
A Survey on Integrated Sensing, Communication, and Computing Networks for Smart Oceans

Abstract
:1. Introduction
1.1. Background of Smart Oceans
1.2. Existing Surveys
1.3. Motivations and Contributions
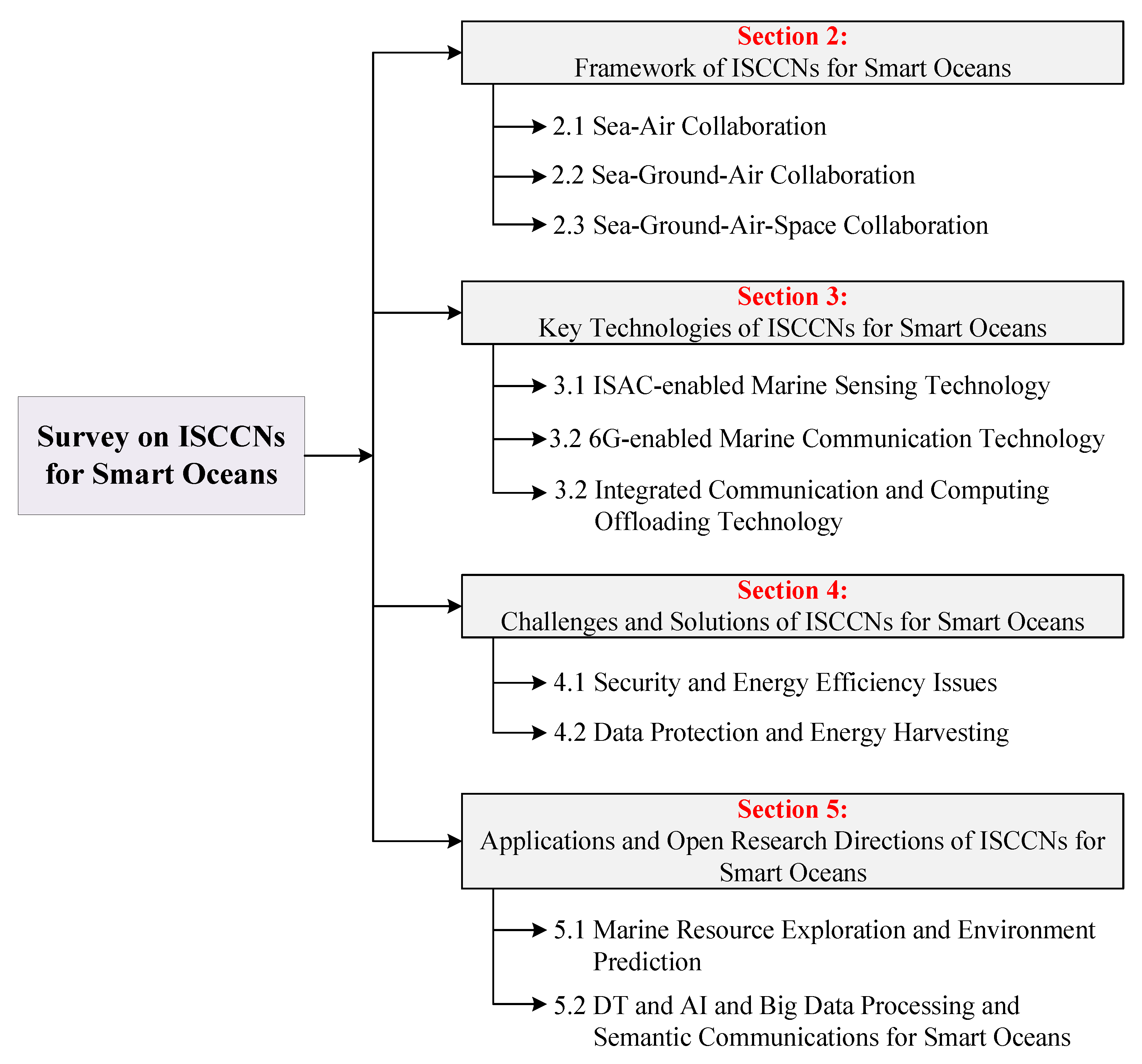
- We investigate the architecture of the ISCCNs for smart oceans from four domains (i.e., the satellite layer, the aerial layer, the sea surface layer, and the underwater layer) and five aspects (i.e., sensing-related, communication-related, computation-related, security-related, and application-related).
- We provide the key technologies of the ISCCNs for smart oceans, including the state-of-the-art marine sensing, communication, and computing paradigms. We discuss the emerging challenges from security and energy-efficiency points of view in marine networks and provide potential solutions to guarantee the intelligent services.
- We introduce the emerging applications for the ISCCNs in smart oceans to promote marine services. We also discuss the potential research directions for future works in marine networks.
2. Framework of ISCCNs for Smart Oceans
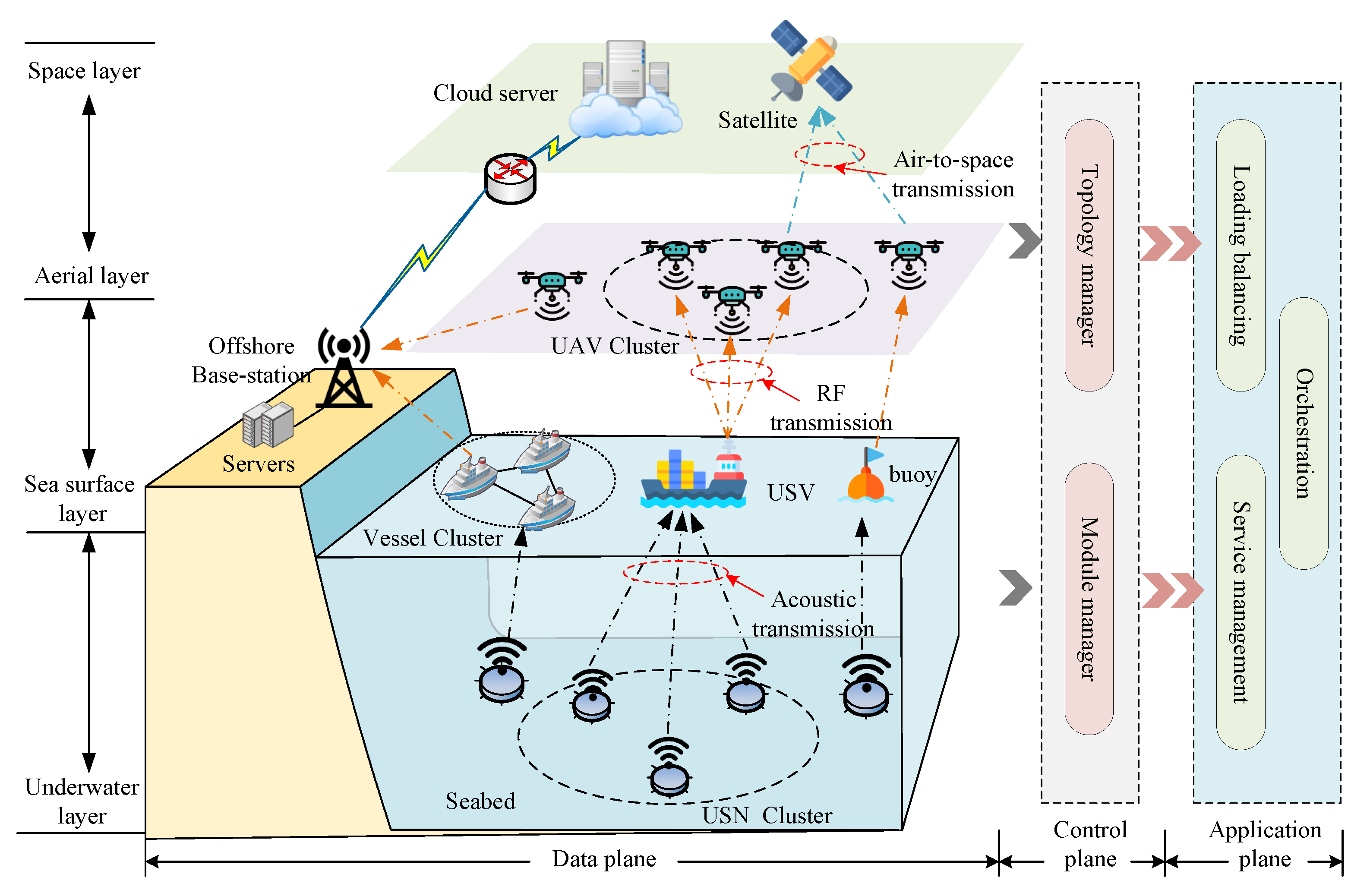
- Space layer. The space layer comprises diverse types of satellites, and the corresponding ground infrastructures, i.e., the ground/offshore BS and the control centers. The wide coverage characteristic of satellites guarantees the ubiquitous communication connection for smart oceans. In ocean disasters, satellites can provide emergency communication services in the deep sea. Moreover, these satellites are solar-powered, which enables the service endurance for marine objects.
- Aerial layer. The aerial layer consists of multiple aircrafts, UAVs, and balloons, which can establish the connections between marine objects and ground infrastructures, and can exchange information with the satellite layer. These UAVs deployed in the air can work separately or form a cluster to provide navigation, data relay, and computing services for ground/sea devices. Moreover, due to the high flexibility and the short distance between the aerial layer and sea surface layer, UAVs have the advantages of short response time and high throughput.
- Sea surface layer. The marine devices deployed at the sea surface layer can be vessels, unmanned surface vehicles (USVs), and buoys, which can collect the data from USNs and provide computing services for these resource-constrained maritime terminals through radio frequency (RF) transmission. Moreover, these marine devices in the surface layer can collect ocean environment information and complete harsh tasks. They can communicate with offshore BS and UAVs or offload workloads for processing.
- Underwater layer. A large number of USNs are deployed at the seabed for collecting oceanic data in the underwater layer. These USNs are generally powered by batteries, which cannot support data procession for a long time due to the difficulty of recharging in marine environments. The collected data are uploaded to the sea surface devices through acoustic transmission for storage and execution.
2.1. Two-Tier for Sea–Air Collaboration
2.2. Three-Tier for Sea–Ground–Air Collaboration
2.3. Four-Tier for Sea–Ground–Air–Space Collaboration
2.4. Multitier Collaboration of ISCCNs for Smart Oceans
3. Key Technologies of ISCCNs for Smart Oceans
3.1. ISAC-Enabled Marine Sensing Technology
3.2. 6G-Enabled Marine Communication Technology
3.2.1. 6G-Enabled Marine Communications
3.2.2. IRS-Enabled Marine Surface Communications
- IRS-enabled marine surface communications can benefit from the simultaneous wireless information and power transfer (SWIPT) technology. Leveraging the mobility of a UAV, the IRS on the UAV can be flexibly deployed to reinforce the SWIPT. Liu et al., in [50], studied the UAV-mounted IRS-assisted power transfer and information transmission in SWIPT, where different devices are scheduled by a time division multiple access (TDMA) protocol. Li et al., in [51], utilized IRS to enhance the channel to improve the coverage area of the UAV and the energy transfer efficiency via nonorthogonal multiple access (NOMA) transmission, by jointly optimizing the transmit power of the UAV, the successive interference cancellation decoding order, and the phase shift of the IRS. Mei et al., in [52], studied the downlink UAV-enabled IRS-assisted SWIPT system, where the charging process of the mobile devices and the data transmission are performed by leveraging the time switching mechanism. Yu et al., in [53], investigated the IRS-assisted SWIPT system, where multiple IRSs are deployed on UAVs and high buildings to improve both the performance of information transmission and energy transfer. In [53], the active beamforming on the transmitter, the phase shift of IRS, the power splittingratio, and the trajectories of UAVs are jointly optimized to maximize the average data rate.
- IRS-enabled marine surface communications can also benefit from the NOMA technology, which allows marine devices to connect to the offshore BS. Jiao et al., in [54], investigated the UAV-enabled IRS-assisted NOMA downlink transmission, where the rate of the user with good channel condition is maximized meanwhile the requirement of the rate of the user with bad channel condition can be satisfied. In [54], the position of the UAV, the active beamforming, and the phase shift of IRS are alternatively optimized via the successive convex approximation technique. Liu et al., in [55], analyzed the converge performance of multiple IRSs which were mounted on multiple UAVs, where a tier of UAVs served several devices via NOMA. The authors in [56] utilized IRS to assist the NOMA transmission in the scenario of multiple UAVs, where the users were divided into multiple NOMA clusters. The results in [56] showed that the interference of two UAVs can be reduced by adjusting their distance. The authors in [57] analyzed the outage probability and the ergodic spectral efficiency in the UAV-assisted NOMA transmission, where the IRS on the UAV served as a relay to assist the NOMA transmission. Cai et al., in [58], investigated the UAV-assisted NOMA network, utilizing IRS to reduce the overall energy consumption. The results in [58] illustrate that NOMA can provide more degrees of freedom in system design compared with the orthogonal multiple access scheme, and IRS helps to save the communication power of UAV.
3.3. Integrated Communication and Computing Offloading Technology
4. Challenges and Solutions of ISCCNs for Smart Oceans
4.1. Challenges of ISCCNs for Smart Oceans
4.1.1. Data Confidentiality
4.1.2. Data Integrity
4.1.3. Energy Efficiency
4.2. Solutions of ISCCNs for Smart Oceans
4.2.1. Cooperative Jamming for Security
4.2.2. Federated Learning for Data Privacy
4.2.3. Blockchain for Data Integrity
4.2.4. Energy Harvesting and Energy Transfer
5. Applications and Open Research Directions of ISCCNs for Smart Oceans
5.1. Applications of ISCCNs for Smart Oceans
5.1.1. Marine Resource Exploration
5.1.2. Marine Environment Information Prediction
5.2. Open Research Directions of ISCCNs for Smart Oceans
5.2.1. Digital Twin for Smart Oceans
5.2.2. Artificial Intelligence for Smart Oceans
5.2.3. Big Data Processing for Smart Oceans
5.2.4. Semantic Communications for Smart Oceans
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qiu, T.; Zhao, Z.; Zhang, T.; Chen, C.; Chen, C.P. Underwater Internet of Things in smart ocean: System architecture and open issues. IEEE Trans. Ind. Inform. 2019, 16, 4297–4307. [Google Scholar] [CrossRef]
- Zolich, A.; Palma, D.; Kansanen, K.; Fjørtoft, K.; Sousa, J.; Johansson, K.H.; Jiang, Y.; Dong, H.; Johansen, T.A. Survey on communication and networks for autonomous marine systems. J. Intell. Robot. Syst. 2019, 95, 789–813. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Yao, B.; Xing, R.; Shu, L.; Bu, S. E-CARP: An Energy Efficient Routing Protocol for UWSNs in the Internet of Underwater Things. IEEE Sens. J. 2016, 16, 4072–4082. [Google Scholar] [CrossRef]
- Guo, H.; Li, J.; Liu, J.; Tian, N.; Kato, N. A Survey on Space-Air-Ground-Sea Integrated Network Security in 6G. IEEE Commun. Surv. Tutor. 2022, 24, 53–87. [Google Scholar] [CrossRef]
- Han, G.; Zhang, C.; Shu, L.; Rodrigues, J.J.P.C. Impacts of Deployment Strategies on Localization Performance in Underwater Acoustic Sensor Networks. IEEE Trans. Ind. Electron. 2015, 62, 1725–1733. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, L.; Liu, S.; Zheng, J.; Wang, H. Privacy Protection Scheme Based on CP-ABE in Crowdsourcing-IoT for Smart Ocean. IEEE Internet Things J. 2020, 7, 10061–10071. [Google Scholar] [CrossRef]
- Hu, C.; Pu, Y.; Yang, F.; Zhao, R.; Alrawais, A.; Xiang, T. Secure and Efficient Data Collection and Storage of IoT in Smart Ocean. IEEE Internet Things J. 2020, 7, 9980–9994. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J.; Du, J.; Hou, X.; Ren, Y.; Han, Z. Stochastic Optimization-Aided Energy-Efficient Information Collection in Internet of Underwater Things Networks. IEEE Internet Things J. 2022, 9, 1775–1789. [Google Scholar] [CrossRef]
- Alfouzan, F.A. Energy-efficient collision avoidance MAC protocols for underwater sensor networks: Survey and challenges. J. Mar. Sci. Eng. 2021, 9, 741. [Google Scholar] [CrossRef]
- Luo, H.; Wang, J.; Bu, F.; Ruby, R.; Wu, K.; Guo, Z. Recent progress of air/water cross-boundary communications for underwater sensor networks: A review. IEEE Sens. J. 2022, 22, 8360–8382. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Wang, Y.; Su, Z.; Ni, J.; Zhang, N.; Shen, X. Blockchain-Empowered Space-Air-Ground Integrated Networks: Opportunities, Challenges, and Solutions. IEEE Commun. Surv. Tutor. 2022, 24, 160–209. [Google Scholar] [CrossRef]
- Zhang, W.; Li, L.; Zhang, N.; Han, T.; Wang, S. Air-Ground Integrated Mobile Edge Networks: A Survey. IEEE Access 2020, 8, 125998–126018. [Google Scholar] [CrossRef]
- Wei, T.; Feng, W.; Chen, Y.; Wang, C.X.; Ge, N.; Lu, J. Hybrid Satellite-Terrestrial Communication Networks for the Maritime Internet of Things: Key Technologies, Opportunities, and Challenges. IEEE Internet Things J. 2021, 8, 8910–8934. [Google Scholar] [CrossRef]
- Su, N.; Wang, J.B.; Zeng, C.; Zhang, H.; Lin, M.; Li, G.Y. Unmanned Surface Vehicle Aided Maritime Data Collection Using Deep Reinforcement Learning. IEEE Internet Things J. 2022, 9, 19773–19786. [Google Scholar] [CrossRef]
- Zhang, Y.; Lyu, J.; Fu, L. Energy-Efficient Cyclical Trajectory Design for UAV-Aided Maritime Data Collection in Wind. In Proceedings of the GLOBECOM 2020–2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Y.; Ma, Y.; Lin, B. Resource Allocation for OFDM-based Maritime Edge Computing Networks. In Proceedings of the 2020 13th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Chengdu, China, 17–19 October 2020; pp. 983–988. [Google Scholar] [CrossRef]
- Zeng, H.; Li, R.; Su, Z.; Xu, Q.; Wang, Y.; Dai, M.; Luan, T.H.; Sun, X.; Liu, D. Collaborative Computation Offloading for UAVs and USV Fleets in Communication Networks. In Proceedings of the 2022 International Wireless Communications and Mobile Computing (IWCMC), Dubrovnik, Croatia, 30 May–3 June 2022; pp. 949–954. [Google Scholar] [CrossRef]
- Yang, T.; Feng, H.; Yang, C.; Wang, Y.; Dong, J.; Xia, M. Multivessel Computation Offloading in Maritime Mobile Edge Computing Network. IEEE Internet Things J. 2019, 6, 4063–4073. [Google Scholar] [CrossRef]
- Dai, M.; Wu, Y.; Qian, L.; Su, Z.; Lin, B.; Chen, N. UAV-Assisted Multi-Access Computation Offloading Via Hybrid NOMA and FDMA in Marine Networks. IEEE Trans. Netw. Sci. Eng. 2022, 1–15. [Google Scholar] [CrossRef]
- Wang, Z.; Su, X.; Xin, Y. Multi-access Edge Computing Offloading Method Oriented to Offshore Scenarios. In Proceedings of the 2021 IEEE/CIC International Conference on Communications in China (ICCC), Xiamen, China, 28–30 July 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Xiao, A.; Chen, H.; Wu, S.; Zhang, P.; Li, H.; Ma, L. Voyage-Based Computation Offloading for Secure Maritime Edge Networks. In Proceedings of the 2020 IEEE Globecom Workshops (GC Wkshps), Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, J.; Zhao, X. Deep Reinforcement Learning Based Latency Minimization for Mobile Edge Computing with Virtualization in Maritime UAV Communication Network. IEEE Trans. Veh. Technol. 2022, 71, 4225–4236. [Google Scholar] [CrossRef]
- Dai, Y.; Lin, B.; Che, Y.; Lyu, L. UAV-assisted data offloading for smart container in offshore maritime communications. China Commun. 2022, 19, 153–165. [Google Scholar] [CrossRef]
- Ma, R.; Wang, R.; Liu, G.; Meng, W.; Liu, X. UAV-aided cooperative data collection scheme for ocean monitoring networks. IEEE Internet Things J. 2021, 8, 13222–13236. [Google Scholar] [CrossRef]
- Yang, T.; Feng, H.; Gao, S.; Jiang, Z.; Qin, M.; Cheng, N.; Bai, L. Two-stage offloading optimization for energy–latency tradeoff with mobile edge computing in maritime Internet of Things. IEEE Internet Things J. 2019, 7, 5954–5963. [Google Scholar] [CrossRef]
- Wang, Z.; Lin, B.; Sun, L.; Wang, Y. Intelligent Task Offloading for 6G-Enabled Maritime IoT Based on Reinforcement Learning. In Proceedings of the 2021 International Conference on Security, Pattern Analysis, and Cybernetics (SPAC), Chengdu, China, 18–20 June 2021; pp. 566–570. [Google Scholar]
- Xiao, A.; Wang, X.; Wu, S.; Jiang, C.; Ma, L. Mobility-Aware Resource Management for Integrated Satellite-Maritime Mobile Networks. IEEE Netw. 2022, 36, 121–127. [Google Scholar] [CrossRef]
- Gao, S.; Yang, T.; Ni, H.; Zhang, G. Multi-Armed Bandits Scheme for Tasks Offloading in MEC-enabled Maritime Communication Networks. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC), Chongqing, China, 9–11 August 2020; pp. 232–237. [Google Scholar] [CrossRef]
- Xu, F.; Yang, F.; Zhao, C.; Wu, S. Deep reinforcement learning based joint edge resource management in maritime network. China Commun. 2020, 17, 211–222. [Google Scholar] [CrossRef]
- Yang, T.; Chen, J.; Zhang, N. AI-Empowered Maritime Internet of Things: A Parallel-Network-Driven Approach. IEEE Netw. 2020, 34, 54–59. [Google Scholar] [CrossRef]
- Liu, Q.; Liang, H.; Luo, R.; Liu, Q. Energy-Efficiency Computation Offloading Strategy in UAV Aided V2X Network with Integrated Sensing and Communication. IEEE Open J. Commun. Soc. 2022, 3, 1337–1346. [Google Scholar] [CrossRef]
- Meng, K.; Wu, Q.; Ma, S.; Chen, W.; Quek, T.Q.S. UAV Trajectory and Beamforming Optimization for Integrated Periodic Sensing and Communication. IEEE Wirel. Commun. Lett. 2022, 11, 1211–1215. [Google Scholar] [CrossRef]
- Lyu, Z.; Zhu, G.; Xu, J. Joint Trajectory and Beamforming Design for UAV-Enabled Integrated Sensing and Communication. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Korea, 16–20 May 2022; pp. 1593–1598. [Google Scholar] [CrossRef]
- Zhang, K.; Shen, C. UAV Aided Integrated Sensing and Communications. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Norman, OK, USA, 27–30 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, N.; Wang, T.; Wu, Y.; Wu, Q.; Quek, T.Q.S. Integrated Sensing and Communication Assisted Mobile Edge Computing: An Energy-Efficient Design via Intelligent Reflecting Surface. IEEE Wirel. Commun. Lett. 2022, 11, 2085–2089. [Google Scholar] [CrossRef]
- Ding, C.; Wang, J.B.; Zhang, H.; Lin, M.; Li, G.Y. Joint MIMO Precoding and Computation Resource Allocation for Dual-Function Radar and Communication Systems with Mobile Edge Computing. IEEE J. Sel. Areas Commun. 2022, 40, 2085–2102. [Google Scholar] [CrossRef]
- Jahanbakht, M.; Xiang, W.; Hanzo, L.; Azghadi, M.R. Internet of underwater things and big marine data analytics—a comprehensive survey. IEEE Commun. Surv. Tutor. 2021, 23, 904–956. [Google Scholar] [CrossRef]
- Liu, R.W.; Nie, J.; Garg, S.; Xiong, Z.; Zhang, Y.; Hossain, M.S. Data-driven trajectory quality improvement for promoting intelligent vessel traffic services in 6G-enabled maritime IoT systems. IEEE Internet Things J. 2020, 8, 5374–5385. [Google Scholar] [CrossRef]
- Zhang, J.; Han, G.; Sha, J.; Qian, Y.; Liu, J. AUV-assisted subsea exploration method in 6G enabled deep ocean based on a cooperative pac-men mechanism. IEEE Trans. Intell. Transp. Syst. 2021, 23, 1649–1660. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.X.; Chang, H.; He, Y.; Bian, J. A novel non-stationary 6G UAV channel model for maritime communications. IEEE J. Sel. Areas Commun. 2021, 39, 2992–3005. [Google Scholar] [CrossRef]
- Wang, J.B.; Zeng, C.; Ding, C.; Zhang, H.; Lin, M.; Wang, J. Unmanned Surface Vessel Assisted Maritime Wireless Communication Toward 6G: Opportunities and Challenges. IEEE Wirel. Commun. 2022, 1–17. [Google Scholar] [CrossRef]
- Gong, S.; Lu, X.; Hoang, D.T.; Niyato, D.; Shu, L.; Kim, D.I.; Liang, Y.C. Toward Smart Wireless Communications via Intelligent Reflecting Surfaces: A Contemporary Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2283–2314. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Beamforming Optimization for Wireless Network Aided by Intelligent Reflecting Surface with Discrete Phase Shifts. IEEE Trans. Commun. 2020, 68, 1838–1851. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.; Liu, Z.; Jiang, F.; Wang, K. Joint Optimization of Deployment and Trajectory in UAV and IRS-Assisted IoT Data Collection System. IEEE Internet Things J. 2022, 9, 21583–21593. [Google Scholar] [CrossRef]
- Xu, J.; Kang, X.; Zhang, R.; Liang, Y.C. Joint Power and Trajectory Optimization for IRS-aided Master-Auxiliary-UAV-powered IoT Networks. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Mahmoud, A.; Muhaidat, S.; Sofotasios, P.C.; Abualhaol, I.; Dobre, O.A.; Yanikomeroglu, H. Intelligent Reflecting Surfaces Assisted UAV Communications for IoT Networks: Performance Analysis. IEEE Trans. Green Commun. Netw. 2021, 5, 1029–1040. [Google Scholar] [CrossRef]
- Solanki, S.; Gautam, S.; Sharma, S.K.; Chatzinotas, S. Ambient Backscatter Assisted Co-Existence in Aerial-IRS Wireless Networks. IEEE Open J. Commun. Soc. 2022, 3, 608–621. [Google Scholar] [CrossRef]
- Liu, Y.; Han, F.; Zhao, S. Flexible and Reliable Multiuser SWIPT IoT Network Enhanced by UAV-Mounted Intelligent Reflecting Surface. IEEE Trans. Reliab. 2022, 71, 1092–1103. [Google Scholar] [CrossRef]
- Li, Z.; Chen, W.; Cao, H.; Tang, H.; Wang, K.; Li, J. Joint Communication and Trajectory Design for Intelligent Reflecting Surface Empowered UAV SWIPT Networks. IEEE Trans. Veh. Technol. 2022, 1–16. [Google Scholar] [CrossRef]
- Mei, C.; Fang, Y.; Qiu, L. Dual Based Optimization Method for IRS-Aided UAV-Enabled SWIPT System. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 890–895. [Google Scholar] [CrossRef]
- Yu, K.; Yu, X.; Cai, J. UAVs Assisted Intelligent Reflecting Surfaces SWIPT System with Statistical CSI. IEEE J. Sel. Top. Signal Process. 2021, 15, 1095–1109. [Google Scholar] [CrossRef]
- Jiao, S.; Fang, F.; Zhou, X.; Zhang, H. Joint Beamforming and Phase Shift Design in Downlink UAV Networks with IRS-Assisted NOMA. J. Commun. Inf. Netw. 2020, 5, 138–149. [Google Scholar] [CrossRef]
- Liu, C.H.; Syed, M.A.; Wei, L. Toward Ubiquitous and Flexible Coverage of UAV-IRS-Assisted NOMA Networks. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 1749–1754. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Poor, H.V. Intelligent Reflecting Surface Enhanced Multi-UAV NOMA Networks. IEEE J. Sel. Areas Commun. 2021, 39, 3051–3066. [Google Scholar] [CrossRef]
- Solanki, S.; Park, J.; Lee, I. On the Performance of IRS-Aided UAV Networks with NOMA. IEEE Trans. Veh. Technol. 2022, 71, 9038–9043. [Google Scholar] [CrossRef]
- Cai, Y.; Wei, Z.; Hu, S.; Liu, C.; Ng, D.W.K.; Yuan, J. Resource Allocation and 3D Trajectory Design for Power-Efficient IRS-Assisted UAV-NOMA Communications. IEEE Trans. Wirel. Commun. 2022, 1. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, W.; Wang, J.; Quek, T.Q. Hybrid satellite-UAV-terrestrial networks for 6G ubiquitous coverage: A maritime communications perspective. IEEE J. Sel. Areas Commun. 2021, 39, 3475–3490. [Google Scholar] [CrossRef]
- Shang, B.; Yi, Y.; Liu, L. Computing over Space-Air-Ground Integrated Networks: Challenges and Opportunities. IEEE Netw. 2021, 35, 302–309. [Google Scholar] [CrossRef]
- Zeng, J.; Sun, J.; Wu, B.; Su, X. Mobile edge communications, computing, and caching (MEC3) technology in the maritime communication network. China Commun. 2020, 17, 223–234. [Google Scholar] [CrossRef]
- Liu, Y.; Qin, Z.; Elkashlan, M.; Ding, Z.; Nallanathan, A.; Hanzo, L. Non-orthogonal multiple access for 5G and beyond. Proc. IEEE 2017, 105, 2347–2381. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Liu, J. Collaborative computation offloading for multiaccess edge computing over fiber–wireless networks. IEEE Trans. Veh. Technol. 2018, 67, 4514–4526. [Google Scholar] [CrossRef]
- Wu, Y.; Ni, K.; Zhang, C.; Qian, L.P.; Tsang, D.H. NOMA-assisted multi-access mobile edge computing: A joint optimization of computation offloading and time allocation. IEEE Trans. Veh. Technol. 2018, 67, 12244–12258. [Google Scholar] [CrossRef]
- Tang, R.; Feng, W.; Chen, Y.; Ge, N. NOMA-based UAV communications for maritime coverage enhancement. China Commun. 2021, 18, 230–243. [Google Scholar] [CrossRef]
- Fang, X.; Feng, W.; Wang, Y.; Chen, Y.; Ge, N.; Ding, Z.; Zhu, H. NOMA-Based Hybrid Satellite-UAV-Terrestrial Networks for 6G Maritime Coverage. IEEE Trans. Wirel. Commun. 2022. [Google Scholar] [CrossRef]
- Hassan, S.S.; Tun, Y.K.; Saad, W.; Han, Z.; Hong, C.S. Blue Data Computation Maximization in 6G Space-Air-Sea Non-Terrestrial Networks. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zhu, C.; Zhang, W.; Chiang, Y.; Ye, N.; Du, L.; An, J. Software-Defined Maritime Fog Computing: Architecture, Advantages, and Feasibility. IEEE Netw. 2022, 36, 26–33. [Google Scholar] [CrossRef]
- Ai, Q.; Qiao, X.; Liao, Y.; Yu, Q. Joint Optimization of USVs Communication and Computation Resource in IRS-Aided Wireless Inland Ship MEC Networks. IEEE Trans. Green Commun. Netw. 2022, 6, 1023–1036. [Google Scholar] [CrossRef]
- Cheng, X.; Qu, F.; Yang, L. Single carrier FDMA over underwater acoustic channels. In Proceedings of the 2011 6th International ICST Conference on Communications and Networking in China (CHINACOM), Yokohama, Japan, 6–9 May 2012; IEEE, 2011; pp. 1052–1057. [Google Scholar]
- Yu, W.; Chen, Y.; Wan, L.; Zhang, X.; Zhu, P.; Xu, X. An energy optimization clustering scheme for multi-hop underwater acoustic cooperative sensor networks. IEEE Access 2020, 8, 89171–89184. [Google Scholar] [CrossRef]
- Demir, H.S.; Christen, J.B.; Ozev, S. Energy-efficient image recognition system for marine life. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2020, 39, 3458–3466. [Google Scholar] [CrossRef]
- Geng, X.; Wang, Y.; Feng, H.; Zhang, L. Lanepost: Lane-based optimal routing protocol for delay-tolerant maritime networks. China Commun. 2017, 14, 65–78. [Google Scholar] [CrossRef]
- Zhou, X.; Li, Y.; He, D.; Zhang, C.; Ji, X. Energy-efficient channel allocation based data aggregation for intertidal wireless sensor networks. IEEE Sens. J. 2021, 21, 17386–17394. [Google Scholar] [CrossRef]
- Lin, Z.; Chen, X.; Chen, P. Energy harvesting space-air-sea integrated networks for MEC-enabled maritime Internet of Things. China Commun. 2022, 19, 47–57. [Google Scholar] [CrossRef]
- Liu, X.; Zhai, X.B.; Lu, W.; Wu, C. QoS-guarantee resource allocation for multibeam satellite industrial internet of things with NOMA. IEEE Trans. Ind. Inform. 2019, 17, 2052–2061. [Google Scholar] [CrossRef]
- Zhang, J.; Dai, M.; Su, Z. Task allocation with unmanned surface vehicles in smart ocean IoT. IEEE Internet Things J. 2020, 7, 9702–9713. [Google Scholar] [CrossRef]
- Ranaweera, P.; Jurcut, A.D.; Liyanage, M. Survey on Multi-Access Edge Computing Security and Privacy. IEEE Commun. Surv. Tutor. 2021, 23, 1078–1124. [Google Scholar] [CrossRef]
- Abbas, N.; Zhang, Y.; Taherkordi, A.; Skeie, T. Mobile Edge Computing: A Survey. IEEE Internet Things J. 2018, 5, 450–465. [Google Scholar] [CrossRef] [Green Version]
- Cao, K.; Liu, Y.; Meng, G.; Sun, Q. An Overview on Edge Computing Research. IEEE Access 2020, 8, 85714–85728. [Google Scholar] [CrossRef]
- Feng, C.; Yu, K.; Aloqaily, M.; Alazab, M.; Lv, Z.; Mumtaz, S. Attribute-Based Encryption with Parallel Outsourced Decryption for Edge Intelligent IoV. IEEE Trans. Veh. Technol. 2020, 69, 13784–13795. [Google Scholar] [CrossRef]
- Liu, J.; Li, Y.; Sun, R.; Pei, Q.; Zhang, N.; Dong, M.; Leung, V.C.M. EMK-ABSE: Efficient Multi-Keyword Attribute-Based Searchable Encryption Scheme Through Cloud-Edge Coordination. IEEE Internet Things J. 2022, 9, 18650–18662. [Google Scholar] [CrossRef]
- Wu, J.; Sheng, X.; Li, G.; Yu, K.; Liu, J. An efficient and secure aggregation encryption scheme in edge computing. China Commun. 2022, 19, 245–257. [Google Scholar] [CrossRef]
- Hu, F.; Chen, B. Channel Coding Scheme for Relay Edge Computing Wireless Networks via Homomorphic Encryption and NOMA. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 1180–1192. [Google Scholar] [CrossRef]
- Jameel, F.; Wyne, S.; Kaddoum, G.; Duong, T.Q. A Comprehensive Survey on Cooperative Relaying and Jamming Strategies for Physical Layer Security. IEEE Commun. Surv. Tutor. 2019, 21, 2734–2771. [Google Scholar] [CrossRef] [Green Version]
- Huo, Y.; Tian, Y.; Ma, L.; Cheng, X.; Jing, T. Jamming Strategies for Physical Layer Security. IEEE Wirel. Commun. 2018, 25, 148–153. [Google Scholar] [CrossRef]
- Lim, W.Y.B.; Luong, N.C.; Hoang, D.T.; Jiao, Y.; Liang, Y.C.; Yang, Q.; Niyato, D.; Miao, C. Federated Learning in Mobile Edge Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2031–2063. [Google Scholar] [CrossRef] [Green Version]
- Cui, G.; He, Q.; Li, B.; Xia, X.; Chen, F.; Jin, H.; Xiang, Y.; Yang, Y. Efficient Verification of Edge Data Integrity in Edge Computing Environment. IEEE Trans. Serv. Comput. 2021, 1. [Google Scholar] [CrossRef]
- Li, B.; He, Q.; Chen, F.; Jin, H.; Xiang, Y.; Yang, Y. Inspecting Edge Data Integrity with Aggregated Signature in Distributed Edge Computing Environment. IEEE Trans. Cloud Comput. 2021, 1. [Google Scholar] [CrossRef]
- Yu, H.; Hu, Q.; Yang, Z.; Liu, H. Efficient Continuous Big Data Integrity Checking for Decentralized Storage. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1658–1673. [Google Scholar] [CrossRef]
- Shen, W.; Qin, J.; Yu, J.; Hao, R.; Hu, J. Enabling Identity-Based Integrity Auditing and Data Sharing With Sensitive Information Hiding for Secure Cloud Storage. IEEE Trans. Inf. Forensics Secur. 2019, 14, 331–346. [Google Scholar] [CrossRef]
- Tong, W.; Chen, W.; Jiang, B.; Xu, F.; Li, Q.; Zhong, S. Privacy-Preserving Data Integrity Verification for Secure Mobile Edge Storage. IEEE Trans. Mob. Comput. 2022, 1. [Google Scholar] [CrossRef]
- Zheng, Z.; Xie, S.; Dai, H.N.; Chen, X.; Wang, H. Blockchain challenges and opportunities: A survey. Int. J. Web Grid Serv. 2018, 14, 352–375. [Google Scholar] [CrossRef]
- Dai, H.N.; Zheng, Z.; Zhang, Y. Blockchain for Internet of Things: A Survey. IEEE Internet Things J. 2019, 6, 8076–8094. [Google Scholar] [CrossRef] [Green Version]
- Cao, X.; Zhang, H.; Peng, M. Collaborative multiple access and energy-efficient resource allocation in distributed maritime wireless networks. China Commun. 2022, 19, 137–153. [Google Scholar] [CrossRef]
- Zhang, M.; Cai, W. Energy-efficient depth based probabilistic routing within 2-hop neighborhood for underwater sensor networks. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Su, Y.; Fan, R.; Fu, X.; Jin, Z. DQELR: An Adaptive Deep Q-Network-Based Energy- and Latency-Aware Routing Protocol Design for Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 9091–9104. [Google Scholar] [CrossRef]
- Wang, M.; Chen, Y.; Sun, X.; Xiao, F.; Xu, X. Node Energy Consumption Balanced Multi-Hop Transmission for Underwater Acoustic Sensor Networks Based on Clustering Algorithm. IEEE Access 2020, 8, 191231–191241. [Google Scholar] [CrossRef]
- Xing, G.; Chen, Y.; He, L.; Su, W.; Hou, R.; Li, W.; Zhang, C.; Chen, X. Energy Consumption in Relay Underwater Acoustic Sensor Networks for NDN. IEEE Access 2019, 7, 42694–42702. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, X.; Xu, X. Energy-efficient mobile data collection adopting node cooperation in an underwater acoustic sensor network. China Commun. 2017, 14, 32–42. [Google Scholar] [CrossRef]
- Jing, L.; He, C.; Huang, J.; Ding, Z. Energy Management and Power Allocation for Underwater Acoustic Sensor Network. IEEE Sens. J. 2017, 17, 6451–6462. [Google Scholar] [CrossRef]
- Zhang, T.; Wen, H.; Tang, J.; Song, H.; Xie, F. Cooperative Jamming Secure Scheme for IWNs Random Mobile Users Aided by Edge Computing Intelligent Node Selection. IEEE Trans. Ind. Inform. 2021, 17, 4999–5009. [Google Scholar] [CrossRef]
- Qian, L.; Wu, W.; Lu, W.; Wu, Y.; Lin, B.; Quek, T.Q.S. Secrecy-Based Energy-Efficient Mobile Edge Computing via Cooperative Non-Orthogonal Multiple Access Transmission. IEEE Trans. Commun. 2021, 69, 4659–4677. [Google Scholar] [CrossRef]
- Li, B.; Wu, W.; Zhao, W.; Zhang, H. Security Enhancement with a Hybrid Cooperative NOMA Scheme for MEC System. IEEE Trans. Veh. Technol. 2021, 70, 2635–2648. [Google Scholar] [CrossRef]
- Cui, M.; Zhang, H.; Huang, Y.; Xu, Z.; Zhao, Q. A Fountain-Coding Based Cooperative Jamming Strategy for Secure Service Migration in Edge Computing. Wirel. Netw. 2021, 1–14. [Google Scholar] [CrossRef]
- Nguyen, D.C.; Ding, M.; Pathirana, P.N.; Seneviratne, A.; Li, J.; Poor, H.V. Federated learning for internet of things: A comprehensive survey. IEEE Commun. Surv. Tutor. 2021, 23, 1622–1658. [Google Scholar] [CrossRef]
- Chen, M.; Yang, Z.; Saad, W.; Yin, C.; Poor, H.V.; Cui, S. A joint learning and communications framework for federated learning over wireless networks. IEEE Trans. Wirel. Commun. 2020, 20, 269–283. [Google Scholar] [CrossRef]
- Wu, Y.; Song, Y.; Wang, T.; Qian, L.; Quek, T.Q. Non-Orthogonal Multiple Access Assisted Federated Learning via Wireless Power Transfer: A Cost-Efficient Approach. IEEE Trans. Commun. 2022, 70, 2853–2869. [Google Scholar] [CrossRef]
- Bao, W.; Wu, C.; Guleng, S.; Zhang, J.; Yau, K.L.A.; Ji, Y. Edge computing-based joint client selection and networking scheme for federated learning in vehicular IoT. China Commun. 2021, 18, 39–52. [Google Scholar] [CrossRef]
- Zhou, J.; Wu, N.; Wang, Y.; Gu, S.; Cao, Z.; Dong, X.; Choo, K.K.R. A Differentially Private Federated Learning Model against Poisoning Attacks in Edge Computing. IEEE Trans. Dependable Secur. Comput. 2022, 1. [Google Scholar] [CrossRef]
- Mills, J.; Hu, J.; Min, G. Multi-Task Federated Learning for Personalised Deep Neural Networks in Edge Computing. IEEE Trans. Parallel Distrib. Syst. 2022, 33, 630–641. [Google Scholar] [CrossRef]
- He, C.; Liu, G.; Guo, S.; Yang, Y. Privacy-Preserving and Low-Latency Federated Learning in Edge Computing. IEEE Internet Things J. 2022, 9, 20149–20159. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, X.; Zheng, X.; Li, R.; Liu, H. FengHuoLun: A Federated Learning based Edge Computing Platform for Cyber-Physical Systems. In Proceedings of the 2020 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Taipei, Taiwan, 7–11 December 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Ye, Y.; Li, S.; Liu, F.; Tang, Y.; Hu, W. EdgeFed: Optimized Federated Learning Based on Edge Computing. IEEE Access 2020, 8, 209191–209198. [Google Scholar] [CrossRef]
- Ahmed, K.M.; Imteaj, A.; Amini, M.H. Federated Deep Learning for Heterogeneous Edge Computing. In Proceedings of the 2021 20th IEEE International Conference on Machine Learning and Applications (ICMLA), Pasadena, CA, USA, 13–16 December 2021; pp. 1146–1152. [Google Scholar] [CrossRef]
- Amannejad, Y. Building and Evaluating Federated Models for Edge Computing. In Proceedings of the 2020 16th International Conference on Network and Service Management (CNSM), Izmir, Turkey, 2–6 November 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, Y.; Su, Z.; Zhang, N.; Benslimane, A. Learning in the Air: Secure Federated Learning for UAV-Assisted Crowdsensing. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1055–1069. [Google Scholar] [CrossRef]
- Liu, Y.; Nie, J.; Li, X.; Ahmed, S.H.; Lim, W.Y.B.; Miao, C. Federated Learning in the Sky: Aerial-Ground Air Quality Sensing Framework with UAV Swarms. IEEE Internet Things J. 2021, 8, 9827–9837. [Google Scholar] [CrossRef]
- Yang, H.; Zhao, J.; Xiong, Z.; Lam, K.Y.; Sun, S.; Xiao, L. Privacy-Preserving Federated Learning for UAV-Enabled Networks: Learning-Based Joint Scheduling and Resource Management. IEEE J. Sel. Areas Commun. 2021, 39, 3144–3159. [Google Scholar] [CrossRef]
- Do, Q.V.; Pham, Q.V.; Hwang, W.J. Deep Reinforcement Learning for Energy-Efficient Federated Learning in UAV-Enabled Wireless Powered Networks. IEEE Commun. Lett. 2022, 26, 99–103. [Google Scholar] [CrossRef]
- Dai, Z.; Zhang, Y.; Zhang, W.; Luo, X.; He, Z. A Multi-Agent Collaborative Environment Learning Method for UAV Deployment and Resource Allocation. IEEE Trans. Signal Inf. Process. Netw. 2022, 8, 120–130. [Google Scholar] [CrossRef]
- Mowla, N.I.; Tran, N.H.; Doh, I.; Chae, K. Federated Learning-Based Cognitive Detection of Jamming Attack in Flying Ad-Hoc Network. IEEE Access 2020, 8, 4338–4350. [Google Scholar] [CrossRef]
- Qin, Z.; Ye, J.; Meng, J.; Lu, B.; Wang, L. Privacy-Preserving Blockchain-Based Federated Learning for Marine Internet of Things. IEEE Trans. Comput. Soc. Syst. 2022, 9, 159–173. [Google Scholar] [CrossRef]
- Han, C.; Yang, T. Privacy Protection Technology of Maritime Multi-agent Communication Based on Part-Federated Learning. In Proceedings of the 2021 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Xiamen, China, 28–30 July 2021; pp. 266–271. [Google Scholar] [CrossRef]
- Zhang, Z.; Guan, C.; Chen, H.; Yang, X.; Gong, W.; Yang, A. Adaptive Privacy-Preserving Federated Learning for Fault Diagnosis in Internet of Ships. IEEE Internet Things J. 2022, 9, 6844–6854. [Google Scholar] [CrossRef]
- Hammedi, W.; Brik, B.; Senouci, S.M. Toward Optimal MEC-Based Collision Avoidance System for Cooperative Inland Vessels: A Federated Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2022, 1–13. [Google Scholar] [CrossRef]
- Su, Y.; Li, J.; Li, Y.; Su, Z. Edge-enabled: A Scalable and Decentralized Data Aggregation Scheme for IoT. IEEE Trans. Ind. Inform. 2022, 1. [Google Scholar] [CrossRef]
- Yuan, L.; He, Q.; Chen, F.; Zhang, J.; Qi, L.; Xu, X.; Xiang, Y.; Yang, Y. CSEdge: Enabling Collaborative Edge Storage for Multi-Access Edge Computing Based on Blockchain. IEEE Trans. Parallel Distrib. Syst. 2022, 33, 1873–1887. [Google Scholar] [CrossRef]
- He, Y.; Wang, Y.; Qiu, C.; Lin, Q.; Li, J.; Ming, Z. Blockchain-Based Edge Computing Resource Allocation in IoT: A Deep Reinforcement Learning Approach. IEEE Internet Things J. 2021, 8, 2226–2237. [Google Scholar] [CrossRef]
- Ni, Q.; Linfeng, Z.; Zhu, X.; Ali, I. A Novel Design Method of High Throughput Blockchain for 6G Networks: Performance Analysis and Optimization Model. IEEE Internet Things J. 2022, 1. [Google Scholar] [CrossRef]
- Guo, S.; Dai, Y.; Guo, S.; Qiu, X.; Qi, F. Blockchain Meets Edge Computing: Stackelberg Game and Double Auction Based Task Offloading for Mobile Blockchain. IEEE Trans. Veh. Technol. 2020, 69, 5549–5561. [Google Scholar] [CrossRef]
- Guo, S.; Hu, X.; Guo, S.; Qiu, X.; Qi, F. Blockchain Meets Edge Computing: A Distributed and Trusted Authentication System. IEEE Trans. Ind. Inform. 2020, 16, 1972–1983. [Google Scholar] [CrossRef]
- Wu, H.; Wolter, K.; Jiao, P.; Deng, Y.; Zhao, Y.; Xu, M. EEDTO: An Energy-Efficient Dynamic Task Offloading Algorithm for Blockchain-Enabled IoT-Edge-Cloud Orchestrated Computing. IEEE Internet Things J. 2021, 8, 2163–2176. [Google Scholar] [CrossRef]
- Sheng, H.; Wang, S.; Zhang, Y.; Yu, D.; Cheng, X.; Lyu, W.; Xiong, Z. Near-Online Tracking with Co-Occurrence Constraints in Blockchain-Based Edge Computing. IEEE Internet Things J. 2021, 8, 2193–2207. [Google Scholar] [CrossRef]
- Hosseini-Fahraji, A.; Loghmannia, P.; Zeng, K.; Li, X.; Yu, S.; Sun, S.; Wang, D.; Yang, Y.; Manteghi, M.; Zuo, L. Energy Harvesting Long-Range Marine Communication. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 2036–2045. [Google Scholar] [CrossRef]
- Khan, A.; Khan, M.; Ahmed, S.; Iqbal, N.; Abd Rahman, M.A.; Abdul Karim, M.K.; Mustafa, M.S.; Yaakob, Y. EH-IRSP: Energy Harvesting Based Intelligent Relay Selection Protocol. IEEE Access 2021, 9, 64189–64199. [Google Scholar] [CrossRef]
- Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.S. Localization of Energy Harvesting Empowered Underwater Optical Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2019, 18, 2652–2663. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Yadav, A.; Makled, E.A.; Dobre, O.A.; Zhao, R.; Varshney, P.K. Optimal Power Allocation for Full-Duplex Underwater Relay Networks with Energy Harvesting: A Reinforcement Learning Approach. IEEE Wirel. Commun. Lett. 2020, 9, 223–227. [Google Scholar] [CrossRef]
- Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.S. Energy harvesting hybrid acoustic-optical underwater wireless sensor networks localization. Sensors 2017, 18, 51. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Zhang, H.; Wang, L.; Liu, G. A contact-mode triboelectric nanogenerator for energy harvesting from marine pipe vibrations. Sensors 2021, 21, 1514. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Huang, J.; Feng, B.; Zhang, F.; Zhang, Y.; Li, X.; Jian, J.; Wang, Z.; Tong, X. Undersea Wireless Power and Data Transfer System with Shared Channel Powered by Marine Renewable Energy System. IEEE J. Emerg. Sel. Top. Circuits Syst. 2022, 12, 242–250. [Google Scholar] [CrossRef]
- Shin, Y.; Woo, S.; Lee, C.; Jeong, J.; Kwak, G.; Ahn, S. Design of a Wireless Power Transfer System with Two Inputs with Large Voltage Differences for Missiles Mounted on Maritime Vessels. IEEE Access 2022, 10, 70825–70839. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, X.; Zhu, Z.; Yan, Z.; Song, B.; Mi, C.C. A New Coil Structure to Reduce Eddy Current Loss of WPT Systems for Underwater Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 245–253. [Google Scholar] [CrossRef]
- Huang, A.; Huang, M.; Shao, Z.; Zhang, X.; Wu, D.; Cao, C. A Practical Marine Wireless Sensor Network Monitoring System Based on LoRa and MQTT. In Proceedings of the 2019 IEEE 2nd International Conference on Electronics Technology (ICET), Malang, Indonesia, 4–5 October 2019; pp. 330–334. [Google Scholar] [CrossRef] [Green Version]
- Zong, K. Marine resource exploration streamer control model based on artificial neural network. J. Coast. Res. 2020, 103, 855–859. [Google Scholar] [CrossRef]
- Wenzhi, Z.; Suyun, H.; Wei, L.; Tongshan, W.; Yongxin, L. Petroleum geological features and exploration prospect of deep marine carbonate rocks in China onshore: A further discussion. Nat. Gas Ind. B 2014, 1, 14–23. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Ling, M.; Zhu, T.; Xu, D. Safety Analysis of Shrinkage Monitoring Equipment in Marine Resource Exploration. J. Coast. Res. 2020, 105, 242–245. [Google Scholar] [CrossRef]
- Pan, L. Exploration and mining learning robot of autonomous marine resources based on adaptive neural network controller. Pol. Marit. Res. 2018, 25, 78–83. [Google Scholar] [CrossRef] [Green Version]
- Lyu, L.; Dai, Y.; Cheng, N.; Zhu, S.; Guan, X.; Lin, B.; Shen, X. AoI-aware co-design of cooperative transmission and state estimation for marine IoT systems. IEEE Internet Things J. 2020, 8, 7889–7901. [Google Scholar] [CrossRef]
- Zeng, C.; Wang, J.B.; Ding, C.; Zhang, H.; Lin, M.; Cheng, J. Joint optimization of trajectory and communication resource allocation for unmanned surface vehicle enabled maritime wireless networks. IEEE Trans. Commun. 2021, 69, 8100–8115. [Google Scholar] [CrossRef]
- Arienzo, L. Green RF/FSO communications in cognitive relay-based space information networks for maritime surveillance. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 1182–1193. [Google Scholar] [CrossRef]
- Yang, T.; Gao, S.; Li, J.; Qin, M.; Sun, X.; Zhang, R.; Wang, M.; Li, X. Multi-Armed Bandits Learning for Task Offloading in Maritime Edge Intelligence Networks. IEEE Trans. Veh. Technol. 2022, 71, 4212–4224. [Google Scholar] [CrossRef]
- Duan, R.; Wang, J.; Zhang, H.; Ren, Y.; Hanzo, L. Joint multicast beamforming and relay design for maritime communication systems. IEEE Trans. Green Commun. Netw. 2019, 4, 139–151. [Google Scholar] [CrossRef] [Green Version]
- Alcaraz, C.; Lopez, J. Digital Twin: A Comprehensive Survey of Security Threats. IEEE Commun. Surv. Tutor. 2022, 24, 1475–1503. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, K.; Zhang, Y. Digital Twin Networks: A Survey. IEEE Internet Things J. 2021, 8, 13789–13804. [Google Scholar] [CrossRef]
- Dai, M.; Wang, T.; Li, Y.; Wu, Y.; Qian, L.; Su, Z. Digital Twin Envisioned Secure Air-Ground Integrated Networks: A Blockchain-Based Approach. IEEE Internet Things Mag. 2022, 5, 96–103. [Google Scholar] [CrossRef]
- Fan, B.; Wu, Y.; He, Z.; Chen, Y.; Quek, T.Q.; Xu, C.Z. Digital Twin Empowered Mobile Edge Computing for Intelligent Vehicular Lane-Changing. IEEE Netw. 2021, 35, 194–201. [Google Scholar] [CrossRef]
- Duong, T.Q.; Van Huynh, D.; Li, Y.; Garcia-Palacios, E.; Sun, K. Digital Twin-enabled 6G Aerial Edge Computing with Ultra-Reliable and Low-Latency Communications: (Invited Paper). In Proceedings of the 2022 1st International Conference on 6G Networking (6GNet), Paris, France, 6–8 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, X.; Zhang, K.; Maharjan, S.; Zhang, Y. Communication-Efficient Federated Learning for Digital Twin Edge Networks in Industrial IoT. IEEE Trans. Ind. Inform. 2021, 17, 5709–5718. [Google Scholar] [CrossRef]
- Liu, J.; Li, C.; Bai, J.; Luo, Y.; Lv, H.; Lv, Z. Security in IoT-Enabled Digital Twins of Maritime Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2021, 1–9. [Google Scholar] [CrossRef]
- Wen, J.; Yang, J.; Li, Y.; He, J.; Li, Z.; Song, H. Behavior-Based Formation Control Digital Twin for Multi-AUG in Edge Computing. IEEE Trans. Netw. Sci. Eng. 2022, 1–11. [Google Scholar] [CrossRef]
- Sun, S.; Wang, H.; Zhang, H.; Li, M.; Xiang, M.; Luo, C.; Ren, P. Underwater Image Enhancement with Reinforcement Learning. IEEE J. Ocean. Eng. 2022, 1–13. [Google Scholar] [CrossRef]
- Wang, N.; Gao, Y.; Zhang, X. Data-Driven Performance-Prescribed Reinforcement Learning Control of an Unmanned Surface Vehicle. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5456–5467. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.; Li, G.; Han, P.; Skulstad, R.; Chen, S.; Zhang, H. Data-Driven Modeling for Transferable Sea State Estimation Between Marine Systems. IEEE Trans. Intell. Transp. Syst. 2022, 23, 2561–2571. [Google Scholar] [CrossRef]
- Zurowietz, M.; Nattkemper, T.W. Unsupervised Knowledge Transfer for Object Detection in Marine Environmental Monitoring and Exploration. IEEE Access 2020, 8, 143558–143568. [Google Scholar] [CrossRef]
- Guo, J.; Guan, J. Classification of Marine Plankton Based on Few-shot Learning. Arab. J. Sci. Eng. 2021, 46, 9253–9262. [Google Scholar] [CrossRef]
- Zhang, P.; Bai, Y.; Wang, D.; Bai, B.; Li, Y. Few-Shot Classification of Aerial Scene Images via Meta-Learning. Remote Sens. 2021, 13, 108. [Google Scholar] [CrossRef]
- Zeng, D.; Gu, L.; Guo, S.; Cheng, Z.; Yu, S. Joint optimization of task scheduling and image placement in fog computing supported software-defined embedded system. IEEE Trans. Comput. 2016, 65, 3702–3712. [Google Scholar] [CrossRef]
- Su, X.; Meng, L.; Huang, J. Intelligent Maritime Networking with Edge Services and Computing Capability. IEEE Trans. Veh. Technol. 2020, 69, 13606–13620. [Google Scholar] [CrossRef]
- Munusamy, A.; Adhikari, M.; Khan, M.A.; Menon, V.G.; Srirama, S.N.; Alex, L.T.; Khosravi, M.R. Edge-Centric Secure Service Provisioning in IoT-Enabled Maritime Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2021, 1–10. [Google Scholar] [CrossRef]
- Wen, J.; Yang, J.; Wei, W.; Lv, Z. Intelligent Multi-AUG Ocean Data Collection Scheme in Maritime Wireless Communication Network. IEEE Trans. Netw. Sci. Eng. 2022, 9, 3067–3079. [Google Scholar] [CrossRef]
- Xie, H.; Qin, Z.; Li, G.Y.; Juang, B.H. Deep learning enabled semantic communication systems. IEEE Trans. Signal Process. 2021, 69, 2663–2675. [Google Scholar] [CrossRef]
- Shi, G.; Xiao, Y.; Li, Y.; Xie, X. From semantic communication to semantic-aware networking: Model, architecture, and open problems. IEEE Commun. Mag. 2021, 59, 44–50. [Google Scholar] [CrossRef]
- Zhang, H.; Shao, S.; Tao, M.; Bi, X.; Letaief, K.B. Deep Learning-Enabled Semantic Communication Systems with Task-Unaware Transmitter and Dynamic Data. arXiv 2022, arXiv:2205.00271. [Google Scholar]
- Xie, H.; Qin, Z. A lite distributed semantic communication system for internet of things. IEEE J. Sel. Areas Commun. 2020, 39, 142–153. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Feature | Reference | Main Contributions |
|---|---|---|
| UAV networks | [11] | Reviewed the fundamental tradeoffs in UAV-enabled wireless networks. |
| [12] | Reviewed the general UAV networking related requirements and characteristics. | |
| Space–air–ground integrated networks (SAGINs) | [4] | Reviewed the state-of-the-art of security issues for SAGINs. |
| [13] | Reviewed the promising blockchain-based solutions for SAG–IoT security. | |
| Satellite/air–ground networks | [14] | Reviewed the UAV-assisted air-ground integrated mobile edge networks. |
| [15] | Reviewed the communication demand in satellite-terrestrial maritime communication networks | |
| Satellite–air–sea integrated networks for smart oceans | Our work | Surveyed the architecture of the ISCCNs for smart oceans from four domains and five aspects and provided the state-of-the- art marine sensing, communication, and computing paradigms for smart oceans. |
| Acronyms | Meanings | Acronyms | Meanings |
|---|---|---|---|
| AI | Artificial intelligence | NOMA | Nonorthogonal multiple access |
| AUG | Automatic underwater glider | OFDMA | Orthogonal frequency division multiple access |
| AUV | Autonomous underwater vehicle | QoS | Quality of service |
| BS | Base station | RF | Radio frequency |
| B-UAV | Bottom-UAV | RL | Reinforcement learning |
| CET | Cloud–edge–terminal | RSS | Received signal strength |
| DT | Digital twin | SAGE | Space–air–ground–edge |
| EE | Energy efficiency | SAGIN | Space–air–ground integrated network |
| EOCA | Energy optimization clustering algorithm | SDN | Software-defined networking |
| FL | Federated learning | SN | Sink node |
| IoT | Internet of Things | SWIPT | Simultaneous wireless information and power transfer |
| IRS | Intelligent reflecting surface | TDMA | Time division multiple access |
| ISAC | Integrated sensing and communication | TENG | Triboelectric nanogenerator |
| ISCCN | Integrated sensing, communication, and computing network | T-UAV | Top-UAV |
| LSTM | Long short-term memory | UAV | Unmanned aerial vehicle |
| MEC | Mobile edge computing | UASN | Underwater acoustic sensor network |
| MEC3 | Mobile edge communications, computing, and caching | USN | Underwater sensor node |
| M-IoT | Marine Internet of Things | USV | Unmanned surface vehicle |
| MWN | Maritime wireless network | UWSN | Underwater wireless sensor network |
| NDN | Named data networking | UWA-CSN | Underwater acoustic cooperative sensor network |
| NFV | Network function virtualization | WPT | Wireless power transfer |
| Category | Ref. | Framework | Performance Metrics |
|---|---|---|---|
| Sea–Air | [16] | USN–USV | Minimize energy consumption and data loss |
| [17] | Buoys–UAV | Minimize the energy consumption | |
| [18] | USV–USV | Minimize energy consumption | |
| [19] | USV–UAV | Minimize the overall execution time | |
| [20] | USV–EN | Minimize the energy consumption and delay | |
| [21] | USN–SN–UAV | Minimize the energy consumption | |
| [22] | USV–USV–EN | Minimize total delay | |
| [23] | USV–USV–Cloud | Minimize the total cost | |
| [24] | USV–UAV–UAV | Minimize latency | |
| Sea–Ground–Air | [25] | USV–UAV–BS | Minimize average delay |
| [26] | USN–USV–UAV | Maximize network lifetime | |
| [27] | USV–Edge–Cloud | Tradeoff between latency and energy consumption | |
| [28] | USV–Edge–Cloud | Minimize weighted energy consumption and delay | |
| [29] | USV–Edge–Cloud | Optimize the resource management | |
| Sea–Ground– Air–Space | [30] | Space–Air–Ground–Sea | Computing services |
| [31] | Space–Air–Ground–Sea | Hybrid computing services | |
| [32] | Space–Air–Ground–Sea | AI-empowered maritime network |
| Category | 5G-Enabled M-IoTs | 6G-Enabled M-IoT |
|---|---|---|
| Satellite Integration | N | Y |
| Service Objects | Connections for People and Maritime Things | Interactions for People and Maritime World |
| Traffic Capacity | 10 Mbps/m | About 1–10 Gbps/m |
| Peak Data Rate | 20 Gbps | ≥1 Tbps |
| Uniform User Experience | 50 Mpbs 2D everywhere | 10 Gpbs 3D everywhere |
| Latency | 1 msec | 0.1 msec |
| Energy/bit | Not Specified | 1 pJ/bit |
| Localization Precision | 10 cm on 2D | 1 cm on 3D |
| Mobility Support | 500 km/h | ≥1000 km/h |
| Application Scenario | Maritime Internet of Things | Maritime Internet of Everything |
| Support Underwater Communications | Efficient Underwater Communications | |
| Remote Deep Sea Navigation | Autonomous Deep Sea Navigation |
| Topic Focused on | Network Model | Ref. | Optimization Objective | Proposed Approach |
|---|---|---|---|---|
| ISAC-enabled marine sensing technology | Integrated periodic sensing and communication | [34] | System achievable rate | Two-layer penalty-based algorithm |
| UAVs-enabled aerial dual-functional access points | [35] | Average weighted sum-rate throughput | Successive convex approximation and semidefinite relaxation | |
| IRS-assisted performance improvement | [37] | Energy consumption | Block coordinate descent and difference-convex programming | |
| ISAC-assisted data offloading | [38] | Energy consumption | Block coordinate descent | |
| IRS-enabled marine surface communications | UAV-enabled IRS- assisted IoT communication | [46] | Energy consumption | Adaptive whale optimization algorithm and elastic ring self-organizing map algorithm |
| IRS-assisted master–auxiliary UAV network | [47] | Total throughput | Preactivation penalty multiagent deep deterministic policy gradient | |
| UAV-assisted IRS for SWIPT | [50] | Minimum average achievable rate | Successive convex approximation and block coordinate descent | |
| NOMA and energy harvesting model | [51] | Achievable sum-rate maximization | Successive convex approximation penalty function method and difference-convex programming |
| Topic Focused on | Solutions | Ref. | Proposal |
|---|---|---|---|
| Multiple access | NOMA transmission | [65] | NOMA-based maritime UAV communication model for maximizing the minimum ship throughput |
| FDMA transmission | [70] | Single-carrier FDMA design for underwater acoustic communications | |
| OFDMA transmission | [22] | Multiaccess edge computing offloading based on OFDMA technology for alleviating the congestion of data unloading | |
| OFDM transmission | [18] | OFDM-based maritime broadband MEC system model for task offloading | |
| Performance evaluation | Energy optimization | [71] | An improved energy optimization clustering algorithm for the multihop underwater acoustic cooperative sensor networks |
| [72] | Energy-efficient image recognition system for ensuring a high recognition accuracy | ||
| Delay optimization | [27] | Two-stage offloading optimization for energy–latency tradeoff in M-IoTs | |
| [73] | Shipping lane approach for optimizing the route selection in delay-tolerant routing | ||
| Resource allocation | Channel allocation | [74] | An energy-efficient channel allocation- based data aggregation |
| Computing offloading allocation | [75] | Energy harvesting for MEC-enabled maritime task offloading | |
| Power allocation | [76] | QoS-guarantee power optimization for improving the NOMA transmission rate for each beam | |
| Task allocation | [77] | A novel task-allocation-scheme-based game theory for smart ocean IoT |
| Topic Focused on | Purpose | Ref. | Proposal |
|---|---|---|---|
| FL for aerial networks | Counter potential security and privacy threats | [117] | Propose a secure FL framework for UAV-assisted mobile crowdsensing |
| Predict the air quality index accurately and timely | [118] | Propose a new FL-based aerial–ground air quality sensing framework | |
| Improve the reliability and efficiency of data sharing | [119] | Develop an asynchronous FL framework for multi-UAV-enabled networks | |
| Mitigate resource consumption for UAVs and user devices | [120] | Propose deep-reinforcement-learning-based framework to enable sustainable FL with energy-harvesting user devices | |
| Realize the dynamic resource allocation | [121] | Design an FL-based multiagent method for realizing information interaction and combined dispatching in UAV networks | |
| Address jamming attack detection in flying ad hoc network | [122] | Propose an FL-based on-device jamming attack detection security architecture for flying ad hoc network | |
| FL for marine networks | Solve the problem of worker selection in FL | [123] | Propose a secure sharing method for M-IoT under an edge computing framework based on FL |
| Address multiagent cooperation and privacy protection issues | [124] | Propose a part-FL scheme combining the advantages of FL algorithm and split learning algorithm | |
| Diagnose device failures in Internet of Ships | [125] | Design the Paillier-based communication scheme to encrypt the transmission parameters in Internet of Ships | |
| Predict the ships’ positions securely | [126] | Propose a new cooperative collision avoidance system based on FL for inland ships at MEC level |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, M.; Li, Y.; Li, P.; Wu, Y.; Qian, L.; Lin, B.; Su, Z. A Survey on Integrated Sensing, Communication, and Computing Networks for Smart Oceans. J. Sens. Actuator Netw. 2022, 11, 70. https://doi.org/10.3390/jsan11040070
Dai M, Li Y, Li P, Wu Y, Qian L, Lin B, Su Z. A Survey on Integrated Sensing, Communication, and Computing Networks for Smart Oceans. Journal of Sensor and Actuator Networks. 2022; 11(4):70. https://doi.org/10.3390/jsan11040070
Chicago/Turabian StyleDai, Minghui, Yang Li, Peichun Li, Yuan Wu, Liping Qian, Bin Lin, and Zhou Su. 2022. "A Survey on Integrated Sensing, Communication, and Computing Networks for Smart Oceans" Journal of Sensor and Actuator Networks 11, no. 4: 70. https://doi.org/10.3390/jsan11040070