
Design and Analysis of MataMorph-3: A Fully Morphing UAV with Camber-Morphing Wings and Tail Stabilizers

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
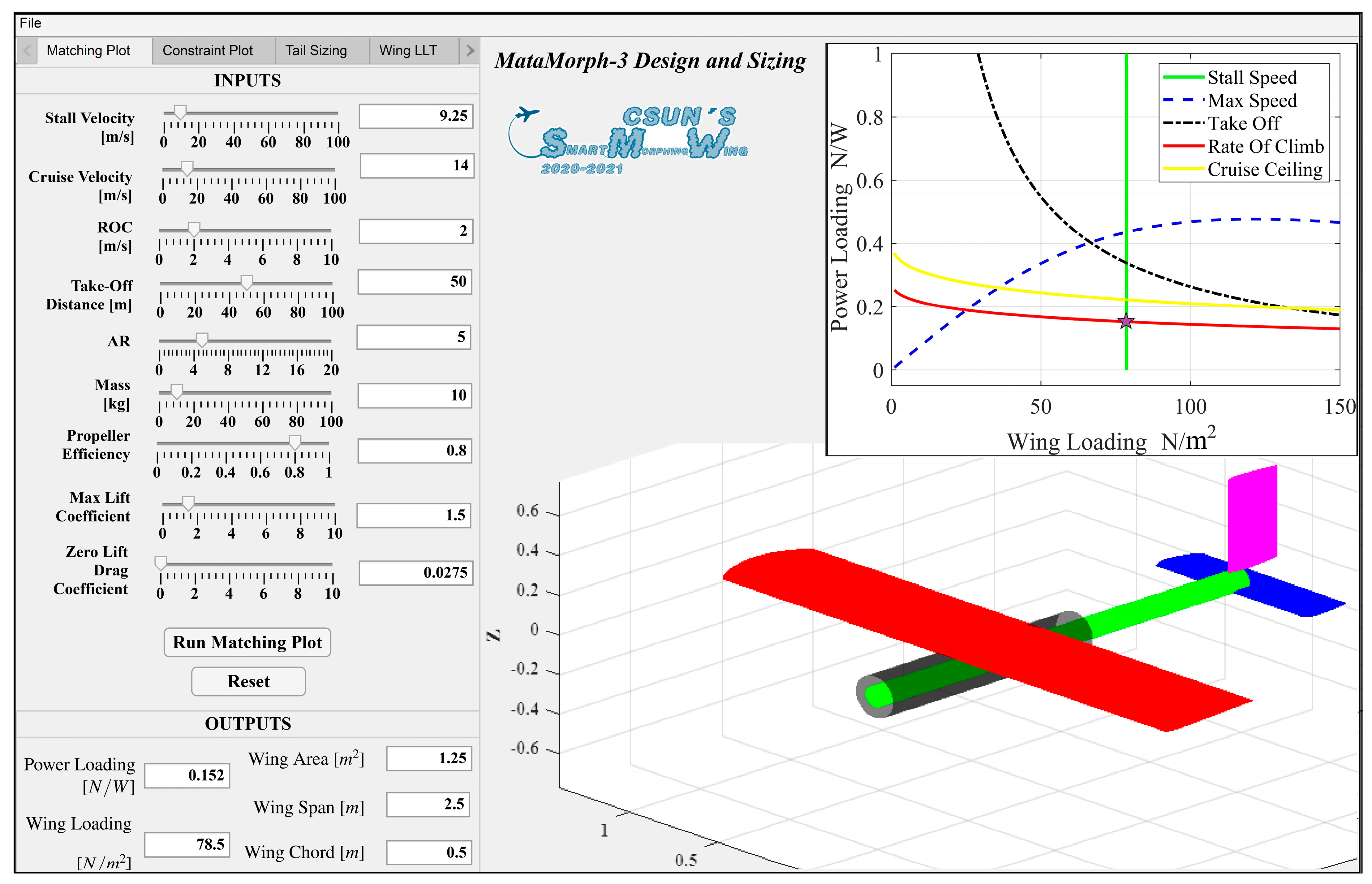
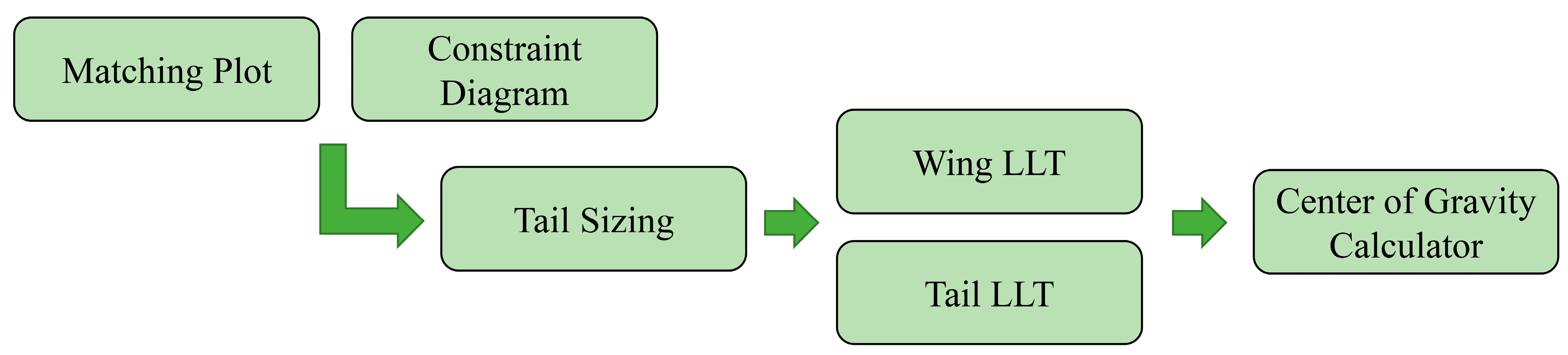
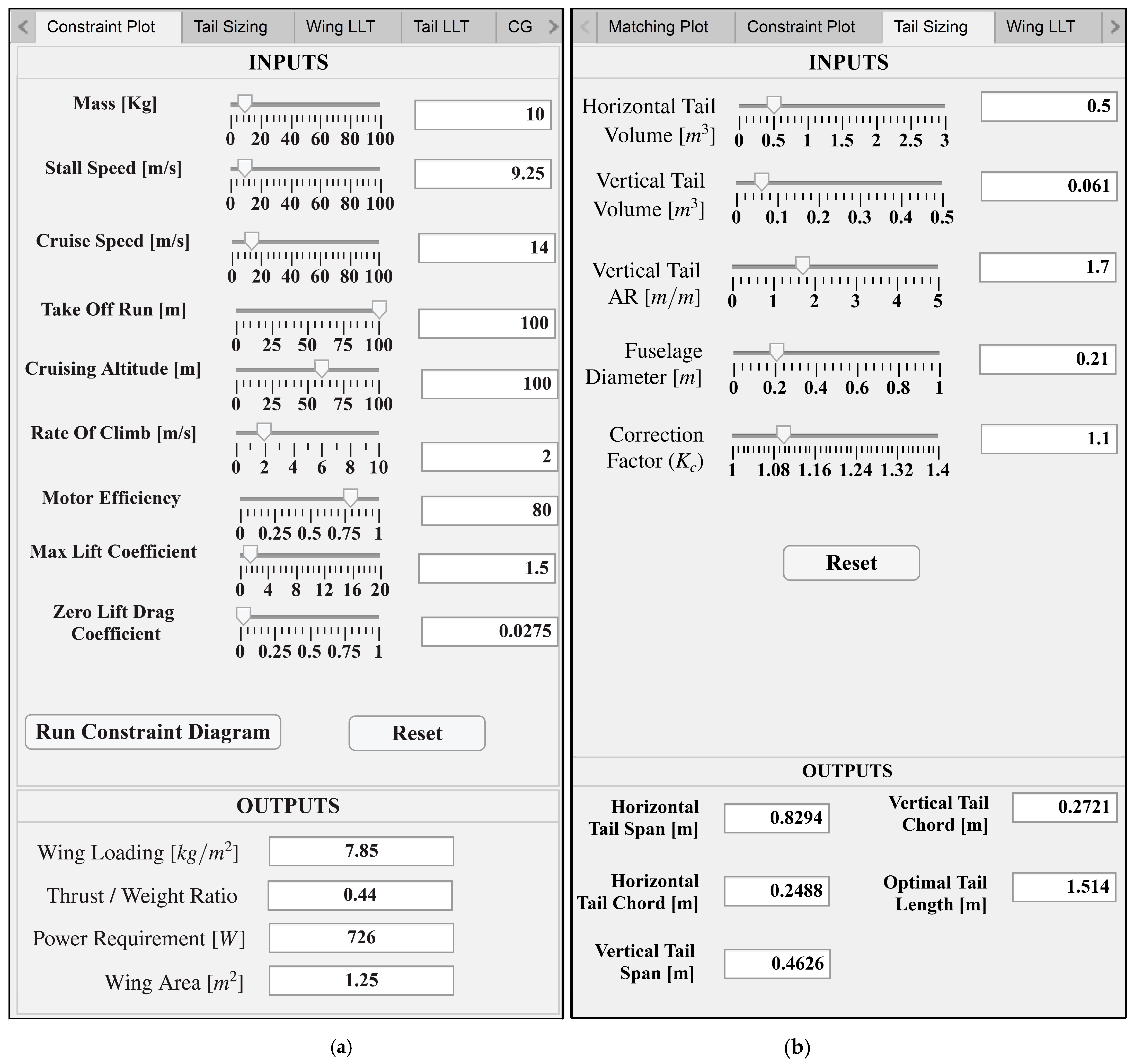
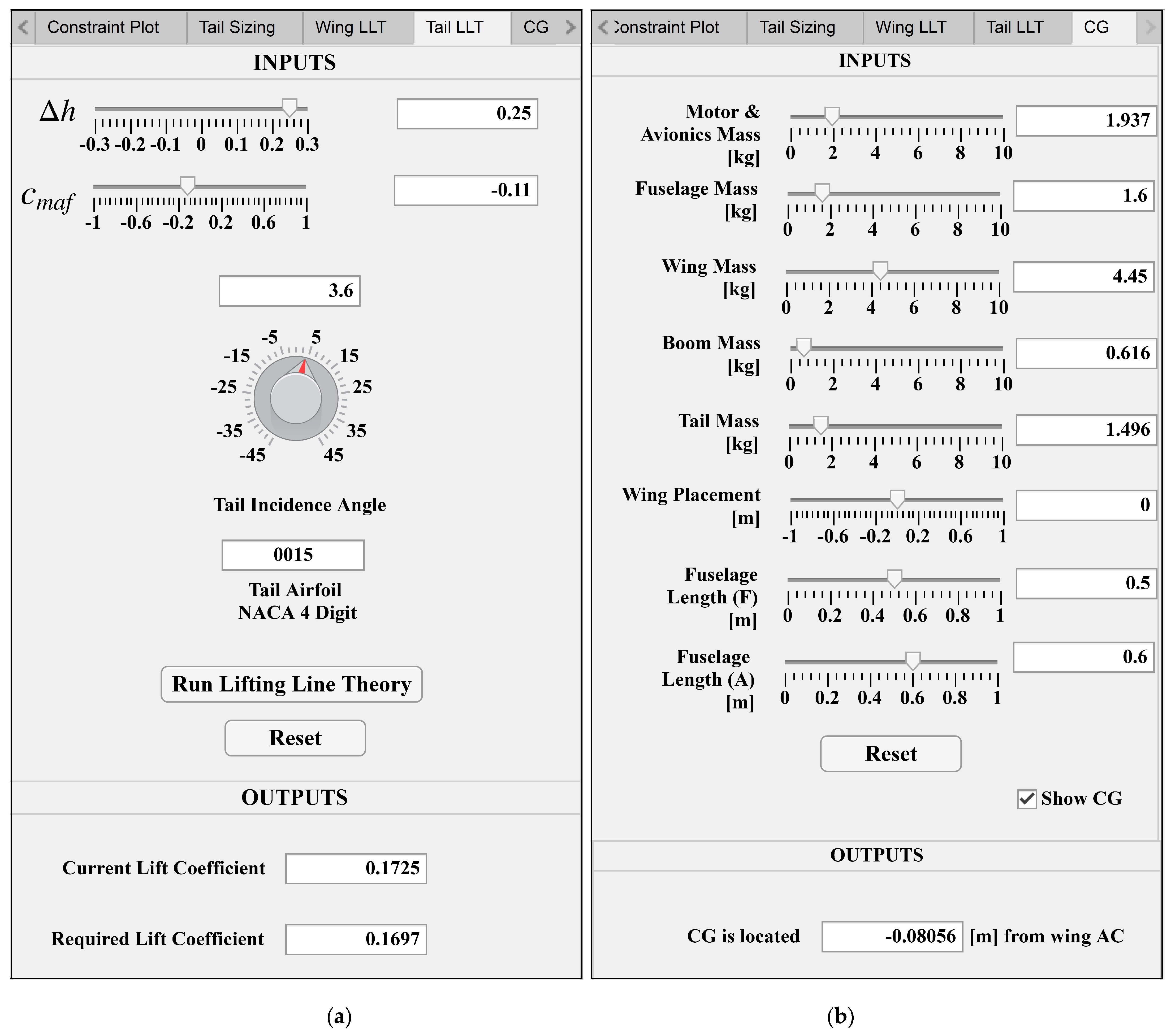
2.1. Preliminary Design and Sizing
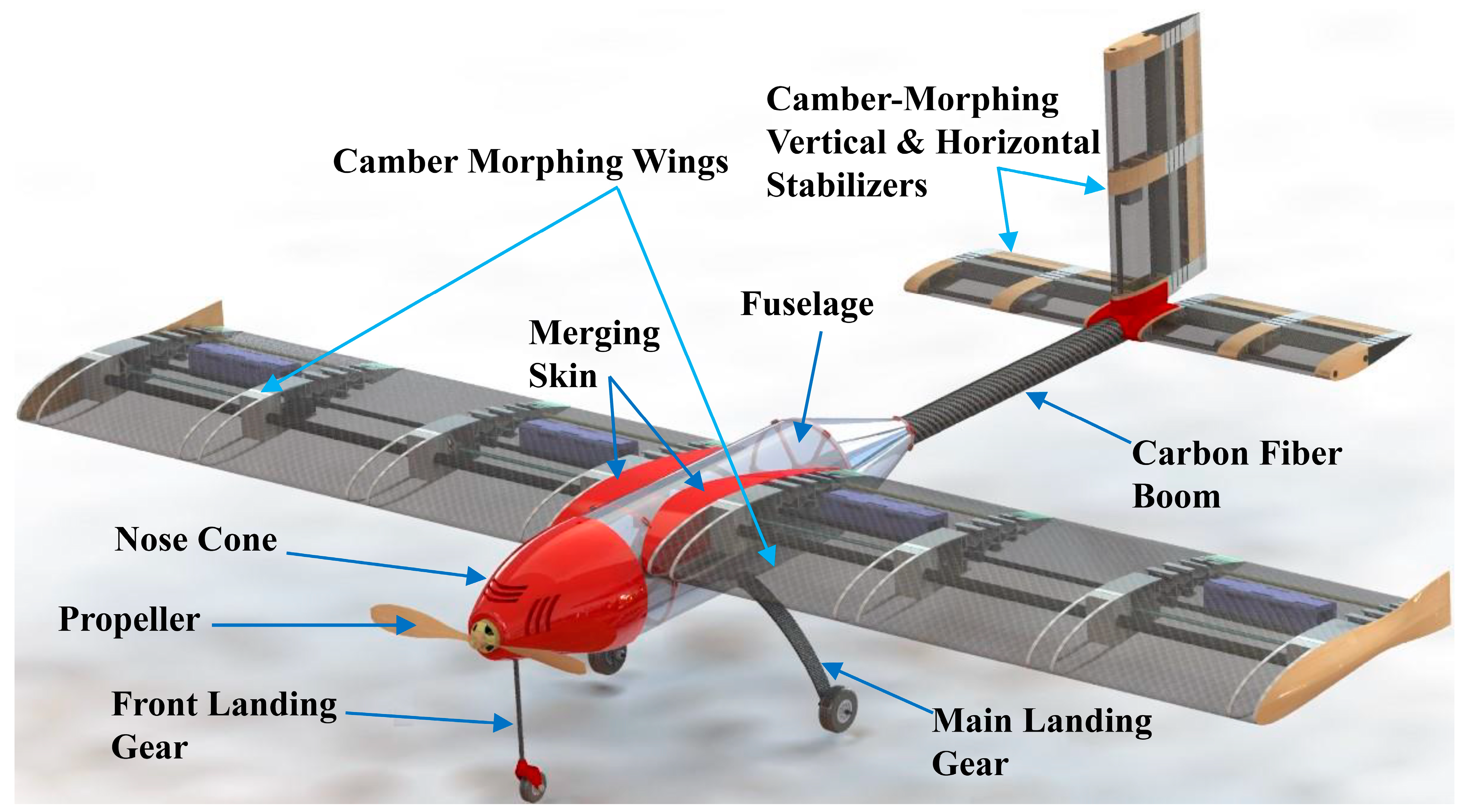
2.2. Model Description
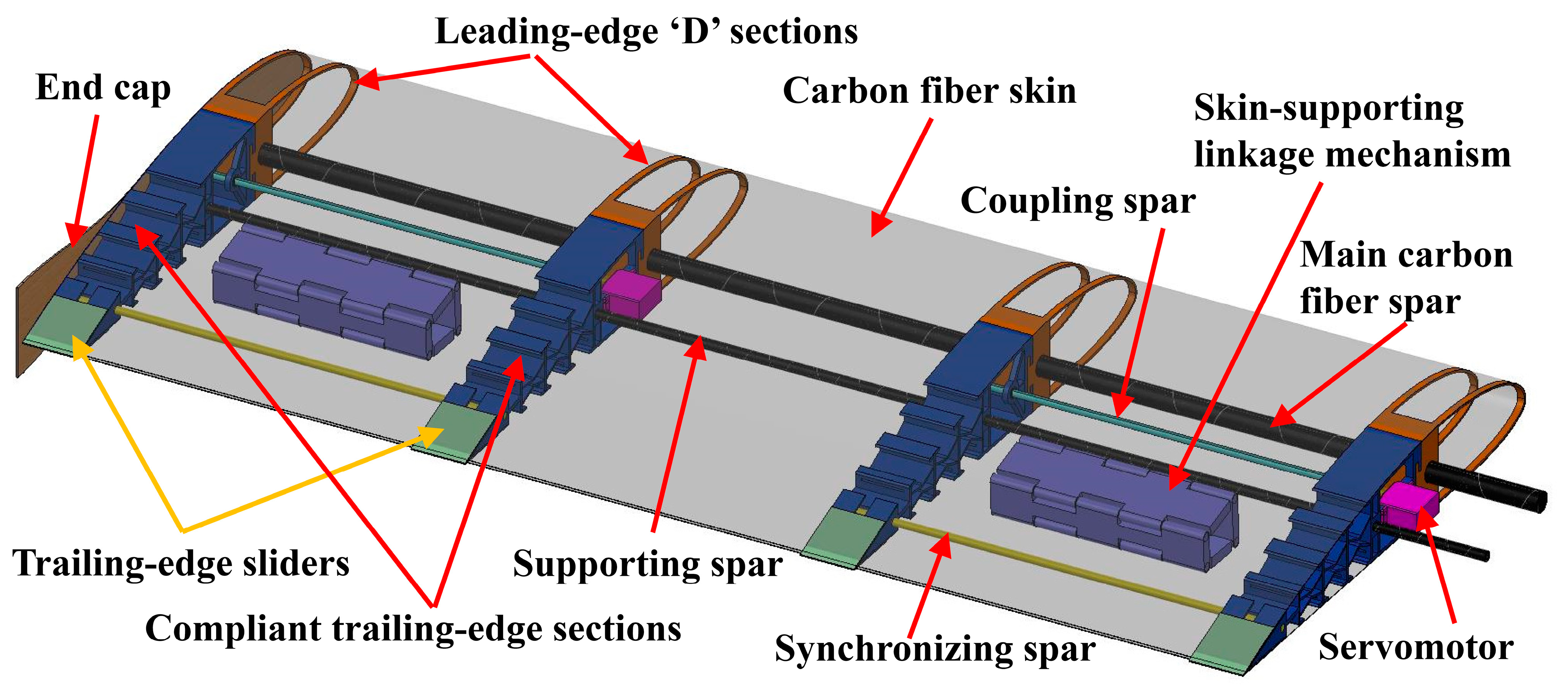
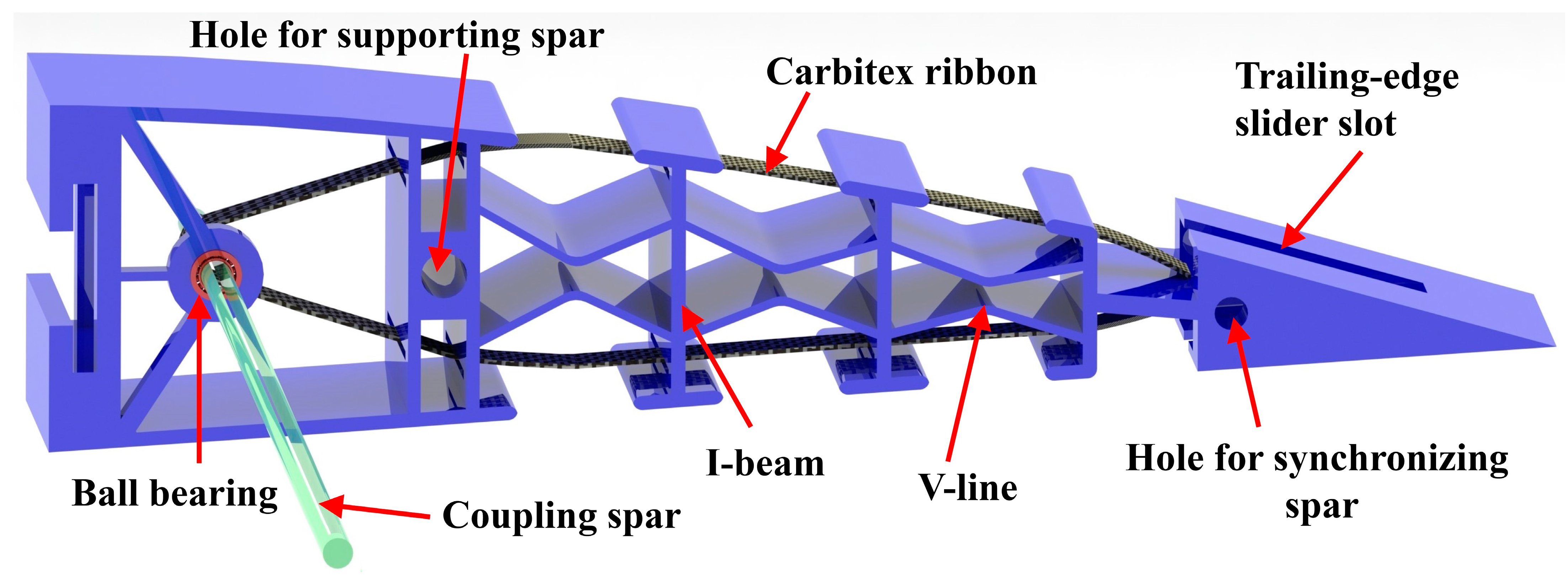
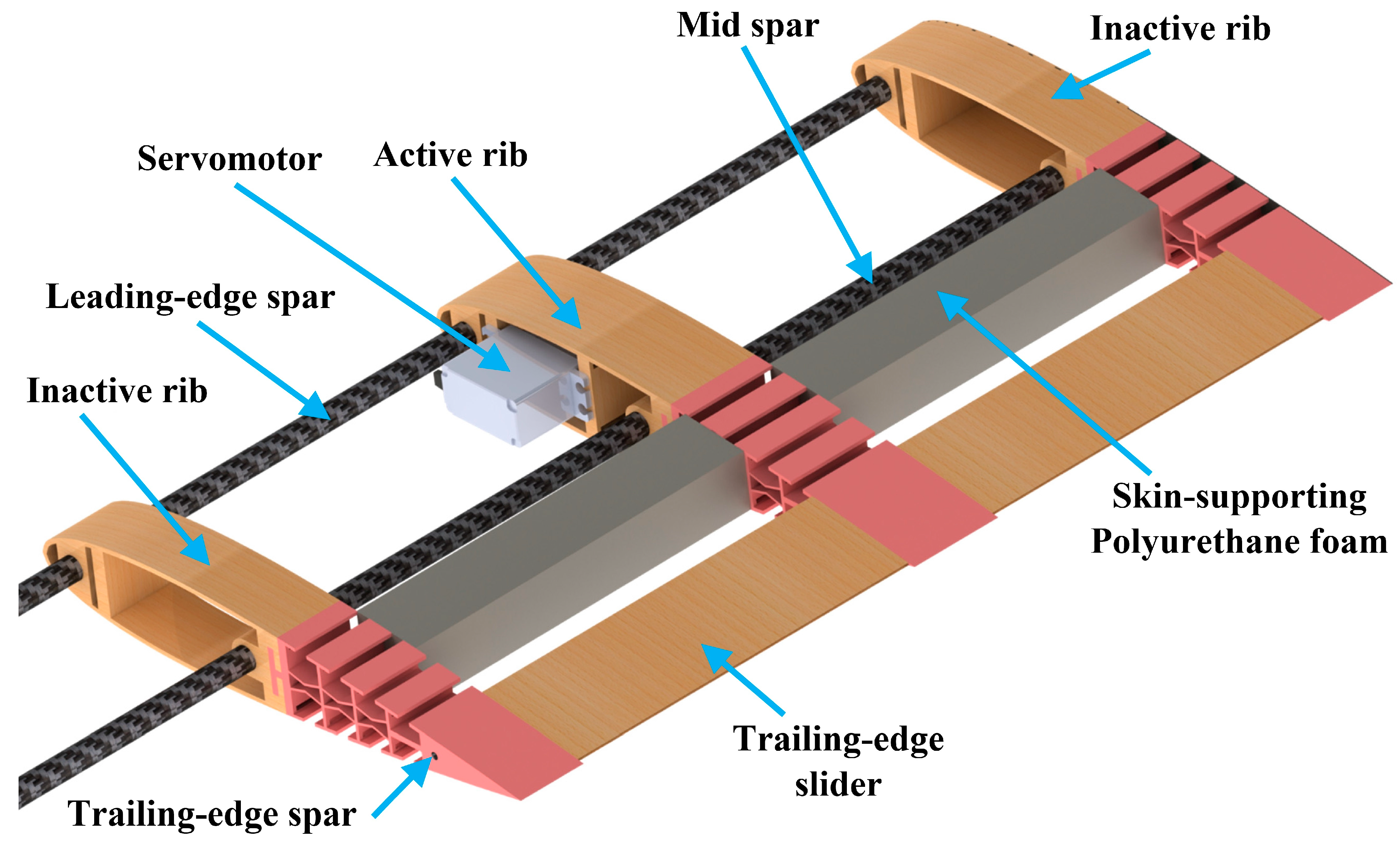
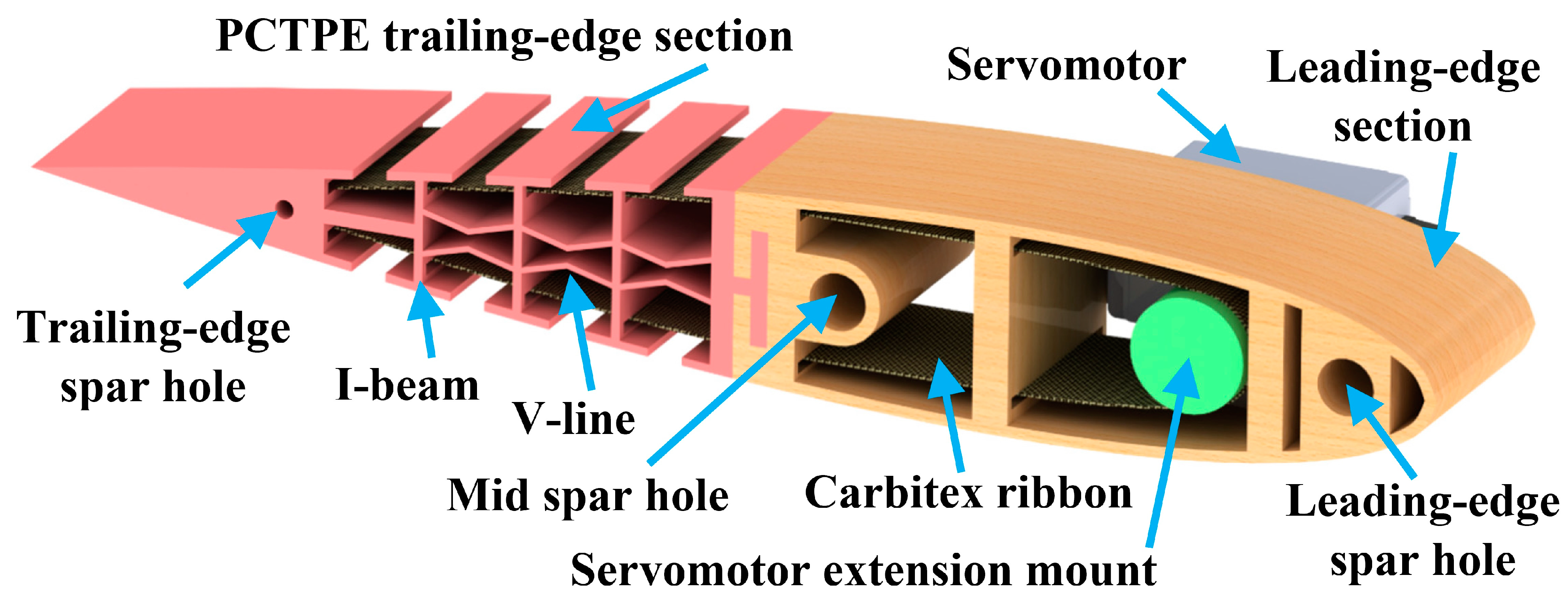
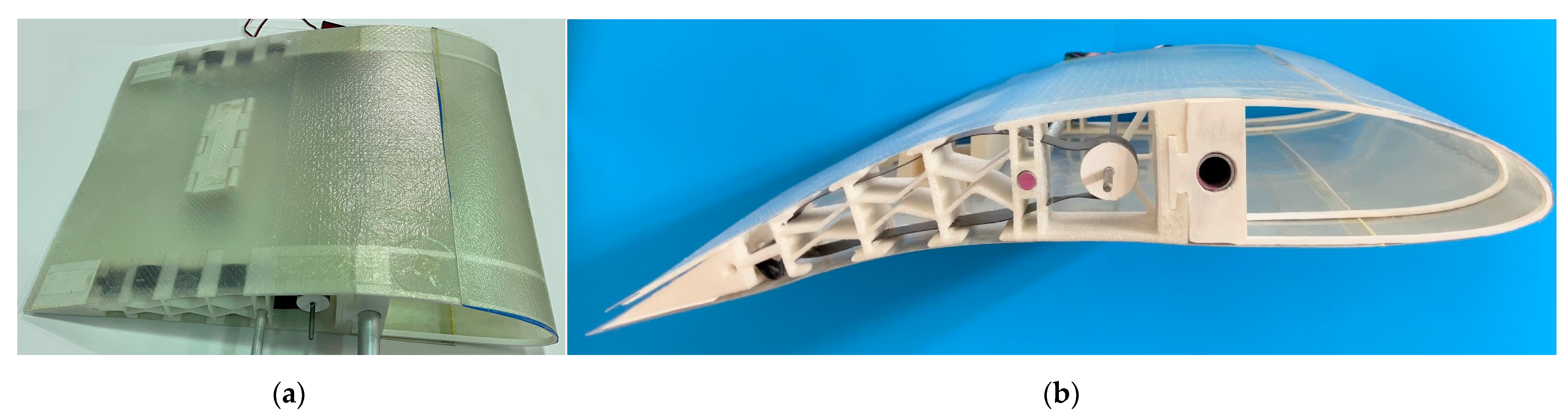
2.2.1. Wing Design
2.2.2. Empennage Design
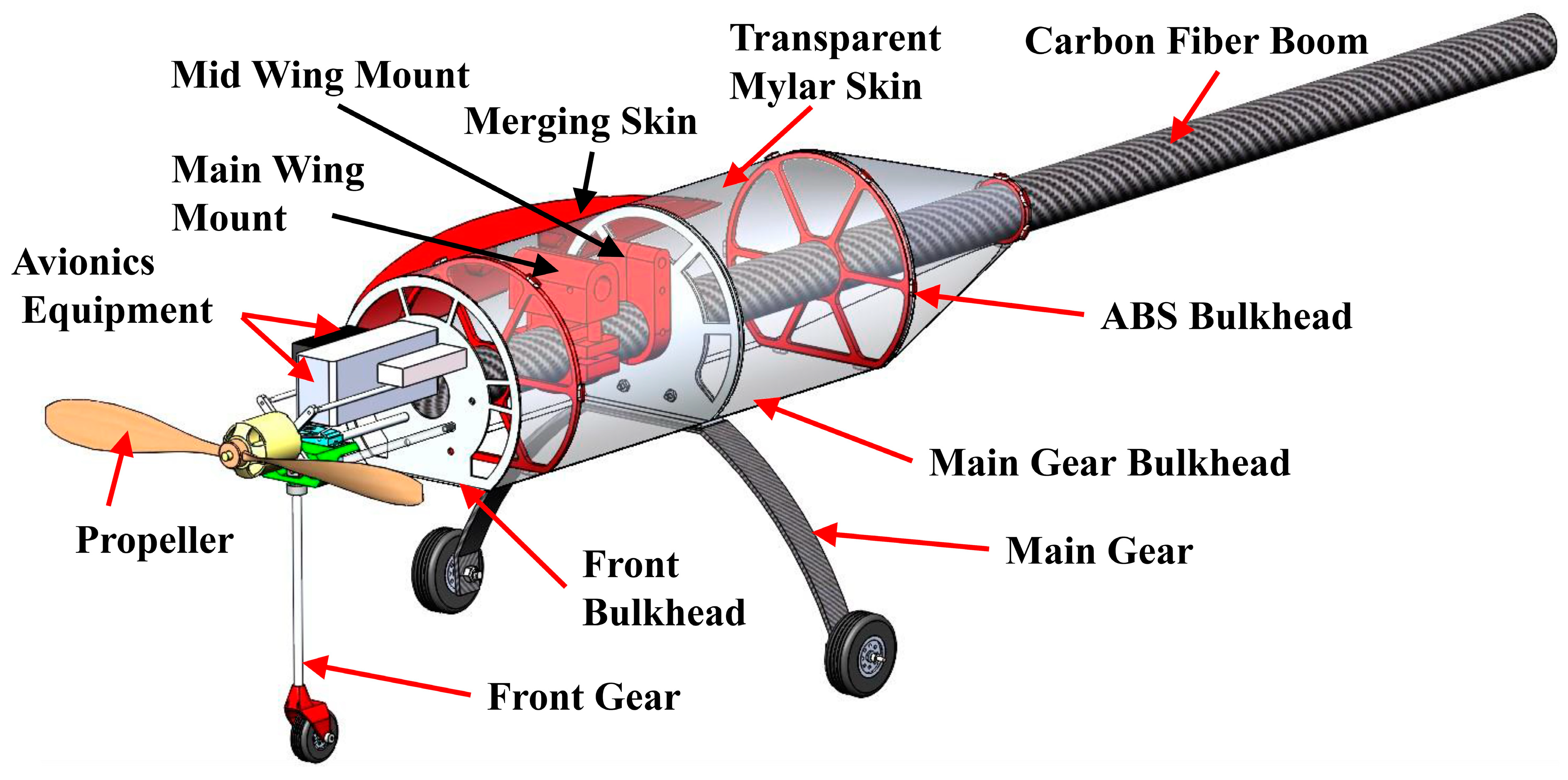
2.2.3. Fuselage Design
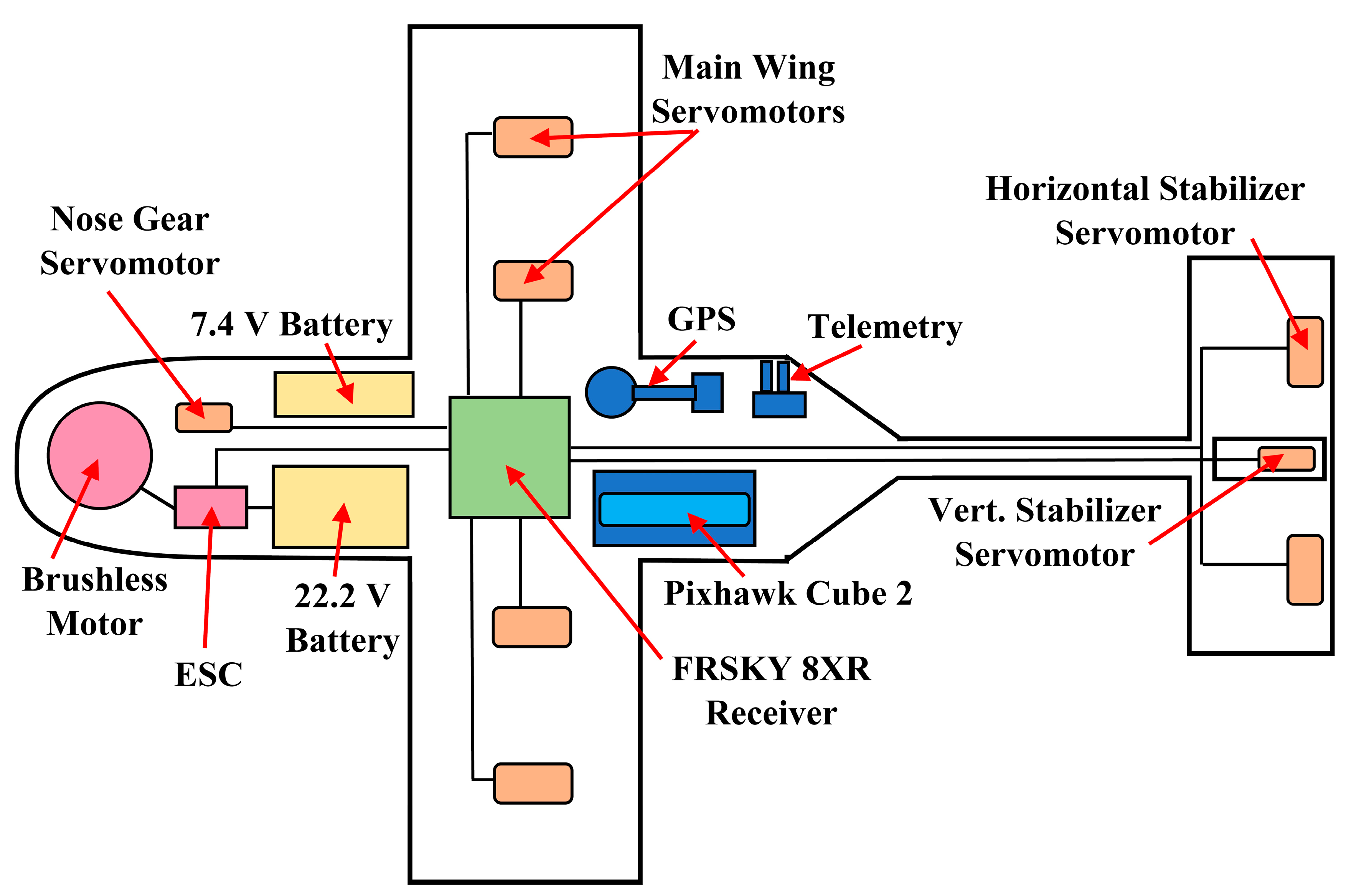
2.2.4. Avionics and Propulsion
3. Results and Discussion
3.1. Finite Element Analysis (FEA) Studies
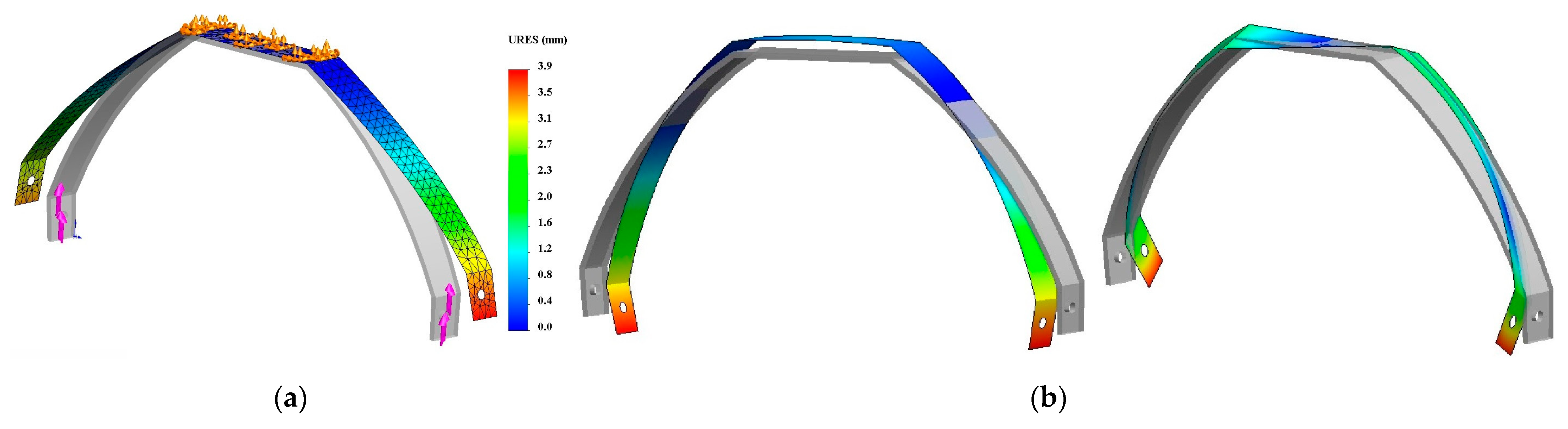
3.1.1. Landing Gear Frame
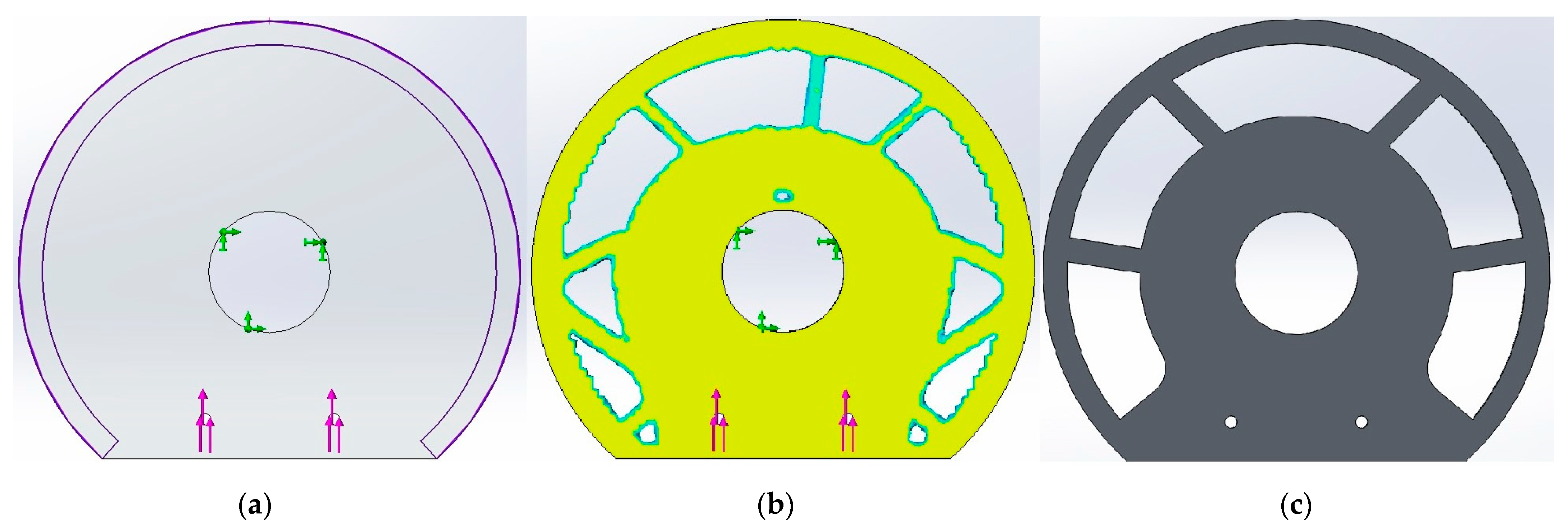
3.1.2. Bulkheads
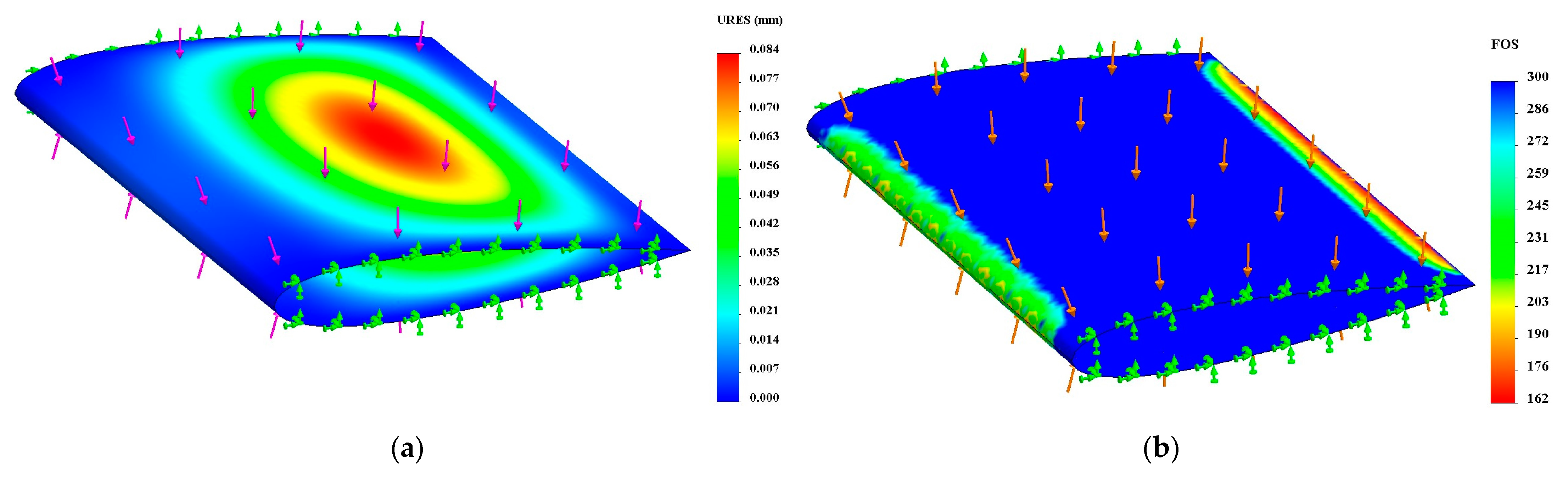
3.1.3. Carbon Fiber Skin
3.1.4. Carbon Fiber Spars
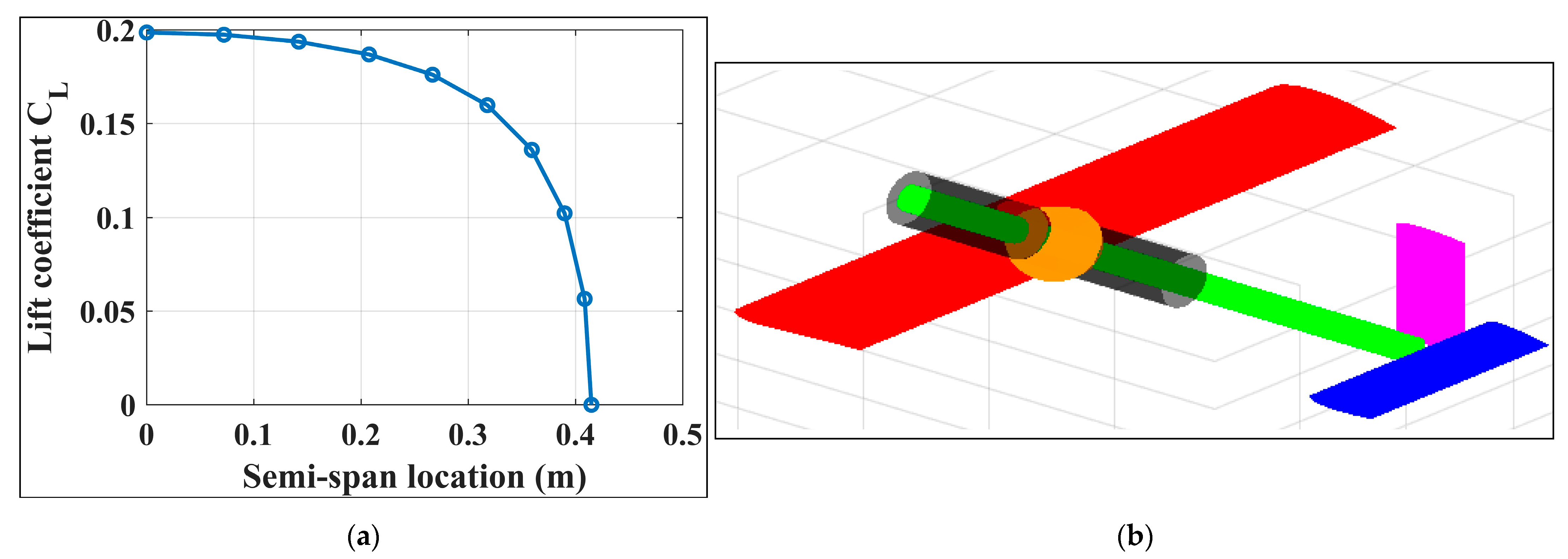
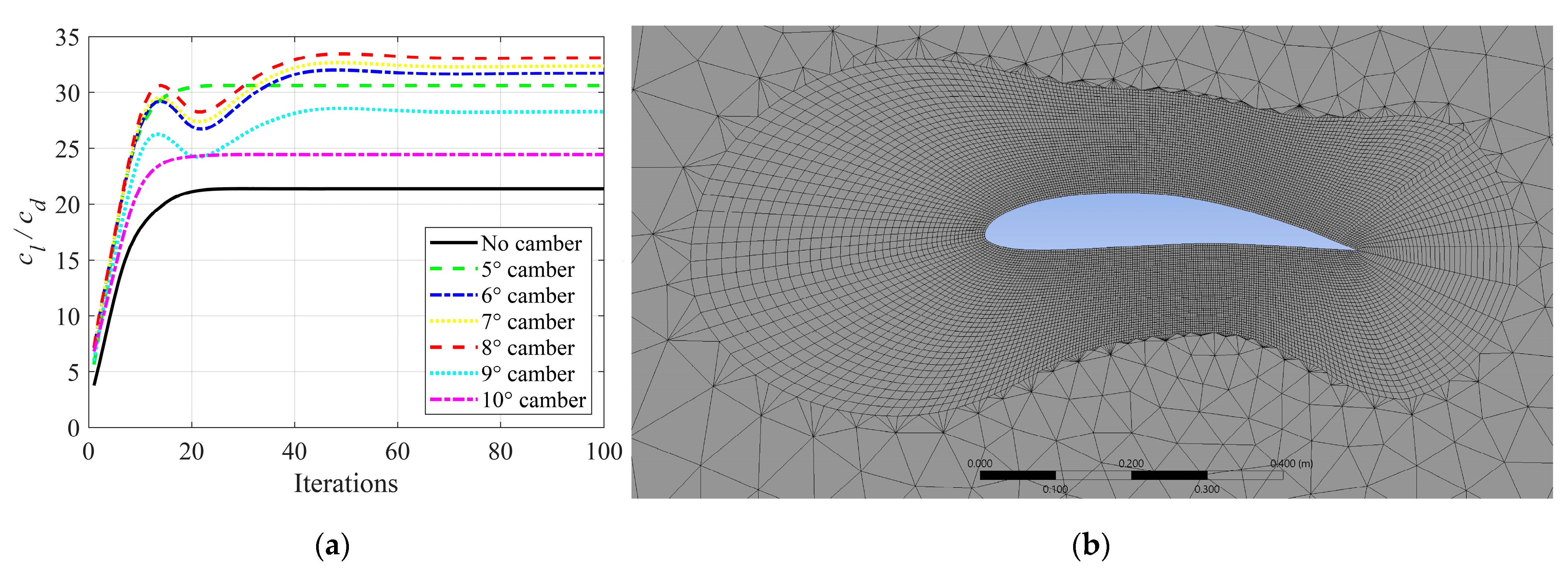
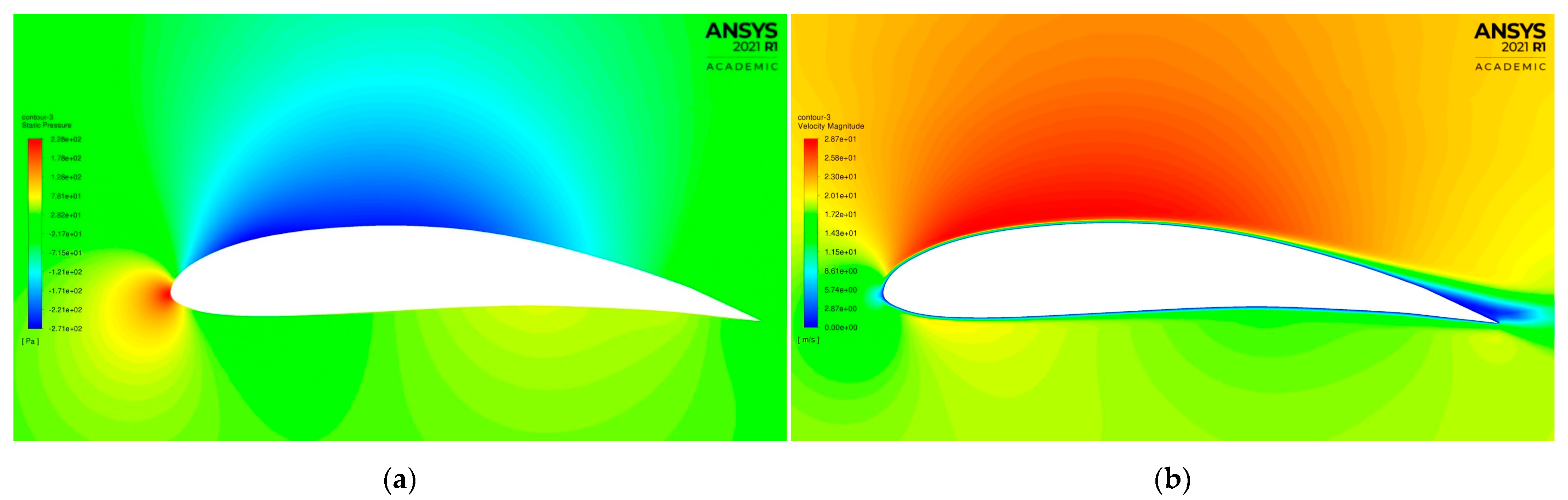
3.2. Computational Fluid Dynamics (CFD) Studies
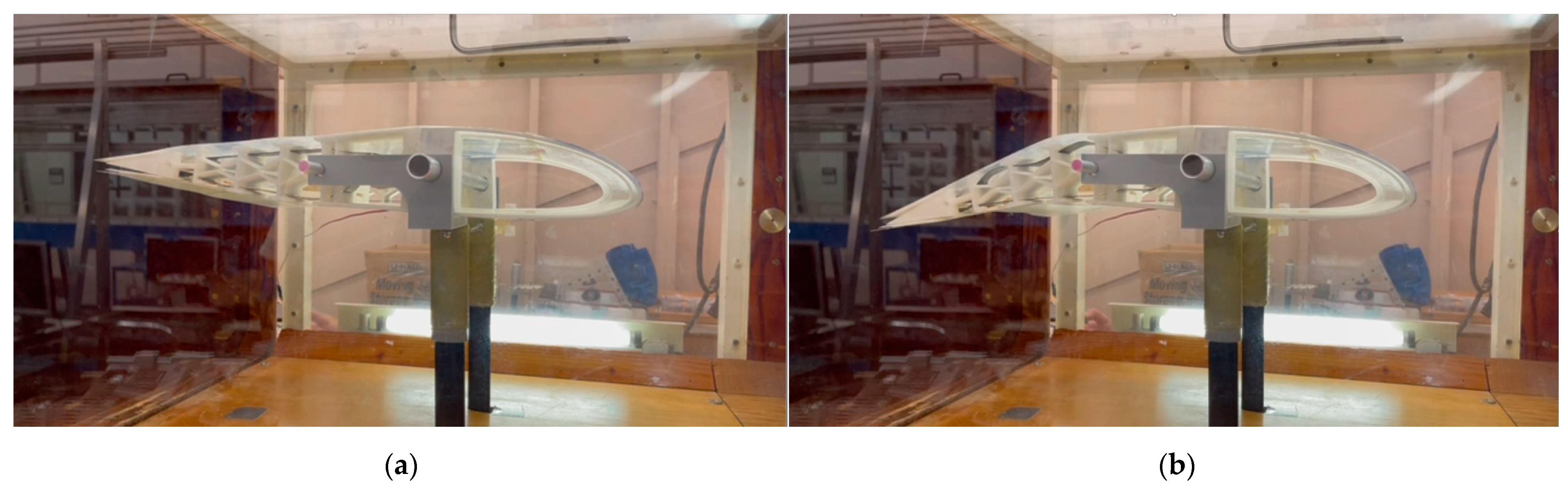
3.3. Proof-of-Concept Testing
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Valasek, J. Morphing Aerospace Vehicles and Structures, 2nd ed.; John Wiley & Sons: Chichester, UK, 2012. [Google Scholar]
- Spillman, J.J. The use of variable camber to reduce drag, weight and costs of transport aircraft. Aeronaut. J. 1992, 96, 1–9. [Google Scholar] [CrossRef]
- Barbarino, S.; Bilgen, O.; Ajaj, R.M.; Friswell, M.I.; Inman, D.J. A review of morphing aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Gomez, J.C.; Garcia, E. Morphing unmanned aerial vehicles. Smart Mater. Struct. 2011, 20, 103001. [Google Scholar] [CrossRef]
- Amendola, G.; Dimino, I.; Magnifico, M.; Pecora, R. Distributed actuation concepts for a morphing aileron device. Aeronaut. J. 2016, 120, 1365–1385. [Google Scholar] [CrossRef]
- Li, D.; Zhao, S.; Da Ronch, A.; Xiang, J.; Drofelnik, J.; Li, Y.; Zhang, L.; Wu, Y.; Kintscher, M.; Monner, H.P.; et al. A review of modelling and analysis of morphing wings. Prog. Aerosp. Sci. 2018, 100, 46–62. [Google Scholar] [CrossRef] [Green Version]
- Tidwell, Z.; Joshi, S.; Crossley, W.; Ramakrishnan, S. Comparison of morphing wing strategies based upon aircraft performance impacts. In Proceedings of the 45th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference, Palm Springs, CA, USA, 19–22 April 2004; p. 1722. [CrossRef] [Green Version]
- Bishay, P.L.; Burg, E.; Akinwunmi, A.; Phan, R.; Sepulveda, K. Development of a new span-morphing wing core design. Designs 2019, 3, 12. [Google Scholar] [CrossRef] [Green Version]
- Ajaj, R.M.; Jankee, G.K. The Transformer aircraft: A multimission unmanned aerial vehicle capable of symmetric and asymmetric span morphing. Aerosp. Sci. Technol. 2018, 76, 512–522. [Google Scholar] [CrossRef] [Green Version]
- Schlup, A.; Bishay, P.L.; Mclennan, T.; Barajas, C.; Talbian, B.; Thatcher, G.; Flores, R.; Perez-Norwood, J.; Torres, C.; Kibert, K.; et al. MataMorph 2: A new experimental UAV with twist-morphing wings and camber-morphing tail stabilizers. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–15 & 19–21 January 2021; p. 584. [Google Scholar] [CrossRef]
- Parancheerivilakkathil, M.S.; Haider, Z.; Ajaj, R.M.; Amoozgar, M. A polymorphing wing capable of span extension and variable pitch. Aerospace 2022, 9, 205. [Google Scholar] [CrossRef]
- Fasel, U.; Keidel, D.; Baumann, L.; Cavolina, G.; Eichenhofer, M.; Ermanni, P. Composite additive manufacturing of morphing aerospace structures. Manuf. Lett. 2020, 23, 85–88. [Google Scholar] [CrossRef]
- Cees, B.; Massey, K.; Abdullah, E.J. Wing morphing control with shape memory alloy actuators. J. Intell. Mater. Syst. Struct. 2013, 24, 879–898. [Google Scholar] [CrossRef]
- Majid, T.; Jo, B.W. Comparative aerodynamic performance analysis of camber morphing and conventional Airfoils. Appl. Sci. 2021, 11, 10663. [Google Scholar] [CrossRef]
- Joo, J.J.; Marks, C.R.; Zientarski, L.; Culler, A.J. Variable camber compliant wing-design. In Proceedings of the 23rd AIAA/AHS Adaptive Structures Conference, Kissimmee, FL, USA, 5–9 January 2015; p. 1050. [Google Scholar] [CrossRef]
- Bishay, P.L.; Finden, R.; Aslanpour, D.; Lopez, E.; Alas, C.; Recinos, S.; Flores, D.; Gonzalez, E.; Popa, R. Development of an SMA-based camber morphing UAV tail core design. Smart Mater. Struct. 2019, 28, 075024. [Google Scholar] [CrossRef]
- Fincham, J.; Friswell, M. Aerodynamic optimisation of a camber morphing aerofoil. Aerosp. Sci. Technol. 2015, 43, 245–255. [Google Scholar] [CrossRef] [Green Version]
- Yokozeki, T.; Sugiura, A.; Hirano, Y. Development and wind tunnel test of variable camber morphing wing. In Proceedings of the 22nd AIAA/ASME/AHS Adaptive Structures Conference, National Harbor, MD, USA, 13–17 January 2014; p. 1261. [Google Scholar] [CrossRef]
- Woods, B.K.S.; Friswell, M.I. Preliminary investigation of a fishbone active camber concept. Smart Mater. Adapt. Struct. Intell. Syst. Am. Soc. Mech. Eng. 2012, 45103, 555–563. [Google Scholar] [CrossRef]
- Jo, B.W.; Majid, T. Aerodynamic analysis of camber morphing airfoils in transition via computational fluid dynamics. Biomimetics 2022, 7, 52. [Google Scholar] [CrossRef]
- Ott, V.; Keidel, D.; Kölbl, M.; Ermanni, P. Investigation of an adaptive, hinge-less, and highly shear stiff structure for morphing skins. J. Intell. Mater. Syst. Struct. 2020, 31, 445–456. [Google Scholar] [CrossRef]
- Chanzy, Q.; Keane, A.J. Analysis and experimental validation of morphing UAV wings. Aeronaut. J. 2018, 122, 390–408. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, D.; Ajaj, R.M. Multiaxial mechanical characterization of latex skin for morphing wing application. Polym. Test. 2022, 106, 107408. [Google Scholar] [CrossRef]
- Thill, C.L.; Etches, J.; Bond, I.; Potter, K.; Weaver, P. Morphing skins. Aeronaut. J. 2008, 112, 117–139. [Google Scholar] [CrossRef]
- Rediniotis, O.K.; Wilson, L.N.; Lagoudas, D.C.; Khan, M.M. Development of a shape-memory-alloy actuated biomimetic hydrofoil. J. Intell. Mater. Syst. Struct. 2002, 13, 35–49. [Google Scholar] [CrossRef]
- Yu, A.; Xi, F.; Moosavian, A.; Li, B. Design of a sliding morphing skin with segmented rigid panels. J. Aircr. 2018, 55, 1985–1994. [Google Scholar] [CrossRef]
- Yu, A.; Xi, F.; Ghaemi, H.; Li, B. Modeling of a complete morphing mechanism covered by a paneled morphing skin. J. Mech. Robot. 2021, 13, 021003. [Google Scholar] [CrossRef]
- Fereidooni, A.; Marchwica, J.; Leung, N.; Mangione, J.; Wickramasinghe, V. Development of a hybrid (rigid-flexible) morphing leading-edge equipped with bending and extending capabilities. J. Intell. Mater. Syst. Struct. 2020, 32, 1024–1037. [Google Scholar] [CrossRef]
- Sadraey, M.H. Aircraft Design: A Systems Engineering Approach; John Wiley & Sons: Chichester, UK, 2013. [Google Scholar]
- Glīzde, N. Wing and engine sizing by using the matching plot technique. Transp. Aerosp. Eng. 2017, 5, 48–59. [Google Scholar] [CrossRef] [Green Version]
- Keane, A.; Sóbester, A.; Scanlan, J. Small Unmanned Fixed-Wing Aircraft Design: A Practical Approach; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Available online: https://www.carbitex.com/ (accessed on 1 July 2022).
- Spera, A.D. Models of lift and drag coefficients of stalled and unstalled airfoils in wind turbines and wind tunnels. Available online: https://ntrs.nasa.gov/api/citations/20090001311/downloads/20090001311.pdf (accessed on 9 June 2022).




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bishay, P.L.; Kok, J.S.; Ferrusquilla, L.J.; Espinoza, B.M.; Heness, A.; Buendia, A.; Zadoorian, S.; Lacson, P.; Ortiz, J.D.; Basilio, R.; et al. Design and Analysis of MataMorph-3: A Fully Morphing UAV with Camber-Morphing Wings and Tail Stabilizers. Aerospace 2022, 9, 382. https://doi.org/10.3390/aerospace9070382
Bishay PL, Kok JS, Ferrusquilla LJ, Espinoza BM, Heness A, Buendia A, Zadoorian S, Lacson P, Ortiz JD, Basilio R, et al. Design and Analysis of MataMorph-3: A Fully Morphing UAV with Camber-Morphing Wings and Tail Stabilizers. Aerospace. 2022; 9(7):382. https://doi.org/10.3390/aerospace9070382
Chicago/Turabian StyleBishay, Peter L., James S. Kok, Luis J. Ferrusquilla, Brian M. Espinoza, Andrew Heness, Antonio Buendia, Sevada Zadoorian, Paul Lacson, Jonathan D. Ortiz, Ruiki Basilio, and et al. 2022. "Design and Analysis of MataMorph-3: A Fully Morphing UAV with Camber-Morphing Wings and Tail Stabilizers" Aerospace 9, no. 7: 382. https://doi.org/10.3390/aerospace9070382