
Design of a DSP-Based Motion-Cueing Algorithm Using the Kinematic Solution for the 6-DoF Motion Platform


Abstract
:1. Introduction
2. Kinematics of the Six-DoF Motion Platform
2.1. Forward Kinematics
2.2. Inverse Kinematics
3. Motion-Cueing Algorithm
3.1. Classical Washout Algorithm Design
3.2. Optimal Control Algorithm Design
4. Simulation Results and Discussion
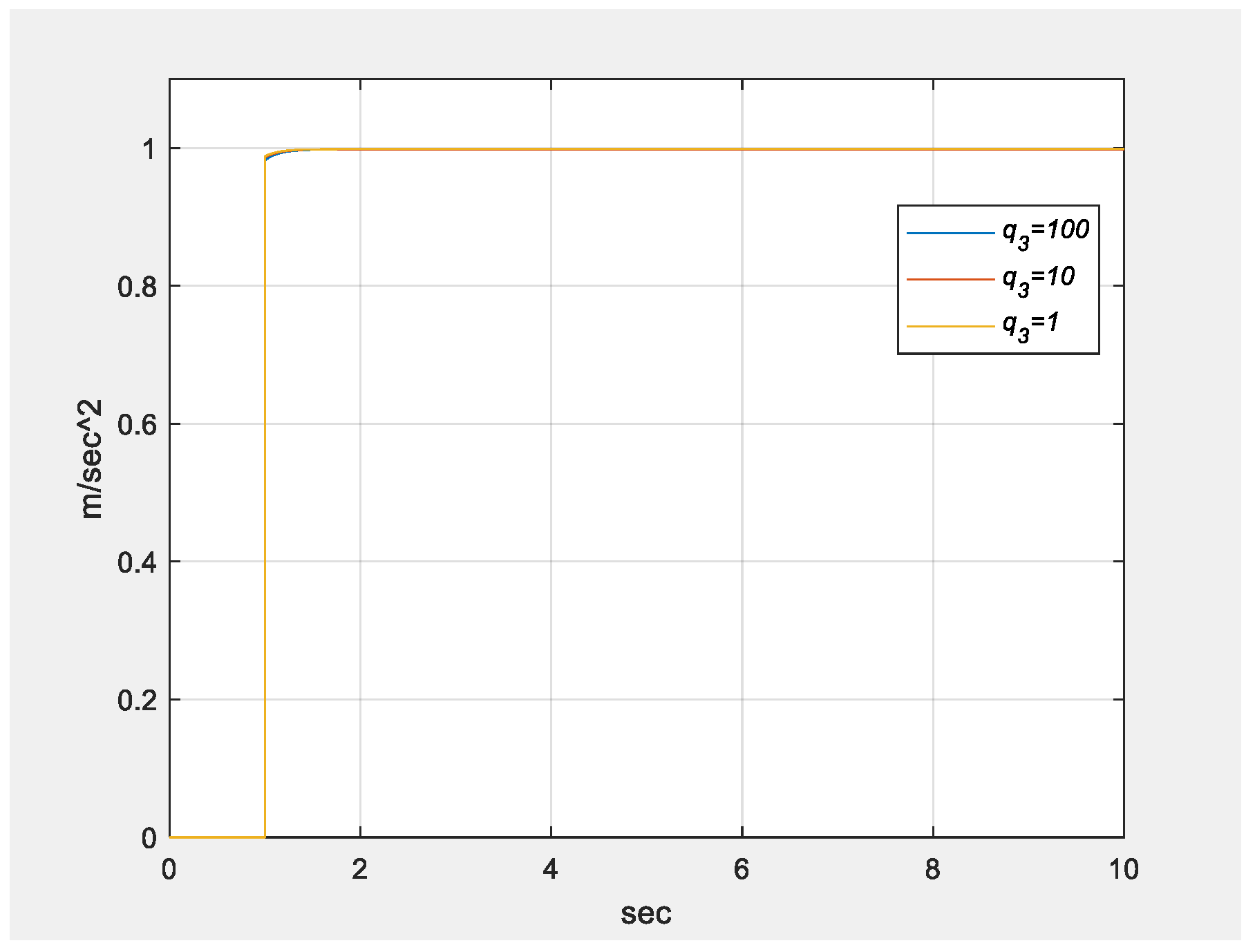
4.1. Specific Force Analysis
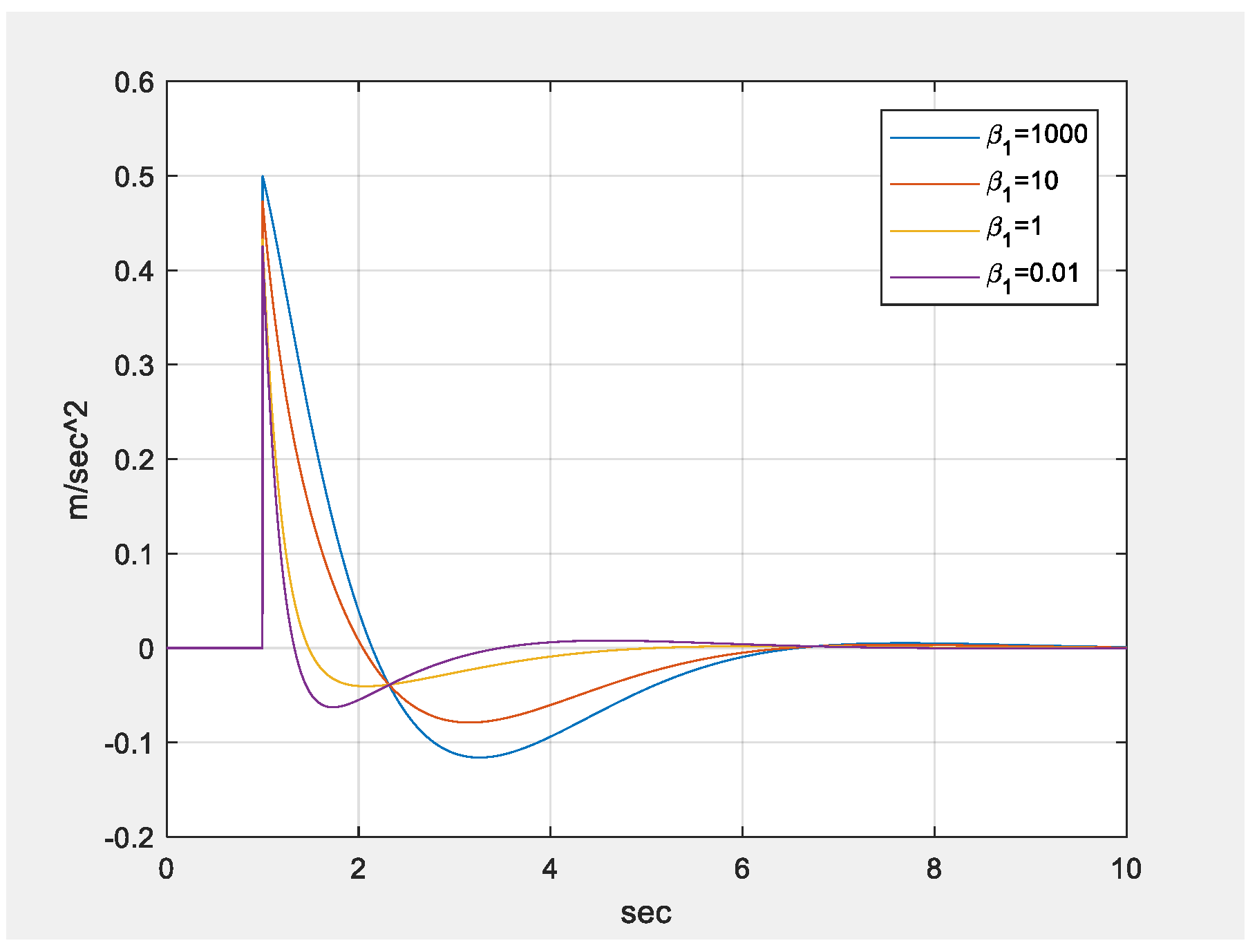
4.1.1. Influence of
4.1.2. Influence of
4.1.3. Influence of
4.1.4. Influence of
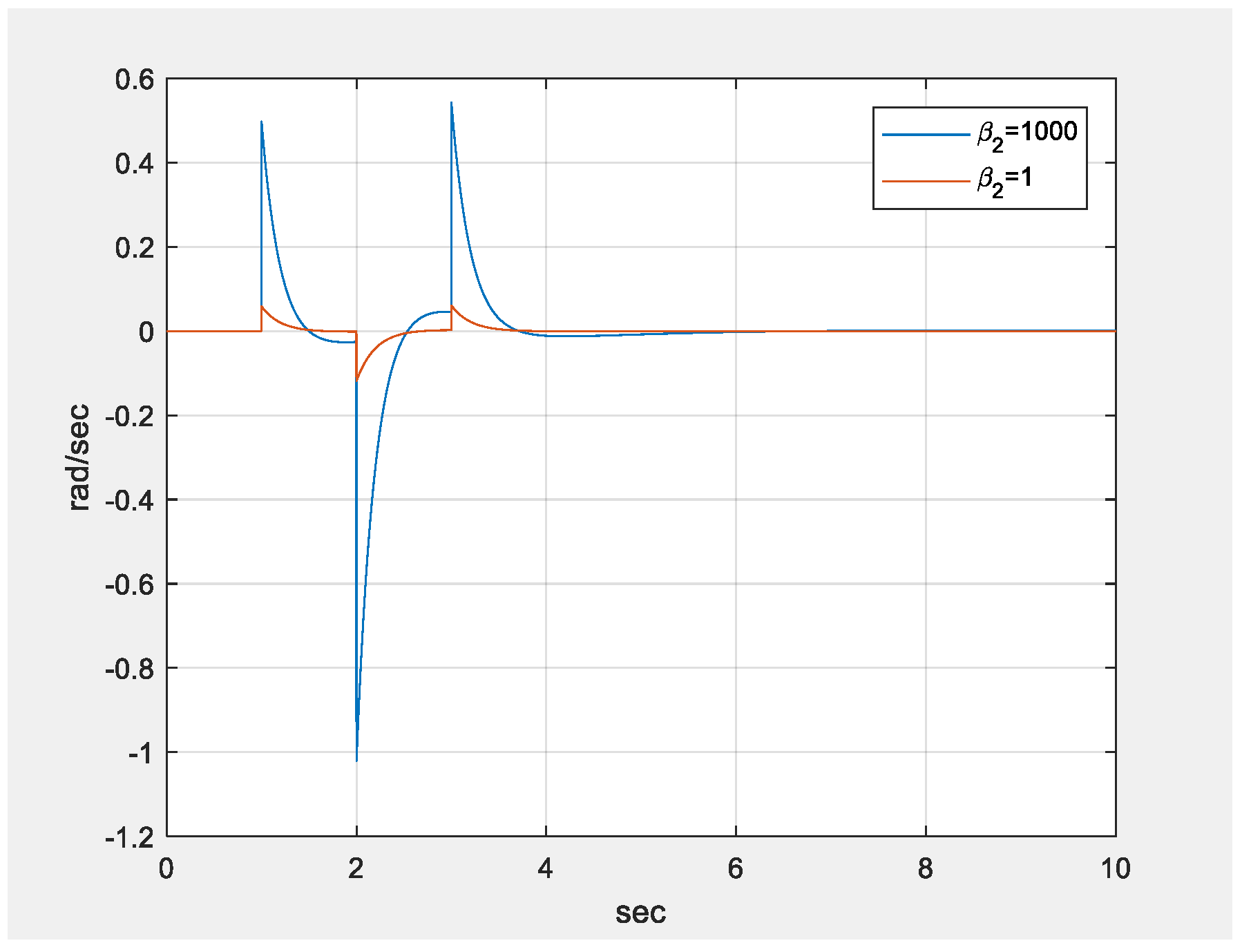
4.2. Angular Velocity Analysis
4.2.1. Influence of
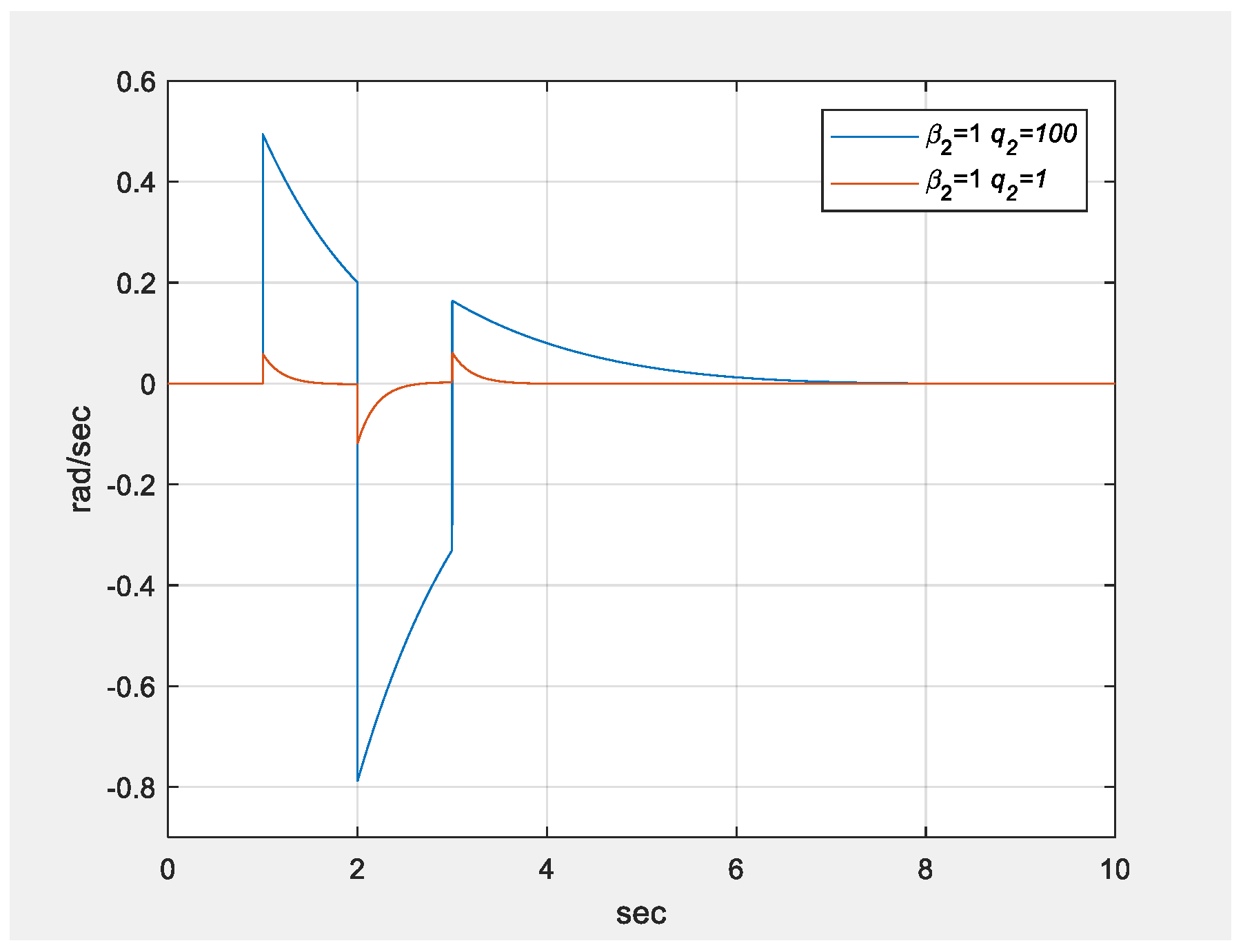
4.2.2. Influence of q2
4.2.3. Influence of
4.3. Comparison of the Two Motion-Cueing Algorithms
4.3.1. Comparison of Origin Drift
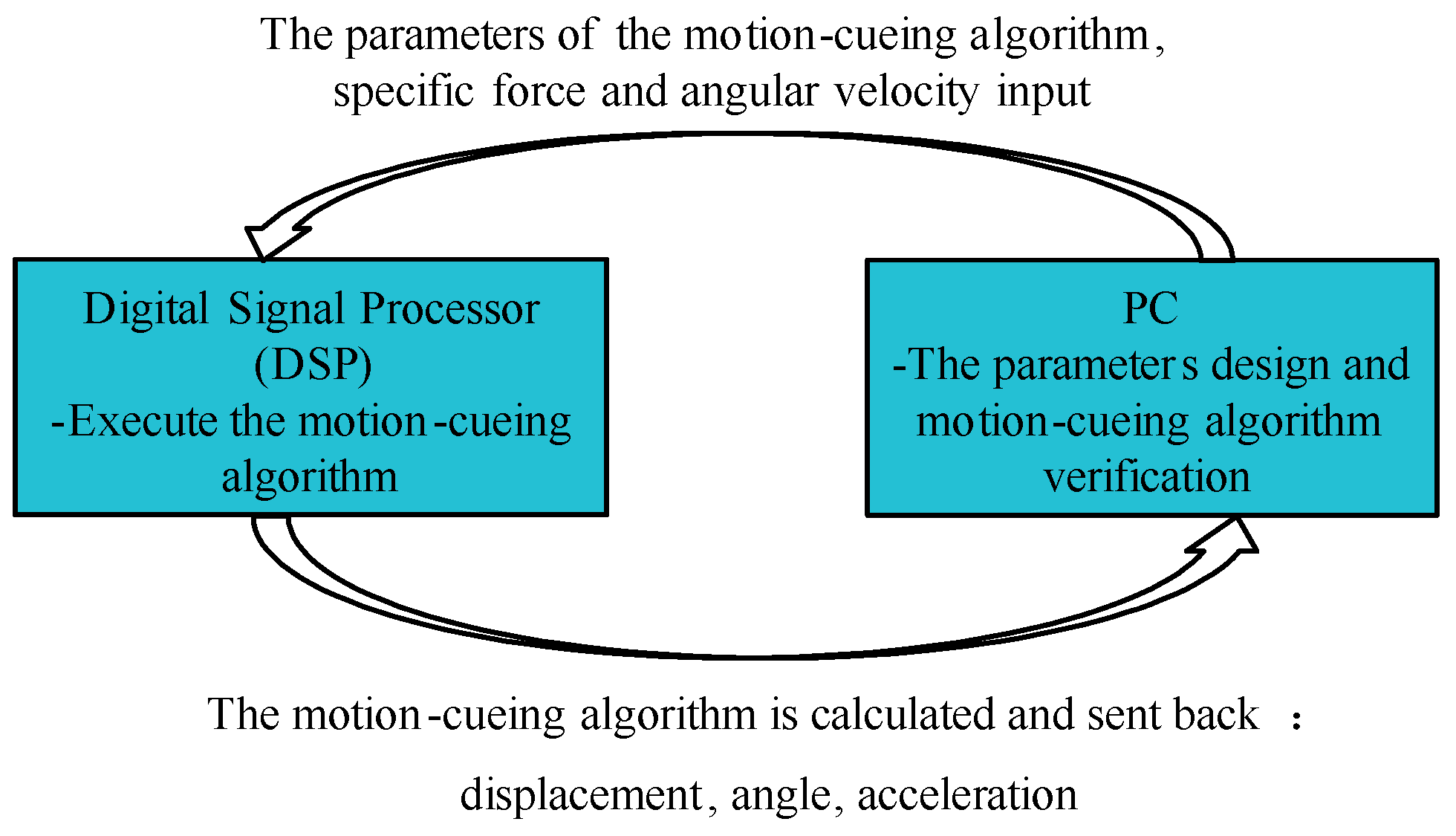
4.3.2. Comparison of the Control Architecture
5. Conclusions
Funding
Conflicts of Interest
References
- Wei, M.Y.; Yeh, Y.L.; Chen, S.W.; Wu, H.M.; Liu, J.W. Design, Analysis, and Implementation of a Four-DoF Chair Motion Mechanism. IEEE Access 2021, 9, 124986–124999. [Google Scholar] [CrossRef]
- Miller, R.; Hobday, M.; Leroux-Dermers, T.; Olleros, X. Innovation in complex industries: The case of flight simulators. Ind. Corp. Chang. 1995, 4, 363–400. [Google Scholar] [CrossRef]
- Stewart, D. A platform with six degrees of freedom. Proc. Inst. Mech. Eng. 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Raghavan, M. The Stewart platform of general geometry has 40 configurations. ASME Trans. J. Mech. Des. 1993, 115, 277–280. [Google Scholar] [CrossRef]
- Su, Y.X.; Duan, B.Y.; Zheng, C.H.; Zhang, Y.F.; Chen, G.D.; Mi, J.W. Disturbance-rejection high-precision motion control of a Stewart platform. IEEE Trans. Control Syst. Technol. 2004, 12, 364–374. [Google Scholar] [CrossRef]
- Yun, Y.; Li, Y. A general dynamics and control model of a class of multi-DOF manipulators for active vibration control. Mech. Mach. Theory 2011, 46, 1549–1574. [Google Scholar] [CrossRef]
- Su, Y.X.; Duan, B.Y. The mechanical design and kinematics accuracy analysis of a fine tuning stable platform in large spherical raio telescope. Mechatronics 2000, 10, 819–834. [Google Scholar] [CrossRef]
- Wang, Q.; Jiao, W.; Yu, R.; Johnson, M.T.; Zhang, Y. Virtual reality robot-assisted welding based on human intention recognition. IEEE Trans. Autom. Sci. Eng. 2020, 17, 799–808. [Google Scholar] [CrossRef]
- Casas-Yrurzum, S.; Portalés-Ricart, C.; Morillo-Tena, P.; Cruz-Neira, C. On the Objective Evaluation of Motion Cueing in Vehicle Simulations. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3001–3013. [Google Scholar] [CrossRef]
- Qazani, M.R.C.; Asadi, H.; Bellmann, T.; Mohamed, S.; Lim, C.P.; Nahavandi, S. Adaptive Washout Filter Based on Fuzzy Logic for a Motion Simulation Platform With Consideration of Joints’ Limitations. IEEE Trans. Veh. Technol. 2020, 69, 12547–12558. [Google Scholar] [CrossRef]
- He, Z.; Lian, B.; Li, Q.; Zhang, Y.; Song, Y.; Yang, Y.; Sun, T. An error identification and compensation method of a 6-DoF parallel kinematic machine. IEEE Access 2020, 8, 119038–119047. [Google Scholar] [CrossRef]
- Nabi, H.N.; Ullah, S.; Munir, A. Kinematics analysis of three-degree-of freedom parallel manipulator with crank arm actuator. In Proceedings of the 2014 11th International Bhurban Conference on Applied Sciences & Technology (IBCAST), Islamabad, Pakistan, 14–18 January 2014; pp. 182–188. [Google Scholar]
- Pan, C.T.; Sun, P.Y.; Li, H.J.; Hsieh, C.H.; Hoe, Z.Y.; Shiue, Y.L. Development of multi-axis crank linkage motion system for synchronized flight simulation with VR immersion. Appl. Sci. 2021, 11, 3596. [Google Scholar] [CrossRef]
- Wei, M.Y. Design and Implementation of Inverse Kinematics and Motion Monitoring System for 6DoF Platform. Appl. Sci. 2021, 11, 9330. [Google Scholar] [CrossRef]
- Giordano, P.R.; Masone, C.; Tesch, J.; Breidt, M.; Pollini, L.; Bülthoff, H.H. A novel framework for closed-loop robotic motion simulation-part II: Motion cueing design and experimental validation. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3896–3903. [Google Scholar]
- Fan, S.W. Aviation physiology training in military aviation of the future Transformation through technology. In Proceedings of the 2017 Fourth Asian Conference on Defence Technology-Japan (ACDT), Tokyo, Japan, 29 November–1 December 2017; pp. 1–5. [Google Scholar]
- Berthoz, A.; Bles, W.; Bülthoff, H.H.; Grácio, B.C.; Feenstra, P.; Filliard, N.; Hühne, R.; Kemeny, A.; Mayrhofer, M.; Mulder, M.; et al. Motion scaling for high-performance driving simulators. IEEE Trans. Hum. Mach. Syst. 2013, 43, 265–276. [Google Scholar] [CrossRef]
- Asadi, H.; Lim, C.P.; Mohamed, S.; Nahavandi, D.; Nahavandi, S. Increasing motion fidelity in driving simulators using a fuzzy-based washout filter. IEEE Trans. Intell. Veh. 2019, 4, 298–308. [Google Scholar] [CrossRef]
- Salisbury, I.G.; Limebeer, D.J.N. Optimal motion cueing for race cars. IEEE Trans. Control Syst. Technol. 2015, 24, 200–215. [Google Scholar] [CrossRef]
- Zhao, Q.; Duan, G. Adaptive finite-time tracking control of 6dof spacecraft motion with inertia parameter identification. IET Control Theory Appl. 2019, 13, 2075–2085. [Google Scholar] [CrossRef]
- Asadi, H.; Mohamed, S.; Lim, C.P.; Nahavandi, S. Robust optimal motion cueing algorithm based on linear quadratic regular method and a genetic algorithm. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 238–254. [Google Scholar]
- Zhiyong, T.; Hu, M.; Zhongcai, P.; Jinhui, Z. Adaptive motion cueing algorithm based on fuzzy tuning for improving human sensation. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 1200–1205. [Google Scholar]
- Qazani, M.R.C.; Asadi, H.; Khoo, S.; Nahavandi, S. A linear time-varying model predictive control-based motion cueing algorithm for hexapod simulation-based motion platform. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 6096–6110. [Google Scholar] [CrossRef]
- Sivan, R.; Ish-Shalom, J.; Huang, J.K. An optimal control approach to the design of moving flight simulators. IEEE Trans. Syst. Man Cybern. Syst. 1982, 12, 818–827. [Google Scholar] [CrossRef]
- Kwakernaak, H.; Sivan, R. Linear Optimal Control Systems; Wiley-Interscience: New York, NY, USA, 1972. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Command | Parameters | Figure | Specifications | ||
|---|---|---|---|---|---|
| Settling Time (s) | Steady State Value (m/s2) | ||||
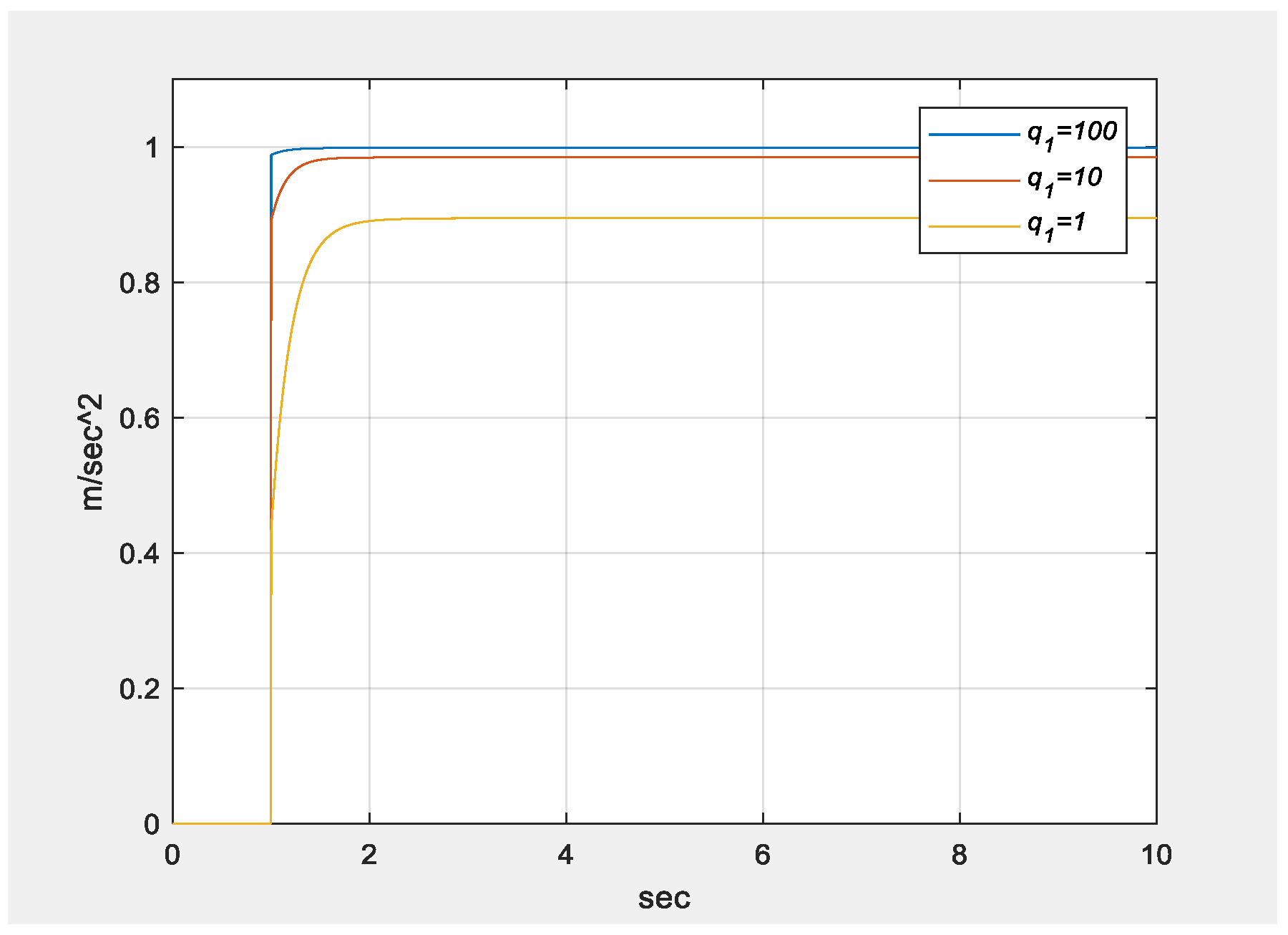
| Step-input (m/s2) 0, t < 1 +1, t > 1 | = 1, = 1, = 1, = 0, = 1, = 1, = 1 | = 1 | Figure 9 | 2.9 | 0.42 |
| 2 | 0.613 | ||||
| 1.5 | 0.893 | ||||
| 1.2 | 0.987 | ||||
| Figure 12 | 0.3 | 0.999 | |||
| 0.6 | 0.989 | ||||
| 1.5 | 0.893 | ||||
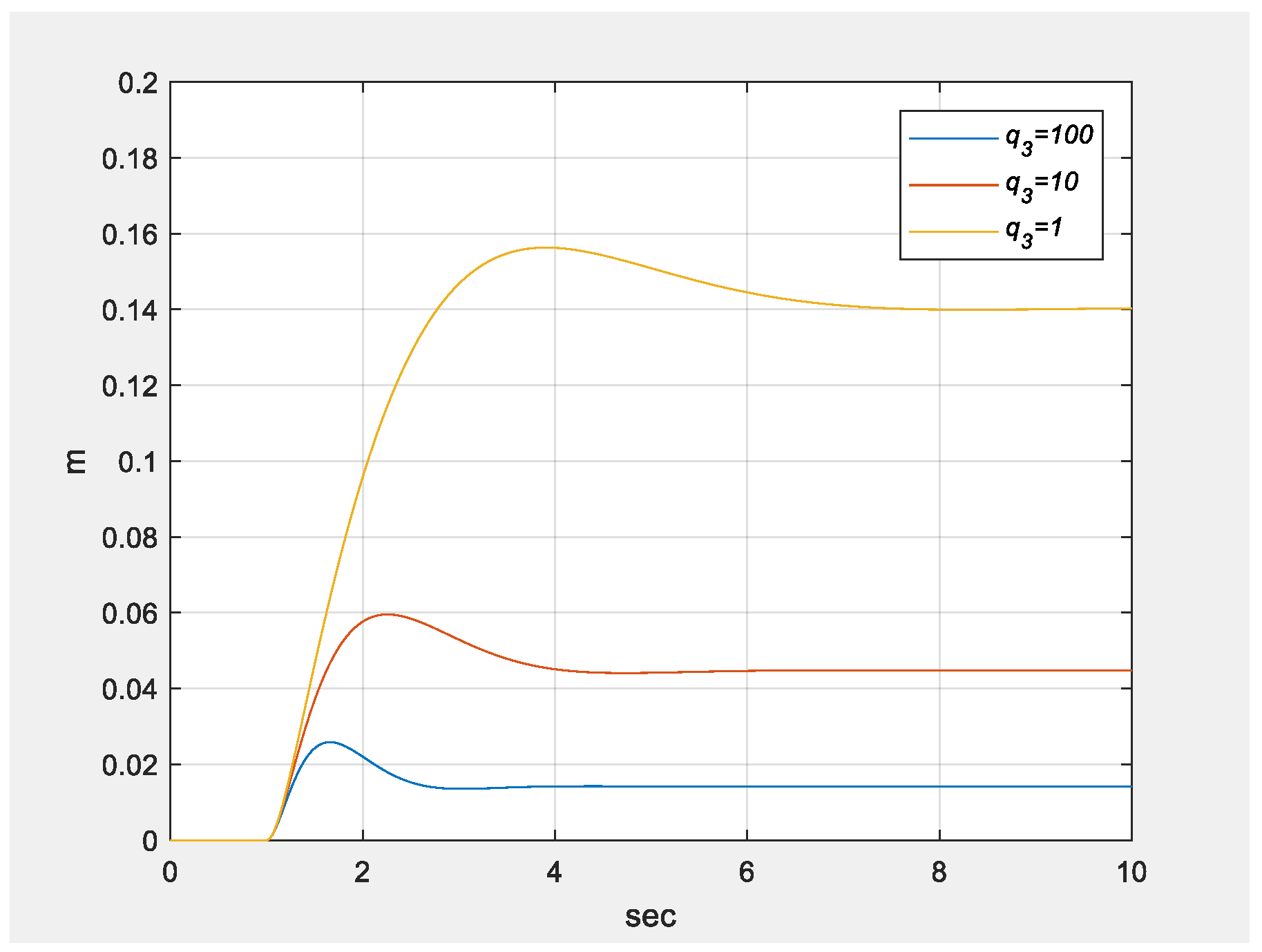
| Figure 15 | 0.4 | 0.895 | |||
| 0.5 | 0.93 | ||||
| 0.6 | 0.989 | ||||
| Input Command | Parameters | Figure | Specifications | ||
|---|---|---|---|---|---|
| Settling Time (s) | Peak to Peak Value | ||||
| Step-input (rad/s) +1, 1 ≤ t ≤ 2 −1, 2 ≤ t ≤ 3 0, elswhere | = 1, = 1, = 1, = 0, = 1, = 1 | = 1000, = 1, = 1 | Figure 24 | 4.6 | 1.53 (rad/s) |
| = 1, = 1, = 1 | 2.7 | 0.15 (rad/s) | |||
| = 1, = 100, = 1 | Figure 25 | 6 | 1.25 (rad/s) | ||
| = 1, = 1, = 1 | 2.6 | 0.17 (rad/s) | |||
| = 1, = 100, = 100 | Figure 26 | 4.8 | 0.39 (rad) | ||
| = 1, = 100, = 1 | 5.3 | 0.53 (rad) | |||
| Classical Washout Algorithm | Optimal Control Algorithm | |
|---|---|---|
| Type | Filter-based | Optimization-based |
| Real-time capable | High | Medium |
| Scalability | High | High |
| Implementation complexity | High | Medium |
| Accounting for simulator limits | Through manual tuning | Through cost function optimization |
| Computation time | 800 μs | 136 μs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, M.-Y. Design of a DSP-Based Motion-Cueing Algorithm Using the Kinematic Solution for the 6-DoF Motion Platform. Aerospace 2022, 9, 203. https://doi.org/10.3390/aerospace9040203
Wei M-Y. Design of a DSP-Based Motion-Cueing Algorithm Using the Kinematic Solution for the 6-DoF Motion Platform. Aerospace. 2022; 9(4):203. https://doi.org/10.3390/aerospace9040203
Chicago/Turabian StyleWei, Ming-Yen. 2022. "Design of a DSP-Based Motion-Cueing Algorithm Using the Kinematic Solution for the 6-DoF Motion Platform" Aerospace 9, no. 4: 203. https://doi.org/10.3390/aerospace9040203