
Qualitative Analysis of Tree Canopy Top Points Extraction from Different Terrestrial Laser Scanner Combinations in Forest Plots
 ,
,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data Acquisition and Pre-Processing
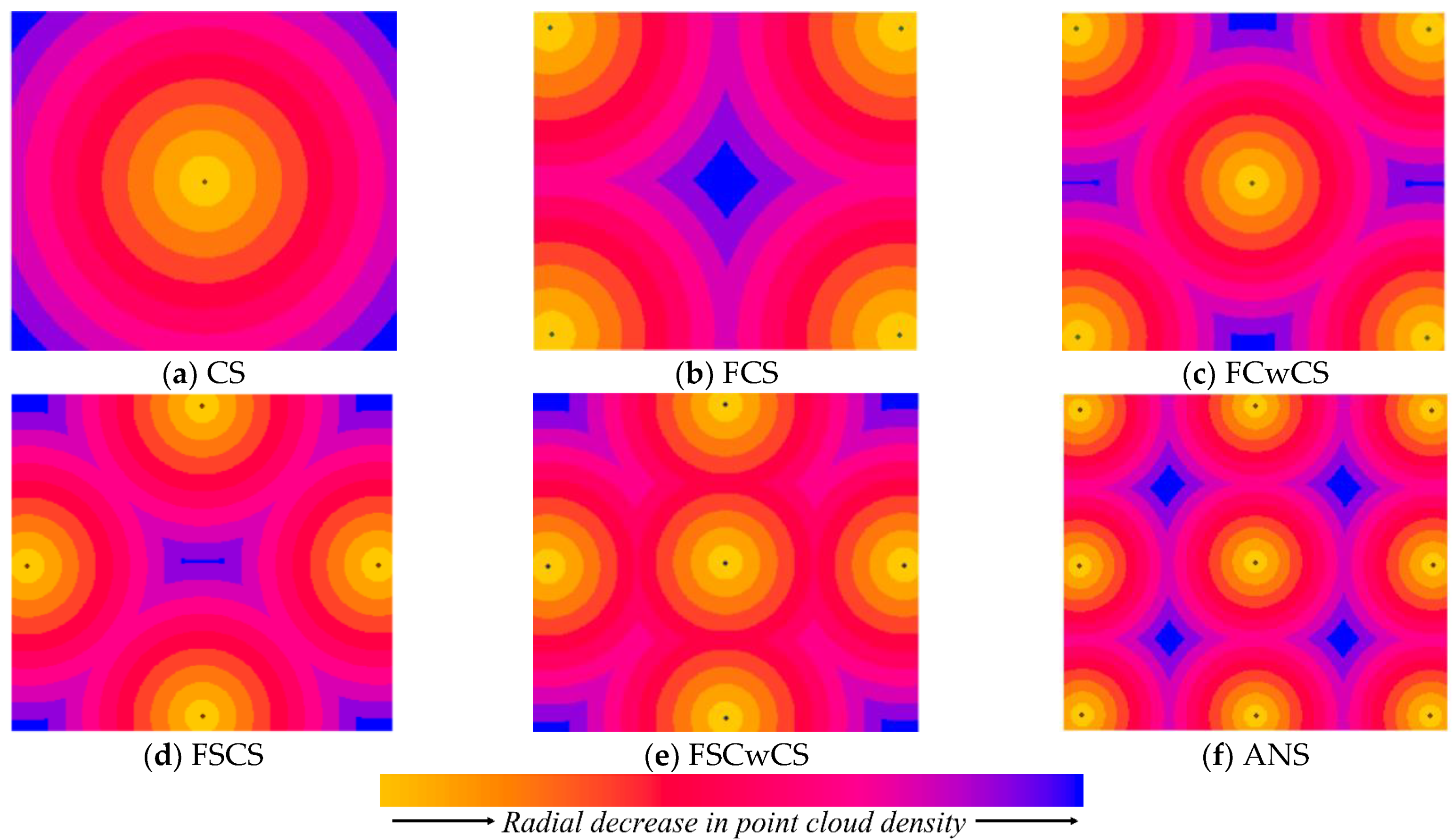
2.2.1. CS Combination
2.2.2. FCS Combination
2.2.3. FCwCS Combination
2.2.4. FSCS Combination
2.2.5. FSCwCS Combination
2.2.6. ANS Combination
2.3. Research Methodology
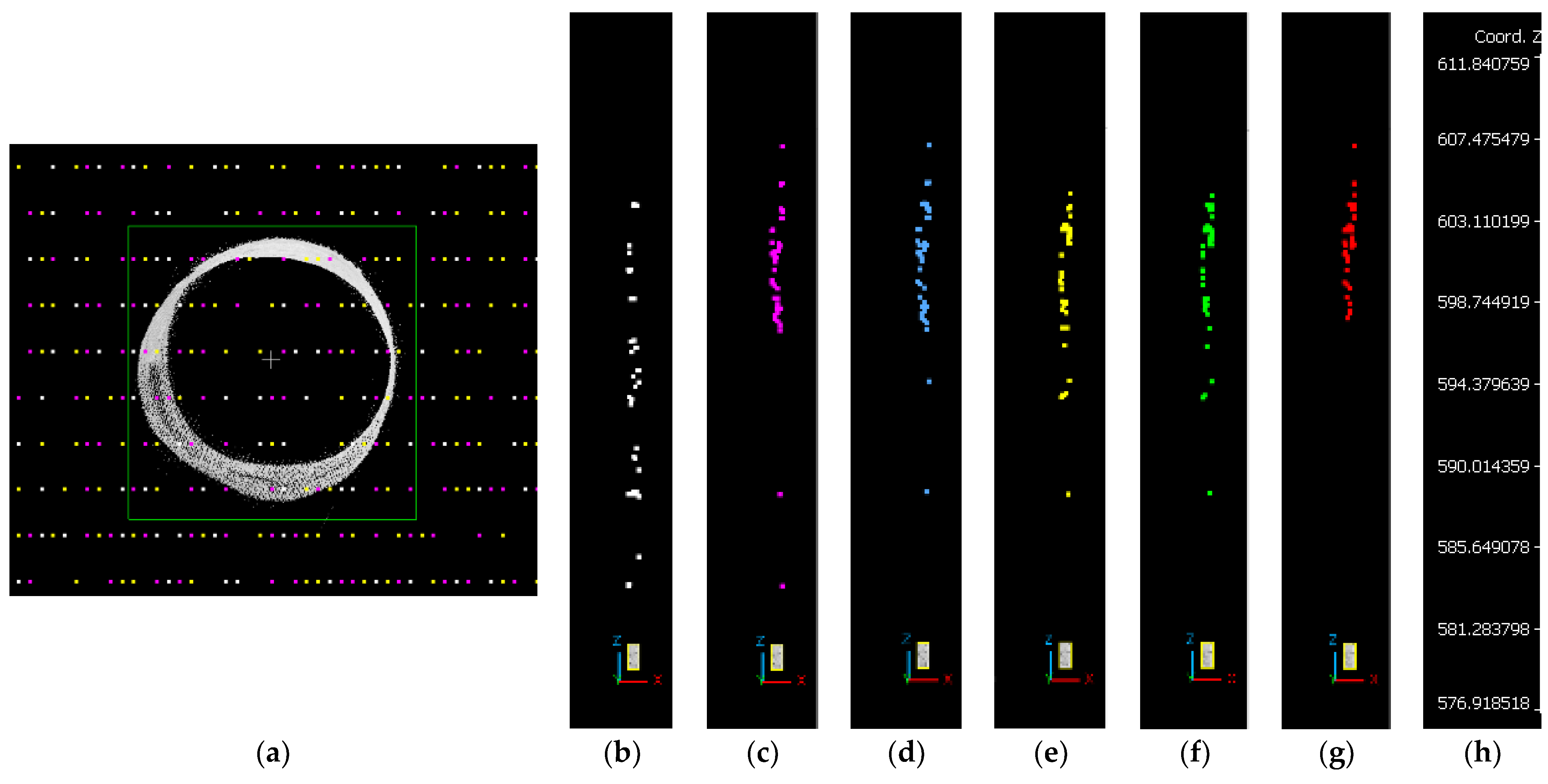
2.3.1. Canopy Top Points Extraction at Each Stem Local Grid Positions
2.3.2. Data Evaluation
- is the actual observation (m),
- is the estimated observation (m), and
- N is the total number of observations.
3. Results
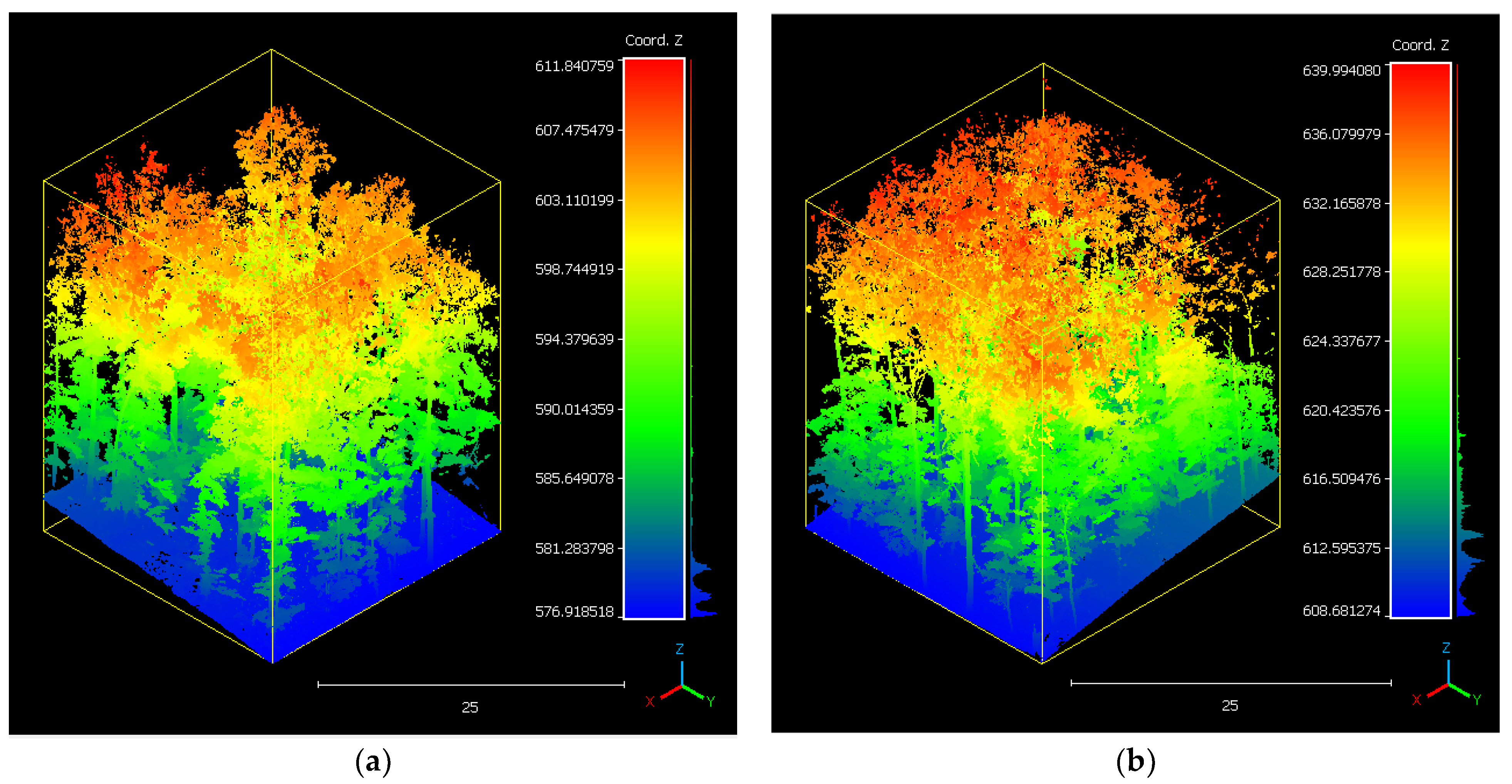
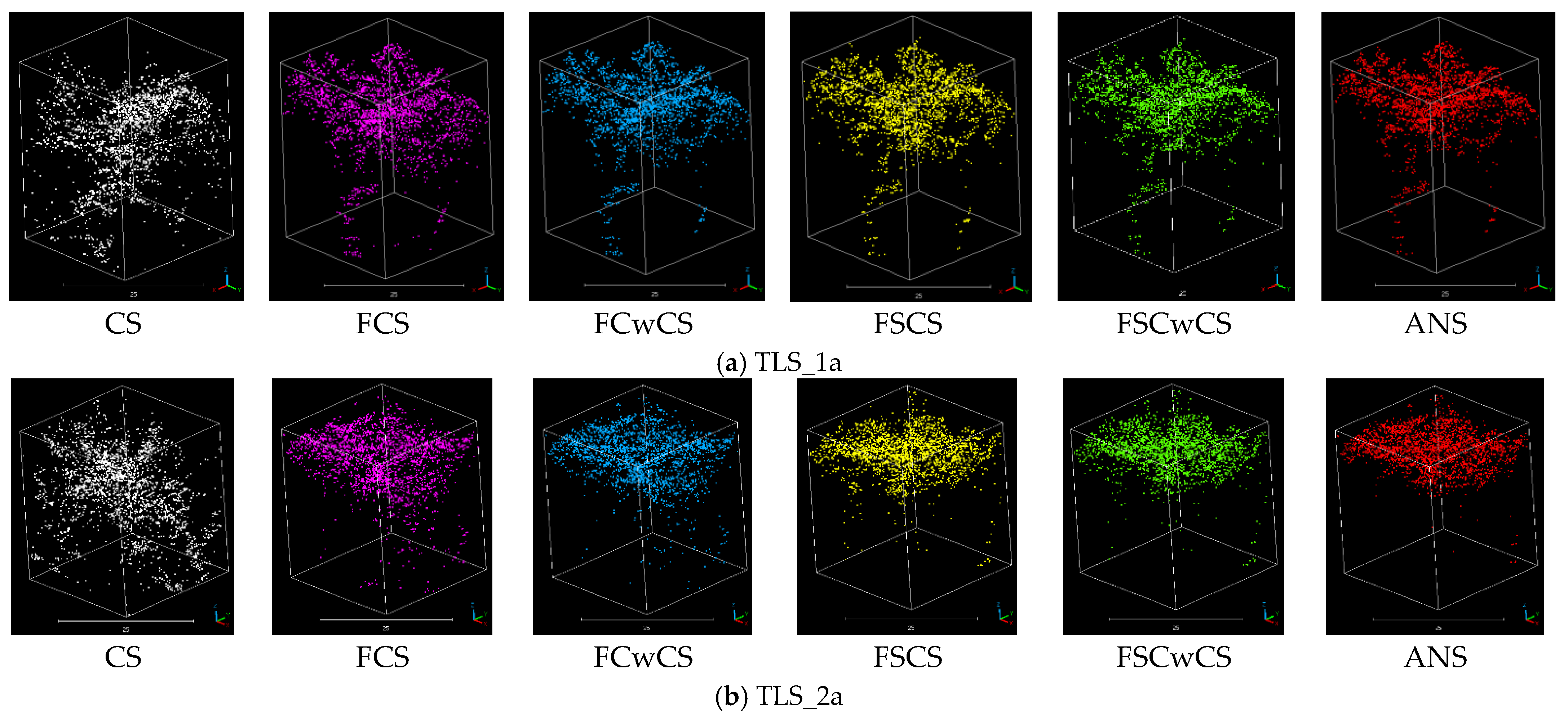
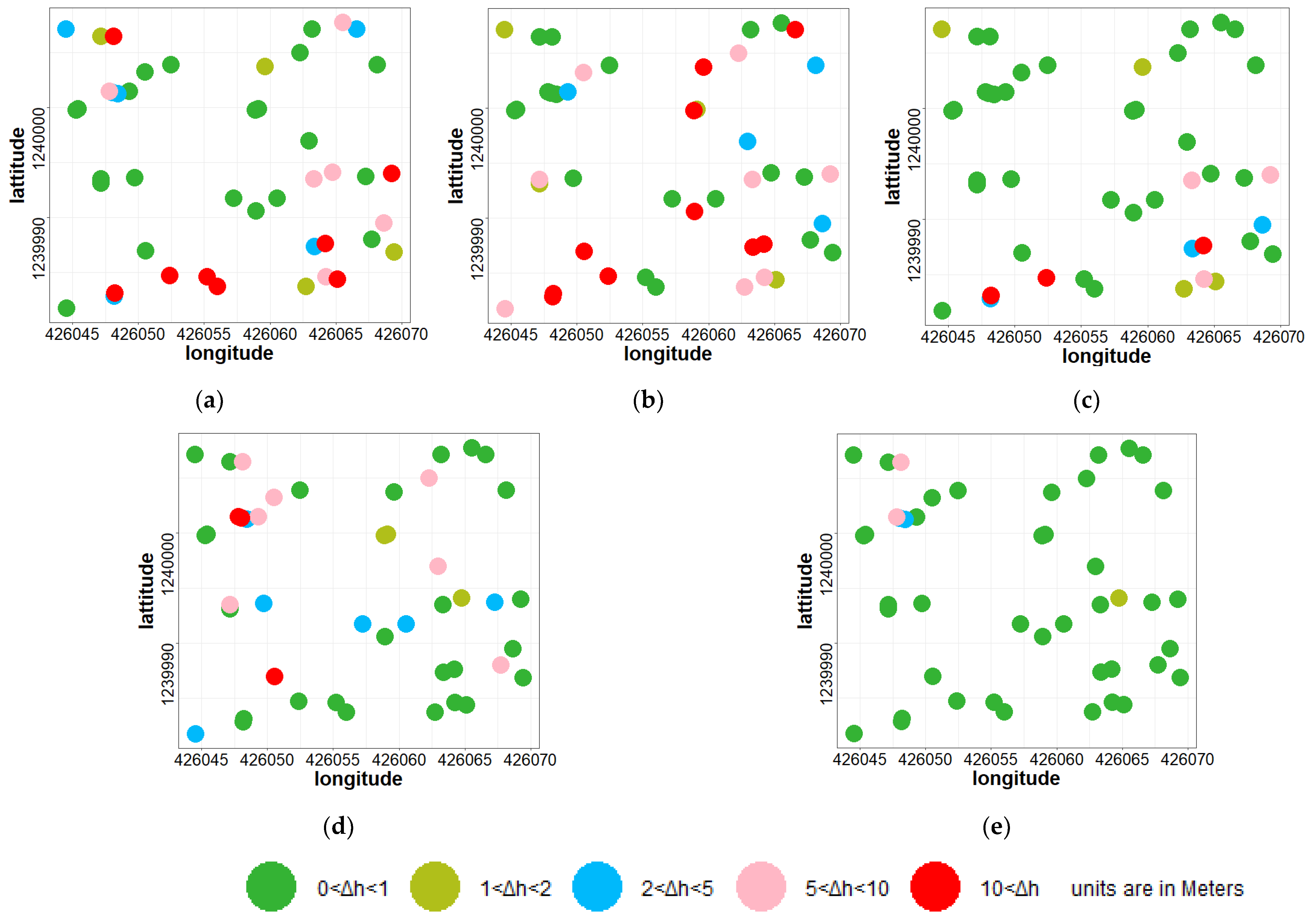
3.1. Spatial Analysis for Forest Plot TLS_1a
Canopy Top Height Differences for Forest Plot TLS_1a
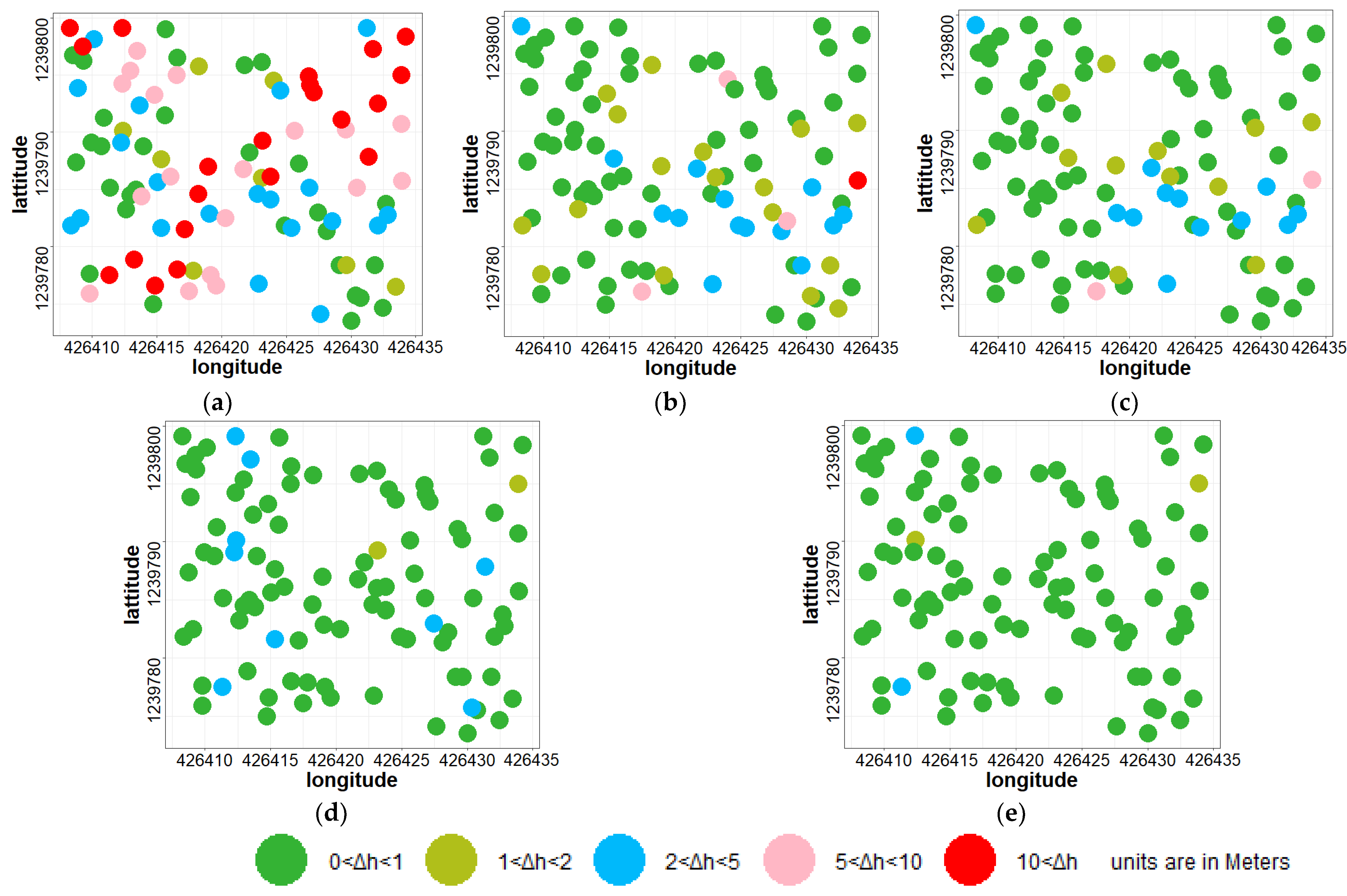
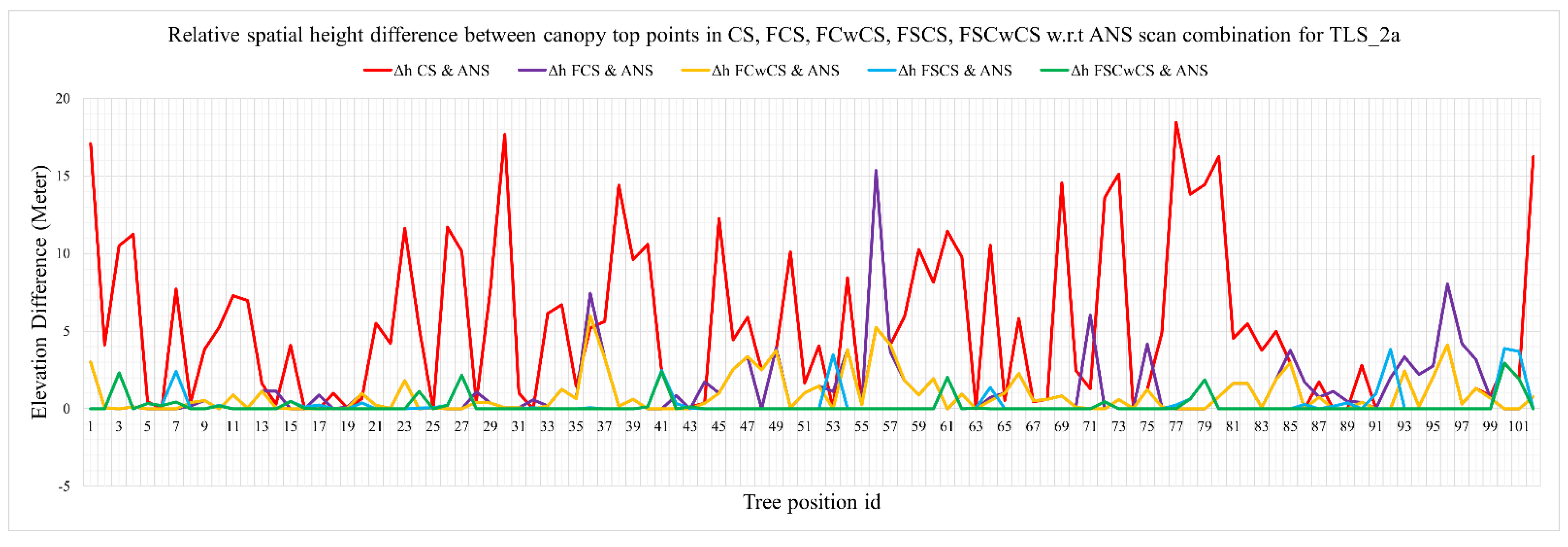
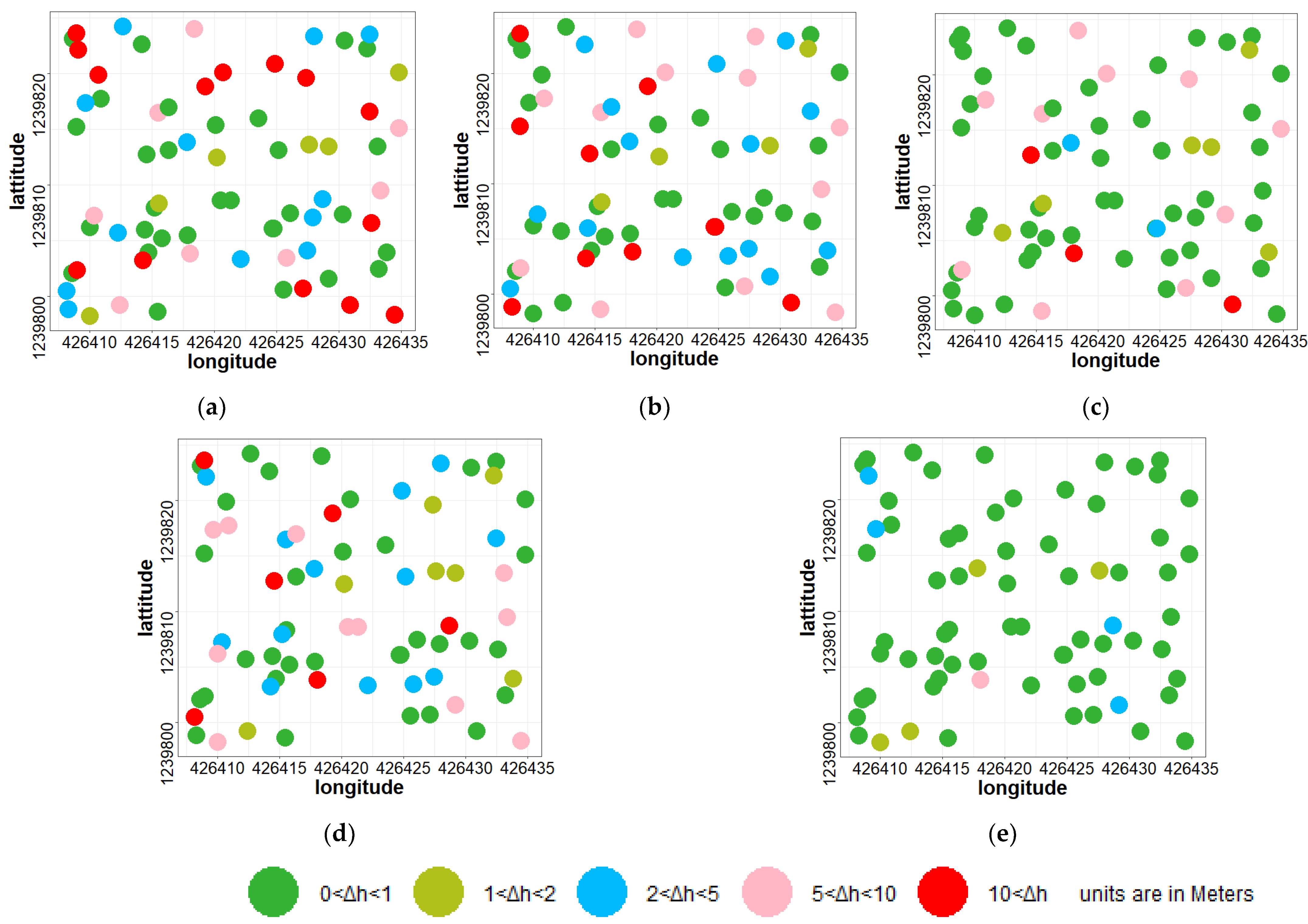
3.2. Spatial Analysis for Forest Plot TLS_2a
Spatial Canopy Top Height Differences for Forest Plot TLS_2a
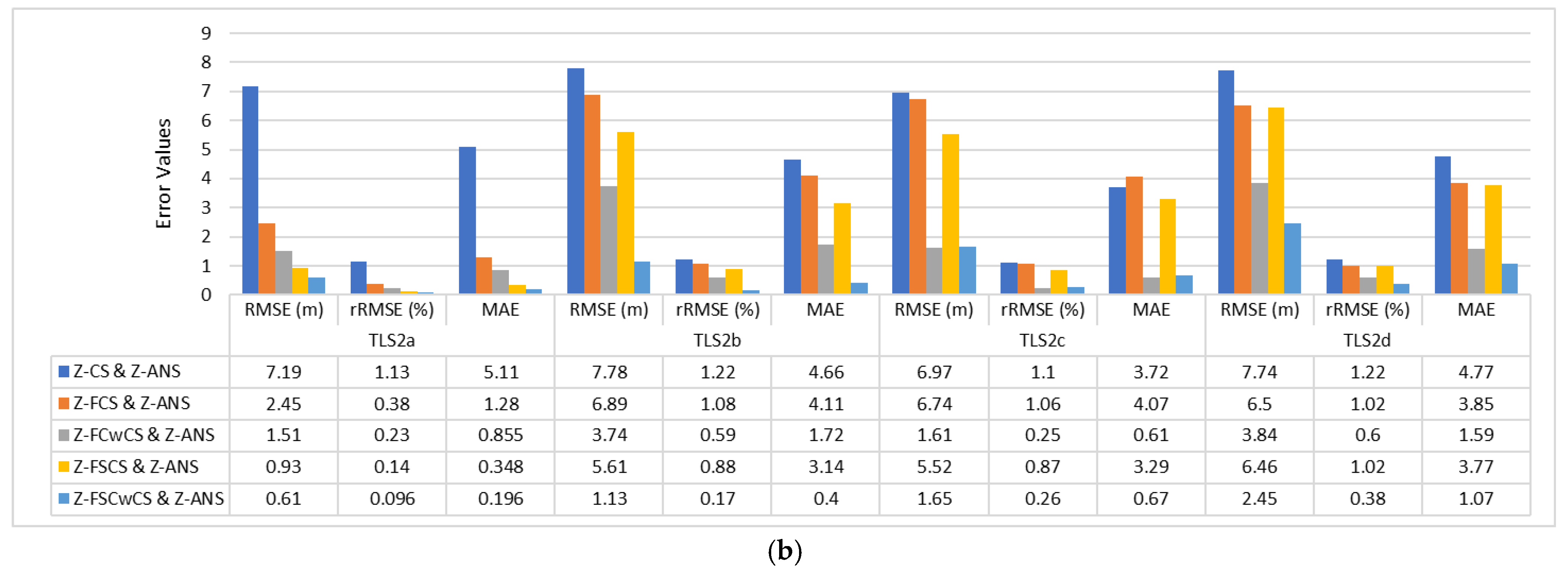
3.3. Qualitative Statistical Analysis for the Relative Canopy Heights
4. Discussions
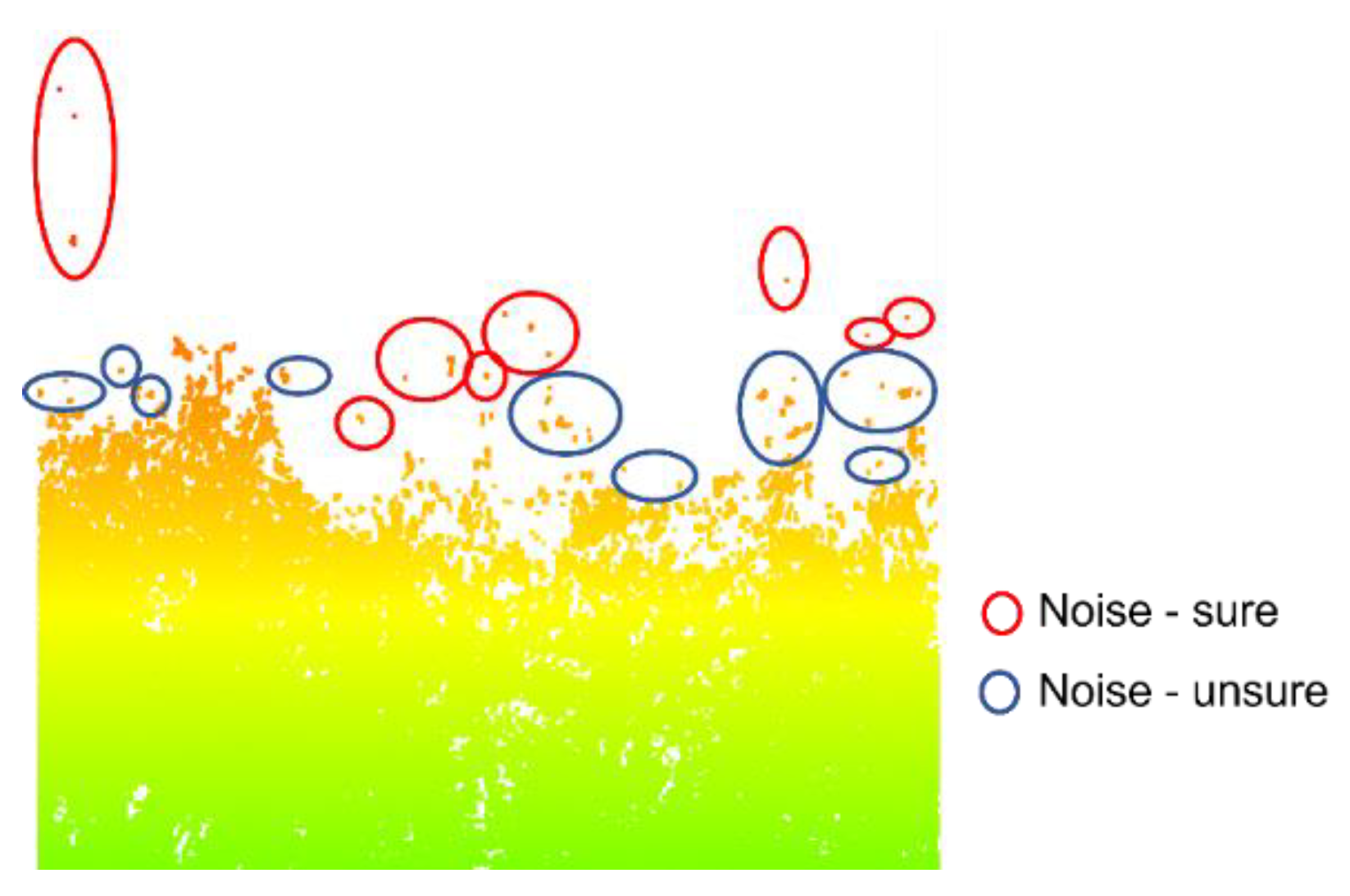
4.1. Noise Removal above the Canopy Regions
4.2. Selection of Grid Size for Canopy Top Points Extraction in Dendrocloud
4.3. Highest Point Extraction at Each Tree Stem Position
4.4. Effect of Number of Scans and Position of Scans on the Point Cloud Generation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Statistical Errors Obtained for Plots TLS_Plot1 and TLS_Plot2


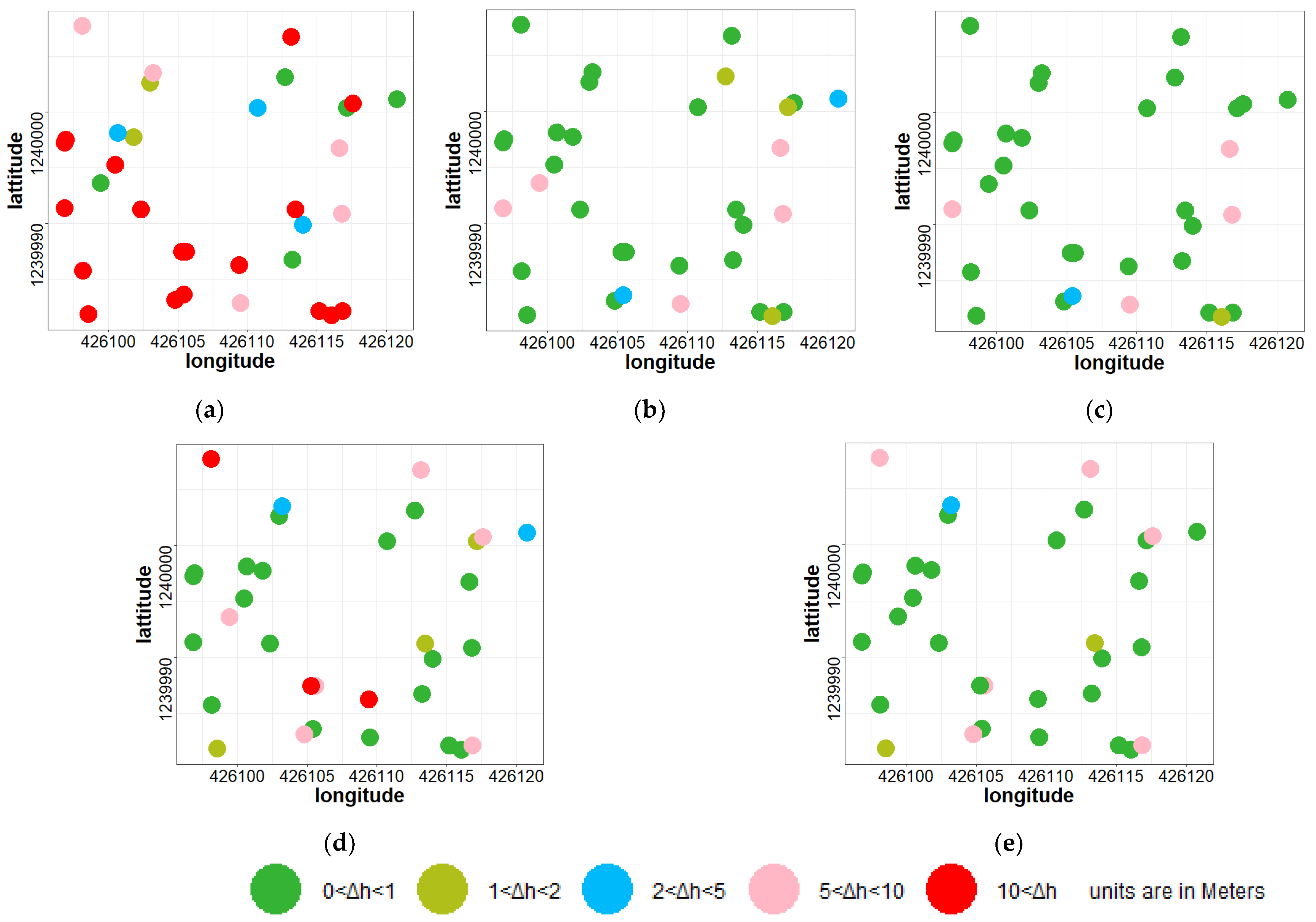
Appendix A.2. Spatial Analysis for Forest Plot TLS_1b

Spatial Canopy Top Height Differences for Forest Plot TLS_1b

Appendix A.3. Spatial Analysis for Forest Plot TLS_1c

Spatial Canopy Top Height Differences for Forest Plot TLS_1c

Appendix A.4. Spatial Analysis for Forest Plot TLS_1d

Spatial Canopy Top Height Differences for Forest Plot TLS_1d

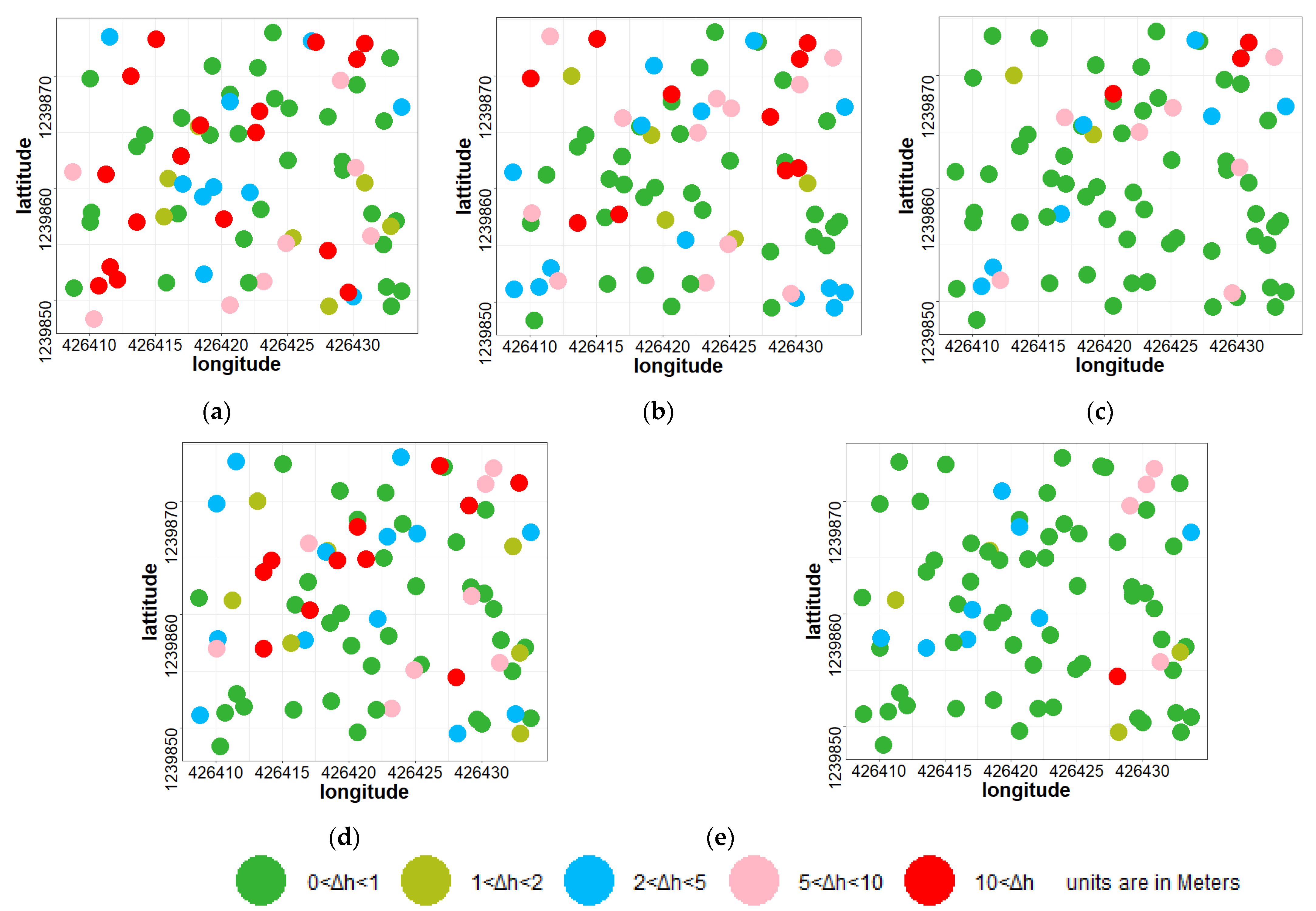
Appendix A.5. Spatial Analysis for Forest Plot TLS_2b

Spatial Canopy Top Height Differences for Forest Plot TLS_2b

Appendix A.6. Spatial Analysis for Forest Plot TLS_2c

Spatial Canopy Top Height Differences for Forest Plot TLS_2c

Appendix A.7. Spatial Analysis for Forest Plot TLS_2d

Spatial Canopy Top Height Differences for Forest Plot TLS_2d


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.no. | Terms | Df | Sum Sq | Mean Sq | F Value | Pr (>F) |
|---|---|---|---|---|---|---|
| 1 | Combination | 5 | 9171 | 1834 | 67.015 | <2 × 10−16 *** |
| 2 | Plot | 7 | 577,370 | 82,481 | 3013.445 | <2 × 10−16 *** |
| 3 | Combination: Plot | 35 | 3057 | 87 | 3.191 | 1.04 × 10−9 *** |
| 4 | Residuals | 2874 | 78,665 | 27 | NA | NA |
| Terms | Combination. diff | Combination. lwr | Combination. upr | Combination.p.adj |
|---|---|---|---|---|
| Z.CS-Z.ANS | 5.321615678 | −6.277687548 | −4.365543809 | 0 |
| Z.FCS-Z.ANS | −3.110681938 | −4.066753807 | −2.154610069 | 0 |
| Z.FCwCS-Z.ANS | −1.21057849 | −2.166650359 | −0.25450662 | 0.004199711 |
| Z.FSCS-Z.ANS | −2.217747268 | −3.173819137 | −1.261675399 | 0 |
| Z.FSCwCS-Z.ANS | −0.609996896 | −1.566068765 | 0.346074973 | 0.453265265 |
| Z.FCS-Z.CS | 2.21093374 | 1.254861871 | 3.167005609 | 0 |
| Z.FCwCS-Z.CS | 4.111037189 | 3.15496532 | 5.067109058 | 0 |
| Z.FSCS-Z.CS | 3.10386841 | 2.147796541 | 4.059940279 | 0 |
| Z.FSCwCS-Z.CS | 4.711618783 | 3.755546913 | 5.667690652 | 0 |
| Z.FCwCS-Z.FCS | 1.900103449 | 0.94403158 | 2.856175318 | 2.37 × 10−7 |
| Z.FSCS-Z.FCS | 0.89293467 | −0.063137199 | 1.849006539 | 0.083054818 |
| Z.FSCwCS-Z.FCS | 2.500685043 | 1.544613173 | 3.456756912 | 0 |
| Z.FSCS-Z.FCwCS | −1.007168779 | −1.963240648 | −0.05109691 | 0.032108868 |
| Z.FSCwCS-Z.FCwCS | 0.600581594 | −0.355490275 | 1.556653463 | 0.471492715 |
| Z.FSCwCS-Z.FSCS | 1.607750372 | 0.651678503 | 2.563822241 | 2.52 × 10−5 |
| Terms | Plot. diff | Plot. lwr | Plot. upr | Plot.p.adj |
|---|---|---|---|---|
| CTPL_1b-CTPL_1a | −1.24421 | −2.58179 | 0.093376 | 0.090111 |
| CTPL_1c-CTPL_1a | −1.50771 | −2.98012 | −0.03529 | 0.040289 |
| CTPL_1d-CTPL_1a | −3.27041 | −4.72927 | −1.81156 | 0 |
| CTPL_2a-CTPL_1a | 30.49071 | 29.36467 | 31.61674 | 0 |
| CTPL_2b-CTPL_1a | 27.91473 | 26.71499 | 29.11448 | 0 |
| CTPL_2c-CTPL_1a | 28.32723 | 27.14632 | 29.50814 | 0 |
| CTPL_2d-CTPL_1a | 26.54387 | 25.35698 | 27.73076 | 0 |
| CTPL_1c-CTPL_1b | −0.2635 | −1.76155 | 1.234545 | 0.999483 |
| CTPL_1d-CTPL_1b | −2.02621 | −3.51093 | −0.54148 | 0.000935 |
| CTPL_2a-CTPL_1b | 31.73491 | 30.57557 | 32.89426 | 0 |
| CTPL_2b-CTPL_1b | 29.15894 | 27.92787 | 30.39001 | 0 |
| CTPL_2c-CTPL_1b | 29.57144 | 28.35872 | 30.78416 | 0 |
| CTPL_2d-CTPL_1b | 27.78808 | 26.56953 | 29.00662 | 0 |
| CTPL_1d-CTPL_1c | −1.7627 | −3.36996 | −0.15545 | 0.020074 |
| CTPL_2a-CTPL_1c | 31.99841 | 30.6858 | 33.31103 | 0 |
| CTPL_2b-CTPL_1c | 29.42244 | 28.04607 | 30.79882 | 0 |
| CTPL_2c-CTPL_1c | 29.83494 | 28.47495 | 31.19493 | 0 |
| CTPL_2d-CTPL_1c | 28.05158 | 26.68639 | 29.41676 | 0 |
| CTPL_2a-CTPL_1d | 33.76112 | 32.46373 | 35.05851 | 0 |
| CTPL_2b-CTPL_1d | 31.18515 | 29.82329 | 32.54701 | 0 |
| CTPL_2c-CTPL_1d | 31.59764 | 30.25235 | 32.94294 | 0 |
| CTPL_2d-CTPL_1d | 29.81428 | 28.46373 | 31.16483 | 0 |
| CTPL_2b-CTPL_2a | −2.57597 | −3.57314 | −1.5788 | 0 |
| CTPL_2c-CTPL_2a | −2.16347 | −3.1379 | −1.18905 | 0 |
| CTPL_2d-CTPL_2a | −3.94684 | −4.9285 | −2.96517 | 0 |
| CTPL_2c-CTPL_2b | 0.412498 | −0.64625 | 1.471247 | 0.937254 |
| CTPL_2d-CTPL_2b | −1.37087 | −2.43628 | −0.30545 | 0.002467 |
| CTPL_2d-CTPL_2c | −1.78336 | −2.82752 | −0.7392 | 6.54 × 10−6 |
References
- Singh, A.; Kushwaha, S.K.P.; Nandy, S.; Padalia, H. An approach for tree volume estimation using RANSAC and RHT algorithms from TLS dataset. Appl. Geomat. 2022, 14, 785–794. [Google Scholar] [CrossRef]
- Yu, H.; Yang, W.; Xia, G.S.; Liu, G. A color-texture-structure descriptor for high-resolution satellite image classification. Remote Sens. 2016, 8, 259. [Google Scholar] [CrossRef] [Green Version]
- Forbes, B.; Reilly, S.; Clark, M.; Ferrell, R.; Kelly, A.; Krause, P.; Matley, C.; O’Neil, M.; Villasenor, M.; Disney, M.; et al. Comparing Remote Sensing and Field-Based Approaches to Estimate Ladder Fuels and Predict Wildfire Burn Severity. Front. For. Glob. Chang. 2022, 5, 818713. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Y.; Liu, Z. Extraction of Forestry Parameters Based on Multi-Platform LiDAR. IEEE Access 2022, 10, 21077–21094. [Google Scholar] [CrossRef]
- Cabo, C.; Ordóñez, C.; López-Sánchez, C.A.; Armesto, J. Automatic dendrometry: Tree detection, tree height and diameter estimation using terrestrial laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 164–174. [Google Scholar] [CrossRef]
- Kankare, V.; Puttonen, E.; Holopainen, M.; Hyyppä, J. The effect of TLS point cloud sampling on tree detection and diameter measurement accuracy. Remote Sens. Lett. 2016, 7, 495–502. [Google Scholar] [CrossRef]
- Åkerblom, M.; Kaitaniemi, P. Terrestrial laser scanning: A new standard of forest measuring and modelling? Ann. Bot. 2021, 128, 653–662. [Google Scholar] [CrossRef]
- García, M.; Danson, F.M.; Riaño, D.; Chuvieco, E.; Ramirez, F.A.; Bandugula, V. Terrestrial laser scanning to estimate plot-level forest canopy fuel properties. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 636–645. [Google Scholar] [CrossRef]
- Disney, M. Terrestrial LiDAR: A three-dimensional revolution in how we look at trees. New Phytol. 2019, 222, 1736–1741. [Google Scholar] [CrossRef] [Green Version]
- Walter, J.A.; Stovall, A.E.L.; Atkins, J.W. Vegetation structural complexity and biodiversity in the Great Smoky Mountains. Ecosphere 2021, 12, e03390. [Google Scholar] [CrossRef]
- Wilkes, P.; Lau, A.; Disney, M.; Calders, K.; Burt, A.; Gonzalez de Tanago, J.; Bartholomeus, H.; Brede, B.; Herold, M. Data acquisition considerations for Terrestrial Laser Scanning of forest plots. Remote Sens. Environ. 2017, 196, 140–153. [Google Scholar] [CrossRef]
- Wezyk, P.; Koziol, K.; Glista, M.; Pierzchalski, M. Terrestrial laser scanning versus traditional forest inventory first results from the polish forests. In Proceedings of the ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, 12–14 September 2007; Volume 36, pp. 424–429. [Google Scholar]
- Palace, M.; Sullivan, F.B.; Ducey, M.; Herrick, C. Estimating Tropical Forest Structure Using a Terrestrial Lidar. PLoS ONE 2016, 11, e0154115. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Decuyper, M.; Mulatu, K.A.; Brede, B.; Calders, K.; Armston, J.; Rozendaal, D.M.A.; Mora, B.; Clevers, J.G.P.W.; Kooistra, L.; Herold, M.; et al. Assessing the structural differences between tropical forest types using Terrestrial Laser Scanning. For. Ecol. Manag. 2018, 429, 327–335. [Google Scholar] [CrossRef]
- Azuan, N.H.; Khairunniza-Bejo, S.; Abdullah, A.F.; Kassim, M.S.M.; Ahmad, D. Analysis of Changes in Oil Palm Canopy Architecture from Basal Stem Rot Using Terrestrial Laser Scanner. Plant Dis. 2019, 103, 3218–3225. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muumbe, T.P.; Tagwireyi, P.; Mafuratidze, P.; Hussin, Y.; van Leeuwen, L. Estimating above-ground biomass of individual trees with terrestrial laser scanner and 3D quantitative structure modelling. South. For. 2021, 83, 56–68. [Google Scholar] [CrossRef]
- Seidel, D.; Fleck, S.; Leuschner, C.; Hammett, T. Review of ground-based methods to measure the distribution of biomass in forest canopies. Ann. For. Sci. 2011, 68, 225–244. [Google Scholar] [CrossRef] [Green Version]
- Pueschel, P. The influence of scanner parameters on the extraction of tree metrics from FARO Photon 120 terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2013, 78, 58–68. [Google Scholar] [CrossRef]
- Abegg, M.; Kükenbrink, D.; Zell, J.; Schaepman, M.E.; Morsdorf, F. Terrestrial laser scanning for forest inventories-tree diameter distribution and scanner location impact on occlusion. Forests 2017, 8, 184. [Google Scholar] [CrossRef] [Green Version]
- Gollob, C.; Ritter, T.; Wassermann, C.; Nothdurft, A. Influence of scanner position and plot size on the accuracy of tree detection and diameter estimation using terrestrial laser scanning on forest inventory plots. Remote Sens. 2019, 11, 1602. [Google Scholar] [CrossRef] [Green Version]
- Kushwaha, S.K.P.; Singh, A.; Jain, K.; Mokros, M. Optimum Number and Positions of Terrestrial Laser Scanner To Derive Dtm At Forest Plot Level. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2022, 43, 457–462. [Google Scholar] [CrossRef]
- CloudCompare. [GPL Software] Vrsion 2.12.4. 2022. Available online: https://www.danielgm.net/cc/release/ (accessed on 24 February 2023).
- Koren, M. Dendrocloud Version 1.53. Available online: https://gis.tuzvo.sk/dendrocloud/download.aspx (accessed on 24 February 2023).
- Trochta, J.; Král, K.; Janík, D.; Adam, D. Arrangement of terrestrial laser scanner positions for area-wide stem mapping of natural forests. Can. J. For. Res. 2013, 43, 355–363. [Google Scholar] [CrossRef]
- Wan, P.; Wang, T.; Zhang, W.; Liang, X.; Skidmore, A.K.; Yan, G. Quantification of occlusions influencing the tree stem curve retrieving from single-scan terrestrial laser scanning data. For. Ecosyst. 2019, 6, 43. [Google Scholar] [CrossRef] [Green Version]















| TLS_Plot1 | TLS_Plot2 | ||
|---|---|---|---|
| Subplots | Number of Trees | Subplots | Number of Trees |
| TLS_1a | 49 | TLS_2a | 102 |
| TLS_1b | 45 | TLS_2b | 72 |
| TLS_1c | 32 | TLS_2c | 78 |
| TLS_1d | 33 | TLS_2d | 76 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kushwaha, S.K.P.; Singh, A.; Jain, K.; Vybostok, J.; Mokros, M. Qualitative Analysis of Tree Canopy Top Points Extraction from Different Terrestrial Laser Scanner Combinations in Forest Plots. ISPRS Int. J. Geo-Inf. 2023, 12, 250. https://doi.org/10.3390/ijgi12060250
Kushwaha SKP, Singh A, Jain K, Vybostok J, Mokros M. Qualitative Analysis of Tree Canopy Top Points Extraction from Different Terrestrial Laser Scanner Combinations in Forest Plots. ISPRS International Journal of Geo-Information. 2023; 12(6):250. https://doi.org/10.3390/ijgi12060250
Chicago/Turabian StyleKushwaha, Sunni Kanta Prasad, Arunima Singh, Kamal Jain, Jozef Vybostok, and Martin Mokros. 2023. "Qualitative Analysis of Tree Canopy Top Points Extraction from Different Terrestrial Laser Scanner Combinations in Forest Plots" ISPRS International Journal of Geo-Information 12, no. 6: 250. https://doi.org/10.3390/ijgi12060250