1. Introduction
On 27 December 2022, the Korea Aerospace Research Institute (KARI) officially announced the successful insertion of the Korea Pathfinder Lunar Orbiter (KPLO) into lunar orbit. This achievement marks a significant milestone in the Republic of Korea’s space history, as KPLO is the first Korean spacecraft to venture beyond Earth. The ultimate goal of KPLO is to establish fundamental deep space technology for future space exploration by Korea and to advance lunar science by conducting a one-year mission around the Moon. More specifically, the KPLO mission has established the following three main objectives. First, to secure critical technologies for lunar explorations that could potentially be extended to further planetary missions. Second, the mission involves investigating the lunar environment, which includes creating a lunar topographic map to facilitate future lunar landing site selection, conducting a survey of lunar resources, and studying the radiation and surface conditions on the Moon. Lastly, demonstrating and validating space internet technology are the final objectives of the mission. After a successful 4.5-month journey using a Ballistic Lunar Transfer (BLT) trajectory, KPLO is now operating in a circular orbit with an altitude of 100 ± 20 km and an inclination of 90 degrees, with all systems functioning normally [
1,
2,
3,
4]. To achieve mission objectives, the KPLO is equipped with six scientific instruments to facilitate its mission, including the Lunar Terrain Imager (LUTI) for capturing detailed images of the lunar surface [
5], the KPLO Gamma Ray Spectrometer (KGRS) for conducting elemental mapping by measuring gamma rays emitted from the lunar surface [
6], the KPLO MAGnetometer (KMAG) for examining the magnetic environment of the Moon [
7], the Wide Angle Polarimetric Camera (PolCam) for investigating the process of space weathering and the Moon’s internal evolution [
8], the Delay/Disruption Tolerant Networking experiment payload (DTNPL) for testing communication protocols in challenging conditions [
9], and the ShadowCam for exploring the permanently shadowed regions of the Moon [
10]. In
Figure 1, the in-flight configuration of KPLO and the positions of the payloads onboard are depicted [
4], and
Figure 2 is an image taken by the LUTI payload on 28 December 2022 from 124 km above the lunar surface [
11].
After the launch of the Lunar Reconnaissance Orbiter (LRO) mission in 2009 [
12], lunar exploration didn’t receive much attention for some time, but now it’s gaining significant interest worldwide. Multiple countries and private companies are engaging in lunar exploration, and there is a unique trend of using small satellites, especially CubeSats. Some major lunar exploration missions include the National Aeronautics and Space Administration (NASA)’s Artemis program [
13], India’s Chandrayaan program [
14,
15], and China’s Chang’e program [
16,
17,
18]. Additionally, Astrobotic’s Peregrine Lander, scheduled for a launch in 2023, aims to make history as the first private company’s lunar landing mission [
19]. Regarding small satellites, NASA’s Cislunar Autonomous Positioning System Technology Operations and Navigation Experiment (CAPSTONE) successfully tested new navigation technologies near the Moon with a mass of approximately 25 kg [
20]. The Lunar Meteoroid Impact Observer (LUMIO) is also making progress as one of the two winning concepts from the European Space Agency (ESA) SysNova Lunar CubeSats for exploration challenge [
21].
In recent years, the significance of space exploration through international collaboration has been greatly emphasized. Numerous countries and private companies actively cooperate to undertake space exploration missions, not only in system development but also in-flight operation, for their shared objectives. In the past, international collaboration in space explorations was not very active, but there have been notable instances. For example, Japan Aerospace Exploration Agency (JAXA)’s Kaguya [
22] and Indian Space Research Organization (ISRO)’s Chandrayaan mission [
23] involved a joint effort with Jet Propulsion Laboratory (JPL) for the Orbit Determination (OD). Additionally, China’s Chang’e missions collaborated with the European Space Operations Center (ESOC) for telemetry and tracking services [
24].
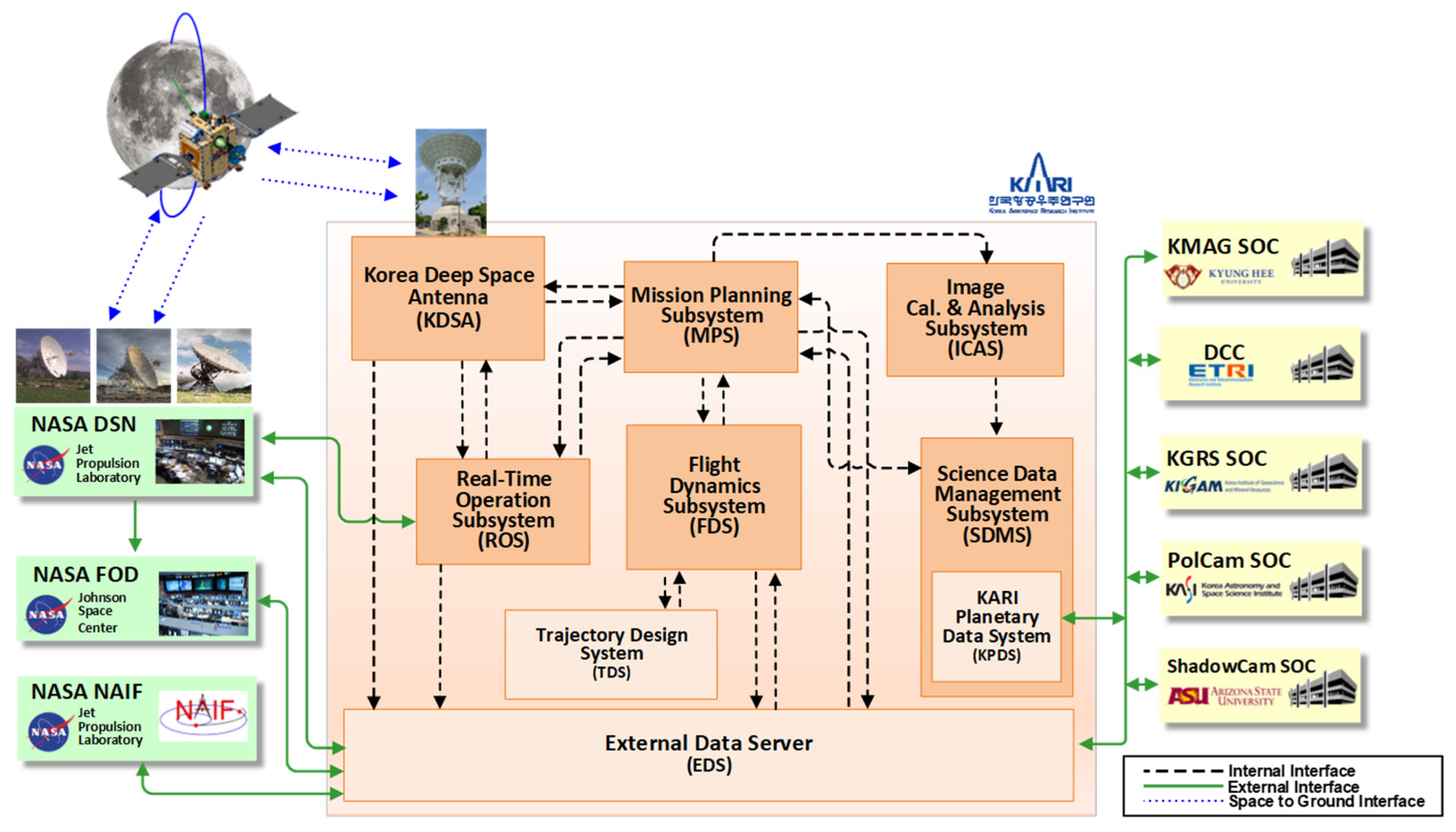
Given that the KPLO mission was Korea’s first lunar exploration, both the development process and operational preparation for the bus and the ground system were far from smooth. Despite KARI’s extensive experience and know-how in developing and operating numerous Low Earth Orbit (LEO) and Geosynchronous (GEO) satellites, the development of a lunar exploration spacecraft presented completely different challenges. Throughout the development and operation of KPLO, numerous factors presented significant differences from those of traditional Earth-orbiting spacecraft. Specifically, the trajectory/orbit design, as well as Flight Dynamics (FD) operation, differed greatly from the experience and expertise previously held by KARI. However, KARI was able to overcome these challenges and successfully operated KPLO through collaborative efforts with NASA. In 2016, KARI and NASA reached an agreement for the KPLO program. As part of the agreement, NASA agreed to provide the Deep Space Network (DSN) service and navigation support to KPLO in exchange for onboarding the U.S. payload, the ShadowCam [
25]. As a part of the collaborative agreement between KARI and NASA, the KPLO FD team and NASA Johnson Space Center (JSC) Flight Operations Directorate (FOD) worked together as partners to ensure the successful FD operations of KPLO. The collaboration between the KPLO FD team and JSC FOD occurred within the KARI’s KPLO Mission Operation Center (KMOC) and NASA JSC Mission Control Center (MCC). Therefore, readers should note that the terms KMOC and MCC will be used to refer to the KPLO FD team and JSC FOD, respectively, hereinafter, unless otherwise specified.
Although KMOC and MCC collaborated for the successful FD operation of KPLO, KARI holds the ultimate responsibility for KPLO operations, encompassing spacecraft operation, troubleshooting, and providing primary FD solutions to MCC. The real-time support from MCC is limited to periodic independent solutions, namely, Independent Verification and Validation (IV&V) activities. Due to the nature of IV&V, encountering numerous obstacles was inevitable during the collaborative work. Despite the importance of joint collaborative work, it is true that there is a lack of relevant references, particularly those based on practical experiences and know-how. Experts in related fields often encounter practical challenges while planning, preparing, and conducting international collaborations, especially when they are engaging in such collaborations for the first time.
This paper aims to offer valuable insights into successful strategies for international collaboration by addressing challenges and discussing proactive efforts to overcome them, especially focusing on the joint FD operation preparation perspectives. Specifically, this paper outlines the overall concept of the joint FD operation between KMOC and MCC, highlights the extensive efforts undertaken to achieve a successful joint FD operation, and ultimately addresses the practical lessons learned throughout the six-year journey. As a result, members of KMOC and MCC experienced a strong sense of unity and teamwork during the real-time KPLO FD operation. The insights from this work can offer valuable guidance for future KARI–NASA collaborations and other international FD operations in space exploration missions. The outcomes can help minimize trial and error in such collaborative endeavors, promoting smoother and more efficient collaborations. The current paper is structured as follows:
Section 2 provides an overview of joint FD operations and a summary of the Operational Interface Procedure (OIP) document, including the top-level concepts and interfaces of the ground systems used, as well as the roles of both entities in the collaboration.
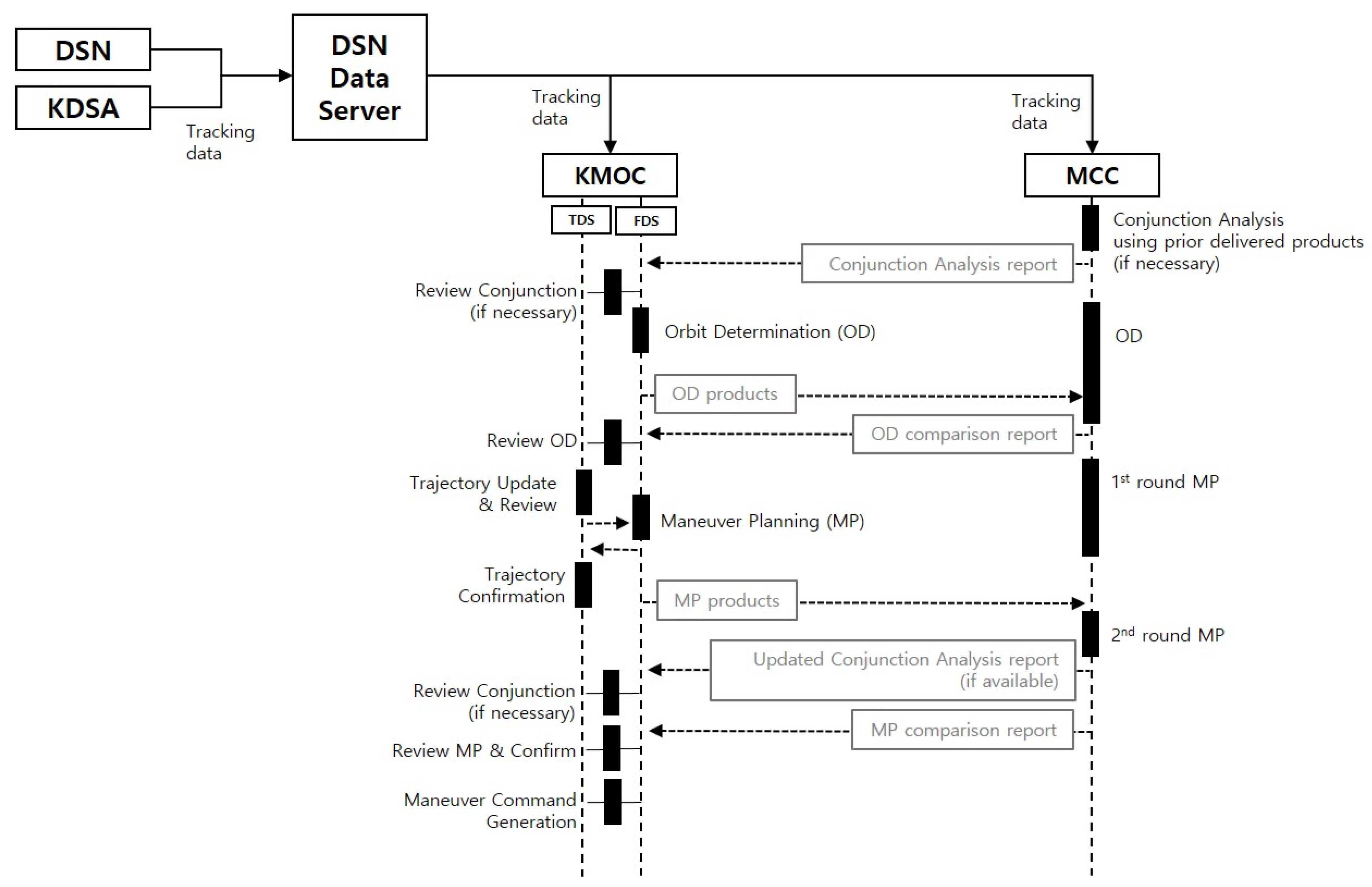
Section 3 details the collaborative efforts made by KMOC and MCC. Various tests and their associated results are presented. Additionally, the results of rehearsals conducted to prepare for actual operations are discussed, including the established operating procedures with their timelines.
Section 4 covers the practical lessons learned during the joint KPLO FD operation. Finally,
Section 5 presents the conclusion.
4. Challenges and Lessons Learned
Synchronizing the settings of different software solutions and collaborating as one team in actual FD operations was far from easy. Through numerous trials and errors, several crucial lessons were learned.
4.1. Terminology and Common Knowledge
Mutual understanding of definitions and sharing detailed operational concepts were of utmost importance in the collaboration. Despite its obviousness, there were instances where this aspect was overlooked, leading to additional time spent resolving related issues. Sharing common knowledge becomes even more critical in joint international efforts, as terms that may seem straightforward can have different interpretations and uses by each entity. For instance, during the comparison of FD software solutions between KMOC and MCC, both parties had to verify and review the types, definitions, and availability of coordinate systems used by each other, even encountering coordinate systems that were not actually utilized by either institution’s FD software. Additionally, minor terms used during joint testing and rehearsals, such as “test” or “rehearsal”, had slightly different meanings and approaches for each entity, resulting in further confusion.
Initially, the extent and level of detail required to exchange common knowledge between KMOC and MCC were not thoroughly considered, as both teams were already experts in the FD field. However, after the Part 1 practical test, KMOC provided a comprehensive document to MCC detailing the engine characteristics of KPLO. This document covered thruster installation configuration, operational modes, types of thruster usage, thrust, specific impulse (Isp) time-varying characteristics, and the associated algorithm implemented by KMOC. The delivery of this document and subsequent updates to MCC’s MTS yielded satisfactory and accurate outcomes.
The authors strongly recommend verifying term definitions and common knowledge before investing further effort, regardless of how trivial it may seem, in case of any doubts. Utilizing interface control documents can enhance mutual understanding, containing all necessary information for knowledge sharing. Detailed and clear explanations should be provided to the fullest extent possible. Although writing OIP and trajectory requirement documents between KMOC and MCC was laborious, their detailed content proved highly beneficial for successful and reliable joint FD operations. Regular updates and sharing of these documents are essential for effective communication and collaboration.
4.2. Parameters and Configuration
Comparing software solutions from different entities was a highly challenging task because each software was developed using different programming languages and algorithms. In the context of IV&V, it became even more difficult as KMOC and MCC had to proceed without a clear understanding of the internal details, such as the algorithms and parameter definitions used by the software. Despite using validated FD software, FD specialists had to fine-tune input values and verify parameter definitions to ensure close alignment between the solutions derived by the two entities.
For example, to improve the results of MP solution comparisons, in addition to their efforts on matching the KPLO engine modeling, KMOC and MCC engineers revisited every detail of algorithms and parameter definitions from the beginning. Every perturbing force applied with associated algorithms was revisited while solving the issues raised from the practice test. An applied numerical integrator to compare MP solutions was also double-checked with a step-size control method. After consistency was ensured, every definition of target parameters with associated tolerance applied for each entity was checked again to ensure that both KMOC and MCC’s FD software were on the same page.
In terms of OD solution comparisons, engineers had to invest a more significant amount of effort and time compared to MP solution comparisons. The details of dynamic settings for OD were double-checked. This included verifying various parameters like OD noise setting, DSN and KDSA geodetic location, speed of light, transponder delay, relativistic correction, luminosity, Earth Orientation Parameter (EOP), space weather model, nutation/precession model, and other more detailed spacecraft-related parameters. Any discrepancies identified during the double-checking process were further analyzed to evaluate their potential impact on the overall solution comparisons. It was found that there were minimal differences in the parameters and models used by KMOC and MCC. Fortunately, these differences were determined to have no significant effect on the solutions derived by each entity.
A valuable lesson learned from this collaboration was the importance of implementing a systematic verification process for dynamic settings, such as parameters and configurations, in advance. Despite the impressive problem-solving skills displayed by FD specialists from both KMOC and MCC, it was unfortunate that prior confirmation of these elements was overlooked. Even for highly specialized entities involved in such collaborations, the authors strongly recommend confirming the parameters and configurations for the software used by each entity beforehand. This simple and essential approach would undoubtedly enhance the effectiveness and productivity of the collaboration.
4.3. Staffing and Joint Team Building
Through this collaboration, KMOC has gained a profound understanding of the criticality of staffing in FD operations, particularly in planetary exploration missions. This is because the KPLO mission marked a significant milestone in the Republic of Korea’s space development history as its first-ever mission beyond Earth’s orbit while simultaneously being the first case of conducting joint FD operations in international collaboration. The FD operations for lunar exploration missions exhibit notable distinctions, not only in terms of design, development, and verification of related subsystems but also in their operations when compared to the conventional FD operations for LEO or GEO satellites. It is indeed true that KMOC, namely KARI, overlooked this crucial staffing and team-building aspect.
The KPLO FD operations were conducted by a small team of KMOC personnel, who had a limited number of members. They had the responsibility for all aspects of FD-related tasks for KPLO, including the design, development, and verification of the TDS and FDS, as well as operations. However, contrary to KARI’s expectations, the KPLO FD team faced a substantial increase in workload as the mission progressed due to the nature of planetary exploration missions. Specifically, KPLO selected the BLT trajectory for TLC, which took approximately 4.5 months, and during the 2-week LOA phase, the workload became even more demanding. Furthermore, contrary to KMOC’s expectations, there were frequent occurrences of conjunction-related tasks after entering the lunar mission orbit. The limited staffing at KMOC also had an impact on team building with MCC. During the procedures and timelines establishment for joint FD operations, KMOC faced difficulties in finalizing its own shift schedule. Consequently, the team had to work continuously without a designated shift schedule to ensure seamless collaboration with MCC. All of these factors were due to a lack of comprehensive understanding and preparation for planetary exploration mission operations as well as international collaboration.
When planning international collaborations in space exploration missions, particularly similar to the KMOC and MCC partnership, ensuring sufficient staffing for joint team building is crucial. It is important to consider personnel availability from the initial design phase of joint operation procedures and timelines, considering the specialized characteristics of both planetary exploration missions and the demanding nature of international collaboration. Additionally, allocating operational staff at the appropriate time is highly recommended to facilitate smooth joint operations. The most suitable timing for allocation would be when both entities have nearly completed their preparations, such as finishing tests and finalizing joint documents. The assigned operational staff will then undergo training using the prepared procedures and documents, actively addressing and resolving any emerging issues. By implementing these strategies, collaboration-based joint operations will be strengthened and solidified. These aspects hold great importance as they directly contribute to the overall success of the mission.
5. Conclusions
In this work, the efforts and lessons learned from the collaborative work between the Korea Aerospace Research Institute (KARI) and the National Aeronautics and Space Administration (NASA) Johnson Space Center (JSC) Flight Operations Directorate (FOD) are summarized, with the goal of achieving effective joint Fight Dynamics (FD) operations as a unified team. The dedicated efforts of Korea Pathfinder Lunar Orbiter Mission Operation Center (KMOC) and NASA JSC Mission Control Center (MCC) over the past six years have resulted in the successful insertion of Korea Pathfinder Lunar Orbiter (KPLO) into lunar orbit. Currently, KPLO is orbiting the Moon at an altitude of 100 km with a 90-degree inclination, and all payloads, including the bus system, are operating normally, achieving maximum science return.
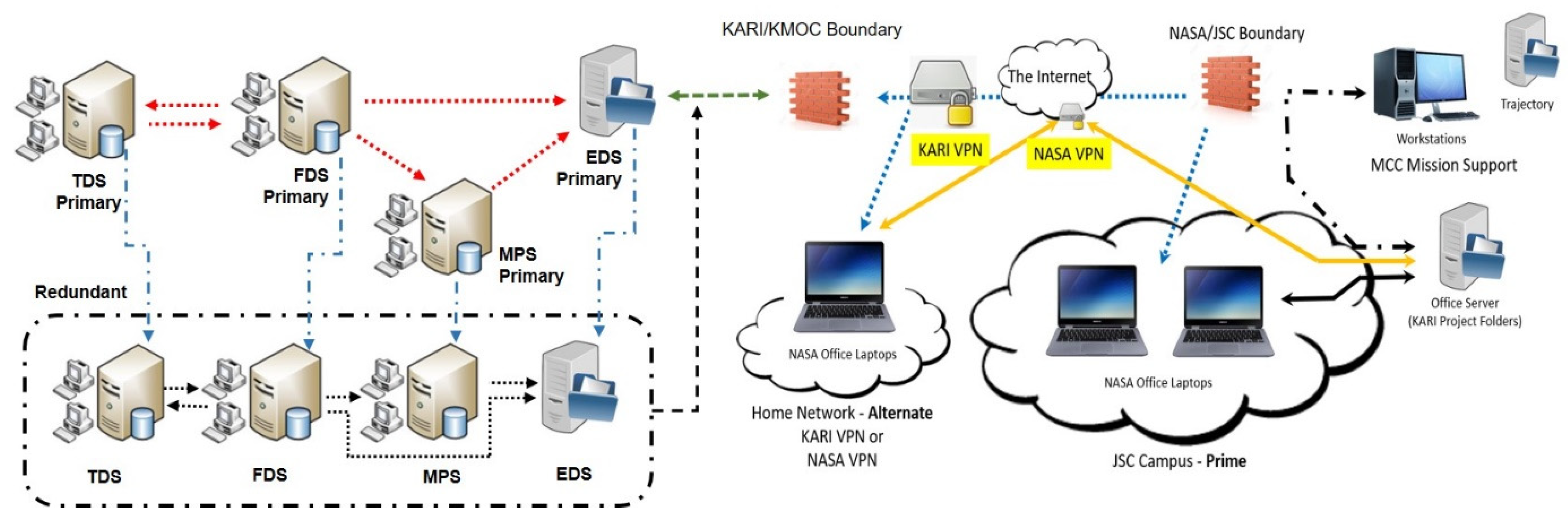
To ensure smooth and efficient collaboration between KMOC and MCC, the interfaces between the two entities were optimized for joint operations. Extensive testing and trial-and-error processes were undertaken in order to establish systematic operational procedures with clear timelines. Moreover, two comprehensive joint rehearsals were successfully conducted. These collective efforts ultimately led to the completion of the Operational Interface Procedure (OIP) document as well as other documents which served as a valuable reference during the actual flight operations.
The course of this joint work was far from smooth. In particular, the collaboration between KMOC and MCC, with its Independent Verification and Validation (IV&V) characteristics, presented numerous challenges. Through two rounds of testing, the establishment of procedures and timelines, and the execution of rehearsals, valuable insights were gained. Careful examination of numerous parameters and internal algorithms was required to ensure consistent outcomes from the FD software used by both entities. Moreover, significant efforts were made to ensure consistency in the terms used and to maximize common understandings of operational concepts. Additionally, staffing and team building posed significant obstacles, especially to KMOC, to functioning as a unified joint team. In summary, the main lesson learned from these experiences is that every aspect should be carefully considered, and dedication to the fundamentals should be maintained. While this lesson may appear self-evident and trivial, it is still an important factor that must never be disregarded in real-world collaborative endeavors.
The joint experience between KARI and NASA JSC has built mutual trust and serves as a foundation for future cooperation. Furthermore, the efforts and lessons shared in this work offer valuable insights to experts worldwide who aim to foster similar international collaborations, facilitating smoother partnerships and minimizing potential challenges.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}