Influence of Satellite Motion Control System Parameters on Performance of Space Debris Capturing



Abstract
:1. Introduction
2. Equations of Motions and Control Law
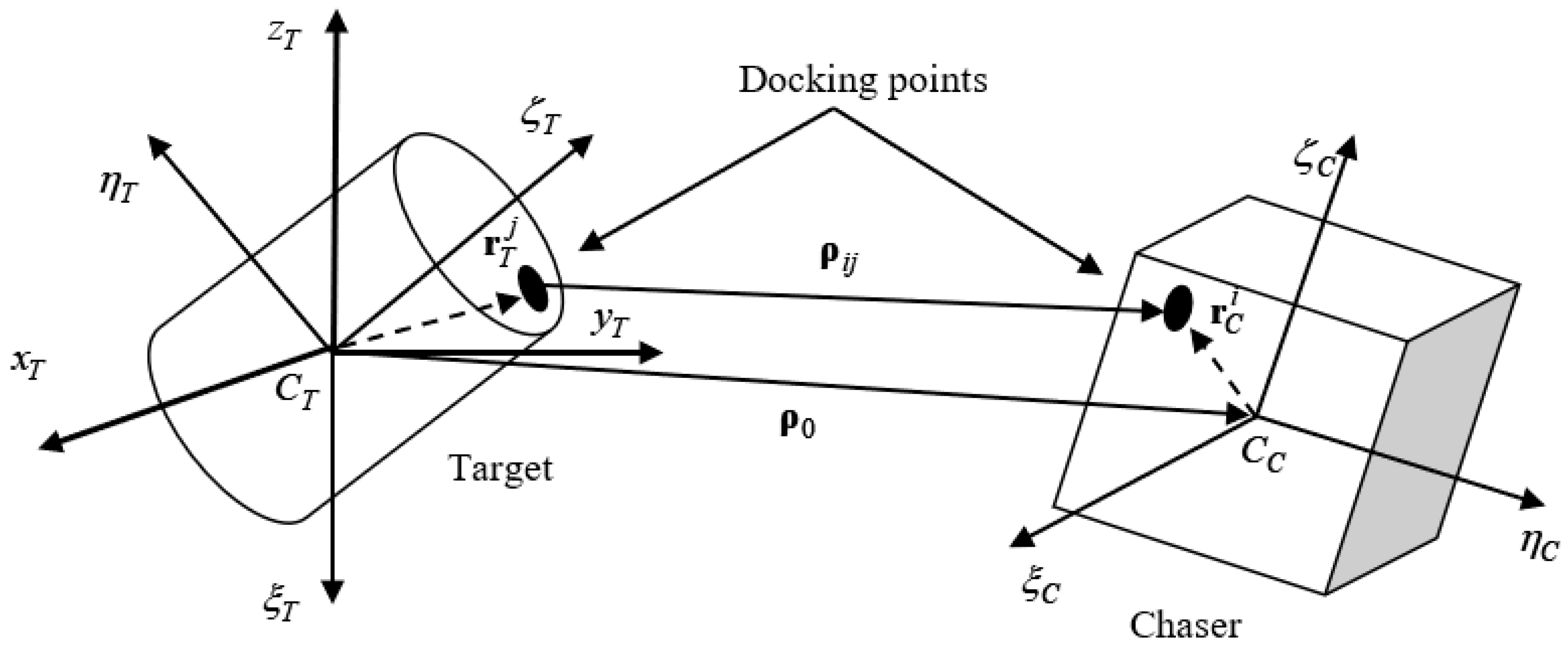
2.1. Relative Rotational and Translational Equations of Motion
2.2. Modified Coupled Translational Equations of Motion
2.3. SDRE Control Algorithm
2.4. Control Application to the Problem of Capturing
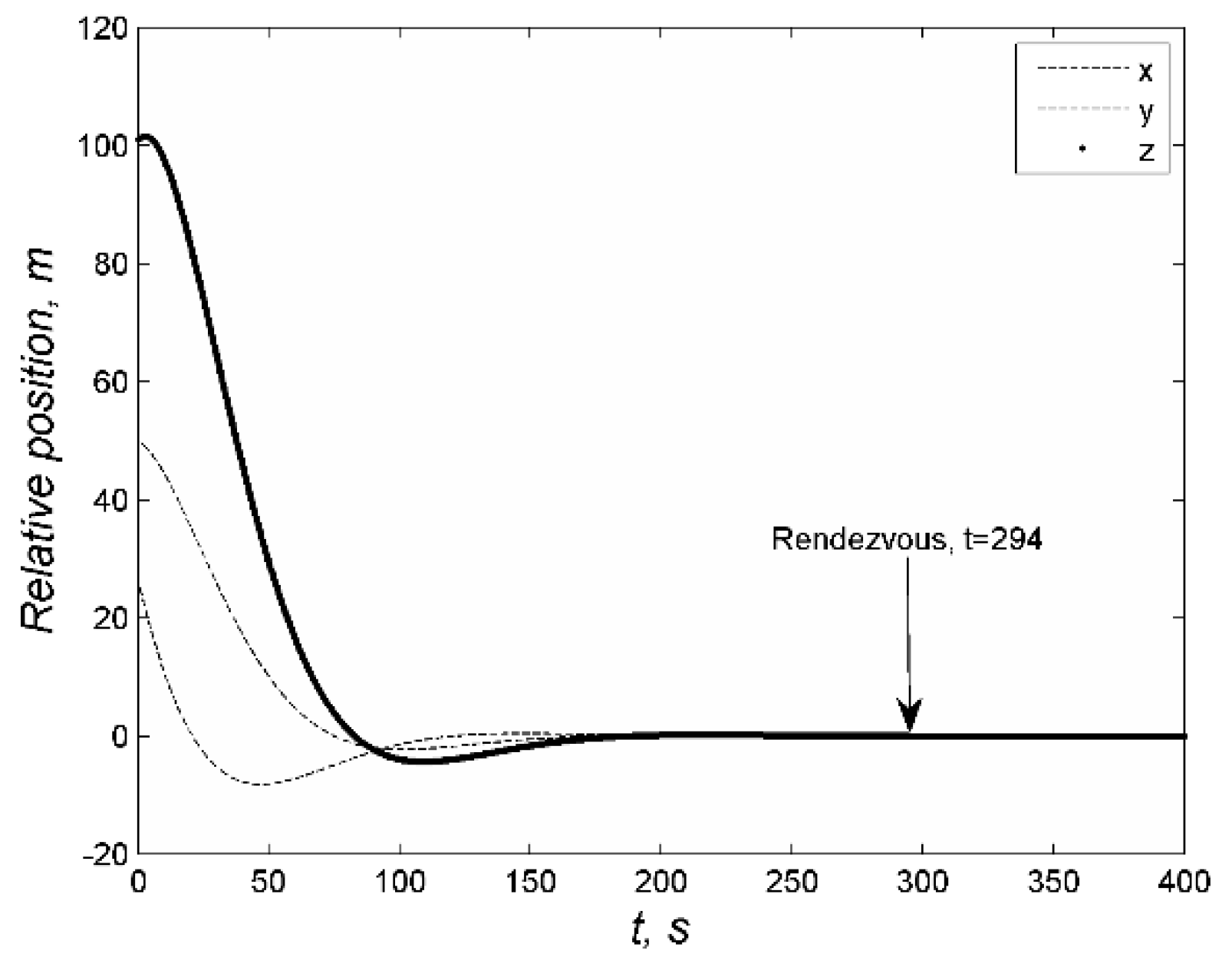
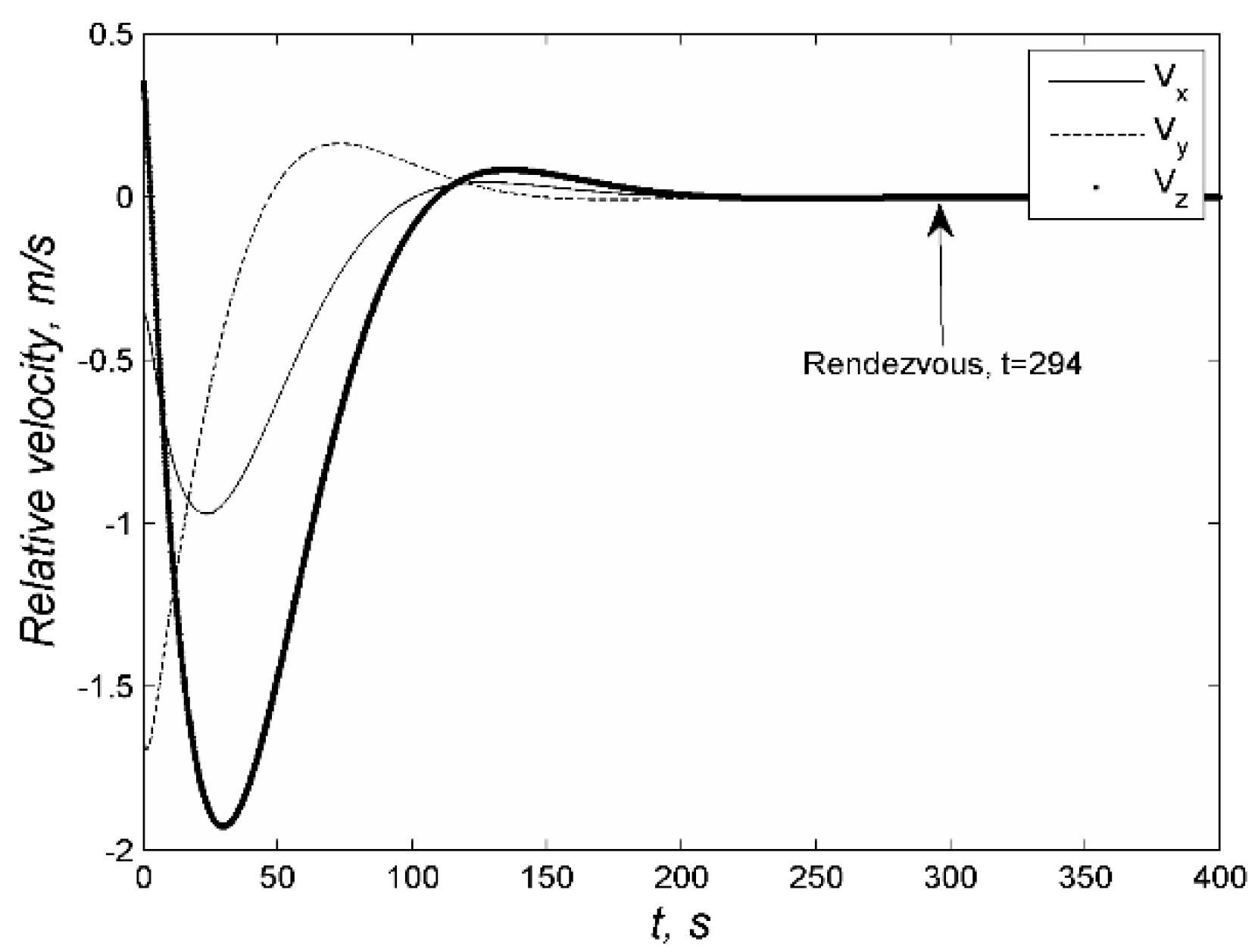
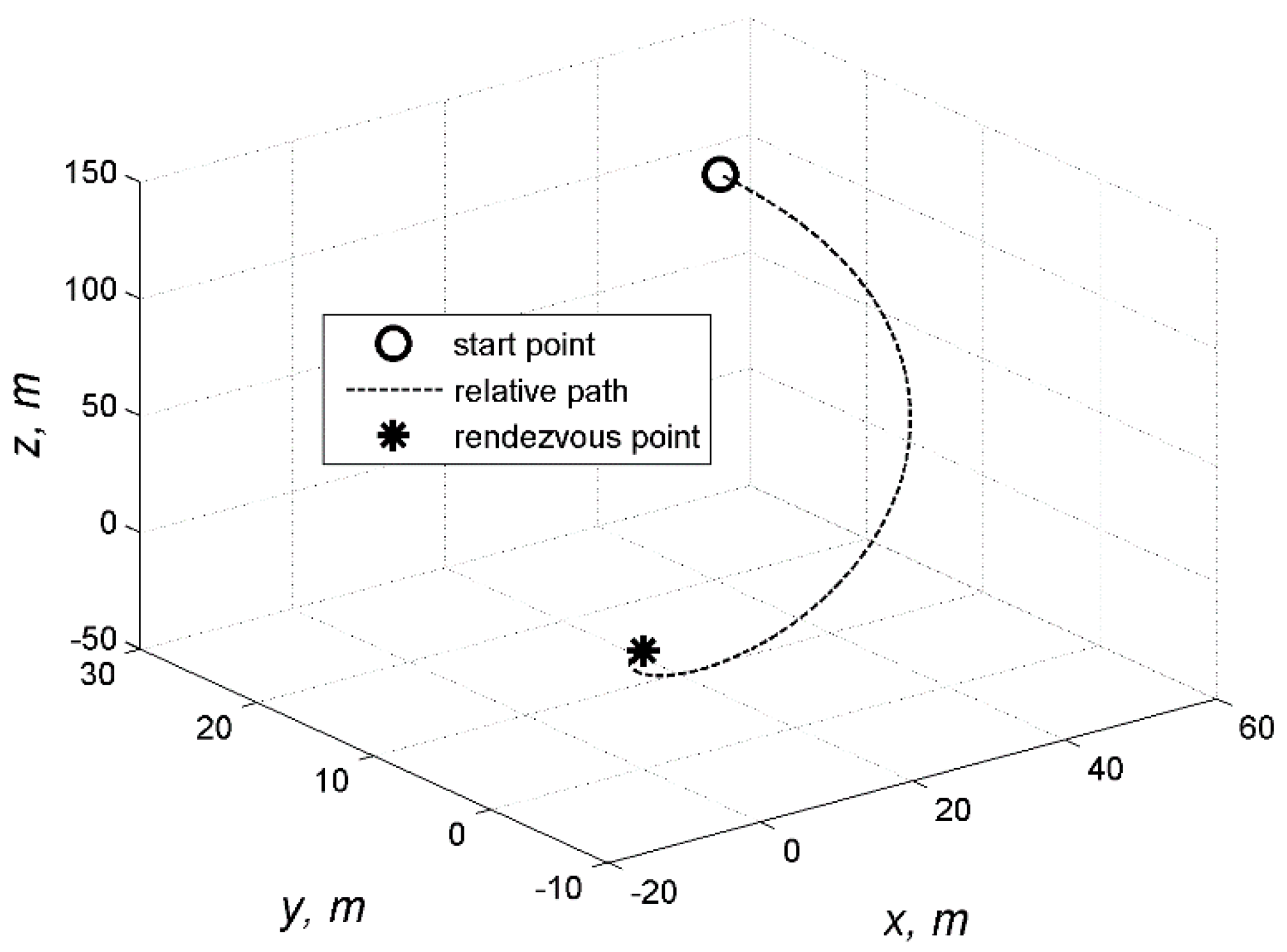
3. Numerical Study
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Aglietti, G.S.; Taylor, B.; Fellowes, S.; Salmon, T.; Retat, I.; Hall, A.; Chabot, T.; Pisseloup, A.; Cox, C.; Zarkesh, A.; et al. The active space debris removal mission RemoveDebris. Part 2: In orbit operations. Acta Astronaut. 2020, 168, 310–322. [Google Scholar] [CrossRef] [Green Version]
- Hakima, H.; Bazzocchi, M.C.F.; Emami, M.R. A deorbiter CubeSat for active orbital debris removal. Adv. Space Res. 2018, 61, 2377–2392. [Google Scholar] [CrossRef]
- Shan, M.; Guo, J.; Gill, E. Review and comparison of active space debris capturing and removal methods. Prog. Aerosp. Sci. 2016, 80, 18–32. [Google Scholar] [CrossRef]
- Bonnal, C.; Ruault, J.M.; Desjean, M.C. Active debris removal: Recent progress and current trends. Acta Astronaut. 2013, 85, 51–60. [Google Scholar] [CrossRef]
- Mark, C.P.; Kamath, S. Review of Active Space Debris Removal Methods. Space Policy 2019, 47, 194–206. [Google Scholar] [CrossRef]
- Kristensen, A.S.; Ulriksen, M.D.; Damkilde, L. Self-Deployable Deorbiting Space Structure for Active Debris Removal. J. Spacecr. Rocket. 2017, 54, 323–326. [Google Scholar] [CrossRef]
- Dalla Vedova, F.; Morin, P.; Roux, T.; Brombin, R.; Piccinini, A.; Ramsden, N. Interfacing Sail Modules for Use with “Space Tugs”. Aerospace 2018, 5, 48. [Google Scholar] [CrossRef] [Green Version]
- Trofimov, S.; Ovchinnikov, M. Sail-Assisted End-of-Life Disposal of Low-Earth Orbit Satellites. J. Guid. Control Dyn. 2017, 40, 1796–1805. [Google Scholar] [CrossRef]
- Smith, B.G.A.; Capon, C.J.; Brown, M.; Boyce, R.R. Ionospheric drag for accelerated deorbit from upper low earth orbit. Acta Astronaut. 2020, 176, 520–530. [Google Scholar] [CrossRef]
- Felicetti, L.; Gasbarri, P.; Pisculli, A.; Sabatini, M.; Palmerini, G.B. Design of robotic manipulators for orbit removal of spent launchers’ stages. Acta Astronaut. 2016, 119, 118–130. [Google Scholar] [CrossRef]
- Benvenuto, R.; Lavagna, M.; Salvi, S. Multibody dynamics driving GNC and system design in tethered nets for active debris removal. Adv. Space Res. 2016, 58, 45–63. [Google Scholar] [CrossRef]
- Botta, E.M.; Miles, C.; Sharf, I. Simulation and tension control of a tether-actuated closing mechanism for net-based capture of space debris. Acta Astronaut. 2020, 174, 347–358. [Google Scholar] [CrossRef]
- Dudziak, R.; Tuttle, S.; Barraclough, S. Harpoon technology development for the active removal of space debris. Adv. Space Res. 2015, 56, 509–527. [Google Scholar] [CrossRef]
- Aslanov, V.; Yudintsev, V. Dynamics of large space debris removal using tethered space tug. Acta Astronaut. 2013, 91, 149–156. [Google Scholar] [CrossRef]
- Zhang, J.; Ye, D.; Biggs, J.D.; Sun, Z. Finite-time relative orbit-attitude tracking control for multi-spacecraft with collision avoidance and changing network topologies. Adv. Space Res. 2019, 63, 1161–1175. [Google Scholar] [CrossRef]
- Zhang, J.; Biggs, J.D.; Ye, D.; Sun, Z. Extended-State-Observer-Based Event-Triggered Orbit-Attitude Tracking for Low-Thrust Spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2872–2883. [Google Scholar] [CrossRef]
- Zhang, J.; Biggs, J.D.; Ye, D.; Sun, Z. Finite-time attitude set-point tracking for thrust-vectoring spacecraft rendezvous. Aerosp. Sci. Technol. 2020, 96, 105588. [Google Scholar] [CrossRef]
- Hartley, E.N.; Trodden, P.A.; Richards, A.G.; Maciejowski, J.M. Model predictive control system design and implementation for spacecraft rendezvous. Control Eng. Pract. 2012, 20, 695–713. [Google Scholar] [CrossRef] [Green Version]
- Breger, L.S.; How, J.P. Safe Trajectories for Autonomous Rendezvous of Spacecraft. J. Guid. Control Dyn. 2008, 31, 1478–1489. [Google Scholar] [CrossRef]
- Liu, X.; Lu, P. Solving Nonconvex Optimal Control Problems by Convex Optimization. J. Guid. Control Dyn. 2014, 37, 750–765. [Google Scholar] [CrossRef]
- Lu, P.; Liu, X. Autonomous Trajectory Planning for Rendezvous and Proximity Operations by Conic Optimization. J. Guid. Control Dyn. 2013, 36, 375–389. [Google Scholar] [CrossRef]
- Ventura, J.; Ciarcià, M.; Romano, M.; Walter, U. Fast and Near-Optimal Guidance for Docking to Uncontrolled Spacecraft. J. Guid. Control Dyn. 2017, 40, 3138–3154. [Google Scholar] [CrossRef]
- Sabatini, M.; Palmerini, G.B.; Gasbarri, P. A testbed for visual based navigation and control during space rendezvous operations. Acta Astronaut. 2015, 117, 184–196. [Google Scholar] [CrossRef]
- Ivanov, D.; Koptev, M.; Ovchinnikov, M.; Tkachev, S.; Proshunin, N.; Shachkov, M. Flexible microsatellite mock-up docking with non-cooperative target on planar air bearing test bed. Acta Astronaut. 2018, 153, 357–366. [Google Scholar] [CrossRef]
- Cloutier, J.R.; Stansbery, D.T. The capabilities and art of state-dependent Riccati equation-based design. In Proceedings of the 2002 American Control Conference (IEEE Cat. No.CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 1, pp. 86–91. [Google Scholar]
- Cloutier, J.R.; Cockburn, J.C. The state-dependent nonlinear regulator with state constraints. Proc. Am. Control Conf. 2001, 1, 390–395. [Google Scholar] [CrossRef]
- Çimen, T. Survey of State-Dependent Riccati Equation in Nonlinear Optimal Feedback Control Synthesis. J. Guid. Control Dyn. 2012, 35, 1025–1047. [Google Scholar] [CrossRef]
- Navabi, M.; Reza Akhloumadi, M. Nonlinear Optimal Control of Orbital Rendezvous Problem for Circular and Elliptical Target Orbit. Modares Mech. Eng. 2016, 15, 132–142. [Google Scholar]
- Felicetti, L.; Palmerini, G.B. A comparison among classical and SDRE techniques in formation flying orbital control. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013. [Google Scholar]
- Stansbery, D.T.; Cloutier, J.R. Position and attitude control of a spacecraft using the state-dependent Riccati equation technique. Proc. Am. Control Conf. 2000, 3, 1867–1871. [Google Scholar] [CrossRef]
- Segal, S.; Gurfil, P. Effect of Kinematic Rotation-Translation Coupling on Relative Spacecraft Translational Dynamics. J. Guid. Control Dyn. 2009, 32, 1045–1050. [Google Scholar] [CrossRef]
- Lee, D.; Bang, H.; Butcher, E.A.; Sanyal, A.K. Kinematically Coupled Relative Spacecraft Motion Control Using the State-Dependent Riccati Equation Method. J. Aerosp. Eng. 2015, 28, 04014099. [Google Scholar] [CrossRef]
- Navabi, M.; Akhloumadi, M.R. Nonlinear Optimal Control of Relative Rotational and Translational Motion of Spacecraft Rendezvous. J. Aerosp. Eng. 2017, 30, 04017038. [Google Scholar] [CrossRef]
- Alfriend, K.T. Spacecraft Formation Flying: Dynamics, Control and Navigation; Elsevier/Butterworth-Heinemann: Oxford, UK, 2010; ISBN 9780750685337. [Google Scholar]
- Akhloumadi, M.; Ivanov, D. Satellite relative motion SDRE-based control for capturing a noncooperative tumbling object. In Proceedings of the 9th International Conference on Recent Advances in Space Technologies, RAST 2019, Istanbul, Turkey, 11–14 June 2019; pp. 253–260. [Google Scholar]
- Kirk, D.E. Optimal Control Theory: An Introduction; Prentice-Hall: Upper Saddle River, NJ, USA, 1970; ISBN 9780486434841. [Google Scholar]
- Massari, M.; Zamaro, M. Application of SDRE technique to orbital and attitude control of spacecraft formation flying. Acta Astronaut. 2014, 94, 409–420. [Google Scholar] [CrossRef]
- Clohessy, W.H.; Wiltshire, R.S. Terminal Guidance System for Satellite Rendezvous. J. Astronaut. Sci. 1960, 27, 653–678. [Google Scholar] [CrossRef]
- Laub, A.J. Schur Method For Solving Algebraic Riccati Equations. In Proceedings of the IEEE Conference on Decision and Control, San Diego, CA, USA, 10–12 January 1979; pp. 60–65. [Google Scholar]
- Lancaster, P.; Rodman, L. Algebraic Riccati Equations; Clarendon Press: Oxford, UK, 1995; ISBN 9780198537953. [Google Scholar]
- Miniature Reaction Wheels Interface Connector Mounting Flange. Available online: www.honeywell.com/space/CEM (accessed on 27 October 2020).
- Ivanov, D.; Ovchinnikov, M.; Sakovich, M. Relative Pose and Inertia Determination of Unknown Satellite Using Monocular Vision. Int. J. Aerosp. Eng. 2018, 1–16. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbital Parameters | Initial Conditions | ||
|---|---|---|---|
| Altitude, km | 750 | ||
| Eccentricity | 0.03 | ||
| Inclination, deg | 70 | , m | |
| Right ascension, deg | 50 | ||
| Argument of perigee, deg | 80 | ||
| Initial true anomaly | 0 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akhloumadi, M.; Ivanov, D. Influence of Satellite Motion Control System Parameters on Performance of Space Debris Capturing. Aerospace 2020, 7, 160. https://doi.org/10.3390/aerospace7110160
Akhloumadi M, Ivanov D. Influence of Satellite Motion Control System Parameters on Performance of Space Debris Capturing. Aerospace. 2020; 7(11):160. https://doi.org/10.3390/aerospace7110160
Chicago/Turabian StyleAkhloumadi, Mahdi, and Danil Ivanov. 2020. "Influence of Satellite Motion Control System Parameters on Performance of Space Debris Capturing" Aerospace 7, no. 11: 160. https://doi.org/10.3390/aerospace7110160