Implementation and Hardware-In-The-Loop Simulation of a Magnetic Detumbling and Pointing Control Based on Three-Axis Magnetometer Data


Abstract
:1. Introduction
2. Spacecraft Attitude Dynamics and Magnetic Attitude Control
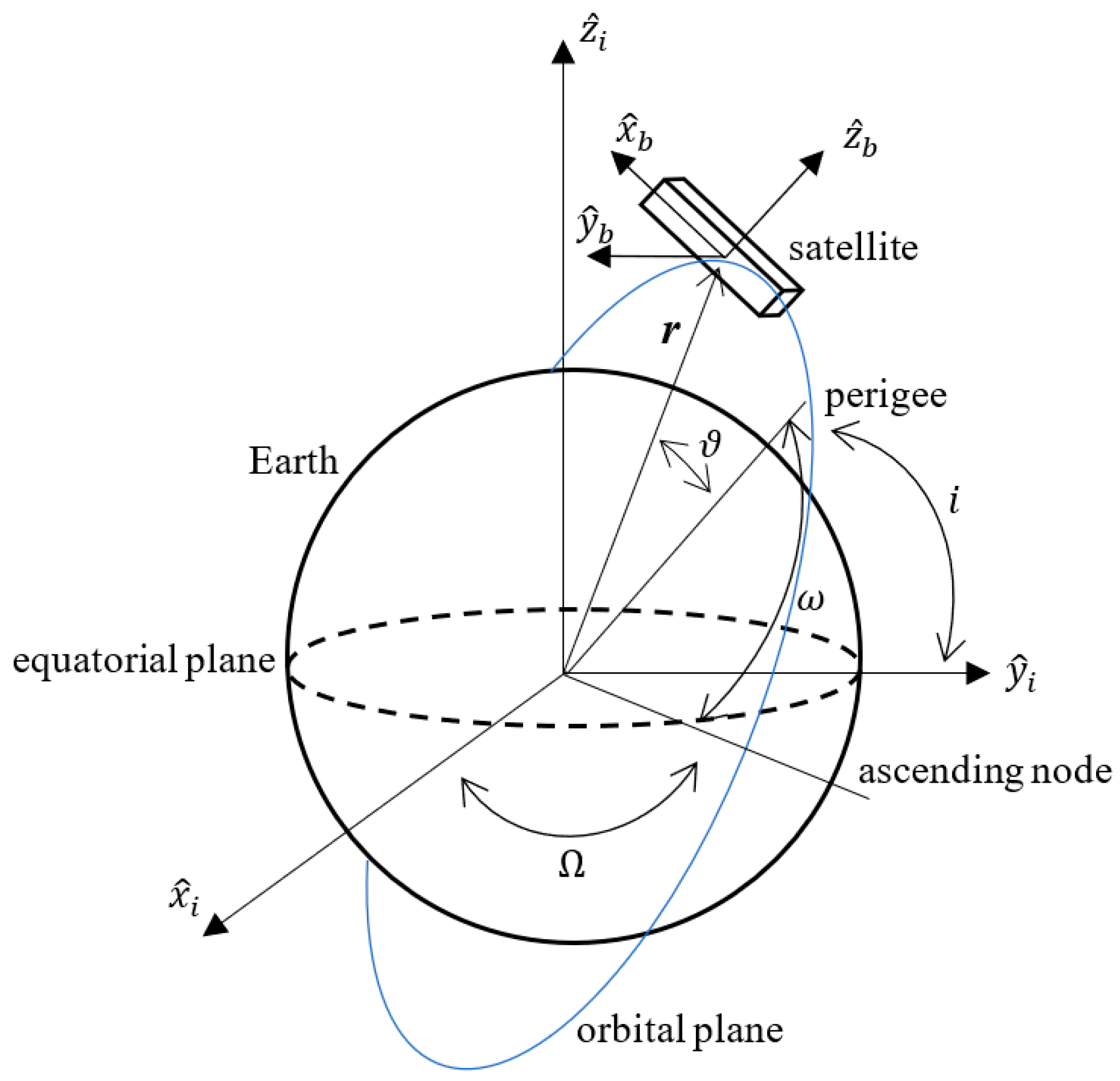
2.1. Attitude Dynamics
2.2. Magnetic Attitude Control
- (a)
- , producing in the direction of Bb;
- (b)
- , setting and to an angle of 45 deg with respect to Bb.
2.3. Disturbance Torques
2.3.1. Residual Dipole Moment Torque
2.3.2. Gravity Gradient Torque
2.3.3. Aerodynamic Torque
3. Configuration of the Hardware-In-The-Loop Simulation Hardware
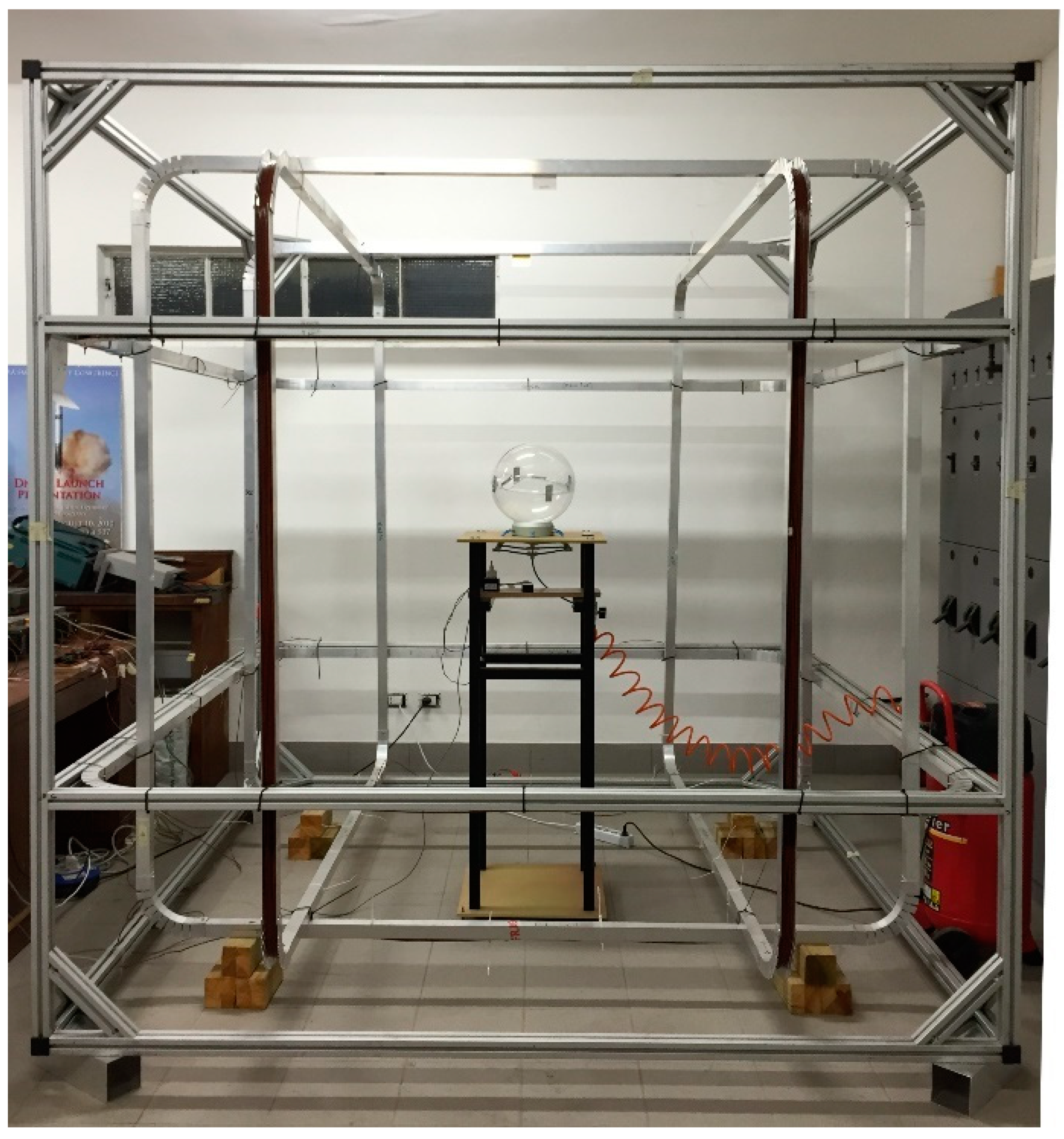
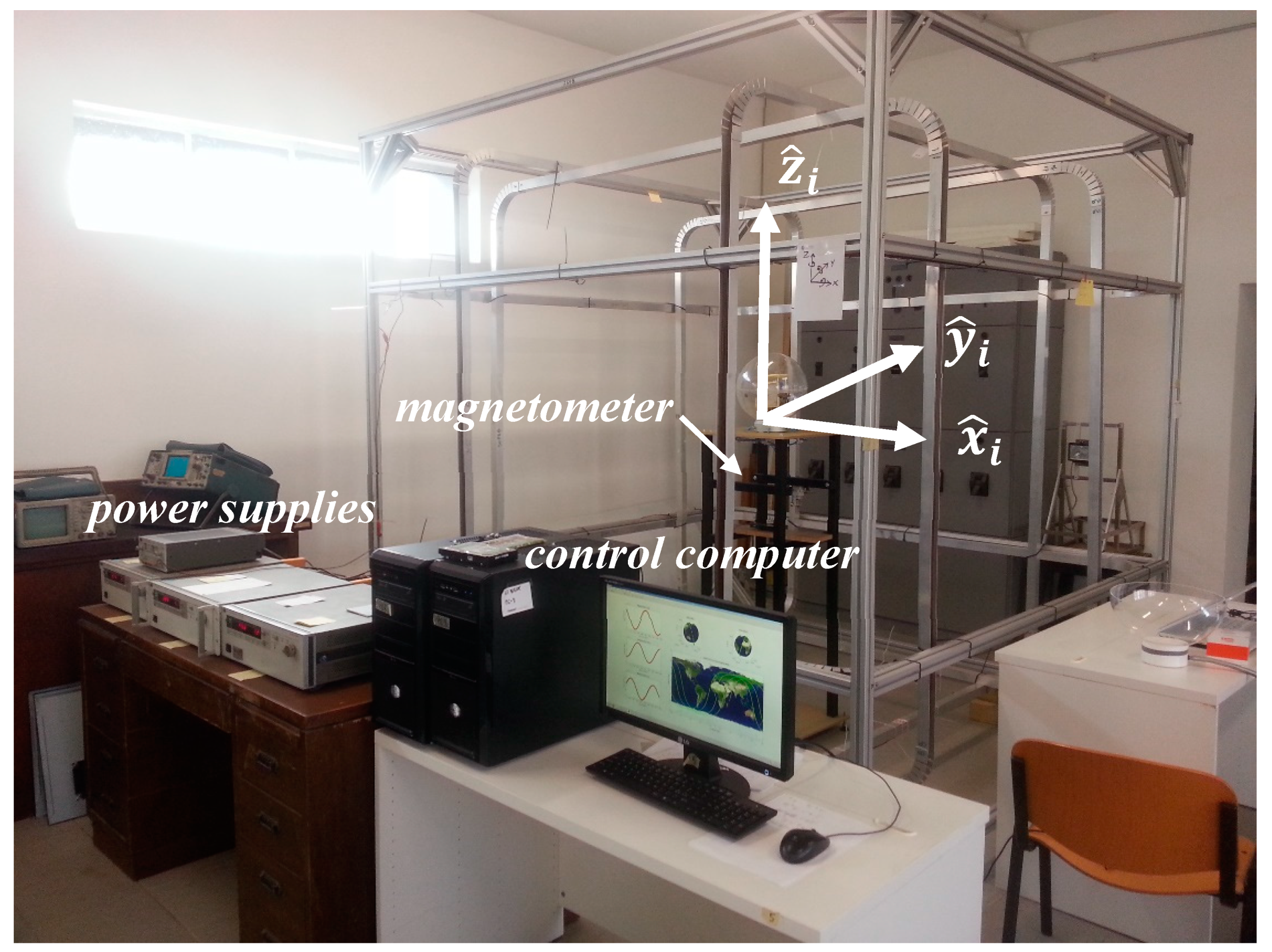
3.1. Helmholtz Cage Configuration
- 3 power supplies, each one feeding one pair of coils, allowing the generation of a magnetic field vector with desired intensity and direction;
- a control computer, on which the orbital motion of the satellite is simulated, based on the input orbital parameters, and the corresponding value of Bi for each position of the satellite is calculated in real-time, using the International Geomagnetic Reference Field (IGRF) model [38];
- a calibrated three-axis magnetometer, measuring the magnetic field in the central and constant region of the Helmholtz cage.
- the orbital propagator updates the true anomaly and calculates the position r of the satellite in according to Equations (11)–(13);
- using a Matlab routine, the longitude (Lo), latitude (La), and altitude (h) of the satellite at any r are calculated and the geomagnetic field Bi is computed from the IGRF model:where VB is the geomagnetic field scalar potential, reported below, whose parameters are defined in [38]:
- the value of the current to be provided to each pair of coils of the Helmholtz cage is calculated based on Equation (19);
- the power supplies are activated from Matlab script, changing the magnetic field inside the cage, which is measured by the facility magnetometer Bm;
- the reading from the magnetometer is sent to the control computer and the error between the desired and the measured value of the magnetic field is calculated, ;
- based on a PID controller implemented in the code estimates the currents Ic_i to compensate the error;
- the loop repeats until the end of the simulation.
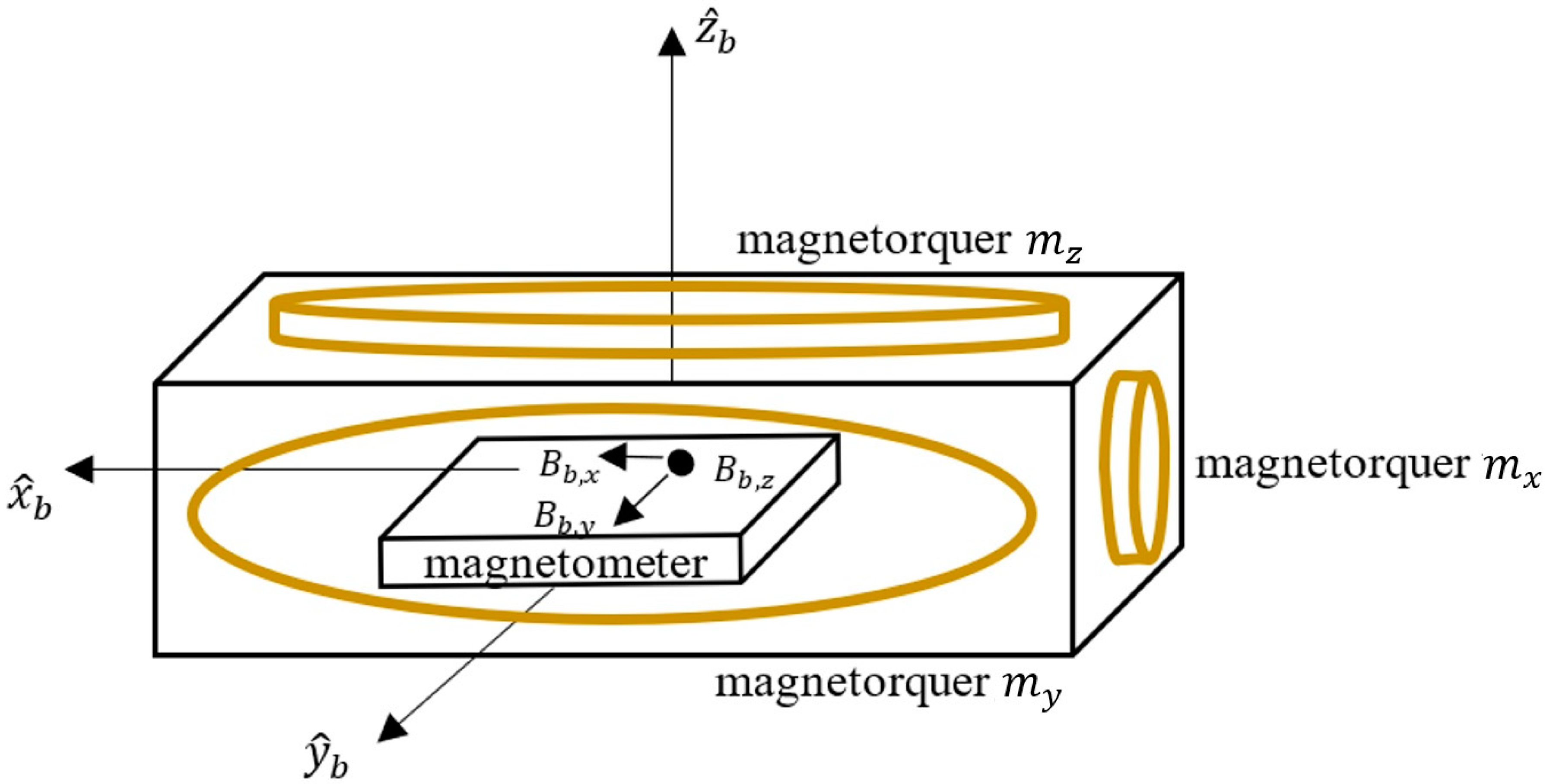
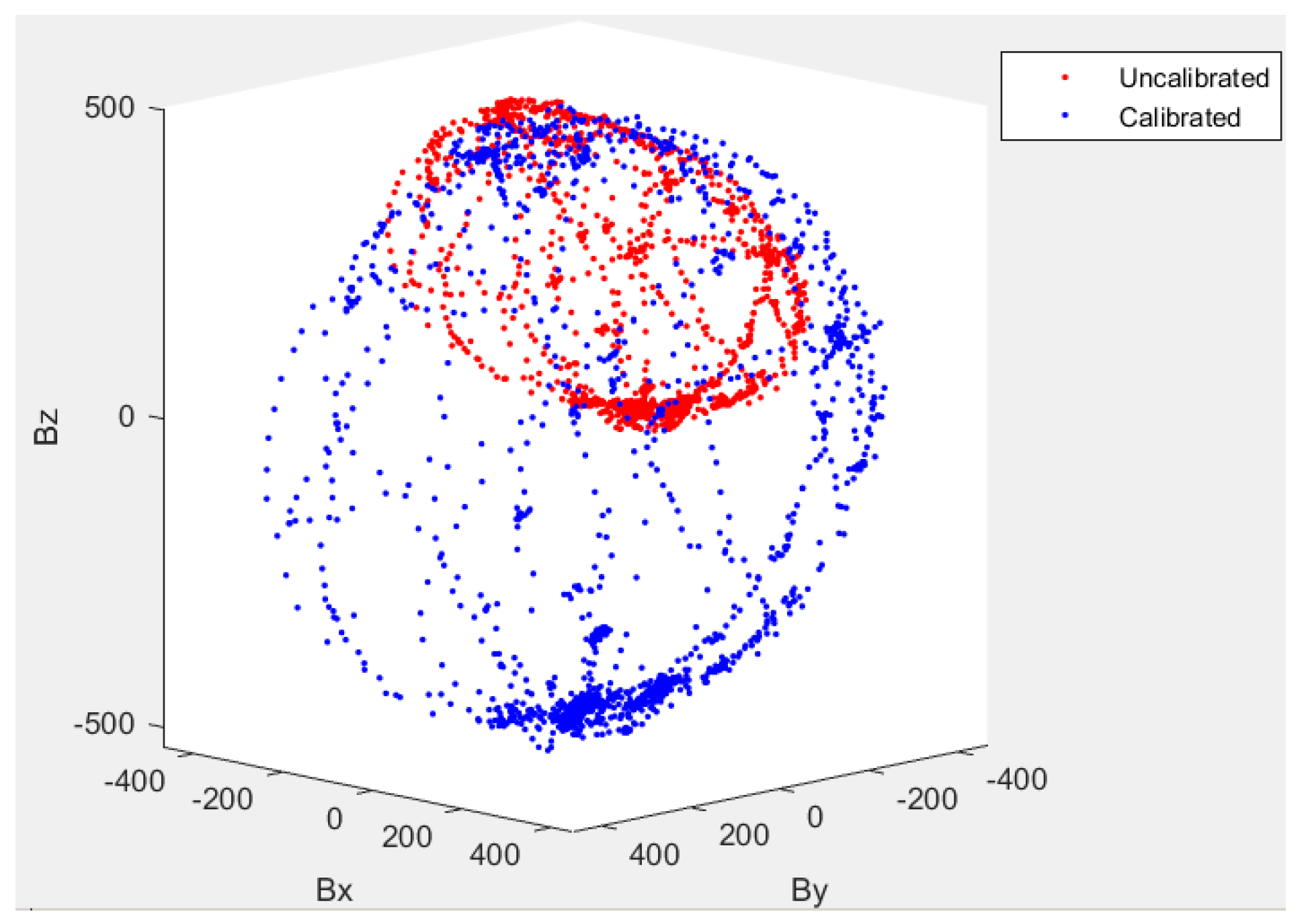
3.2. On-Board Magnetometer Configuration and Calibration
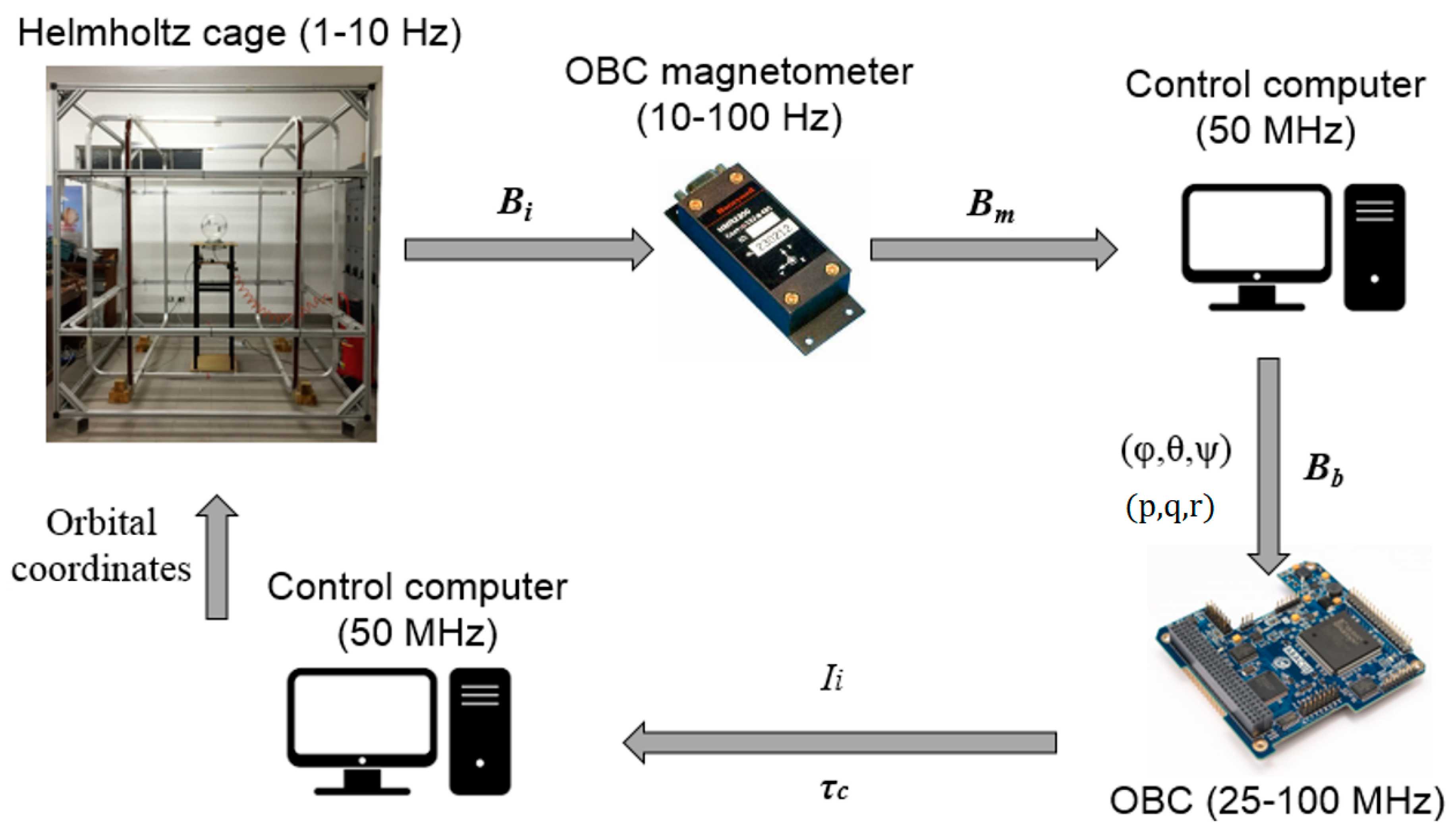
3.3. Hardware-In-The-Loop Platform Configuration
- Helmholtz cage system, generating Bi based on the estimates of the orbital propagator running on the facility control computer;
- on-board three-axis magnetometer (integrated to the OBC), measuring the magnetic field generated by the Helmholtz cage;
- OBC, on which the control algorithms are implemented, producing the driving current to the magnetorquer and the magnetic control torque;
- control computer, propagating the orbital motion to calculate Bi, calculating the disturbance torques, and integrating the attitude dynamics equations to determine the Euler angles and angular rates.
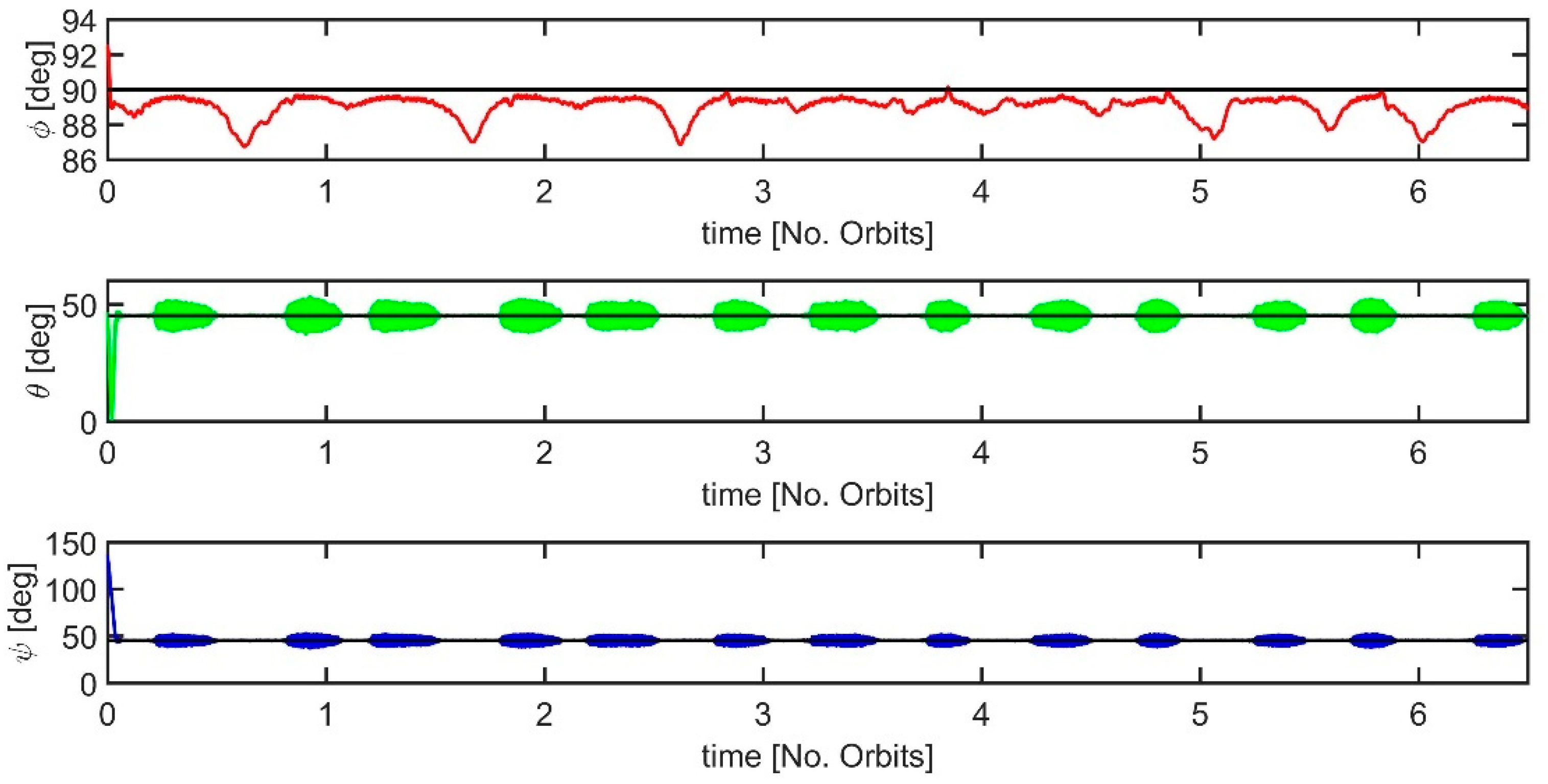
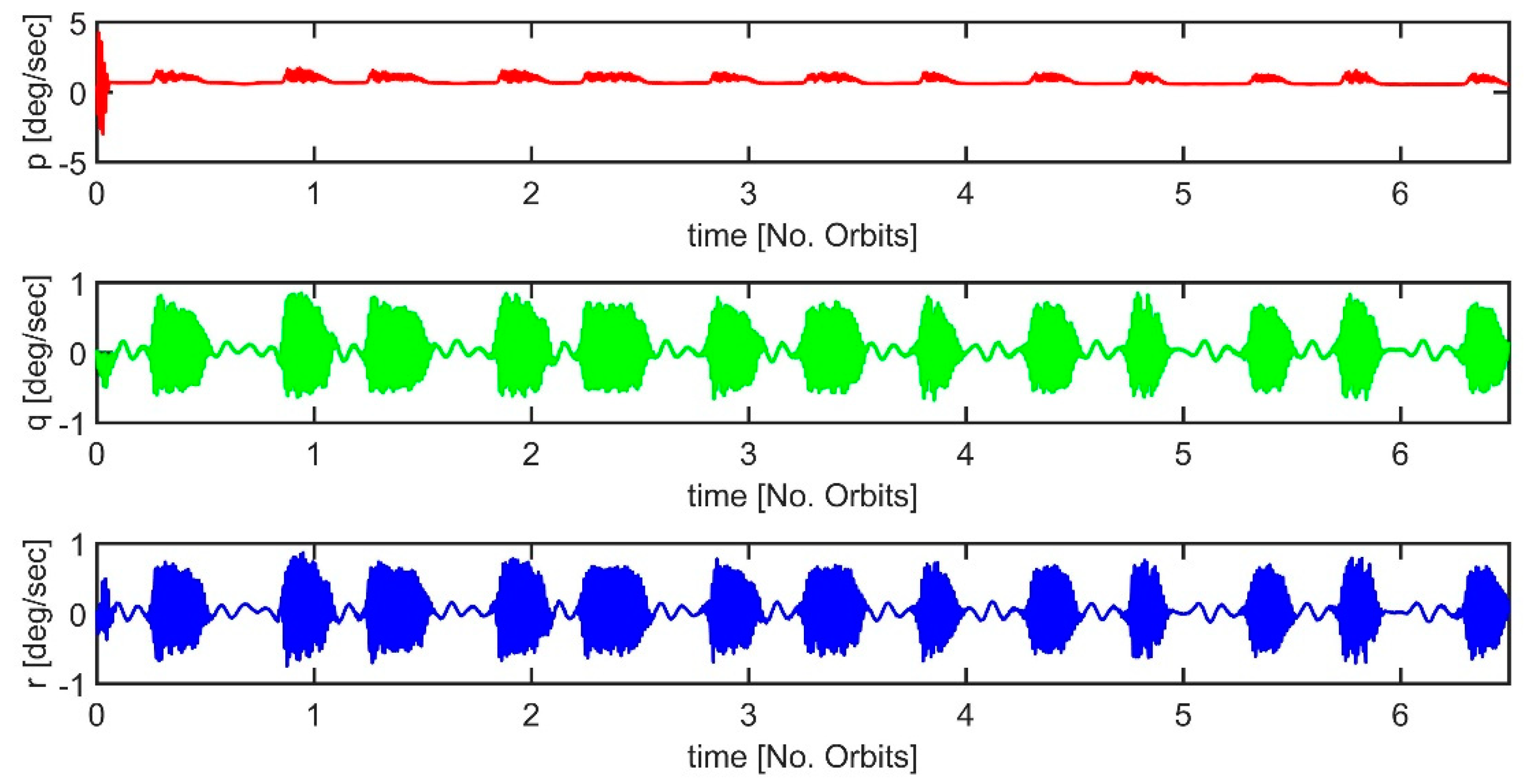
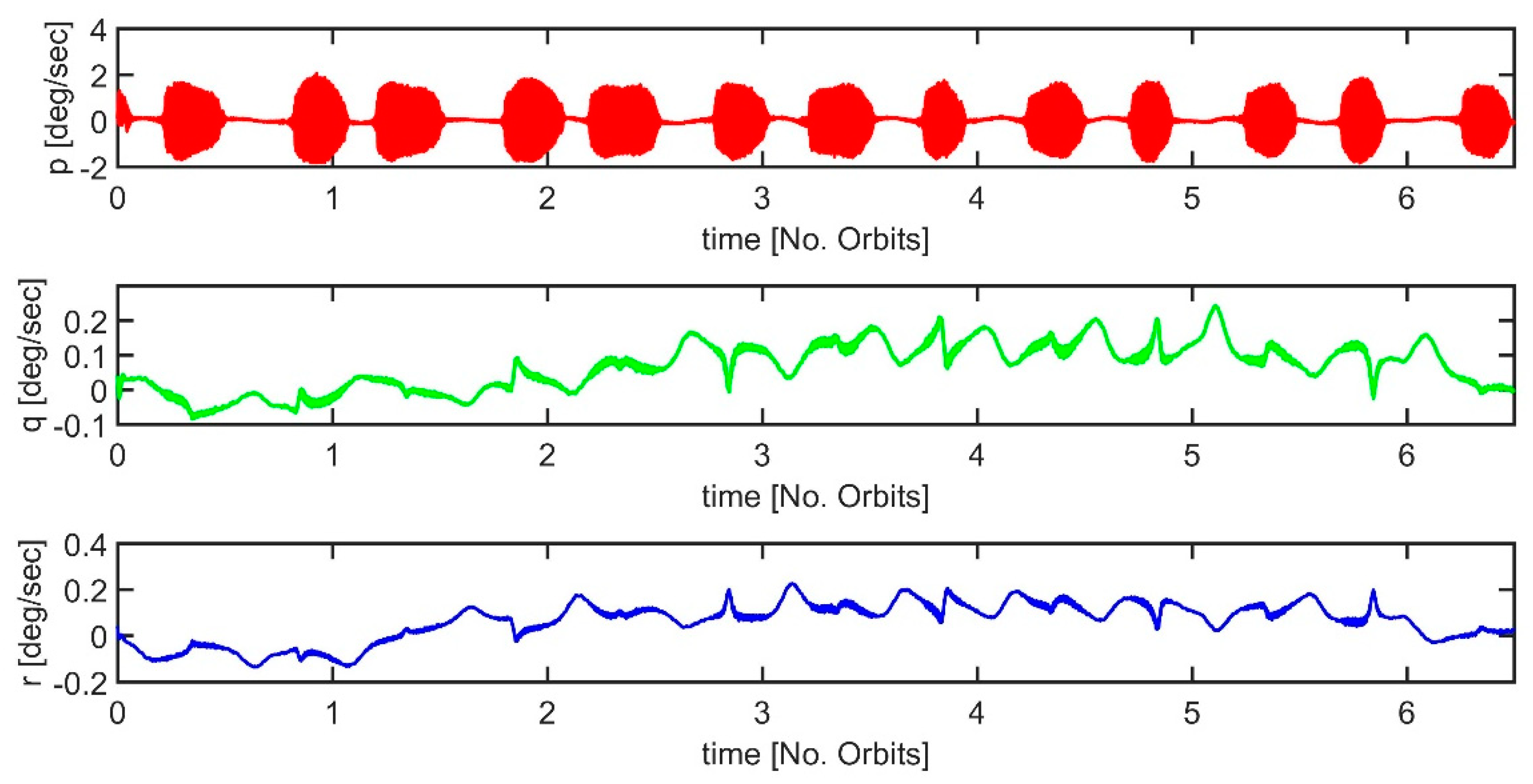
4. Hardware-In-The-Loop Simulations
5. Discussion
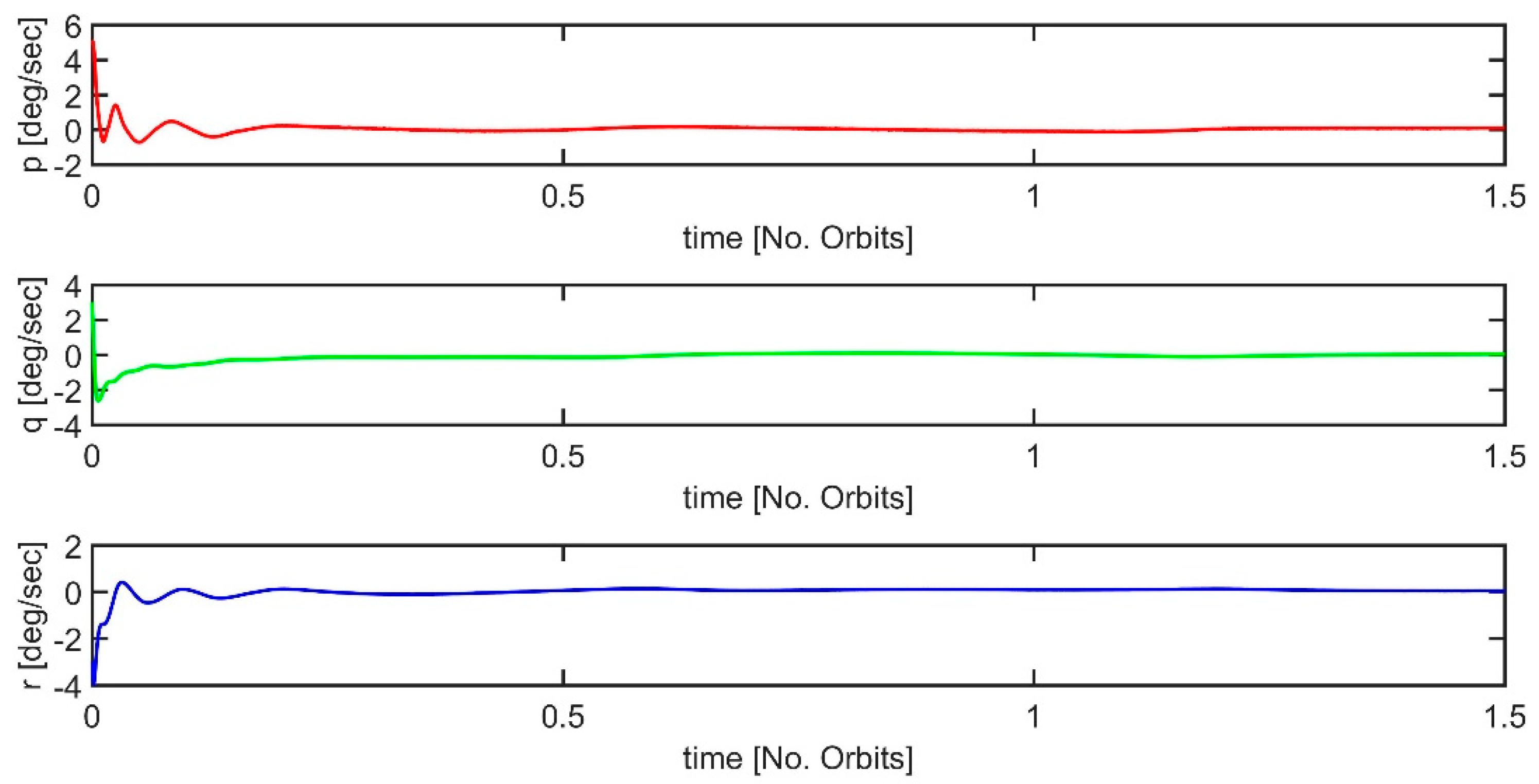
- the system can produce effective detumbling and stabilization during the pointing phase;
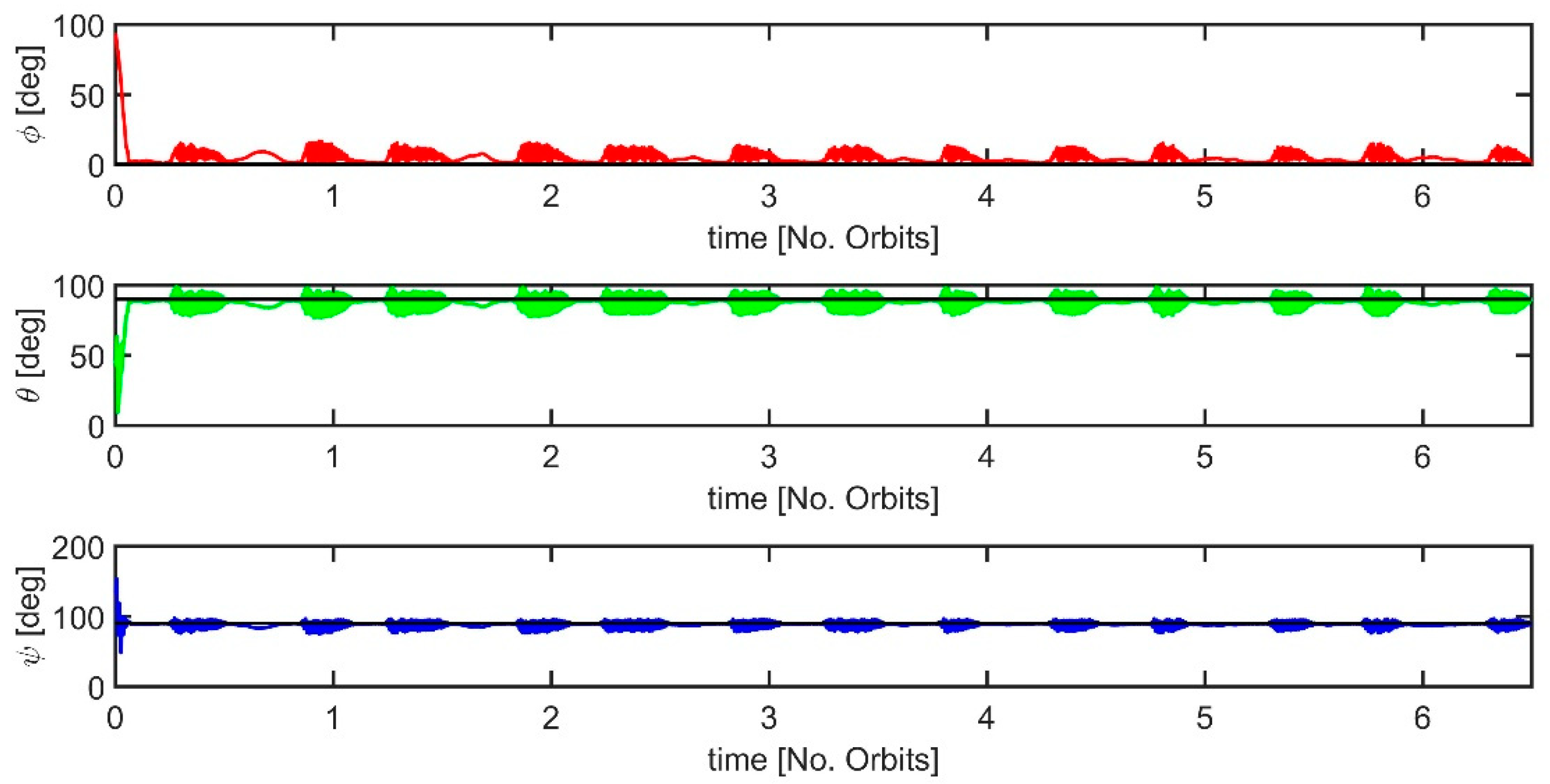
- the pointing accuracy of the system, though coarse, is acceptable for a backup mode of operations, and considering the lack of attitude information or sophisticate filtering methods (i.e., Extended Kalman Filter);
- the achievement of some target attitude can be more challenging, or equivalently less accurate, this is in particular the case for ;
- the system is robust with respect to the noise of the calibrated magnetometer (±1 × 10−6 T) and the perturbation induced by residual dipole moment, gravity gradient and aerodynamic torques.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Swantwout, M. The First One Hundred CubeSats: A Statistical Look. J. Small Satel. 2013, 2, 213–233. [Google Scholar]
- Wenschel, L.; Brown, J.; Toorian, A.; Coelbo, R.; Puig-Suari, J.; Twiggs, R. CubeSat Development in Education and into Industry. In Proceedings of the AIAA Space 2006 Conference, San Jose, CA, USA, 19 September 2006. [Google Scholar]
- Langer, M.; Bouwmeester, J. Reliability of CubeSats–Statistical Data, Developers’ Beliefs and the Way Forward. In Proceedings of the AIAA/USU Conference on Small Satellites, SSC16-X-2, Logan, UT, USA, 6–11 August 2016. [Google Scholar]
- Shou, H.-N. Microsatellite Attitude Determination and Control Subsystem Design and Implementation: Software-in-the-Loop Approach. In Proceedings of the 2014 International Symposium on Computer, Consumer and Control, Taichung, Taiwan, 10–12 June 2014. [Google Scholar]
- Stesina, F.; Corpino, S.; Feruglio, L. An In-The-Loop Simulator for the Verification of Small Space Platforms. Int. Rev. Aerosp. Eng. 2017, 10, 50–60. [Google Scholar] [CrossRef]
- Wegner, S.; Majd, E.; Taylor, L.; Thomas, R.; Egziabher, D.G. Methodology for Software-in-the-Loop Testing of Low-Cost Attitude Determination Systems, SSC17-WK-09. Available online: https://digitalcommons.usu.edu/smallsat/2017/all2017/5/ (accessed on 30 November 2019).
- Klesh, A.; Seagraves, S.; Bennet, M.; Boone, D.; Cutler, J.; Bahcivan, H. Dynamically driven Helmholtz cage for experimental magnetic attitude determination. Adv. Astronaut. Sci. 2010, 135, 147–160. [Google Scholar]
- Quadrino, M.K.S. Testing the Attitude Determination and Control of a CubeSat with Hardware-in-the-Loop. Master’s Thesis, Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, Cambridge, MA, USA, 2014. [Google Scholar]
- Poppenk, F.M.; Amini, R.; Brouwer, G.F. Design and application of Helmholtz cage for testing nano-satellites. In Proceedings of the 6th International Symposium on Environmental Testing for Space Programmes, ESA Communication Production Office, Noordwijk, The Netherlands, 12–14 June 2007. [Google Scholar]
- Delabie, T.; Vandoren, B.; De Munter, W.; Raskin, G.; Vandenbussche, B.; Vandepitte, D. Testing and calibrating an advanced cubesat attitude determination and control system. In Proceedings of the Volume 10698, Space Telescopes and Instrumentation 2018: Optical, Infrared, and Millimeter Wave, SPIE Astronomical Telescopes and Instrumentation, Austin, TX, USA, 10–15 June 2018. [Google Scholar]
- Gavrilovich, I.; Krut, S.; Gouttefarde, M.; Pierrot, F.; Dusseau, L. Test Bench for Nanosatellite Attitude Determination and Control System Ground Tests. In Proceedings of the 4S Symposium, Small Satellites Systems and Services 2014, Petro, Spain, 4–8 June 2014. [Google Scholar]
- Schwartz, J.L.; Peck, M.A.; Halt, C.D. Historical Review of Air-Bearing Spacecraft Simulators. J. Guid. Control Dyn. 2003, 26, 513–522. [Google Scholar] [CrossRef] [Green Version]
- Chesi, S.; Perez, O.; Romano, M. A Dynamic, Hardware-in-the-Loop, Three-Axis Simulator of Spacecraft Attitude Maneuvering with Nanosatellite Dimensions. J. Small Satell. 2015, 4, 315–328. [Google Scholar]
- Kuyyakanont, A.; Kuntanapreeda, S.; Fuengwarodsakul, H. On verifying magnetic dipole moment of a magnetic torquer by experiments. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Krasnoyarsk, Russia, 8 November 2018; Volume 297. [Google Scholar]
- Lee, D.Y.; Park, H.; Romano, M.; Cutler, J. Development and Experimental Validation of a Multi-Algorithmic Hybrid Attitude Determination and Control System for a Small Satellite. Aerosp. Sci. Technol. 2018, 78, 494–509. [Google Scholar] [CrossRef]
- Ousaloo, H.S.; Nodeh, M.T.; Mehrabian, R. Verification of Spin Magnetic Attitude Control System using air-bearing-based attitude control simulator. Acta Astronaut. 2016, 126, 546–553. [Google Scholar] [CrossRef]
- Sternberg, D.C.; Pong, C.; Filipe, N.; Mohan, S.; Johnson, S.; Wilson, L.J. Jet Propulsion Laboratory Small Satellite Dynamics Testbed Simulation: On-Orbit Performance Model Validation. J. Spacecr. Rocket. 2018, 55, 322–334. [Google Scholar] [CrossRef]
- Tapsawat, W.; Sangpet, T.; Kuntanapreeda, S. Development of a hardware-in-loop attitude control simulator for a CubeSat satellite. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Krasnoyarsk, Krasnoyarsk, Russia, 8 November 2018; Volume 297. [Google Scholar]
- Nascetti, A.; Pancorbo-D’Ammando, D.; Truglio, M. Abacus advanced board for active control of university satellites. In Proceedings of the 2nd IAA Conference on University Satellite Missions and Cubesat Workshop, International Academy of Astronautics, Roma, Italy, 3–9 February 2013. [Google Scholar]
- Wertz, J.R. (Ed.) Spacecraft Attitude Determination and Control, 3rd ed.; Kluwer Academic Publisher: Dordrecht, The Netherlands, 1978. [Google Scholar]
- de Ruiter, A.H.; Damaren, C.; Forbes, J.R. Spacecraft Dynamics and Control: An Introduction, 1st ed.; John Wiley & Sons. Ltd.: Chichester, UK, 2013. [Google Scholar]
- Teofilatto, P.; Testani, P.; Celani, F.; Nascetti, A.; Truglio, M. A nadir-pointing magnetic attitude control system for TigriSat nanosatellite. In Proceedings of the International Astronautical Congress 2013, Beijing, China, 23–27 September 2013; Volume 6, pp. 4818–4829. [Google Scholar]
- Natanson, G.A.; McLaughlin, S.F.; Nicklas, R.C. A method of determining attitude from magnetometer data only. In Proceedings of the NASA Goddard Space Flight Center, Flight Mechanics/Estimation Theory Symposium, Silver Spring, MD, USA, 1 December 1990; pp. 359–380. [Google Scholar]
- Natanson, G.A.; Challa, J.; Deutschmann, J.; Baker, D.F. Magnetometer only attitude and rate determination for a gyro-less spacecraft. In Proceedings of the Third International Symposium on Space Mission Operations and Ground Data Systems, Greenbelt, MD, USA, 1 November 1994; pp. 791–798. [Google Scholar]
- Ma, H.; Xu, S. Magnetomter-only attitude and angular velocity filtering estimation for attitude changing spacecraft. Acta Astronaut. 2014, 102, 89–102. [Google Scholar] [CrossRef]
- Psiaki, M.L. Global Magnetomter-Based Spacecraft Attitude and Rate Estimation. J. Guid. Control Dyn. 2004, 27, 240–250. [Google Scholar] [CrossRef]
- Hart, C. Satellite Attitude Determination Using Magnetometer Data Only. In Proceedings of the AIAA Aerospace Science Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–9 January 2009. [Google Scholar]
- Sugimura, N.; Kuwahara, T.; Yoshida, K. Attitude Determination and Control System for Nadir Pointing Using Magnetorquer and Magnetometer. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016. [Google Scholar]
- Ma, G.F.; Jiang, X.Y. Unscented Kalman filter for spacecraft attitude estimation and calibration using magnetometer measurements. In Proceedings of the 2005 International Conference on Machine Learning and Cybernetics, Guangzhou, China, 18–21 August 2015. [Google Scholar]
- Searcy, J.D.; Pernicka, H.J. Magnetometer-Only Attitude Determination Using Novel Two-Step Kalman Filter Approach. J. Guid. Control Dyn. 2012, 35, 1639–1701. [Google Scholar] [CrossRef]
- Carletta, S.; Teofilatto, P. Design and Numerical Validation of an Algorithm for the Detumbling and Angular Rate Determination of a CubeSat Using Only Three-Axis Magnetometer Data. Int. J. Aerosp. Eng. 2018. [Google Scholar] [CrossRef]
- Lassakeur, A.; Underwood, C.; Taylor, B. Enhanced Attitude Stability and Control for CubeSats by Real-Time On-Orbit Determination of Their Dynamic Magnetic Moment. In Proceedings of the 69th International Astronautical Congress, Bremen, Germany, 1–5 October 2018. [Google Scholar]
- Springmann, J.C.; Cutler, J.W. Magnetic Sensor Calibration and Residual Dipole Characterization for Application to Nanosatellites. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Toronto, OT, Canada, 2–5 August 2010. AIAA-20110-7518. [Google Scholar]
- Armstrong, J.; Casey, C.; Creamer, G.; Dutchover, G. Pointing Control for Low Altitude Triple CubeSat Space Darts. In Proceedings of the 23rd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 10–13 August 2009. [Google Scholar]
- NASA SP-8058, Spacecraft Aerodynamic Torques; NASA: Washington, DC, USA, January 1971.
- Picone, J.M.; Hedin, A.E.; Drob, D.P.; Aikin, A.C. NRLMSISE-00 empirical model of the atmosphere: Statistical comparisons and scientific issues. J. Geophys. Res. Space Phys. 2002, 107, A12. [Google Scholar] [CrossRef]
- Reynerson, C. Aerodynamic Disturbance Force and Torque Estimation for Spacecraft and Simple Shapes Using Finite Plate Elements—Part I: Drag Coefficient. Adv. Spacecr. Technol. 2011, 128. [Google Scholar] [CrossRef] [Green Version]
- Thébault, E.; Finlay, C.C.; Beggan, C.D.; Alken, P.; Aubert, J.; Barrois, O.; Bertrand, F.; Bondar, T.; Boness, A.; Brocco, L.; et al. International Geomagnetic Reference Field: The 12th generation. EarthPlanets Space 2015, 67. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbital Parameters | Aerodynamic Properties | ||
| h [km] | 600 | CD | 2.2 |
| i [deg] | 97.79 | lx [m] | 1 × 10−1 |
| e | 0 | ly [m] | 3.3 × 10−1 |
| Ω [deg] | 45 | lz [m] | 3.3 × 10−1 |
| Inertial Properties | Residual Dipole Moment | ||
| m [kg] | 4 | [Am2] | 0.1 |
| Jx [kgm2] | 6.5 × 10−3 | [Am2] | 9.13 × 10−2 |
| Jy [kgm2] | 4.09 × 10−2 | [Am2] | 6.32 × 10−2 |
| Jz [kgm2] | 4.09 × 10−2 | [Am2] | 9.80 × 10−3 |
| Geometric Properties | Magnetorquers Properties | ||
| Ax [m2] | 1 × 10−2 | N | 400 |
| Ay [m2] | 3.3 × 10−2 | A [m2] | 9.03 × 10−3 |
| Az [m2] | 3.3 × 10−2 | Imax [A] | 8.3 × 10−3 |
| Parameter | TC1 | TC2 | TC3 |
|---|---|---|---|
| φ, θ, ψ [deg] | 0, 0, 0 | 175.3, −1.4, 51.7 | 175.3, −1.4, 51.7 |
| ω [deg/sec] | [5 3 −3] | [8.5 4.1 4.2]/100 | [8.5 4.1 4.2]/100 |
| Kd | 1000 | 300 | 500 |
| Kp | 0 | 25 | 30 |
| Error | TC2 | TC3 |
|---|---|---|
| 0.02 | −3.25 | |
| 16.67 | 0.15 | |
| 4.76 | −1.95 | |
| −13.26 | −7.68 | |
| 8.92 | 8.07 | |
| −2.03 | 0.02 | |
| −15.73 | −8.06 | |
| 7.28 | 7.68 | |
| −2.29 | 0.01 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farissi, M.S.; Carletta, S.; Nascetti, A.; Teofilatto, P. Implementation and Hardware-In-The-Loop Simulation of a Magnetic Detumbling and Pointing Control Based on Three-Axis Magnetometer Data. Aerospace 2019, 6, 133. https://doi.org/10.3390/aerospace6120133
Farissi MS, Carletta S, Nascetti A, Teofilatto P. Implementation and Hardware-In-The-Loop Simulation of a Magnetic Detumbling and Pointing Control Based on Three-Axis Magnetometer Data. Aerospace. 2019; 6(12):133. https://doi.org/10.3390/aerospace6120133
Chicago/Turabian StyleFarissi, M. Salim, Stefano Carletta, Augusto Nascetti, and Paolo Teofilatto. 2019. "Implementation and Hardware-In-The-Loop Simulation of a Magnetic Detumbling and Pointing Control Based on Three-Axis Magnetometer Data" Aerospace 6, no. 12: 133. https://doi.org/10.3390/aerospace6120133