
Active Fault-Tolerant Control for Near-Space Hypersonic Vehicles



Abstract
:1. Introduction
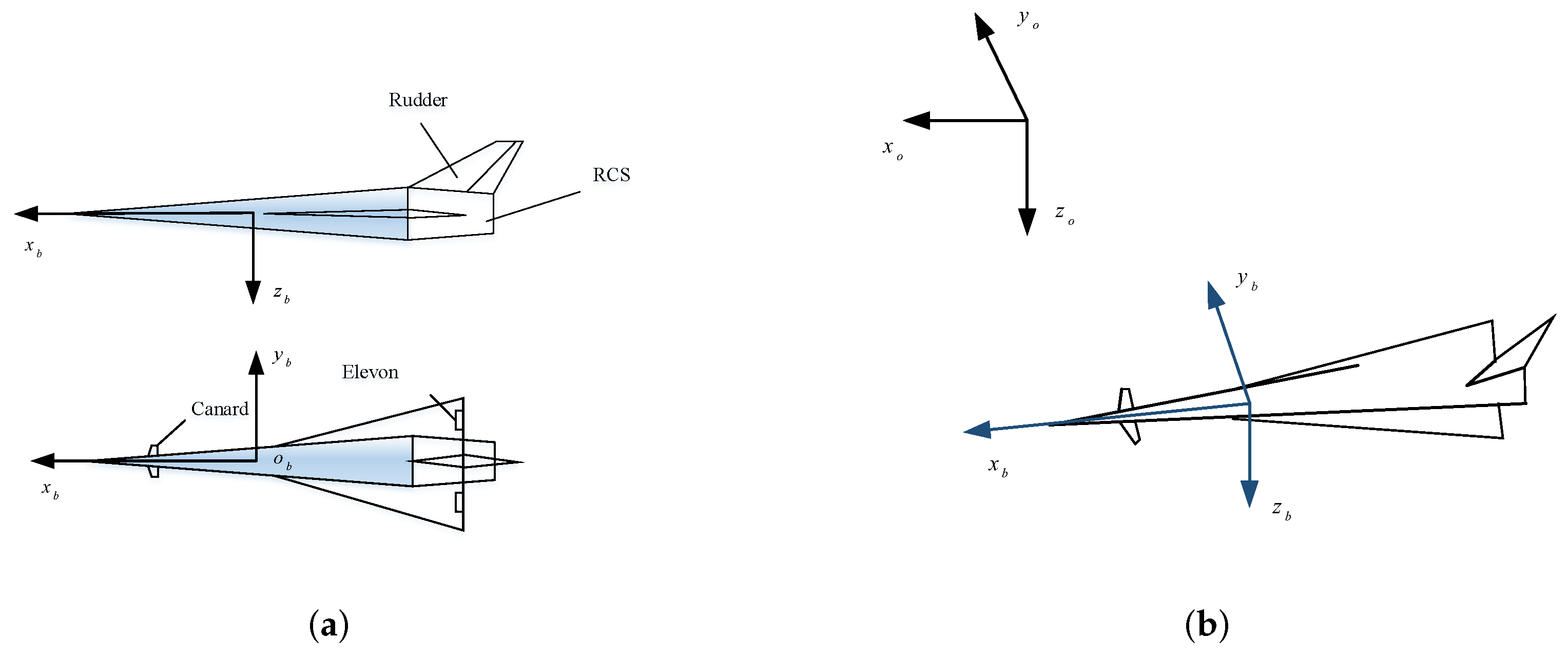
2. Nonlinear Model of NSHV with Closed-Loop Faults
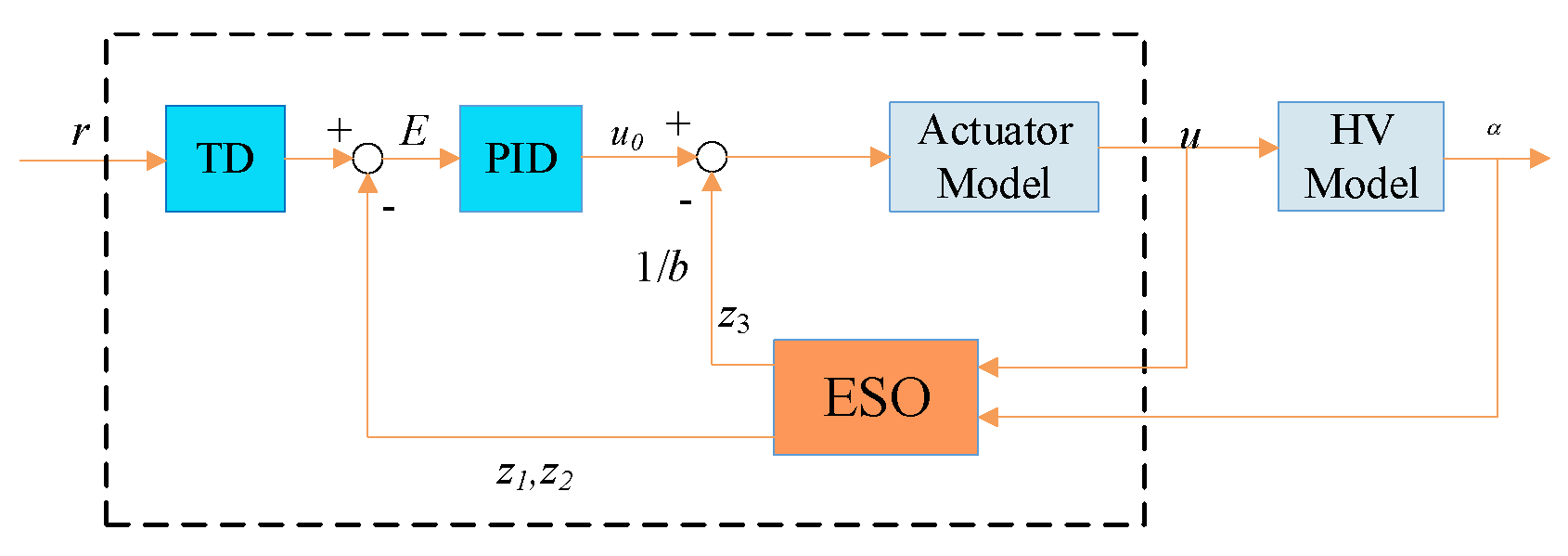
2.1. NSHV Passive Fault-Tolerant Control
2.2. Description and Modeling of Actuator Faults and Sensor Faults
3. Construction of ADRC Based AFTC
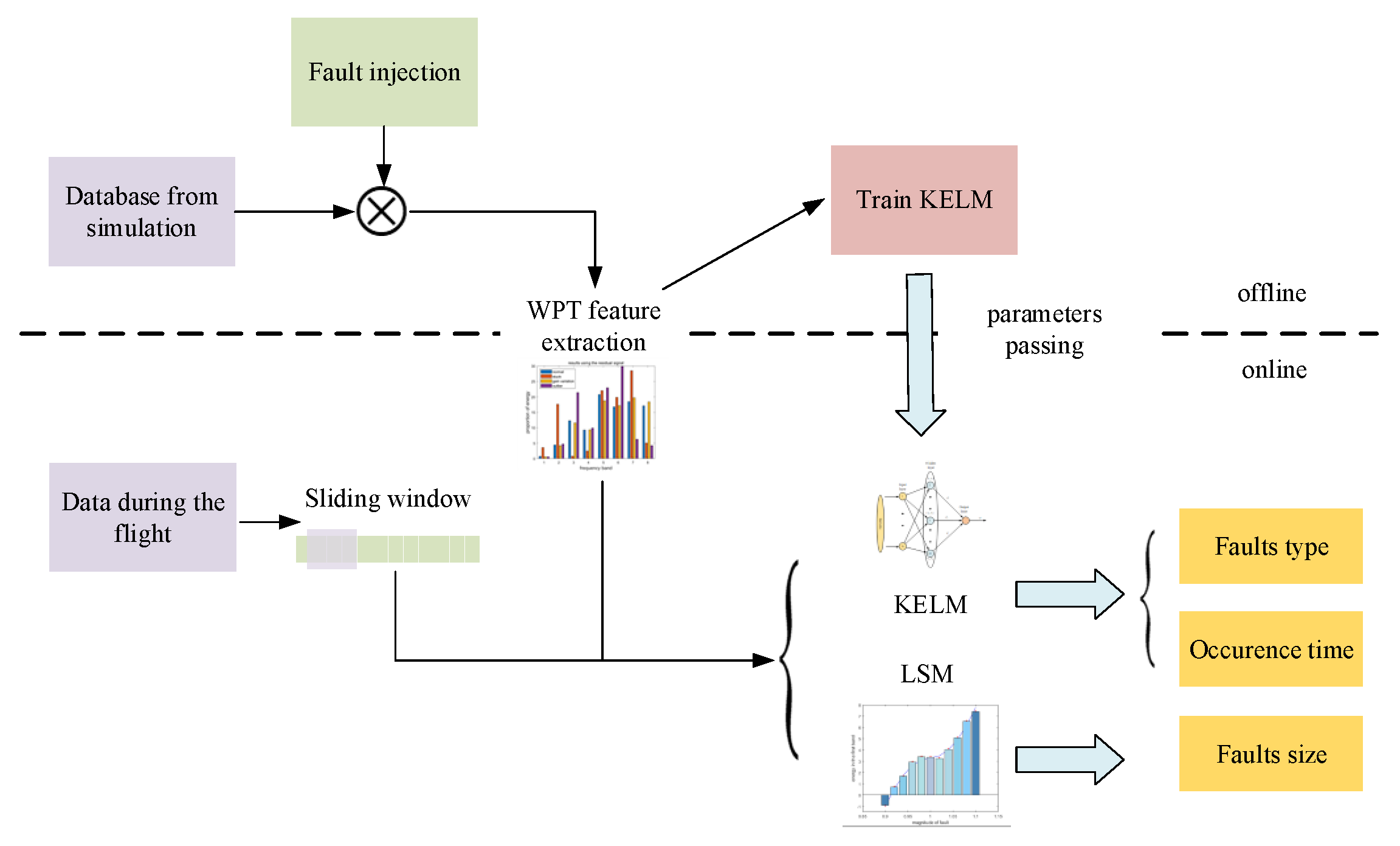
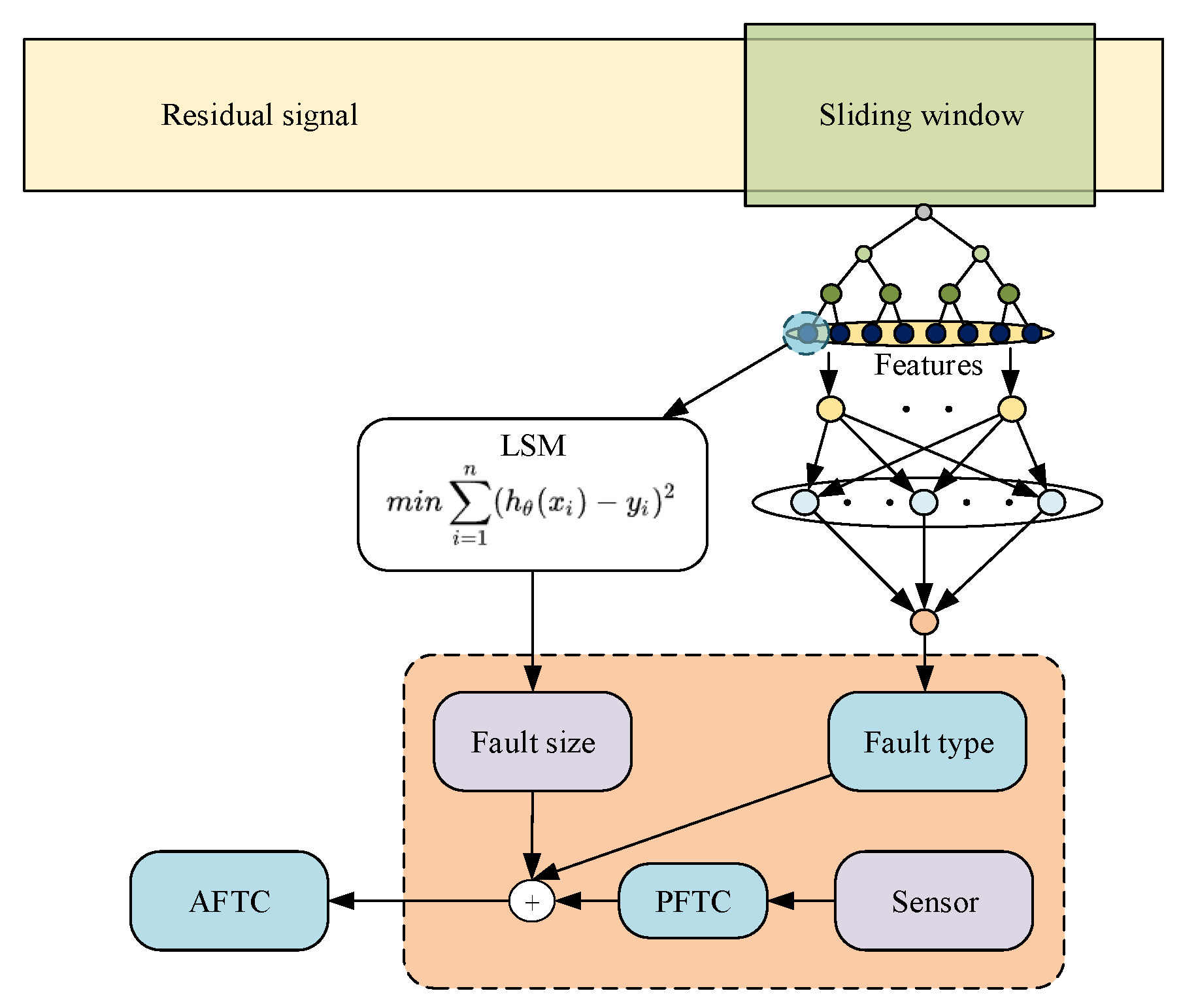
3.1. Fault Diagnosis and Identification
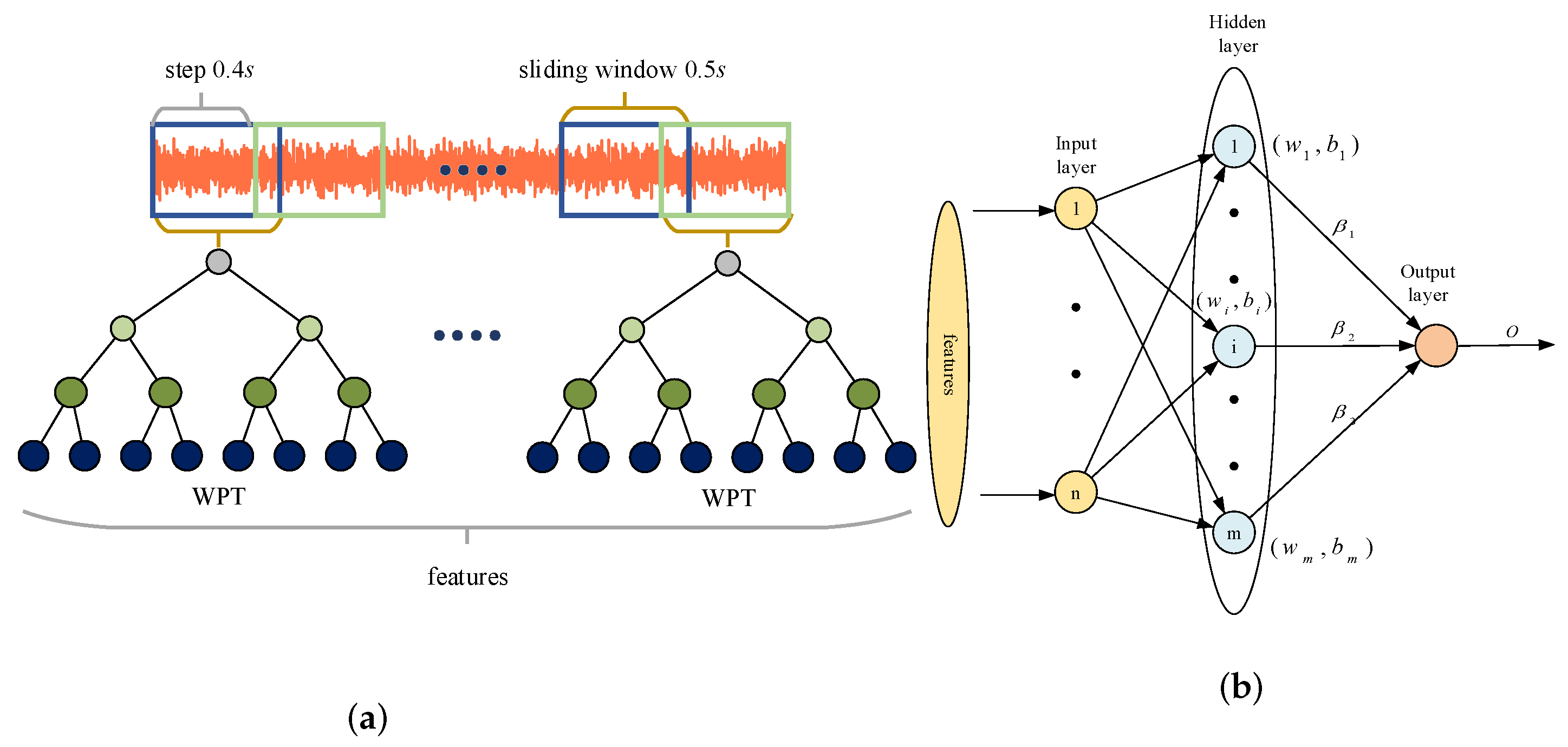
3.1.1. Fault Diagnosis by WPT and KELM
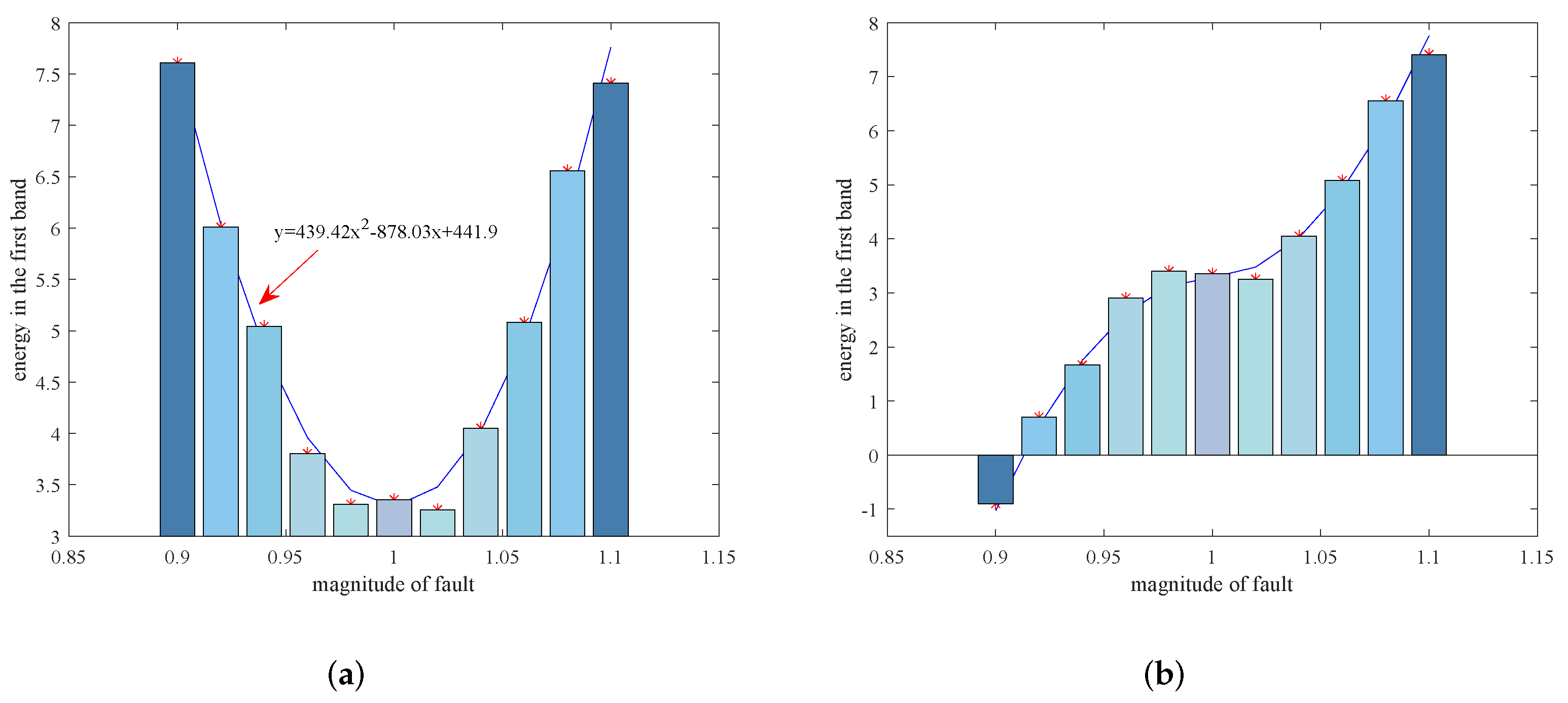
3.1.2. Joint Time-Frequency Analysis Based Fault Identification
3.2. Policy of Controller Reconstruction
4. Simulation Results
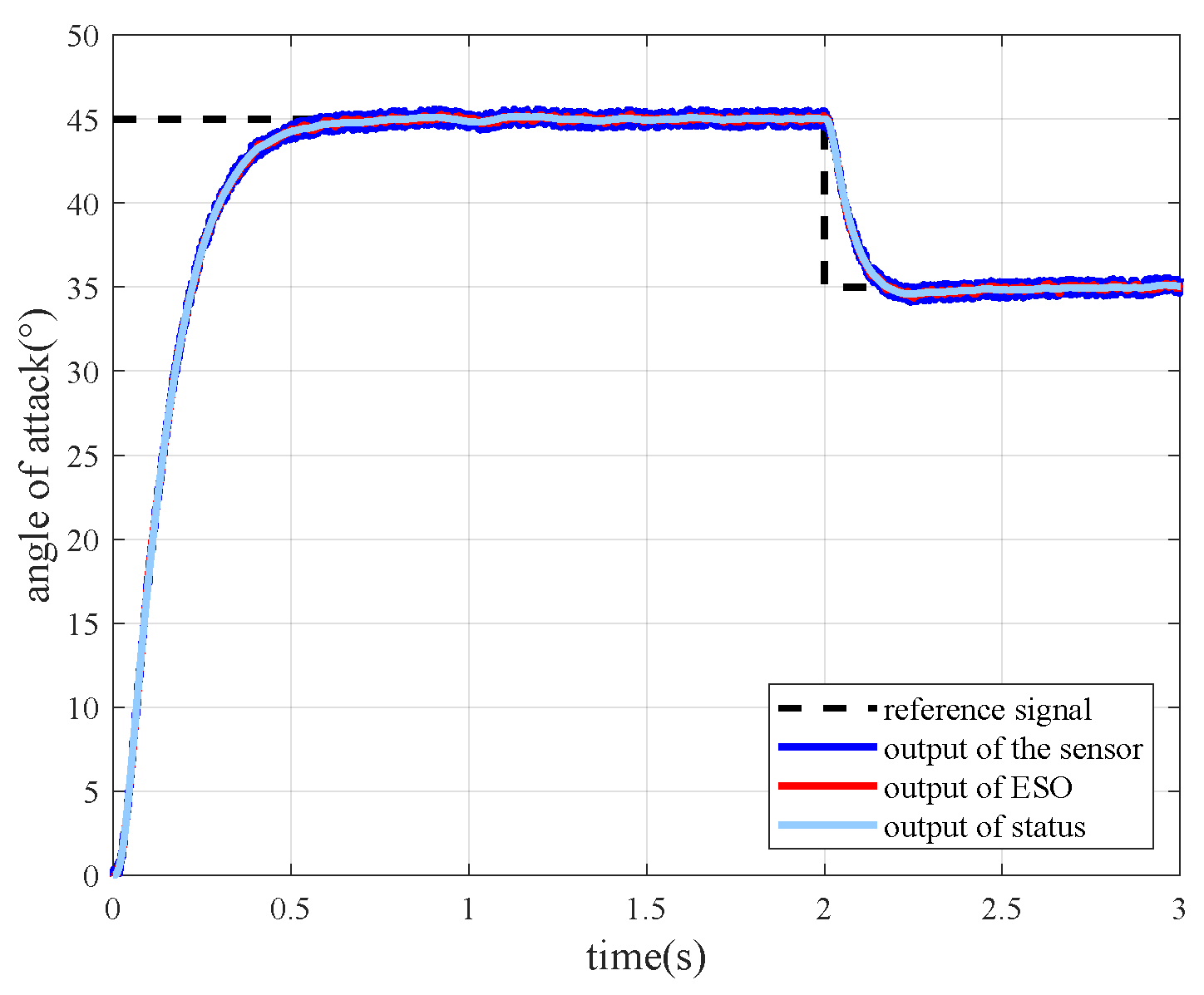
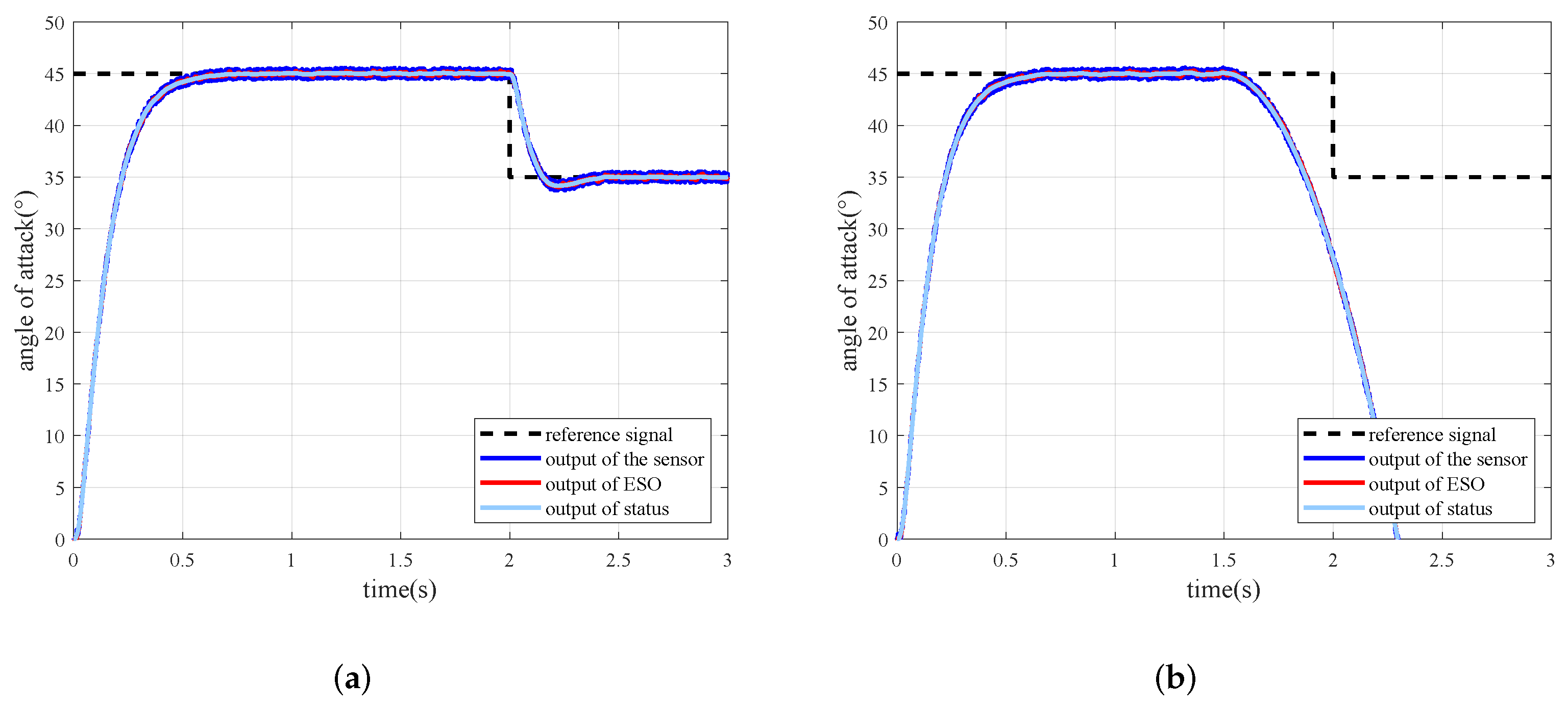
4.1. Simulations with Actuator Faults
4.2. Simulations with Sensor Faults
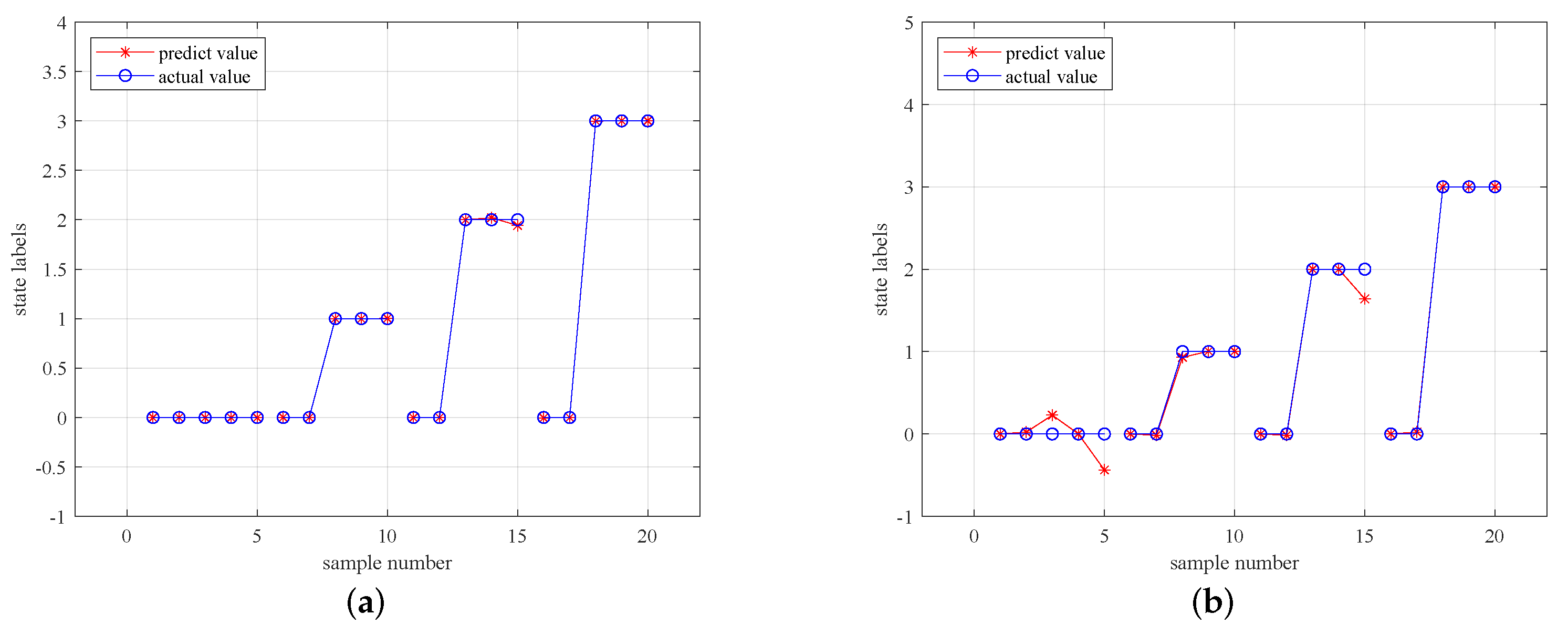
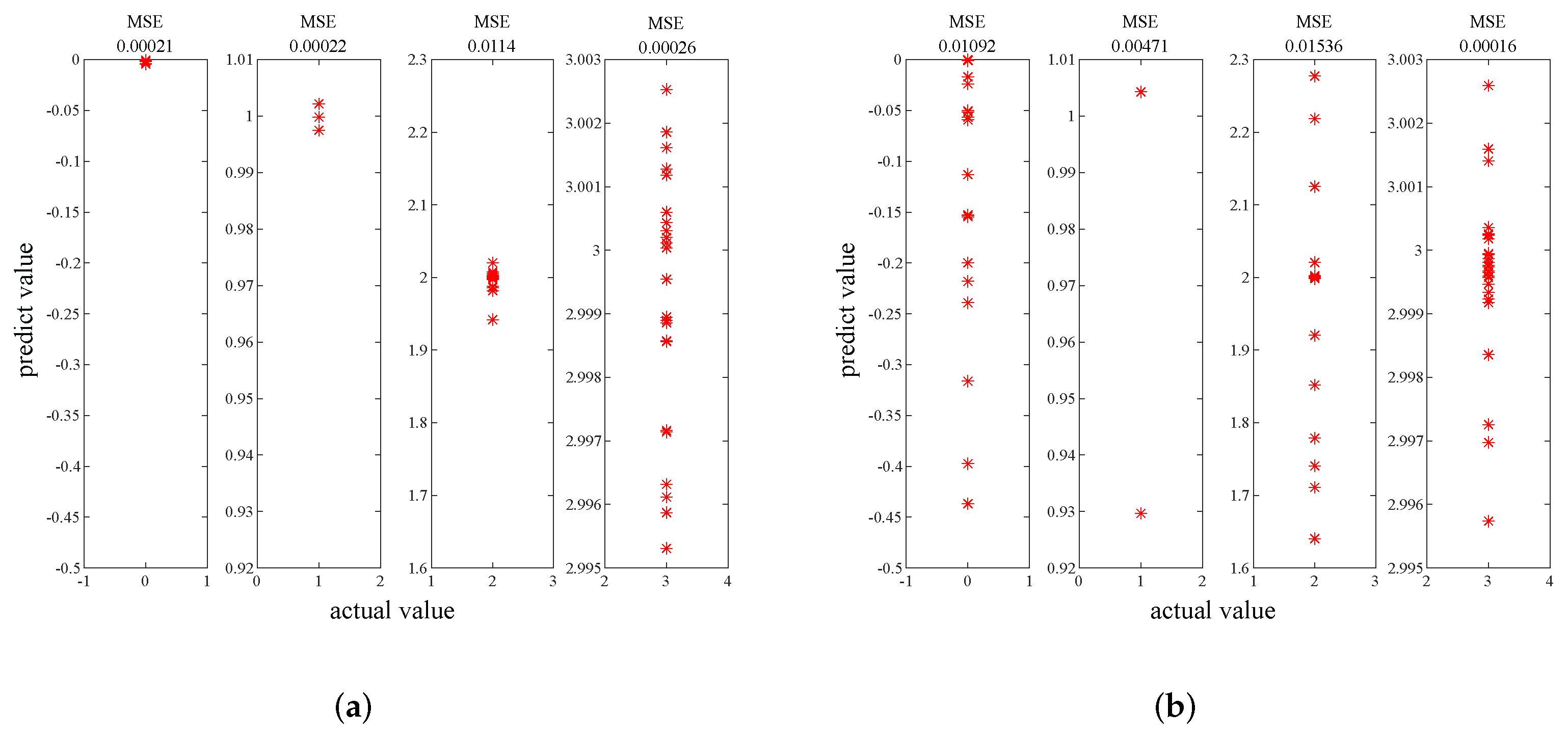
4.3. Simulations of the Proposed Fault Diagnosis Method
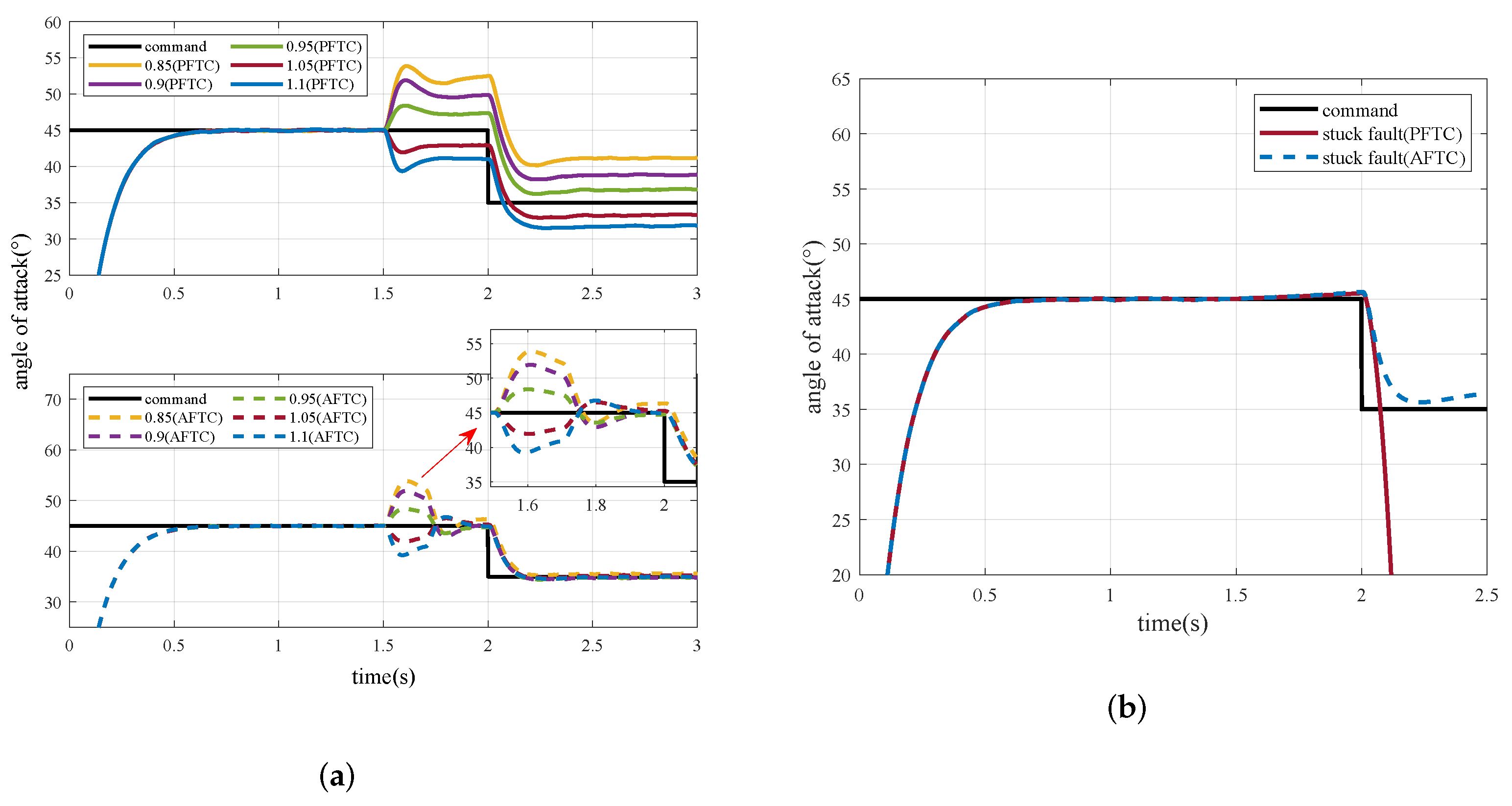
4.4. Simulations of AFTC
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AFTC | Active Fault-Tolerant Control |
| NSHV | Near-Space Hypersonic Vehicle |
| ADRC | Active Disturbance Rejection Control |
| KELM | Kernel Extreme Learning Machine |
| PFTC | Passive Fault-Tolerant Control |
| AFTC | Active Fault-Tolerant Control |
| FTC | Fault Tolerant Control |
| RCS | Reaction Control System |
| WPT | ThenWavelet Packet Transformation |
| ESO | Extended State Observer |
| TD | Tracking Differentiator |
| RBF | Radial Basis Function |
| LSM | Least Square Method |
| FDE | Fault Diagnosis and Evaluation |
| MSE | Mean Squared Error |
| Symbols | |
| x | horizontal position, m |
| z | vertical position, m |
| v | velocity, m/s |
| trajectory inclination angle, rad | |
| angle of attack, rad | |
| m | mass of NSHV, kg |
| g | gravitational acceleration, m/s |
| D | aerodynamic drag, N |
| propulsion, N | |
| Y | aerodynamic force, N |
| pitch angular rate, rad/s | |
| moment of inertia for the y coordinate axes, kg · m | |
| l | distance from the RCS to the center of mass, m |
| e | residual signal, rad |
| observation of the angle of attack, rad | |
| observation of angular velocity of attack, rad/s | |
| observation of total disturbance |
| tunable parameters | |
| estimated angle values of the current time, rad | |
| estimated angle values of the next time, rad | |
| derivative of , rad/s | |
| derivative of , rad/s | |
| desired signal, rad | |
| sampling time, s | |
| time constant, s | |
| output of sensors or actuators | |
| output under the stuck fault | |
| output under the gain variation fault | |
| output under the outlier data fault | |
| time of stuck fault occur, s | |
| time of gain variation fault occur, s | |
| time of outlier data fault occur, s | |
| gain variation fault size | |
| outlier data fault size | |
| the fault model | |
| O | output of ELM |
| m | number of neurons |
| the output weights | |
| activation function | |
| weights of neurons | |
| biases of neurons | |
| inputs of ELM | |
| H | hidden layer’s output |
| Moore-Penrose pseudoinverse of H | |
| T | target output |
| C | user-defined parameter |
| kernal function | |
| Control instruction of AFTC | |
| output of the sensor | |
| amount of compensation | |
| time of fault occur | |
| time when the fault is diagnosed | |
| coefficients calculated by LSM | |
| sign of the residual signal |
References
- Gao, K.; Song, J.; Wang, X.; Li, H. Fractional-order proportional-integral-derivative linear active disturbance rejection control design and parameter optimization for hypersonic vehicles with actuator faults. Tsinghua Sci. Technol. 2020, 26, 9–23. [Google Scholar] [CrossRef]
- Zhai, R.; Qi, R.; Zhang, J. Compound fault-tolerant attitude control for hypersonic vehicle with reaction control systems in reentry phase. ISA Trans. 2019, 90, 123–137. [Google Scholar] [CrossRef] [PubMed]
- Kai, Z.; Jia, S.; Xinlong, W. ESO-KELM-based minor sensor fault identification. J. China Univ. Posts Telecommun. 2021, 28, 53. [Google Scholar]
- Jiang, B.; Zhao, J.; Qi, R.; Xu, D.; He, N. Survey of fault diagnosis and fault-tolerant control for near space vehicles. J. Nanjing Univ. Aeronaut. Astronaut. 2012, 44, 603–610. [Google Scholar]
- Hu, H.; Wang, B.; Cheng, Z.; Liu, L.; Wang, Y.; Luo, X. A novel active fault-tolerant control for spacecrafts with full state constraints and input saturation. Aerosp. Sci. Technol. 2021, 108, 106368. [Google Scholar] [CrossRef]
- Amin, A.A.; Hasan, K.M. A review of fault tolerant control systems: Advancements and applications. Measurement 2019, 143, 58–68. [Google Scholar] [CrossRef]
- Wang, B.; Yu, X.; Mu, L.; Zhang, Y. A dual adaptive fault-tolerant control for a quadrotor helicopter against actuator faults and model uncertainties without overestimation. Aerosp. Sci. Technol. 2020, 99, 105744. [Google Scholar] [CrossRef]
- Tahavori, M.; Hasan, A. Fault recoverability for nonlinear systems with application to fault tolerant control of UAVs. Aerosp. Sci. Technol. 2020, 107, 106282. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Z.; Zhang, X.; Sun, Q.; Sun, M. A novel control scheme for quadrotor UAV based upon active disturbance rejection control. Aerosp. Sci. Technol. 2018, 79, 601–609. [Google Scholar] [CrossRef]
- Hu, K.; Chen, F.; Cheng, Z. Fuzzy Adaptive Hybrid Compensation for Compound Faults of Hypersonic Flight Vehicle. Int. J. Control Autom. Syst. 2021, 19, 2269–2283. [Google Scholar] [CrossRef]
- Wang, B.; Shen, Y.; Zhang, Y. Active fault-tolerant control for a quadrotor helicopter against actuator faults and model uncertainties. Aerosp. Sci. Technol. 2020, 99, 105745. [Google Scholar] [CrossRef]
- Rudin, K.; Ducard, G.J.; Siegwart, R.Y. Active fault-tolerant control with imperfect fault detection information: Applications to UAVs. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2792–2805. [Google Scholar] [CrossRef]
- Xu, B.; Qi, R.; Jiang, B. Adaptive fault-tolerant control for HSV with unknown control direction. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2743–2758. [Google Scholar] [CrossRef]
- Wu, T.; Wang, H.; Yu, Y.; Liu, Y.; Wu, J. Hierarchical fault-tolerant control for over-actuated hypersonic reentry vehicles. Aerosp. Sci. Technol. 2021, 119, 107134. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, H.; Li, N. Fault-tolerant control for over-actuated hypersonic reentry vehicle subject to multiple disturbances and actuator faults. Aerosp. Sci. Technol. 2019, 87, 230–243. [Google Scholar] [CrossRef]
- Han, J.; Liu, X.; Wei, X.; Hu, X.; Zhang, H. Reduced-order observer based fault estimation and fault-tolerant control for switched stochastic systems with actuator and sensor faults. ISA Trans. 2019, 88, 91–101. [Google Scholar] [CrossRef]
- Zhai, D.; An, L.; Li, X.; Zhang, Q. Adaptive fault-tolerant control for nonlinear systems with multiple sensor faults and unknown control directions. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 4436–4446. [Google Scholar] [CrossRef]
- Liu, Y.; Hong, S.; Zio, E.; Liu, J. Fault Diagnosis and Reconfigurable Control for Commercial Aircraft with Multiple Faults and Actuator Saturation. Aerospace 2021, 8, 108. [Google Scholar] [CrossRef]
- Ossmann, D.; Pusch, M. Fault Tolerant Control of an Experimental Flexible Wing. Aerospace 2019, 6, 76. [Google Scholar] [CrossRef] [Green Version]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Zio, E.; Chen, X. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. and Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Li, X.J.; Yang, G.H. Adaptive fault-tolerant synchronization control of a class of complex dynamical networks with general input distribution matrices and actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 2015, 28, 559–569. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Wu, L.; Shi, P.; Li, H. Sliding mode fault-tolerant control of uncertain system: A delta operator approach. Int. J. Robust Nonlinear Control 2017, 27, 4173–4187. [Google Scholar] [CrossRef]
- Li, H.; Gao, Y.; Shi, P.; Lam, H.K. Observer-based fault detection for nonlinear systems with sensor fault and limited communication capacity. IEEE Trans. Autom. Control 2015, 61, 2745–2751. [Google Scholar] [CrossRef]
- Dong, J.; Yang, G.H. Reliable state feedback control of T–S fuzzy systems with sensor faults. IEEE Trans. Fuzzy Syst. 2014, 23, 421–433. [Google Scholar] [CrossRef]
- Gao, K.; Song, J.; Yang, E. Stability analysis of the high-order nonlinear extended state observers for a class of nonlinear control systems. Trans. Inst. Meas. Control 2019, 41, 4370–4379. [Google Scholar] [CrossRef] [Green Version]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Ai, S.; Song, J.; Cai, G. A real-time fault diagnosis method for hypersonic air vehicle with sensor fault based on the auto temporal convolutional network. Aerosp. Sci. Technol. 2021, 119, 107220. [Google Scholar] [CrossRef]
- Ai, S.; Song, J.; Cai, G. Diagnosis of Sensor Faults in Hypersonic Vehicles Using Wavelet Packet Translation Based Support Vector Regressive Classifier. IEEE Trans. Reliab. 2021, 70, 901–915. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: A new learning scheme of feedforward neural networks. In Proceedings of the 2004 IEEE International Joint Conference on Neural Networks (IEEE Cat. No.04CH37541), Budapest, Hungary, 25–29 July 2004; Volume 2, pp. 985–990. [Google Scholar]
- Iosifidis, A.; Tefas, A.; Pitas, I. On the kernel extreme learning machine classifier. Pattern Recognit. Lett. 2015, 54, 11–17. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Anti-Interference | Actuator Fault Tolerance | Sensor Fault Tolerance |
|---|---|---|---|
| PFTC | ✓ | partly | ✓ |
| Previous AFTC | ✓ | ✓ | |
| AFTC proposed | ✓ | ✓ | ✓ |
| Fault Type | MSE Using the Proposed Method | MSE Using the Contrast Method |
|---|---|---|
| fault-free state | 0.00021 | 0.01092 |
| stuck fault | 0.00022 | 0.00471 |
| gain validation fault | 0.0114 | 0.01536 |
| outlier data fault | 0.00026 | 0.00016 |
| Fault Size | Static Error Using PFTC () | Static Error Using AFTC () |
|---|---|---|
| k = 0.85 | 6.28 | 0.49 |
| k = 0.9 | 3.76 | −0.33 |
| k = 0.95 | 1.71 | −0.2 |
| k = 1 | 0 | 0 |
| k = 1.05 | −1.82 | 0.14 |
| k = 1.1 | −3.31 | −0.14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K.; Song, J.; Ai, S.; Xu, X.; Liu, Y. Active Fault-Tolerant Control for Near-Space Hypersonic Vehicles. Aerospace 2022, 9, 237. https://doi.org/10.3390/aerospace9050237
Zhao K, Song J, Ai S, Xu X, Liu Y. Active Fault-Tolerant Control for Near-Space Hypersonic Vehicles. Aerospace. 2022; 9(5):237. https://doi.org/10.3390/aerospace9050237
Chicago/Turabian StyleZhao, Kai, Jia Song, Shaojie Ai, Xiaowei Xu, and Yang Liu. 2022. "Active Fault-Tolerant Control for Near-Space Hypersonic Vehicles" Aerospace 9, no. 5: 237. https://doi.org/10.3390/aerospace9050237