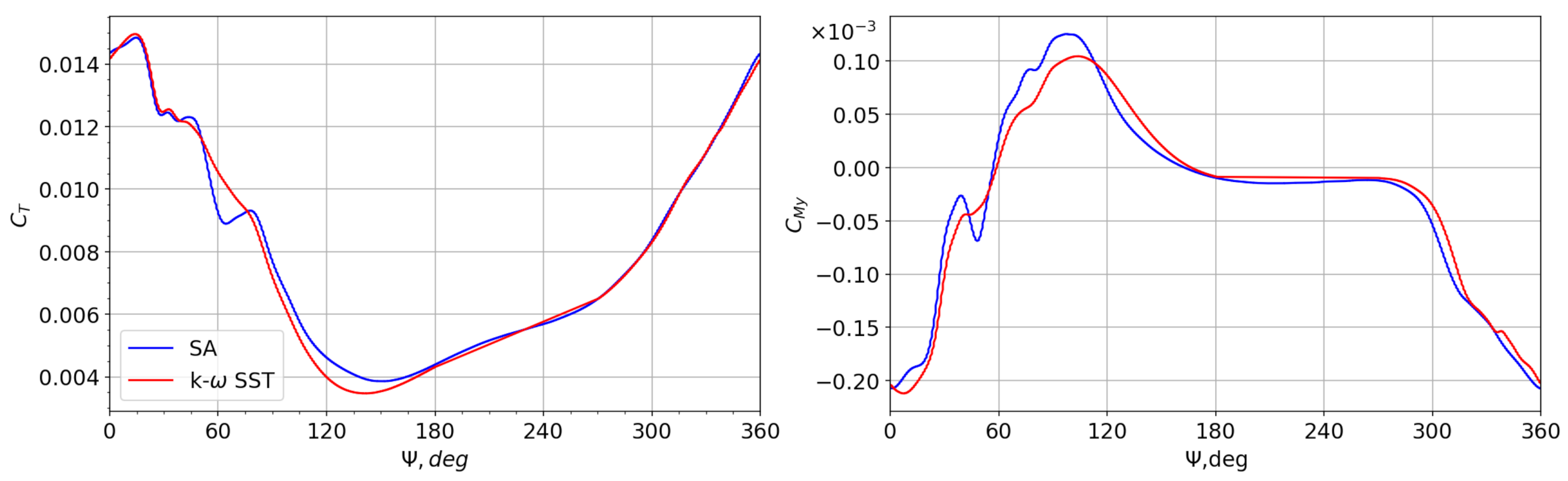
3.2. Force and Moment
There is a marginal difference in both thrust and pitching moment coefficients in terms of the maximum values as shown in
Figure 4. The stall event occurs later for the
SST turbulence model, and the pitching-up moment in the post-stall phase is relatively smaller. This indicates differences of the detailed fluid structure in the stall regime; this will be studied in detail in the future but not within the scope of current study. Nevertheless, the overall trends of the curves are similar to each other, and we are using the numerical results of the SA turbulent model to illustrate the dynamic stall events on the rotating-pitching blade.
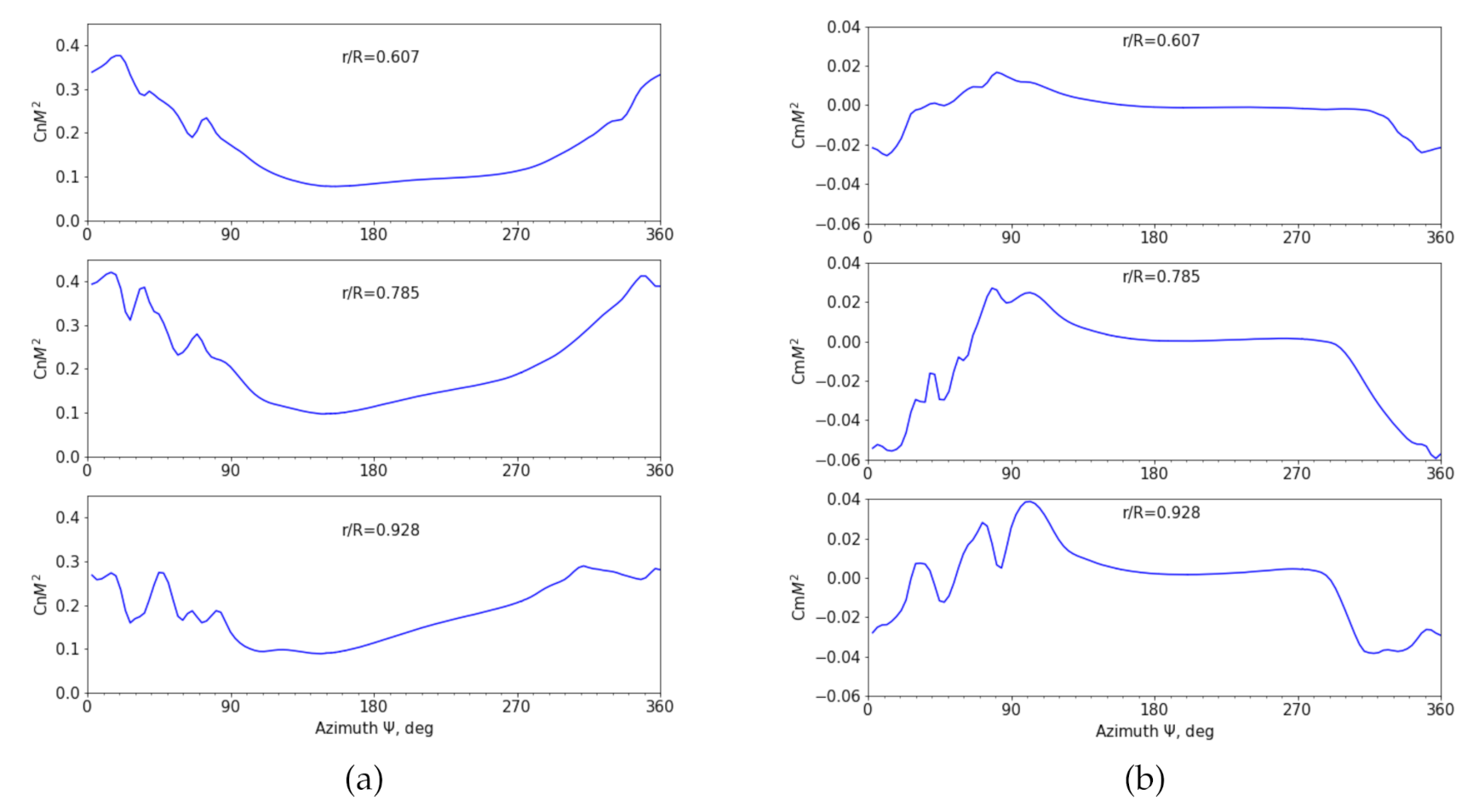
Sectional force coefficients are shown in
Figure 5 at radial locations
= 0.607, 0.785 and 0.928. The plot shows an apparent difference between radial locations in both stall onset time and stalled value. Both
and
show an earlier stall for outboard locations. However, the extreme
and stalled value of
don’t take place at the outermost location. Both thrust and pitching moment curves in the post-stall phase oscillate distinguishably compared to their inboard counterparts.
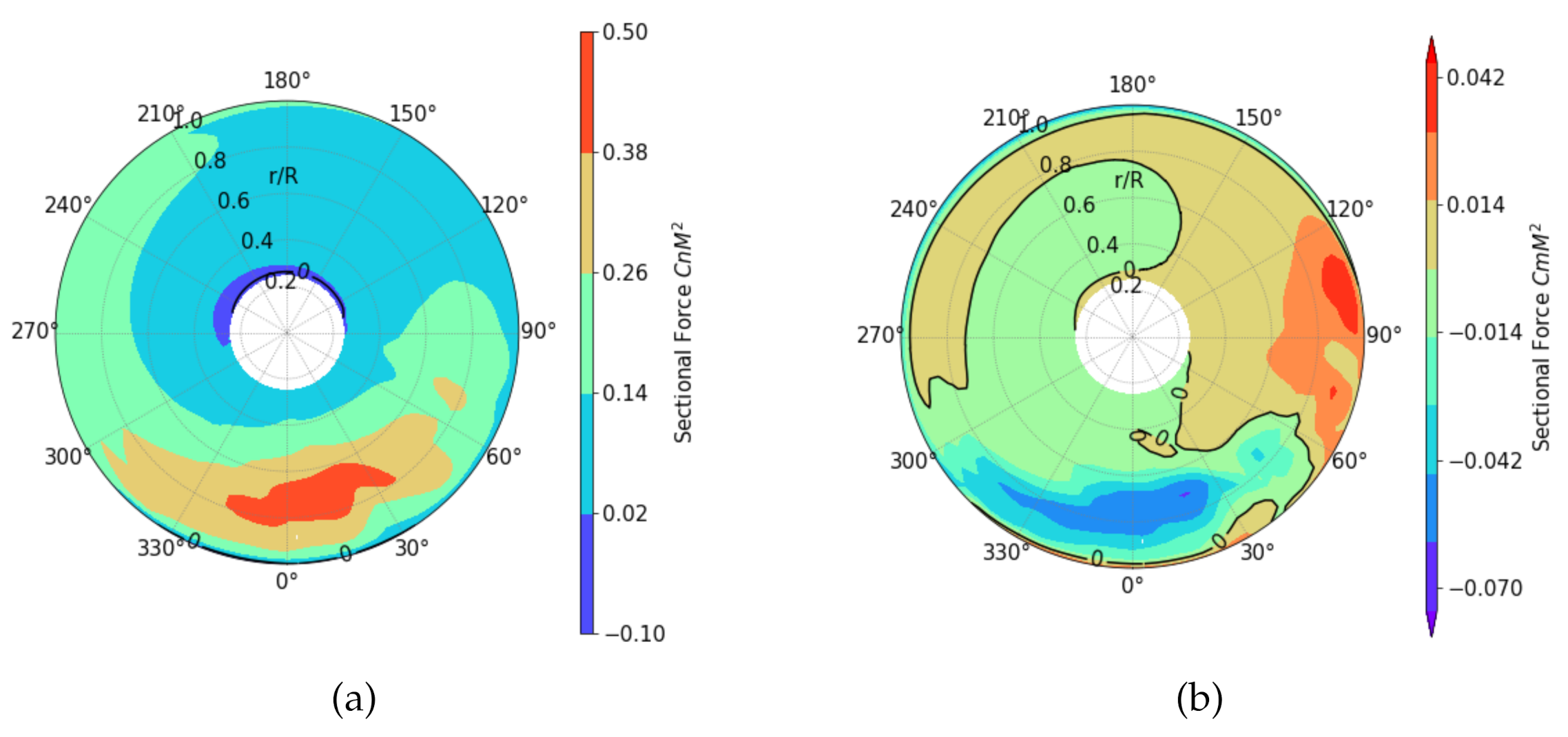
Figure 6 is the rotor map of both sectional normal force and moment coefficients. Force coefficients are non-dimensionalized by sound speed. The maximum
appears in the region 0.6 <
< 0.85,
, which is in the pitching-down phase. While the relative high value (orange area) begins at
,
(pitching up) and remains until
,
(pitching down). The negative normal force also exists near blade tip at azimuth angle
, which is a result of the tip vortex; it appears at the blade root as well, which is the attributed reverse flow region and the strong root whirl flow, the latter a pure result of the abrupt cut of the blade model at the root. The minimum
(pitch down moment) appears at
= 0.72,
, which is in the pitching-down phase well beyond the maximum pitch angle. The relatively small value (blue region) starts from
and ends near
, which is consistent with the change of normal force, and this indicates that the dynamic stall occurs in this region. The maximum
(pitching-up moment) appears at blade tip,
, where a normal shock exists on the suction surface, see
Figure 7 .
is contoured with a bold line in the rotor map. The rugged line shows the recovery of
occurs inboard first while very late at radial locations 0.6 <
< 1.
3.3. Vortex Structure
Since dynamic stall events are closely associated with the vortex generating and shedding on the upper surface of a blade, we show the vortex structures on the rotating blade at different azimuth angles in
Figure 8. The location of vortex cores over the blade is plotted in
Figure 9, which is extracted based on the eigenmodes of the velocity vectors [
27]. This will be compared with previous research to illustrate the difference in rotating environment.
An
-shaped vortex structure is visible in the snapshots (b)
(c)
, which is similar to the observations for a pitching finite wing by [
14], and also similar to what [
15] called the
-type arch vortex. A similar observation is also reported by [
20]. Unlike on a pitching finite wing, as soon as the
-shape vortex is shed, the leading edge vortex (LEV) comes into interaction with the blade tip vortex to a great extend, and even an inclined arch vortex appears at the tip, see (e)
.
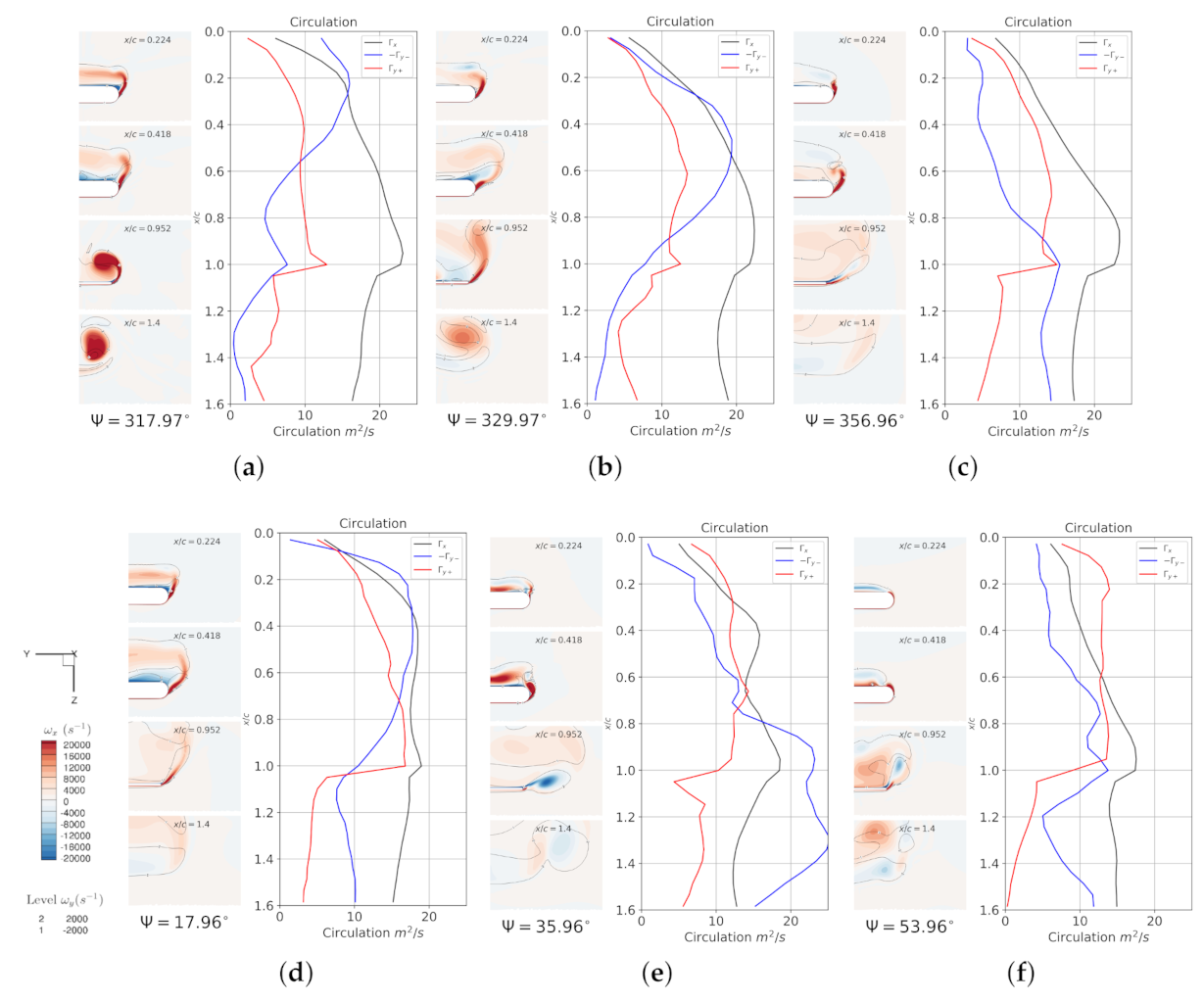
In order to see the interaction of the leading-edge vortex and the tip vortex, we take slices at several chord-wise locations near the tip region (0.94 <
< 1.125), and integrate
,
in this region where
, which is the main contribution to the tip vortex in cases that are free from strong interaction. The circulation in the
y-direction indicates the mixture of LEV in the tip vortex region. This result is plotted in
Figure 10 with selected azimuth angles.
The consequent strong interaction of the LEV and tip vortex dominates the flow behavior of the post-stall phase. There are mainly four stages in this phase, symbolized by the shedding of LEV at the tip area. The 1st stage begins at , when the LEV accumulates at the blade-tip’s leading-edge, which is shown as the increasing integration of negative y circulation ; the LEV starts shedding at as the peak of moves rearward, and at the place where this peak locates, the circulation in the x-direction in the tip region is also relatively larger. As the separated DSV moves downstream and outboard, the tip vortex at is elevated and distorted. Alongside the rearward movement of , grows in the vicinity of the tip surface. This explains why the negative exists at the tip region on the rotor map of . The second stage begins at when the previous main DSV is transported off of the trailing edge; another LEV is accumulated at the leading edge. In this stage, the tip vortex at is no longer obvious, but the net circulation in the x-direction increases. This means, in the tip region that there exists a more diffused vorticity field rather than the conventional concentrated structure. As the LEV grows over the chord, the tip vortex is not apparent; nevertheless, it increases continuously in this area. From this time on, the LEV sheds and entrains the tip vortex, forming a large separation region over the tip area. Finally, marks the end of previous shedding of LEV and the beginning of the next shedding of LEV at the tip area. A reversely rotating tip vortex is generated beneath the mixture layer of the separated leading-edge vortex and tip vortex at . In the near wake, the tip vortex locates more outboard compared to the 1st stage, and a pair of counter rotating vortices is obvious. At azimuth , the interaction of LEV and tip vortex begins to disentangle at . Another growing and shedding of LEV at the tip area is observed, but in this stage there is no strong interaction with the tip vortex. It enters the recovery stage.
The interaction of the leading edge vortex with the tip vortex represents three important features:
The leading-edge vortex is not “pinned” by the tip vortex, which is contrary to the observations for a pitching wing;
There is a strong correlation of circulation in the x-direction and the chord-wise location of DSV. This can be explained as a result of lower pressure created by the DSV, which induced higher velocity around the tip.
The concentrated tip vortex is entrained into LEV during the pitching-down phase, and a pair of counter-rotating vortices is observed in the near wake of the blade.
Ref. [
28] measured the tip wake in the near field of an oscillating wing; he discovered the hysteresis behaviour of the tip vortex, and a more diffused tip vortex during a down-stroke compared with the up-stroke. Current numerical simulation complies with the observation of pitching wing.
Another significant feature shown in
Figure 8 is the conical structured LEV on the rotating blade, which is very similar to the research on a rotating wing by [
29]. This conical shaped structure is treated as a more stable LEV, “pinned” at the leading edge [
30], if we look at slices taken along the chord-wise direction. Ref. [
30] explains that the stability of LEV on rotating wing is due to the span-wise flow, which transports vorticity to the tip and inhibits the growth of LEV, hence the critical circulation beyond which the LEV will detach from the leading edge is not reached. In addition, this can explain the phenomenon observed by [
17], who concluded that vortex evolution varies with radial positions on the blade, namely, at some locations, LEV sheds into dynamic stall vortex (DSV), while, in other places, only a secondary vortex is generated. When the phenomenon inspected from a three-dimensional perspective, this conclusion is just an incomplete description of the
-shaped vortex outboard and the conical vortex structure inboard. That is to say, the detached DSV is rather a part of the arch vortex, which attaches to the blade surface with two “legs”; and this is due to the stability of the conical LEV structure in which no DSV is shed and observed inboard.
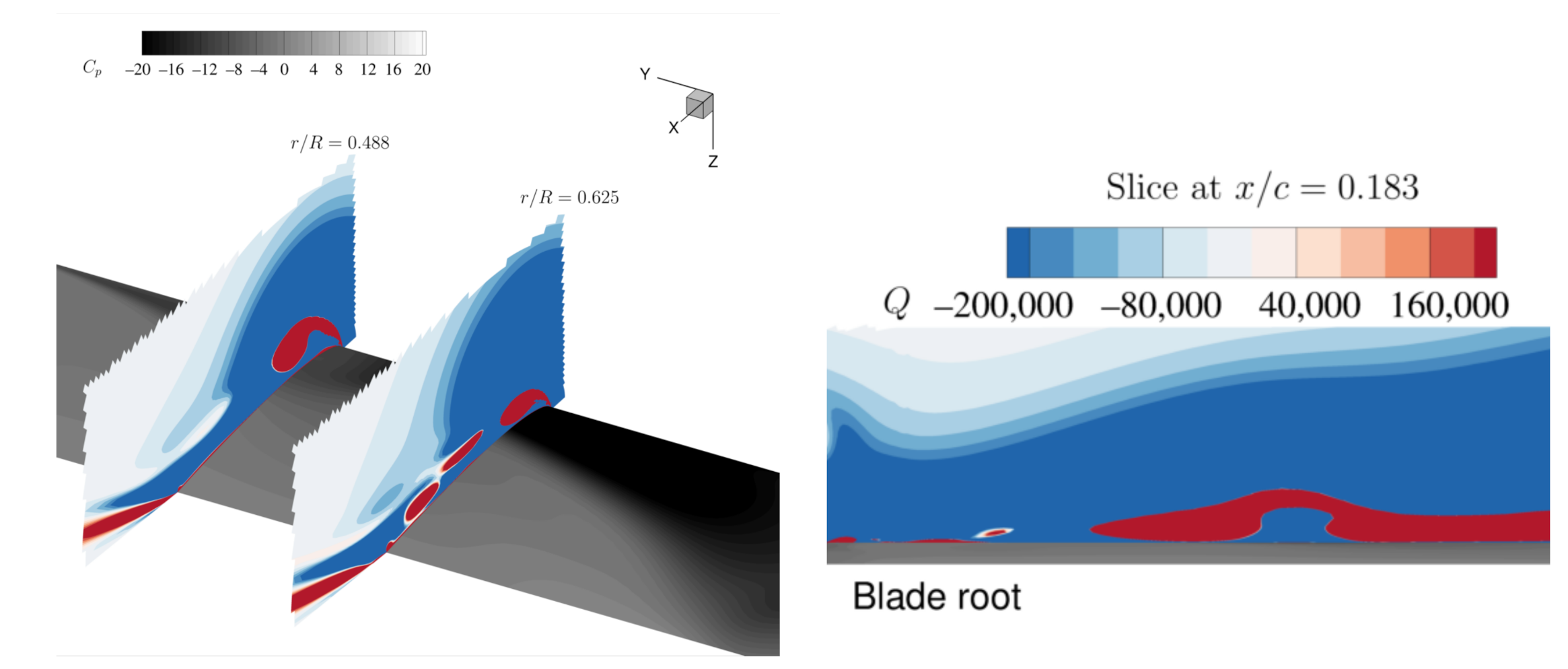
The special phenomenon of the rotating and pitching blade is the vortex generated inboard which can be seen in
Figure 8b–f (
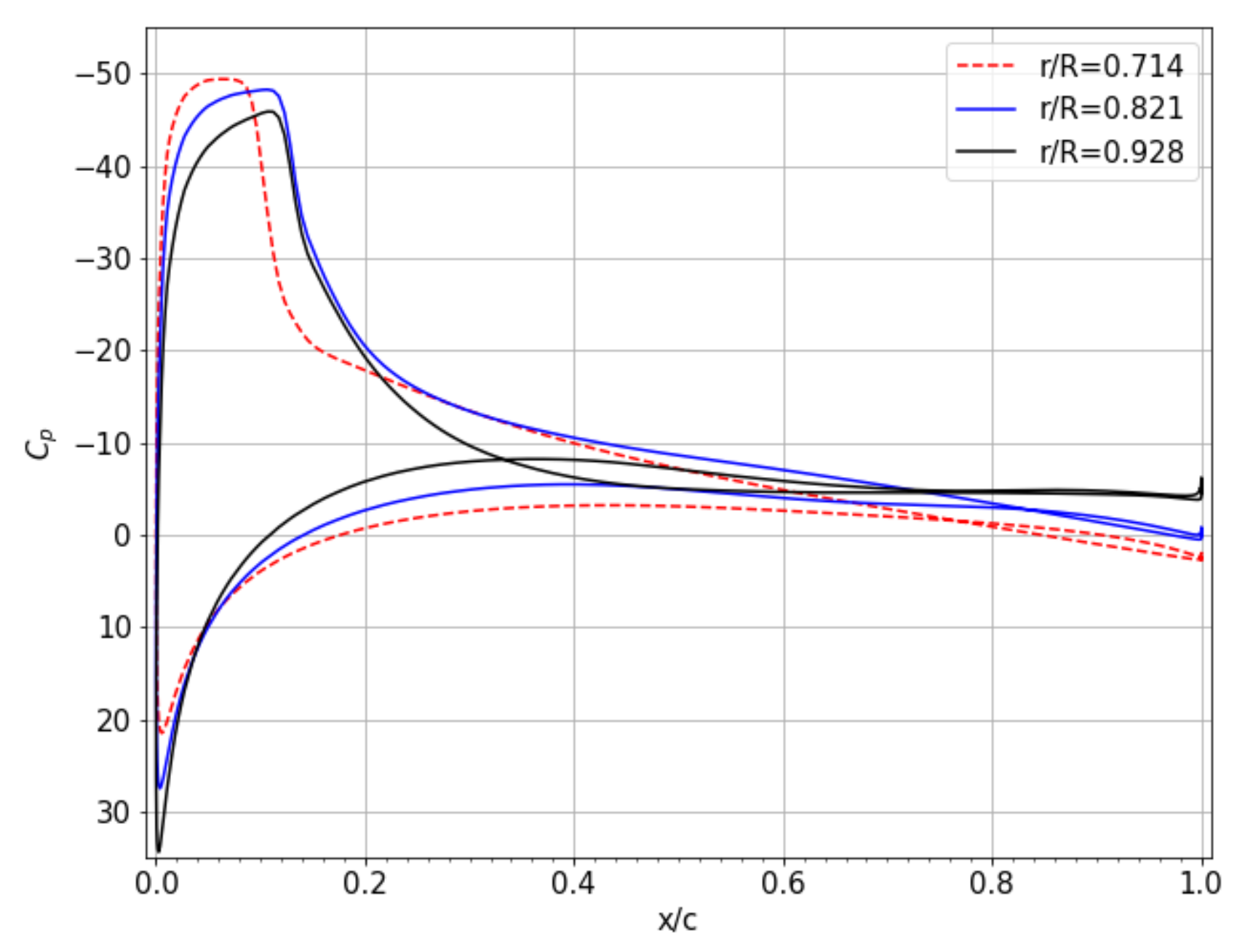
) as a swelling part within the conical LEV region inboard the blade, and it appears on different radial locations and grows in size while moving outboard. This swell structure creates a relative higher pressure on the blade, as is shown in
Figure 11 where a shallow grey area at
= 0.4875 is encompassed by a darker area. This is a result of the alleviated LEV, when compared with the one at
= 0.625, where the LEV stays close to the upper surface of the blade. From the
x plane slice, one can easily identify the detachment of the vortex structure. This structure corresponds to what [
17] have observed on their retreating blade that inboard LEV didn’t generate a DSV but a secondary vortex. As the swell structure moves outboard, it carries the vorticity that arched away from the surface and hence at that radial location no shedding of the LEV occurs. The span-wise flow also contributes to the outboard moving of the swell structure.
This swell structure seems to be a result of the Coriolis force on the rotating blade at first thought, but we carefully examined the pressure force and the Coriolis force of the conical LEV slices at several spanwise locations and found out that the Coriolis force is too small to affect the vortex structure. The swell structure shown in
Figure 8 exists at
near the root corner, prior to the formation of the
-type vortex. Indeed, the structure appears even earlier in this simulation at
, but it doesn’t have any obvious effect on the pressure distribution on the blade’s surface. The growth, however, does have an impact on the pressure distribution later on as shown in
Figure 11. The reason why this structure appears first inboard is still unclear. However, it cannot be explained by a relative stronger Coriolis force towards blade root at low Reynolds number: a greater magnitude inertial Coriolis force that pulls the LEV core away from the leading edge exists when the a rotating wing is positioned closer to the rotation axis [
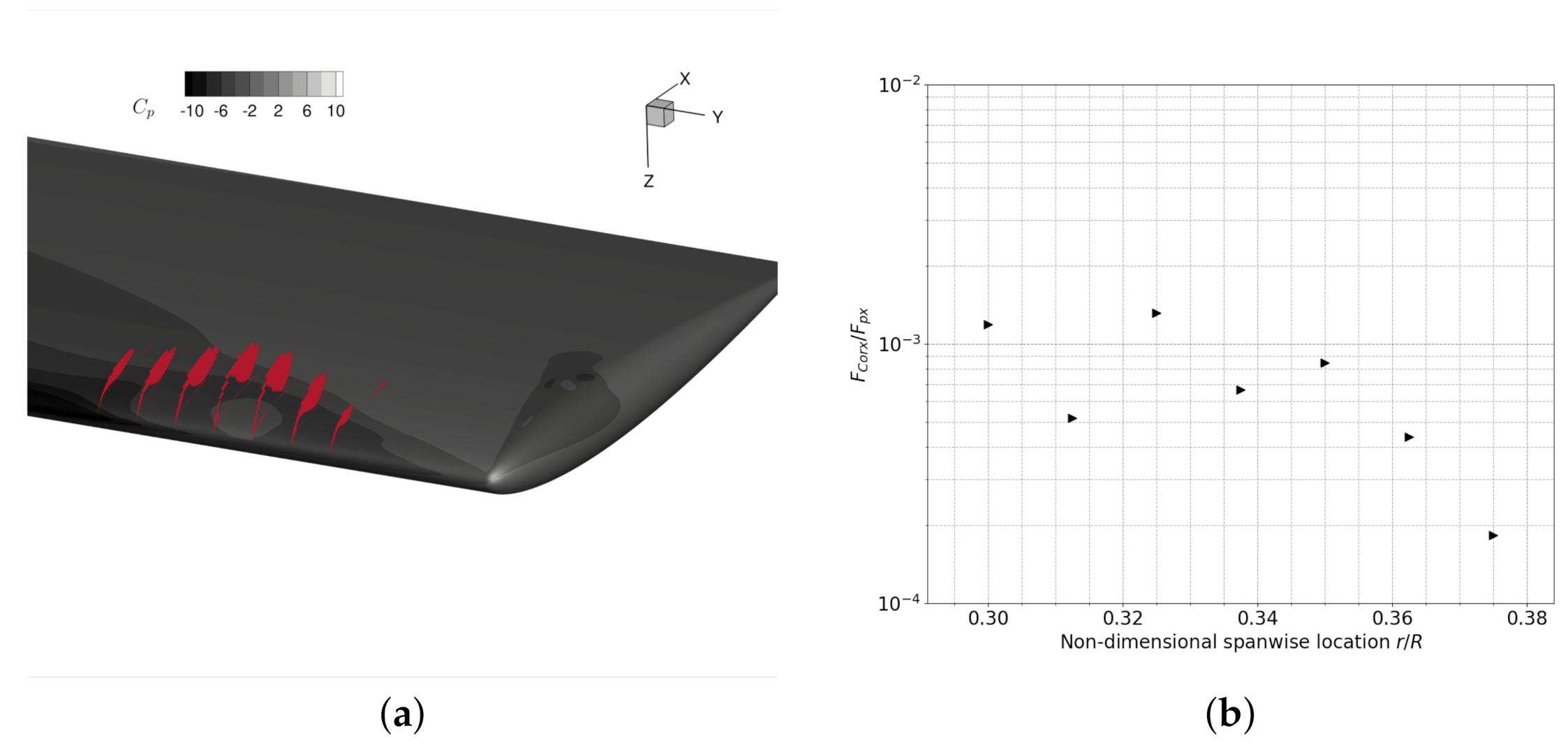
19]. We evaluated forces in the
x-direction on the slices of the vortex structure, as shown in
Figure 12a. Following the divergence theorem, we evaluated the pressure force on the slices of the vortex core:
The Coriolis force exerted on the vortex core can be evaluated as
. The ratio of the Coriolis force to the pressure force is plotted in
Figure 12b. At blade root, this value is as small as
, and it decreases further as the non-dimensional spanwise location
increases. Although
increases with
, this linear increase is not comparable to the quadratical increase of the pressure force, resulting in a continuously decreasing ratio as
increases. It seems that, at such a high Reynolds number, the Coriolis force has little effect on the vortex core structure. Possible explanations for the emergence of the swell structure can be the effect of the jet-like radial flow itself or the upward flow at the blade root. Further research with a rotor hub or a winglet at root can help to clarify the mechanism of the vortex structure’s onset.
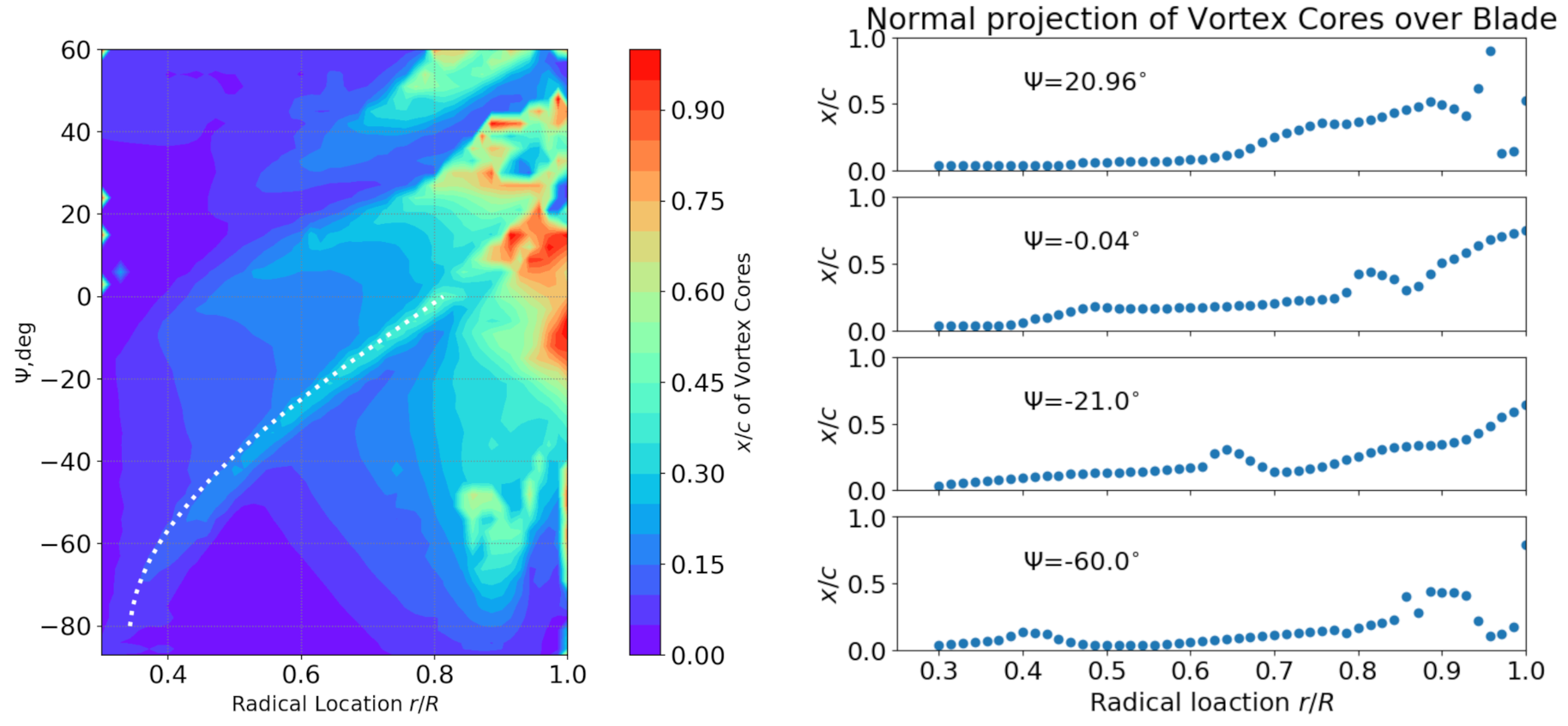
Since the position of the swell structure influences the sectional pitching moment, we thereby extracted the vortex cores and plot its
x position against azimuth angle
in
Figure 9. The lighter color represents an aft position of the vortex core, which results in a negative pitching moment component. In
Figure 5 at a radial location
,
, there is a small kink on both CnM2 and CmM2 curves; In
Figure 9, we see that, at
(or
), the vortex core at
is located well beyond the line of the nearby LEV cores. The lighter color formed an edge in the contour map that represents the trajectory of the swell structure as it moves afterward as well as outward. We define this ridge as the position of the swell structure
when (1)
, (2)
, in radial locations (3)
, where
is the scatter plot of the normal projection of the vortex cores on the blade in
Figure 9. This value
can be estimated as a quasi-uniform-acceleration movement on the blade:
The first term is the centrifugal effect, the second term is the contribution of the yawing effect, with
representing a lower flow speed in vicinity of the blade’s upper surface, and the third term is the initial position of this vortex structure on the blade. In our case, the white dotted line in
Figure 9 gives an approximation of the trajectory using the expression mentioned above for the movement, and
.
3.4. Separation Points
The feature of dynamic stall is mainly the separation of the boundary layer, both at the trailing edge and the leading edge. Understanding, as well as modelling of dynamic stall need these separation points on the blade. Many methods, both Eulerian and Lagrangian, can be used to detect the flow separation in the unsteady flow. We present here pure Eulerian methods, the skin friction and shape factor criteria. The former theorem requiring wall shear stress is based on steady, laminar flows, but was recently extended by [
31] to unsteady, turbulent and compressible flows; and the latter theorem requiring the near wall flow field is based on the boundary theory, and the separation criteria is proposed by [
32] as
for two-dimensional turbulent flows. We follow the rigorous skin friction criteria to extract the instantaneous separation points on the blade and then present the shape factor criteria resultant separation points to show how good the velocity field can be used to evaluate the separation points.
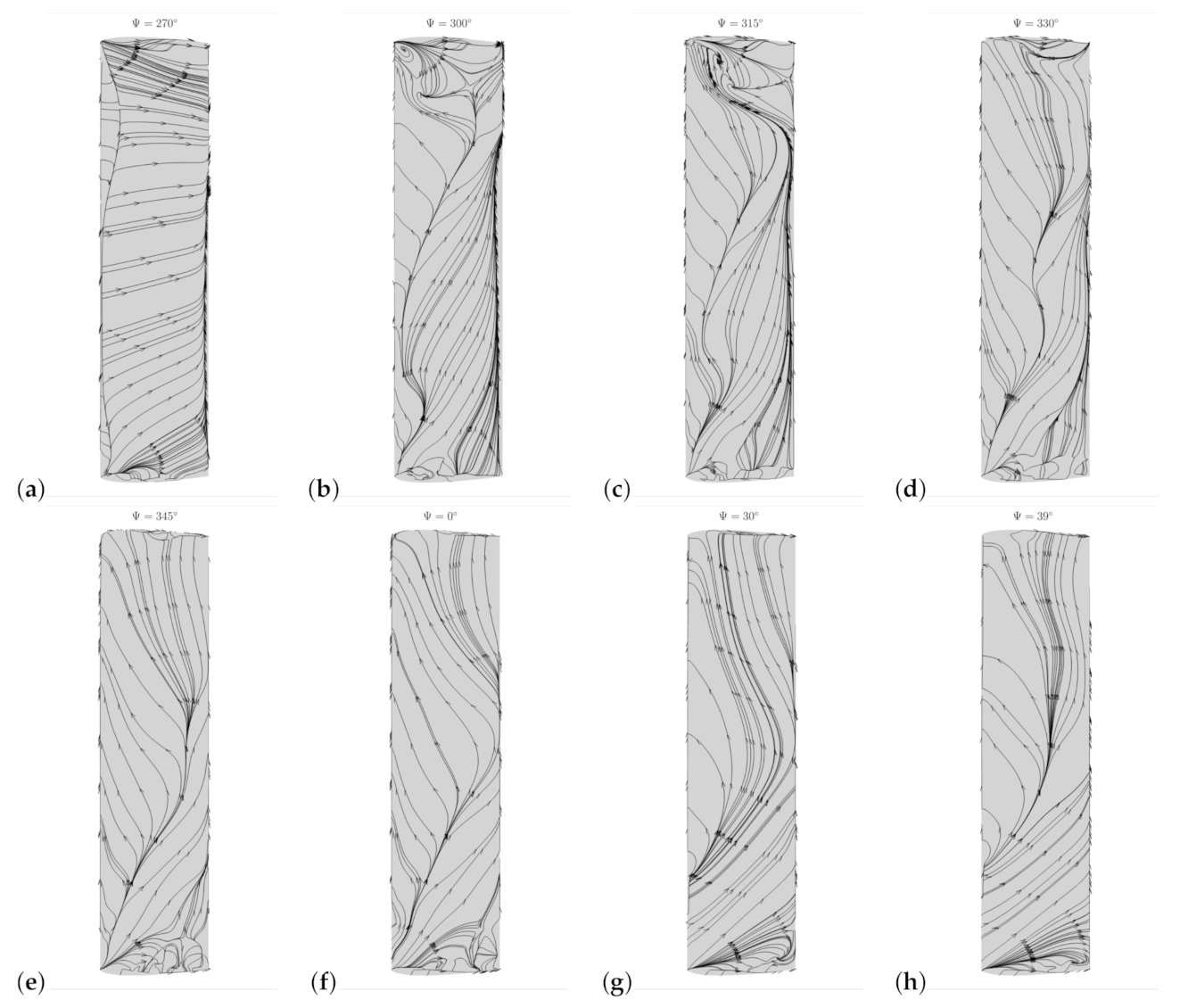
The skin friction lines are plotted in
Figure 13 at selected azimuth angles. According to [
33], the existence of a skin-friction line on a three-dimensional surface on which other lines converge is a necessary condition for the flow separation; and skin-friction line emerging from a saddle point indicates a global separation; otherwise, it is only a local separation. We don’t distinguish here global or local separation, since we know that the leading-edge vortex that attached to the blade can also contribute to such a local separation, which is our interest as well. For the a blade section at a radial position, the aforementioned criteria can be expressed mathematically:
Similarly, if
and
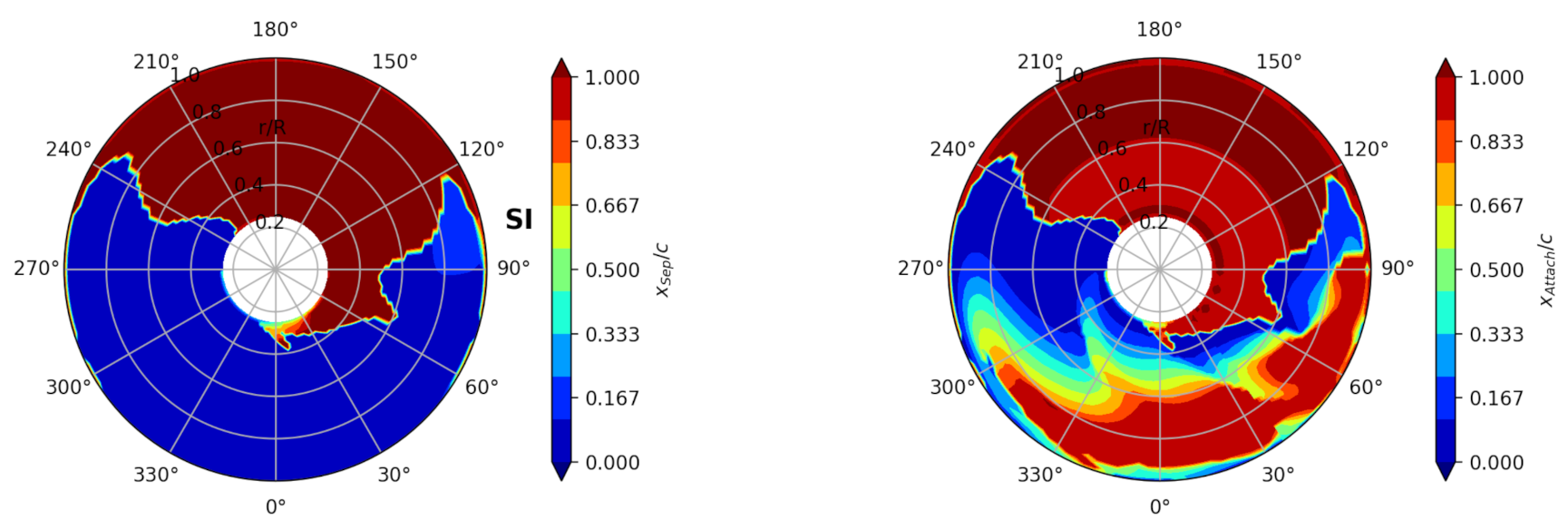
, this is the point of attachment. We extract the sectional separation points and attachment points for the blade in a rotor map in
Figure 14. Note that the stagnation point is also an attachment point, hence we have excluded this point in our algorithm. The leading-edge separation of boundary layer starts outboard and inboard both at
, while, at mid-span
, this starts at
. Together with the attachment points, we see that, between azimuth angle
and
, the flow re-attaches immediately beyond the separation points, which indicates the existence of attached leading edge vortex. When the blade enters the 3rd quadrant, the attachment points begin to move downstream, but the starting azimuth is highly dependent on the radial location. For example, at
, the vortex begins to grow leeward very early while, at
, the vortex remains at the leading edge for a long time. Note that the growth of LEV starts at both ends of the blade and propagates toward mid-span. A helicopter blade may not show the same character, for example simulation by [
21], shows a rather inboard to outboard propagation of the growth of LEV, in which 7A rotor has a linear twist −8.3deg/R meaning larger pitch angle inboard. In our case, the pitch angle is the same for different radial stations, and we observed a double directional propagation of the growth of LEV. Ref. [
24] mentioned that, in the vicinity of wing tip, the flow is attached due to tip vortex induced flow as the wing pitches. In our case, this holds for the azimuth angles before
. We have already seen in
Figure 10 that there exists a strong correlation of tip vortex strength
and the leading edge vortex strength
, and it is indeed this interaction of LEV with tip vortex makes the LEV no longer staying attached at tip. At
, we see a light-coloured region out board, where the separation occurs between
and
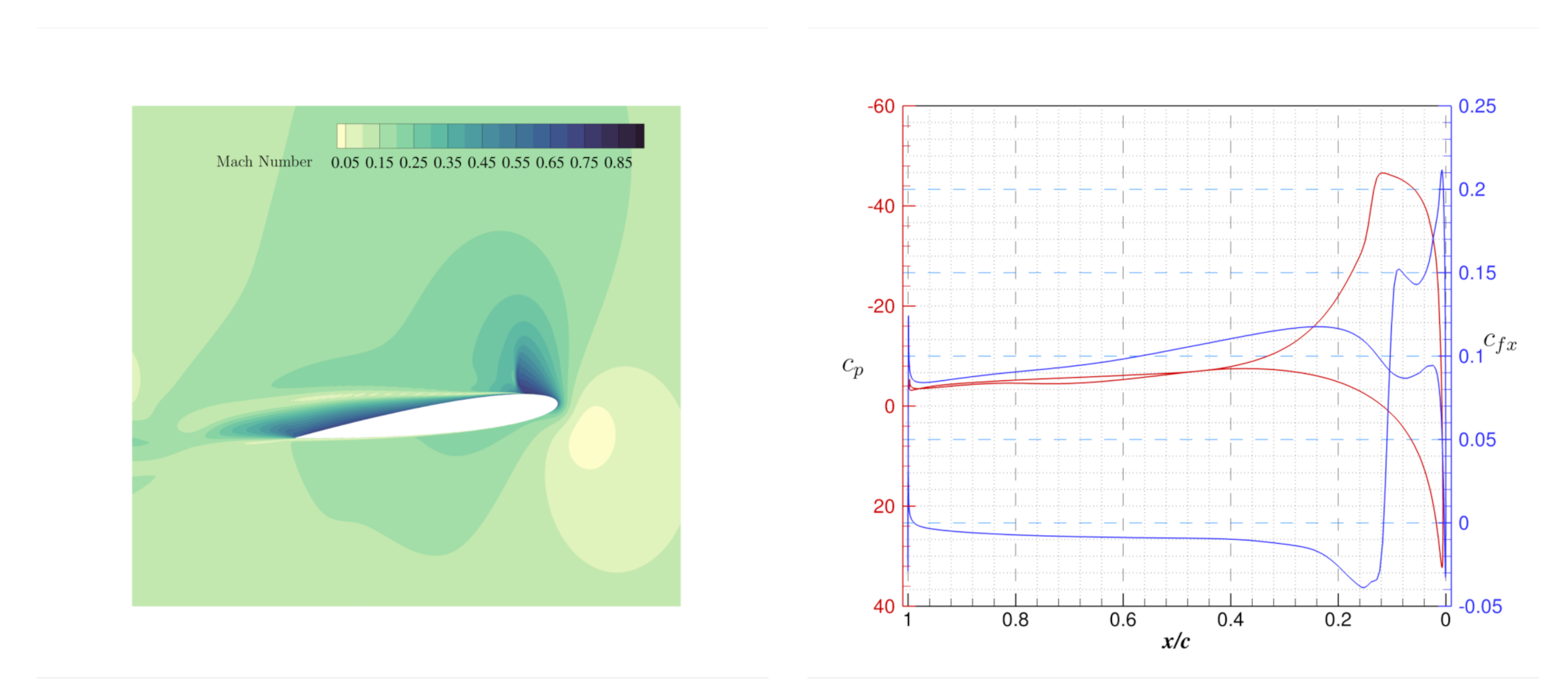
, far away from the other leading edge separation positions. In
Figure 15, we show the Mach contour, pressure coefficient
and skin-friction coefficient in the
x-direction
at radial location
at this azimuth angle. On the upper surface of the blade section,
drops from positive to negative and crosses 0 at
, where the
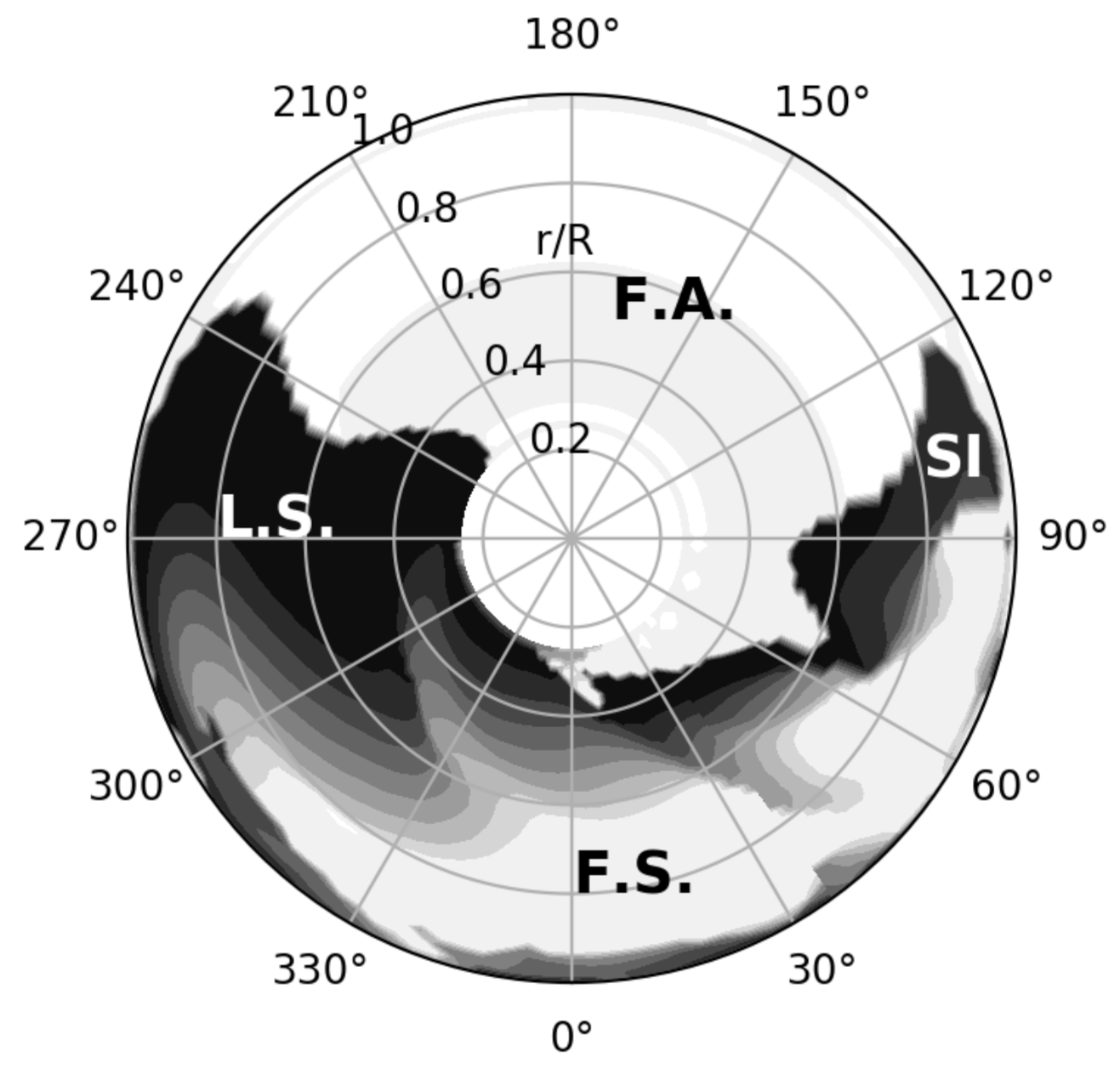
shows a sharp decrease. This separation is obviously a product of shock wave. Based on the discussion above, we can categorise the rotor map into four regions, namely fully attached region (F.A.), leading-edge separation region (L.S.), fully separated region (F.S.) and a shock induced separation region (SI). These regions are plotted in
Figure 16.
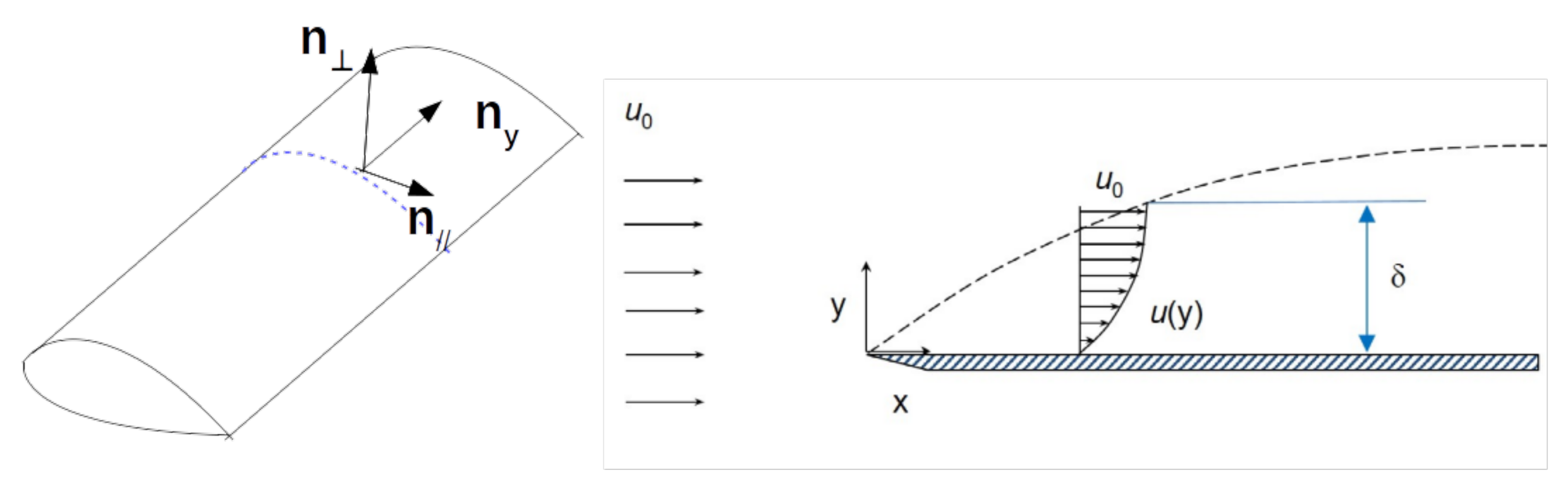
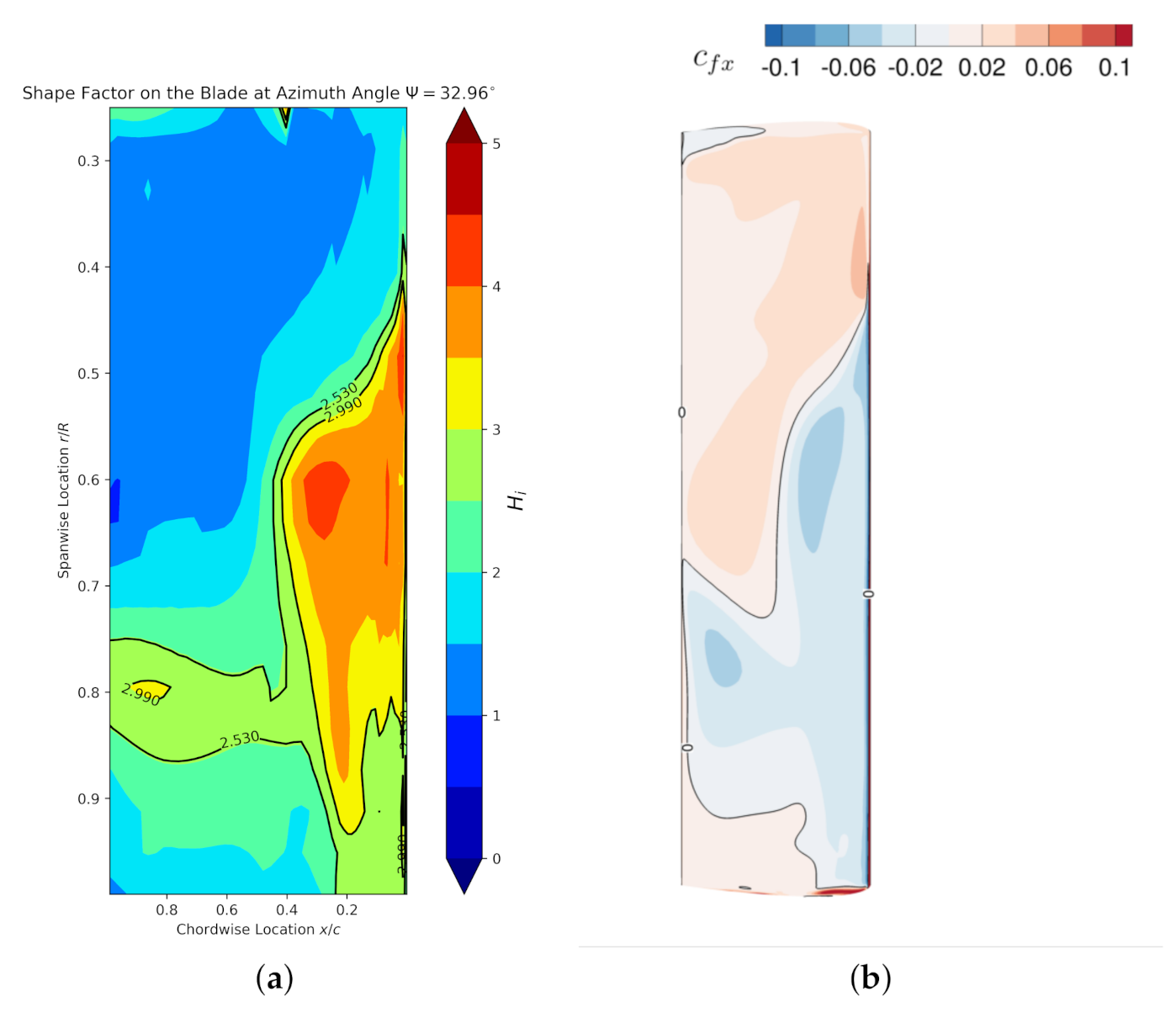
Another separation criterion that can be used (see [
21]) to detect separation in turbulence flows is based on the shape factor
, namely the ratio of the momentum thickness over displacement thickness of the boundary layer for a two-dimensional flow, as illustrated in
Figure 17:
Ref. [
32] stated that
is characteristic of the boundary separation, yet they did not give a sufficient criteria. In order to imply the concept on our rotating blade, we transformed all the velocity to the blade-section-fixed coordinate and dealt with the velocity parallel to the airfoil at different radial sections, as shown in
Figure 17, along
direction. The flow along radial direction is not considered when analysing the shape factor since observing from the blade, and the main component of the flow is perpendicular to the leading edge of the blade. The outer edge of the boundary layer is treated as the location where the velocity reached its maximum along the
direction. To determine how good this criterion can predict separation using only velocity field, we plot in
Figure 18 the shape factor and the skin-friction in the
x-direction at azimuth position
. The lower bound
shows quite a good agreement with the
x skin-friction contour on the blade surface. However, Ref. [
32] shows only the correlation of separation and shape factor
H in turbulent boundary layers, the utilisation of such criteria to detect separation should be considerably careful.
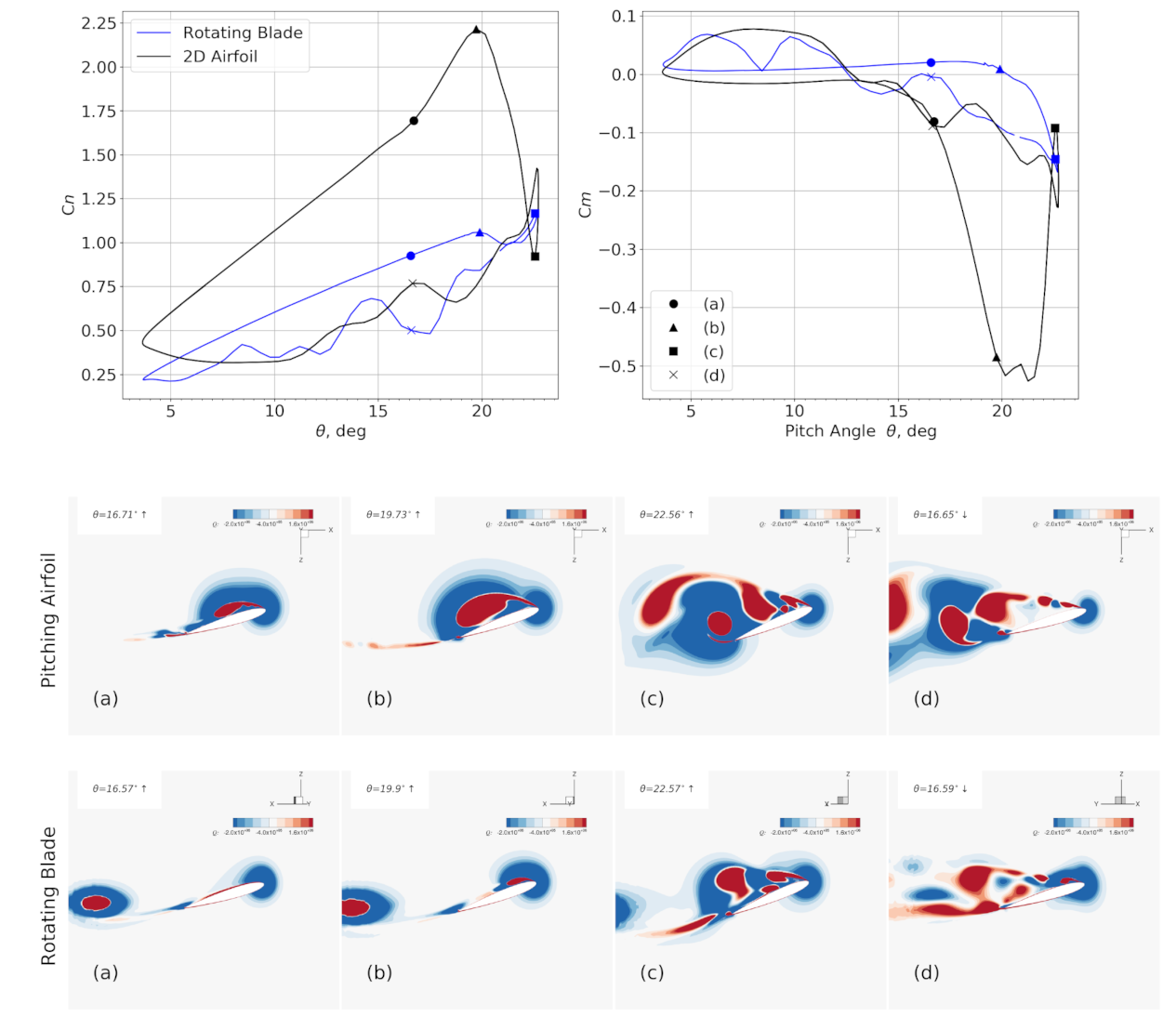
3.5. Comparison of Stall Events on a Pitching Airfoil and a Section of the Rotating Blade
In order to understand the differences of dynamic stall between a rotating blade section and a pitching airfoil with the same harmonic pitching, the force coefficients and the Q contours of both cases are plotted in
Figure 19. This spanwise location is exactly the center of the
-type dynamic stall vortex. The numerical investigation of a pitching airfoil satisfying Equation (
1) is explained in detail by [
34]. The main differences between the pitching airfoil (2D case) and the section of the three-dimensional rotating blade (3DR case) include: (1) the magnitude of the force coefficients (both
and
) differ significantly in the pitching-up phase; (2) the onset of the moment stall of the pitching airfoil is, in terms of the pitch angle, earlier than the blade section. However, the
curves are quite close in the pitching-down phase for both cases and the normal force stall occurs almost simultaneously.
The maximum normal force coefficient of the airfoil is 2.21 while the value of the blade section is only 1.16. In the process when the leading-edge vortex grows, there is an obvious increase of the slope , while this is not observed on the blade section. The normal force stalls for both cases are near , and, in the post-stall stage, normal force coefficients are relative close to each other. The extreme value of the moment coefficient of the 2D case is −0.52, while the counterpart on the rotating blade is only −0.145. The moment stall of the blade section lags behind that of the pitching airfoil, and is relatively milder.
Comparing the vortical structures at different dynamic stall stages, there seems to be a delayed LEV growth from (a) to (c). When the LEV is quite obvious on the pitching airfoil, the LEV is unable to be seen on the blade section at time (a). Time (b) for both cases are the stages before the shedding of LEV. However, both Q contours are comparable to each other at time (c), with both of them representing the aft-moving dynamic stall vortex. We see here that there is no phase of growing LEV on the blade section, as seen in time (b) of the 2D case. It seems that, at the moment when the LEV appears on the blade section, it pinches off immediately and moves aft-ward, which is significantly different from what happens on the 2D pitching airfoil. This strange behaviour of the LEV on the blade section is a consequence the following factors: (1) the effect of the induced velocity field in the rotating environment, which yields a smaller effective angle of attack (AoA) , and hence results in the delayed effect on the moment stall; (2) the outward transportation of y vorticity by the radial flow, which reduces the strength of the leading-edge vortex, and results in the lack of growth phase of the LEV on the blade section; (3) the -type vortex structure, which arches itself away from the surface, moves aft-ward and allows the vorticity that is transported from inboard to form a new LEV, and hence results in a strong increase in and a mild decrease of after the detachment of the LEV. Time (d) shows the pitching-down phase, where the vortex structures are similar to each other, apart from an obvious vortex in the vicinity of the blade section’s trailing edge. This is a consequence of the aforementioned factor (2): this vortex is transported from inboard. Moreover, the trailing-edge vortex on the blade section is more diffusive than the pitching airfoil.
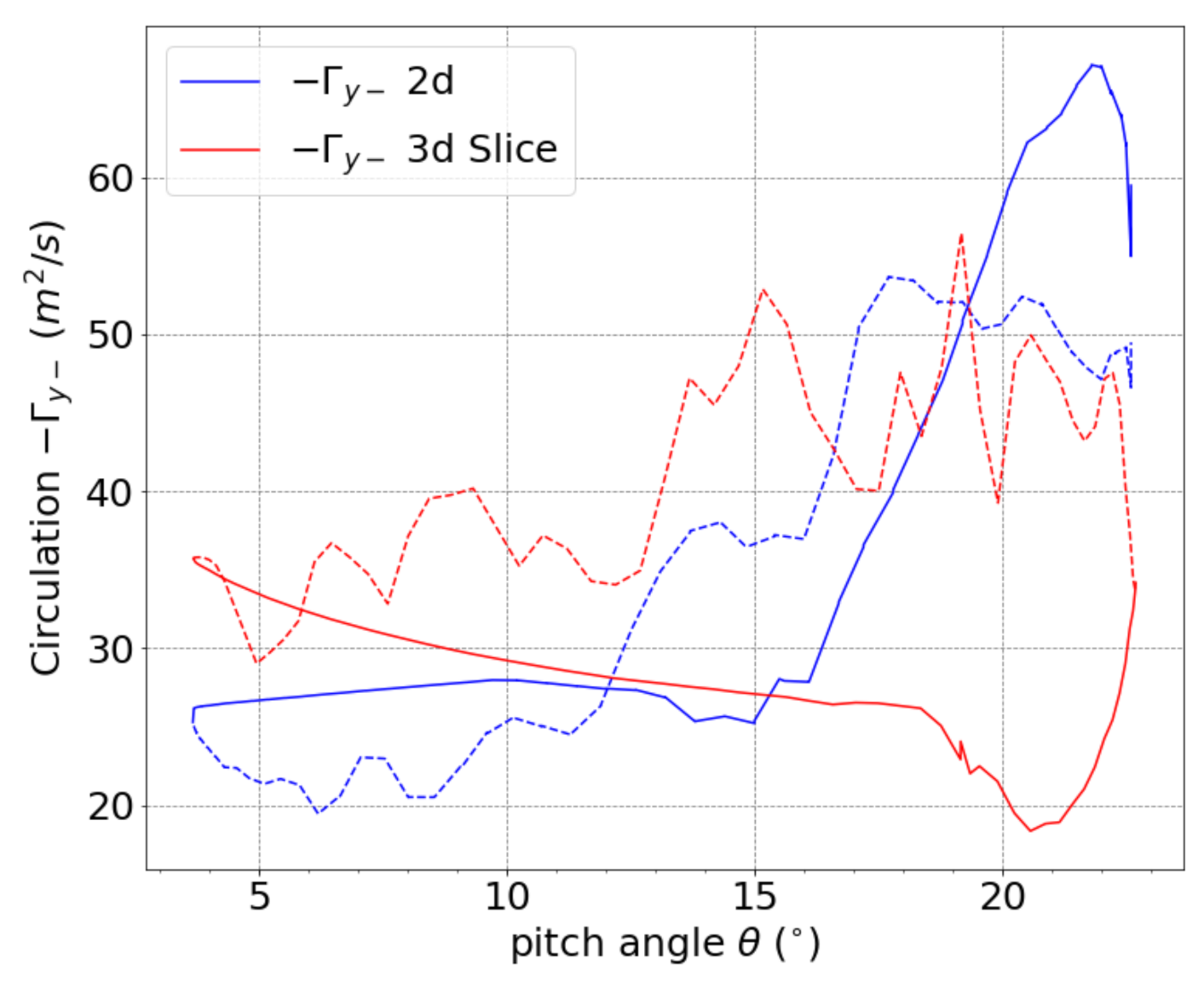
The vorticity
of the counter-clockwise rotating vortex over the upper surface of the airfoil in
Figure 19 is integrated and plotted in
Figure 20. This value interprets the strength of the LEV or DSV when the leading-edge separation occurs. The two curves have a similar trend, in the upward pitching phase, the curve of the circulation is quite flat. Then, after a light decrease they surge up and in the downward pitching phase, they attenuate in oscillation. There are still three major differences:
- (1)
The maximum circulation of the DSV in 2D case is larger;
- (2)
The oscillation of the 2D case in the downward pitching scenario is milder and the DSV strength of the 2D case is obviously smaller;
- (3)
There is a delay of 5.2 for the 3D rotating blade case when comparing the point of which the leading edge vortex begins to grow.
The first point can be explained as the lack of a third dimension for the vortex to grow, resulting in a concentration of vorticity. The second point can be explained as the continuing transportation of the vorticity from inboard, where the swell structure grows with the radial flow on the blade, as shown in
Figure 9. At azimuth angle
, the circulation of the 3D slice is clearly larger, which is also the effect of the continuous transportation of vorticity from inboard.
Figure 16 shows that, at this azimuth angle, the leading-edge separation still exists inboard. The third point can be explained as the combined effect of the induced velocity field
in the rotating environment and the outward transportation of vorticity by the radial flow. The induced velocity field means that the effective angle of attack on a rotor blade is different from that on a pitching airfoil:
; Additionally, the outward transportation of vorticity means that, unless an increase of
is present, the circulation over the blade section will not increase. Here,
“” is the side of the blade section towards root, and "" is the side of the blade section towards tip.
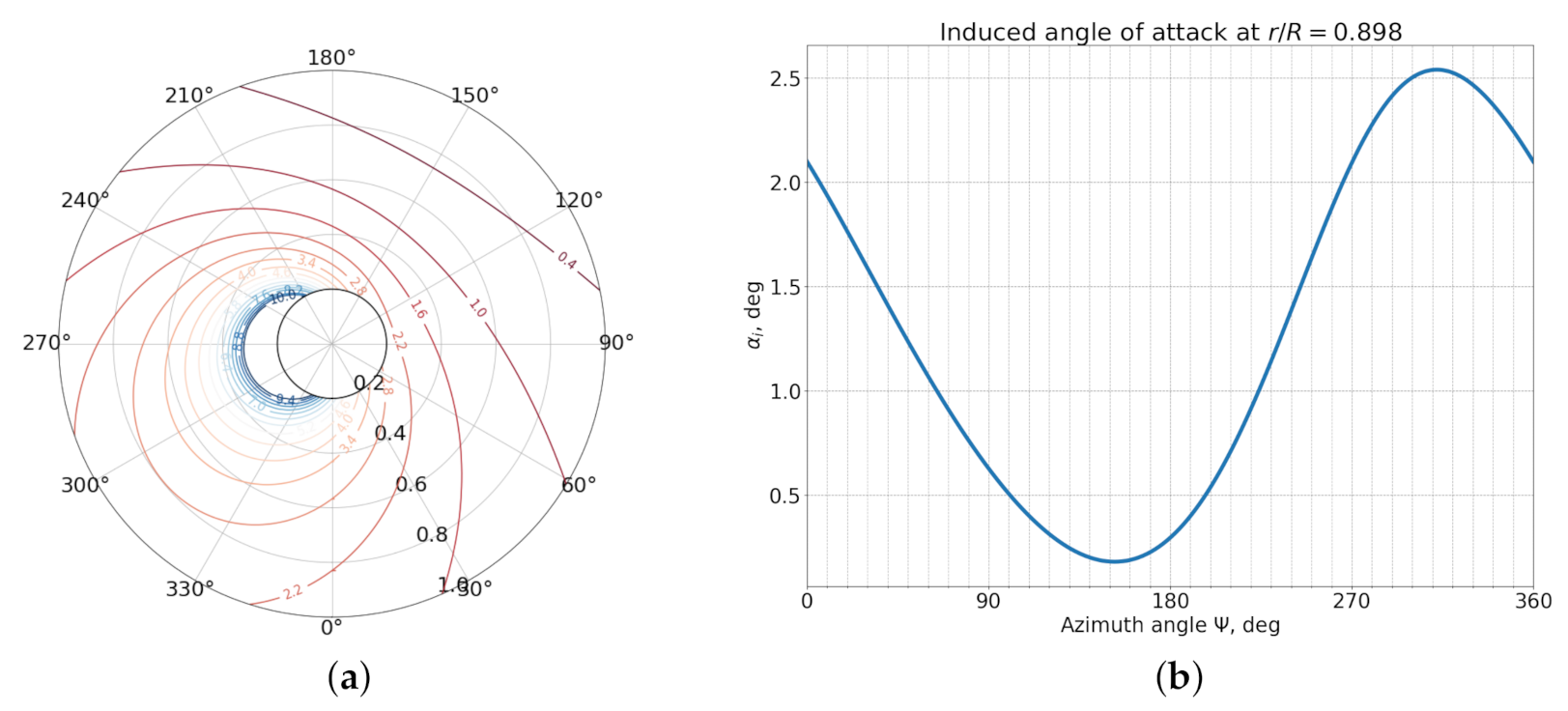
Blade element momentum theory (BEMT) is the lower order model that is widely used to predict the loads on the rotor disk. The in-flow sub-model is used for determining the effective angle of attack (AoA) for the blade elements. If we take the Drees linear inflow model [
35] and implement the momentum analysis on the rotor for our case, we can get the modelled induced AoA as shown in
Figure 21a,b. At the radial location
, the induced AoA
has a maximum value of 2.6
, which is smaller than 5.2
. Hence, the evaluation of transported circulation is another modelling factor to relate the stall event on the blade section to that on the pitching airfoil.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


























