
Shape Optimisation of Assembled Plate Structures with the Boundary Element Method



Abstract
:1. Introduction
2. Methodology
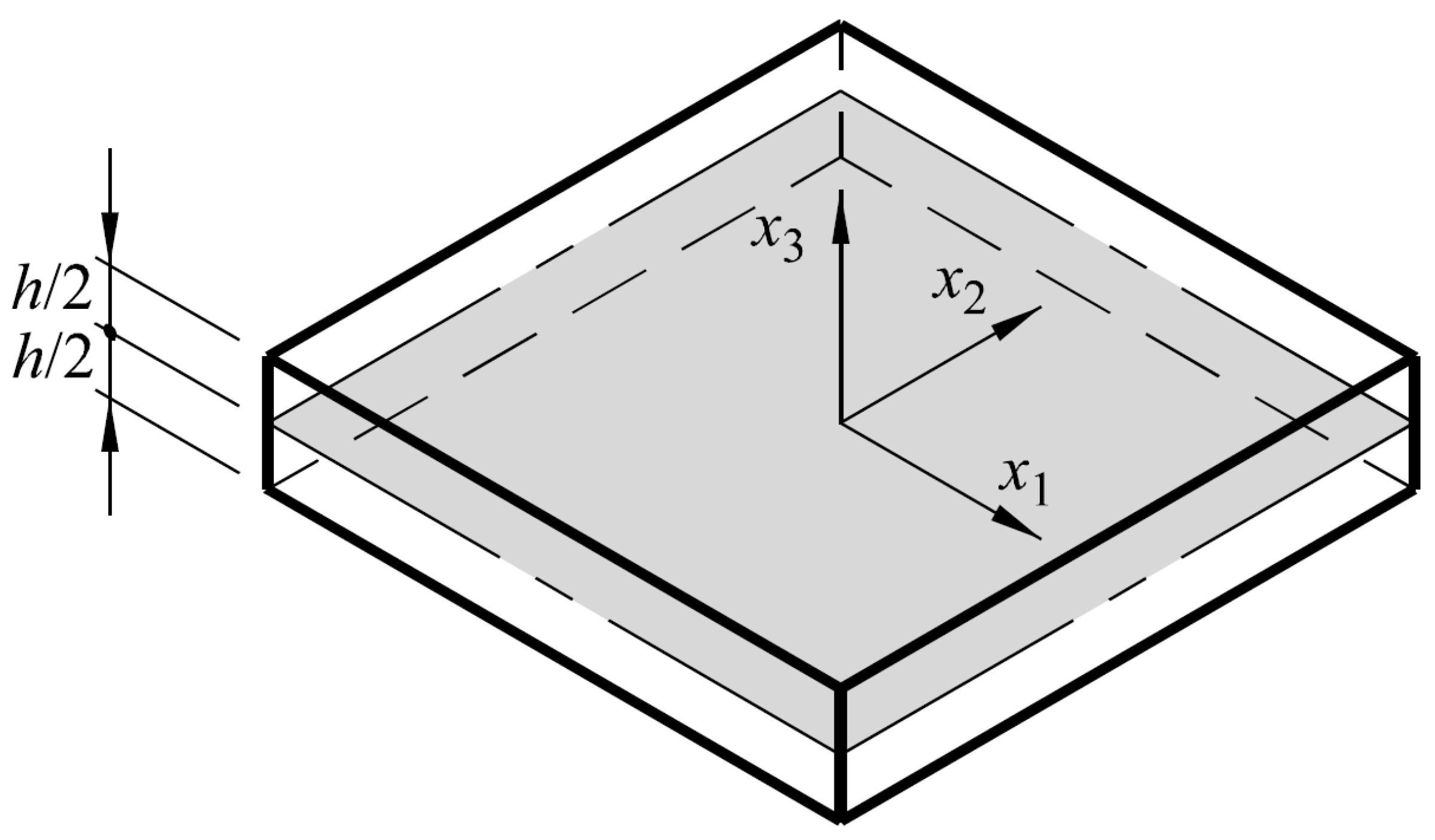
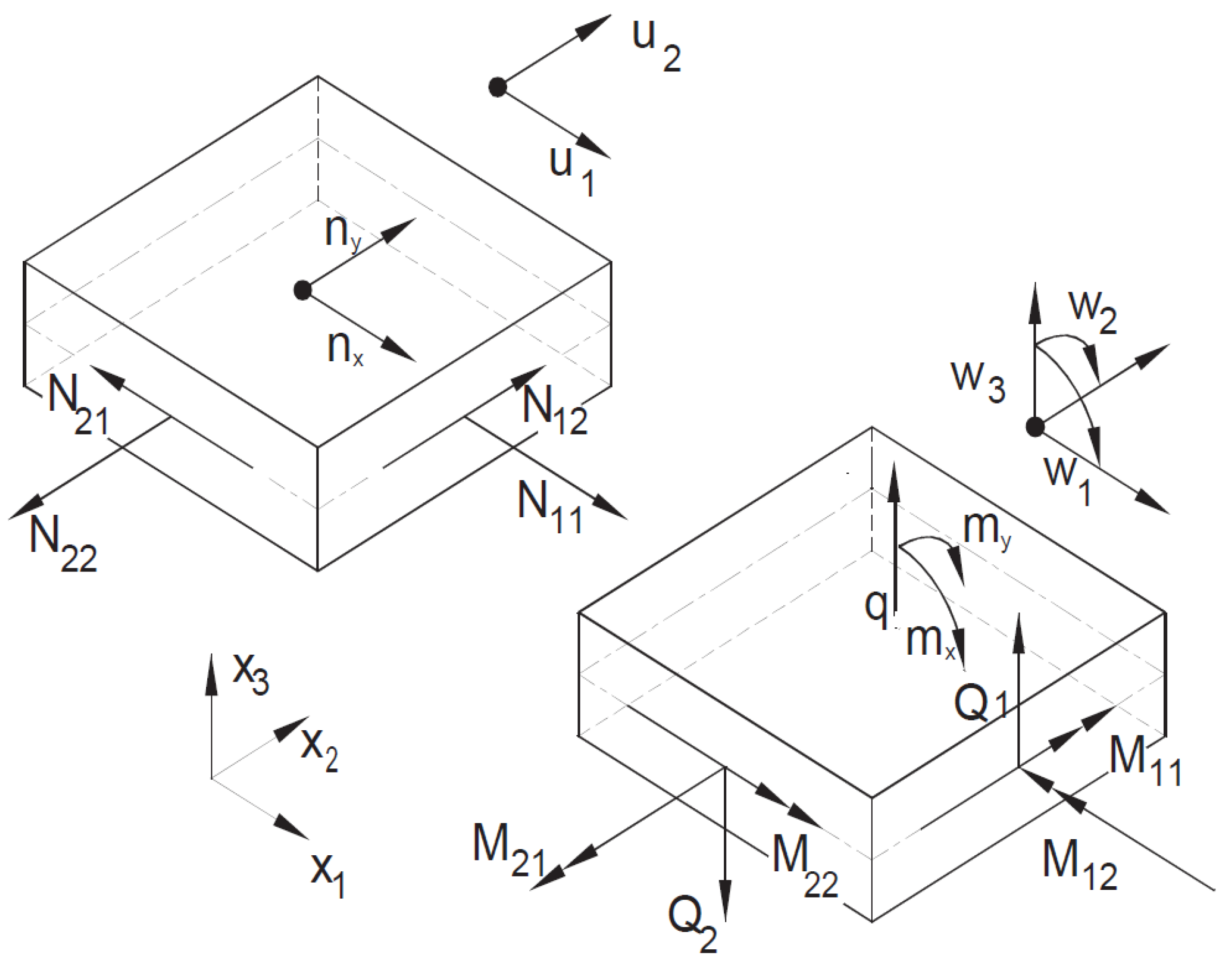
2.1. Plate Theory Notation in the Boundary Element Method
2.2. The Boundary Element Method for Plate Structures
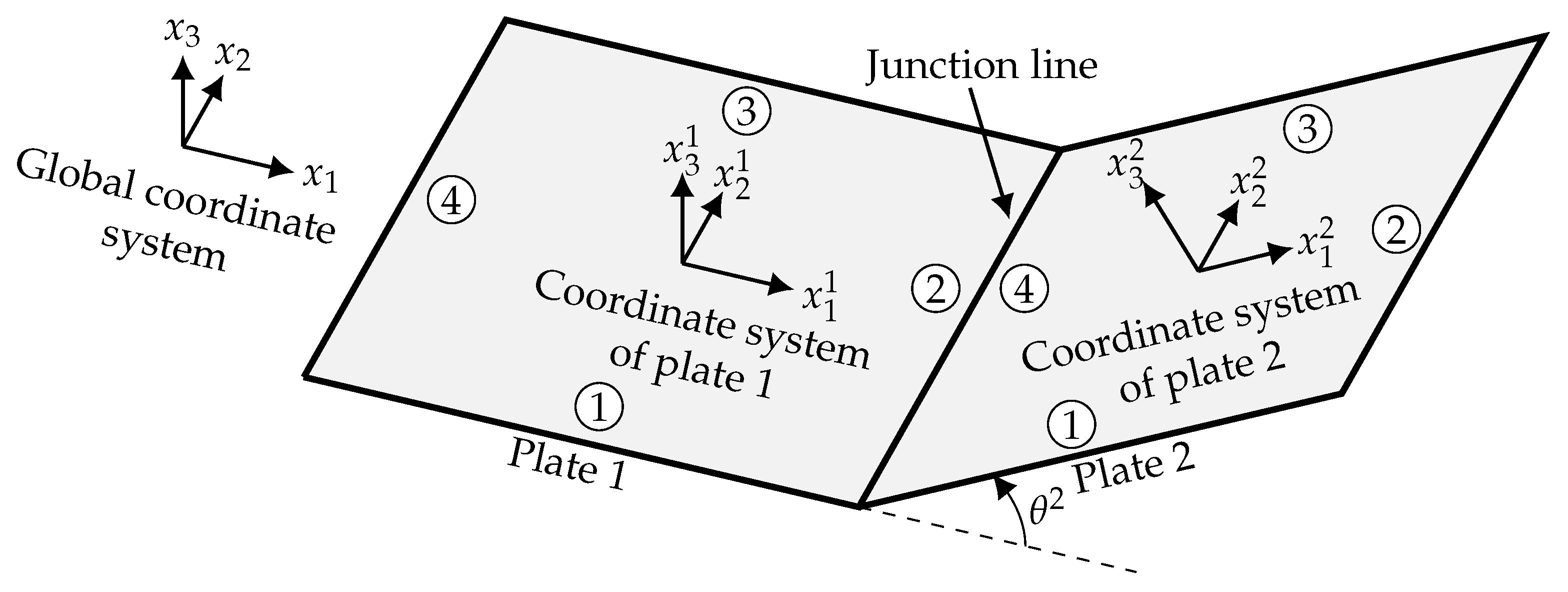
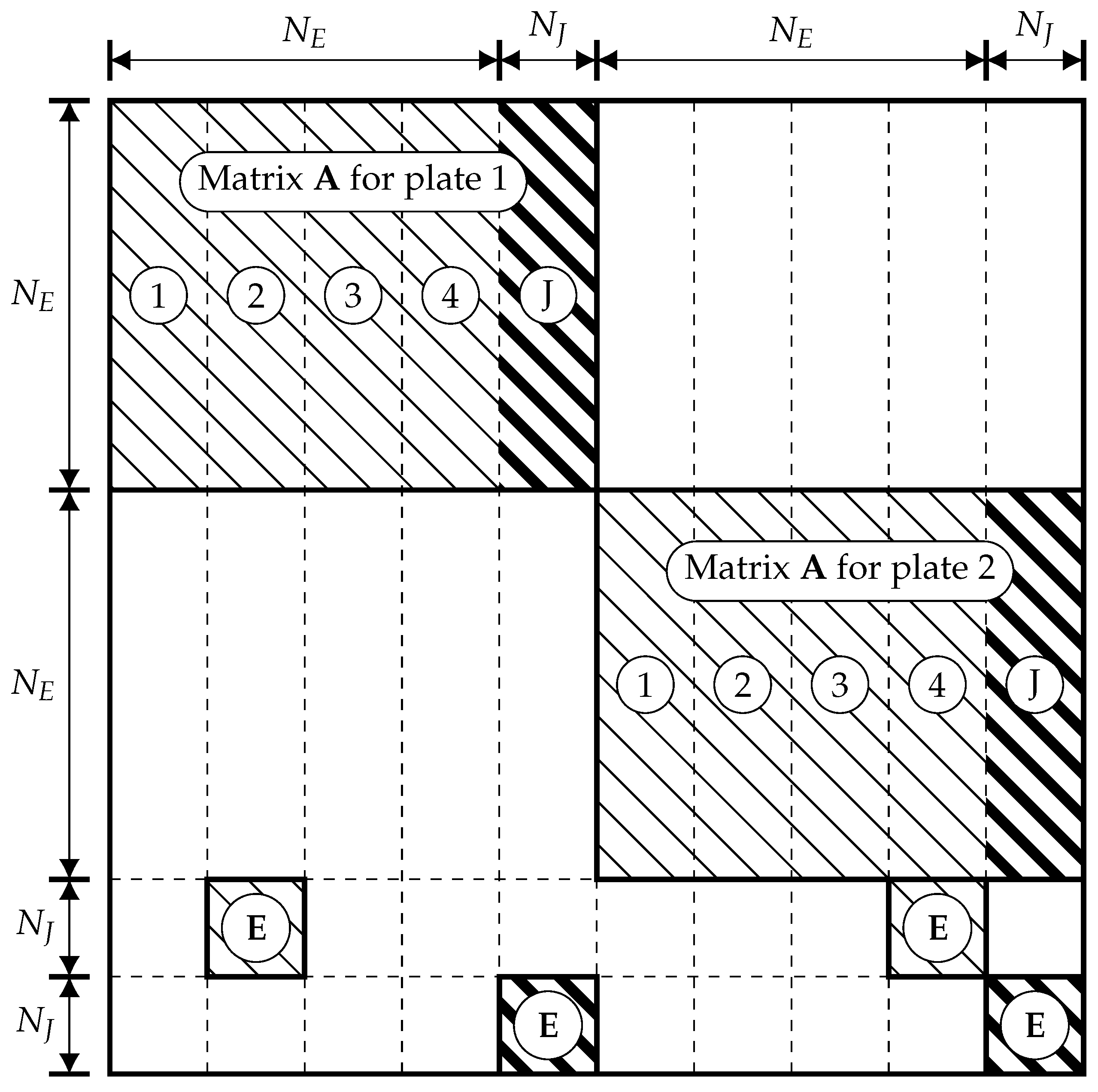
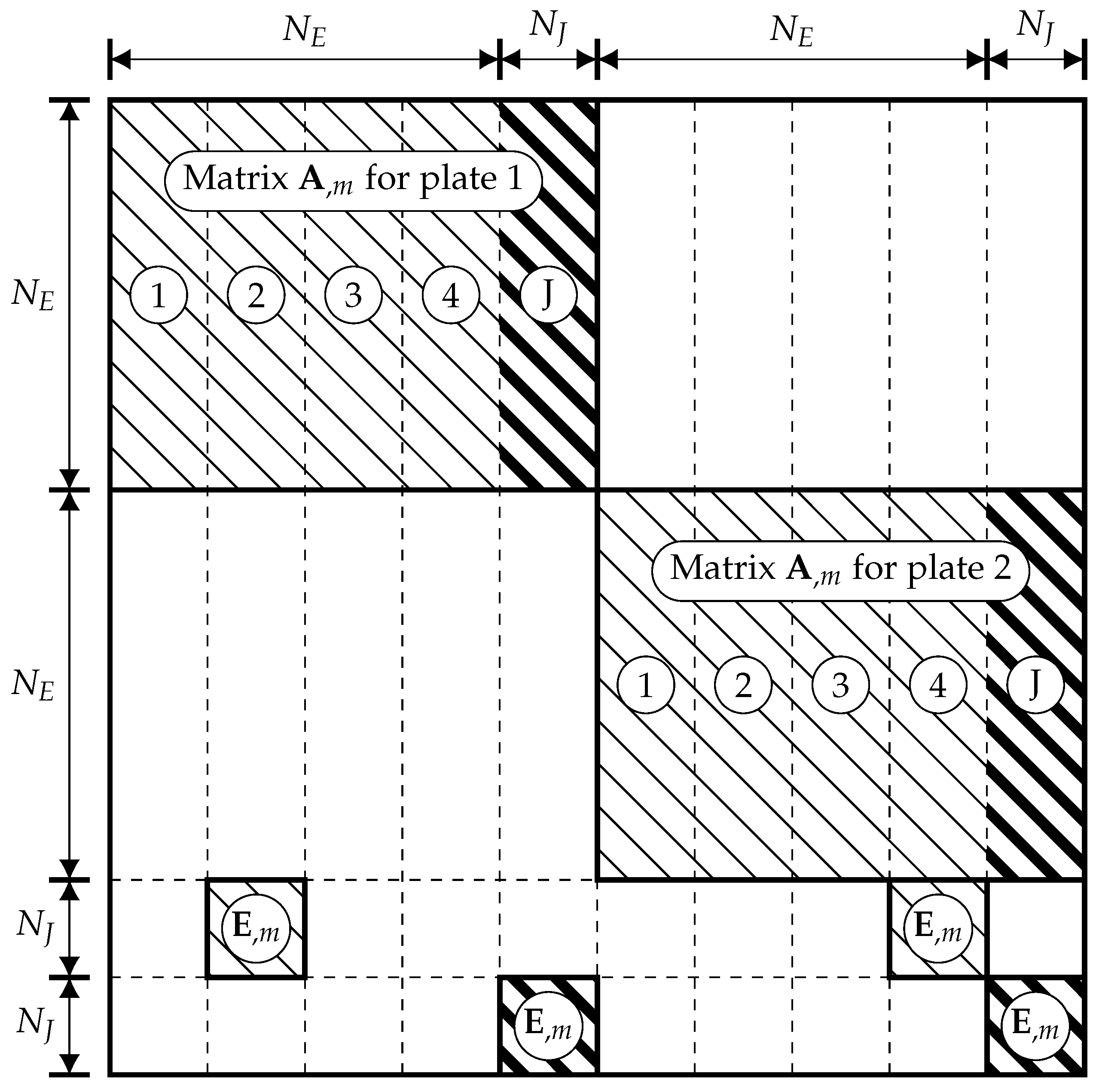
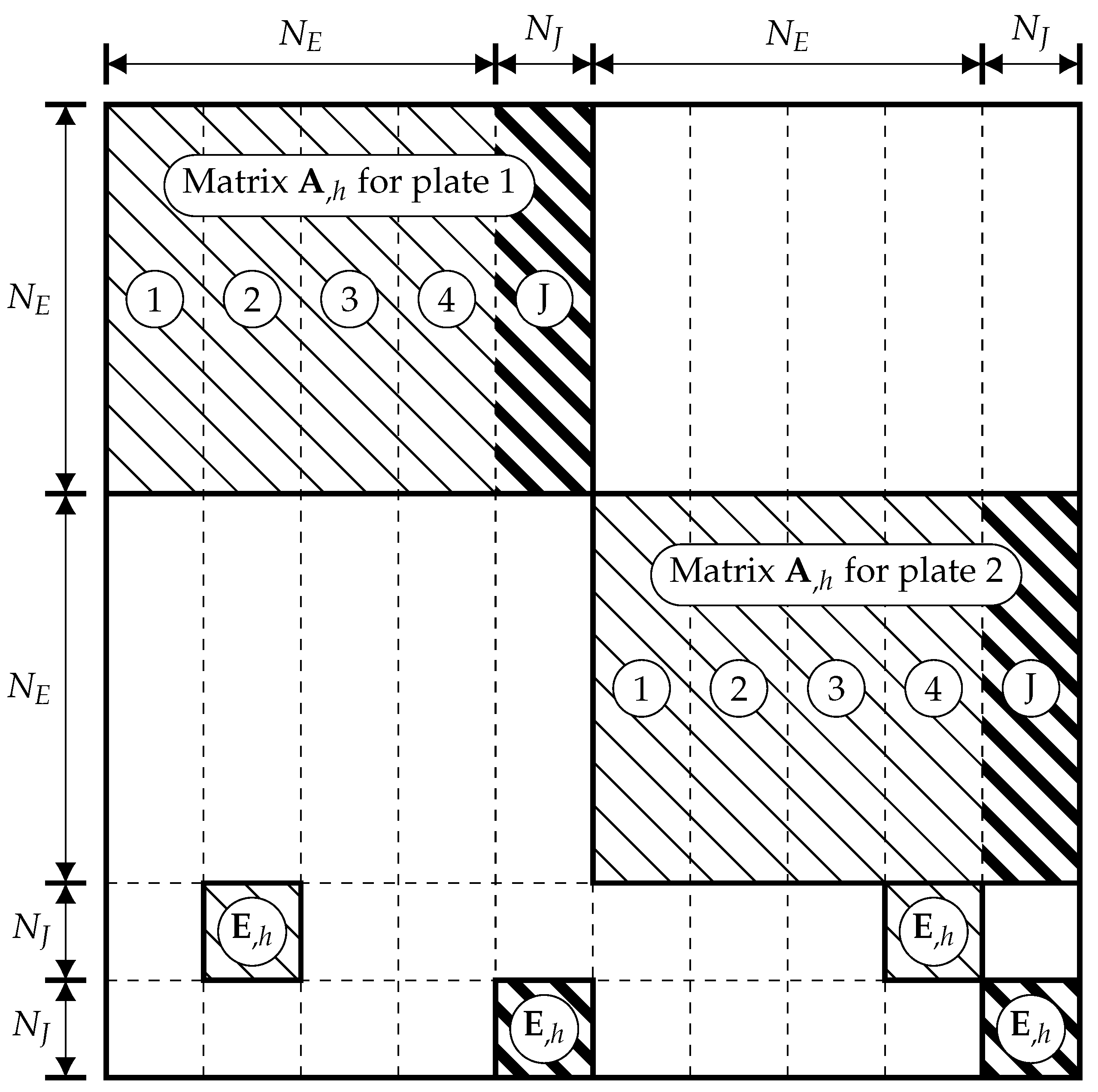
2.3. The Boundary Element Method for Assembled Plate Structures
2.4. The Implicit Differentiation Method for Plate Structures
2.5. The Implicit Differentiation Method for Assembled Plate Structures
3. Numerical Examples
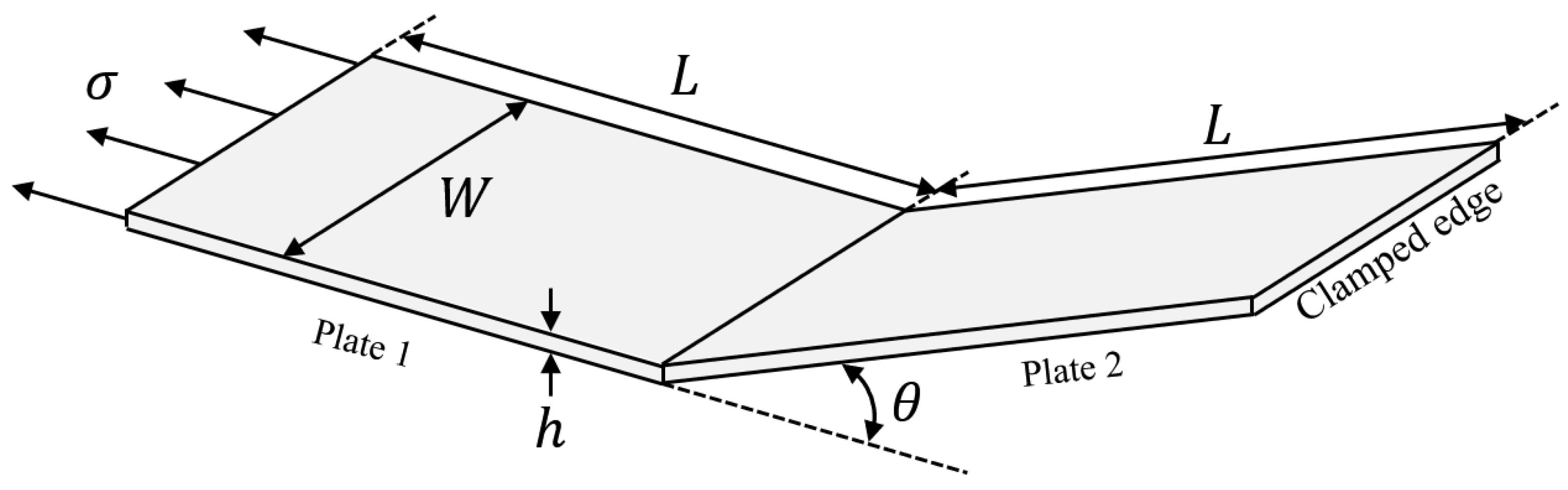
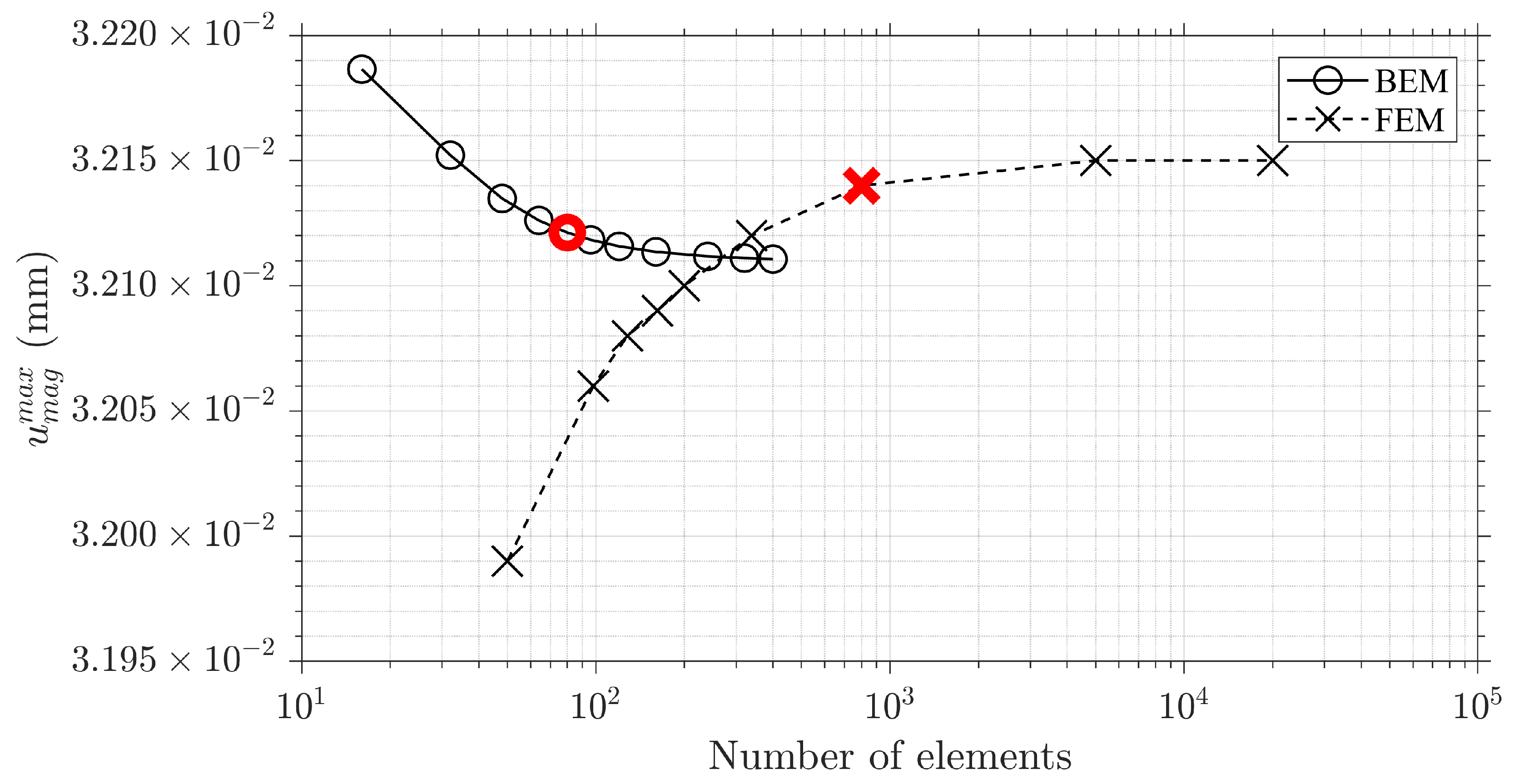
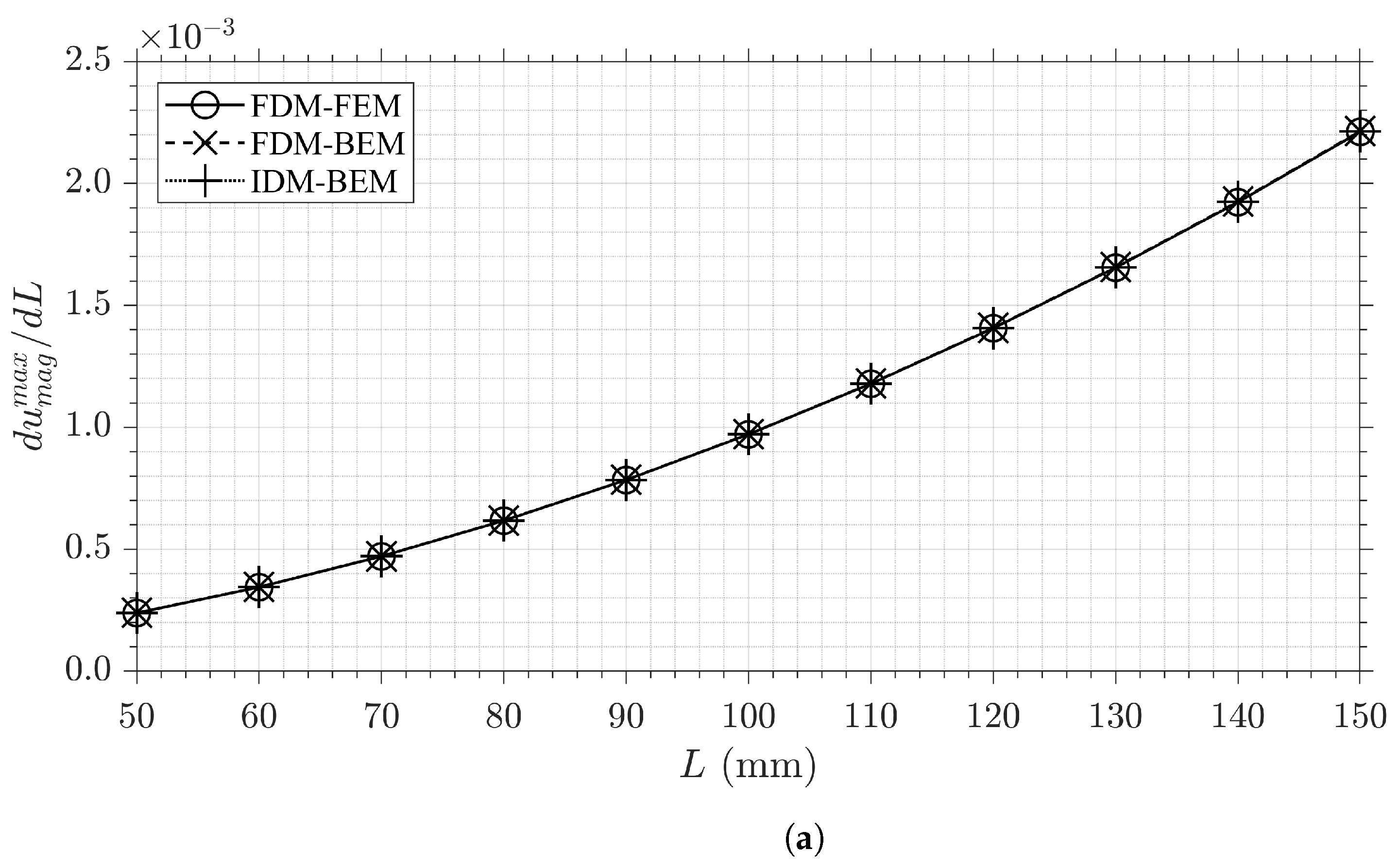
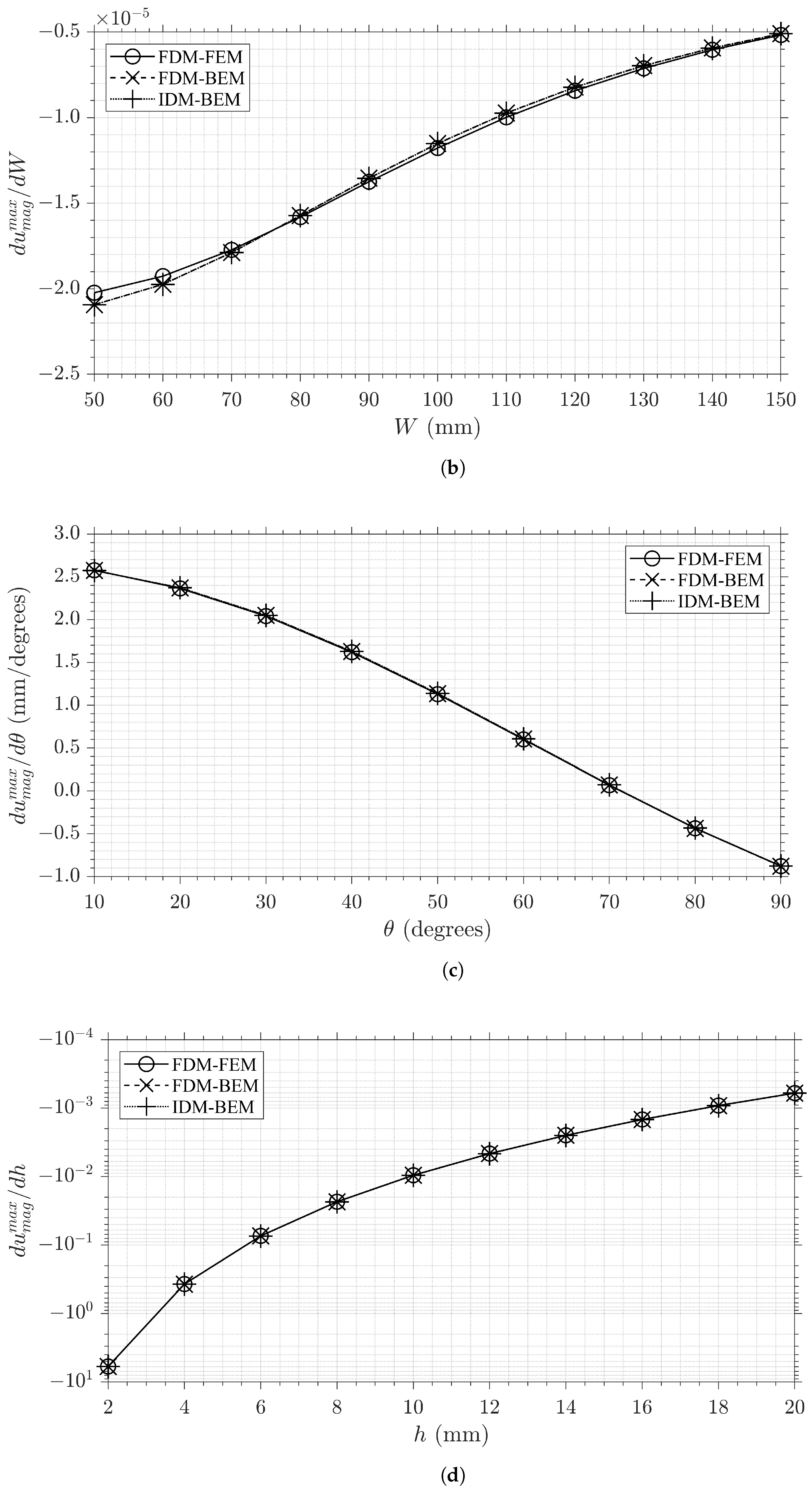
3.1. Numerical Example 1: L-Shaped Plate
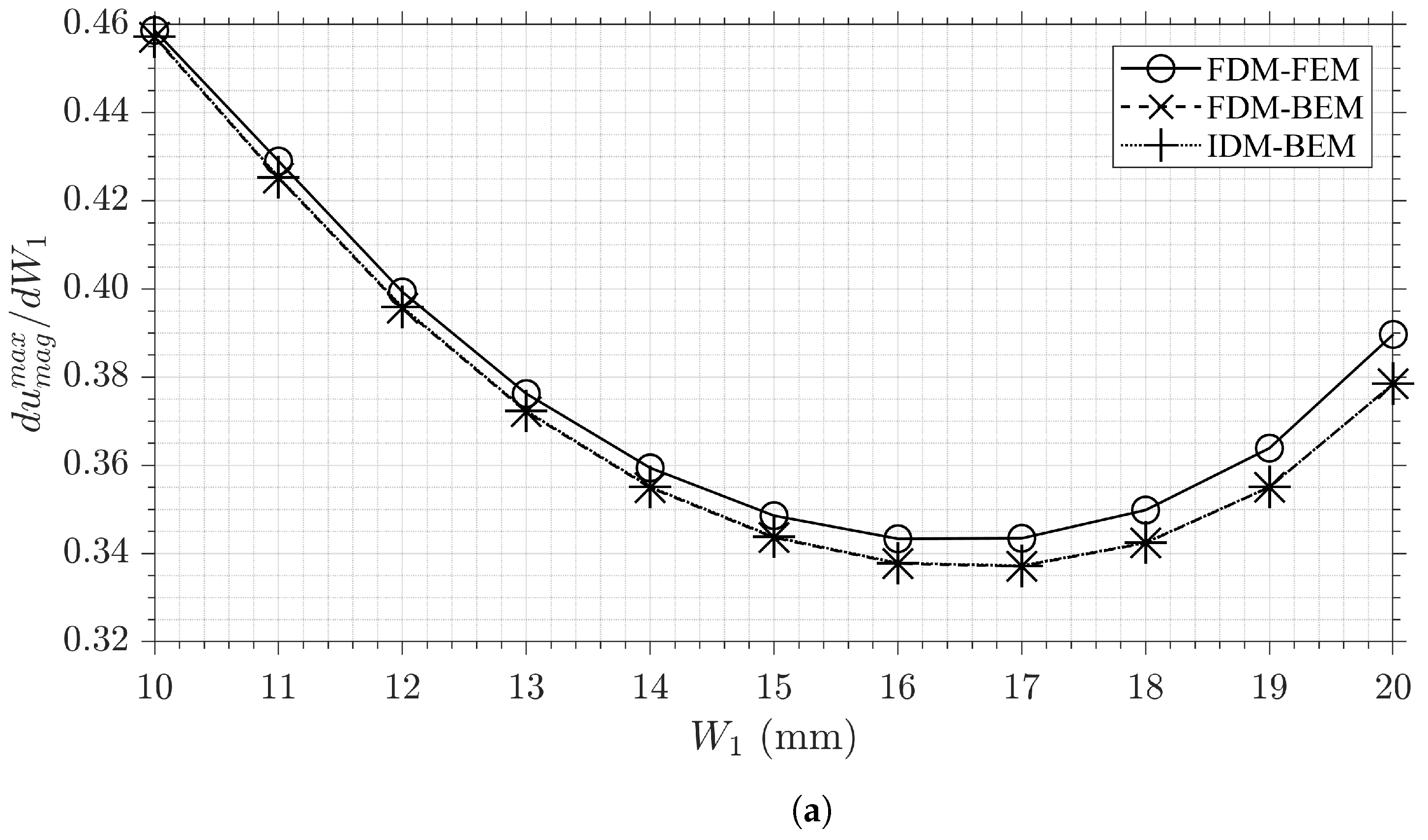
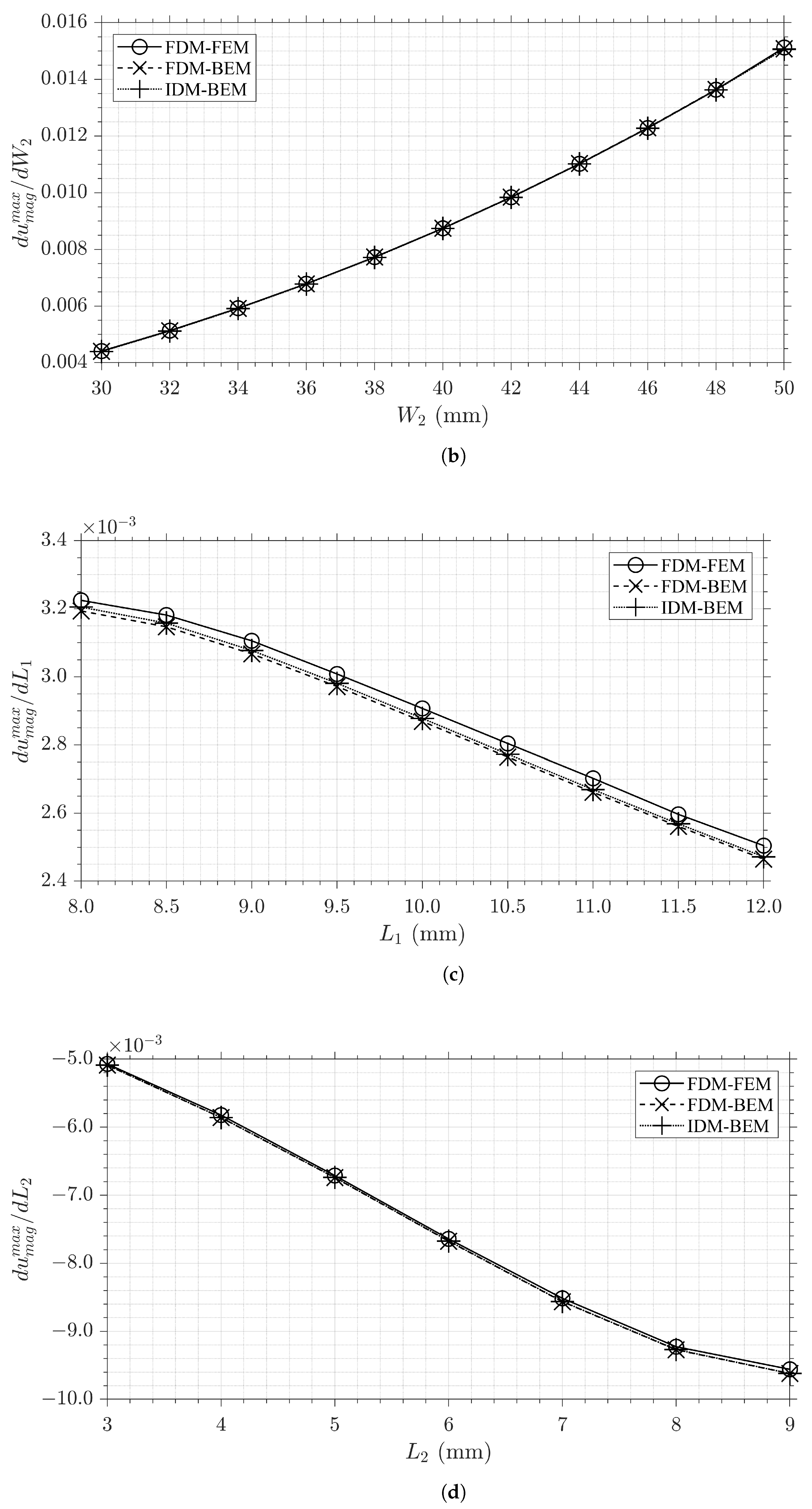
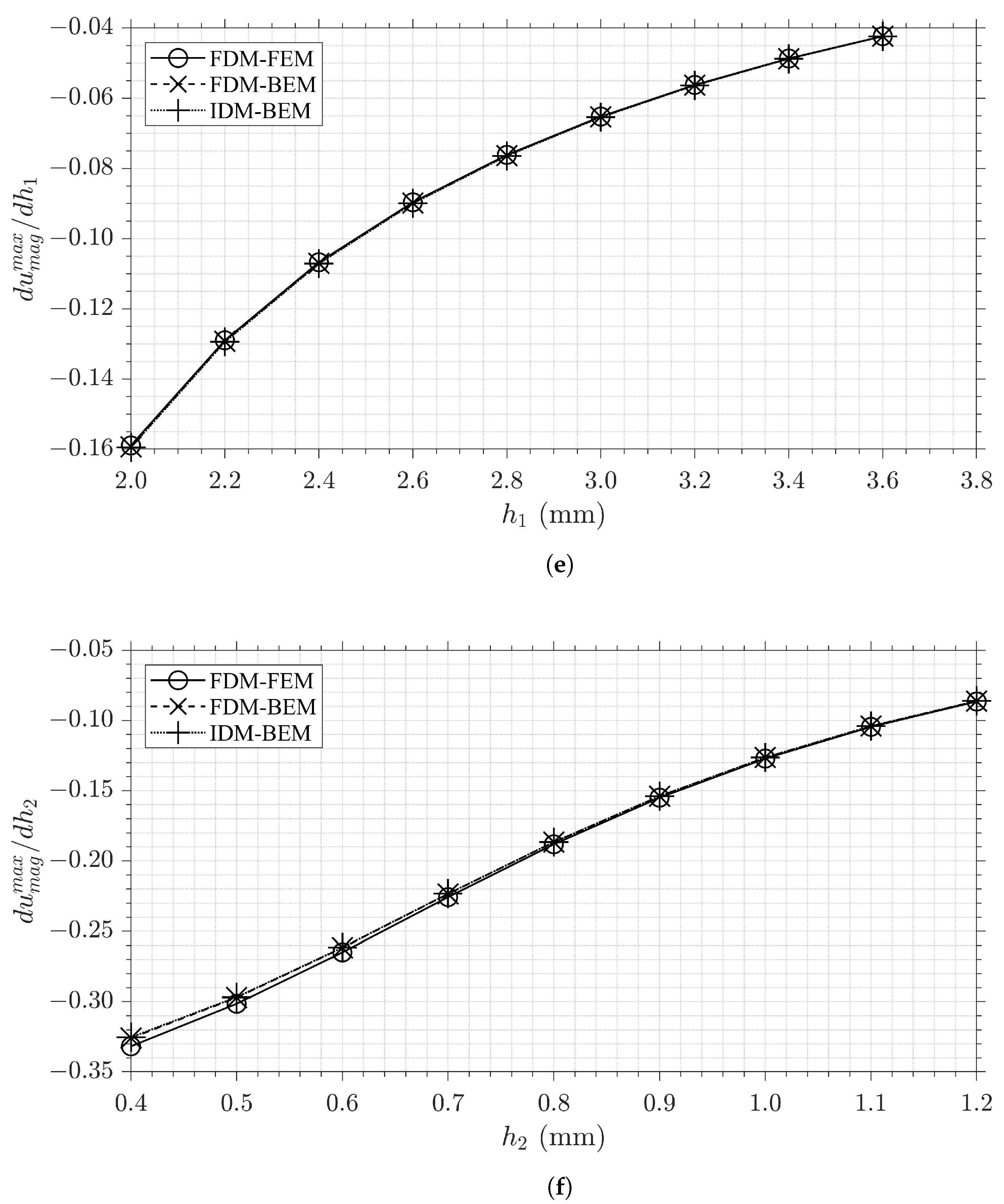
- Method 1: The IDM methodology described in Section 2. This method is referred to as ‘IDM-BEM’.
- Method 2: The BEM with the forward Finite Difference Method (FDM). This method is referred to as ‘FDM-BEM’.
- Method 3: The Finite Element Method (FEM) with the forward FDM. This method is referred to as ‘FDM-FEM’. The FEM software Abaqus FEA was used in this work.
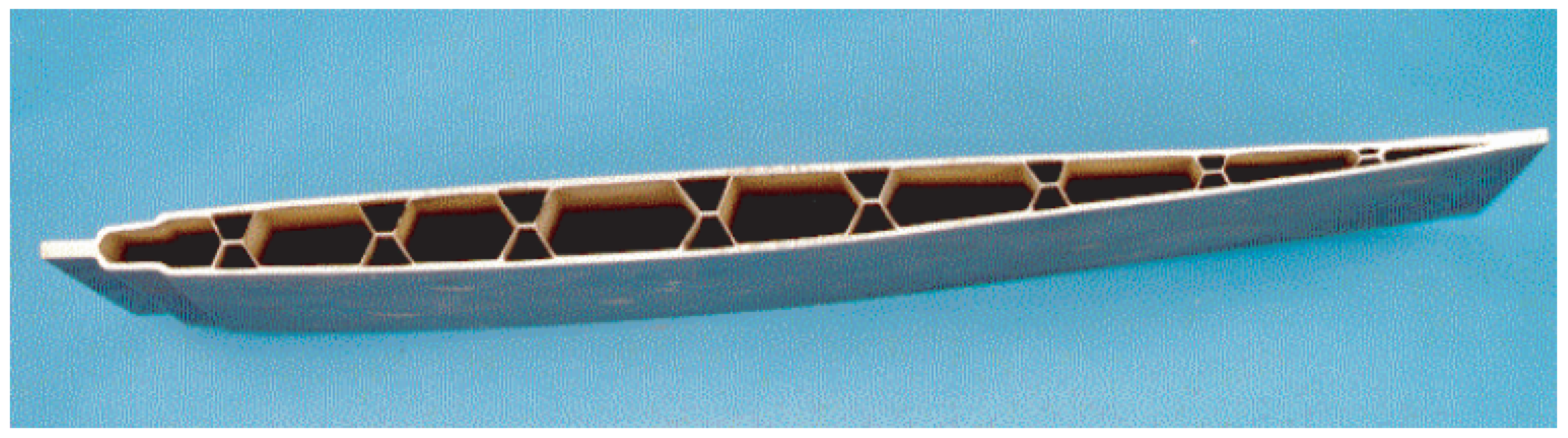
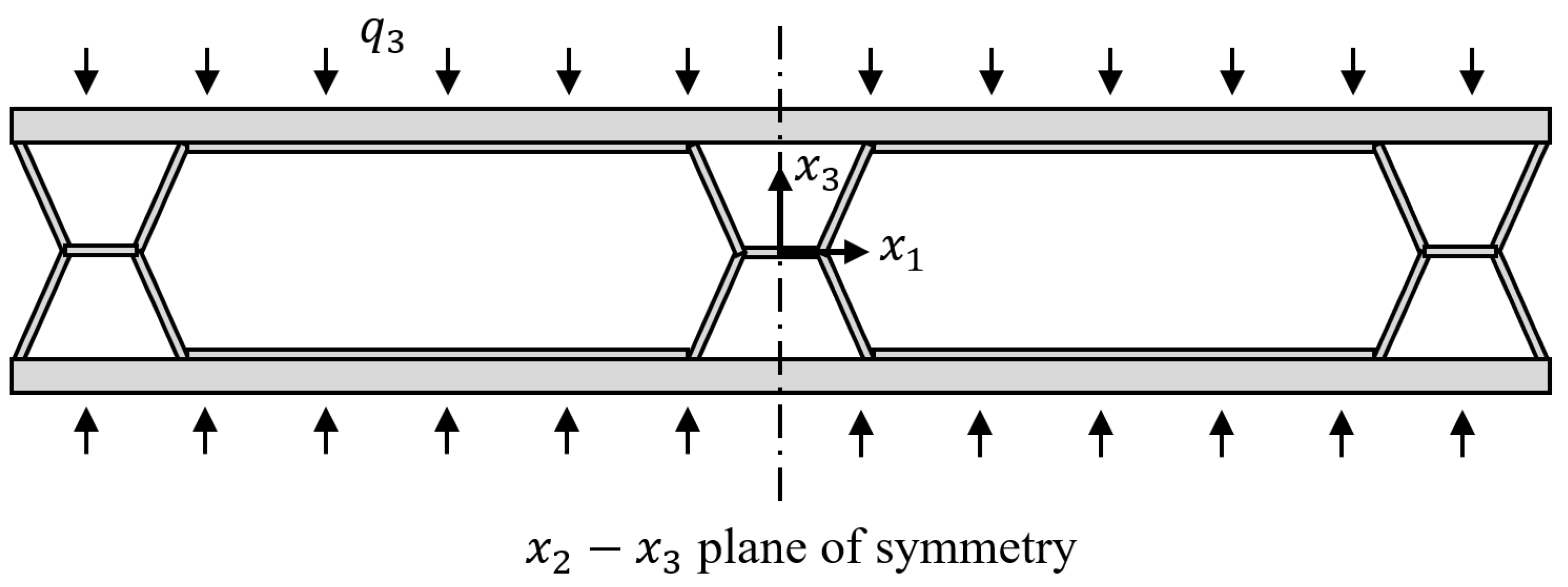
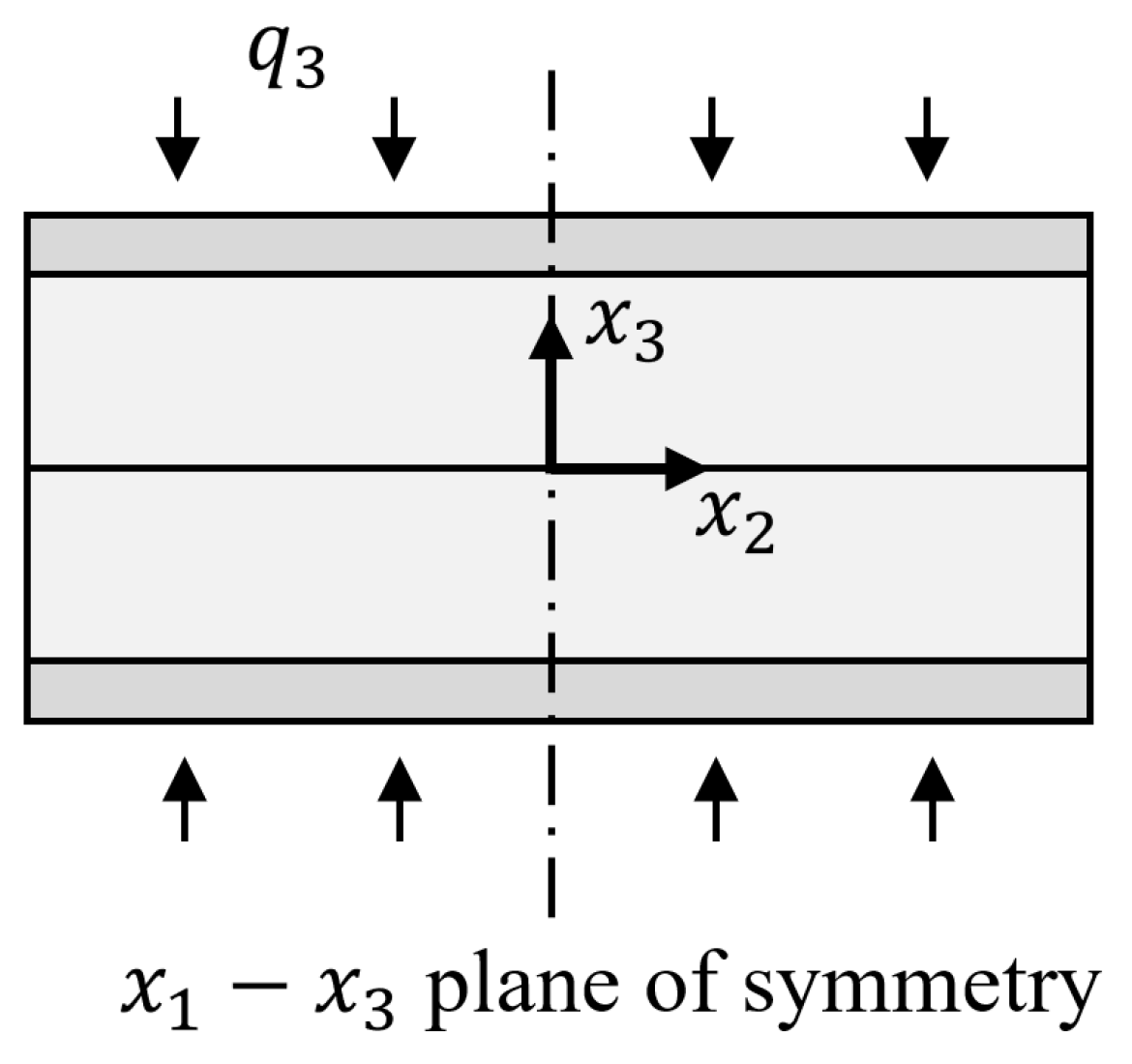
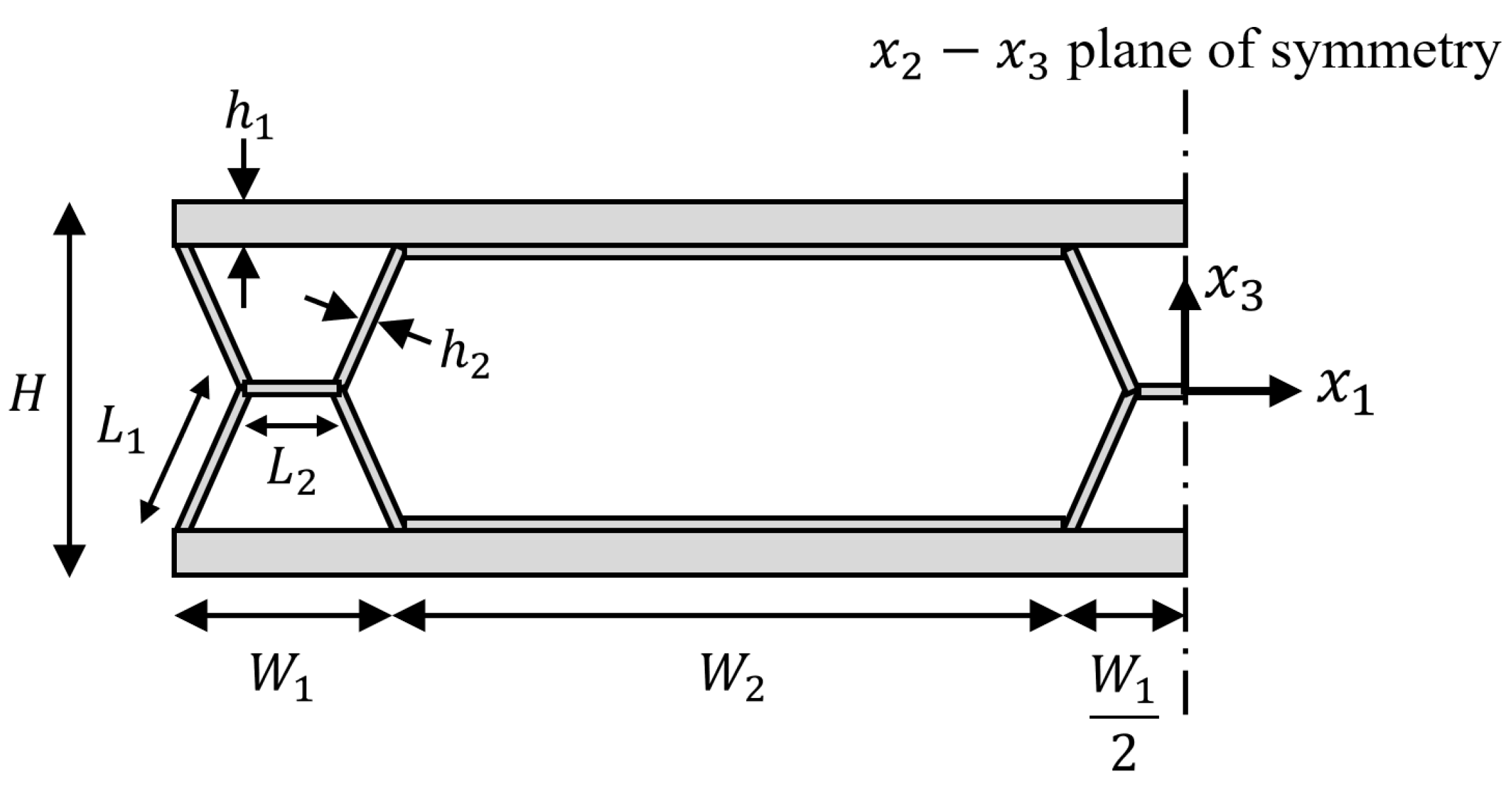
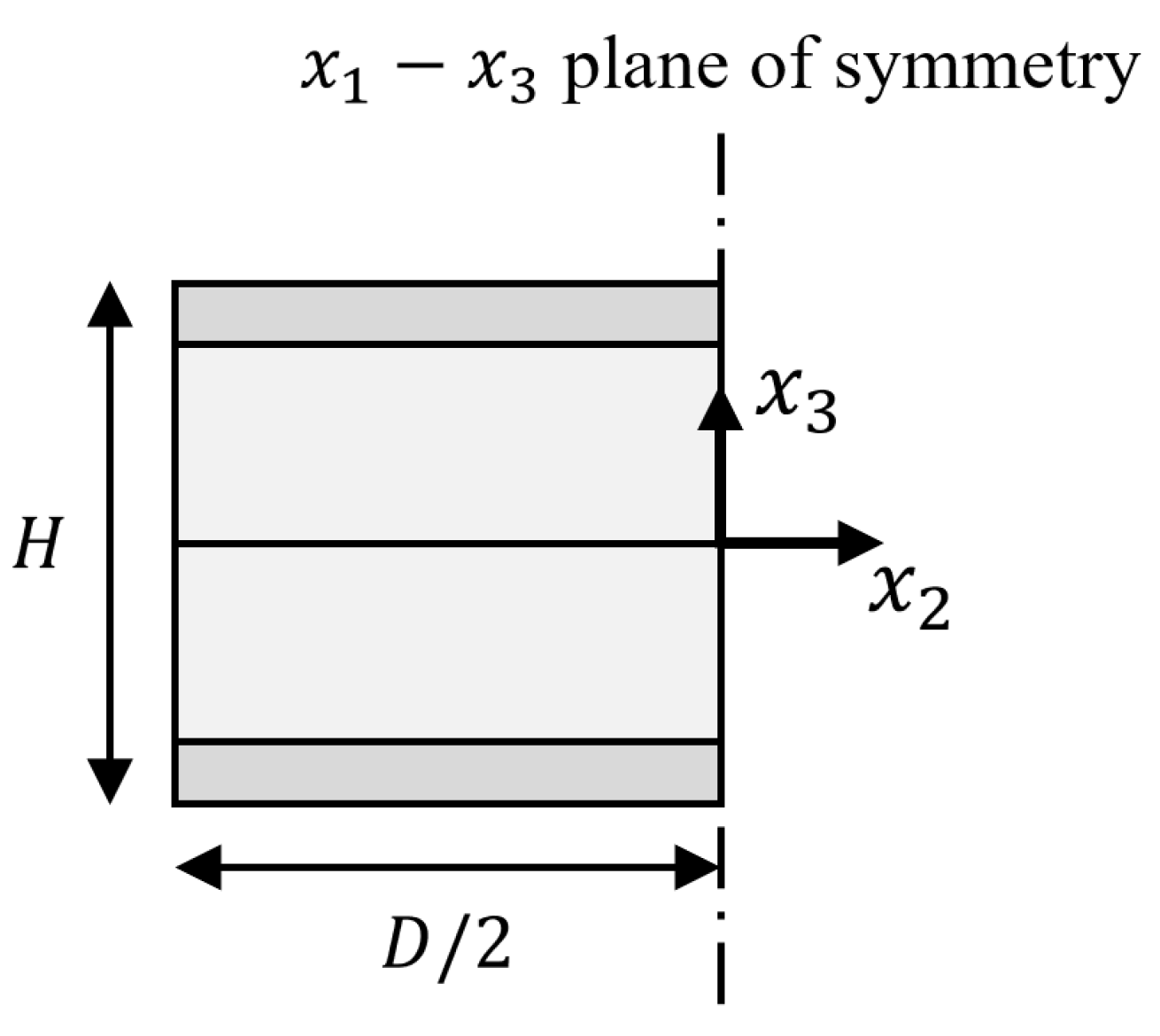
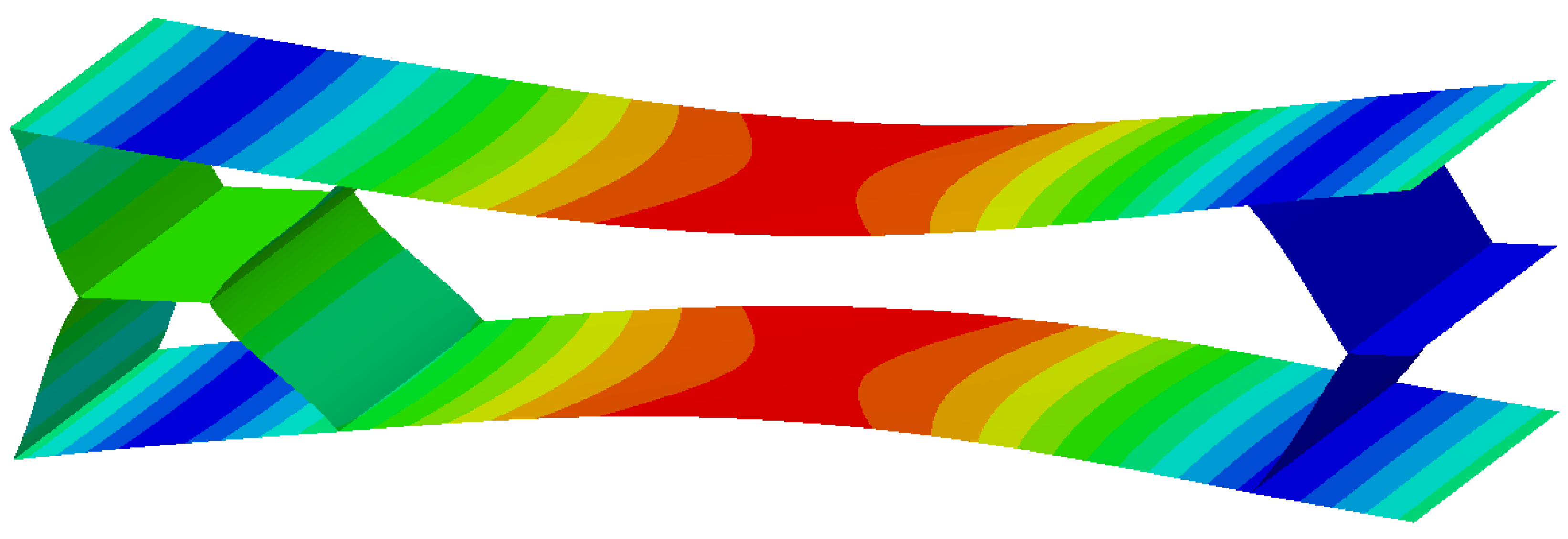
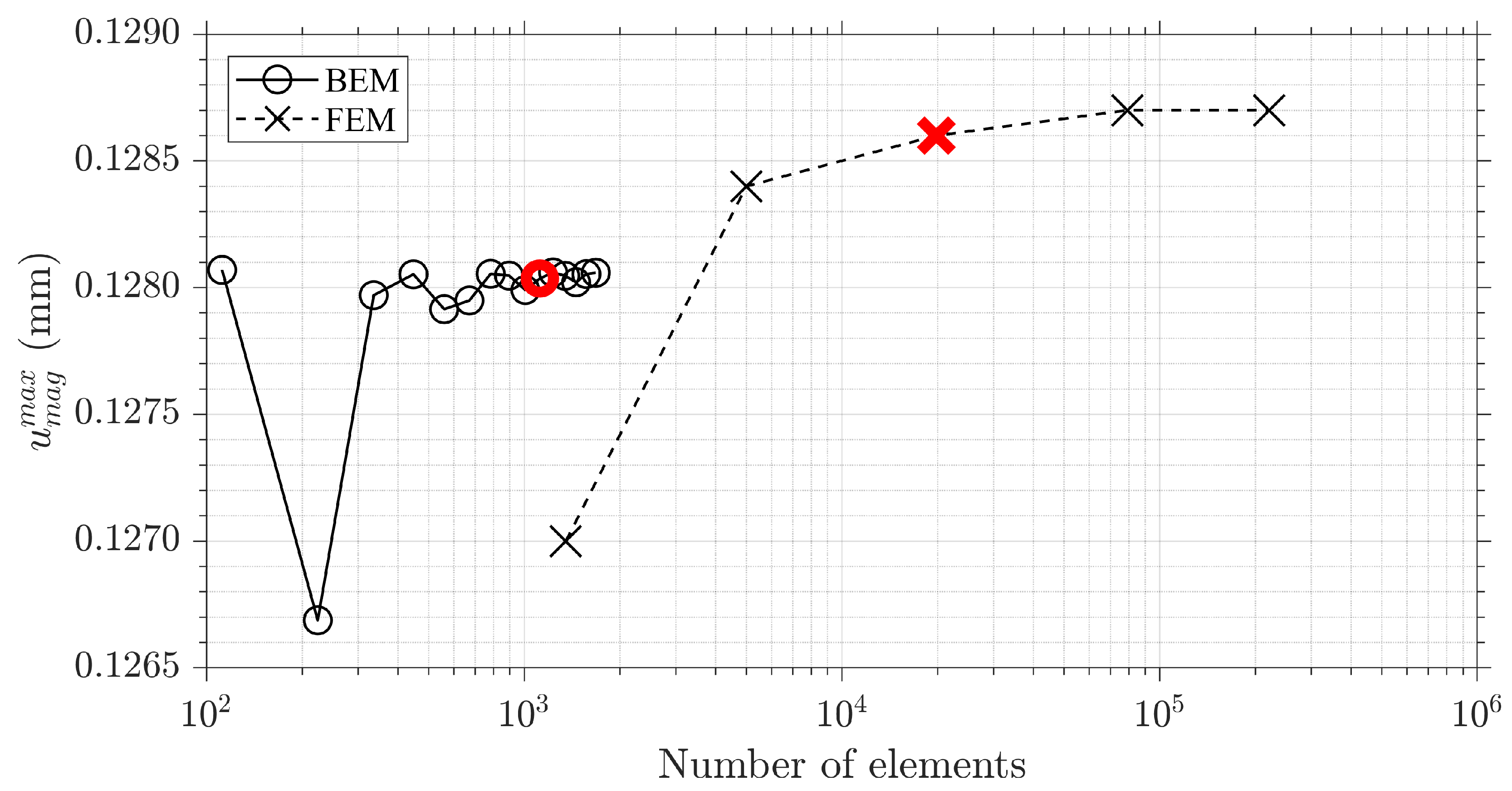
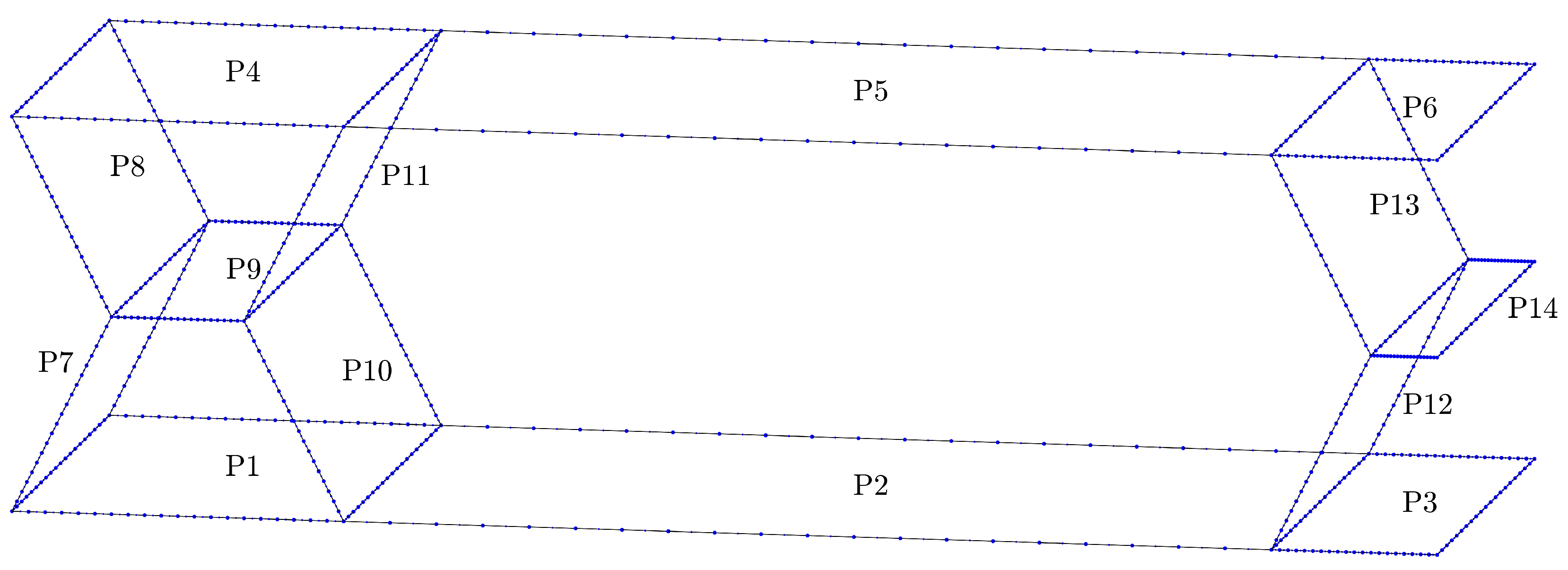
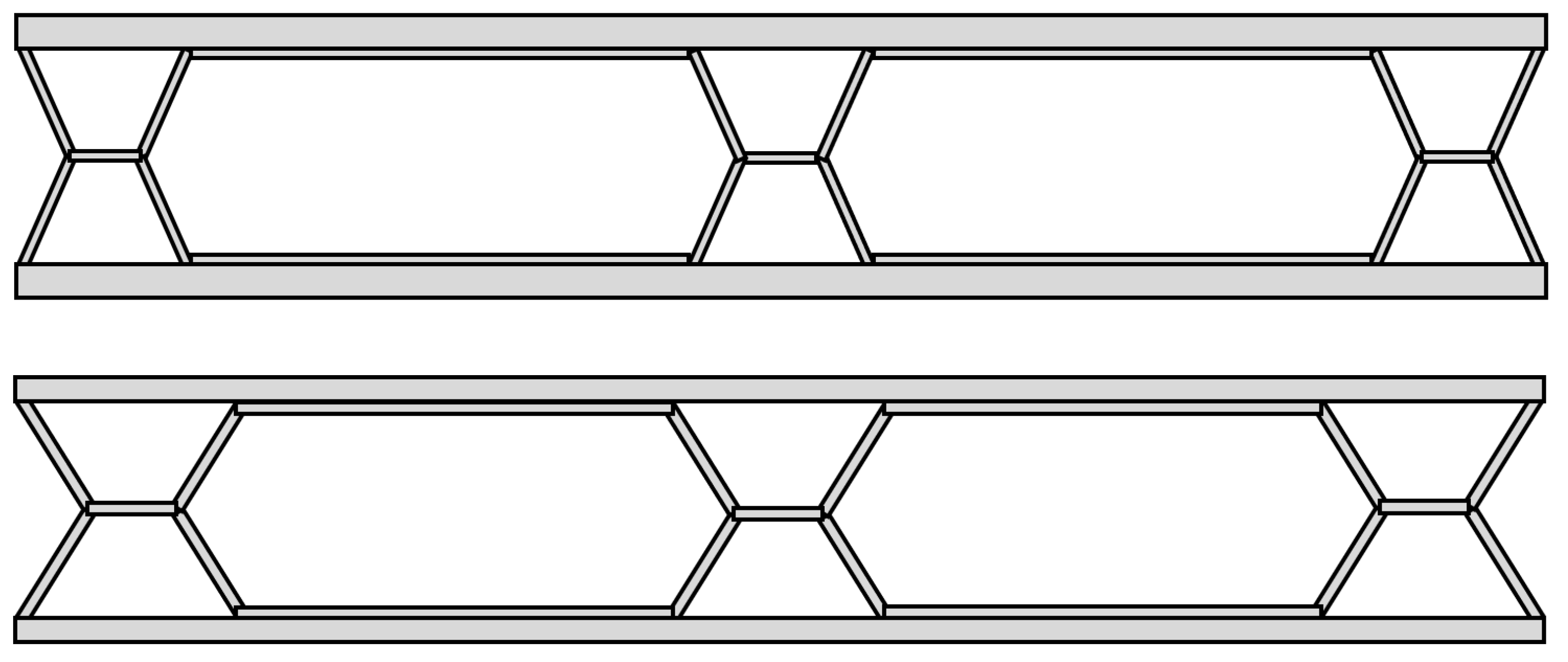
3.2. Numerical Example 2: X-Core
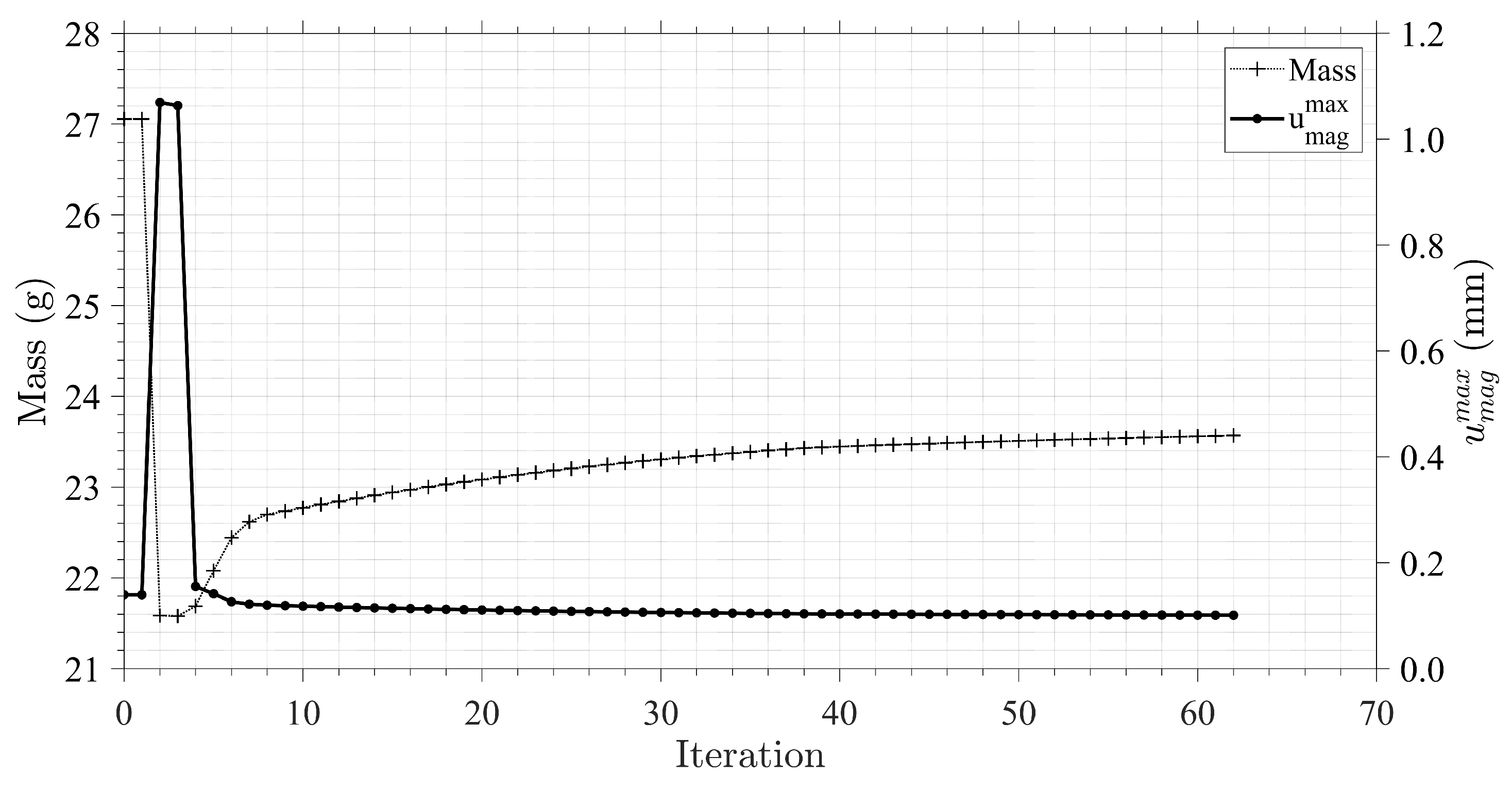
3.3. Numerical Example 3: Shape Optimisation of the X-Core
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aliabadi, M.H. The Boundary Element Method: Applications in Solids and Structures; John Wiley and Sons: Chichester, UK, 2002; Volume 2. [Google Scholar]
- Tafreshi, A. Shape optimization of two-dimensional anisotropic structures using the boundary element method. J. Strain Anal. Eng. Des. 2003, 38, 219–232. [Google Scholar] [CrossRef] [Green Version]
- Abe, K.; Kazama, S.; Koro, K. A boundary element approach for topology optimization problem using the level set method. Commun. Numer. Methods Eng. 2006, 23, 405–416. [Google Scholar] [CrossRef]
- Canelas, A.; Herskovits, J.; Telles, J.C.F. Shape optimization using the boundary element method and a SAND interior point algorithm for constrained optimization. Comput. Struct. 2008, 86, 1517–1526. [Google Scholar] [CrossRef]
- Ullah, B.; Trevelyan, J. Correlation between hole insertion criteria in a boundary element and level set based topology optimisation method. Eng. Anal. Bound. Elem. 2013, 37, 1457–1470. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.; Cheng, H.; Chiu, M.; Chien, Y. Shape Optimisation of Multi-Chamber Acoustical Plenums Using BEM, Neural Networks, and GA Method. Arch. Acoust. 2016, 41, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Ullah, B.; Trevelyan, J. A boundary element and level set based topology optimisation using sensitivity analysis. Eng. Anal. Bound. Elem. 2016, 70, 80–98. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Chen, L.; Zhao, W.; Chen, H. Shape optimization of sound barrier using an isogeometric fast multipole boundary element method in two dimensions. Eng. Anal. Bound. Elem. 2017, 85, 142–157. [Google Scholar] [CrossRef]
- Ullah, B.; Trevelyan, J.; Sirajul, I. A boundary element and level set based bi-directional evolutionary structural optimisation with a volume constraint. Eng. Anal. Bound. Elem. 2017, 80, 152–161. [Google Scholar] [CrossRef] [Green Version]
- Takahashi, T.; Yamamoto, T.; Shimba, Y.; Isakari, H.; Matsumoto, T. A framework of shape optimisation based on the isogeometric boundary element method toward designing thin-silicon photovoltaic devices. Eng. Comput. 2018, 35, 423–449. [Google Scholar] [CrossRef]
- Matsushima, K.; Isakari, H.; Takahashi, T.; Matsumoto, T. A topology optimisation of composite elastic metamaterial slabs based on the manipulation of far-field behaviours. Struct. Multidiscip. Optim. 2020, 63, 231–243. [Google Scholar] [CrossRef]
- Maduramuthu, P.; Fenner, R.T. Three-dimensional shape design optimization of holes and cavities using the boundary element method. J. Strain Anal. Eng. Des. 2004, 39, 87–98. [Google Scholar] [CrossRef]
- Bandara, K.; Cirak, F.; Of, G.; Steinbach, O.; Zapletal, J. Boundary element based multiresolution shape optimisation in electrostatics. J. Comput. Phys. 2015, 297, 584–598. [Google Scholar] [CrossRef] [Green Version]
- Ullah, B.; Trevelyan, J.; Ivrissimtzis, I. A three-dimensional implementation of the boundary element and level set based structural optimisation. Eng. Anal. Bound. Elem. 2015, 58, 176–194. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.L.; Lian, H.; Liu, Z.; Chen, H.B.; Atroshchenko, E.; Bordas, S.P.A. Structural shape optimization of three dimensional acoustic problems with isogeometric boundary element methods. Comput. Methods Appl. Mech. Eng. 2019, 355, 926–951. [Google Scholar] [CrossRef]
- Gaggero, S.; Vernengo, G.; Villa, D.; Bonfiglio, L. A reduced order approach for optimal design of efficient marine propellers. Ships Offshore Struct. 2019, 15, 200–214. [Google Scholar] [CrossRef]
- Li, S.; Trevelyan, J.; Wu, Z.; Lian, H.; Wang, D.; Zhang, W. An adaptive SVD–Krylov reduced order model for surrogate based structural shape optimization through isogeometric boundary element method. Comput. Methods Appl. Mech. Eng. 2019, 349, 312–338. [Google Scholar] [CrossRef] [Green Version]
- Morse, L.; Sharif Khodaei, Z.; Aliabadi, M.H. A multi-fidelity boundary element method for structural reliability analysis with higher-order sensitivities. Eng. Anal. Bound. Elem. 2019, 104, 183–196. [Google Scholar] [CrossRef]
- Morse, L.; Mallardo, V.; Aliabadi, F.M.H. Manufacturing cost and reliability-based shape optimization of plate structures. Int. J. Numer. Methods Eng. 2022, 123, 2189–2213. [Google Scholar] [CrossRef]
- Mallardo, V.; Aliabadi, M.H. A BEM sensitivity and shape identification analysis for acoustic scattering in fluid–solid problems. Int. J. Numer. Methods Eng. 1998, 41, 1527–1541. [Google Scholar] [CrossRef]
- Mallardo, V.; Alessandri, C. Inverse problems in the presence of inclusions and unilateral constraints a boundary element approach. Comput. Mech. 2000, 26, 571–581. [Google Scholar] [CrossRef]
- Morse, L.; Sharif Khodaei, Z.; Aliabadi, M.H. A dual boundary element based implicit differentiation method for determining stress intensity factor sensitivities for plate bending problems. Eng. Anal. Bound. Elem. 2019, 106, 412–426. [Google Scholar] [CrossRef]
- Brancati, A.; Aliabadi, M.H.; Mallardo, V. A BEM sensitivity formulation for three-dimensional active noise control. Int. J. Numer. Methods Eng. 2012, 90, 1183–1206. [Google Scholar] [CrossRef]
- Dirgantara, T.; Aliabadi, M.H. Crack Growth analysis of plates Loaded by bending and tension using dual boundary element method. Int. J. Fract. 1999, 105, 27–47. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| L | Length of plate 1 and 2 | 100 mm |
| W | Width of plate 1 and 2 | 50 mm |
| Angle of plate 2 | 50 | |
| h | Thickness of plate 1 and 2 | 10 mm |
| Parameter | Description | Value |
|---|---|---|
| Width of outer long plate | 15 mm | |
| Width of outer short plate | 42 mm | |
| Length of inner inclined plate | 10 mm | |
| Length of inner horizontal plate | 6 mm | |
| Thickness of outer plate | 2.8 mm | |
| Thickness of inner plate | 0.8 mm | |
| H | Height | 21.5 mm |
| D | Depth | 25 mm |
| Method | CPU Time (s) |
|---|---|
| FDM-FEM | 1120 |
| FDM-BEM | 1149 |
| IDM-BEM | 870 |
| Shape Parameter (mm) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Design | Mass (g) | (mm) | |||||||||
| Before | 15.0 | 42.0 | 10.0 | 6.0 | 2.8 | 0.80 | 21.5 | 25 | 129 | 27.0 | 0.139 |
| After | 18.8 | 36.4 | 10.8 | 7.5 | 2.1 | 0.98 | 21.5 | 25 | 129 | 23.5 | 0.101 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morse, L.; Mallardo, V.; Sharif-Khodaei, Z.; Aliabadi, F.M.H. Shape Optimisation of Assembled Plate Structures with the Boundary Element Method. Aerospace 2022, 9, 381. https://doi.org/10.3390/aerospace9070381
Morse L, Mallardo V, Sharif-Khodaei Z, Aliabadi FMH. Shape Optimisation of Assembled Plate Structures with the Boundary Element Method. Aerospace. 2022; 9(7):381. https://doi.org/10.3390/aerospace9070381
Chicago/Turabian StyleMorse, Llewellyn, Vincenzo Mallardo, Zahra Sharif-Khodaei, and Ferri M.H. Aliabadi. 2022. "Shape Optimisation of Assembled Plate Structures with the Boundary Element Method" Aerospace 9, no. 7: 381. https://doi.org/10.3390/aerospace9070381