Fabrication and Testing of the Cold Gas Propulsion System Flight Unit for the Adelis-SAMSON Nano-Satellites


Abstract
:1. Introduction
1.1. The Adelis-SAMSON Project
1.2. Propulsion System Requirements
2. Propulsion System Design and Architecture
2.1. Propulsion Technology and Conceptual Design
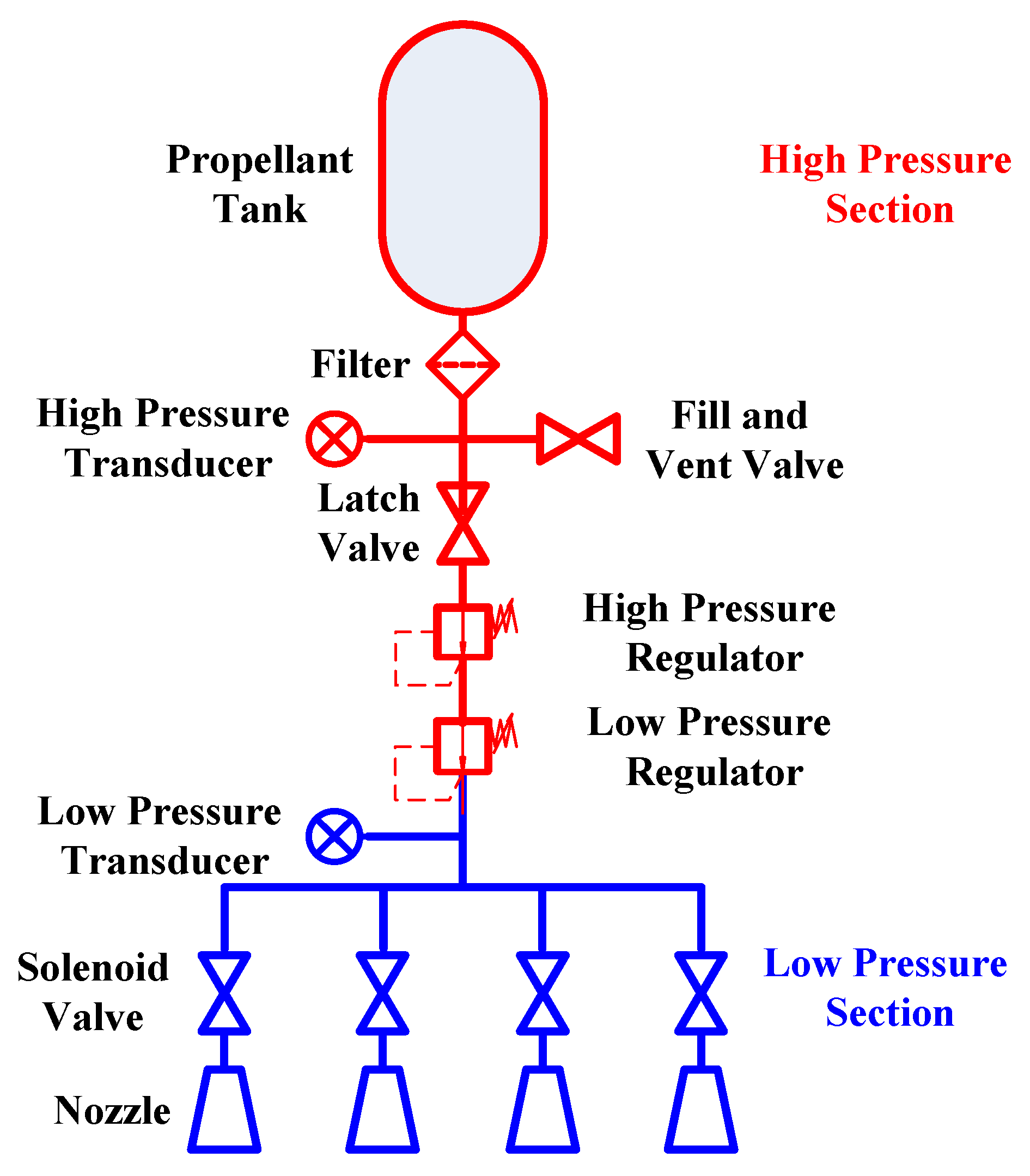
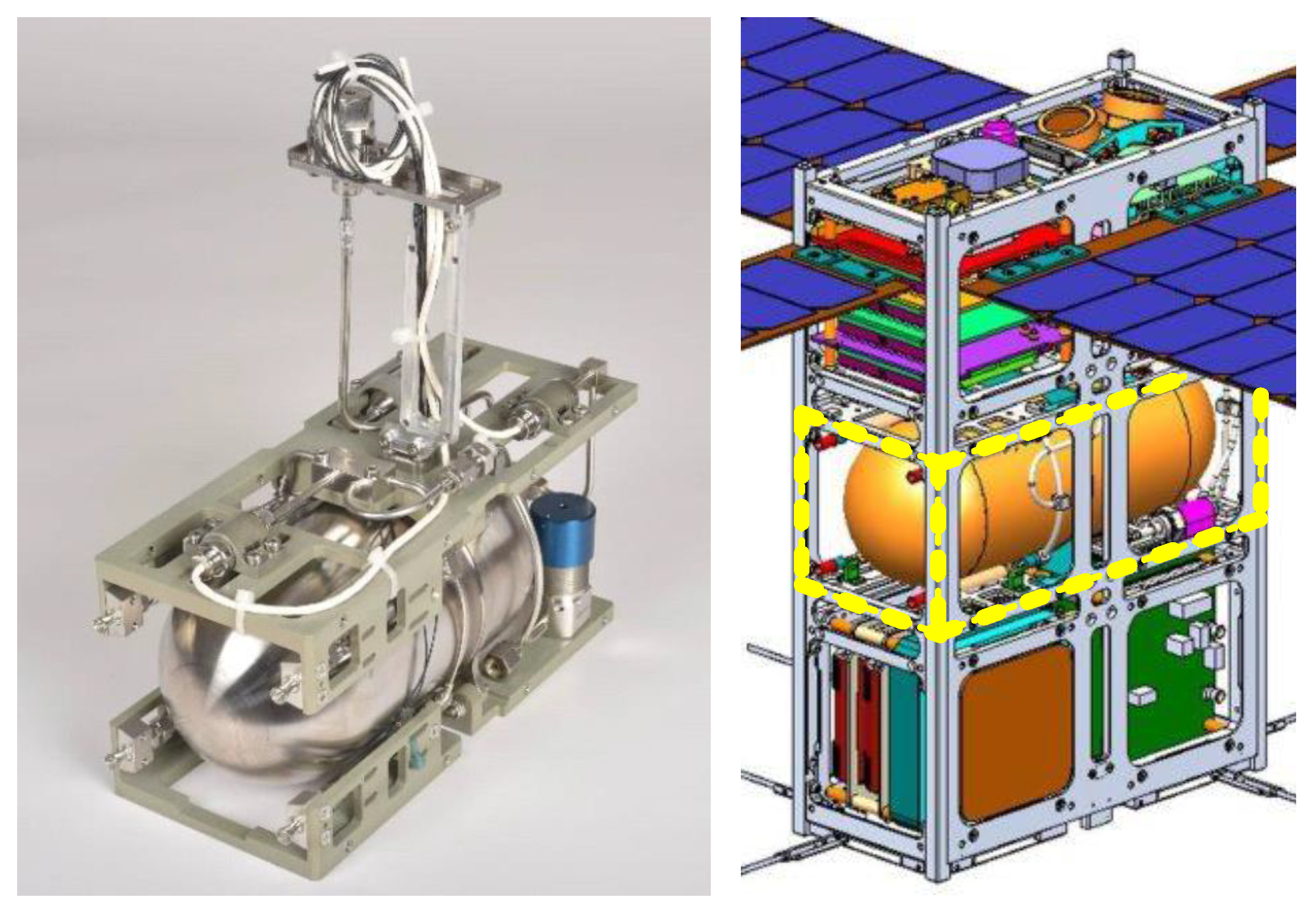
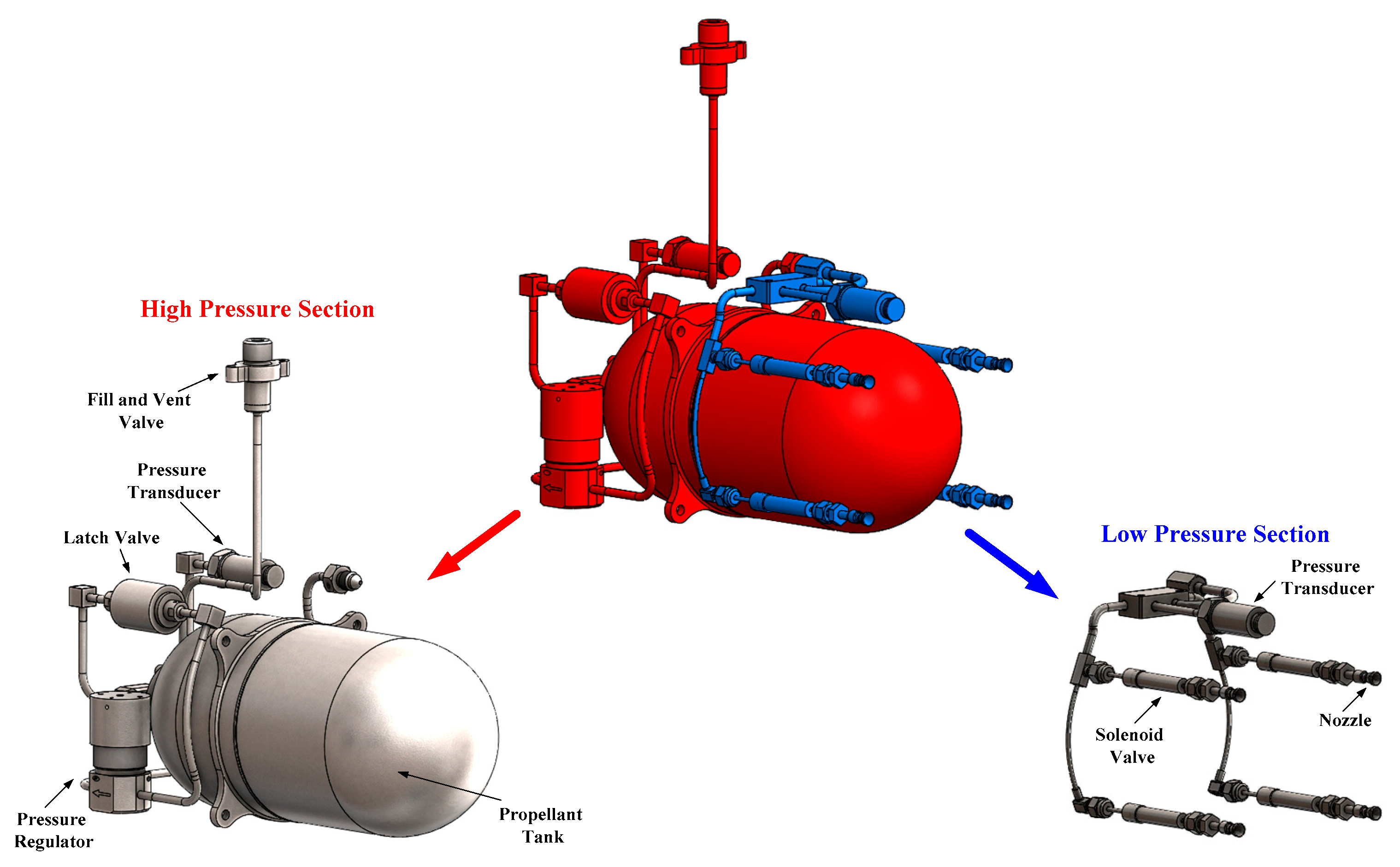
2.2. Propulsion System Architecture
3. Propellant Tank
3.1. Propellant Tank Description
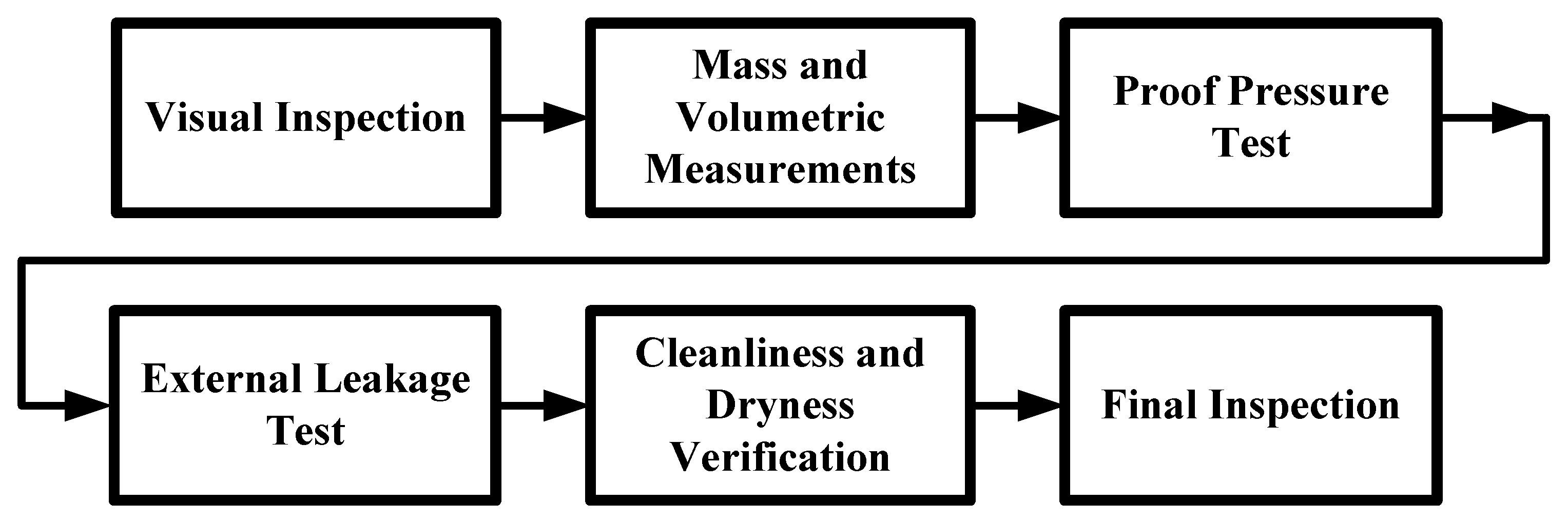
3.2. Propellant Tank Tests and Qualification
4. Thruster Assembly
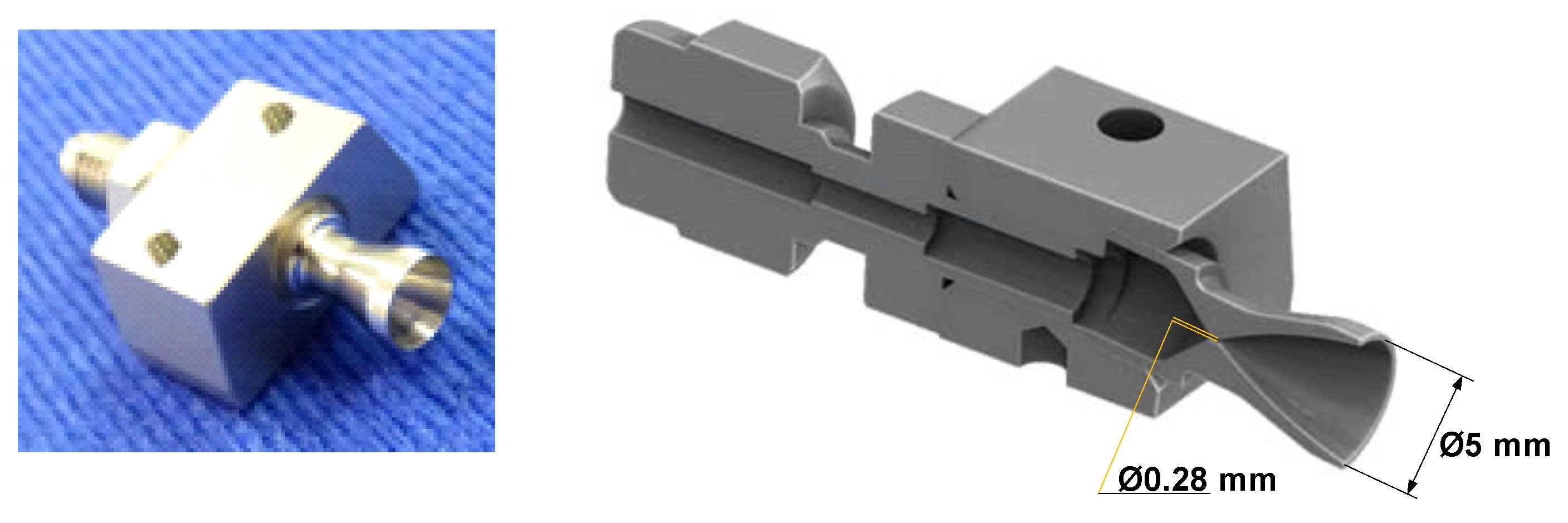
4.1. Thruster Assembly Design Description
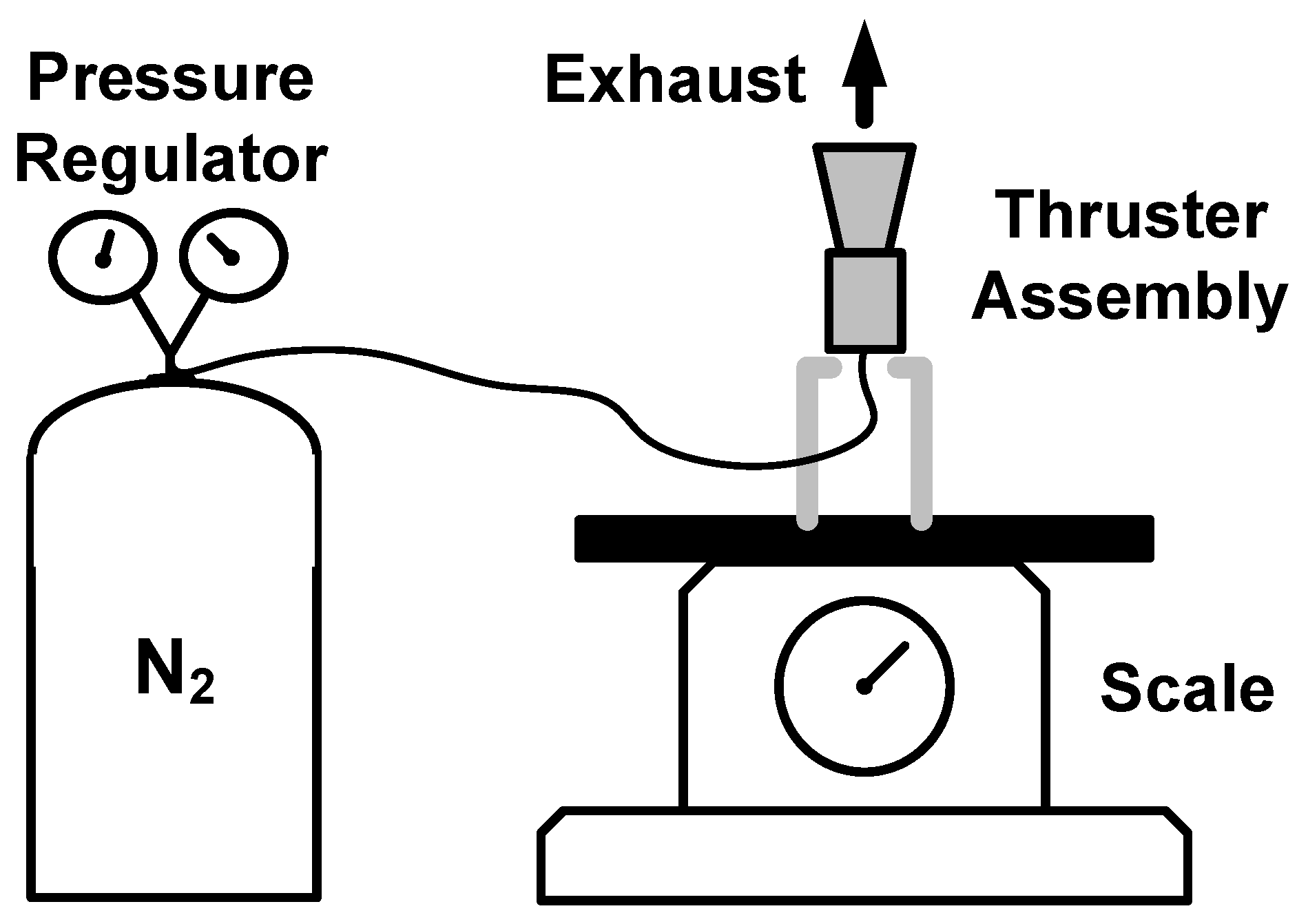
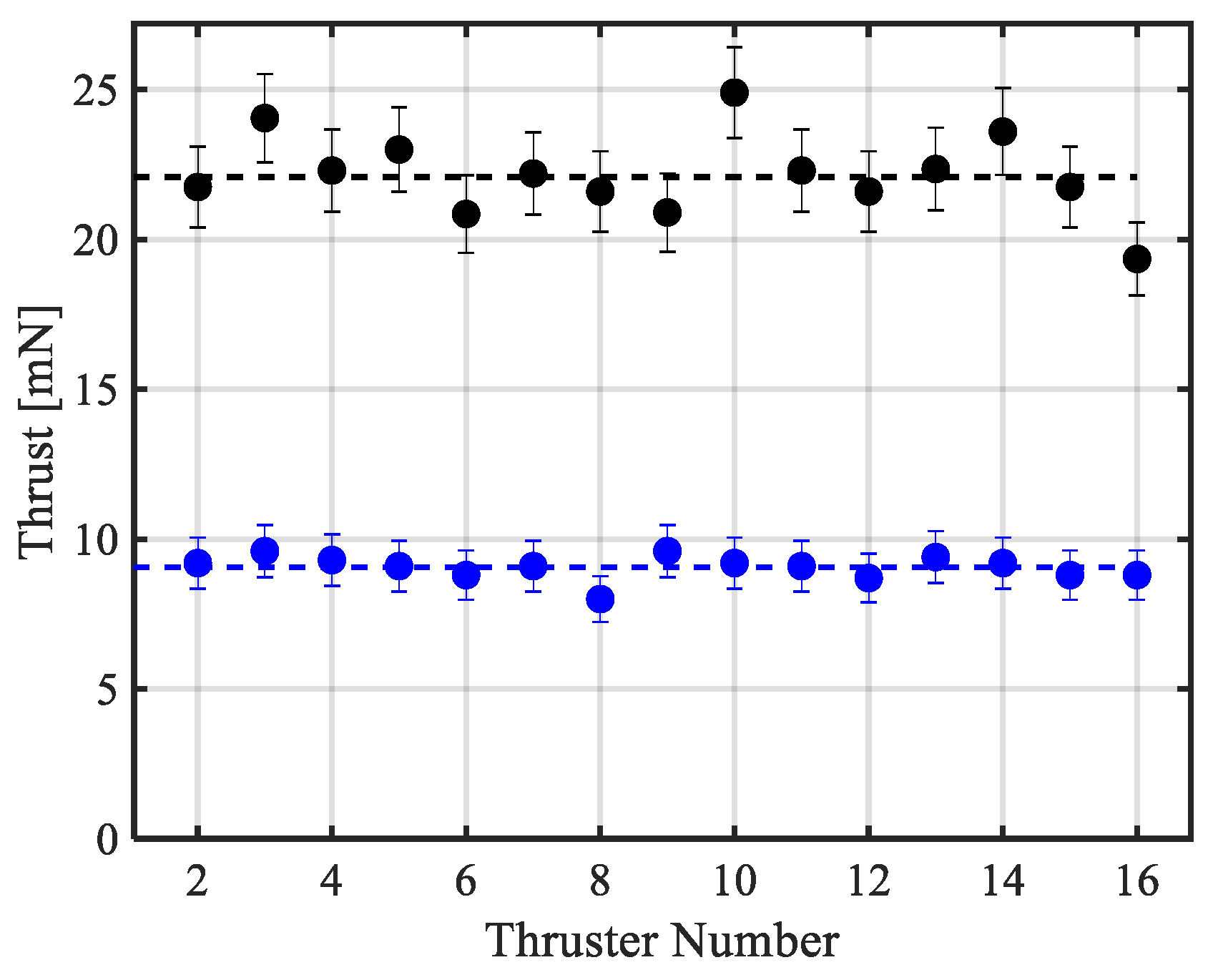
4.2. Thruster Design Validation
5. Pressure Regulator
6. Fill and Vent Valve
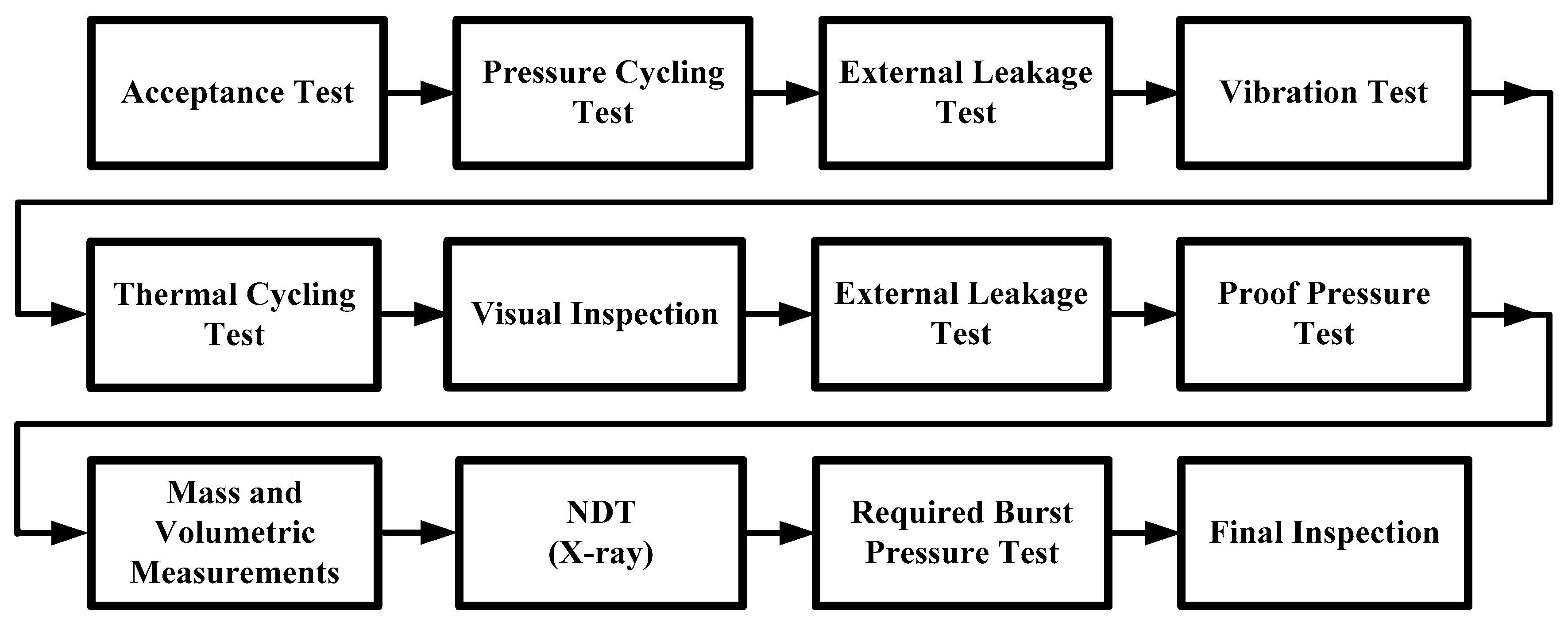
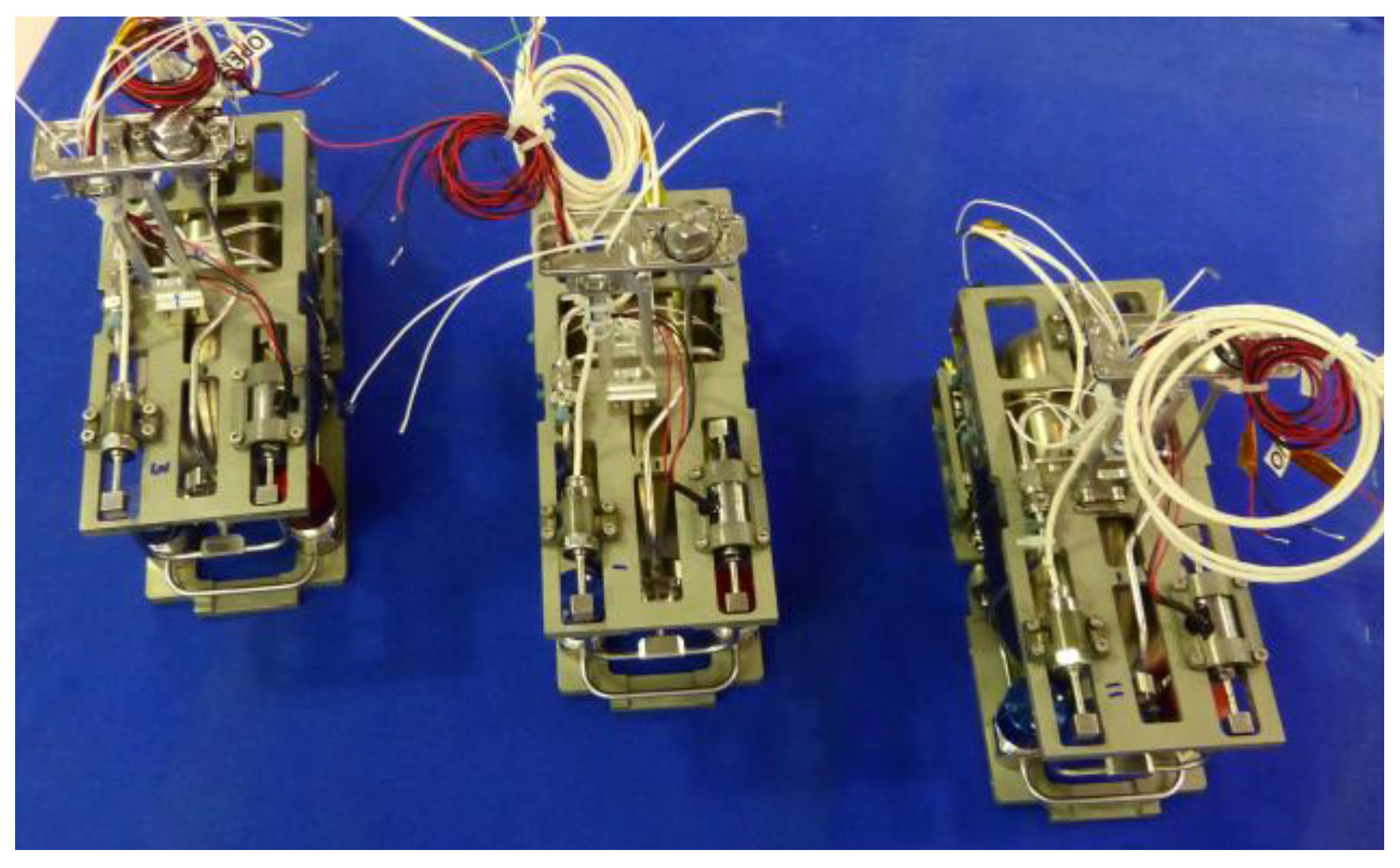
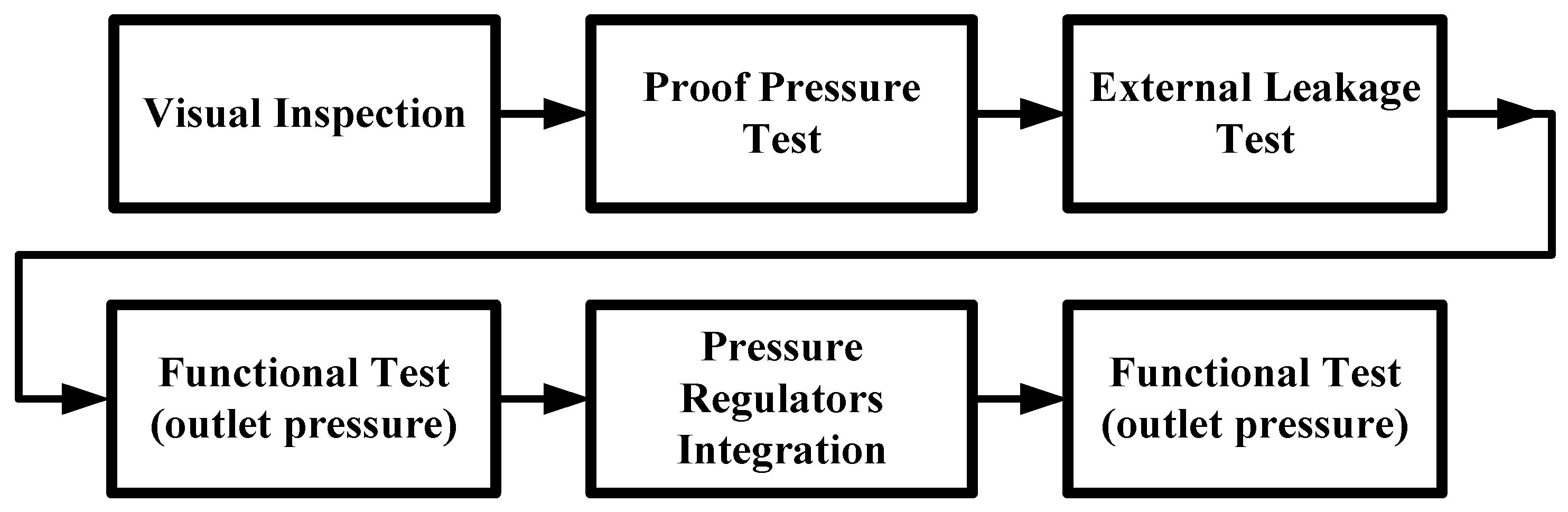
7. Propulsion System Integration and Tests
8. Concept of Operations
- (a)
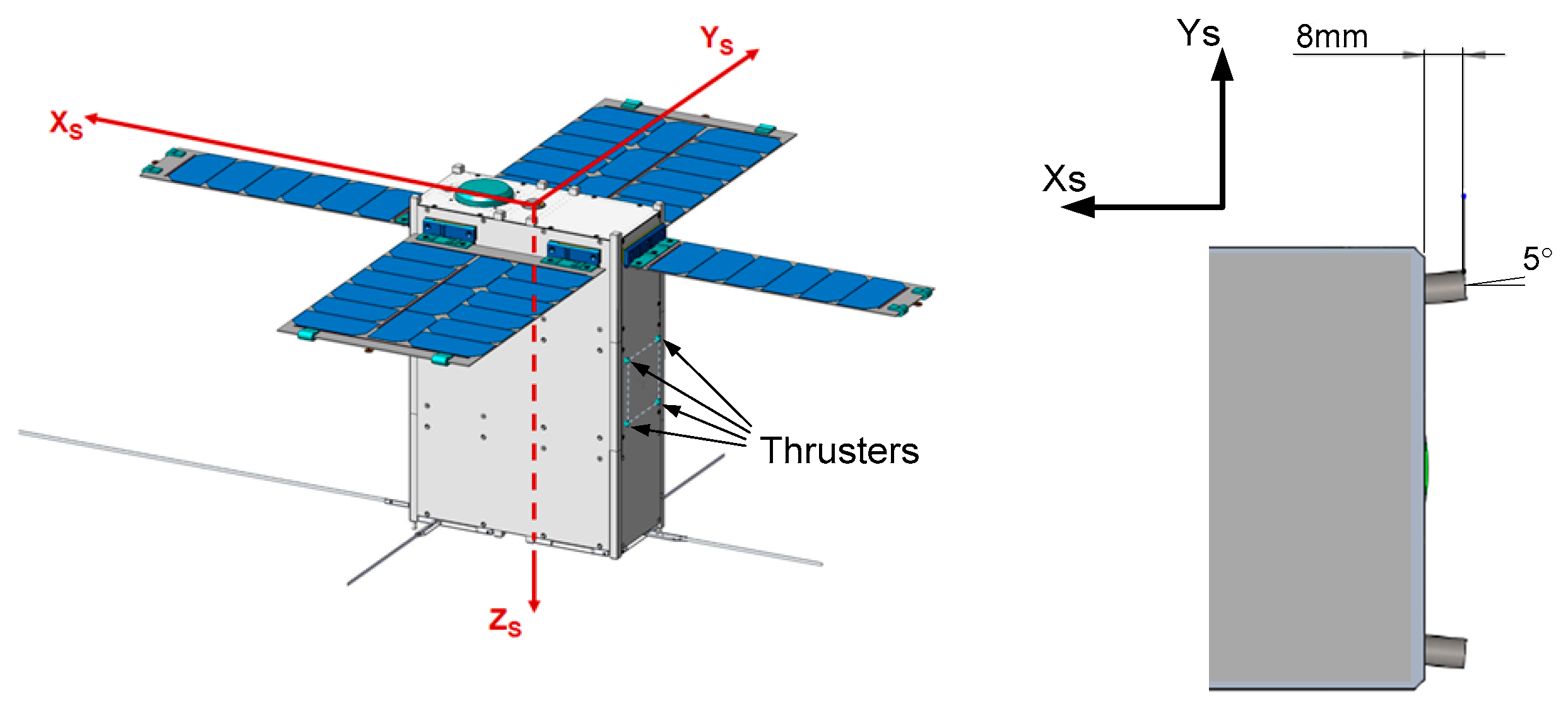
- Maintaining satellite formation—To maintain satellite formation, each satellite operates all four thrusters simultaneously for the duration of 3 s, thus generating an impulse bit of approximately 0.25 N-s. Each propulsion system contains sufficient propellant to allow for over 500 such operations. Due to thruster positioning symmetry (see Figure 10), operation of all four thrusters simultaneously greatly reduces the generation of parasitic moments, resulting in each thruster’s installation angle. To optimize each satellite maneuver, the thrusters are operated on the ascending node. Orbit corrections may be performed once in every orbit lap until the desired semi-major axis is reached for the maneuvering satellite. Ultimately, allocating each satellite on a different orbit with different altitudes enables one to control the relative distances between the satellites.The propulsion system operation philosophy is as follows. The three nano-satellites constantly assess the relative along-track distance (), relative mean semi-major axis (, and relative mean argument of latitude (). If the relative distance is outside the pre-defined envelope of 1 km (dmin)–250 km (dmax), then the nano-satellites will operate their propulsion systems according to the following algorithm presented in Equation (3) and alternatively in Table 5.where TV is the thrust vector that can only be pointed in the direction of the satellite’s velocity vector (negative or positive) with constant thrust (Tconst). The i and j indices represent the satellite indices as this controller can support a formation of N satellites.The benefits of the above algorithm are:
- Cyclic algorithm to reduce inter-satellite data traffic.
- Constant thrust (Tconst) at a constant duration maneuver. A short maneuver (several seconds during each operation) makes it unnecessary to change the satellite attitude during thrust generation. Thrust is applied only in the velocity vector direction (TV).
- Slow control cycle. Maneuvers are conducted only on the ascending node during daytime. If the maneuver is insufficient to complete the required orbit correction, then an additional maneuver is applied on the next lap.
It should be noted that to perform the maneuvers without any parasitic moments induced on the nano-satellite, the thrust generated by each thruster should be as close as possible to that generated by the other thrusters. By the same token, an applied thrust of precisely 20 mN per thruster is not necessary. In fact, if the generated thrust is much lower or higher yet at the same order of magnitude as the thrust requirement, then all maneuvers can still be executed successfully by operating the thrusters more, or fewer, times to reach the desired orbit. - (b)
- Launch positioning corrections—Due to satellite injection during launch, the three nano-satellites may start drifting from one another, depending on their initial release velocity vectors. To prevent drifting, it was decided by the mission engineers that all three nano-satellites shall correct their initial orbits within approximately 24 h after launch. Initial orbit corrections shall be performed according to the same operation philosophy as for maintaining satellite formation—all four thrusters are operated simultaneously for 3 s once in every lap until the desired orbit is reached.
- (c)
- Attitude control—Each thruster assembly was installed with a 5-deg angle in order to generate body rotation moments when operated individually. In the same manner, the operation of any two adjacent thrusters generates rotation moments. The Adelis-SAMSON nano-satellites can perform attitude control using their reaction wheels and magneto-torquers. Nevertheless, the propulsion system can be used as a backup tool for attitude control if needed.
9. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kulu, E. Nanosatellite & CubeSat Database. 2019. Available online: http://www.nanosats.eu/ (accessed on 27 April 2019).
- You, Z. Space Microsystems and Micro/Nano Satellites, 1st ed.; Butterworth Heinemann: Oxford, UK, 2017; ISBN 13: 978-0128126721. [Google Scholar]
- Gurfil, P.; Herscovitz, P.; Pariente, M. SSC12-VII-2 The SAMSON Project–Cluster Flight and Geolocation with Three Autonomous Nano-satellites. In Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 13–16 August 2012. [Google Scholar]
- Mazal, L.; Pini, G. Closed-Loop Distance-Keeping for Long-Term Satellite Cluster Flight. Acta Astronaut. 2014, 94, 73–82. [Google Scholar] [CrossRef]
- Anis, A. Cold Gas Propulsion System–An Ideal Choice for Remote Sensing Small Satellites. In Remote Sensing–Advanced Techniques and Platforms; Escalante-Ramirez, B., Ed.; IntechOpen: London, UK, 2012. [Google Scholar] [CrossRef]
- Anis, A. Design & Development of Cold Gas Propulsion System for Pakistan Remote Sensing Satellite (PRSS). In 2008 2nd International Conference on Advances in Space Technologies; Curran Associates Inc.: Dutchess County, NY, USA, 2008. [Google Scholar]
- Lemmer, K. Propulsion for CubeSats. Acta Astronaut. 2017, 134, 231–243. [Google Scholar] [CrossRef]
- Adler, S.; Warshavsky, A.; Peretz, A. Low-Cost Cold-Gas Reaction Control System for Sloshsat FLEVO Small Satellite. J. Spacecr. Rocket. 2005, 42, 345–351. [Google Scholar] [CrossRef]
- Lev, D.R.; Herscovitz, J.; Zuckerman, Z. Cold Gas Propulsion System Conceptual Design for the SAMSON NanoSatellite. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference (JPC), Cleveland, OH, USA, 28–30 July 2014. [Google Scholar]
- Lev, D.R.; Herscovitz, J.; Kariv, D.; Mizrachi, I. Heated Gas Propulsion System Conceptual Design for the SAMSON Nano-Satellite. J. Small Satell. 2017, 6, 551–564. [Google Scholar]
- Israel 21C. Israel to Launch Synchronized Satellites into Space. Uncovering Israel. 2018. Available online: https://www.israel21c.org/israel-to-launch-synchronized-satellites-into-space/ (accessed on 8 May 2019).
- NASA. General Environmental Verification Standards (GEVS) for GSFC Flight Programs and Projects; GSFC-STD-7000A; NASA: Washington, DC, USA, 2005.
- Sai Global. Military Standard MIL-STD-1522A (USA), Standard General Requirements for Safe Design and Operation of Pressurized Missile and Space Systems; Dept. of Air Force; Sai Global: Sydney, Australia, 1984. [Google Scholar]
- European Space Standards. ECSS-E-ST-32-11C, Modal Survey Assessment; European Cooperation for Space Standardization: Noordwijk, The Netherlands, 2008. [Google Scholar]
- Turner, M.J. Rocket and Spacecraft Propulsion, 2nd ed.; Springer: Chichester, UK, 2006. [Google Scholar]
- Spisz, E.W.; Brinich, P.F.; Jack, J.R. Thrust Coefficients in Low-Thrust Nozzles; Technical Report# NASA TN D-3056; National Aeronautics and Astronautics Administration (NASA): Washington, DC, USA; Lewis Research Center: Cleveland, OH, USA, 1965.
- O’Gara, M.R. A CFD Investigation of Axisymmetric Microthruster Nozzles for Use on Nano-Satellites. Master’s Thesis, Embrie-Riddle Aeronautical University, Daytona Beach, FL, USA, 2007. [Google Scholar]
- The Lee Company. Solenoid Valves–VHS Series, Datasheet. 2019. Available online: https://www.theleeco.com/products/electro-fluidic-systems/solenoid-valves/dispensing-valves/vhs-series-solenoid-valves/ (accessed on 30 Jul 2019).
- Mazal, L.; Mingotti, G.; Gurfil, P. Optimal On–Off Cooperative Maneuvers for Long-Term Satellite Cluster Flight. J. Guid. Control Dyn. 2014, 37, 391–402. [Google Scholar] [CrossRef]
- Wen, C.; Zhang, H.; Gurfil, P. Orbit Injection Considerations for Cluster Flight of Nanosatellites. J. Spacecr. Rocket. 2015, 52, 196–208. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite/Mission Property | Constraint/Guideline | Remarks |
|---|---|---|
| Itot | >150 N·s | Required total impulse per satellite for a one-year mission |
| mps | <2 kg | Propulsion system mass |
| (including propellant) | ||
| Vps | <100 mm × 100 mm × 210 mm | Propulsion system volume |
| Propellant type | Non-toxic, non-flammable, non-explosive | Student project constraint |
| Electrical power | <10 W | For all operational phases |
| Thrust (20 mN per thruster) | 80 mN (For the entire propulsion system) |
| Component | Mass per Unit (gr) | Quantity per Satellite | Supplier | Remarks |
|---|---|---|---|---|
| Propellant tank | 425 | 1 | Rafael | |
| Krypton propellant | 468 | N/A | Procured | Assuming Isp = 34 s [9] with no propellant contingency |
| Latch valve | 50 | 1 | Marotta Controls | |
| Filter | 38 | 1 | Rafael | Filter element is procured |
| Pressure regulator (high pressure) | 110 | 1 | Rafael | |
| Pressure regulator (low pressure) | 110 | 1 | Rafael | |
| Thruster assembly: Nozzle, Solenoid valve | 16 | 4 | Technion, The LEE Company | Assembly by Rafael |
| High pressure transducer | 28 | 1 | L’Essor Français Electronique (EFE) | |
| Low pressure transducer | 28 | 1 | L’Essor Français Electronique (EFE) | |
| Fill and vent valve | 48 | 1 | Rafael | |
| Tubes, plates, brackets, and fasteners | 592 | N/A | Technion | |
| Overall | 1961 |
| Property | Value | Remarks |
|---|---|---|
| Dry mass | 425 gr | |
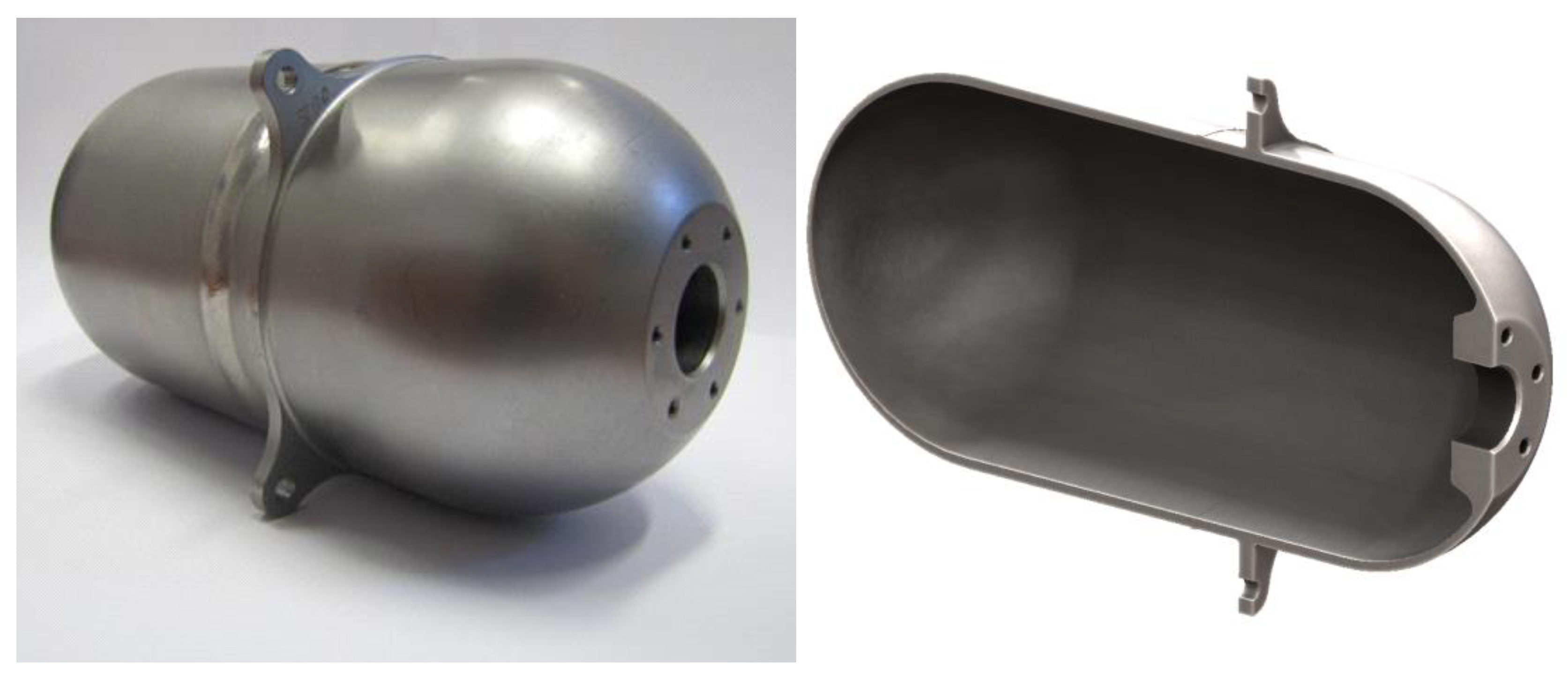
| Material | Ti-6Al-4V | |
| External dimensions: | Capsule-shaped | |
| Length | 170 mm | |
| Diameter | 82 mm | |
| Inner volume | 680 cc | for 468 gr of krypton |
| Maximum Expected Operating Pressure (MEOP) | 160 bar | @34 °C |
| Req. burst pressure | 320 bar | 2×MEOP |
| Check Type | Operation Characteristics | Number of Tests |
|---|---|---|
| Pulse | 0.1 s ON; 0.9 s OFF | 20 |
| Steady state | 5 continuous seconds | 1 |
| Steady state (all valves) | 5 continuous seconds | 1 |
| Relative Satellite Distance | Relative Velocity | Operation |
|---|---|---|
| <1 km | Distance decreasing | Semi-major axis difference increase |
| <1 km | Distance increasing | No action |
| >250 km | Distance decreasing | No action |
| >250 km | Distance increasing | Semi-major axis difference decrease |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaberchik, M.; Lev, D.R.; Edlerman, E.; Kaidar, A. Fabrication and Testing of the Cold Gas Propulsion System Flight Unit for the Adelis-SAMSON Nano-Satellites. Aerospace 2019, 6, 91. https://doi.org/10.3390/aerospace6080091
Zaberchik M, Lev DR, Edlerman E, Kaidar A. Fabrication and Testing of the Cold Gas Propulsion System Flight Unit for the Adelis-SAMSON Nano-Satellites. Aerospace. 2019; 6(8):91. https://doi.org/10.3390/aerospace6080091
Chicago/Turabian StyleZaberchik, Michael, Dan R. Lev, Eviatar Edlerman, and Avner Kaidar. 2019. "Fabrication and Testing of the Cold Gas Propulsion System Flight Unit for the Adelis-SAMSON Nano-Satellites" Aerospace 6, no. 8: 91. https://doi.org/10.3390/aerospace6080091