
A Study on the Design and Implementation Technologies of EVA at the China Space Station

Abstract
:1. Introduction
2. In-Orbit Applications of EVA in the Low-Earth Orbit
- (a)
- Installation and removal of equipment from the space station (nearly 55%);
- (b)
- Inspection and repair of the space station (nearly 24%);
- (c)
- Scientific or technical experiments;
- (d)
- Testing of manned maneuvering units and new-type extracurricular spacesuits.
- (a)
- Build large, longer sections;
- (b)
- Solve emergencies;
- (c)
- Repair solar arrays;
- (d)
- Conduct EVA to release microsatellites;
- (e)
- Repair manipulators;
- (f)
- Repair the heat insulation layers of the spacecraft;
- (g)
- Install and maintain the scientific loads;
- (h)
- Test the drive device of new-type spacesuits.
3. Extravehicular Missions of the China Space Station
- (a)
- Assembly of a large structure for the space station;
- (b)
- Maintenance and repair of extravehicular equipment;
- (c)
- Astronaut-involved extravehicular scientific experiments;
- (d)
- Inspection conducted by astronauts on extravehicular conditions;
- (e)
- Verification of EVA technologies.
4. Systematic Schemes for EVA in the China Space Station
- (1)
- The overall design method of the extravehicular system based on the integrated design of the airlock module and the universal design of different tasks outside the module was proposed to achieve excellent coupling by integrating multiple modules, multiple tasks, diverse working modes, and multi-systems in the space station and to realize the first in-orbit application of gas recycling technology in the field of manned spaceflight in China.
- (2)
- For the first time in China, a ground verification system for the whole process of extravehicular missions has been established, including system-level three-dimensional man-suit-module simulation verification, layout verification for passing the airlock under the compact space constraint in the spacecraft, safety verification of the whole process of extravehicular missions, low-pressure environment verification, operability verification under the microgravity environment, etc. It has solved a series of problems, such as spatial constraints, support constraints, the large difference between space and the Earth, and high safety requirements for astronauts on extravehicular missions.
- (3)
- A fast transfer method combining the transfer of astronauts by manipulators and the autonomous transfer of astronauts was proposed to solve the three major problems of large-scale transfer of astronauts across modules, fixing at working points, and transfer of maintenance equipment under the given time constraints of multi-module and multi-task extravehicular working points.
- (4)
- The load requirements of the auxiliary device applicable to the requirements of China’s extravehicular service interface were formulated to meet the load bearing requirements of the module body and auxiliary device during the astronaut’s transfer process, the load’s operation process, and the pressure relief/recovery process, as well as the operating force requirements of the operating equipment. It was ensured that the astronaut could operate the equipment properly by using the force exerted by the extravehicular spacesuit.
4.1. System Design of Airlock Modules
4.1.1. Opening Force for the Door of the Airlock Module
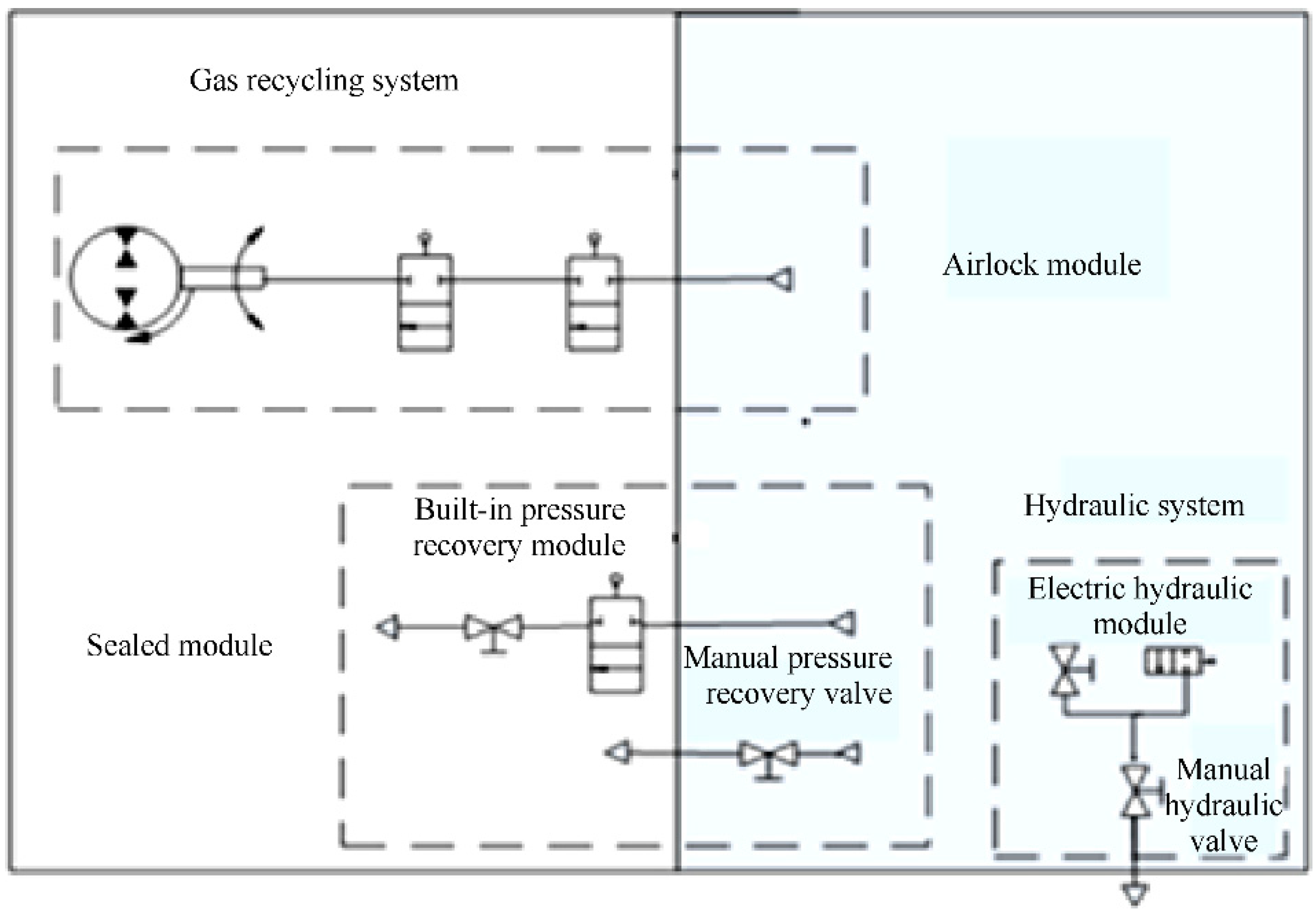
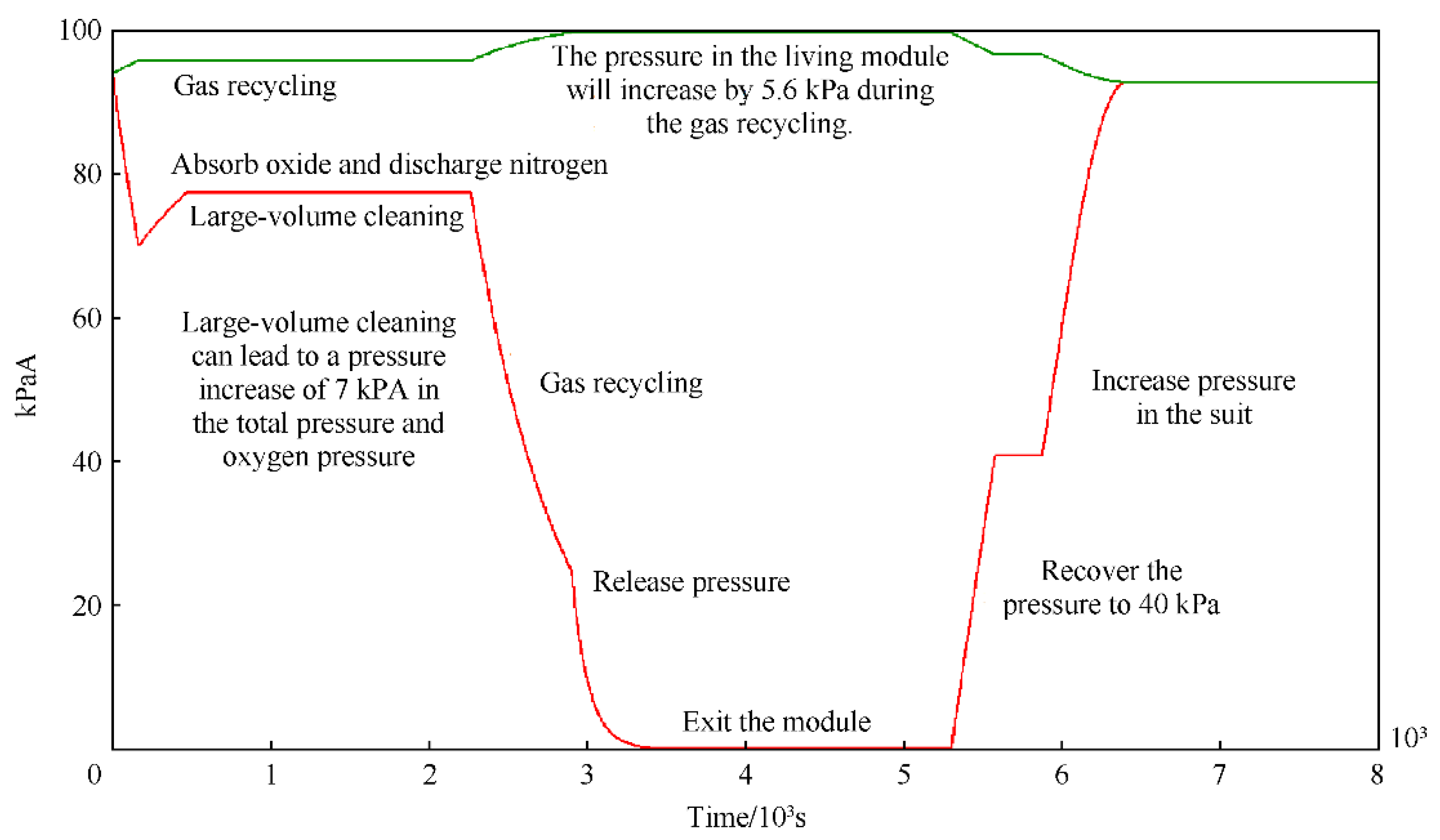
4.1.2. Pressure Relief/Recovery System
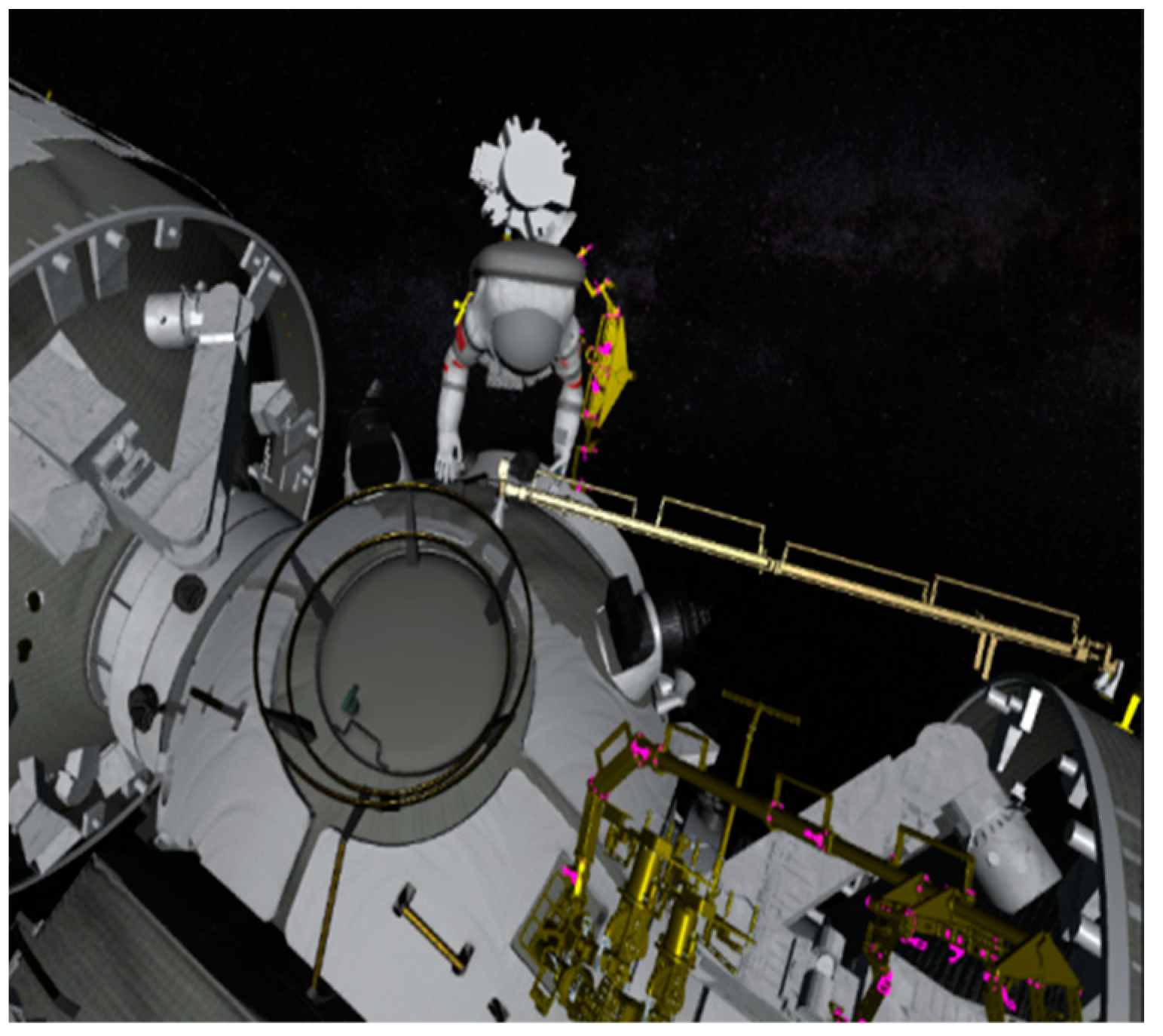
4.2. Extravehicular Transfer Technologies for Astronauts
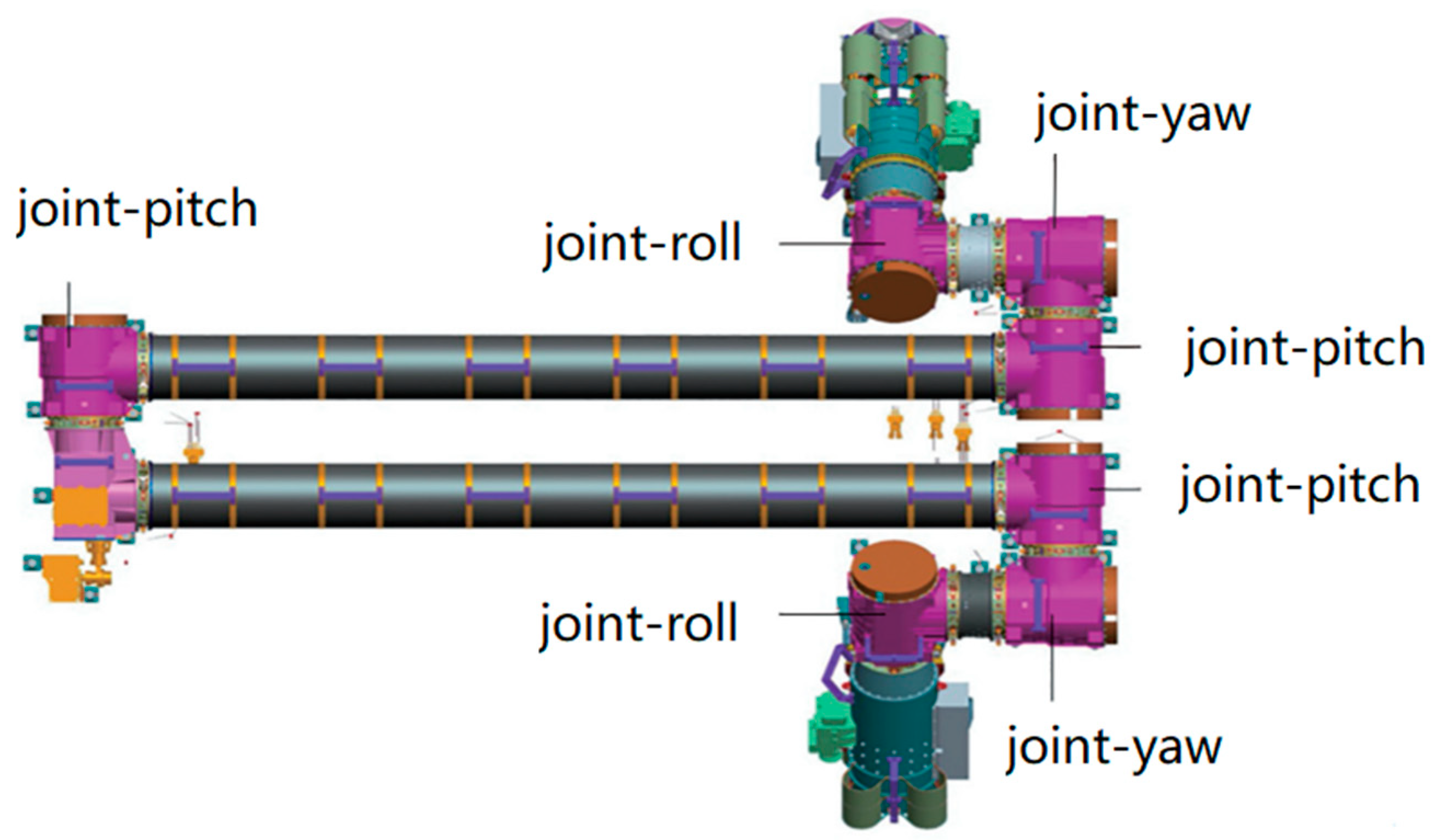
4.2.1. Manipulator-Supported Transfer and Operation
4.2.2. Autonomous Transfer and Operation
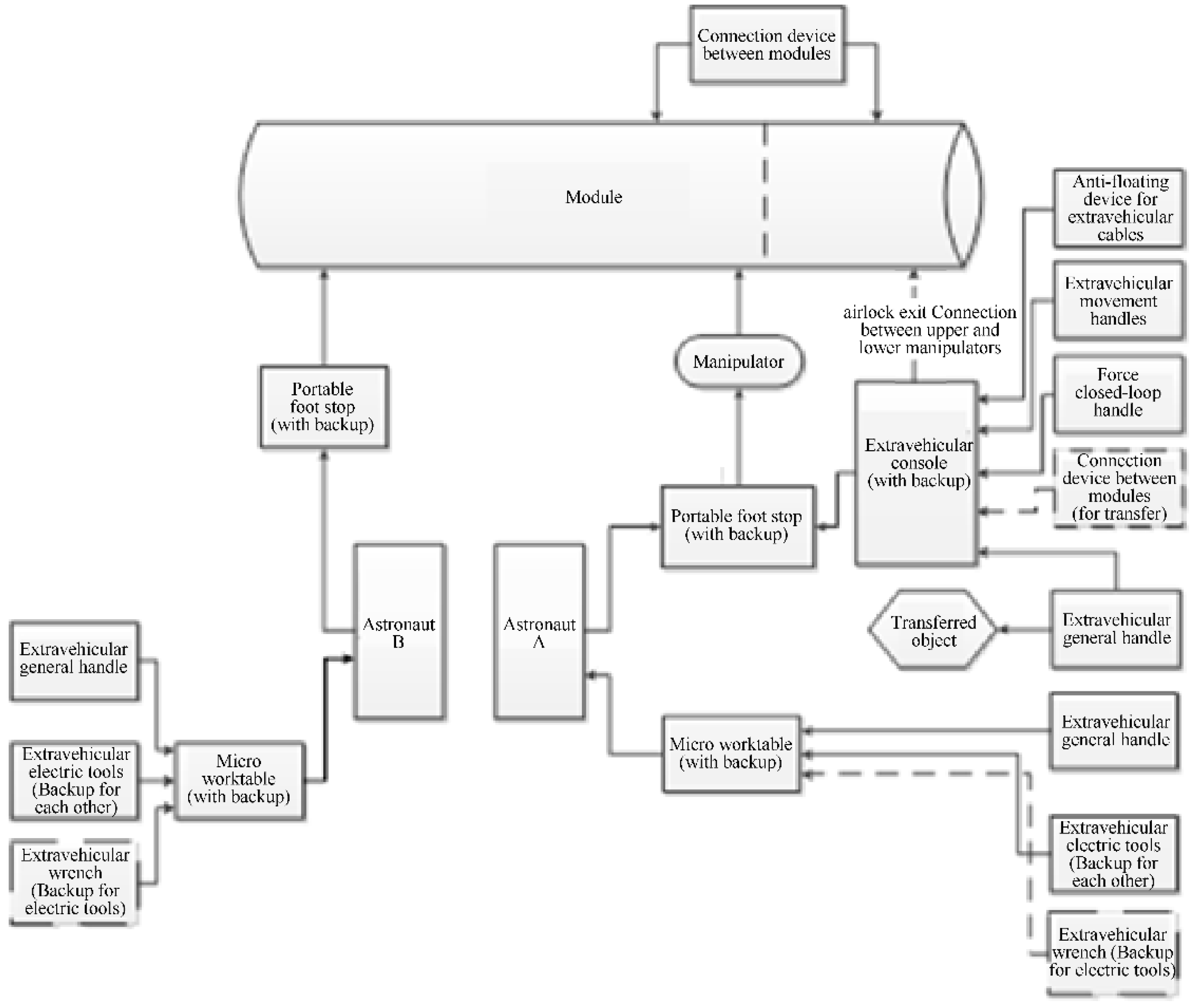
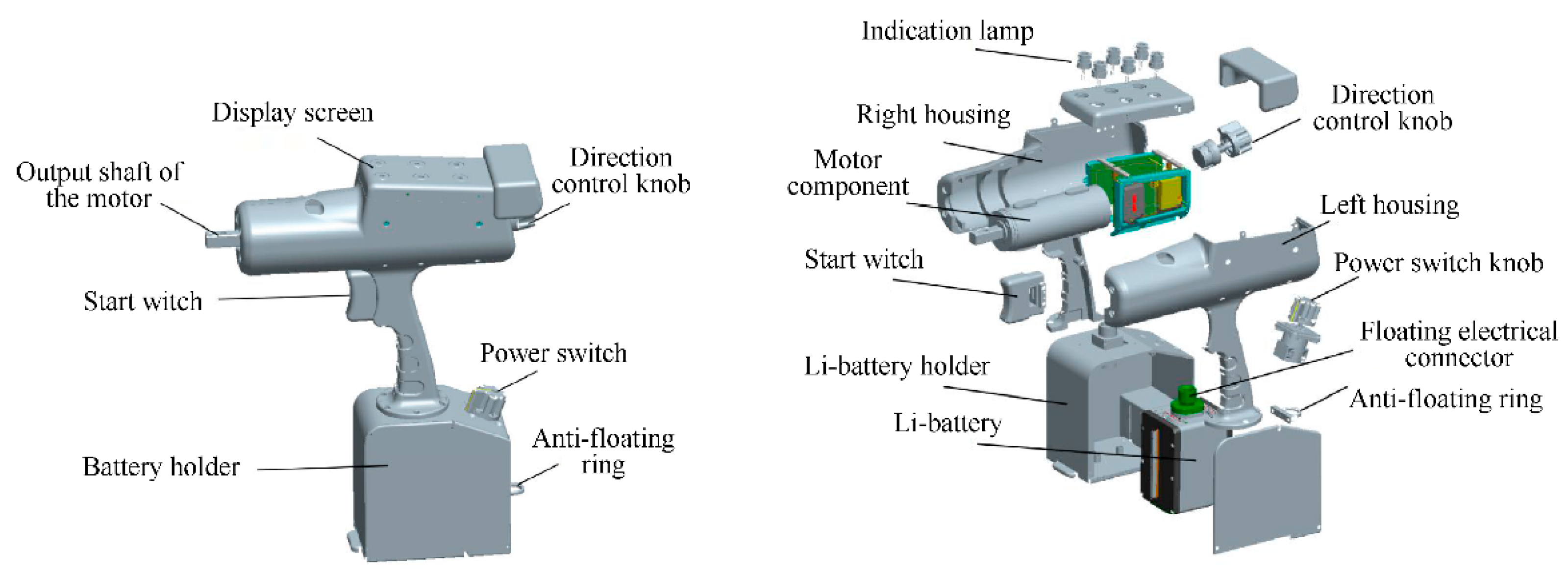
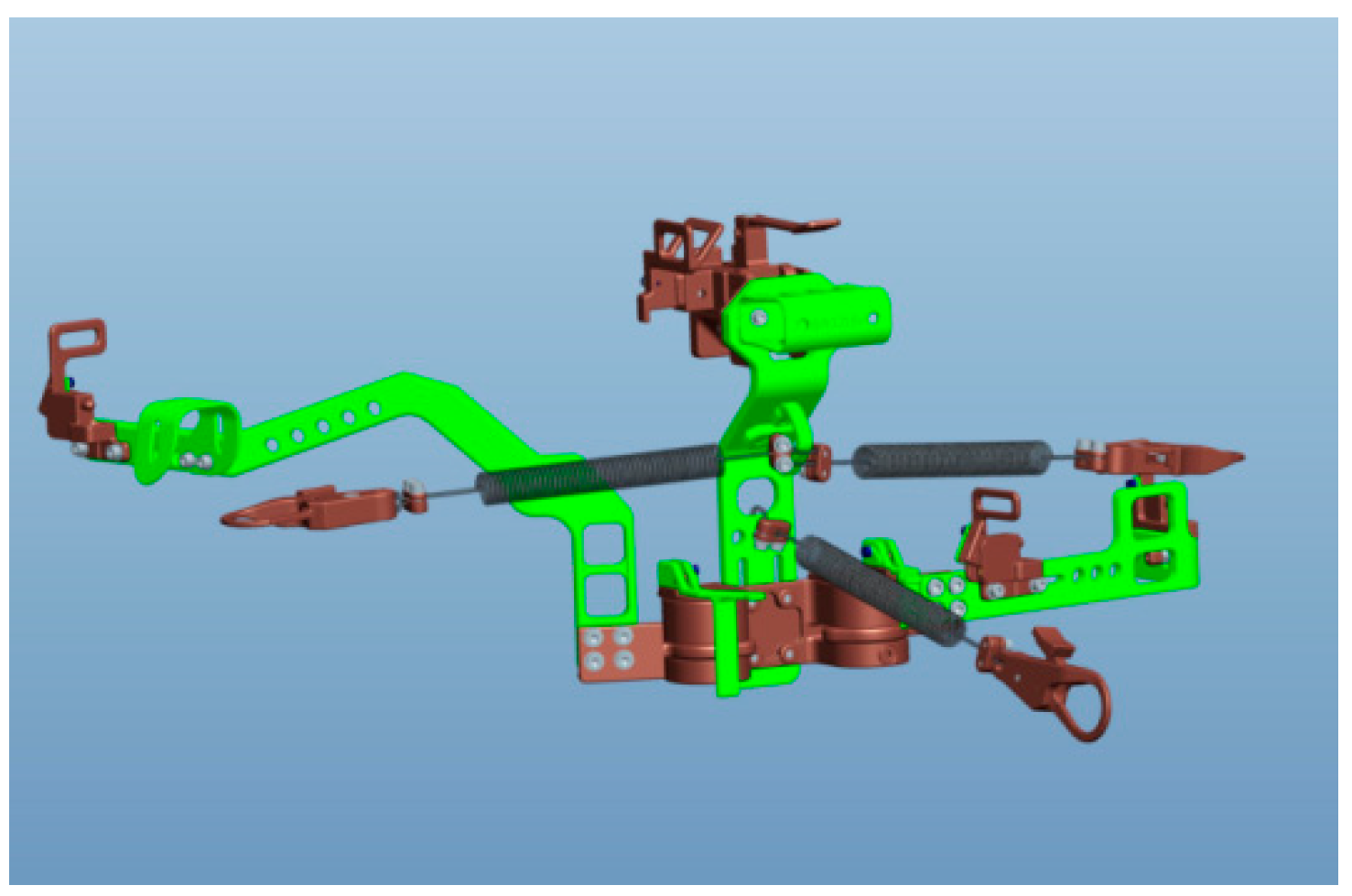
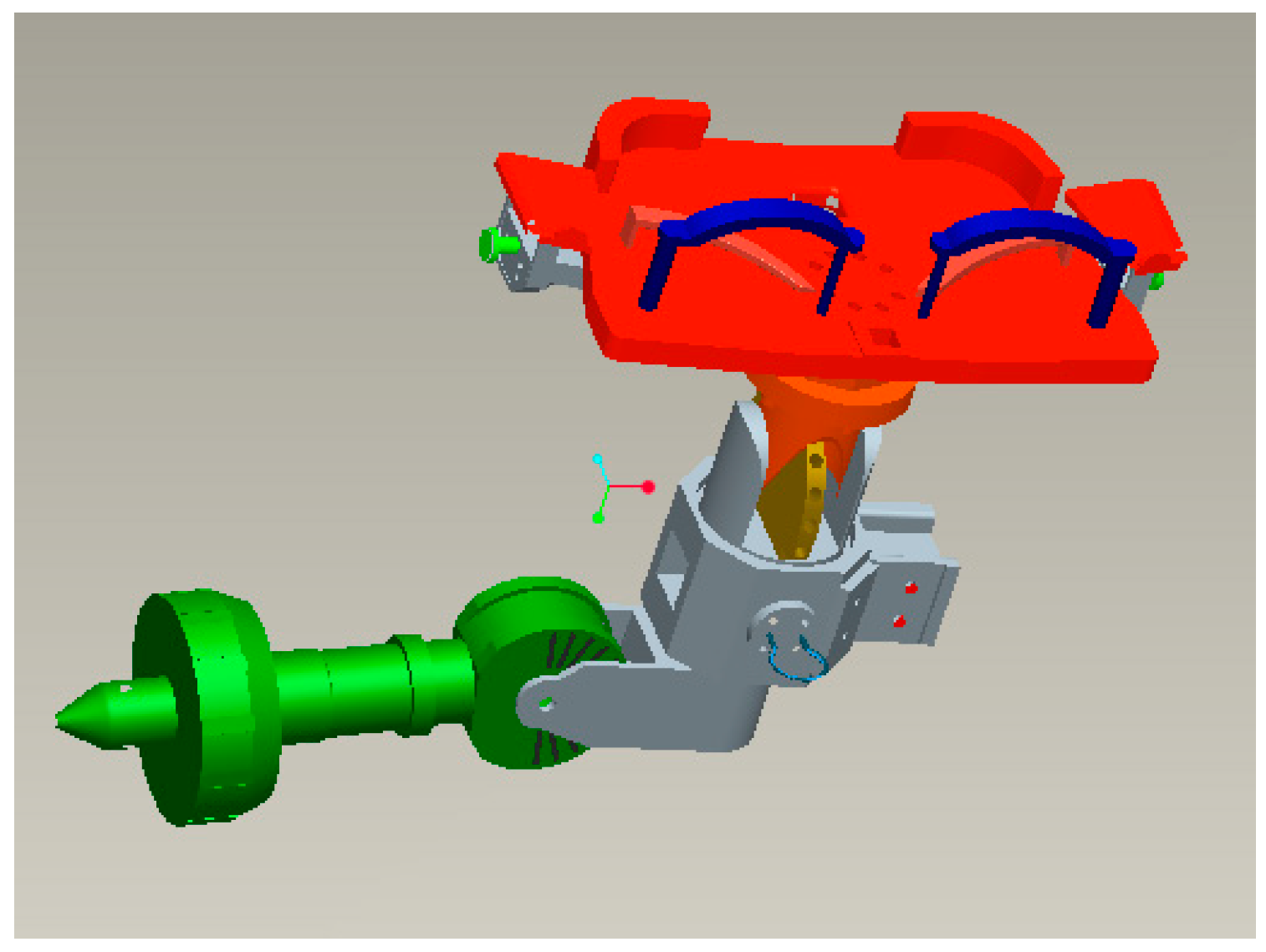
4.3. Design of Extravehicular General Facilities
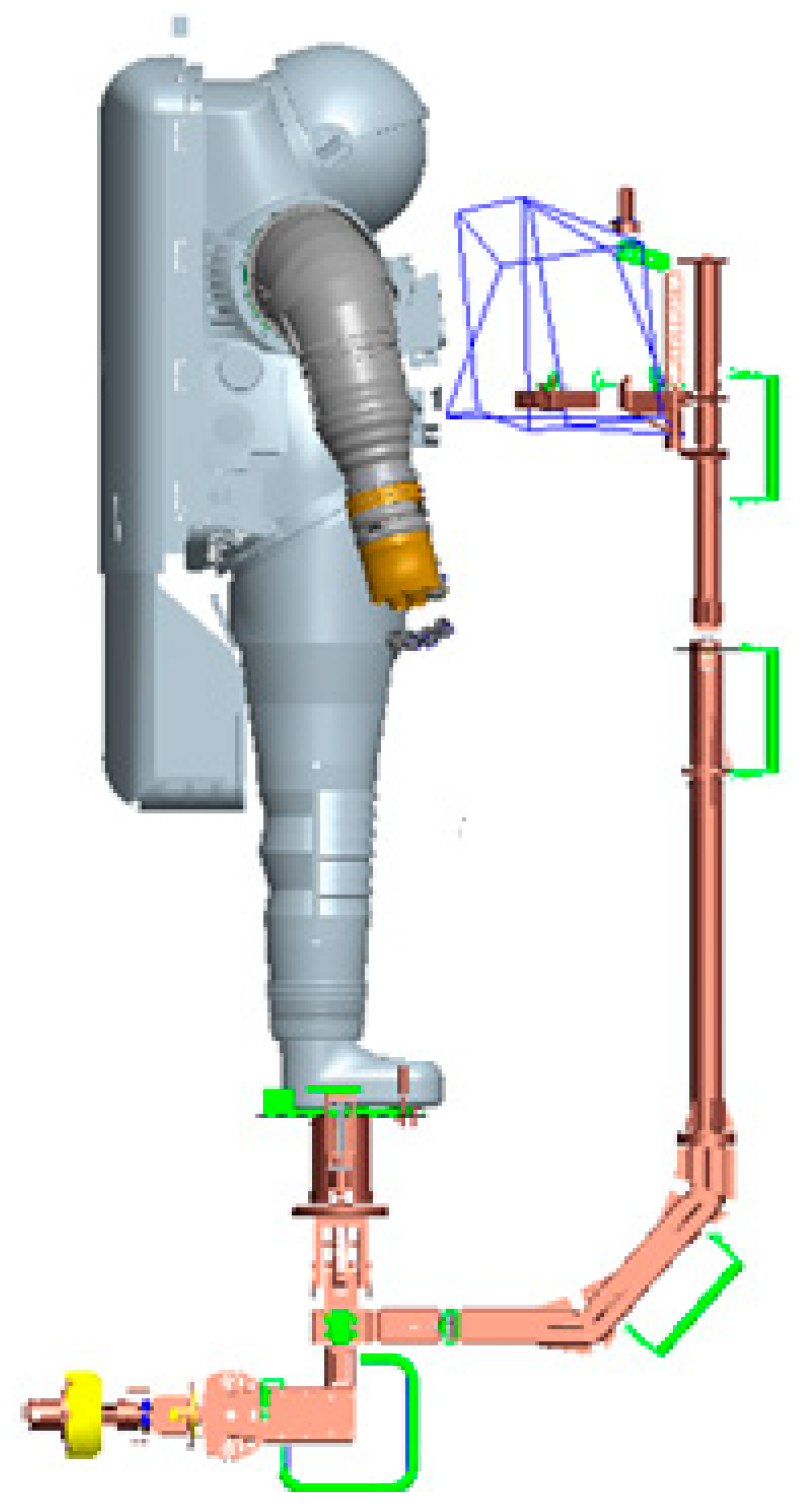
4.4. Support Technologies for Extravehicular Spacesuits
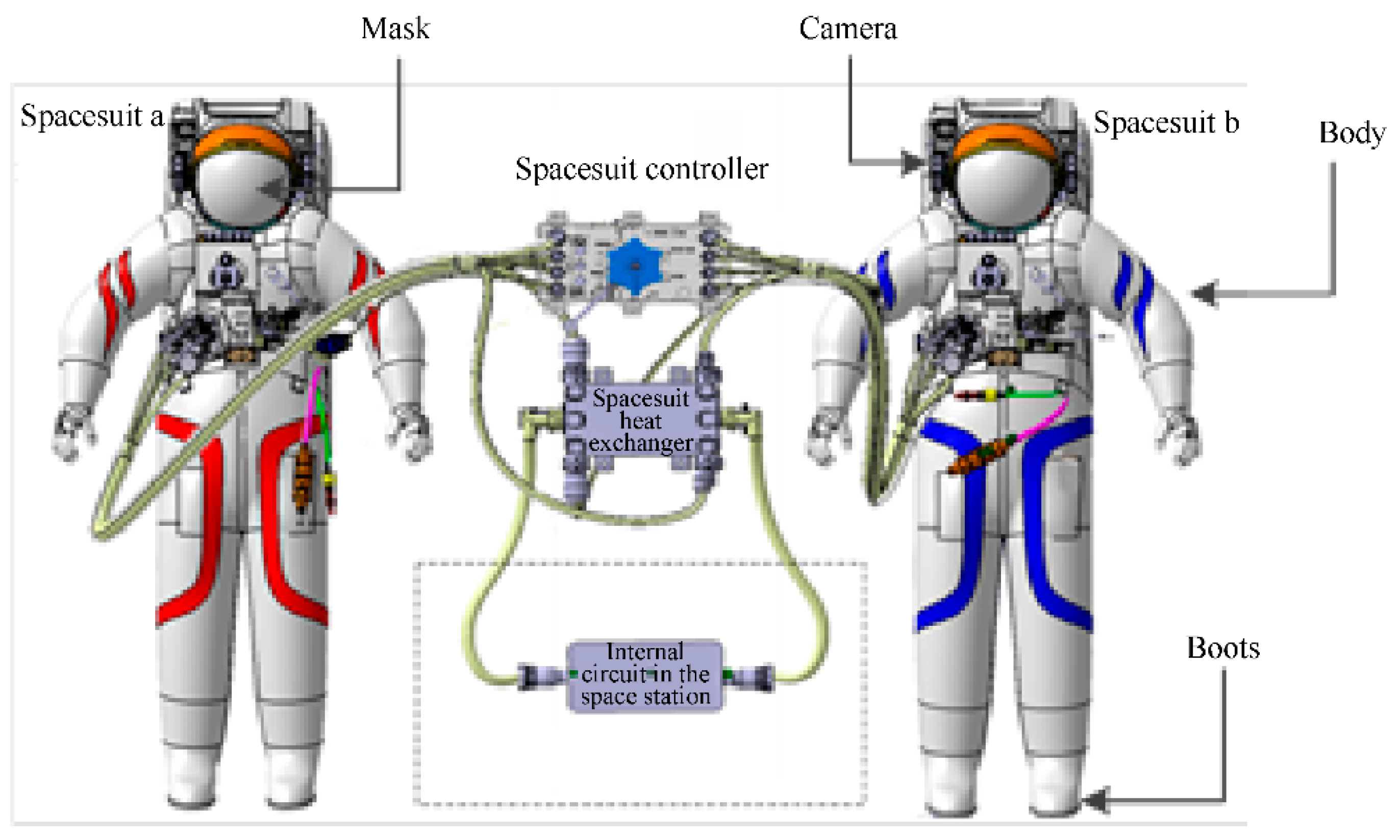
4.5. Support Technologies for Communication, Lighting, and Monitoring of EVA
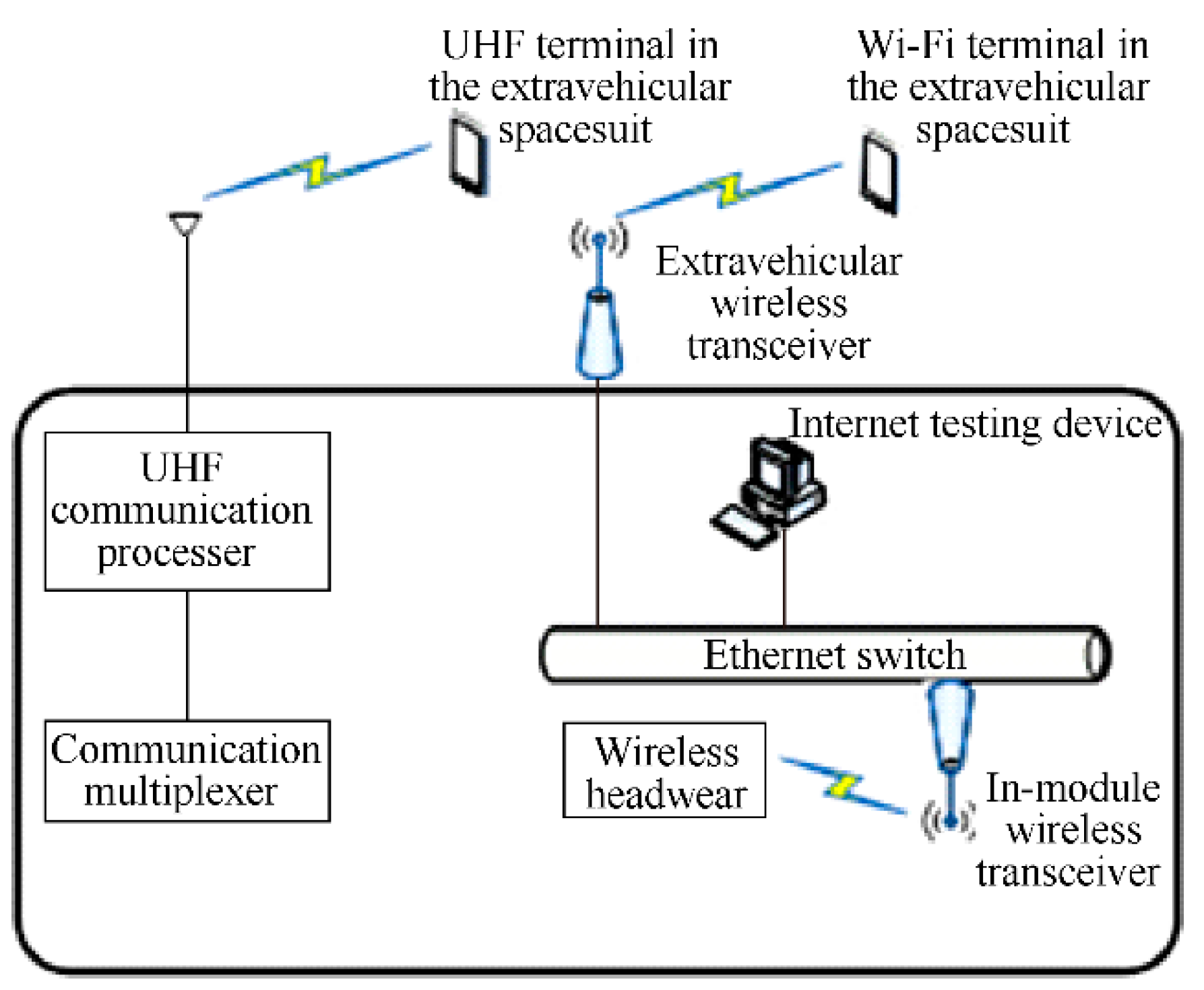
4.5.1. Design of Communication Systems
4.5.2. Design of Camera Systems
4.6. Design and Implementation of the Safety System for EVA
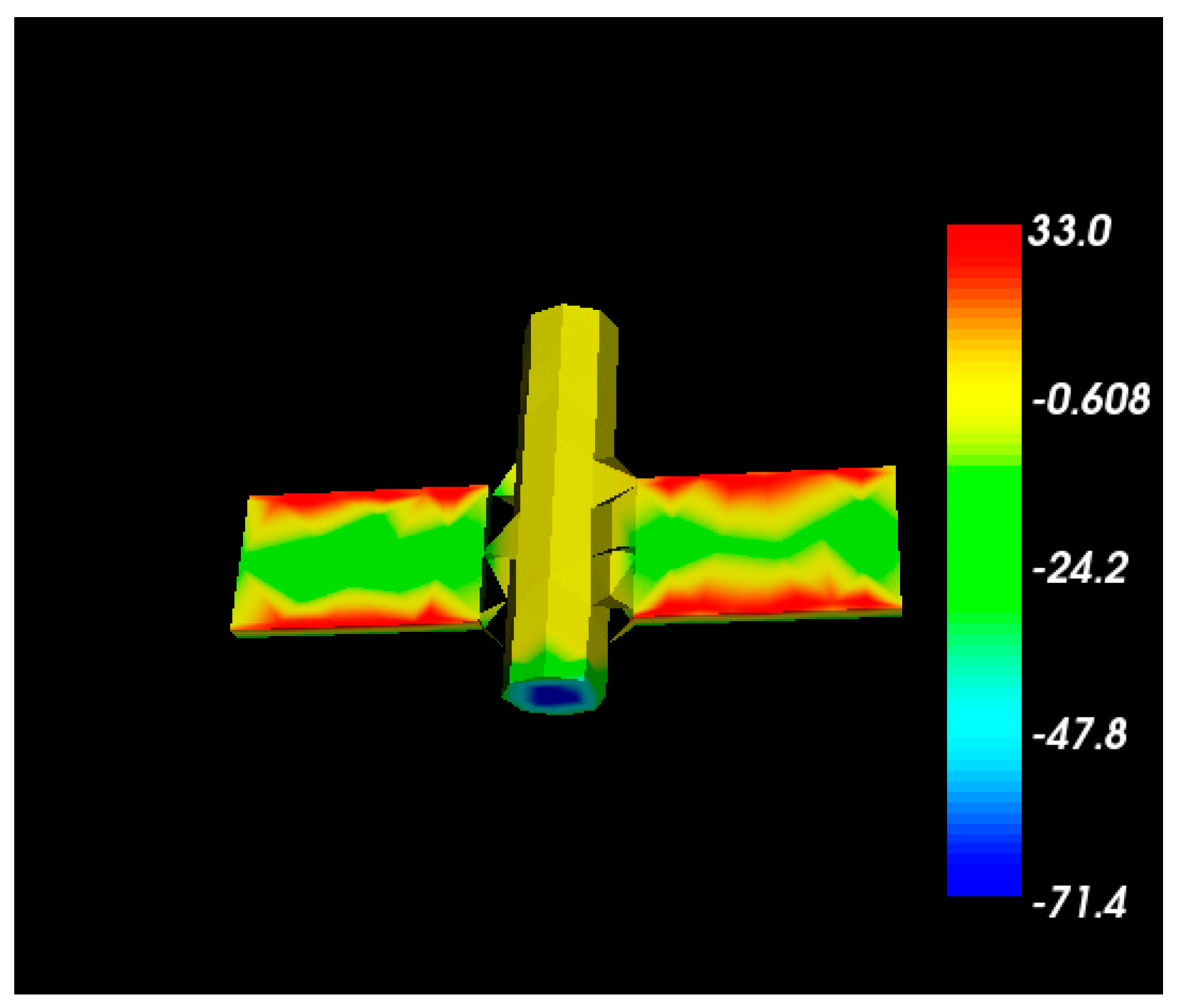
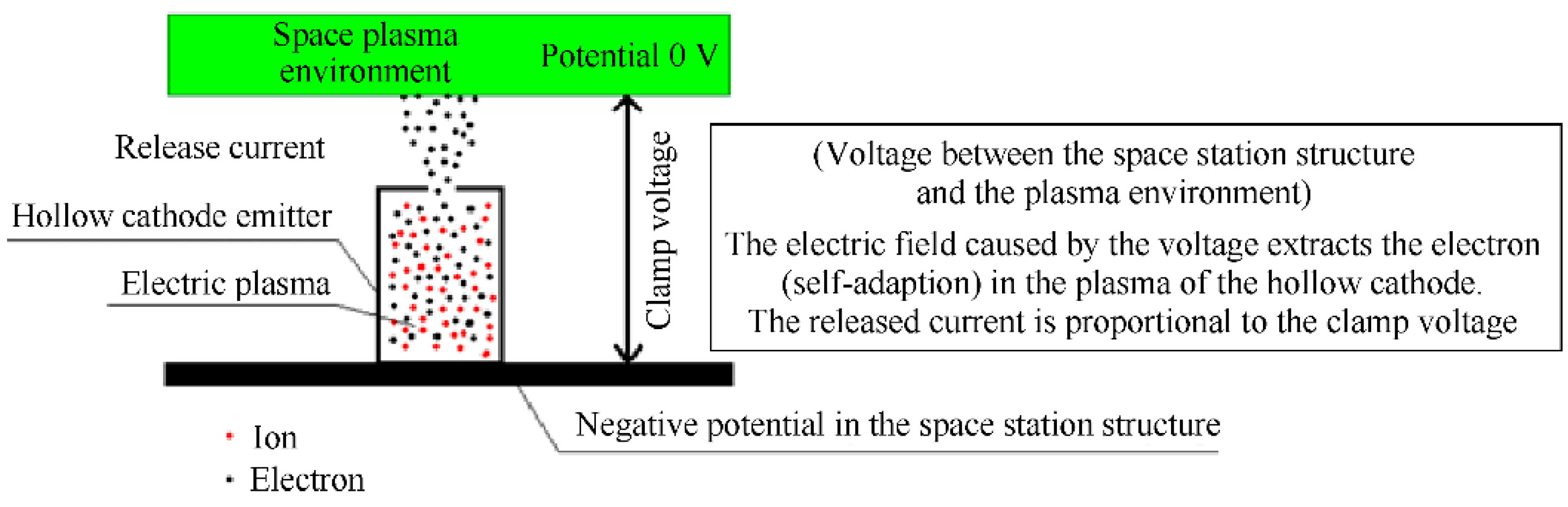
4.6.1. System Design for Active Potential Control in the EVA Space Environment
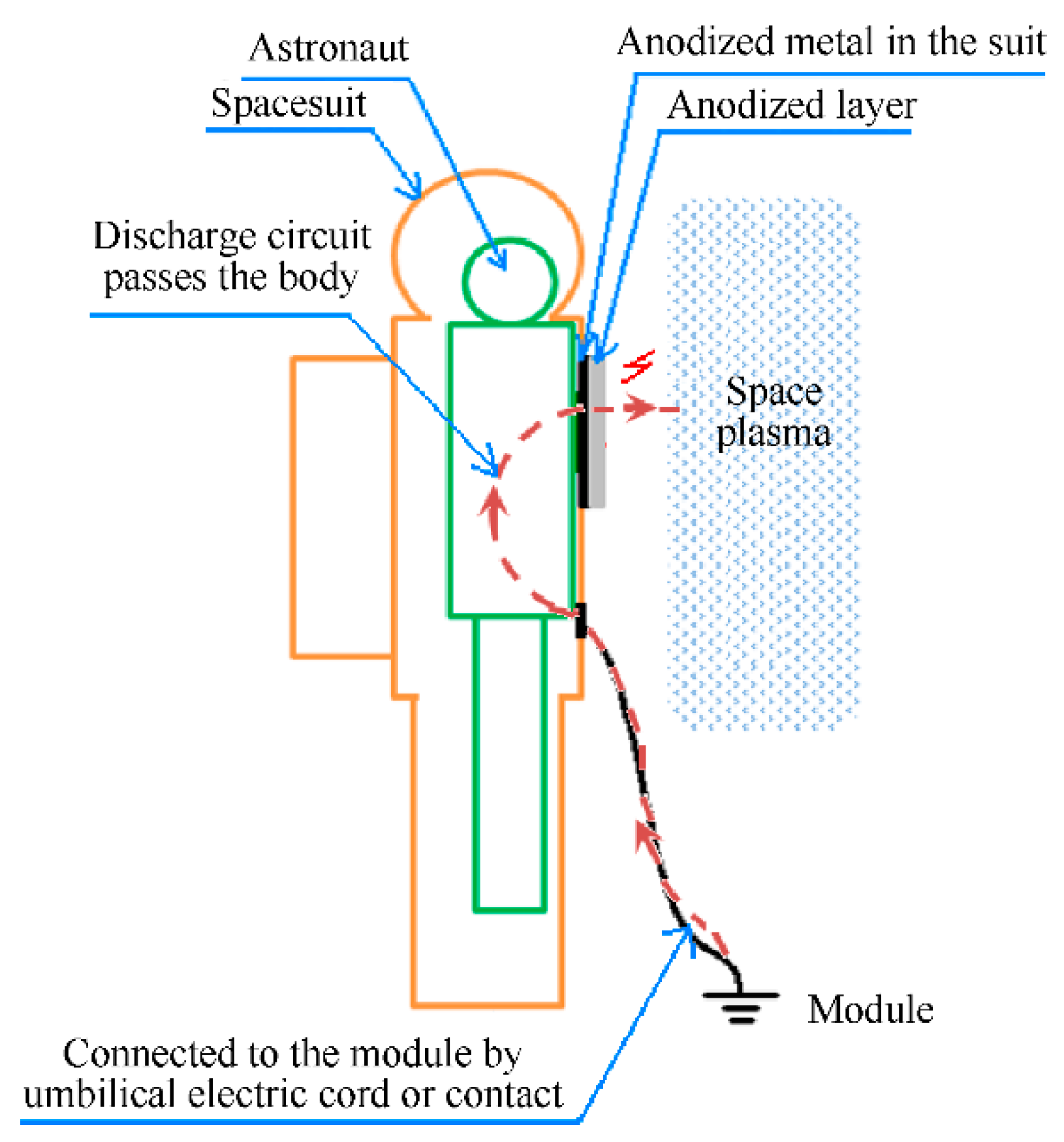
4.6.2. Discharge Circuit (Space Station–Astronaut–Spacesuit–Plasma Environment)
- (1)
- There are exposed surface anodized metals on the surface of the spacesuit;
- (2)
- There is no insulation protection between surface-anodized metal and astronauts;
- (3)
- Astronauts are in contact with surface anodized metal and module structure at the same time (connected to the module by umbilical electric cord or contact);
- (4)
- The discharge threshold of the surface anodized metal is lower than the structure potential of the space station.
4.6.3. Active Potential Control System
4.7. Verification Technologies for EVA on the Ground
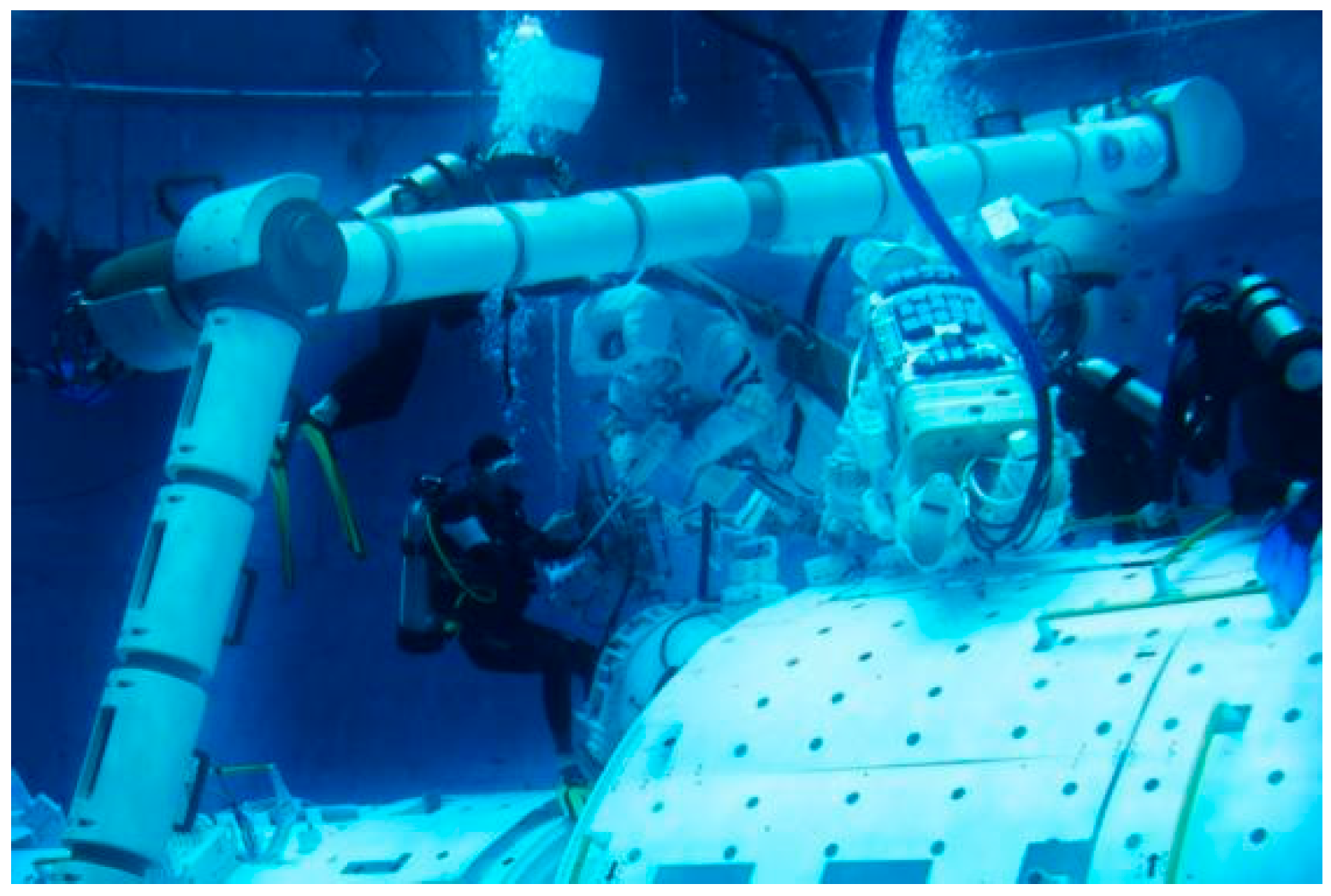
4.7.1. Simulation Verification under Microgravity
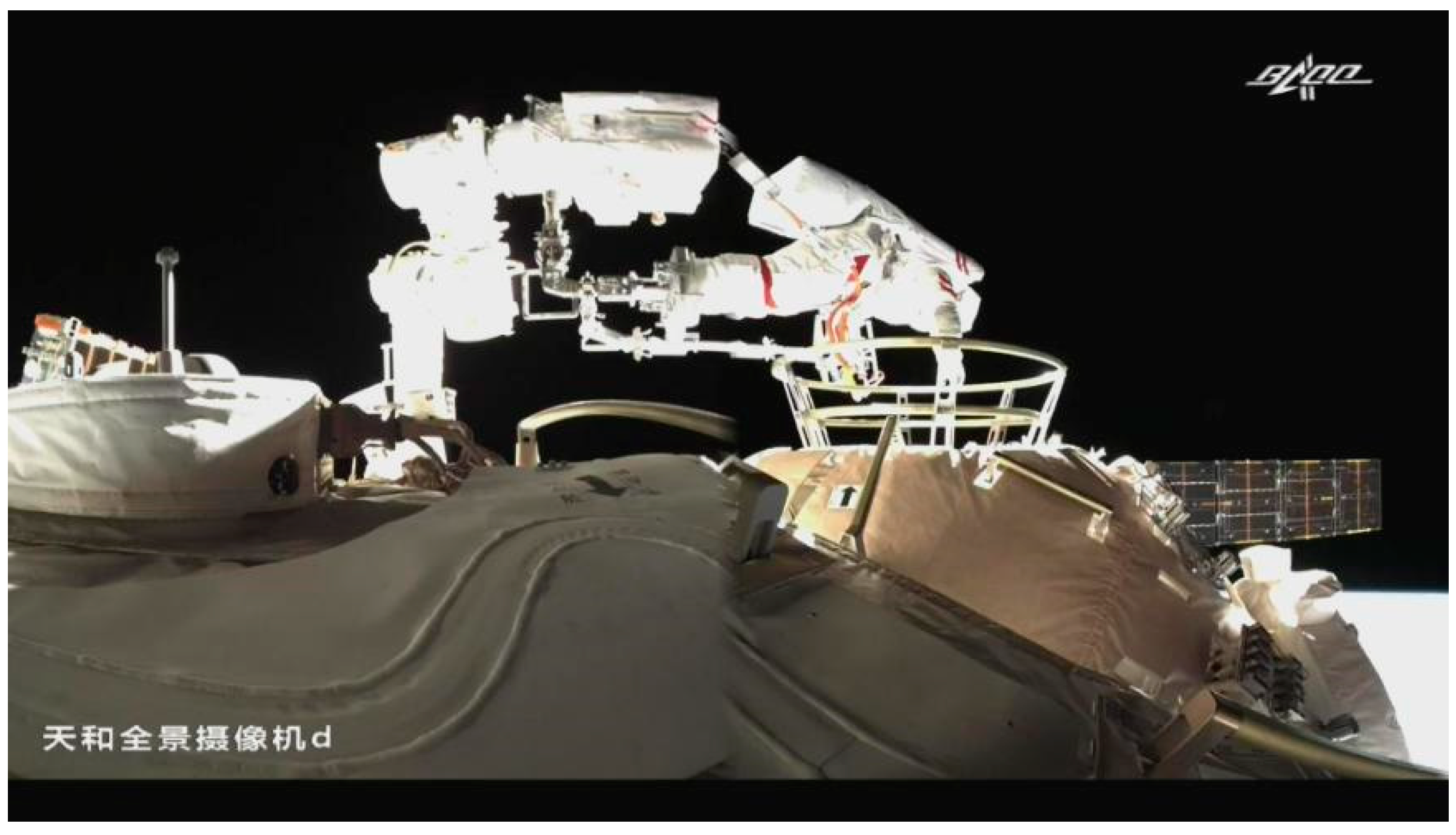
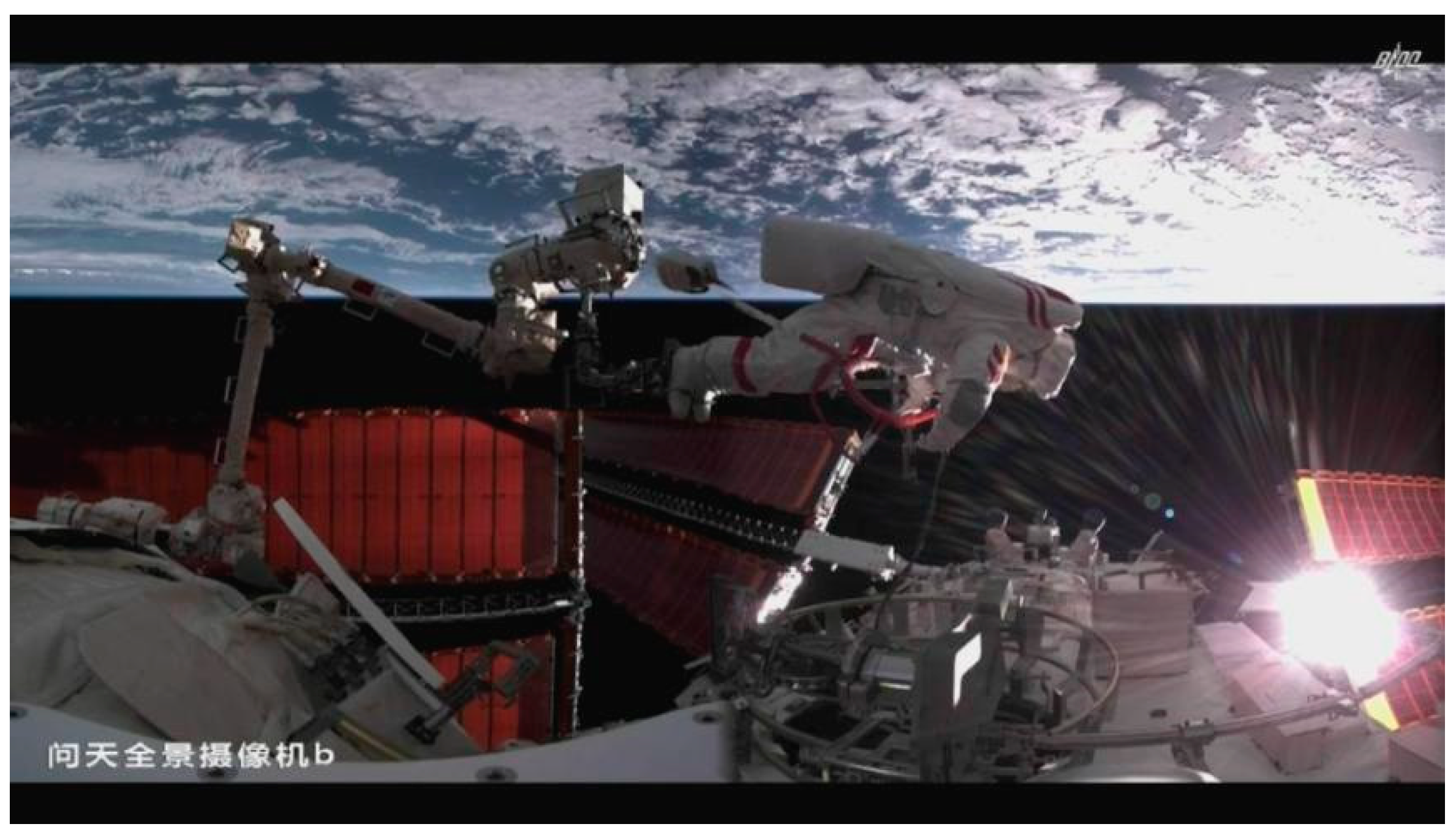
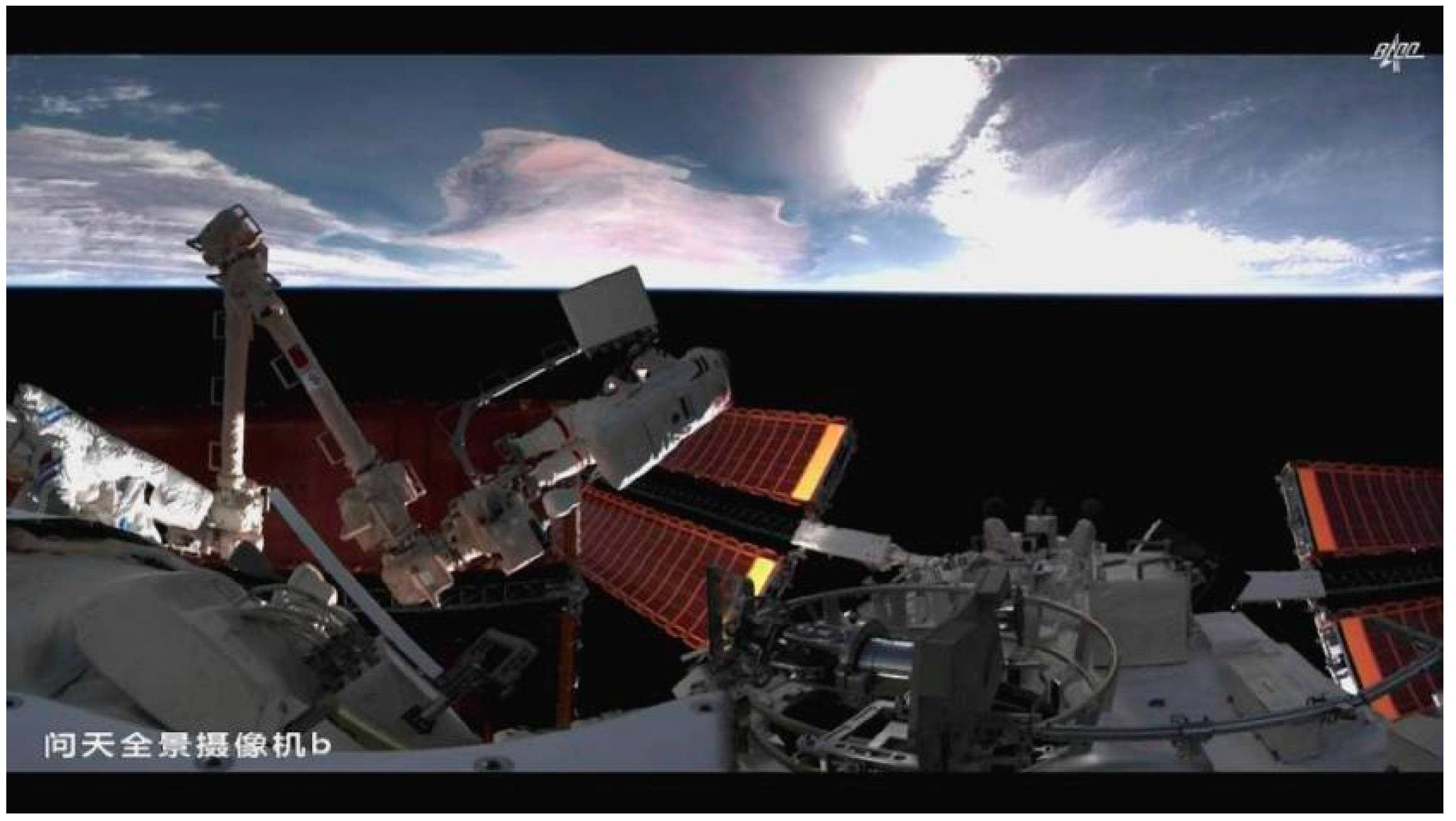
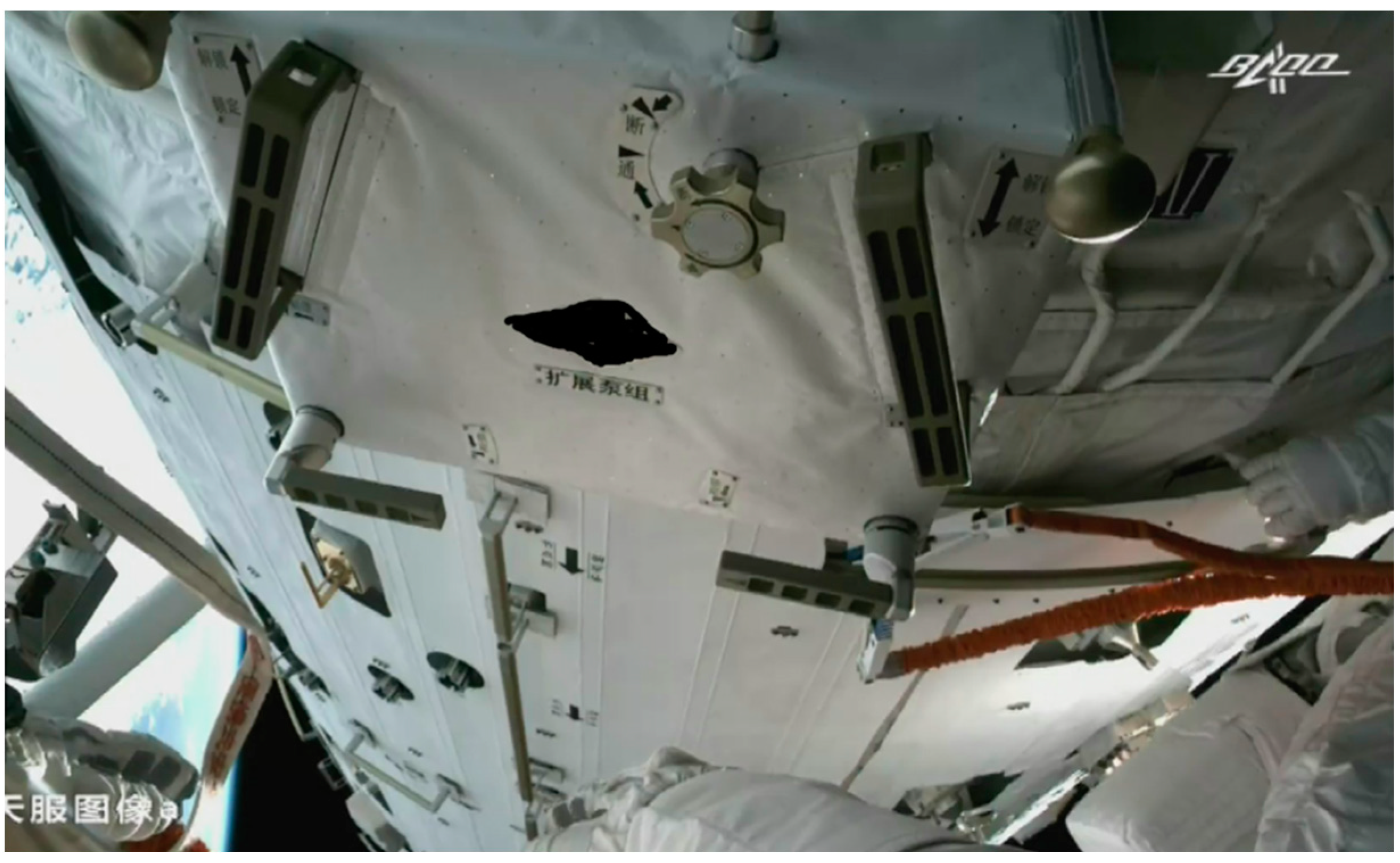
4.7.2. In-orbit Flight Verification
4.7.3. Future Works
5. Features and In-Orbit Application Status of Main EVA Technologies
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xiang, W.; Qiao, Z.; Wei, W. System characteristics and prospect of China Space Station. Spacecr. Eng. 2022, 31, 26–39. (In Chinese) [Google Scholar]
- Bainan, Z. Starting a new journey for China’s Manned Space Program. Aerosp. China 2021, 9–13. (In Chinese) [Google Scholar]
- Yang, H.Y. System design from space laboratory to China Space Station. Spacecr. Eng. 2022, 31, 7–14. (In Chinese) [Google Scholar]
- Fan, W.W.; Han, L.; Yang, F.; Wang, H.M. Review of Scientific Research and Application on ISS in 2018. Manned Spacefl. 2019, 25, 271–276. (In Chinese) [Google Scholar]
- Shayler, D.J. Walking in Space; China Astronautic Publishing House: Beijing, China, 2007. (In Chinese) [Google Scholar]
- Yang, H. Human Spacecraft Technology; Beijing Institute of Technology Press: Beijing, China, 2018. (In Chinese) [Google Scholar]
- Zhou, J. Chinese Space Station Project’s overall vision. Manned Spacefl. 2013, 19, 1–10. (In Chinese) [Google Scholar]
- Zhu, G. Development on Configuration Technology of China Manned Spacecraft. Spacecr. Eng. 2022, 31, 46–53. (In Chinese) [Google Scholar]
- Zhu, G.; Jia, S. The Ground Verification of Spacecraft EVA Functions. Manned Spacefl. 2009, 15, 48–53. (In Chinese) [Google Scholar]
- Zhi, S.; Bainan, Z. Research and Development by Shen Zhou-7. Manned Spacefl. 2009, 15, 16–21. (In Chinese) [Google Scholar]
- Dajian, H.; Peng, Y.; Shaowei, Y. Mobility management of LEO satellite communication networks. Chin. Space Sci. Technol. 2016, 36, 1–14. [Google Scholar]
- Ferguson, D.C.; Craven, P.D.; Minow, J.L. A theory for rapid charging events on the international space station. In Proceedings of the 1st AIAA Atmospheric and Space Environments Conference, San Antonio, TX, USA, 22–25 June 2009. [Google Scholar]
- NASA-HDBK-4006; Low Earth Orbit Spoeeeraft Charging Desip Handbook. National Aeronautics and Space Administration: Washington, DC, USA, 2007.
- Liang, X.F.; Zhou, D. Influences of surface charging on astronaut EVA and countermeasures. Spacecr. Acecraft Environ. Eng. 2014, 4, 2–31. (In Chinese) [Google Scholar]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spacecraft | Location | Shape | Module Doors | Dedicated or Dual-Purpose |
|---|---|---|---|---|
| Sky Lab | Module in the transition module | Dual cylinders | 3 | Transition/airlock |
| Salyut | Module in the transfer module | Single cylinder | 3 | Transfer/airlock |
| Middle module of the Spacecraft | Hanged outside the middle module | Single cylinder | 2 | Dedicated |
| Zvezda | Module in the transition module | Single cylinder | 2 | Dedicated |
| ISS “Quest” | Hanged outside; a module in the module | Dual cylinders | 2 | Dedicated |
| ISS Pris | Hanged outside | Single cylinder | 3 | Transition/airlock |
| Core module of CSS | Module in the transition module | Spherical | 6 | Transition/airlock |
| Lab module I of CSS | Module in the transition module | Single cylinder | 2 | Airlock |
| Item | Mir | ISS | Shenzhou VII | CSS |
|---|---|---|---|---|
| Astronauts allowed to pass the airlock | 2 | 2 | 2 | 2 |
| Gas relief/recovery | Nil | 70% | Nil | 73.4% |
| Extravehicular transfer support | Dual-degree-of-freedom hanger | 7-degree-of-freedom manipulator | Nil | 7-degree-of-freedommanipulator |
| Pressure mechanism | 40 kPa | 30 kPa | 40 kPa | 40 kPa |
| EVA mode | Autonomous | Autonomous | Umbilical | Autonomous |
| EVA duration | 7 h + 1 h | 8 h | 30 min (real) | 8 h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Xie, Y.; Tian, Y.; An, F. A Study on the Design and Implementation Technologies of EVA at the China Space Station. Aerospace 2024, 11, 264. https://doi.org/10.3390/aerospace11040264
Li X, Xie Y, Tian Y, An F. A Study on the Design and Implementation Technologies of EVA at the China Space Station. Aerospace. 2024; 11(4):264. https://doi.org/10.3390/aerospace11040264
Chicago/Turabian StyleLi, Xuedong, Yuan Xie, Yumo Tian, and Fengjiang An. 2024. "A Study on the Design and Implementation Technologies of EVA at the China Space Station" Aerospace 11, no. 4: 264. https://doi.org/10.3390/aerospace11040264