3.1. Design of Lunar Swingby
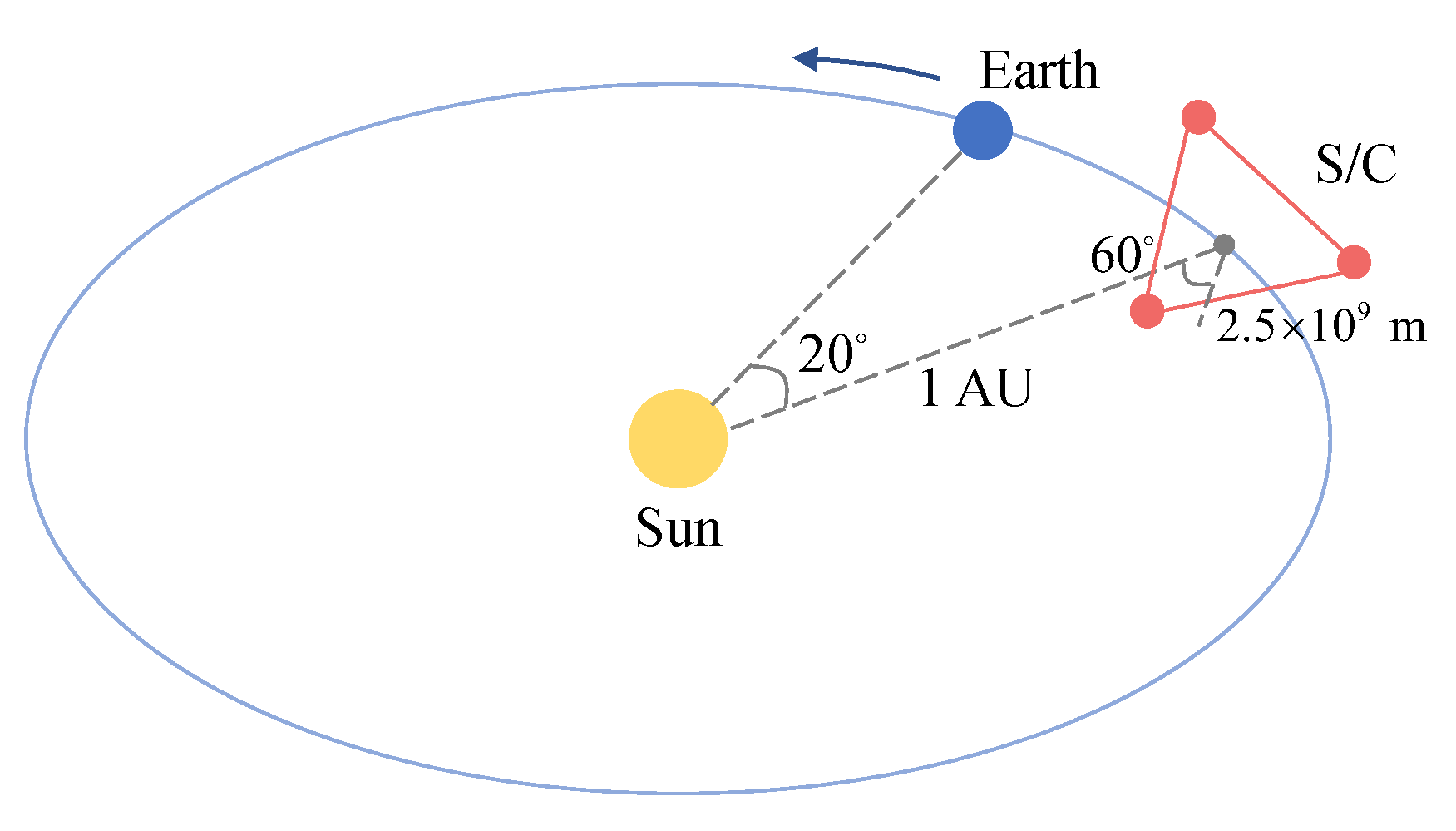
Limited to the launch vehicle capacity and the energy requirement for later science operation, the GW detection mission desires an ingenious transfer design with little transfer energy. Swingby is usually considered to reduce the velocity increment or transfer time. The orbit of the S/C is designed to pass near a planet and use its gravitation to increase the energy, change the inclination, reduce the mission time, and achieve other purposes. In this work, the lunar swingby is designed to reduce the velocity increment of transfer.
In the preliminary design, the swingby is modeled as an instantaneous impulse [
40]. The differences in the positions and time moments immediately before and after the swingby are not considered, and the corresponding positions are consistent with the position of the swingby celestial body at the swingby time moment. In the lunar swingby, let us denote the time moments immediately before and after the swingby by
and
, respectively, and the position vectors of the S/C with respect to the Earth in the J2000 ECI frame before and after the swingby by
and
, respectively. The position vector of the Moon with respect to the Earth in the J2000 ECI frame at the time moment of the lunar swingby is denoted by
. The following relationships exist:
The relative velocity between the S/C and the swingby celestial body is called hyperbolic excess speed and is denoted by
. Suppose that
denotes the hyperbolic excess speed when entering the lunar SOI and
denotes the hyperbolic excess speed when leaving the lunar SOI. They hold the forms:
where
and
denote the velocity vectors of the S/C with respect to the Earth in the J2000 ECI frame immediately before and after the swingby, respectively, and
denotes the position vector of the Moon with respect to the Earth in the J2000 ECI frame at the time moment of lunar swingby.
When the S/C is within the lunar SOI, only the lunar gravitation is considered, which means that the orbit of the S/C in the SOI is a hyperbolic curve. The turn angle of the hyperbolic curve,
, is determined by the swingby radius
, the magnitude of hyperbolic excess velocity
, and the gravitational constant of the Moon
:
The hyperbolic excess speed
lies on a circular cone with
as the axis and
as the top angle, and its magnitude is equal to
. The coordinate system
is established with the Moon as the center, as shown in
Figure 3, where the
-axis is parallel to
, the
-axis is parallel to the normal of the plane formed by
and
, and the
-axis,
-axis and
-axis form a right-handed coordinate system.
The unit vectors of the coordinate axes are denoted by
,
, and
:
Assuming that no active orbital maneuver is applied during the swingby, the hyperbolic excess speed
immediately after the lunar swingby and the velocity increment
obtained from the swingby are given by:
where
denotes the angle between the projection of
in the
plane and the
-axis, with values in the range
. When
,
, and
are determined, the velocity increment of the swingby,
, and the hyperbolic excess speed after the swingby,
, can be obtained. In general, it is necessary to apply a maneuver after swingby to ensure reaching the next target.
The above impulsive model of swingby is an approximation, and it is suitable for the preliminary design of orbit. When the perturbations before swingby and the lunar SOI are considered, the initial state needs to be corrected if the effect of swingby in the initial design is to be achieved. In lunar and interplanetary trajectories, the B-plane coordinate system and B-plane parameters (notated as
and
) are efficient in describing the arrival conditions at a target celestial body. The B-plane parameters are nearly linear functions of the initial orbital conditions [
41].
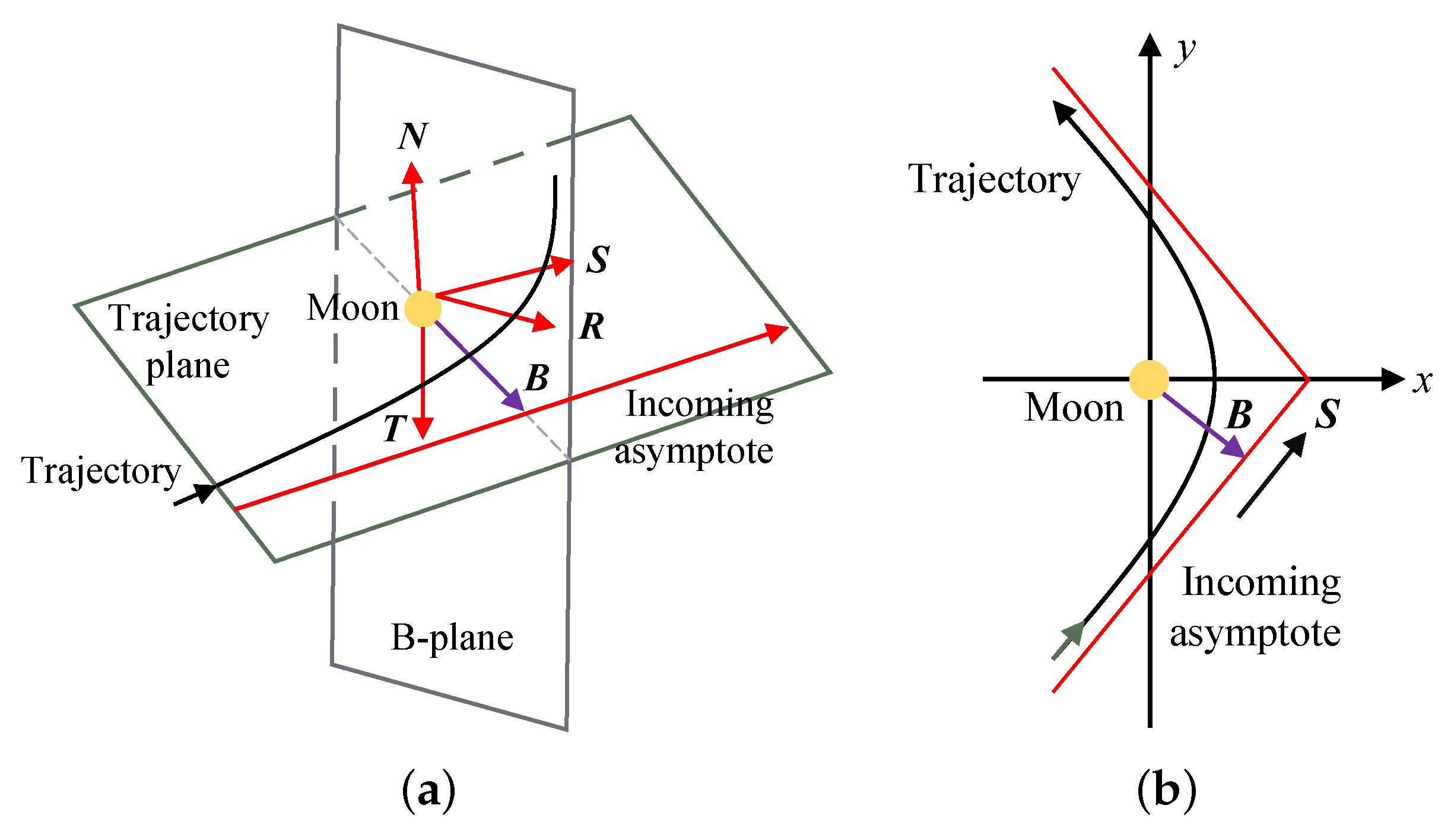
In the case of the lunar swingby, the B-plane is defined as the plane past the lunar center and perpendicular to the incoming asymptote of the S/C, and the vector
points from the lunar center to the intersection of the B-plane and the incoming asymptote, as shown in
Figure 4. The direction normal to the lunar orbit is adopted as the reference direction, denoted by
. The B-plane coordinate system is described by three orthogonal unit vectors
,
, and
, as shown in
Figure 4. They are defined as:
The B-plane parameters are the projections of
on
and
:
The target B-plane parameters denoted by
and
are calculated from the hyperbolic excess speed
and
in the preliminary design, and the relationship between them satisfies Equations (
20)–(
24). The normal unit vector of the hyperbolic orbital plane is:
The energy of the hyperbolic orbit,
E, satisfies [
42]:
where
denotes the position vector with respect to the Moon when entering the lunar SOI, and
denotes the semi-major axis of the hyperbolic orbit. In fact,
is close to 0. Therefore, the semi-major axis
of the hyperbolic orbit is approximated by the following equation:
The magnitude of the vector
is equal to the magnitude of the semi-imaginary axis of the hyperbolic orbit,
:
where
is calculated by Equation (
21). The target vector
is expressed as:
Then, the unit vectors of the B-plane coordinate system
,
, and
are calculated by Equation (
25). The target B-plane parameters
and
are calculated by replacing
with
in Equation (
26).
The actual B-plane parameters are calculated according to the position vector
and velocity vector
with respect to the Moon when entering the lunar SOI in the real dynamical model. The unit normal vector
of the actual orbital plane and eccentricity vector
are given by [
42]:
Then, the vector
is given by:
where
. The semi-major axis
is given by:
The magnitude of the actual vector,
, is equal to the magnitude of the semi-imaginary axis of the hyperbolic orbit,
:
The actual vector
is expressed as:
The unit vectors of the B-plane coordinate system,
and
, are calculated by Equation (
25), while
is calculated by Equation (
33). Then, the actual B-plane parameters,
and
, are calculated by replacing
with
in Equation (
26).
The B-plane parameters
and
have been successfully applied to the design of lunar swingby trajectories [
43]. The responses of
and
to the initial conditions are approximately linear, and the changes of
and
with respect to the initial conditions (the partial derivatives) are of the same order of magnitude. In this work, two components of the departure velocity vector, denoted by
and
, at the initial time moment
are chosen as design variables, and the target B-plane parameters are constrained to complete the swingby correction, i.e., to find the solution of the following equation:
3.2. Adaptive Model Continuation Technique
The solution of the transfer design in complex dynamical models is obtained based on the solution in simplified dynamical models. This process is called model continuation. This work involves the model continuation that iterates multiple optimal solutions from the two-body models to the simplified high-fidelity models.
The solutions in the two-body models provide the initial values of local optimization in the simplified high-fidelity models. However, the differences between the two kinds of models are significant. If the local optimization is directly performed in the complex models, it will suffer from the problem of difficult convergence. Even if the convergence result is occasionally obtained, it will deviate from the initial optimal point. Therefore, an adaptive model continuation technique is proposed to overcome these difficulties. The perturbation accelerations are sequenced according to their order of magnitude from largest to smallest and gradually added to the dynamical models. When the
ith perturbation should be added, the dynamic equation of the S/C is:
where
denotes the acceleration caused by the central body,
and
the perturbation accelerations, and
the model continuation parameter, which gradually increases from 0 to 1. The convergent result is considered as the initial value for the next optimization with the increase of
.
Theoretically, the solution in the complex models can be obtained based on the solution in the simplified models by model continuation if the parameter
increases slowly enough. However, a too small step size that increases the continuation parameter brings redundancy in computational times. Meanwhile, the appropriate step size depends on the strength of the perturbation. Even for the same perturbation, the appropriate step size may change with the continuation parameter. It will show by the numerical simulation of model continuation that when increasing
with constant step size, convergence difficulty occurs sometimes. If the problem is solved by further reducing the constant step size, it may cause a waste of computational resources. Therefore, the model continuation technique with an adaptive step size variation is proposed, and the pseudocode is shown in Algorithm 1.
| Algorithm 1: Adaptive Model Continuation Technique |
![Aerospace 10 00018 i001]() |
The idea of the adaptive model continuation technique is as follows. The continuation parameter is increased by step size d. For the ith perturbation, the parameters are first given: the initial step size , decline rate , growth rate , convergence judgment parameter c, and calculation times . The optimization problem with a series of is solved in turn, where , and is equal to the value of in the last convergence of the optimization. The optimization result corresponding to is adopted as the initial value for the current optimization, denoted by . After one step of local optimization, judge whether it converges according to the relative error between the old and new indexes. This optimization is considered converged if the relative error is less than the given parameter c. If it converges, , , and J are updated. Whether to increase the step size d is judged according to the value , which records the times of local optimization from the last convergence to this convergence. If the current local optimization does not converge, the step size d is reduced, and is calculated again. Then, the optimization problem is solved as before.
3.3. Summary of Design Process
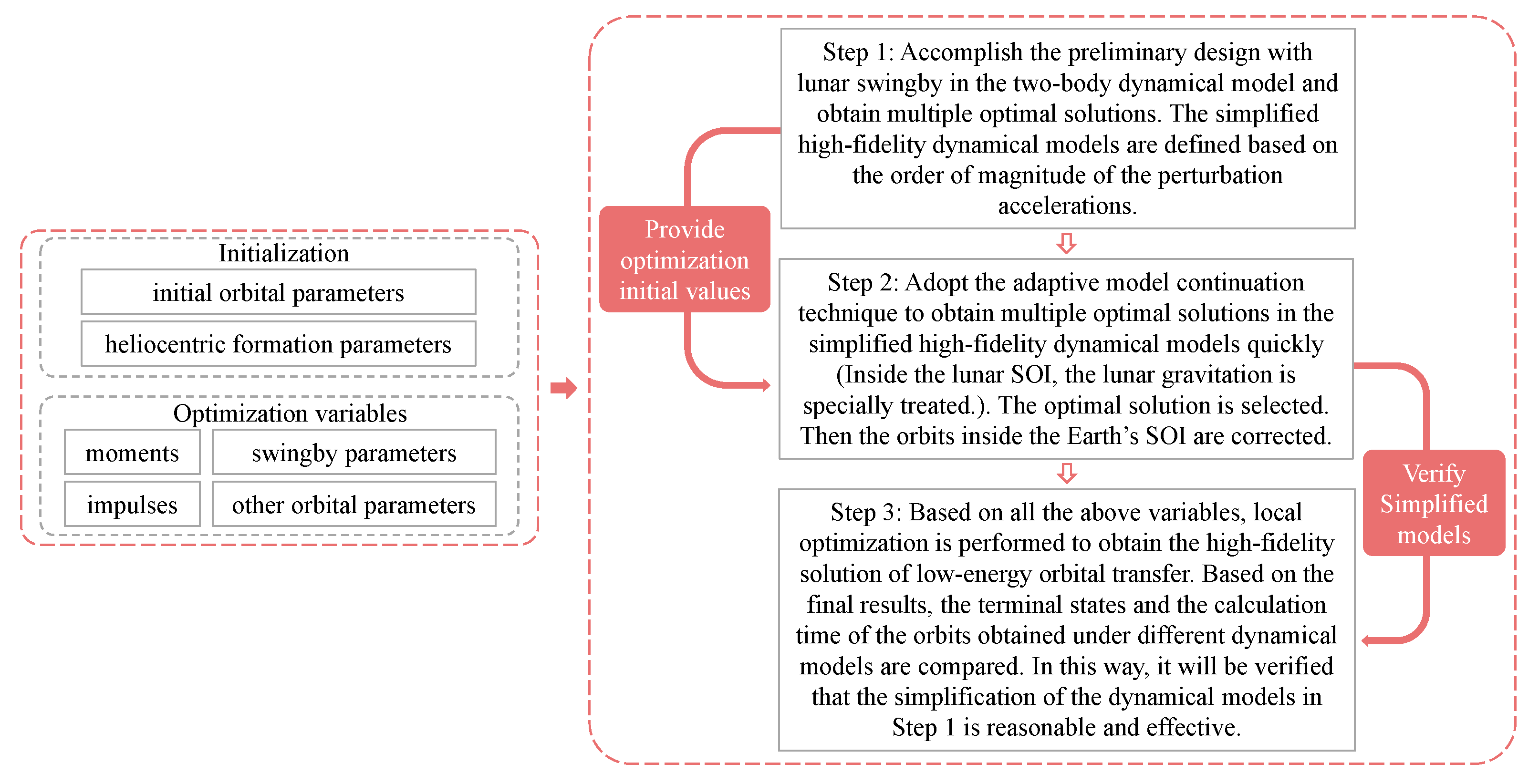
A summary of the design process is presented in a flow chart, as shown in
Figure 5. The initial and target orbital parameters are determined based on the existing studies on heliocentric formation. The optimization variables are classified into four classes: time moments, impulses, swingby parameters, and other orbital parameters. The entire design approach consists of three steps.
Step 1: Preliminary design of the transfer orbit in the two-body models. To improve the probability of finding the global optimal solution, the optimization problem is solved in the two-body models first. In these models, the computational efficiency can be greatly improved by using analytic orbital theory and the well-established method of solving the Lambert’s problem [
44]. The swingby is equated to an instantaneous impulse and is characterized by two design parameters. The design with the minimum number of impulses is considered first, and then the number of impulses is increased and examined whether the results are better with limited computational resources and acceptable computational times. The solutions are saved for Step 2, and the simplified high-fidelity models are defined based on the order of magnitude of the perturbation accelerations.
The patched-conic approximation is generally applied in the preliminary design for complex trajectory optimization problems. In the patched-conic model, the dynamic environment in this work is assumed to consist of three independent gravitational fields associated with the Earth, Moon, and Sun, respectively, and separated by the Earth’s SOI and the lunar SOI. The orbit of the S/C in a certain SOI is a conic curve without perturbations. When the spacecraft arrives at the SOI, it is necessary to perform the translations expressed by Equation (
5) to ensure that the orbit is continuous across the SOI. In the two-body models, if the states of the S/C at the time moment
and time moment
are given, the velocity increment of the transfer between the two states can be obtained by solving the Lambert’s problem.
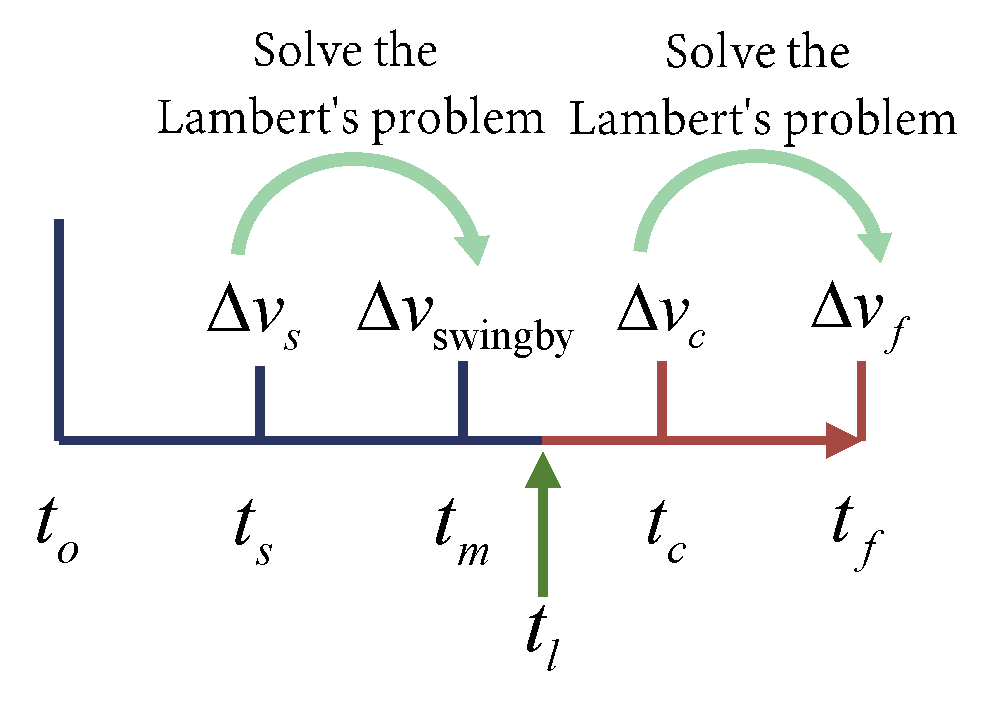
The minimum number of impulses is first applied to achieve lunar swingby and then to rendezvous with the center of the constellation, and an optimization problem with eight variables needs to be solved. Let us denote the start time of the design mission by
, the start time of the transfer by
, the time moment of the lunar swingby by
, and the end time of the transfer by
. Suppose the S/C leaves the Earth’s SOI at the time moment
. The eight optimization variables are as follows: the duration from
to
, denoted by
, the duration from
to
, denoted by
, the duration from
to
, denoted by
, the lunar swingby altitude and angle, denoted by
and
, respectively, the RAAN of the initial GTO, denoted by
, and its true anomaly at the time moment
, denoted by
f, and the scale from 0 to 1 characterizing the time moment of the orbital correction maneuver between
and
, denoted by
. The time moment of the orbital correction maneuver denoted by
is expressed by:
The impulses are applied at
,
, and
, and their magnitude are denoted by
,
, and
, respectively. They are obtained by solving the Lambert’s problem with different revolutions and selecting the solution with the smallest velocity increment. The objective function to be minimized is:
In addition to the initial and final states, the constraints include: (1) The spacecraft should fly by the Moon at the time moment
; (2) The total transfer duration should be less than the time limit
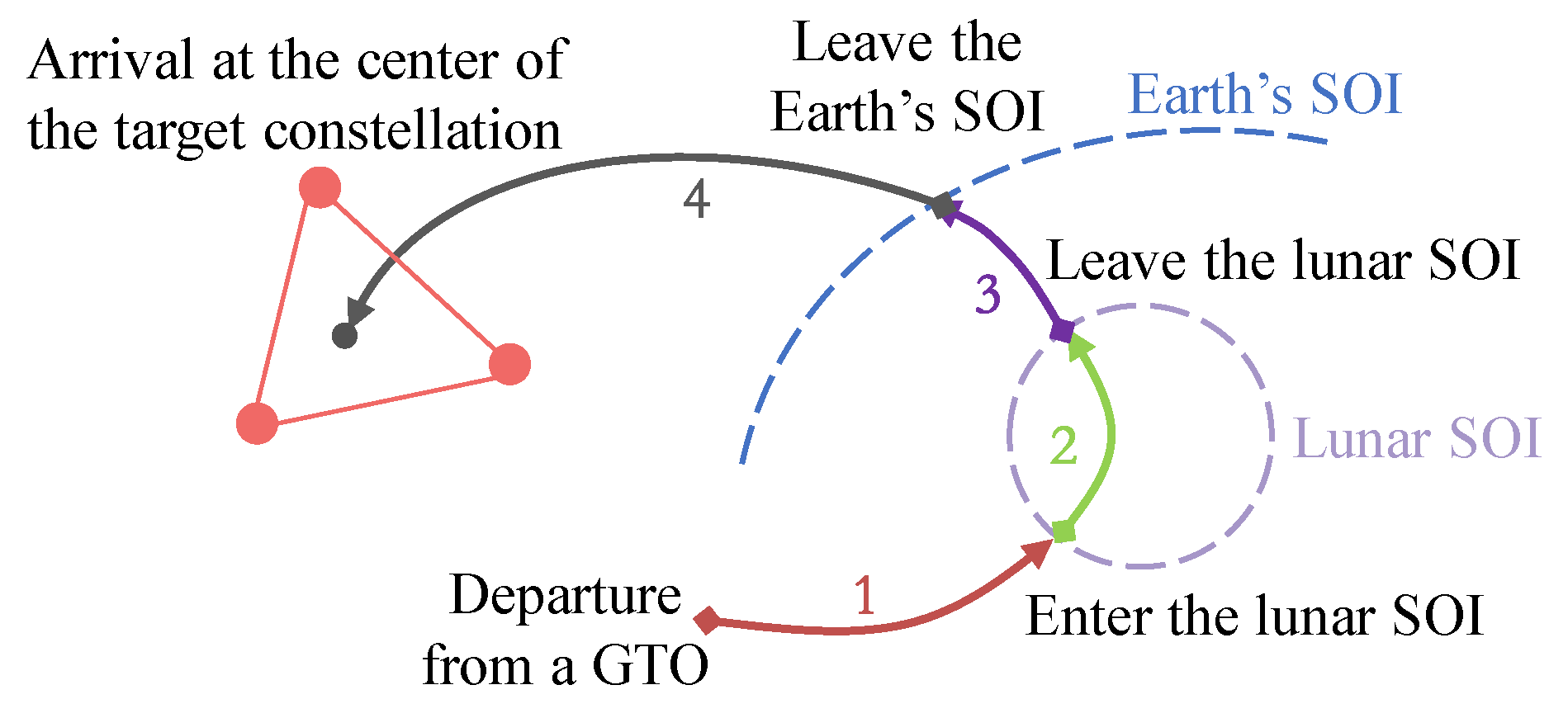
. The transfer process of the S/C is shown in
Figure 6. The blue part is the geocentric orbits, and the red is the heliocentric orbits. The translations from the J2000 ECI frame to the HERF are completed at the boundary of the Earth’s SOI at the time moment
, which are expressed by Equation (
5). The equations of motion of the S/C changes from Equation (
9) to Equation (
17) without perturbations. The orbits with the time intervals from
to
and
to
are obtained by solving the Lambert’s problem, and the remaining orbits are obtained by calculating the equations of motion under the two-body models.
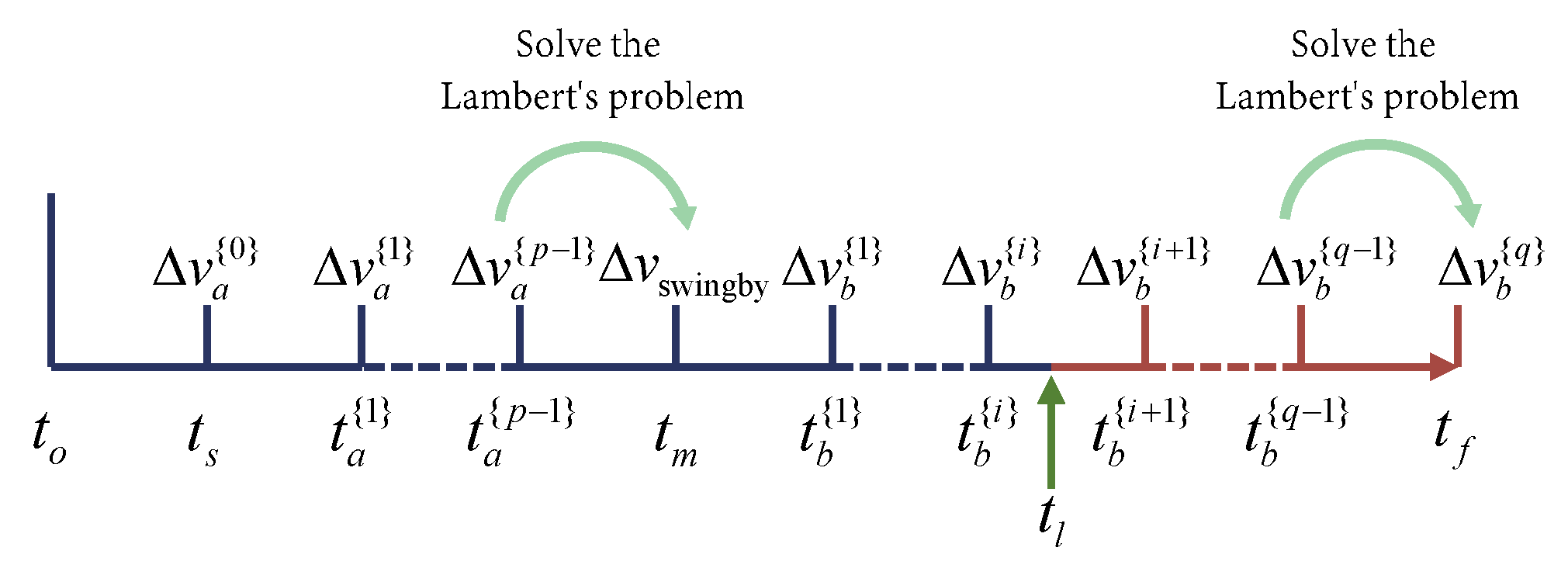
Based on the above calculations, the multi-impulse transfer model will be attempted next, as shown in
Figure 7. The number of impulses applied from
to
is
, and the number of impulses applied from
to
is
. Compared with the minimum impulse number transfer model, some optimization variables are added including:
, ⋯,
,
, ⋯,
,
, ⋯,
,
, ⋯, and
. The transfer orbits from
to
and from
to
are obtained by solving the Lambert’s problem.
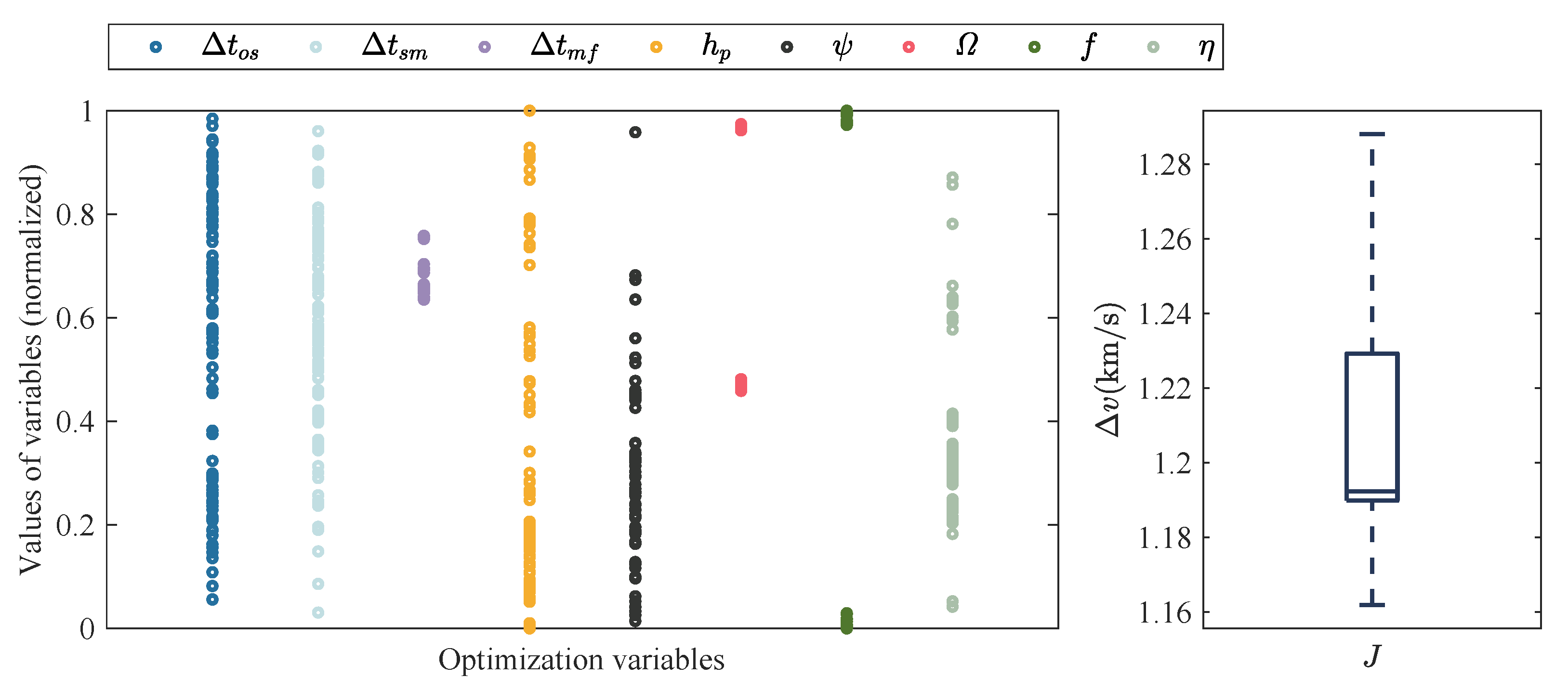
The subsequent numerical experiments will illustrate that the transfer with a total of three maneuvers, as shown in
Figure 6, is sufficient in this study. The optimizations are repeated
times in Step 1 to obtain
optimal solutions.
For the high-fidelity models, some of the perturbations are too small to have a discernible effect on the orbit. While the other perturbations must be considered; otherwise, they may lead to significant errors. Therefore, to improve the computational efficiency and keep a small terminal error, it is necessary to retain the perturbations that significantly impact the orbit and ignore those with less impact. Based on the segments of transfer orbit designed in the two-body models, the positions and velocities at multiple discrete time moments on the transfer orbit are obtained. The perturbation accelerations counted into the high-fidelity models of the geocentric and heliocentric orbits are calculated. After normalizing the perturbation accelerations by the central celestial body gravitation acceleration, the simplified high-fidelity models are drawn according to the orders of magnitude and their influences on the terminal states. The final low-energy transfer orbit is refined in these simplified high-fidelity models.
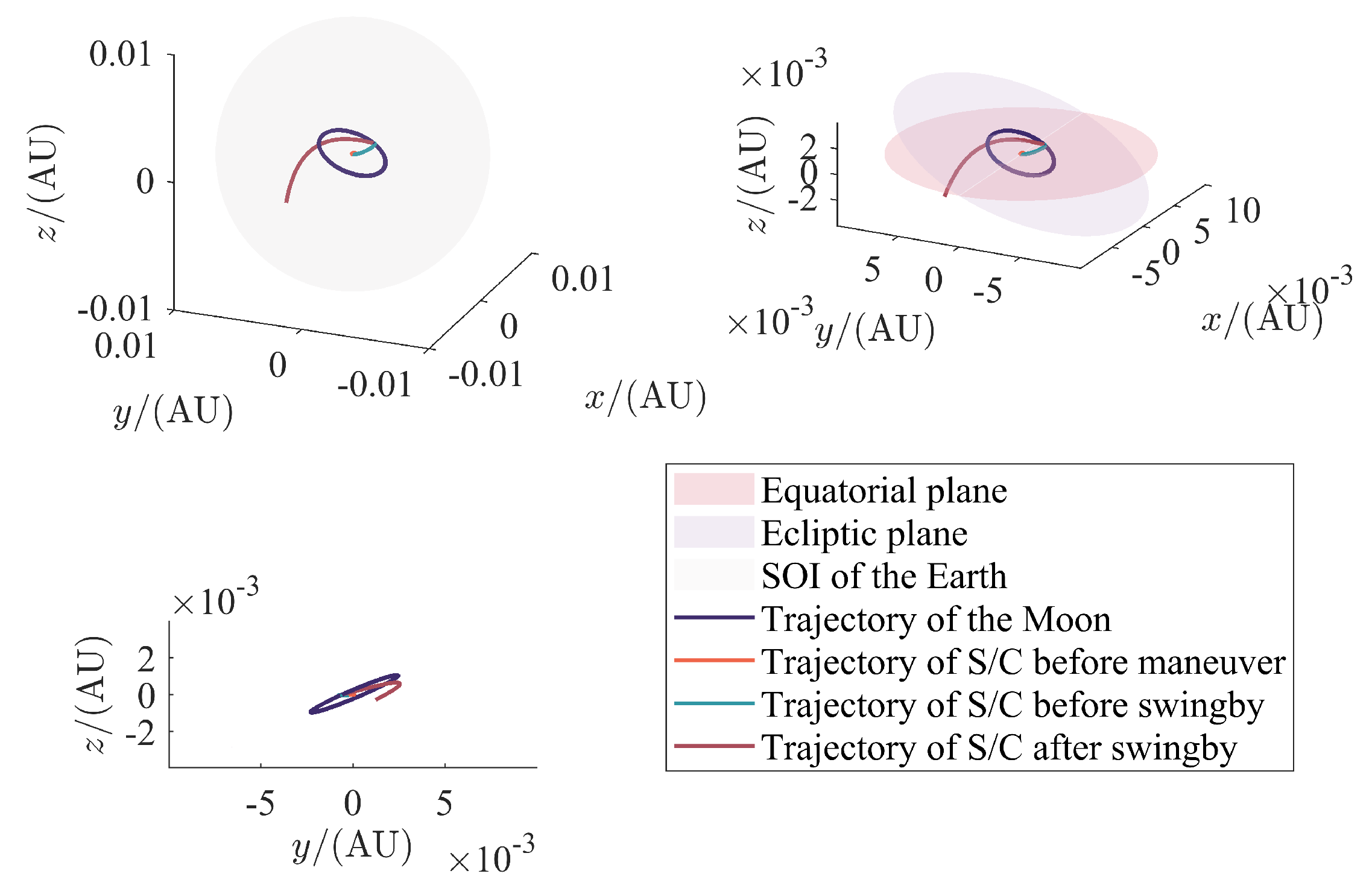
Step 2: Model continuation and swingby correction. This step utilizes the results of Step 1. The optimal solutions are iterated from the two-body models to the simplified high-fidelity models by the adaptive model continuation technique. The swingby process is specially treated and corrected to obtain approximate orbits in the lunar SOI. Then, the optimal solution among them is picked out. The space size of the lunar SOI and the simplified high-fidelity model of the selenocentric orbits are considered. We maintain the heliocentric orbit unchanged and correct the geocentric orbit. The departure velocity from the GTO is adjusted to shoot the target B-plane parameters. After leaving the lunar SOI, an impulse is added to satisfy the following position constraint at the Earth’s SOI. Finally, another impulse is added at the Earth’s SOI to meet the velocity constraint. In this way, the correction of the geocentric orbit is completed. The details are as follows.
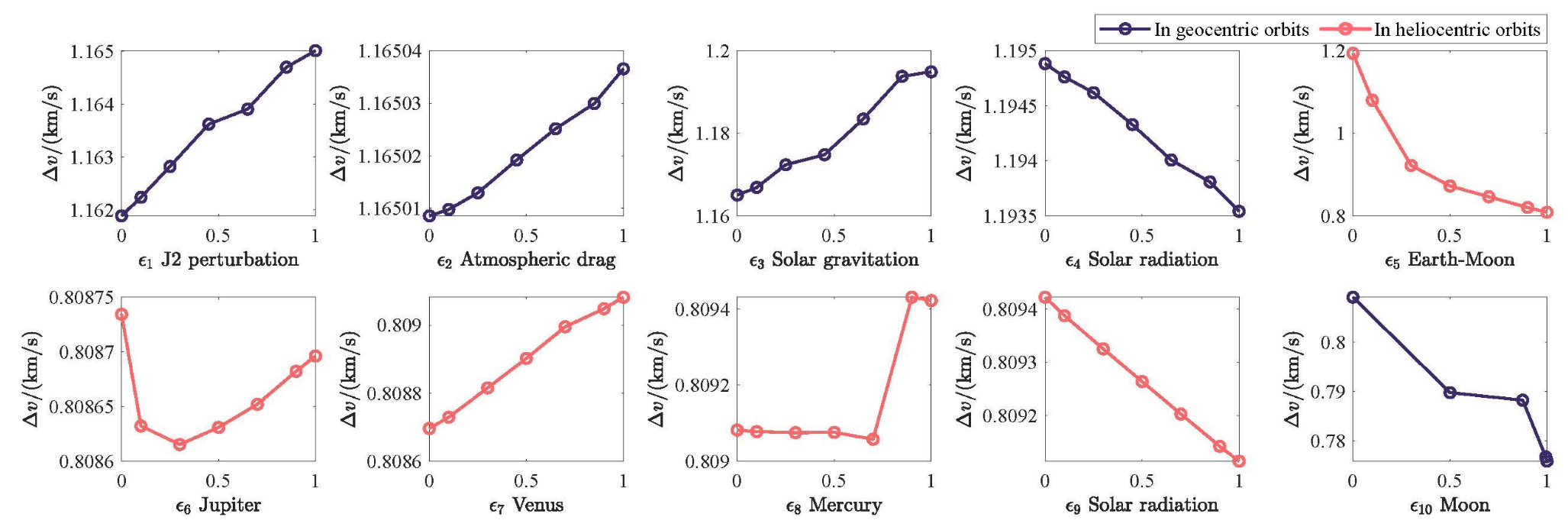
Substep 1: The optimal solutions are iterated from the two-body models to the approximate simplified high-fidelity models by the adaptive model continuation technique. The lunar gravitation perturbation for the geocentric orbits is still not considered. The lunar swingby is treated as an instantaneous impulse. Each step of the model continuation, corresponding to a change in the model continuation parameter , solves an optimization problem using a local optimization algorithm. This optimization problem has fourteen variables (include the components of vector variables) as follows: the duration from to , denoted by , the duration from to , denoted by , the duration from to , denoted by , the lunar swingby altitude and angle, denoted by and , respectively, the RAAN of the initial GTO, denoted by , its true anomaly at the time moment , denoted by f, the scale from 0 to 1 characterizing the time moment of the orbital correction maneuver between and , denoted by , three components of the impulse at the time moment , and three components of the impulse at the time moment . In the optimization problem, the constraints to be satisfied and the objective function are the same as in the preliminary design. However, since the solution of the two-point boundary-value problem considering the perturbations cannot be obtained by directly solving the Lambert’s problem, the residuals of the position constraints at and are added to the objective function as penalty terms. The order of model continuation that adds the perturbations in turn into the dynamical models is the perturbation of the Earth, atmospheric drag, solar gravitation, and solar radiation for the geocentric orbits, and the gravitation of the Earth–Moon system, Jupiter, Venus, and Mercury, and the solar radiation for the heliocentric orbits.
Substep 2: The space size of the lunar SOI is considered, and the lunar gravitation is gradually added to the dynamical model for the geocentric orbits by gradually increasing the continuation parameter. There is a special treatment inside the lunar SOI [
45]. When the S/C flies inside the lunar SOI, the lunar gravitation is set to 0. The S/C flies by the Moon at the time moment
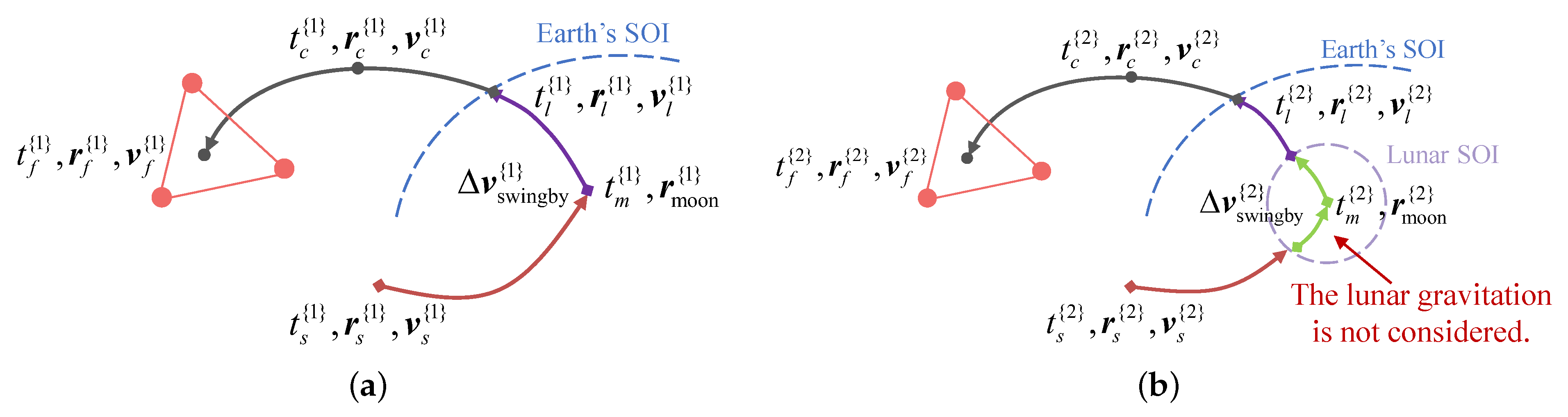
under the influence of the Earth’s gravitation and other perturbations. At this time moment, the lunar swingby is still equivalent to an instantaneous impulse. Note that the design result of Substep 1 is regarded as the initial value of the optimization problem corresponding to Substep 2. The difference between Substep 1 and Substep 2 is only in the dynamical models. The variables, constraints, and objective function in this optimization problem are the same as described in the immediately preceding paragraph. A schematic diagram of Substeps 1 and 2 is shown in
Figure 8, where
t,
, and
denote the time moments, position vectors, and velocity vectors, respectively, and the subscripts
s,
m,
l,
c, and
f represent the time moments of the departure from the GTO, the flyby of the Moon, the departure from the Earth’s SOI, the orbital correction, and the arrival at the target position, respectively. The superscripts {1} and {2} are used in subfigures (a) and (b) to distinguish the results of Substeps 1 and 2, respectively.
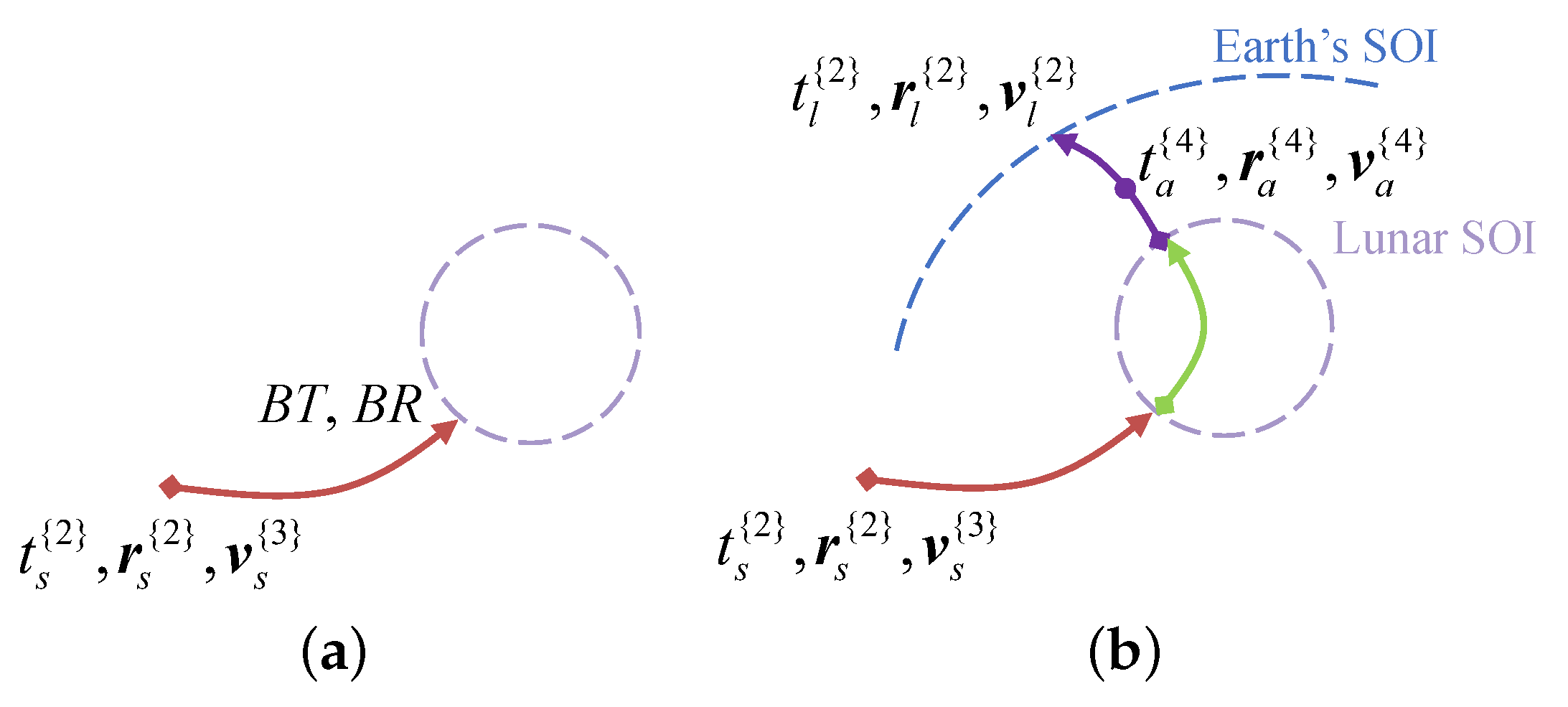
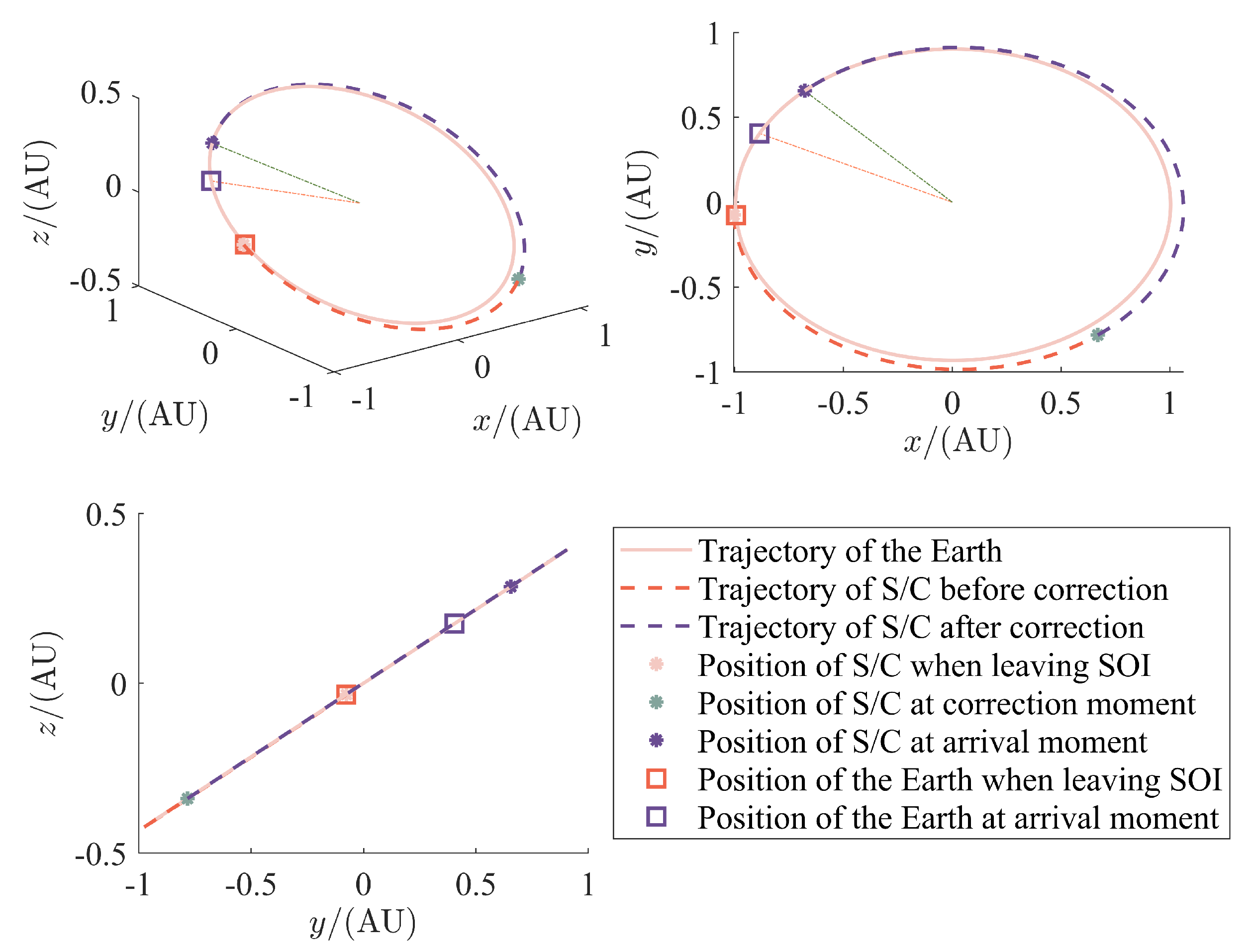
Substep 3: The optimal solution among
solutions in Substep 2 is picked out to complete the subsequent design. We maintain the heliocentric orbit unchanged and correct the geocentric orbit. This means that the time moment of arrival at the Earth’s SOI and the corresponding position and velocity remain the same as the design result of Substep 2. In the above substeps, the lunar swingby effect is equivalent to an instantaneous impulse, and the orbit inside the lunar SOI is approximate. Therefore the departure velocity from the GTO needs to be corrected to achieve the desired lunar swingby effect. The B-plane parameters
and
are used to correct the impulse at the departure time moment
as mentioned in
Section 3.1. This requires shooting the nonlinear Equation (
37). After the correction, the S/C still cannot reach the position of the Earth’s SOI designed in the previous step at the time moment
. The time moment of leaving the lunar SOI is denoted by
. A correction impulse is added in the orbit during the time moment
to the time moment
. Another impulse is added at the time moment
to meet the velocity requirement. The two impulses are denoted by
and
, and the corresponding time moments are denoted by
and
, where
. The schematic diagram of Substep 3 is shown in
Figure 9, where the subscript
a represents the time moment of the orbital correction between
and
, and the rest symbols have the same meaning as in
Figure 8. The superscripts {3} and {4} are used in subfigures (a) and (b) to distinguish the results after shooting the B-plane parameters and adding two correction impulses in Substep 3. Note that when the superscripts of the symbols in
Figure 8 and
Figure 9 are the same, their values are the same.
Step 3: Local optimization and validation of the simplified dynamical models. A local optimization problem should be solved. It has twenty optimization variables, twelve from Substep 1 of Step 2 (except for the swingby parameters
and
) and eight from the swingby correction (
,
, and six components of
and
in total). The ranges of the optimization variables are kept unchanged. The objective function to be minimized is:
where
and
are the magnitude of
and
, respectively, and the rest of the symbols have the same physical meaning as in Equation (
40). The states at the initial and final time moments need to be satisfied, and the total transfer duration should be less than the time limit
. Then, the simplified high-fidelity solution of low-energy orbital transfer is obtained by local optimization. As mentioned in
Section 2, for the geocentric orbits, in addition to the central gravitation of the Earth, the orbit of the spacecraft is affected by the perturbations due to the Earth’s nonspherical gravitation, atmospheric drag, solar gravitation, lunar gravitation, solar radiation, relativistic effects, solid tides, ocean tides, Earth’s rotational deformation, etc. For the heliocentric orbits, in addition to the solar gravitation, the orbit of the spacecraft is affected by the perturbations due to the gravitation of Mercury, Venus, Earth, Mars, Jupiter, Saturn, Uranus, Neptune, Pluto, the Moon, the solar radiation, etc. In the simplified high-fidelity models, the perturbations due to the Earth’s nonspherical gravitation, atmospheric drag, lunar gravitation, solar gravitation, and solar radiation are considered for the geocentric orbits, and the perturbations due to the gravitation of the Earth–Moon system, Jupiter, Venus, and Mercury, and the solar radiation are considered for the heliocentric orbits. Based on the design results in Step 2, we can calculate the terminal position and velocity relative errors obtained by integrating the equations of motion in the high-fidelity dynamical models and simplified high-fidelity models and record the computational times spent on propagating a single orbit. We will further verify that simplifying the dynamical models is reasonable and effective. The relative errors of terminal position and velocity and the ratio of computational times between the model
j and the model
i are defined as:
where
,
, and
denote the terminal position and velocity and computational times of propagating a single orbit under the model
j, respectively, and
,
, and
denote those under the model
i, respectively. Smaller
and
means that the two models are close to each other, and smaller
means that it takes a shorter time to propagate the orbit under the model
j.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}