
Trajectory Optimization with Complex Obstacle Avoidance Constraints via Homotopy Network Sequential Convex Programming

Abstract
:1. Introduction
- The general idea of the homotopy technique is to solve a series of simple transition problems so that the solution of the transition problem gradually approaches the optimal solution of the primal problem. This method reduces the problem’s difficulty, thereby significantly improving the success rate of trajectory planning [4,23,24,25,26,27]. Taheri [23,24] and Saranathan [25] first used the homotopy method to convert a multi-point boundary value problem into an easier-to-solve two-point boundary value problem, thereby dealing with multiple propulsion modes and dynamic environments. Malyuta [26] combined the homotopy method with the SCP algorithm to solve trajectory planning in a rendezvous maneuver under the constraints of discrete logic.
- As an auxiliary tool for trajectory optimization, the neural network can effectively improve the performance of traditional algorithms [28,29,30,31,32,33]. Yin [28] proposed a trajectory planning method based on a neural network, thus improving the indirect method’s convergence rate. Tang [29] and Banerjee [31] used the neural network to fit the initial reference trajectory offline. The SCP algorithm iterates from the reference trajectory predicted by the network, which can effectively reduce the number of iterations. Li [30] used a neural network predictor to estimate the optimal flight time. Only one SOCP needs to be solved online, significantly improving real-time performance.
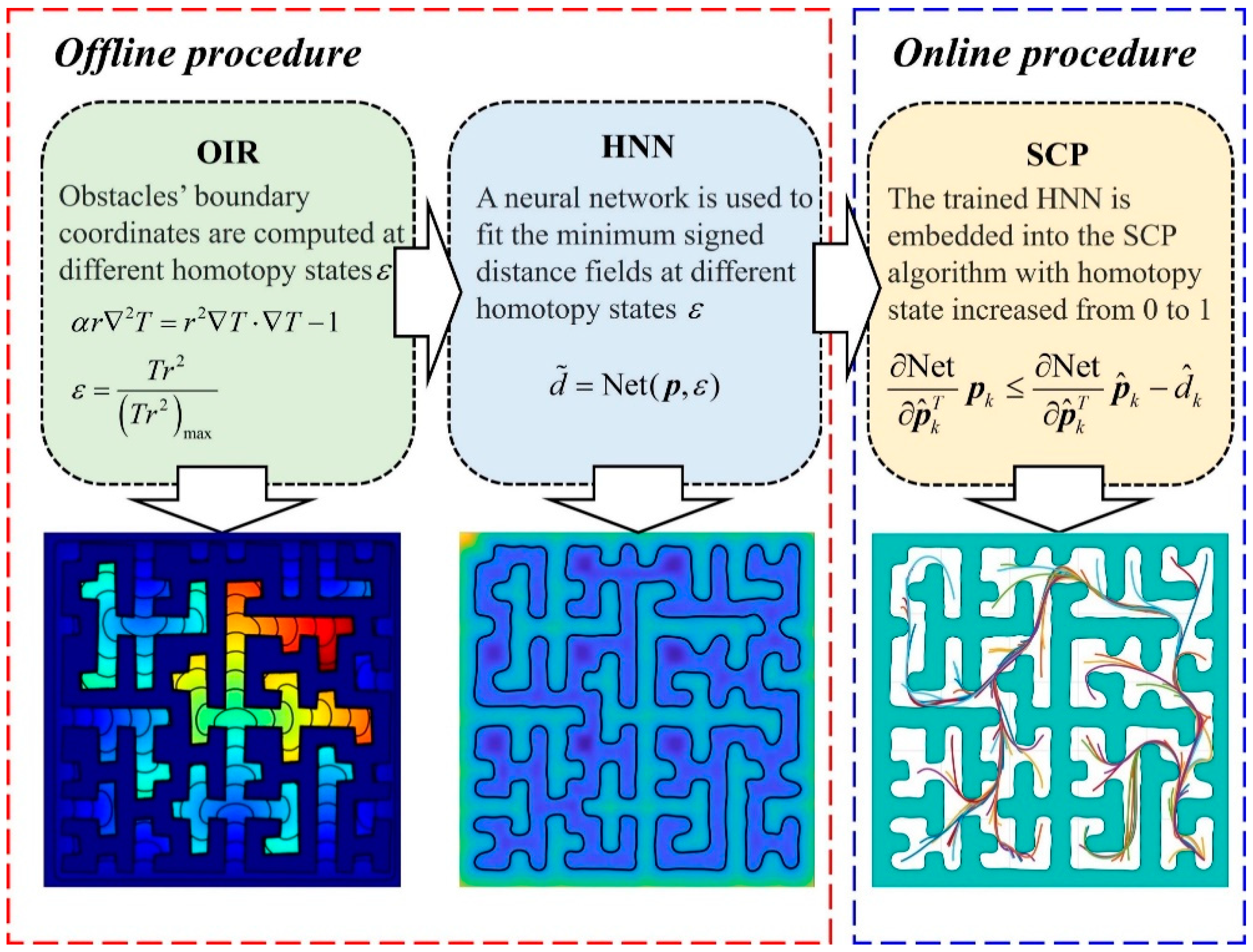
- A universal obstacle regression method, namely OIR, is proposed. To the best of our knowledge, this is the first attempt to apply OIR to the trajectory planning field.
- After introducing OIR and the HNN, the algorithm supported the modeling of arbitrary complex OACs, thus greatly expanding the application scenarios of SCP.
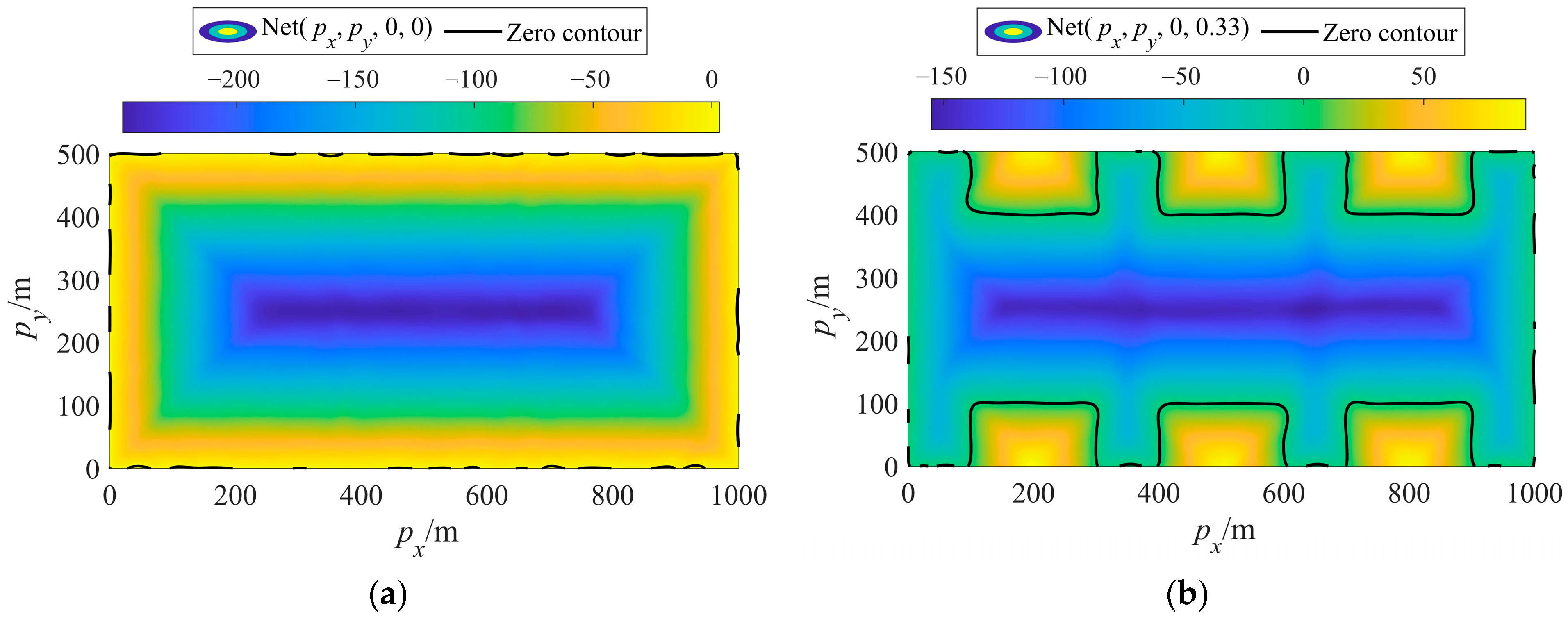
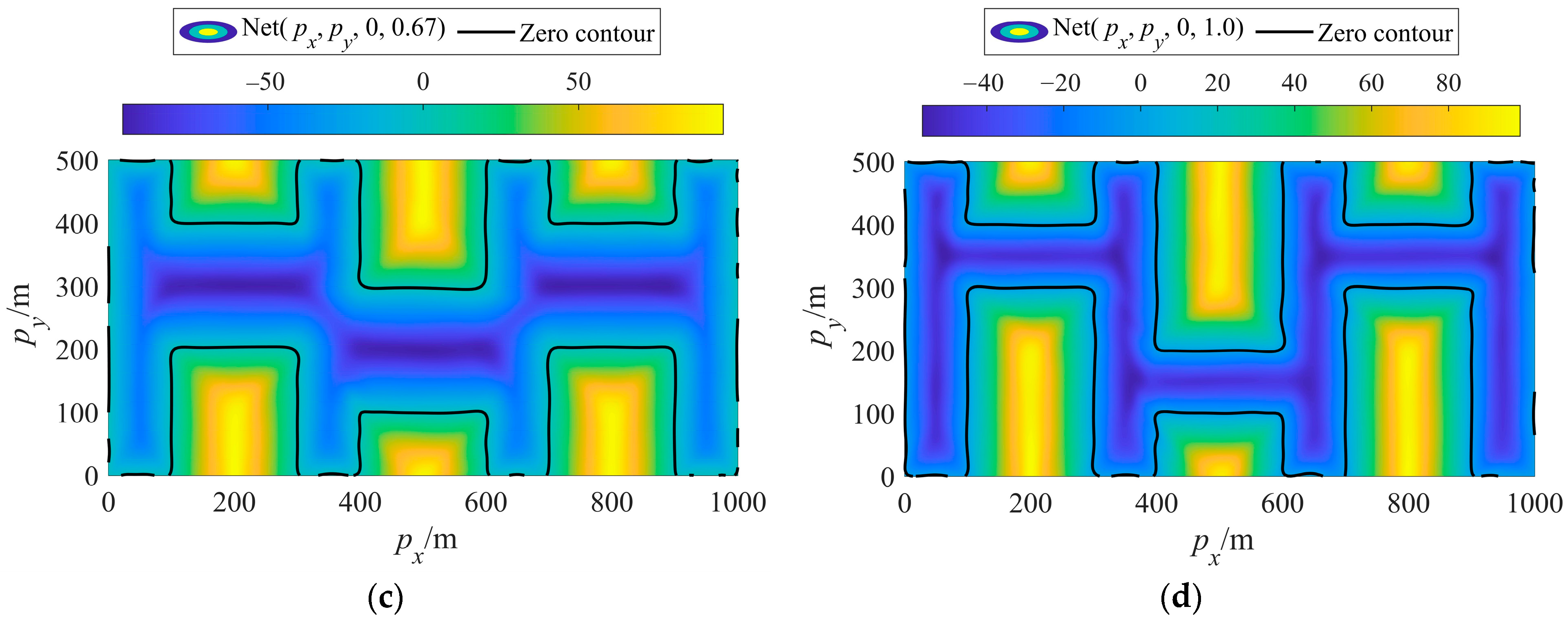
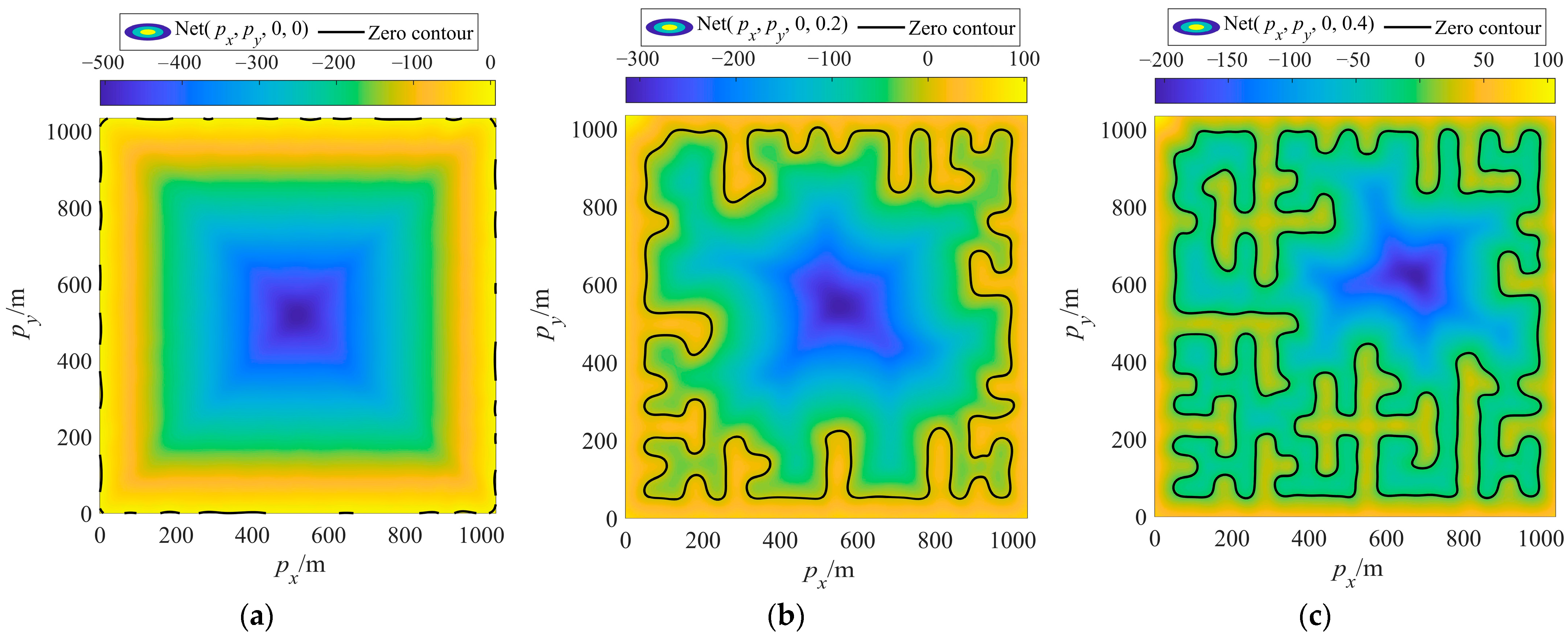
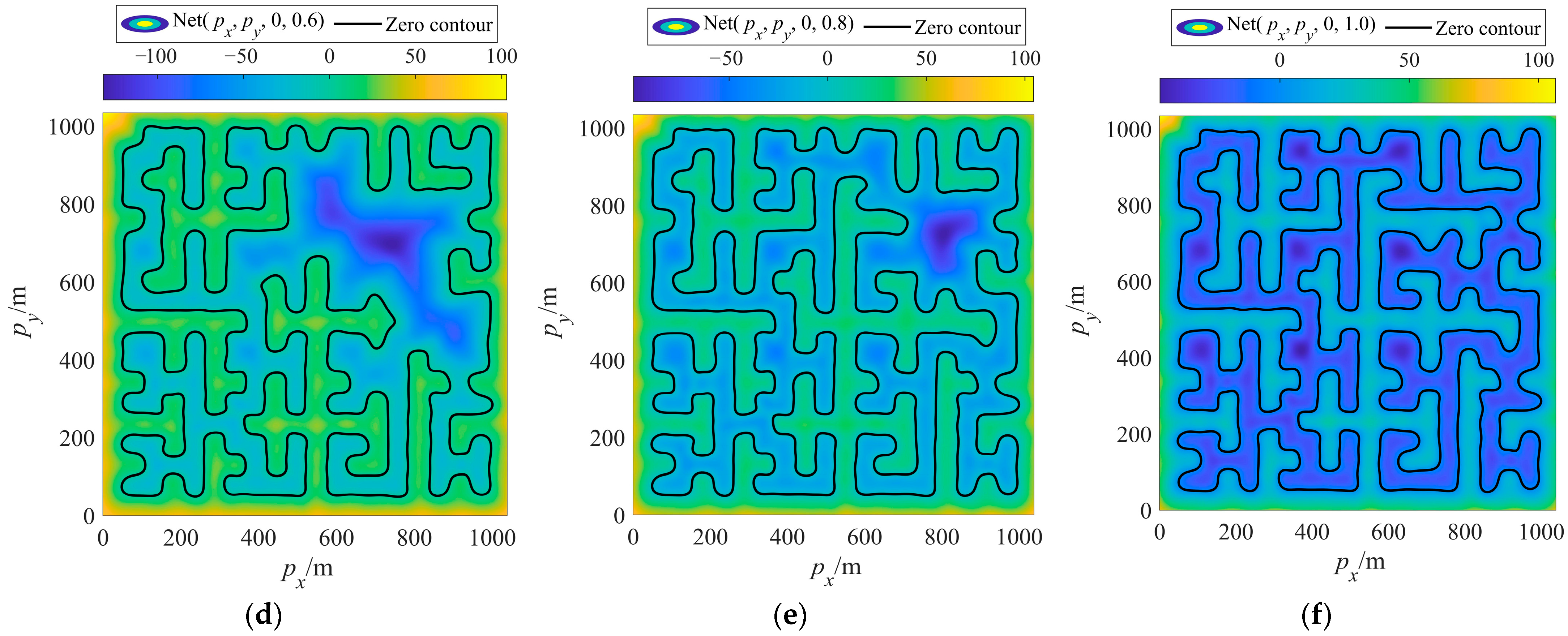
- The homotopy parameter can be flexibly updated by changing the input parameters of the HNN, thereby realizing the smooth transition from simple obstacles to complex ones. The convergence and optimality of the SCP algorithm were greatly improved. Numerical simulations showed that the HNSCP algorithm converges well, even with the most straightforward linear interpolated initial reference trajectory.
- After introducing the HNN, MSD fields with different homotopy parameters could be fitted with only a small amount of data. The data storage was significantly reduced, which is vital for online applications.
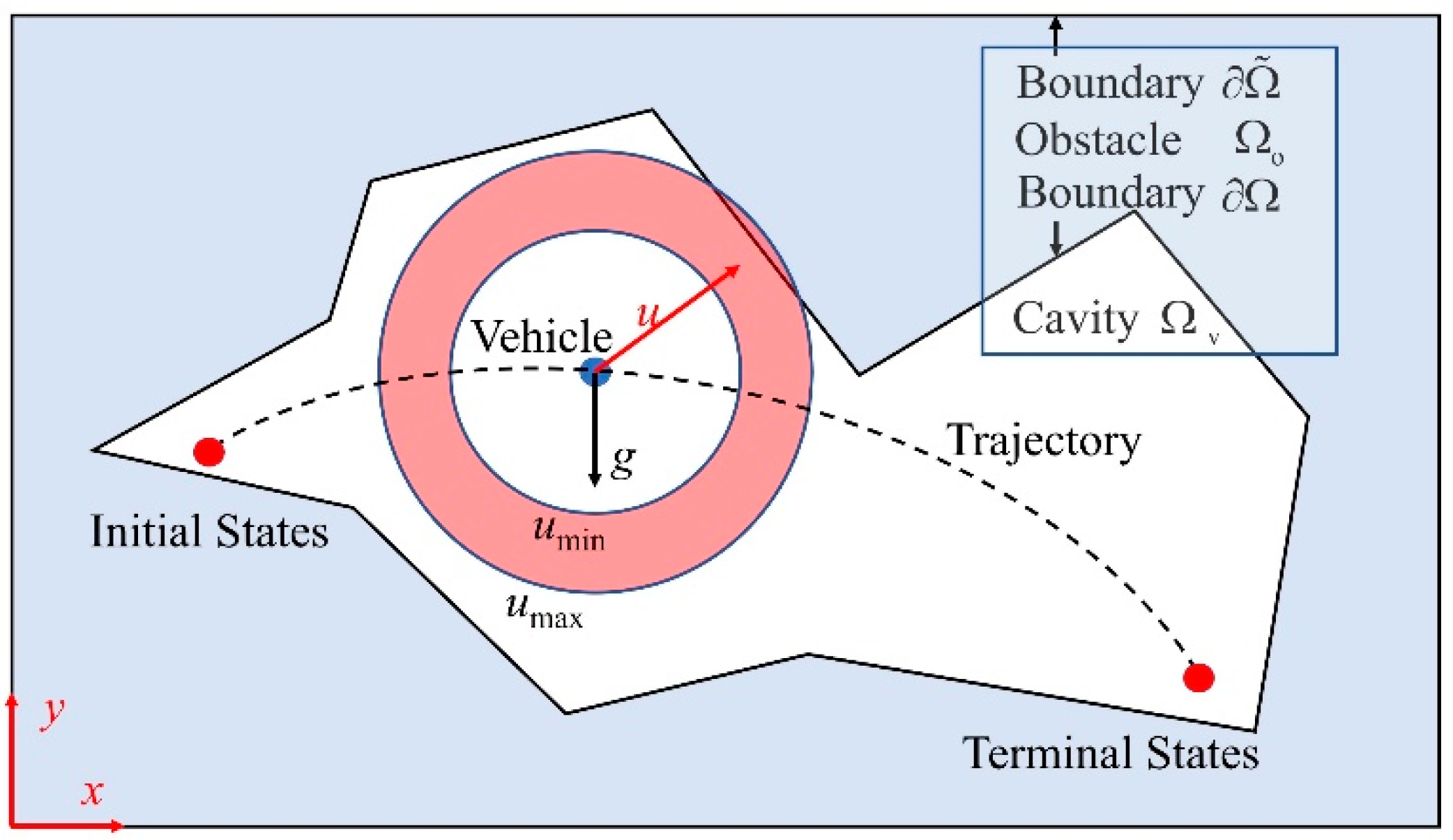
2. Problem Statement
3. HNSCP Algorithm
4. Online Procedure
4.1. Discretization and Convexification
4.1.1. Discretization
4.1.2. Convexification of Dynamical Equations
4.1.3. Convexification of Obstacle Avoidance Constraints
4.1.4. Convexification of Control Magnitude Constraints
4.1.5. Convexification of Cost Function
4.2. Successive Iterative Algorithm
| Algorithm 1: Online Procedure of Homotopy Network Sequential Convex Programming (HNSCP) |
| Step 1: Algorithm initialization. Set the maximum number of iterations . Set the penalty coefficient , and . Set the iteration convergence criterion , , . Set the increment step of the homotopy variable . Set the homotopy variable ; Step 2: Set initial reference variables, , , , , , according to Algorithm 2; For i = 0: |
| If |
| Else |
| End Step 3: Solve Problem 2, and the obtained solution is used to update the reference variables , , , , ; |
| If , , and |
| A convergent solution , , , , is obtained; Return; |
| End |
| End |
| Step 4: Fail to converge; Return; |
| Algorithm 2: Initialization of HNSCP’s Reference Variables |
| Step 1: Obtain the initial states and the terminal states Step 2: Set the reference speed constant ; Step 3: Set the linear reference variables; ; For k = 1: N |
| ; ; ; ; |
| End |
| Return; |
5. Offline Procedure
5.1. Obstacle Interface Regression Approach
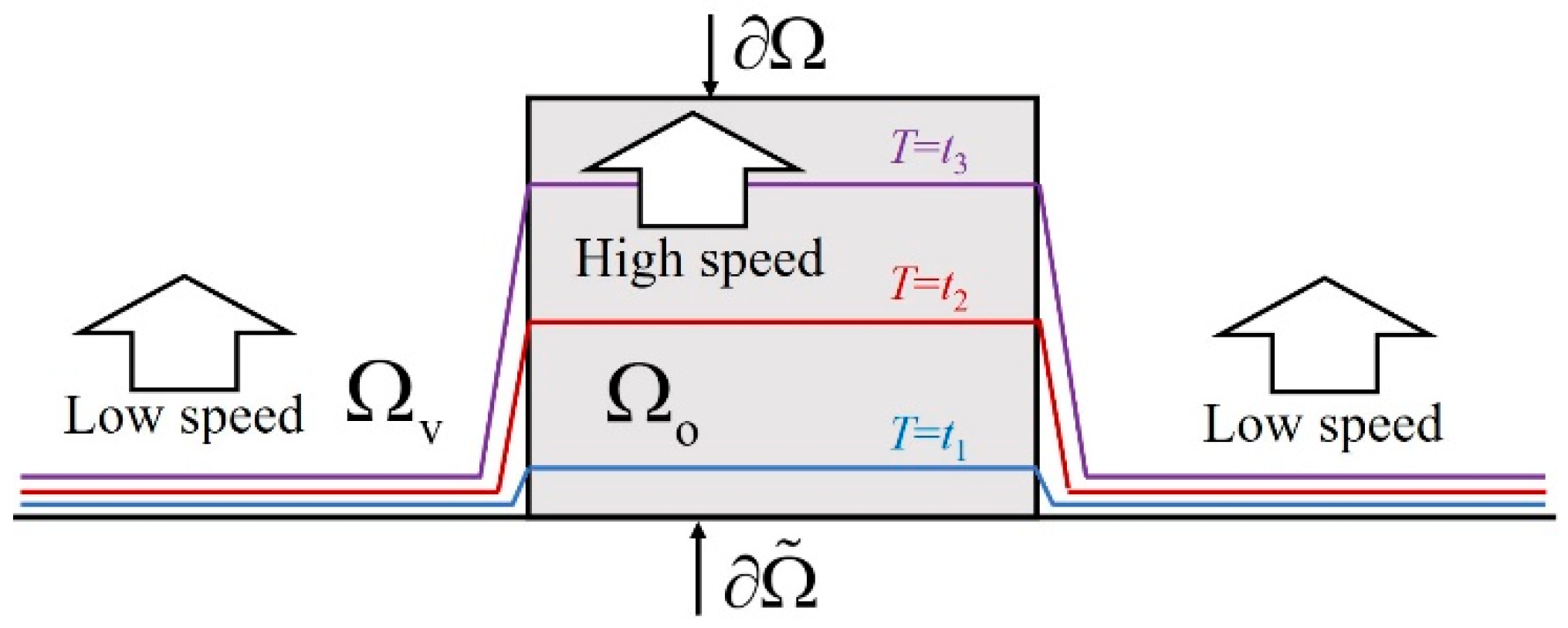
5.1.1. Basic Principles
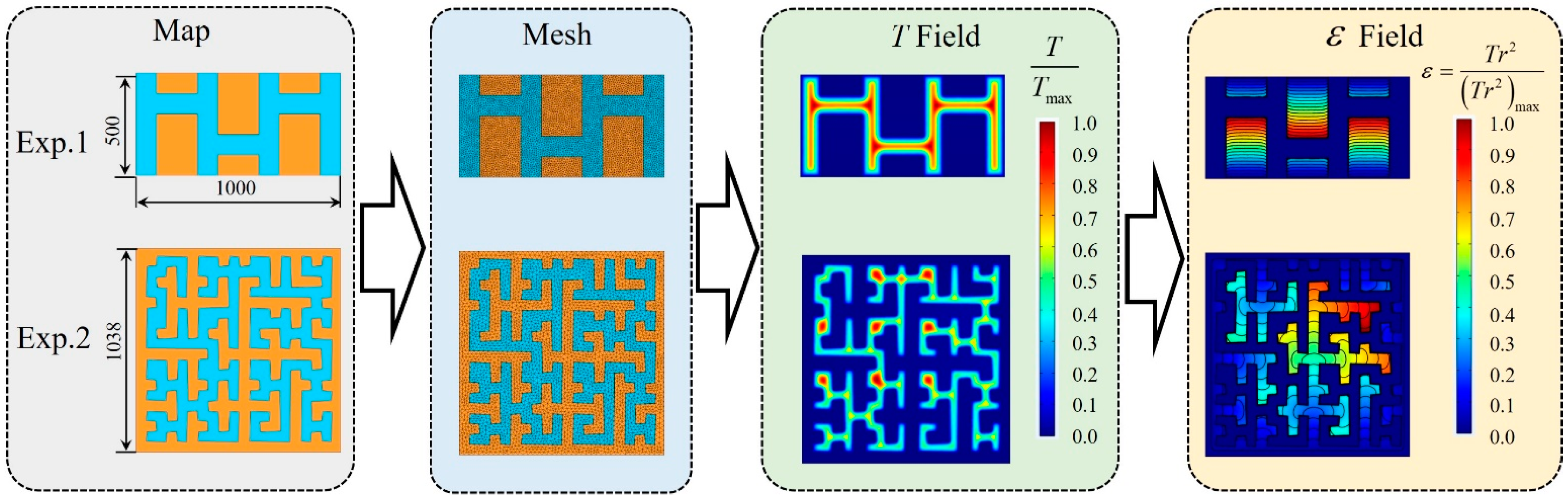
5.1.2. Implementation
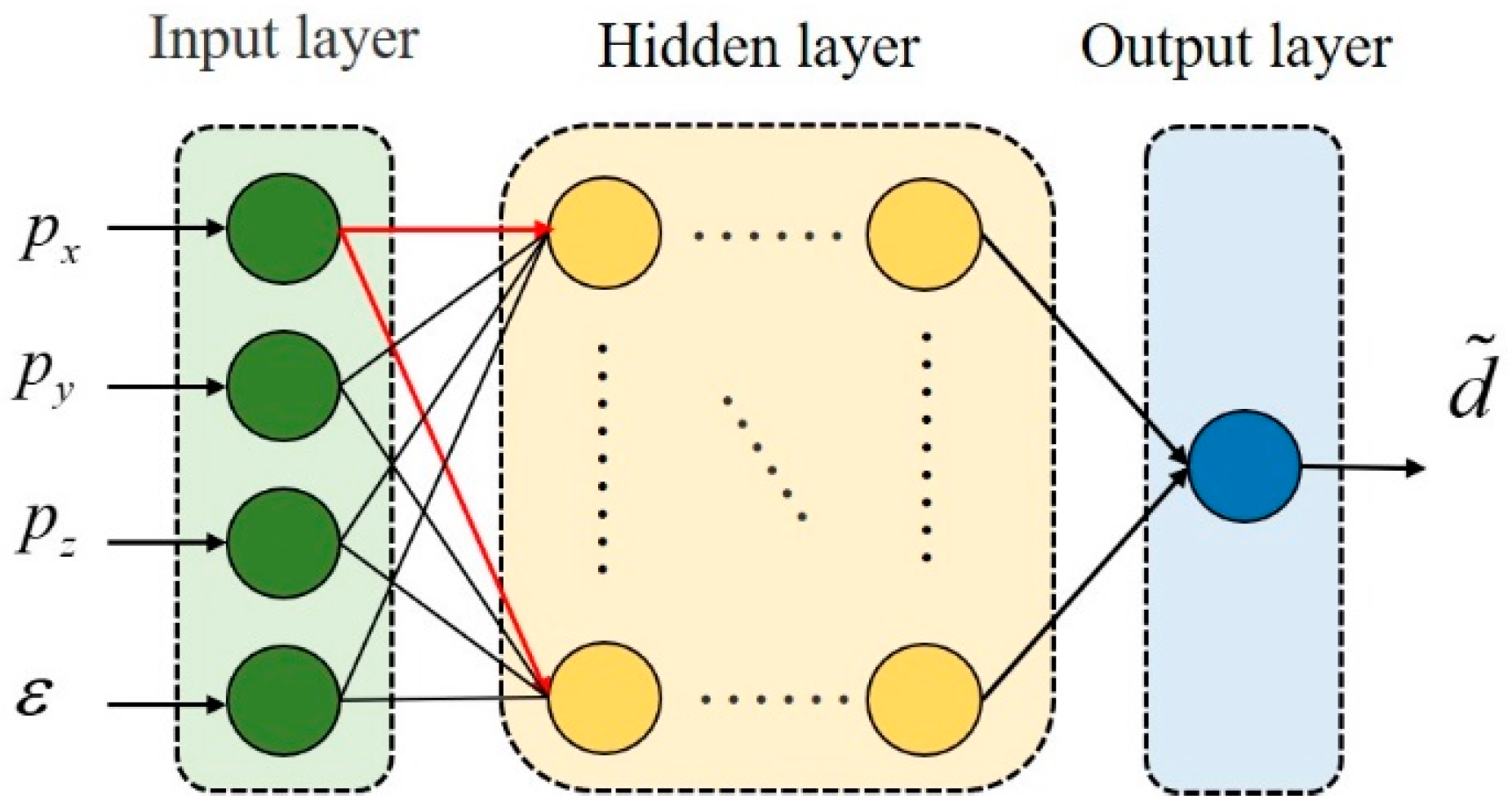
5.2. Homotopy Neural Network
5.2.1. Structure
5.2.2. Sample Generation
5.2.3. Training
| Algorithm 3: Sample Generation | |
| Step 1: Obtain the output of the OIR algorithm: , and . Step 2: Generate n random samples , where and ; For i = 1: n | |
| Step 3: Compute the MSD according to (6); Step 4: Store the data in the sample set; | |
| End | |
| Return; | |
6. Numerical Examples
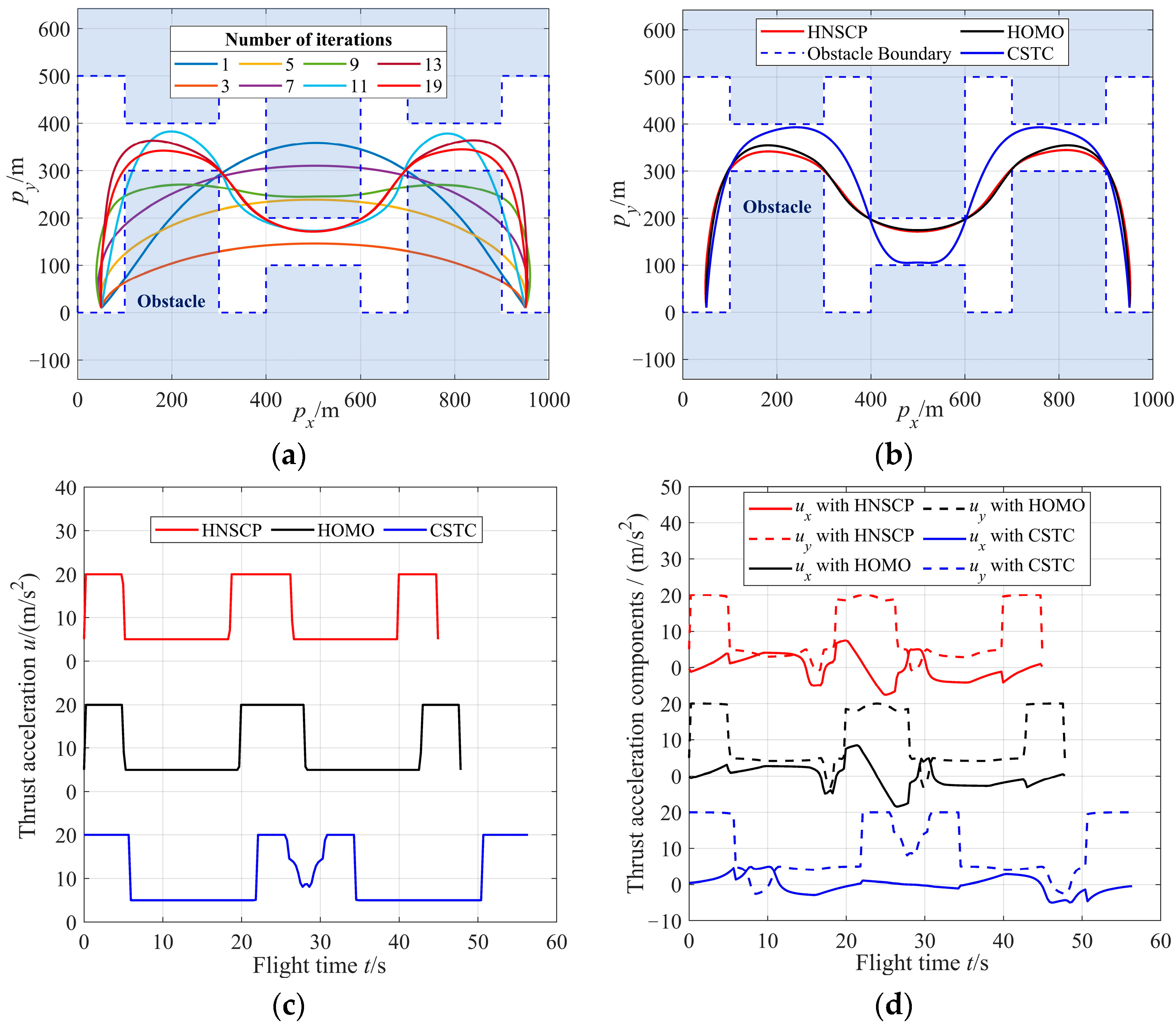
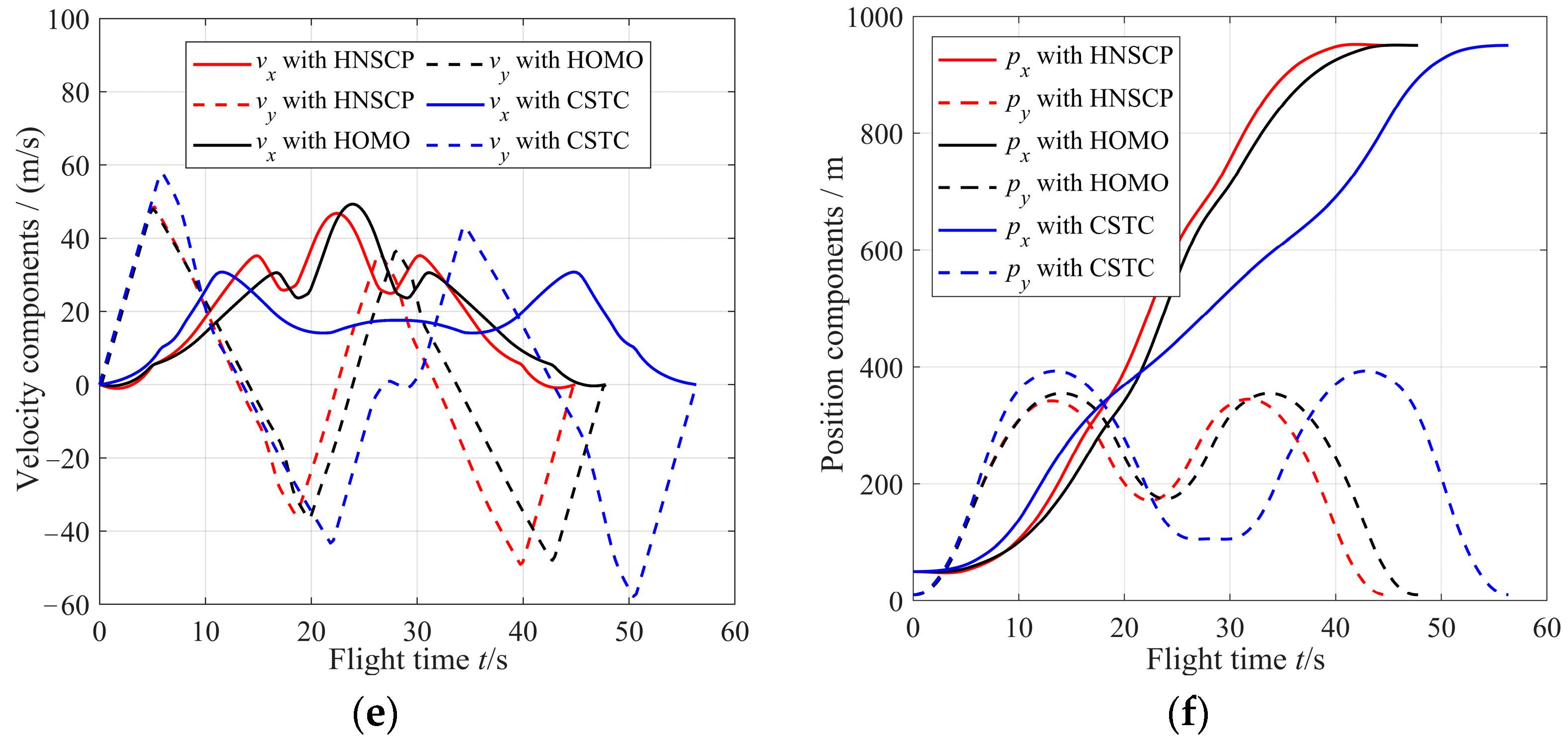
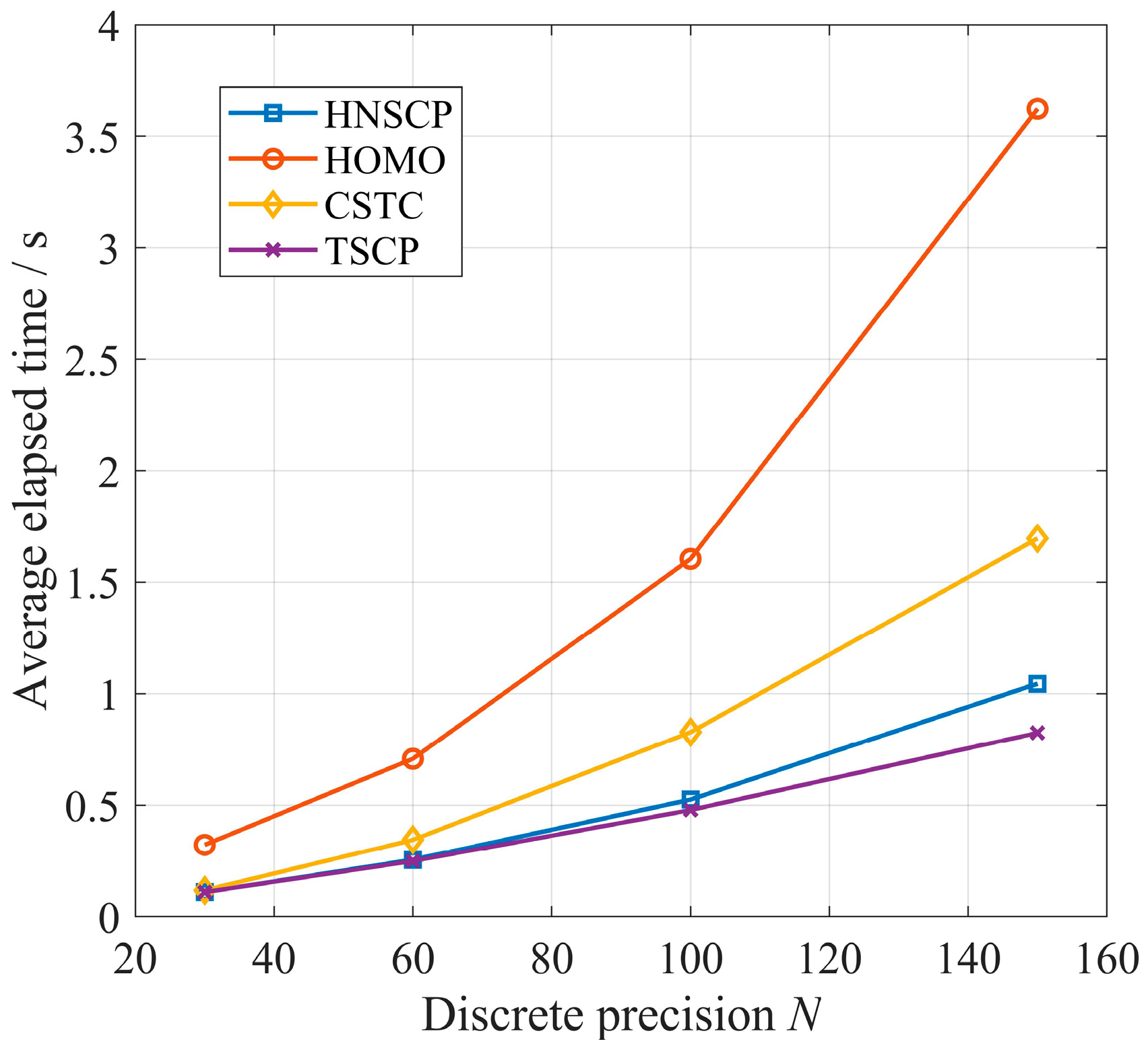
6.1. Example 1: Comparison with State-of-Art Algorithms
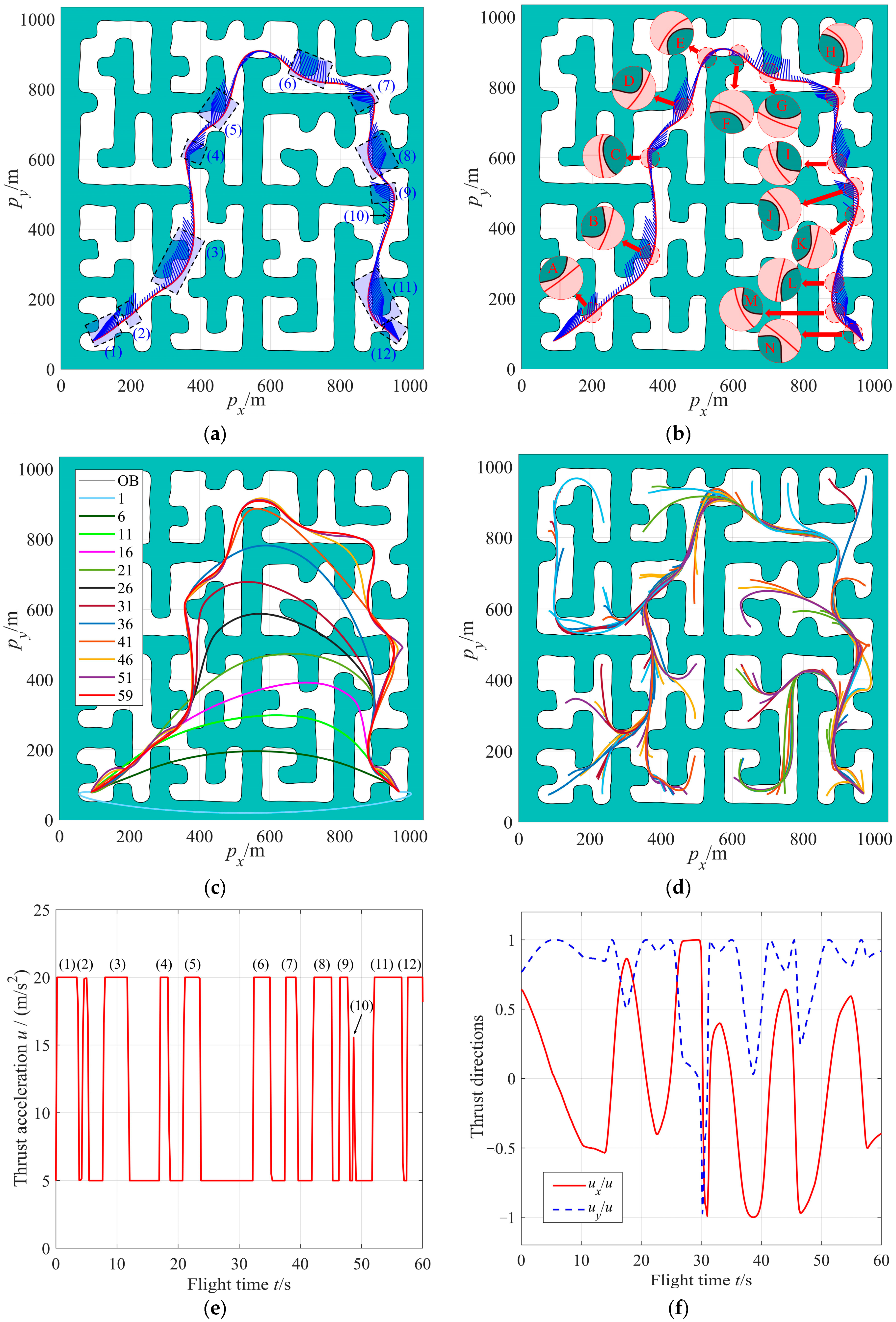
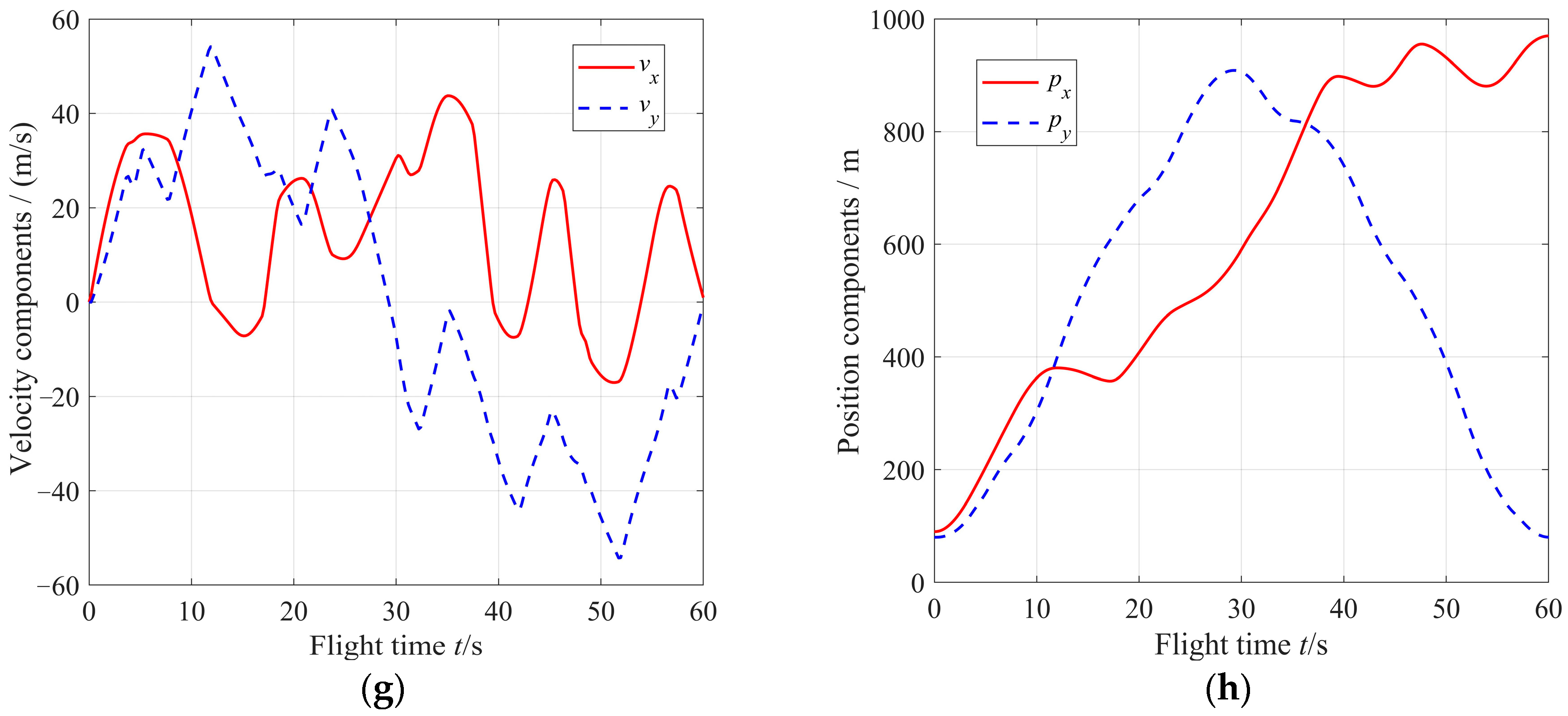
6.2. Example 2: Application in a Complex Maze
- Set and increase the safety margin (adopted in this work);
- Increase the scale of the neural network to improve the fitting accuracy;
- Take the HNSCP result as the initial value, and use the TSCP algorithm to refine the solution.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Song, Z.Y.; Wang, C.; Theil, S.; Seelbinder, D.; Sagliano, M.; Liu, X.F.; Shao, Z.J. Survey of autonomous guidance methods for powered planetary landing. Front. Inf. Technol. Electron. Eng. 2020, 21, 652–674. [Google Scholar] [CrossRef]
- Ploen, S.R.; Acikmese, A.B.; Wolf, A. A comparison of powered descent guidance laws for Mars pinpoint landing. In Proceedings of the Collection of Technical Papers—AIAA/AAS Astrodynamics Specialist Conference 2006, Keystone, CO, USA, 21–24 August 2006; pp. 1724–1739. [Google Scholar]
- Zhou, X.; Wen, X.; Wang, Z.; Gao, Y.; Li, H.; Wang, Q.; Yang, T.; Lu, H.; Cao, Y.; Xu, C.; et al. Swarm of micro flying robots in the wild. Sci. Robot. 2022, 7, eabm5954. [Google Scholar] [CrossRef] [PubMed]
- Malyuta, D.; Reynolds, T.P.; Szmuk, M.; Lew, T.; Bonalli, R.; Pavone, M.; Acikmese, B. Convex Optimization for Trajectory Generation: A Tutorial on Generating Dynamically Feasible Trajectories Reliably and Efficiently. IEEE Control. Syst. 2021, 42, 40–113. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, D.; Li, X.; Kong, C.; Su, M. Convex Optimization for Rendezvous and Proximity Operation via Birkhoff Pseudospectral Method. Aerospace 2022, 9, 505. [Google Scholar] [CrossRef]
- Oumer, A.M.; Kim, D.-K. Real-Time Fuel Optimization and Guidance for Spacecraft Rendezvous and Docking. Aerospace 2022, 9, 276. [Google Scholar] [CrossRef]
- Liu, X.; Lu, P.; Pan, B. Survey of convex optimization for aerospace applications. Astrodynamics 2017, 1, 23–40. [Google Scholar] [CrossRef]
- Liu, X. Autonomous Trajectory Planning by Convex Optimization. Doctoral Dissertation, Iowa State University, Ames, IA, USA, 2013. [Google Scholar]
- Mao, Y.; Szmuk, M.; Acikmese, B. Successive convexification of non-convex optimal control problems and its convergence properties. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control, CDC 2016, Las Vegas, NV, USA, 12–14 December 2016; pp. 3636–3641. [Google Scholar]
- Bonalli, R.; Cauligi, A.; Bylard, A.; Pavone, M. GuSTO: Guaranteed sequential trajectory optimization via sequential convex programming. In Proceedings of the IEEE International Conference on Robotics and Automation 2019, Montreal, QC, Canada, 20–24 May 2019; pp. 6741–6747. [Google Scholar]
- Malyuta, D.; Yu, Y.; Elango, P.; Açıkmeşe, B. Advances in trajectory optimization for space vehicle control. Annu. Rev. Control 2021, 52, 282–315. [Google Scholar] [CrossRef]
- Long, J.; Cui, P.; Zhu, S. Vector Trajectory Method for Obstacle Avoidance Constrained Planetary Landing Trajectory Optimization. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2996–3010. [Google Scholar] [CrossRef]
- Augugliaro, F.; Schoellig, A.P.; D’Andrea, R. Generation of collision-free trajectories for a quadrocopter fleet: A sequential convex programming approach. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems 2012, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1917–1922. [Google Scholar]
- Morgan, D.; Chung, S.J.; Hadaegh, F.Y. Model predictive control of swarms of spacecraft using sequential convex programming. J. Guid. Control Dyn. 2014, 37, 1725–1740. [Google Scholar] [CrossRef] [Green Version]
- Virgili-Llop, J.; Zagaris, C.; Zappulla, R.; Bradstreet, A.; Romano, M. Convex optimization for proximity maneuvering of a spacecraft with a robotic manipulator. In Proceedings of the 27th AAS/AIAA Spaceflight Mechanics Meeting, San Antonio, TX, USA, 6–9 February 2017; Advances in the Astronautical Sciences. pp. 1059–1078. [Google Scholar]
- Zhang, Z.; Li, J.; Wang, J. Sequential convex programming for nonlinear optimal control problems in UAV path planning. Aerosp. Sci. Technol. 2018, 76, 280–290. [Google Scholar] [CrossRef]
- Misra, G.; Bai, X. Iteratively feasible optimal spacecraft guidance with non-convex path constraints using convex optimization. In Proceedings of the AIAA Scitech 2020 Forum 2020, Orlando, FL, USA, 6–10 January 2020; pp. 1–18. [Google Scholar]
- Richards, A.; How, J.; Schouwenaars, T.; Feron, E. Plume avoidance maneuver planning using mixed integer linear programming. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Montreal, QC, Canada, 6–9 August 2001. [Google Scholar]
- Richards, A.; Schouwenaars, T.; How, J.P.; Feron, E. Spacecraft trajectory planning with avoidance constraints using mixed-integer linear programming. J. Guid. Control Dyn. 2002, 25, 755–764. [Google Scholar] [CrossRef] [Green Version]
- Szmuk, M.; Reynolds, T.P.; Açıkmeşe, B. Successive convexification for real-time six-degree-of-freedom powered descent guidance with state-triggered constraints. J. Guid. Control Dyn. 2020, 43, 1399–1413. [Google Scholar] [CrossRef]
- Szmuk, M.; Malyuta, D.; Reynolds, T.P.; McEowen, M.S.; Acikmese, B. Real-Time Quad-Rotor Path Planning Using Convex Optimization and Compound State-Triggered Constraints. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems 2019, Macau, China, 3–8 November 2019; pp. 7666–7673. [Google Scholar]
- Zhao, Z.; Shang, H.; Wei, B. Tackling Nonconvex Collision Avoidance Constraints for Optimal Trajectory Planning Using Saturation Functions. J. Guid. Control Dyn. 2022, 45, 1002–1016. [Google Scholar] [CrossRef]
- Taheri, E.; Junkins, J.L.; Kolmanovsky, I.; Girard, A. A novel approach for optimal trajectory design with multiple operation modes of propulsion system, part 1. Acta Astronaut. 2020, 172, 151–165. [Google Scholar] [CrossRef] [Green Version]
- Taheri, E.; Junkins, J.L.; Kolmanovsky, I.; Girard, A. A novel approach for optimal trajectory design with multiple operation modes of propulsion system, part 2. Acta Astronaut. 2020, 172, 166–179. [Google Scholar] [CrossRef] [Green Version]
- Saranathan, H.; Grant, M.J. Relaxed autonomously switched hybrid system approach to indirect multiphase aerospace trajectory optimization. J. Spacecr. Rocket. 2018, 55, 611–621. [Google Scholar] [CrossRef]
- Malyuta, D.; Acikmese, B. Fast Homotopy for Spacecraft Rendezvous Trajectory Optimization with Discrete Logic. arXiv 2021, arXiv:2107.07001. [Google Scholar]
- Ma, L.; Wang, K.; Xu, Z.; Shao, Z.; Song, Z.; Biegler, L.T. Trajectory optimization for lunar rover performing vertical takeoff vertical landing maneuvers in the presence of terrain. Acta Astronaut. 2018, 146, 289–299. [Google Scholar] [CrossRef]
- Yin, S.; Li, J.; Cheng, L. Low-thrust spacecraft trajectory optimization via a DNN-based method. Adv. Space Res. 2020, 66, 1635–1646. [Google Scholar] [CrossRef]
- Tang, G.; Sun, W.; Hauser, K. Learning Trajectories for Real-Time Optimal Control of Quadrotors. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems 2018, Madrid, Spain, 1–5 October 2018; pp. 3620–3625. [Google Scholar]
- Li, W.; Gong, S. Free Final-Time Fuel-Optimal Powered Landing Guidance Algorithm Combing Lossless Convex Optimization with Deep Neural Network Predictor. Appl. Sci. 2022, 12, 3383. [Google Scholar] [CrossRef]
- Banerjee, S.; Lew, T.; Bonalli, R.; Alfaadhel, A.; Alomar, I.A.; Shageer, H.M.; Pavone, M. Learning-based Warm-Starting for Fast Sequential Convex Programming and Trajectory Optimization. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 7–14 March 2020. [Google Scholar]
- Shi, J.; Wang, J.; Su, L.; Ma, Z.; Chen, H. A Neural Network Warm-Started Indirect Trajectory Optimization Method. Aerospace 2022, 9, 435. [Google Scholar] [CrossRef]
- Jiang, B.; Li, B.; Zhou, W.; Lo, L.-Y.; Chen, C.-K.; Wen, C.-Y. Neural Network Based Model Predictive Control for a Quadrotor UAV. Aerospace 2022, 9, 460. [Google Scholar] [CrossRef]
- Kalakrishnan, M.; Chitta, S.; Theodorou, E.; Pastor, P.; Schaal, S. STOMP: Stochastic trajectory optimization for motion planning. In Proceedings of the IEEE International Conference on Robotics and Automation 2011, Shanghai, China, 9–13 May 2011; pp. 4569–4574. [Google Scholar]
- Ratliff, N.; Zucker, M.; Bagnell, J.A.; Srinivasa, S. CHOMP: Gradient optimization techniques for efficient motion planning. In Proceedings of the IEEE International Conference on Robotics and Automation 2009, Kobe, Japan, 12–17 May 2009; pp. 489–494. [Google Scholar]
- Açikmeşe, B.; Ploen, S.R. Convex programming approach to powered descent guidance for mars landing. J. Guid. Control. Dyn. 2007, 30, 1353–1366. [Google Scholar] [CrossRef]
- Mokrý, P. Iterative method for solving the eikonal equation. In Proceedings of the SPIE—The International Society for Optical Engineering, Liberec, Czech Republic, 11 November 2016. [Google Scholar]
- Atilgan, T.K.; Tuǧrul, T.H.; Haluk, A.M. Three-dimensional internal ballistic analysis by fast marching method applied to propellant grain burn-back. In Proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Tucson, Arizona, 10–13 July 2005. [Google Scholar]
- Li, W.; Li, W.; He, Y.; Liang, G. Reverse Design of Solid Propellant Grain for a Performance-Matching Goal: Shape Optimization via Evolutionary Neural Network. Aerospace 2022, 9, 552. [Google Scholar] [CrossRef]
- Crane, K.; Weischedel, C.; Wardetzky, M. Geodesics in heat: A new approach to computing distance based on heat flow. ACM Trans. Graphics. 2013, 32, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Sethian, J.A. Curvature and the evolution of fronts. Commun. Math. Phys. 1985, 101, 487–499. [Google Scholar] [CrossRef]
- Sethian, J.A. Level Set Methods and Fast Marching Methods: Evolving Interfaces in Computational Geometry, Fluid Mechanics, Computer Vision, and Materials Science; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Cybenko, G. Approximation by superpositions of a sigmoidal function. Math. Control Signals Syst. 1989, 2, 303–314. [Google Scholar] [CrossRef]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- Foresee, F.D.; Hagan, M.T. Gauss-Newton approximation to bayesian learning. In Proceedings of the IEEE International Conference on Neural Networks—Conference Proceedings 1997, Houston, TX, USA, 12 June 1997; pp. 1930–1935. [Google Scholar]
- Domahidi, A.; Chu, E.; Boyd, S. ECOS: An SOCP solver for embedded systems. In Proceedings of the 2013 European Control Conference, ECC 2013, Zurich, Switzerland, 17–19 July 2013; pp. 3071–3076. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Item | Number | Dimension of the Cone | Total Number |
|---|---|---|---|---|
| Variables to be optimized | Time step | 1 | - | 15 N + 2 |
| Position | 3 N | |||
| Velocity | 3 N | |||
| Control | 3 N | |||
| Virtual control | 3 N | |||
| Control trust regions | N | |||
| Virtual control magnitude relaxation variables | N | |||
| Time trust region | 1 | |||
| Control magnitude relaxation variables | N | |||
| Affine equality constraints | Boundary value conditions, Equation (4) | 12 | - | 6 N + 6 |
| Dynamic constraints, Equation (10) | 6 (N − 1) | |||
| Affine inequality constraints | OACs, Equation (16) | N | - | 3 N |
| Control magnitude constraints, Equation (18) | 2 N | |||
| Second order cone constraints | Control trust region constraints, Equation (11) | N | 4 | 3 N + 1 |
| Time trust region constraint, Equation (12) | 1 | 2 | ||
| Virtual control constraints, Equation (13) | N | 4 | ||
| Control magnitude constraints, Equation (17) | N | 4 |
| Notation | Explanation |
|---|---|
| Number of units in layer l | |
| Activation function of the units in layer l | |
| Weight matrix from layer l − 1 to layer l | |
| Bias vector from layer l − 1 to layer l | |
| Net input (net activation) of units in layer l | |
| Output (activation) of units in layer l |
| Parameter | Example 1 | Example 2 |
|---|---|---|
| 4 | 4 | |
| 10 | 40 | |
| 20 | 40 | |
| 10 | 40 | |
| 1 | 1 |
| Parameter | Example 1 | Example 2 |
|---|---|---|
| Number of samples n | 54,270 | 77,920 |
| Mean square error (MSE) | ||
| MSE of the training set | ||
| MSE of the test set | ||
| Training time | 30 min 14 s | 3 h 21 min 10 s |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| m | 100,000.0 | ||
| m/s | 0.1 | ||
| m | 0.1 | ||
| m/s | 0.2 | ||
| 20 m/s2 | 30 m/s | ||
| 5 m/s2 | 5 m |
| Algorithm | Velocity Increment (m/s) | Number of SCP Iterations | Elapsed Time (s) | Terminal Time (s) |
|---|---|---|---|---|
| HNSCP | 490.80 (Best) | 19 (Best) | 0.487 (Best) | 44.93 |
| HOMO | 509.07 | 19 (Best) | 1.710 | 47.80 |
| CSTC | 609.48 | 29 | 0.920 | 56.35 |
| TSCP | - | Infeasible after 6 | - | - |
| Algorithm | N | Convergence Rate | Average Elapsed Time (s) | Solver’s Average Consumed Time (s) | Optimality Performance | Can it be Extended to Exp. 2 |
|---|---|---|---|---|---|---|
| HNSCP | 30 | 100% | 0.1087 | 0.0950 | 1.0 | Easy |
| 60 | 100% | 0.2546 | 0.2129 | 1.0 | ||
| 100 | 100% | 0.5249 | 0.4124 | 1.0 | ||
| 150 | 100% | 1.0450 | 0.7658 | 1.0 | ||
| HOMO (Poor real-time performance) | 30 | 96% | 0.3218 | 0.2782 | 0.9912 | Hard |
| 60 | 98% | 0.7077 | 0.5451 | 1.0001 | ||
| 100 | 100% | 1.6043 | 1.1096 | 1.0058 | ||
| 150 | 100% | 3.6225 | 2.0957 | 1.0153 | ||
| CSTC (Poor optimality performance) | 30 | 99% | 0.1175 | 0.1050 | 1.1052 | Hard |
| 60 | 99% | 0.3441 | 0.2980 | 1.1559 | ||
| 100 | 100% | 0.8270 | 0.6561 | 1.2239 | ||
| 150 | 98% | 1.6957 | 1.2685 | 1.2217 | ||
| TSCP (Poor convergence performance) | 30 | 22% | 0.1093 | 0.0968 | 1.0234 | Easy |
| 60 | 18% | 0.2488 | 0.2117 | 1.0001 | ||
| 100 | 18% | 0.4781 | 0.3856 | 1.0001 | ||
| 150 | 18% | 0.8242 | 0.6172 | 1.0000 |
| Single Test | Velocity increment (m/s) | Number of Iterations | Elapsed Time (s) | Terminal Time (s) |
| Results | 751.21 | 59 | 1.728 | 60.179 |
| Monte Carlo Test | Sample Quantity | Convergence Rate | Average Elapsed Time (s) | Solver’s Average Consumed Time (s) |
| Results | 100 | 100% | 1.945 | 1.487 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Li, W.; Cheng, L.; Gong, S. Trajectory Optimization with Complex Obstacle Avoidance Constraints via Homotopy Network Sequential Convex Programming. Aerospace 2022, 9, 720. https://doi.org/10.3390/aerospace9110720
Li W, Li W, Cheng L, Gong S. Trajectory Optimization with Complex Obstacle Avoidance Constraints via Homotopy Network Sequential Convex Programming. Aerospace. 2022; 9(11):720. https://doi.org/10.3390/aerospace9110720
Chicago/Turabian StyleLi, Wenbo, Wentao Li, Lin Cheng, and Shengping Gong. 2022. "Trajectory Optimization with Complex Obstacle Avoidance Constraints via Homotopy Network Sequential Convex Programming" Aerospace 9, no. 11: 720. https://doi.org/10.3390/aerospace9110720