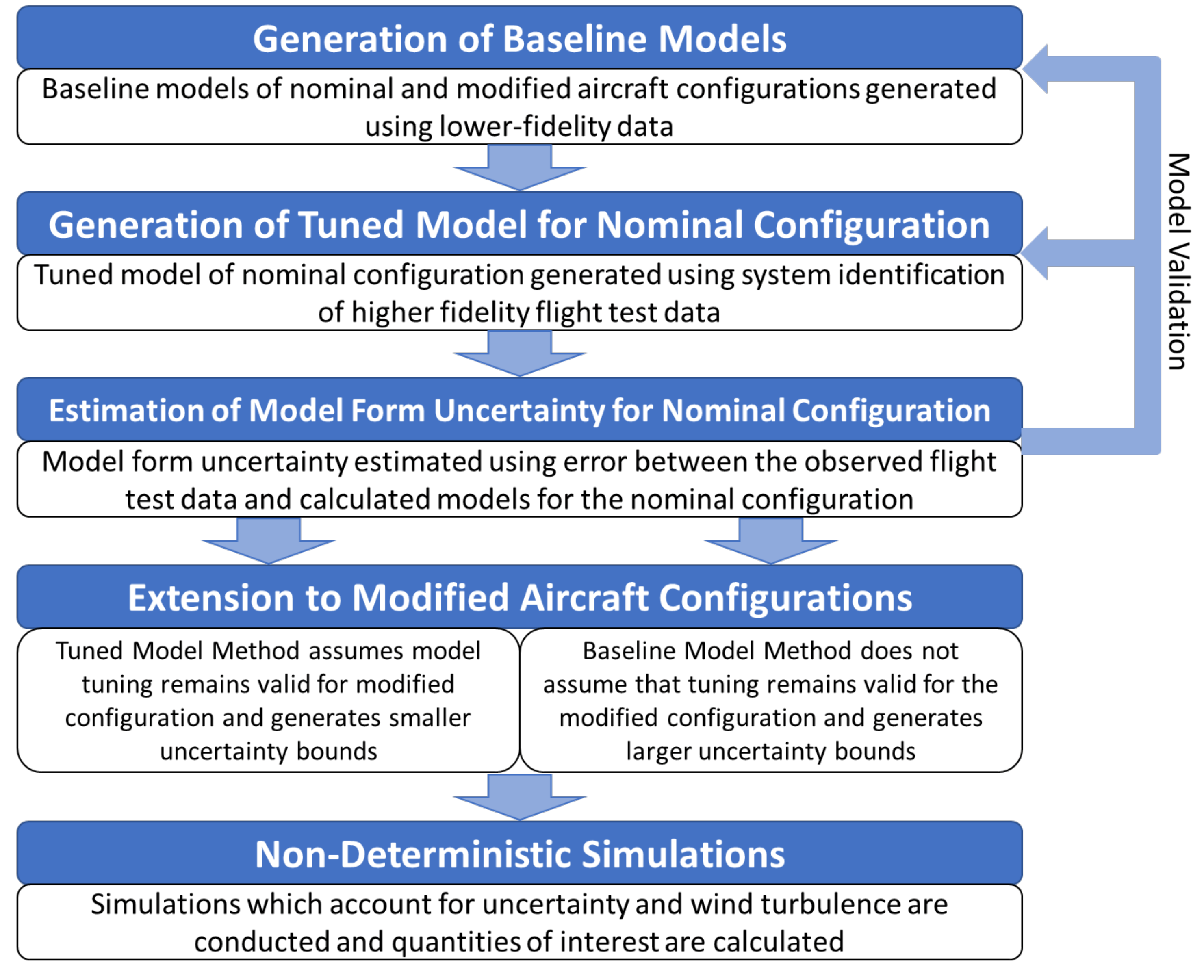
2.1. Generation of Baseline Models
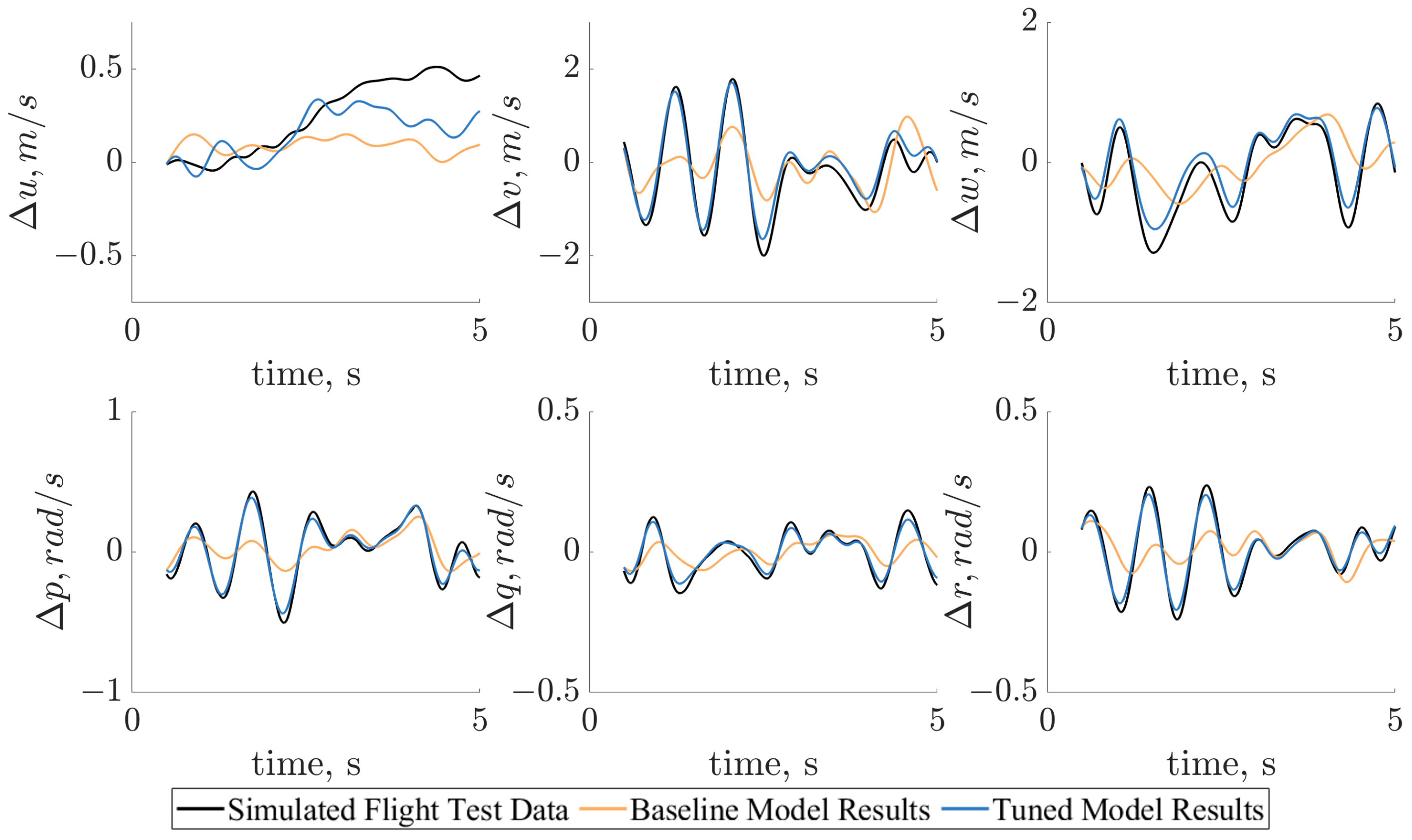
2.2. Generation of Tuned Model
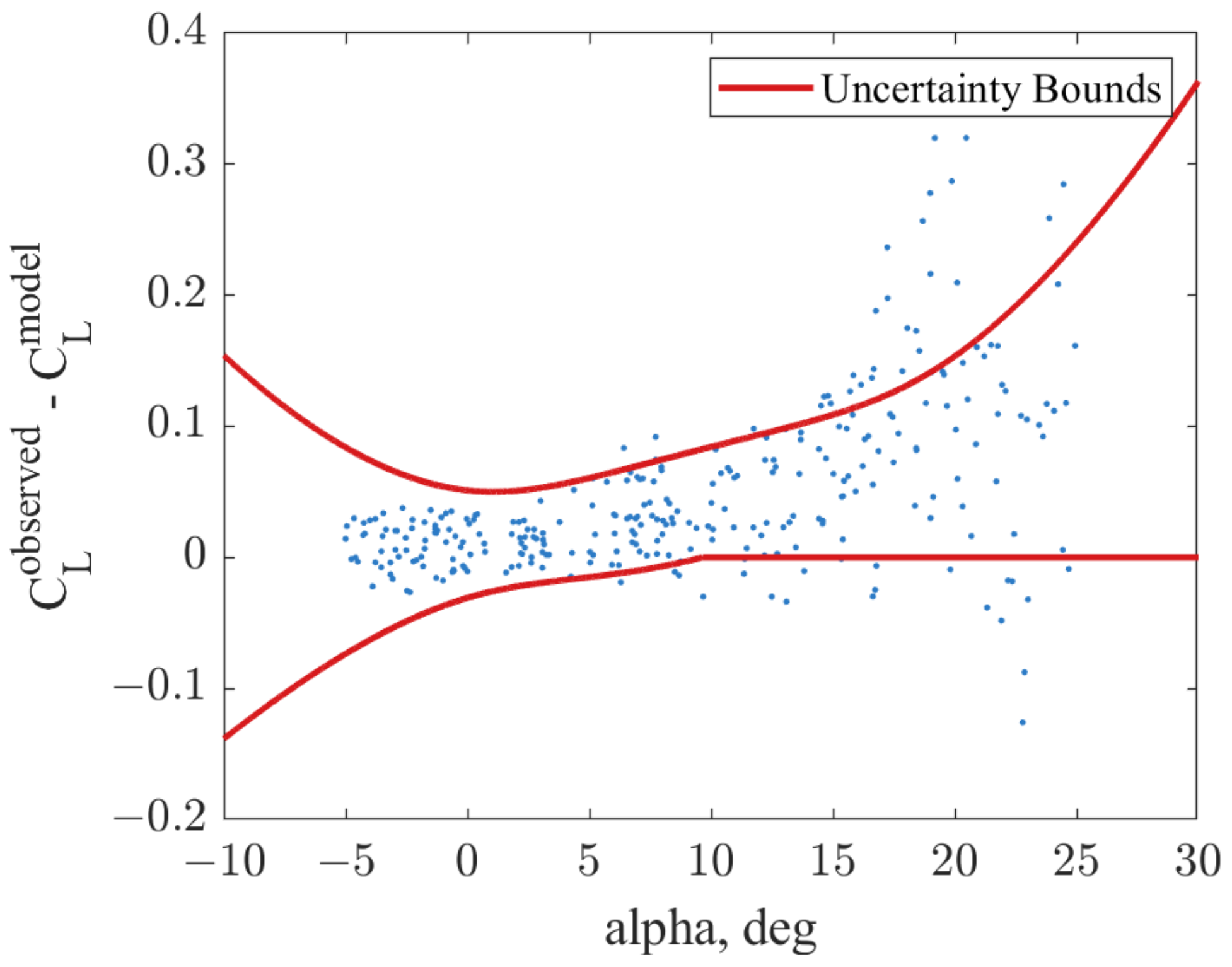
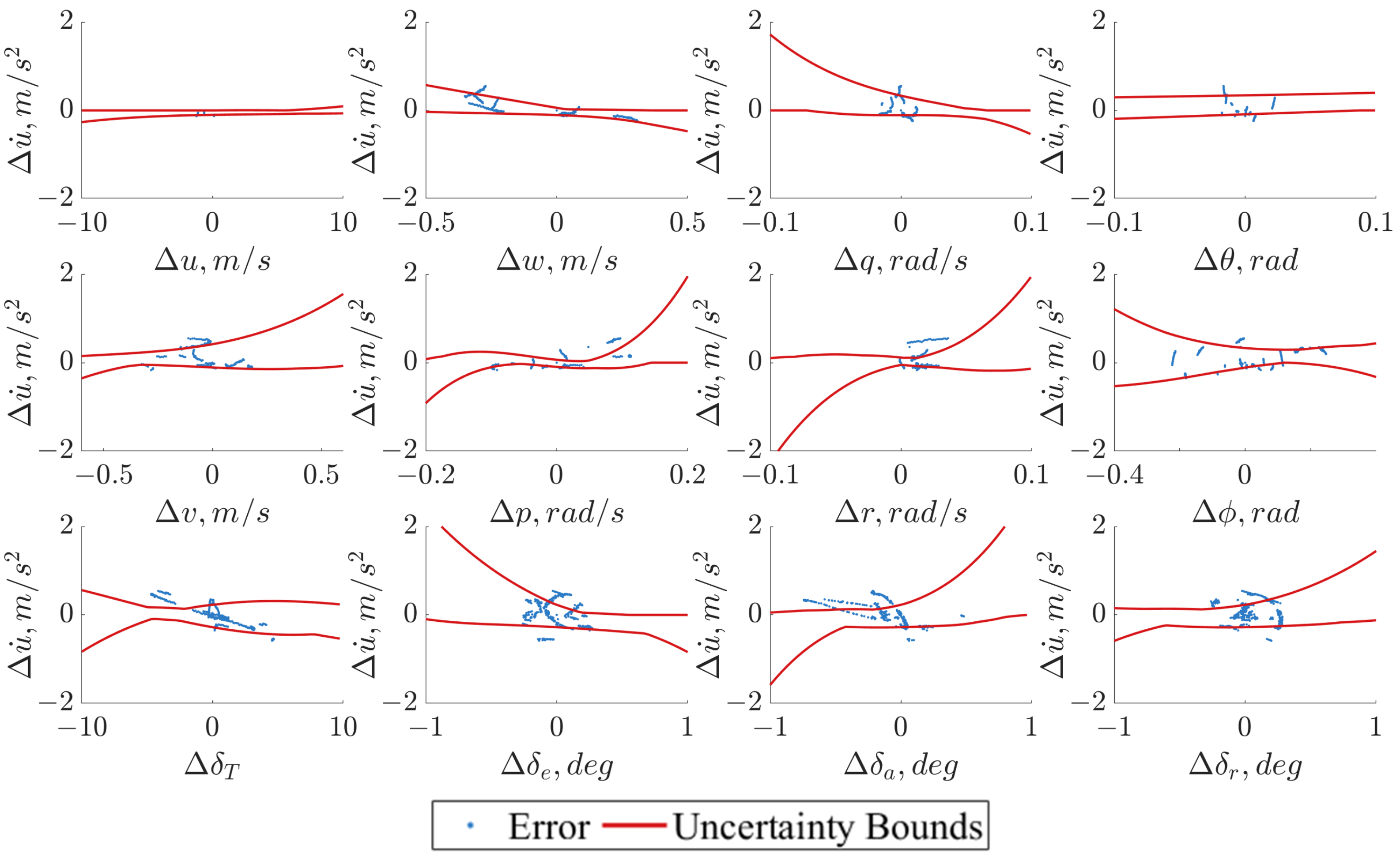
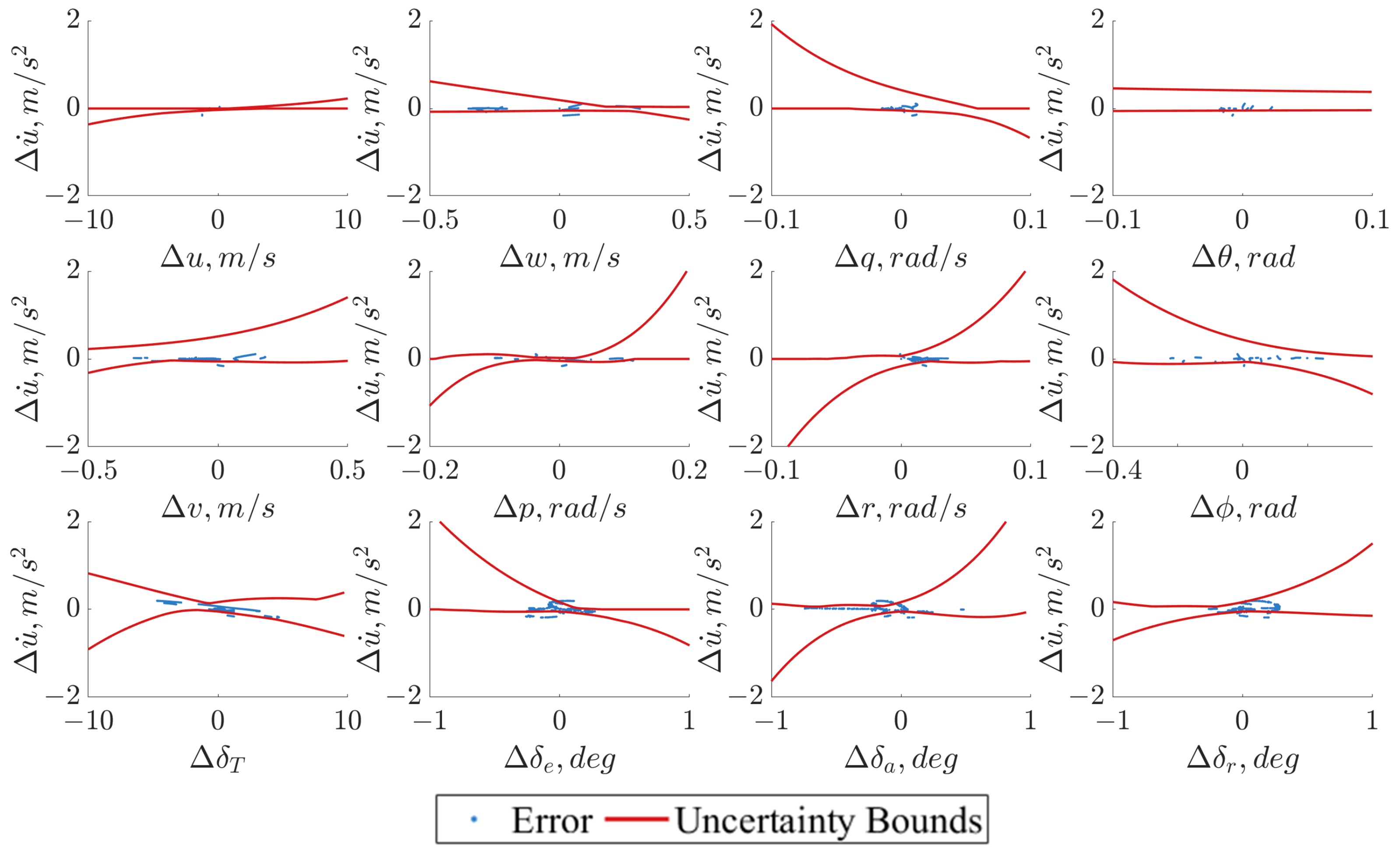
2.3. Estimation of Model Form Uncertainty
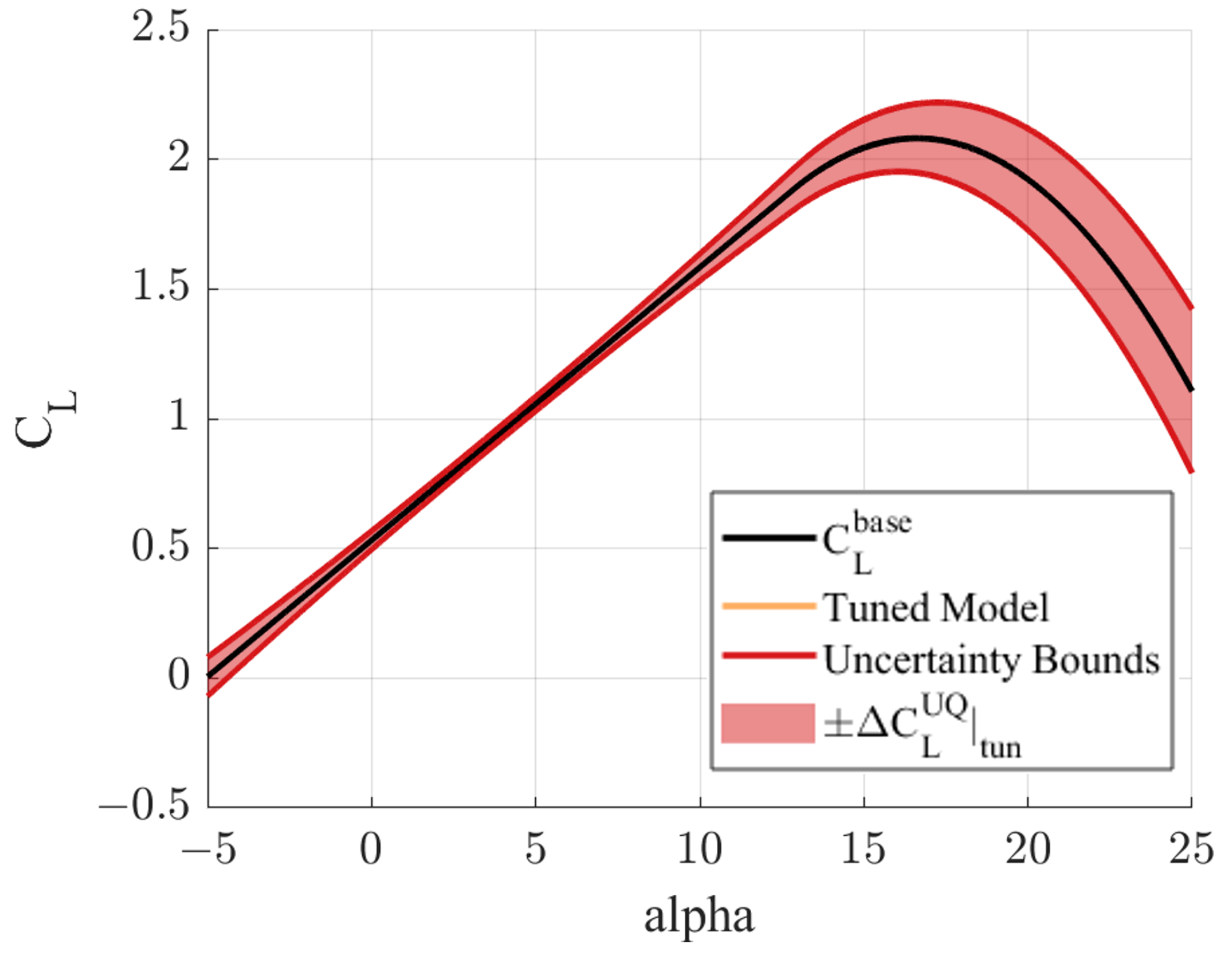
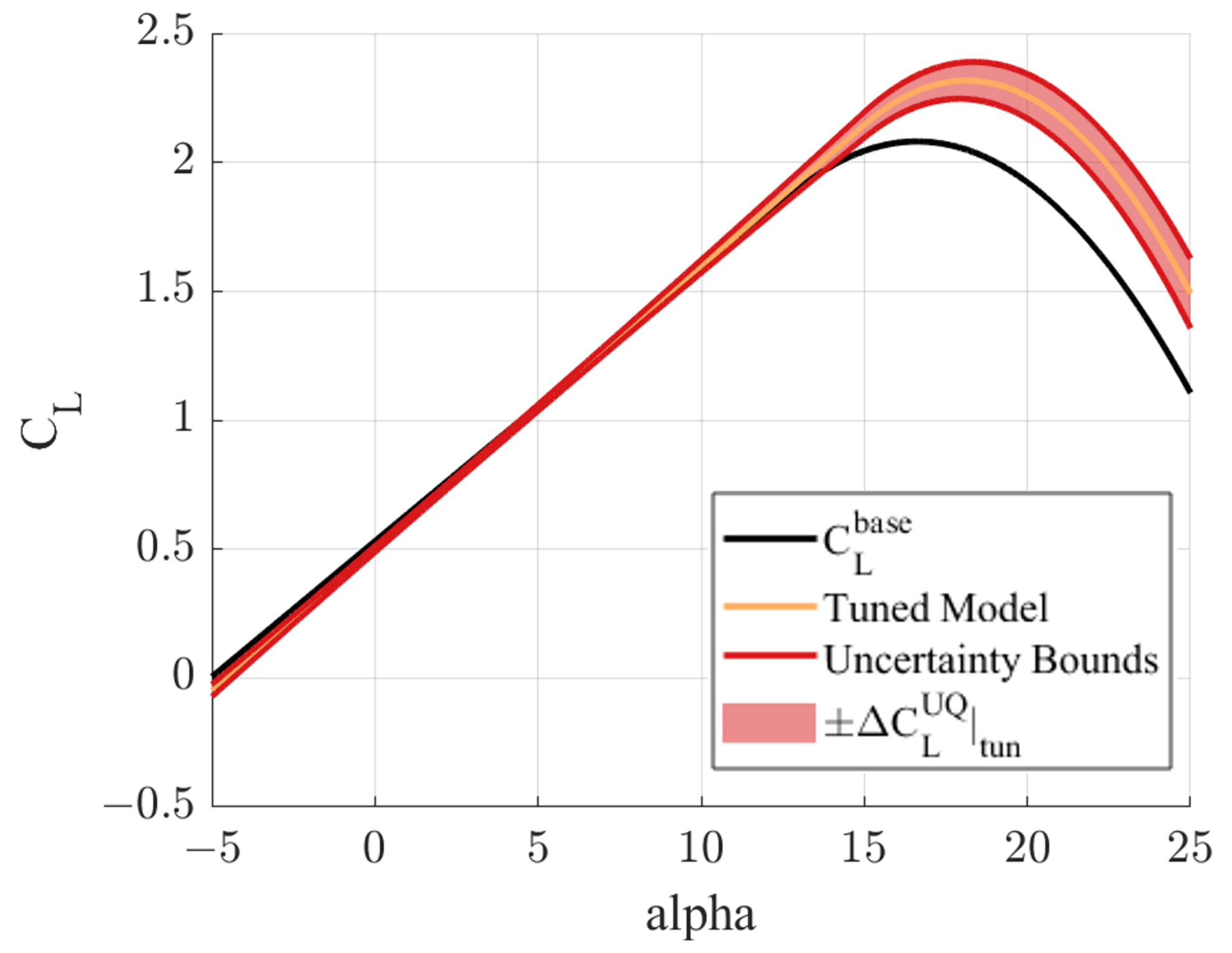
2.4. Extension to Modified Aircraft Configurations
2.5. Non-Deterministic Simulation
3. Analysis of Modified Configurations
3.1. Uncertainty Estimation Method 1—Tuned Model Method
3.2. Uncertainty Estimation Method 2—Baseline Model Method
3.3. Use of the Two Methods
4. Uncertainty Estimation for an Example Aircraft System
4.1. Example Aircraft System
4.2. Model Definitions for Example Aircraft System
4.3. Uncertainty Estimation Methods for Example Aircraft System
5. Validation of Framework for an Example Aircraft System
5.1. Validation of Performance Estimation without Noise
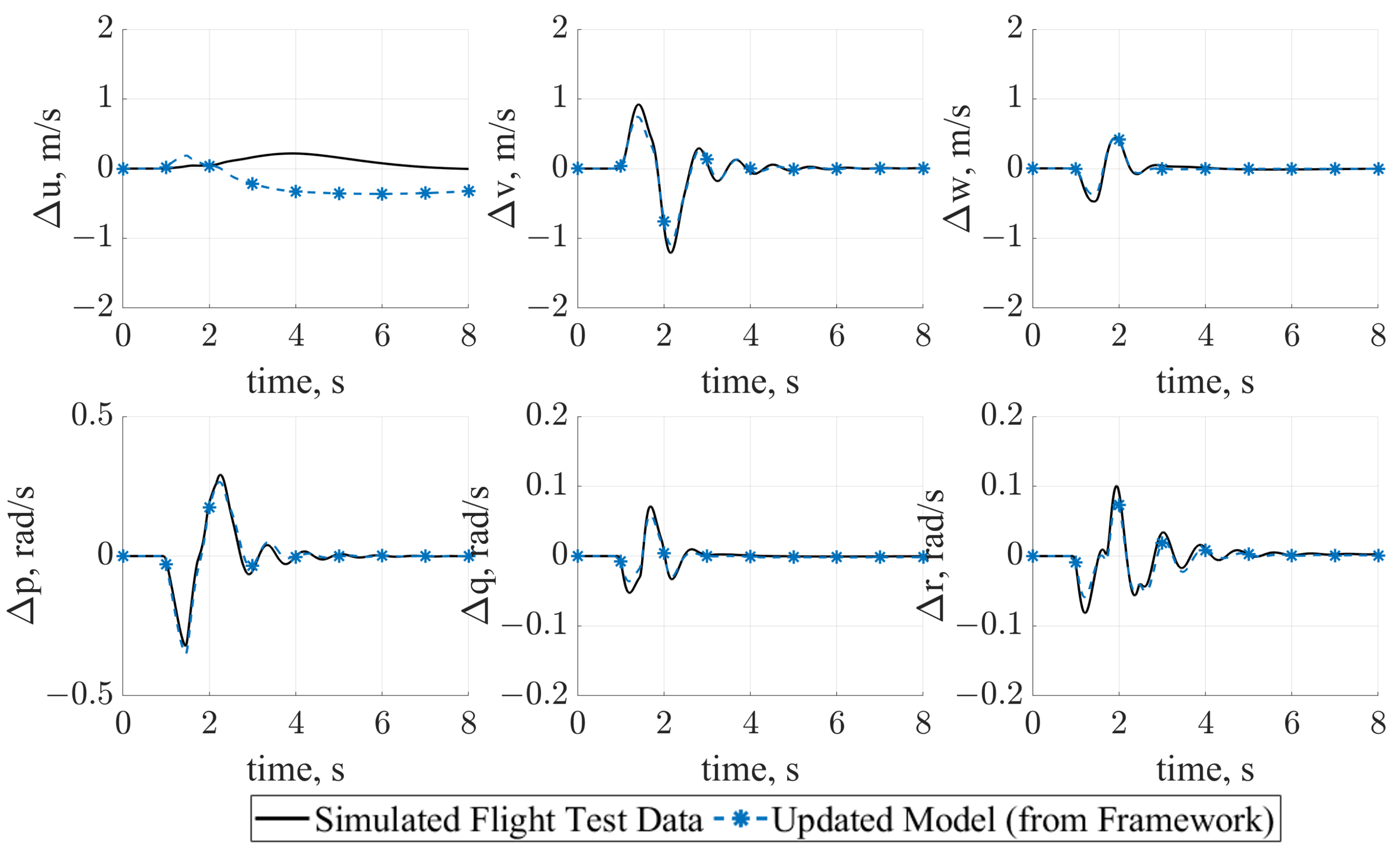
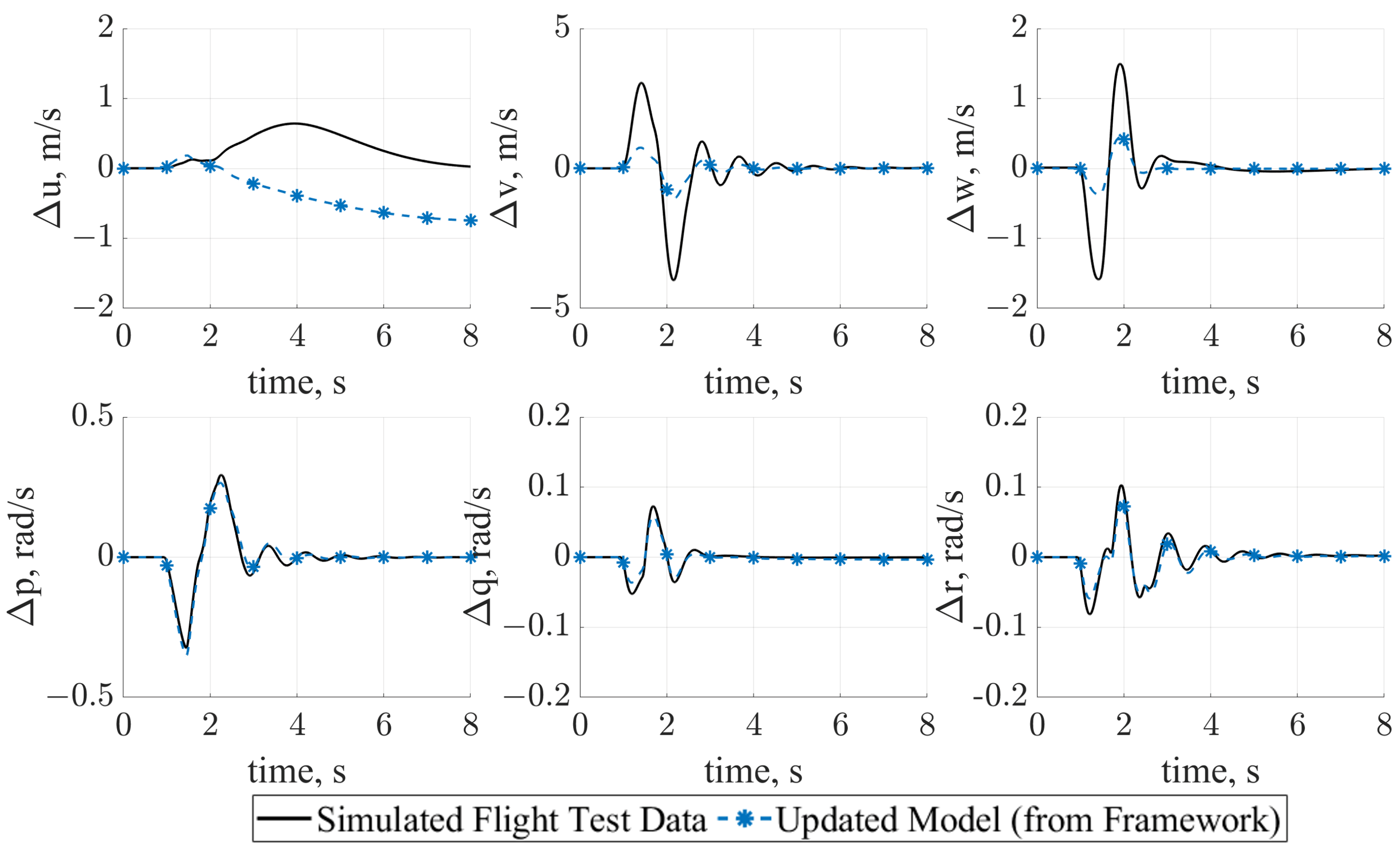
5.2. Validation of Performance Estimation
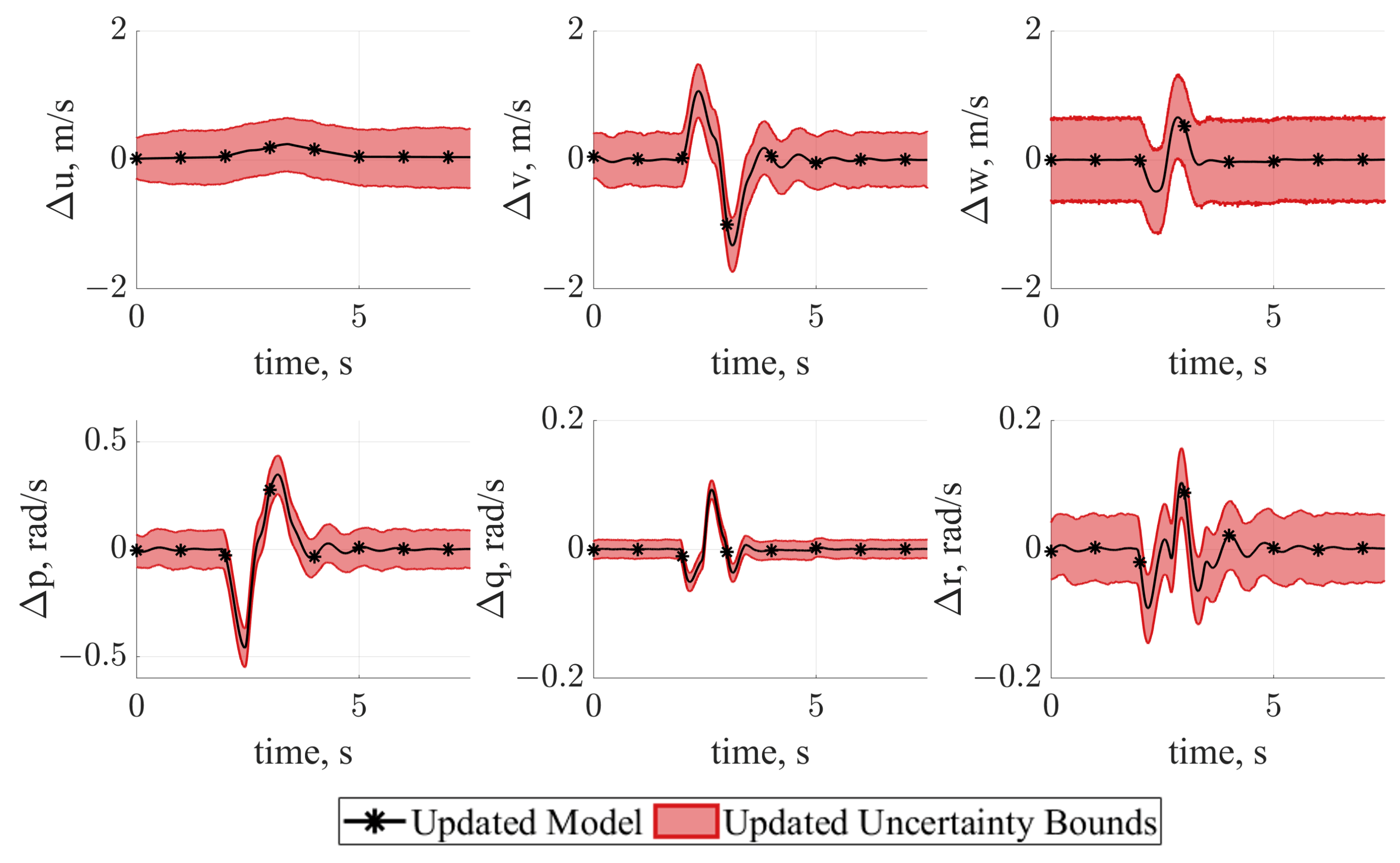
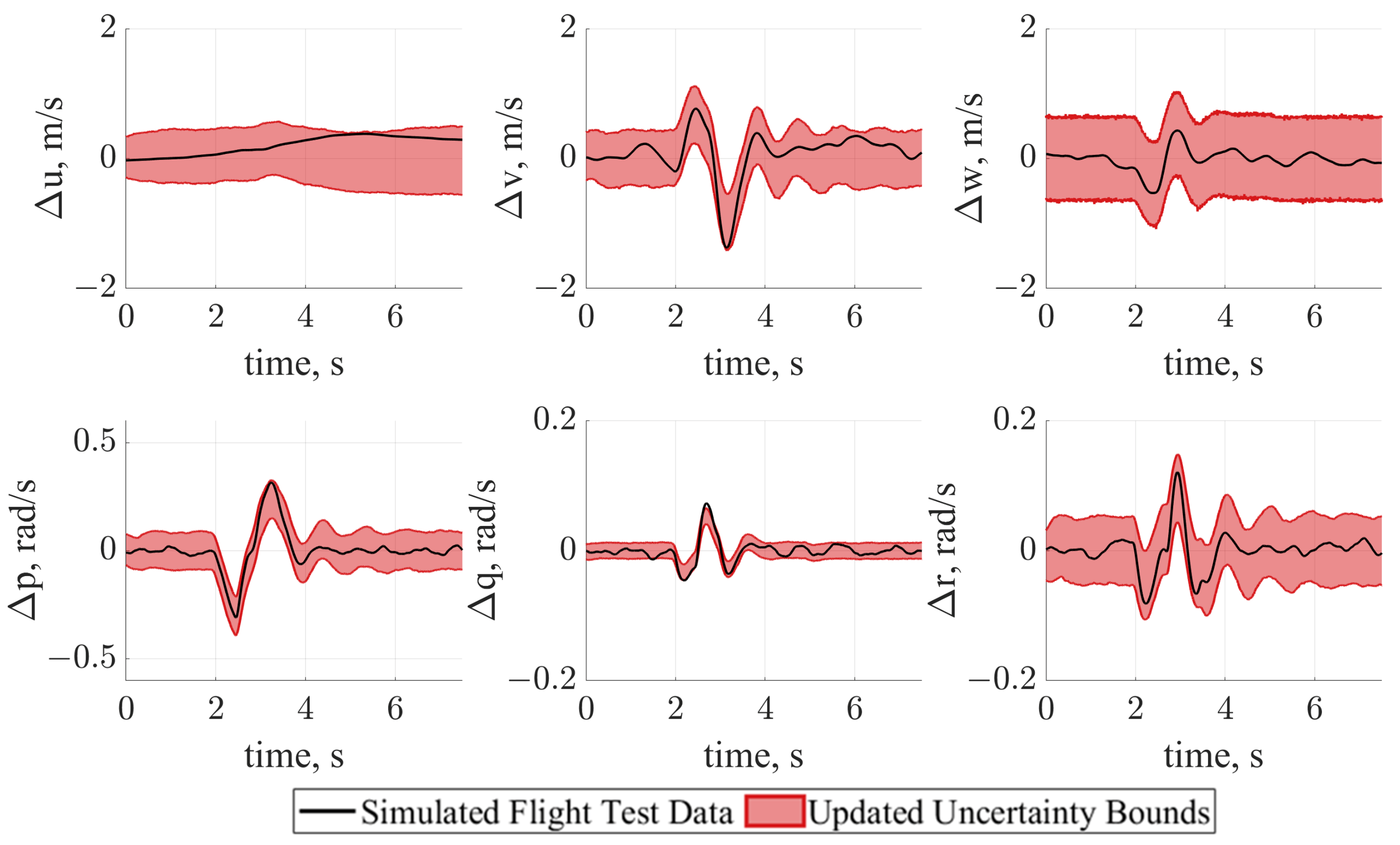
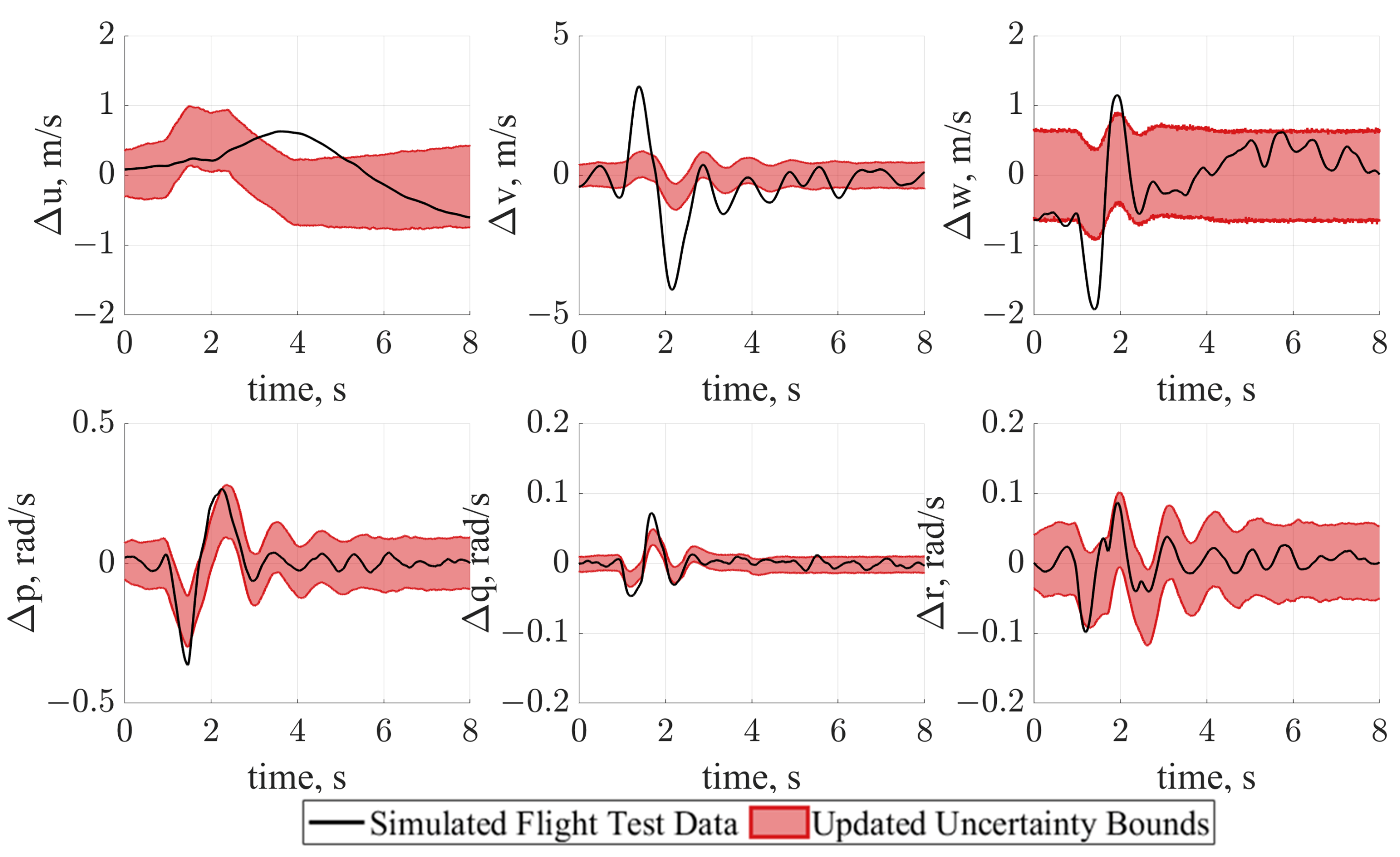
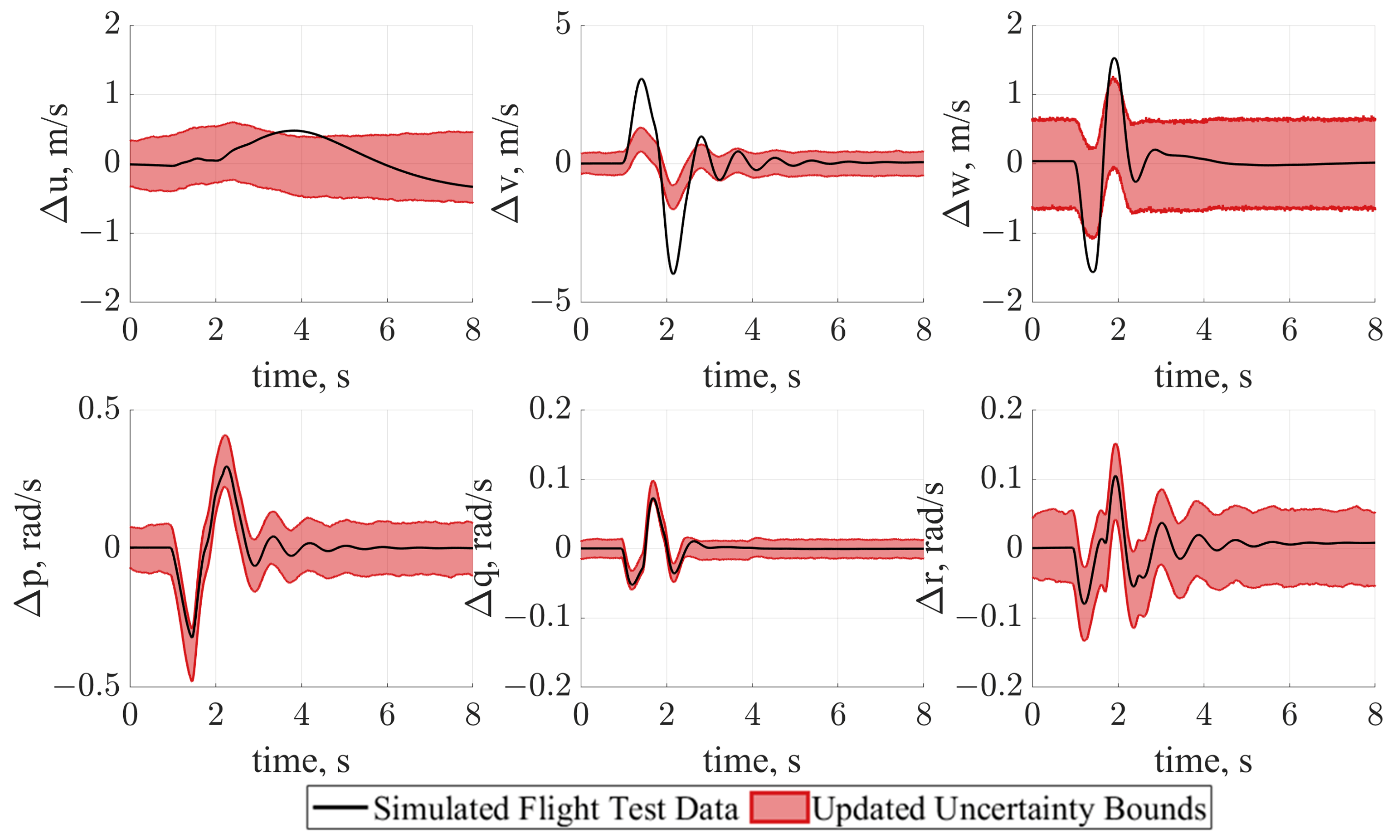
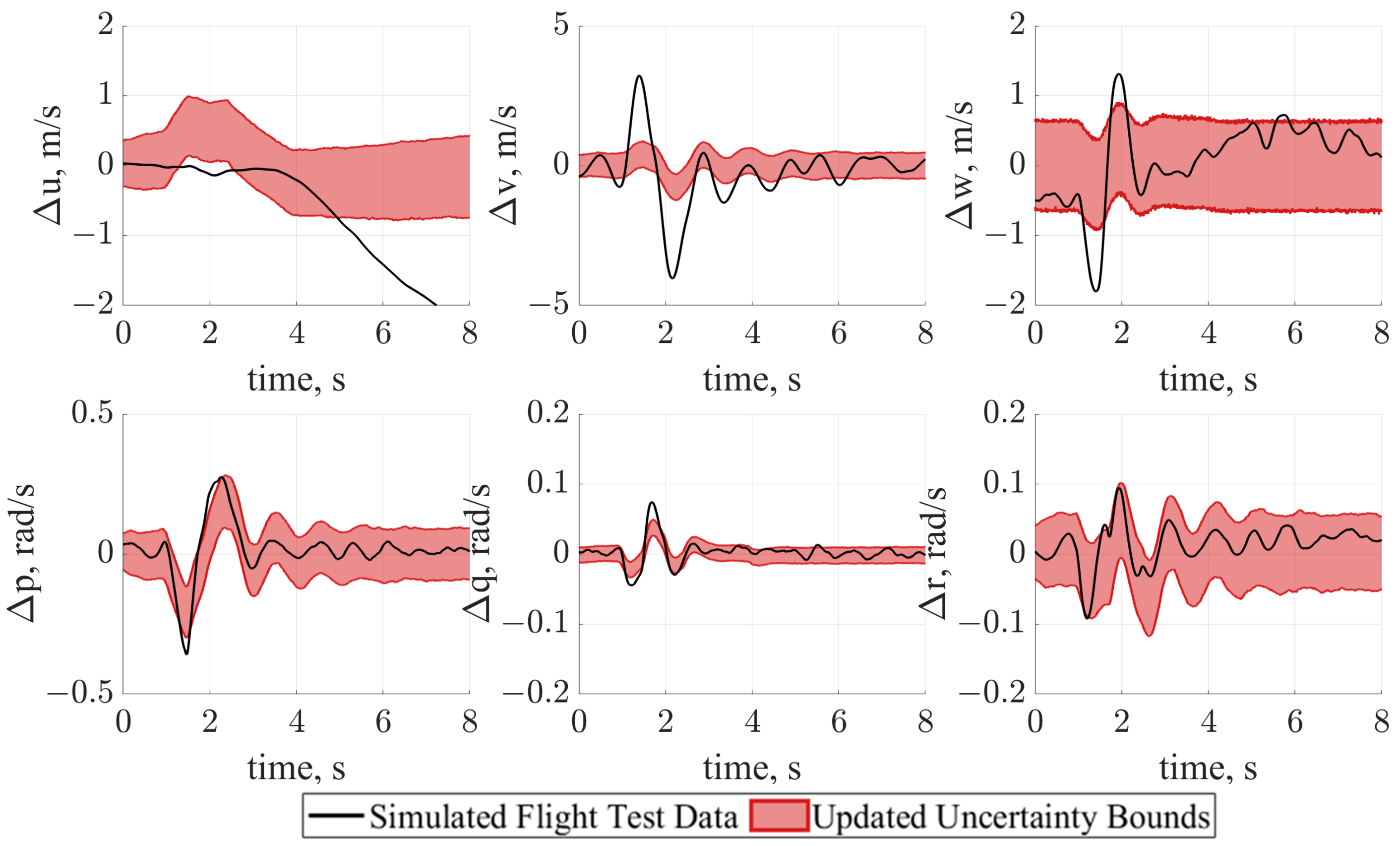
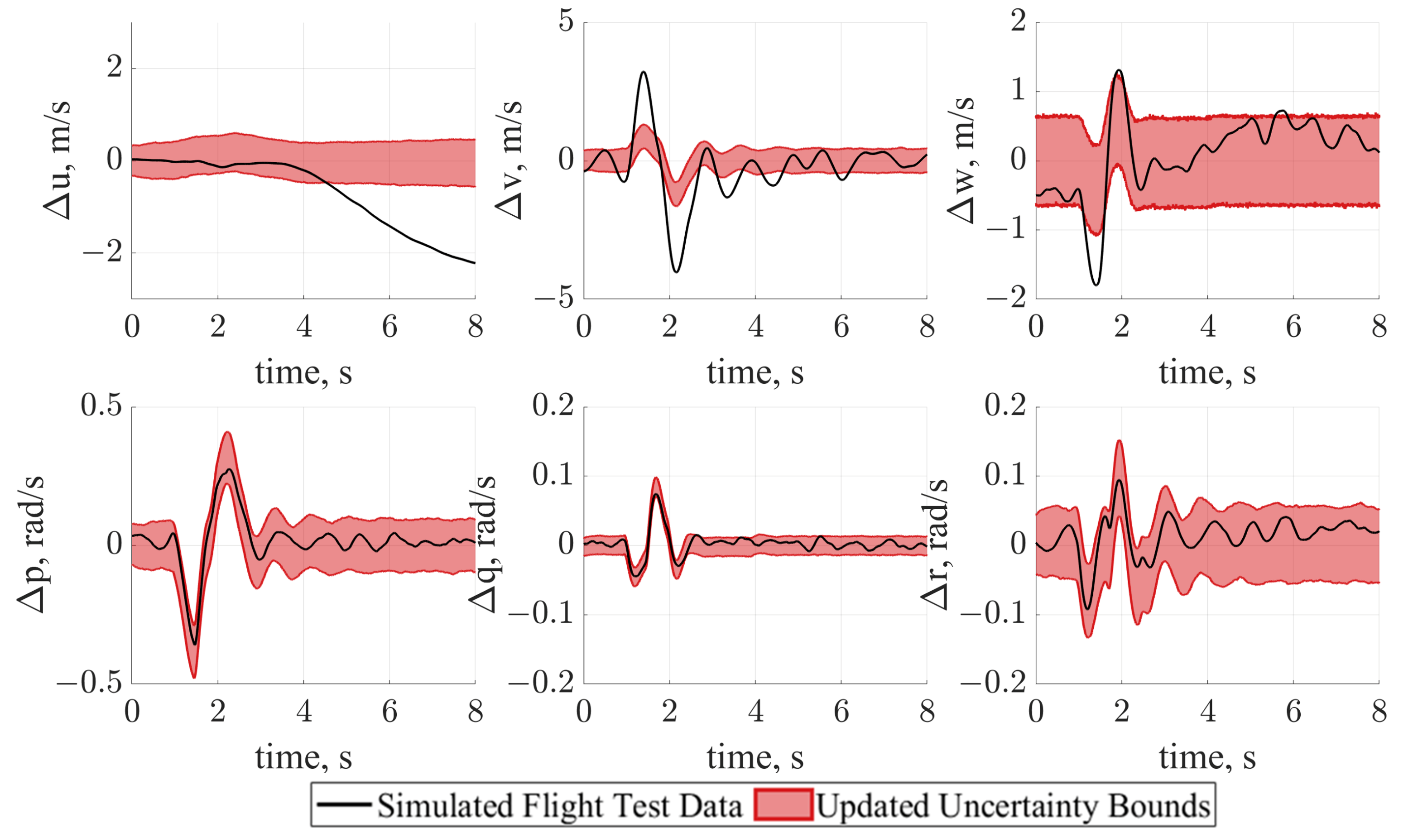
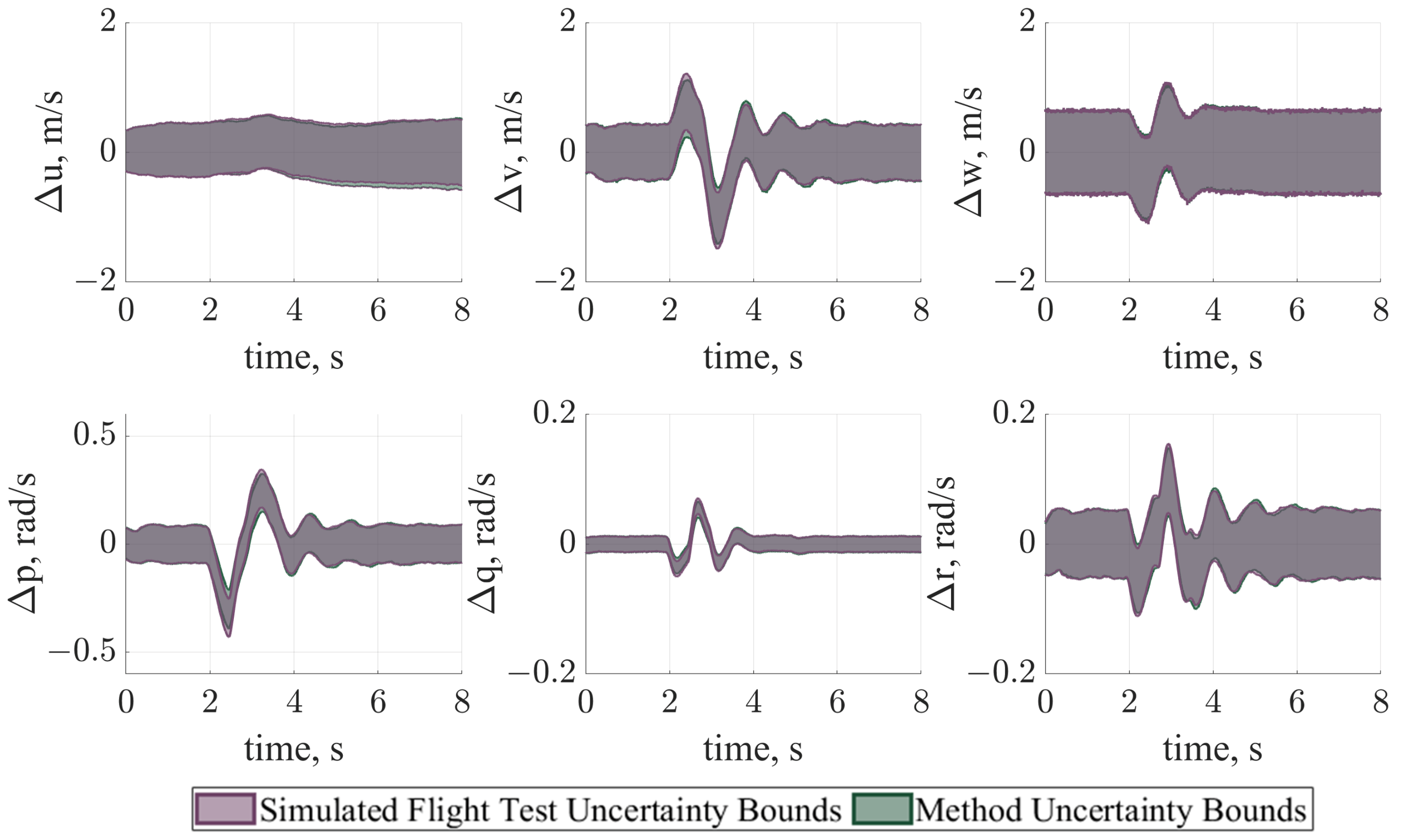
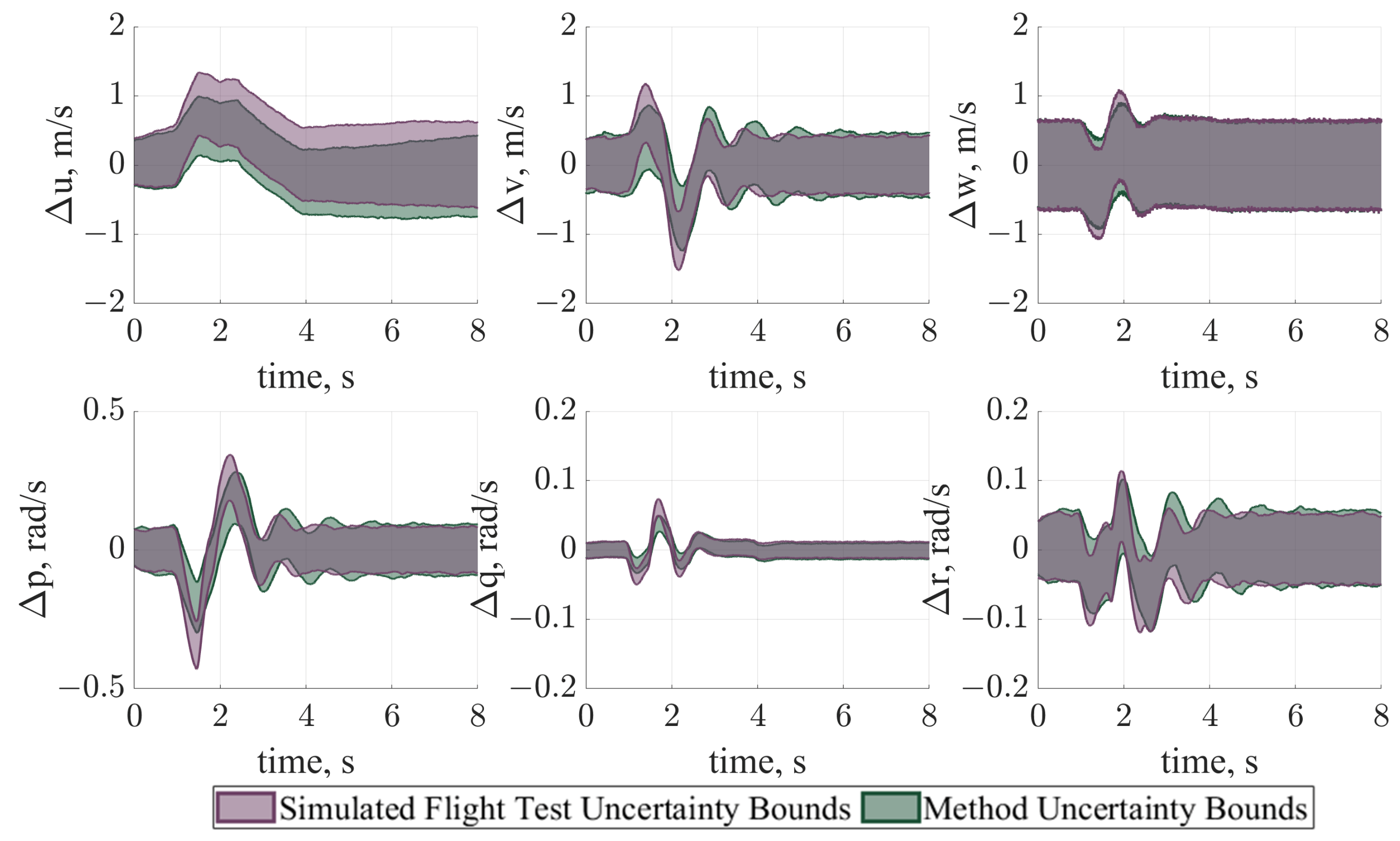
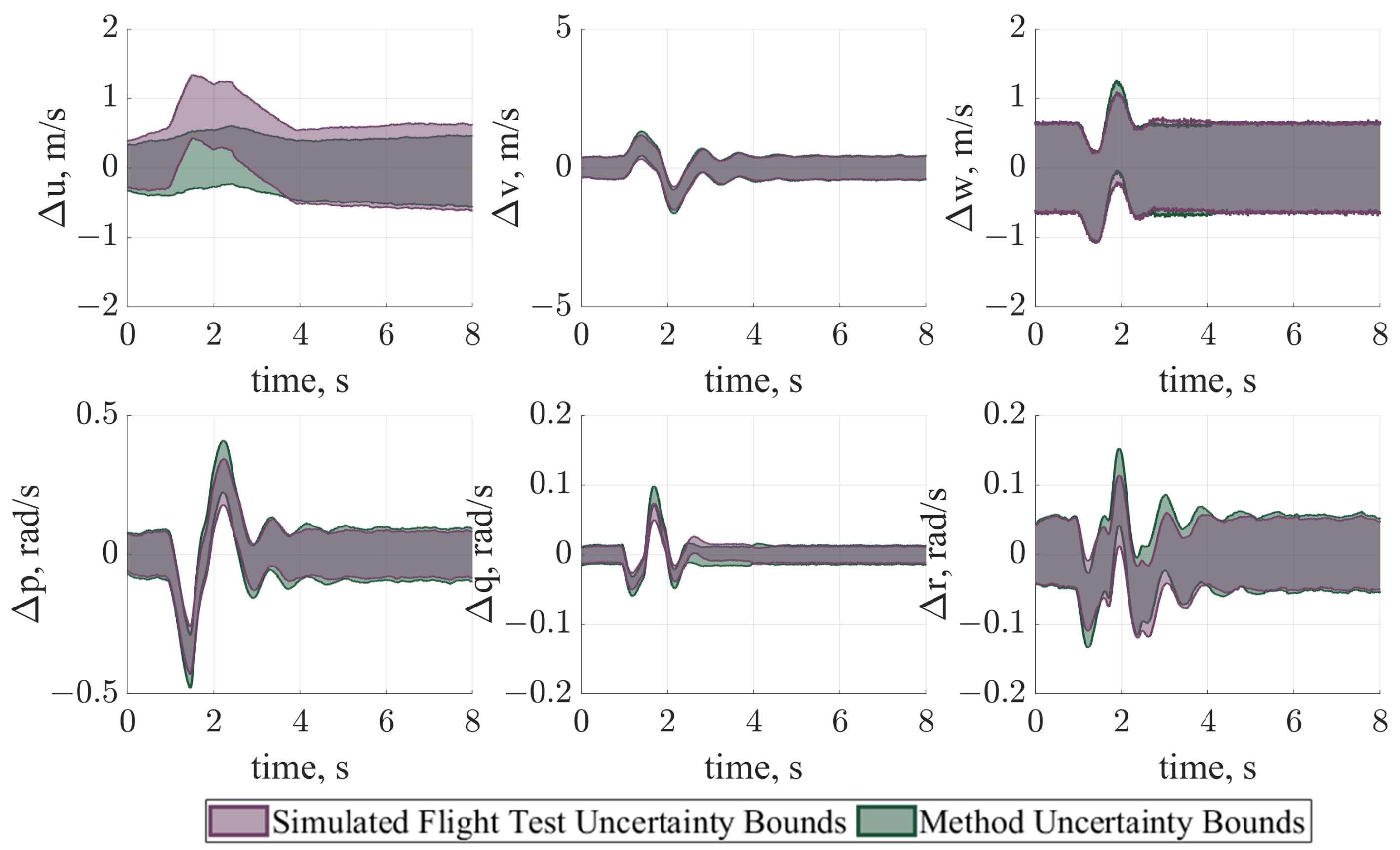
5.3. Validation of Uncertainty Estimation Methods
6. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| generalized aerodynamic coefficient | |
| value of generalized coefficient from baseline model for the nominal configuration | |
| body-axis velocities in the x, y, and z directions, respectively, | |
| aircraft trim velocity | |
| body-axis angular rates, about the x, y, and z directions, respectively, | |
| aileron deflection | |
| elevator deflection | |
| rudder deflection | |
| throttle deflection | |
| change in baseline model due to modified configuration, difference between modified | |
| configuration and nominal configuration | |
| additional correction due to tuning of modified configuration model | |
| additional uncertainty bounds from model form uncertainty for modified configuration, | |
| evaluated about the baseline model | |
| additional uncertainty bounds from model form uncertainty for modified configuration, | |
| evaluated about the tuned model |
| correction due to model tuning, difference between tuned model and baseline model for | |
| nominal configuration | |
| uncertainty bounds from model form uncertainty for nominal configuration, evaluated | |
| about the baseline model | |
| uncertainty bounds from model form uncertainty for nominal configuration, evaluated | |
| about the tuned model | |
| pitch angle | |
| roll angle |
References
- Lucka, D.A. Refining the U.S. Navy Flight Clearance (Airworthiness Certification) Process: Maximizing Acquisition Reform Benefits for Commercial Derivative Aircraft Acquisitions. Master’s Thesis, University of Tennessee, Knoxville, TN, USA, 2003. [Google Scholar]
- Flight Clearance Policy for Air Vehicles and Aircraft Systems; NAVARINST 13034.1D; Naval Air Systems Command: Patuxent River, MD, USA, 2010.
- Standard Airworthiness Certification Regulations; Federal Aviation Administration: Washington, DC, USA, 2021.
- American Institute of Aeronautics and Astronautics (Ed.) Recommended Practice: When Flight Modelling Is Used to Reduce Flight Testing Supporting Aircraft Certification; AIAA R-154-2021; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2021. [Google Scholar] [CrossRef]
- Schaefer, J.A.; Romero, V.J.; Schafer, S.R.; Leyde, B.; Denham, C.L. Approaches for Quantifying Uncertainties in Computational Modeling for Aerospace Applications. In Proceedings of the AIAA Scitech 2020 Forum; Orlando, FL, USA, 6–10 January 2020, AIAA 2020-1520; American Institute of Aeronautics and Astronautics: Orlando, FL, USA, 2020. [Google Scholar] [CrossRef]
- National Research Council (Ed.) Evaluation of Quantification of Margins and Uncertainties Methodology for Assessing and Certifying the Reliability of the Nuclear Stockpile; National Academies Press: Washington, DC, USA, 2009. [Google Scholar] [CrossRef]
- Mehta, U.B.; Eklund, D.R.; Romero, V.J.; Pearce, J.A.; Keim, N.S. Simulation Credibilty—Advances in Vertification, Validation, and Uncertainty Quantification; Number NASA TP-2016-219422; National Aeronautics and Space Administration: Washington, DC, USA, 2016. [Google Scholar]
- Roy, C.J.; Oberkampf, W.L. A Comprehensive Framework for Verification, Validation, and Uncertainty Quantification in Scientific Computing. Comput. Methods Appl. Mech. Eng. 2011, 200, 2131–2144. [Google Scholar] [CrossRef]
- Roy, C.J.; Balch, M.S. A Holistic Approach to Uncertainty Quantification with Application to Supersonic Nozzle Thrust. Int. J. Uncertain. Quantif. 2012, 2, 363–381. [Google Scholar] [CrossRef]
- Oberkampf, W.; Helton, J.; Sentz, K. Mathematical Representation of Uncertainty. In AIAA Applied Aerodynamics Conference; AIAA 2001-1645; American Institute of Aeronautics and Astronautics: Anaheim, CA, USA, 2001. [Google Scholar] [CrossRef]
- Oberkampf, W.L.; DeLand, S.M.; Rutherford, B.M.; Diegert, K.V.; Alvin, K.F. Error and Uncertainty in Modeling and Simulation. Reliab. Eng. Syst. Saf. 2002, 75, 333–357. [Google Scholar] [CrossRef]
- Schaefer, J.A.; Cary, A.W.; Duque, E.P.; Lawrence, S. Application of a CFD Uncertainty Quantification Framework for Industrial-Scale Aerodynamic Analysis. In AIAA Scitech 2019 Forum; AIAA 2019-1492; American Institute of Aeronautics and Astronautics: San Diego, CA, USA, 2019. [Google Scholar] [CrossRef]
- Wendorff, A.D.; Alonso, J.J.; Bieniawski, S.R. A Multi-Fidelity Approach to Quantification of Uncertainty in Stability and Control Databases for use in Stochastic Aircraft Simulations. In Proceedings of the 16th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Dallas, TX, USA, 22–26 June 2015; AIAA 2015-3439. American Institute of Aeronautics and Astronautics: Dallas, TX, USA, 2015. [Google Scholar] [CrossRef]
- Fidkowski, K.; Kroo, I.; Willcox, K.; Engelson, F. Stochastic Gust Analysis Techniques for Aircraft Conceptual Design. In Proceedings of the 12th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Victoria, BC, Canada, 10–12 September 2008; American Institute of Aeronautics and Astronautics: Victoria, BC, Canada, 2008. [Google Scholar] [CrossRef] [Green Version]
- Ng, L.W.T.; Willcox, K.E. Monte Carlo Information-Reuse Approach to Aircraft Conceptual Design Optimization Under Uncertainty. J. Aircr. 2016, 53, 427–438. [Google Scholar] [CrossRef]
- Steinkellner, S. Aircraft Vehicle Systems Modeling and Simulation under Uncertainty. Master’s Thesis, Linköping University Institute of Technology, Linköping, Sweden, 2011. [Google Scholar]
- Hale, L.E.; Patil, M.; Roy, C.J. Nondeterministic Simulation for Probability of Loss of Control Prediction for Unmanned Aircraft Systems. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Dallas, TX, USA, 22–26 June 2015. AIAA 2015-2329. [Google Scholar] [CrossRef]
- Hale, L.E.; Patil, M.; Roy, C.J. Aerodynamic Parameter Identification and Uncertainty Quantification for Small Unmanned Aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 5–9 January 2015; AIAA 2015-1538. American Institute of Aeronautics and Astronautics: Kissimmee, FL, USA, 2015. [Google Scholar] [CrossRef]
- Maine, R.E.; Iliff, K.W. The Theory and Practice of Estimating the Accuracy of Dynamic Flight-Determined Coefficients; NASA RP-1077; National Aeronautics and Space Administration: Washington, DC, USA, 1981. [Google Scholar]
- Stripling, H.; Adams, M.; McClarren, R.; Mallick, B. The Method of Manufactured Universes for Validating Uncertainty Quantification Methods. Reliab. Eng. Syst. Saf. 2011, 96, 1242–1256. [Google Scholar] [CrossRef]
- Jategaonkar, R.V. Flight Vehicle System Identification: A Time-Domain Methodology, 2nd ed.; Number 245 in Progress in Astronautics and Aeronautics; AIAA, American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2015. [Google Scholar]
- Montgomery, D.C. Design and Analysis of Experiments, 8th ed.; John Wiley & Sons, Inc: Hoboken, NJ, USA, 2013. [Google Scholar]
- Denham, C.L.; Patil, M.; Roy, C.J.; Alexandrov, N. Applicability of a Framework for Modeling Modified Aircraft Configurations Using Uncertainty. In Proceedings of the AIAA Aviation 2021 Forum, Virtual, 30 September 2021; AIAA 2021-2793. American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2021. [Google Scholar] [CrossRef]
- Denham, C.L.; Patil, M.; Roy, C.J. Estimating Uncertainty Bounds for Modified Configurations from an Aerodynamic Model of a Nominal Configuration. In Proceedings of the 2018 AIAA Atmospheric Flight Mechanics Conference, Kissimmee, FL, USA, 11 January 2018; AIAA 2018-1762. American Institute of Aeronautics and Astronautics: Kissimmee, FL, USA, 2018. [Google Scholar] [CrossRef]
- Jordan, T.; Langford, W.; Hill, J. Airborne Subscale Transport Aircraft Research Testbed-Aircraft Model Development. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005; AIAA 2005-6432. American Institute of Aeronautics and Astronautics: San Francisco, CA, USA, 2005. [Google Scholar] [CrossRef]
- Jordan, T.; Langford, W.; Belcastro, C.; Foster, J.; Shah, G.; Howland, G.; Kidd, R. Development of a Dynamically Scaled Generic Transport Model Testbed for Flight Research Experiments. In Proceedings of the AUVSI Unmanned Unlimited, Chicago, IL, USA, 20–23 September 2004. [Google Scholar]
- Murch, A.; Foster, J. Recent NASA Research on Aerodynamic Modeling of Post-Stall and Spin Dynamics of Large Transport Airplanes. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007; AIAA 2007-463. American Institute of Aeronautics and Astronautics: Reno, NV, USA, 2007. [Google Scholar] [CrossRef]
- Cunningham, K.; Cox, D.; Murri, D.; Riddick, S. A Piloted Evaluation of Damage Accommodating Flight Control Using a Remotely Piloted Vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011; AIAA 2011-6451. American Institute of Aeronautics and Astronautics: Portland, OR, USA, 2011. [Google Scholar] [CrossRef] [Green Version]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Trim Value |
|---|---|
| u | 50.2 m/s |
| v | 0 m/s |
| w | 2.59 m/s |
| p | 0 rad/s |
| q | 0 rad/s |
| r | 0 rad/s |
| 0 rad (0 deg) | |
| 0.05 rad (2.86 deg) | |
| Deflection | Trim Value |
| 2.45 deg | |
| 0 deg | |
| −0.39 deg | |
| 40.6% |
| Modification | Tuned Model Method | Baseline Model Method |
|---|---|---|
| 10% Increase in Mass | 94% | — |
| 10% Increase in Mass and Change In CG | 77% | 98% |
| 10% Increase in Mass and Large Change In CG | 19% | 21% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 United States Government as represented by the Administrator of the National Aeronautics and Space Administration and by Mayuresh Patil and Christopher J. Roy. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Denham, C.L.; Patil, M.; Roy, C.J.; Alexandrov, N. Framework for Estimating Performance and Associated Uncertainty for Modified Aircraft Configurations. Aerospace 2022, 9, 490. https://doi.org/10.3390/aerospace9090490
Denham CL, Patil M, Roy CJ, Alexandrov N. Framework for Estimating Performance and Associated Uncertainty for Modified Aircraft Configurations. Aerospace. 2022; 9(9):490. https://doi.org/10.3390/aerospace9090490
Chicago/Turabian StyleDenham, Casey L., Mayuresh Patil, Christopher J. Roy, and Natalia Alexandrov. 2022. "Framework for Estimating Performance and Associated Uncertainty for Modified Aircraft Configurations" Aerospace 9, no. 9: 490. https://doi.org/10.3390/aerospace9090490