
On the Possibility of Cross-Flow Vortex Cancellation by Plasma Actuators

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental and Numerical Approach
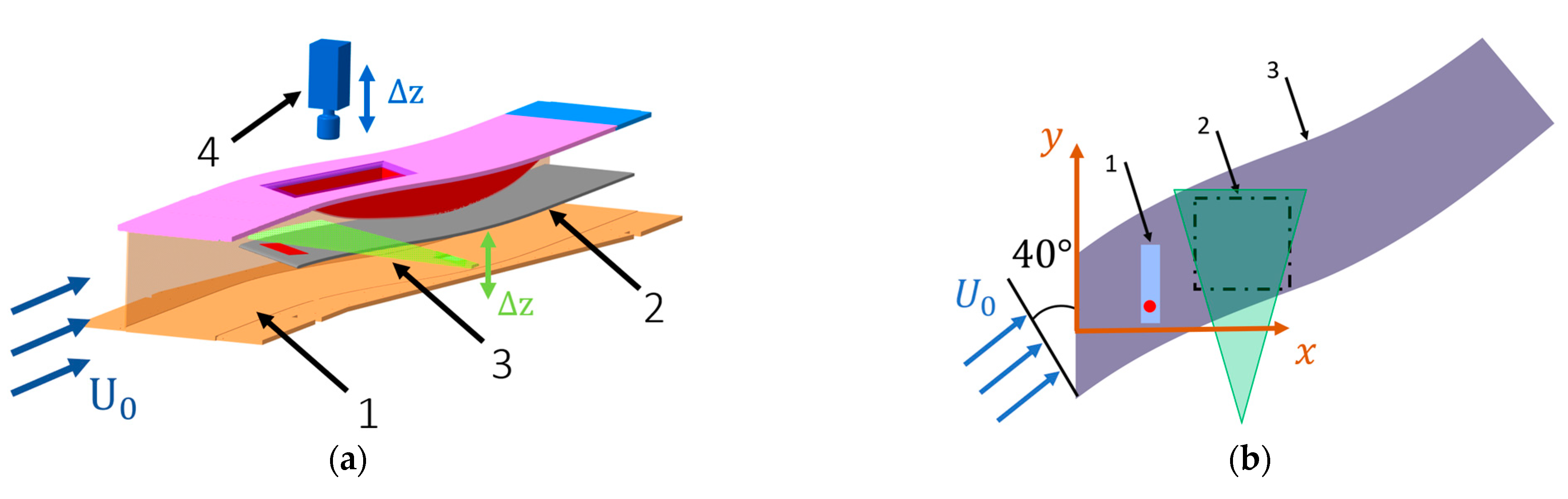
2.1. Experiment Design
2.2. Approach to the Cross-Flow Vortex Cancellation
2.3. Numerical Modeling of Cross-Flow Vortex Cancellation by DBD
2.3.1. Numerical Method
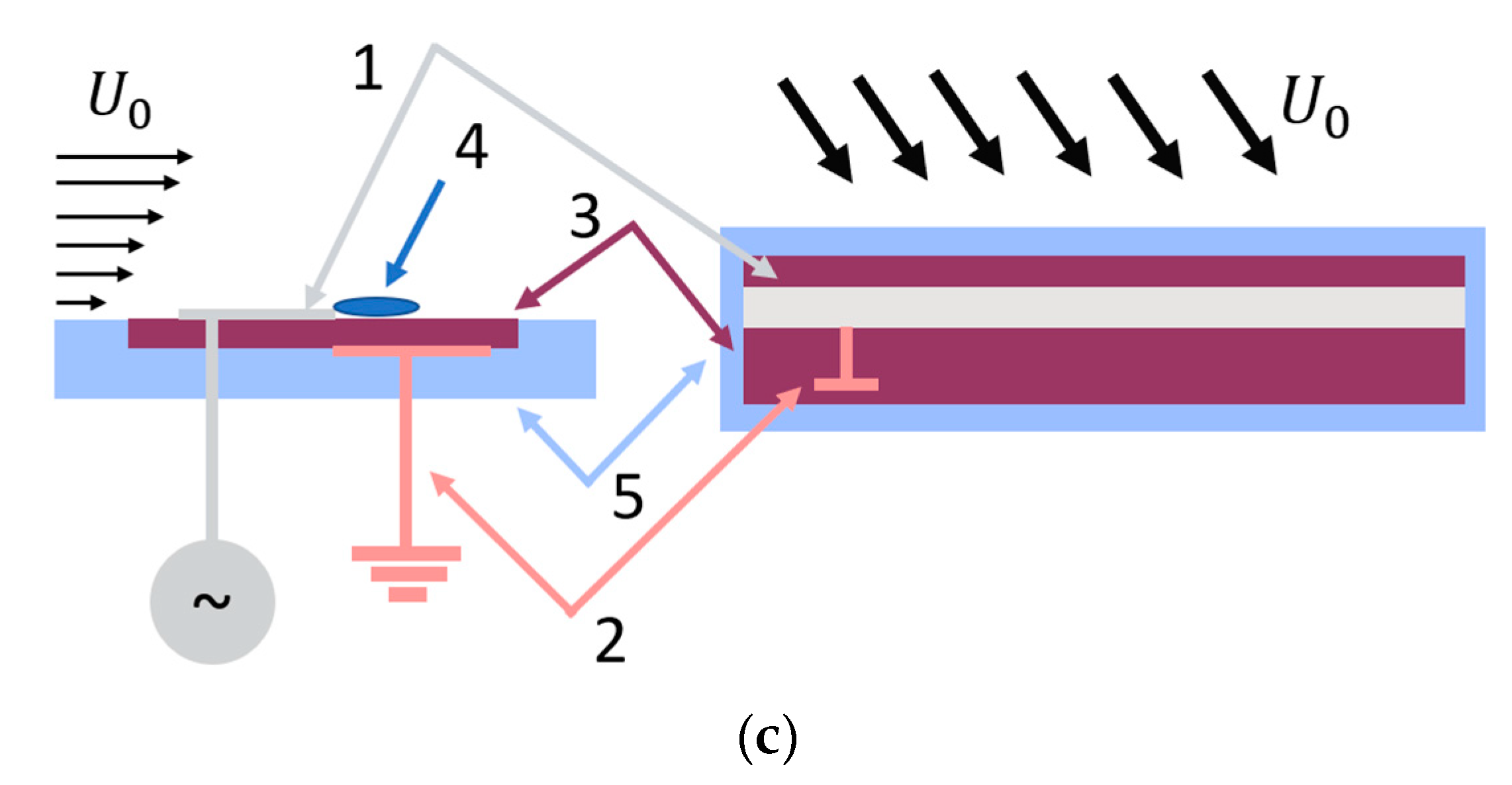
2.3.2. Actuator Model
3. Results and Discussion
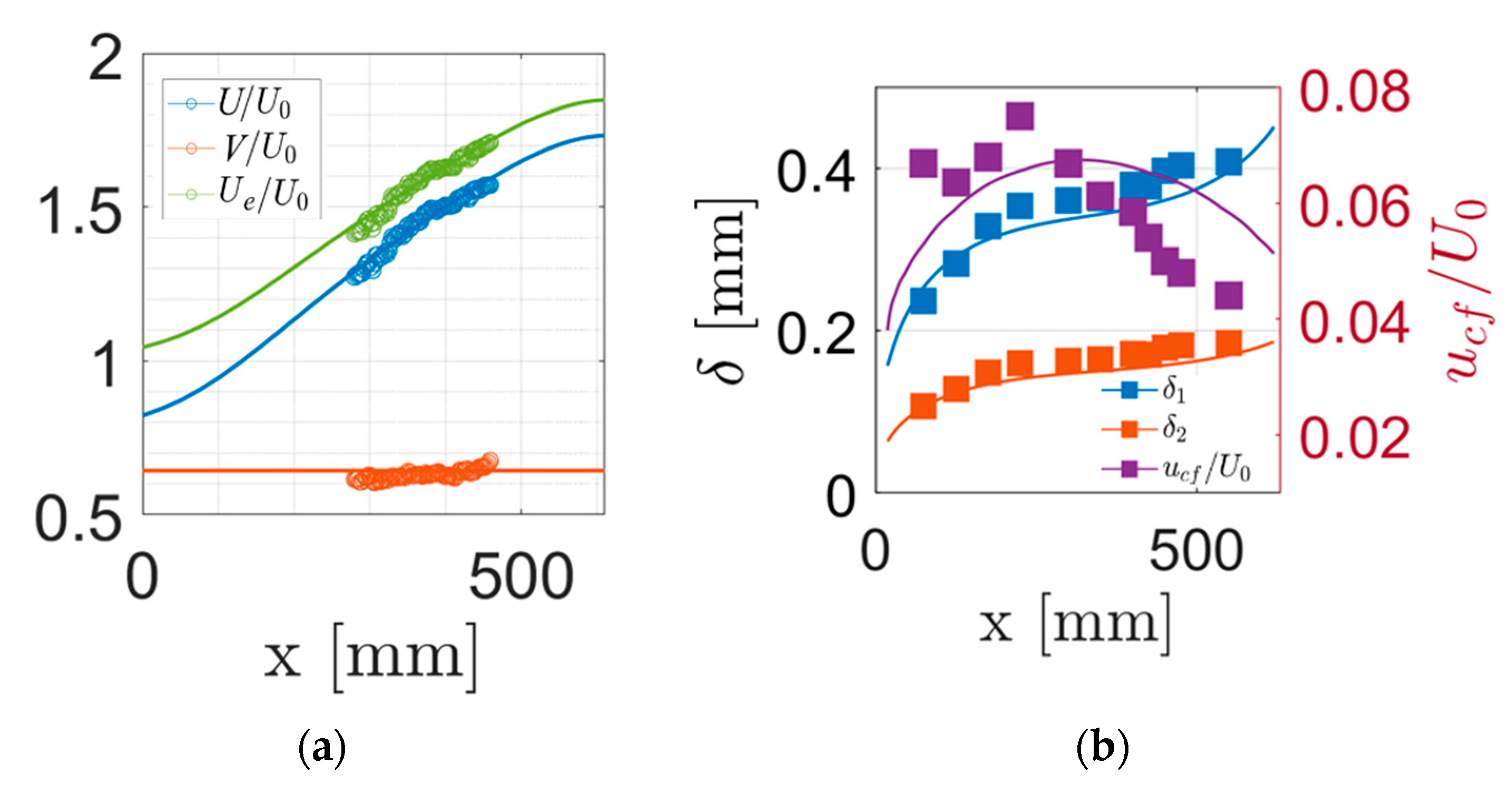
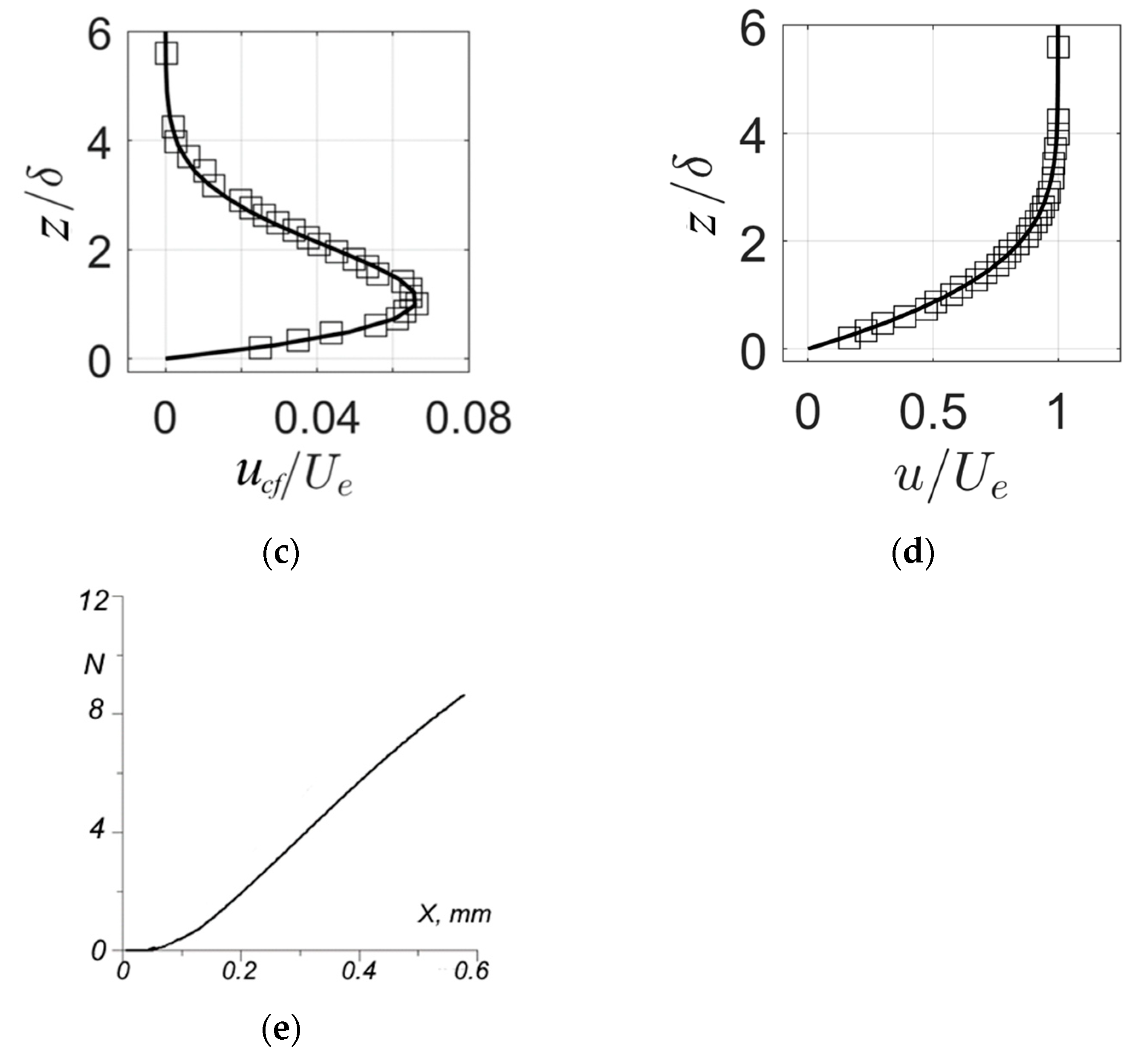
3.1. Boundary-Layer Excitation via Single Actuator Section
3.2. Modeling of Transition Control via Cross-Flow Vortex Cancellation
3.2.1. Control Simulation by Using Numerically Obtained Boundary-Layer Response
3.2.2. Control Simulation by Using Experimentally Obtained Boundary-Layer Response
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviation
| PIV | particle image velocimetry |
| CFI | cross-flow instability |
| DBD | dielectric barrier discharge |
| oncoming flow velocity | |
| Ue | velocity magnitude at the outer border of the boundary layer |
| X, Y, Z | leading edge co-ordinate system |
| U, V, W | flow velocities in (xyz) co-ordinate system |
| us, ucf | flow velocities in the boundary layer, parallel and normal to the local potential flow streamline |
| δ1, δ2 | displacement and momentum loss boundary-layer thicknesses |
| L | length of flow acceleration region, 610 mm |
| δ = (Lν/U)1/2 | reference boundary-layer thickness |
| R = (u∞L/ν)1/2 | Reynolds number |
References
- Bippes, H. Basic Experiments on Transition in Three-Dimensional Boundary Layers Dominated by Crossflow Instability. Prog. Aerosp. Sci. 1999, 35, 363–412. [Google Scholar] [CrossRef]
- Saric, W.S.; Reed, H.L.; White, E.B. Stability and transition of Three-dimensional boundary layers. Annu. Rev. Fluid Mech. 2003, 35, 413–440. [Google Scholar] [CrossRef]
- Borodulin, V.I.; Ivanov, A.V.; Kachanov, Y.S. Swept-wing boundary-layer transition at various external perturbations: Scenarios, criteria, and problems of prediction. Phys. Fluids 2017, 29, 094101. [Google Scholar] [CrossRef]
- Ustinov, M.V. Laminar-turbulent transition in boundary layers (Review). Part 1: Main types of laminar-turbulent transition in a swept-wing boundary layer. TsAGI Sci. J. 2013, 44, 1–63. [Google Scholar] [CrossRef]
- Ustinov, M.V. Laminar-turbulent transition in boundary layers (Review). Part 1: Transition prediction and methods of boundary layer laminarization. TsAGI Sci. J. 2014, 45, 851–887. [Google Scholar] [CrossRef]
- Thomas, A.S.W. The control of boundary-layer transition using a wave-superposition principle. J. Fluid Mech. 1983, 137, 233–250. [Google Scholar] [CrossRef]
- Ladd, D.M.; Hendricks, E.W. Active control of 2-D instability waves on an axisymmetric body. Exp. Fluids 1988, 6, 69–70. [Google Scholar] [CrossRef]
- Li, Y.; Gaster, M. Active control of boundary-layer instabilities. J. Fluid Mech. 2006, 550, 185–205. [Google Scholar] [CrossRef]
- Sturzebecher, D.; Nitsche, W. Active cancellation of Tollmien–Schlichting instabilities on a wing using multi-channel sensor actuator systems. Int. J. Heat Fluid Flow 2003, 24, 572–583. [Google Scholar] [CrossRef]
- Zoppini, G.; Michelis, T.; Ragni, D.; Kotsonis, M. Cancellation of crossflow instabilities through multiple discrete roughness elements forcing. Phys. Rev. Fluids 2022, 7, 123902. [Google Scholar] [CrossRef]
- Moreau, E. Airflow control by non-thermal plasma actuators. J. Phys. D Appl. Phys. 2007, 40, 605–636. [Google Scholar] [CrossRef]
- Kriegseis, J.; Simon, B.; Grundmann, S. Towards In-Flight Applications? A Review on Dielectric Barrier Discharge-Based Boundary-Layer Control. Appl. Mech. Rev. 2016, 68, 020802. [Google Scholar] [CrossRef]
- Wang, J.-J.; Choi, K.-S.; Feng, L.-H.; Jukes, T.N.; Whalley, R.D. Recent developments in DBD plasma flow control. Prog. Aerosp. Sci. 2013, 62, 52–78. [Google Scholar] [CrossRef]
- Samimy, M.; Webb, N.; Esfahani, A. Reinventing the wheel: Excitation of flow instabilities for active flow control using plasma actuators. J. Phys. D: Appl. Phys. 2019, 52, 354002. [Google Scholar] [CrossRef]
- Baranov, S.A.; Kiselev, A.F.; Kuryachii, A.P.; Sboev, D.S.; Tolkachev, S.N.; Chernyshev, S.L. Control of Cross-Flow in a Three-Dimensional Boundary Layer Using a Multidischarge Actuator System. Fluid Dyn. 2021, 56, 66–78. [Google Scholar] [CrossRef]
- Yadala, S.; Hehner, M.T.; Serpieri, J.; Benard, N.; Kotsonis, M. Plasma-Based Forcing Strategies for Control of Crossflow Instabilities. AIAA J. 2021, 59, 3406–3416. [Google Scholar] [CrossRef]
- Chernyshov, S.L.; Kuriachii, A.P.; Manuilovich, S.V.; Russianov, D.A.; Gamirullin, M.P. Theoretical Modeling of the Electrogasdynamic Method of Laminar Flow Control on a Swept Wing. In Proceedings of the 9th Congress of the International Council of Aeronautical Sciences, St. Petersburg, Russia, 7–12 September 2014. [Google Scholar]
- Kuryachii, A.P. Control of cross flow in the three-dimensional boundary layer using space-periodic body force action. Fluid Dyn. 2009, 44, 233–239. [Google Scholar] [CrossRef]
- Duchmann, A.; Simon, B.; Magin, P.; Tropea, C.; Grundmann, S. In-Flight Transition Delay with DBD Plasma Actuators. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar] [CrossRef]
- Serpieri, J.; Venkata, S.Y.; Kotsonis, M. Conditioning of cross-flow instability modes using dielectric barrier discharge plasma actuators. J. Fluid Mech. 2017, 833, 164–205. [Google Scholar] [CrossRef]
- Baranov, S.; Moralev, I.; Ustinov, M.; Sboev, D.; Tolkachev, S. Transition Control by Dielectric Barrier Discharge in a Swept Wing Boundary Layer at Elevated Free Stream Turbulence. In Proceedings of the 593 Euromech Colloqium “PLASMA-BASED ACTUATORS FOR FLOW CONTROL: RECENT DEVELOPMENTS AND FUTURE DIRECTIONS”, Delft, The Netherlands, 14–16 March 2018. [Google Scholar]
- Choi, K.-S.; Kim, J.-H. Plasma virtual roughness elements for cross-flow instability control. Exp. Fluids 2018, 59, 1–15. [Google Scholar] [CrossRef]
- Moralev, I.; Ustinov, M.; Kotvitskii, A.; Popov, I.; Selivonin, I.; Kazanskii, P. Stochastic disturbances, induced by plasma actuator in a flat plate boundary layer. Phys. Fluids 2022, 34, 054117. [Google Scholar] [CrossRef]
- Moralev, I.; Selivonin, I.; Ustinov, M. On the stochastic forcing of the boundary layer by plasma actuators. Exp. Fluids 2019, 60, 177. [Google Scholar] [CrossRef]
- Baranov, S.A.; Kiselev, A.P.; Moralev, I.A.; Sboev, D.S.; Tolkachev, S.N.; Chernyshev, S.L. Transition control in a three-dimensional boundary layer at elevated free stream turbulence using dielectric barrier discharge. Dokl. Phys. 2019, 486, 668–672, In Russian. [Google Scholar] [CrossRef]
- Dörr, P.; Kloker, M. Transition control in a three-dimensional boundary layer by direct attenuation of nonlinear crossflow vortices using plasma actuators. Int. J. Heat Fluid Flow 2016, 61, 449–465. [Google Scholar] [CrossRef]
- Moralev, I.; Selivonin, I.; Tatarenkova, D.; Firsov, A.; Preobrazhenskii, D. Damping of the longitudinal streak in the boundary layer by ‘plasma panel’ actuator. J. Phys. D Appl. Phys. 2019, 52, 304003. [Google Scholar] [CrossRef]
- Manuilovich, S.V. Bulk forces removing the cross-flow in the laminar boundary layer. Fluid Dyn. 2000, 15, 387–397. [Google Scholar]
- Selivonin, I.; Lazukin, A.; Moralev, I.; Krivov, S. Effect of electrode degradation on the electrical characteristics of surface dielectric barrier discharge. Plasma Sources Sci. Technol. 2018, 27, 085003. [Google Scholar] [CrossRef]
- Moralev, I.; Bityurin, V.; Firsov, A.; Sherbakova, V.; Selivonin, I.; Maxim, U. Localized micro-discharges group dielectric barrier discharge vortex generators: Disturbances source for active transition control. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 42–57. [Google Scholar] [CrossRef]
- Bertolotti, F.P.; Herbert, T.; Spalart, P.R. Linear and non-linear stability of the Blasius boundary layer. J. Fluid Mech. 1992, 242, 441–474. [Google Scholar] [CrossRef]
- Li, F.; Malik, M.R. On the Nature of PSE Approximation. Theor. Comput. Fluid Dyn. 1996, 8, 253–273. [Google Scholar] [CrossRef]
- Airiau, C. Non-Parallel Acoustic Receptivity of a Blasius Boundary Layer Using an Adjoint Approach. Flow, Turbul. Combust. 2000, 65, 347–367. [Google Scholar] [CrossRef]
- Yadala, S.; Hehner, M.T.; Serpieri, J.; Benard, N.; Dörr, P.C.; Kloker, M.J.; Kotsonis, M. Experimental control of swept-wing transition through base-flow modification by plasma actuators. J. Fluid Mech. 2018, 844, R2. [Google Scholar] [CrossRef]
- Hui, W.; Zhang, H.; Wang, J.; Meng, X.; Li, H. Heat transfer characteristics of plasma actuation in different boundary-layer flows. Phys. Fluids 2022, 34, 034110. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdullaev, A.; Kotvitskii, A.; Moralev, I.; Ustinov, M. On the Possibility of Cross-Flow Vortex Cancellation by Plasma Actuators. Aerospace 2023, 10, 469. https://doi.org/10.3390/aerospace10050469
Abdullaev A, Kotvitskii A, Moralev I, Ustinov M. On the Possibility of Cross-Flow Vortex Cancellation by Plasma Actuators. Aerospace. 2023; 10(5):469. https://doi.org/10.3390/aerospace10050469
Chicago/Turabian StyleAbdullaev, Amir, Alexander Kotvitskii, Ivan Moralev, and Maxim Ustinov. 2023. "On the Possibility of Cross-Flow Vortex Cancellation by Plasma Actuators" Aerospace 10, no. 5: 469. https://doi.org/10.3390/aerospace10050469