
A Contour Line Group Simplification Method Based on Classified Terrain Features
Abstract
:1. Introduction
2. Background to the Study
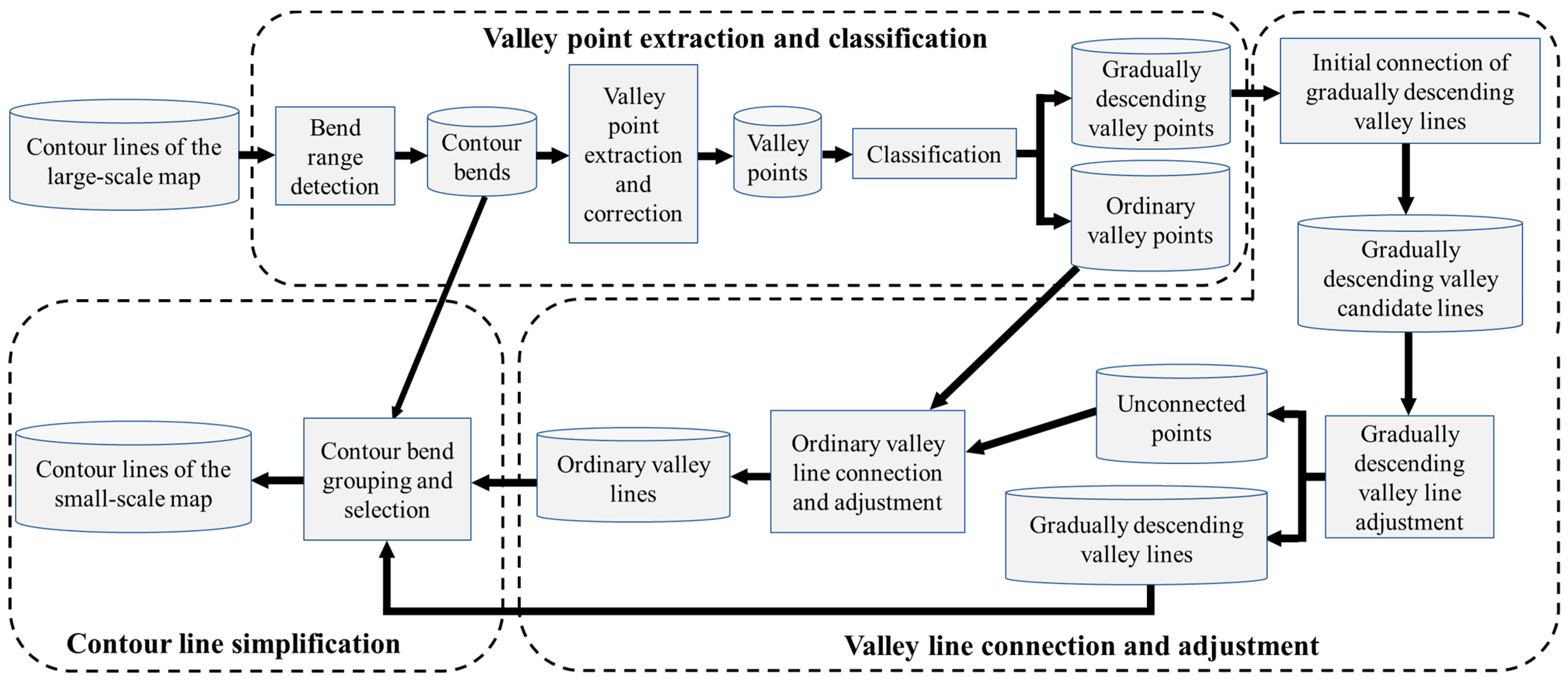
3. Methodology
3.1. Valley Point Extraction and Classification
- We adjusted the order of contour points so that the left side of the forward direction of each contour point was the direction of elevation rise.
- The valley-side bends of each contour line were detected based on the vector cross product method [8]. For open contour lines, we calculated the cross product of the vectors obtained by connecting two adjacent points starting from the first point, with successive cross products below zero recorded as valley bends. For closed contour lines, if the vector cross products formed by the first point and the points on either side were not greater than zero, the point sequence was reversed to find the original point of the bend on which the first point was located. It was then necessary to search for the end point of the bend, starting with the first point, to obtain the point range of the first valley bend. The remainder of the process was the same as that used for open contour lines.
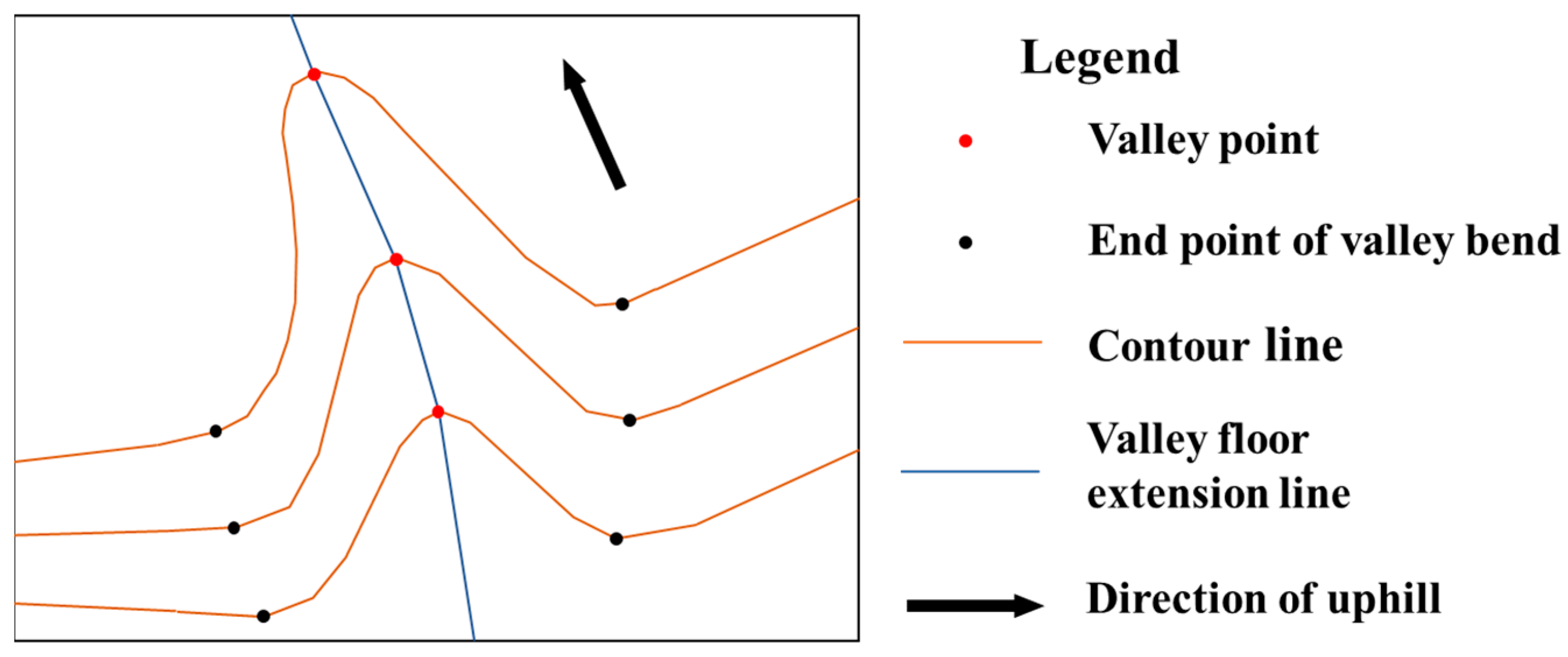
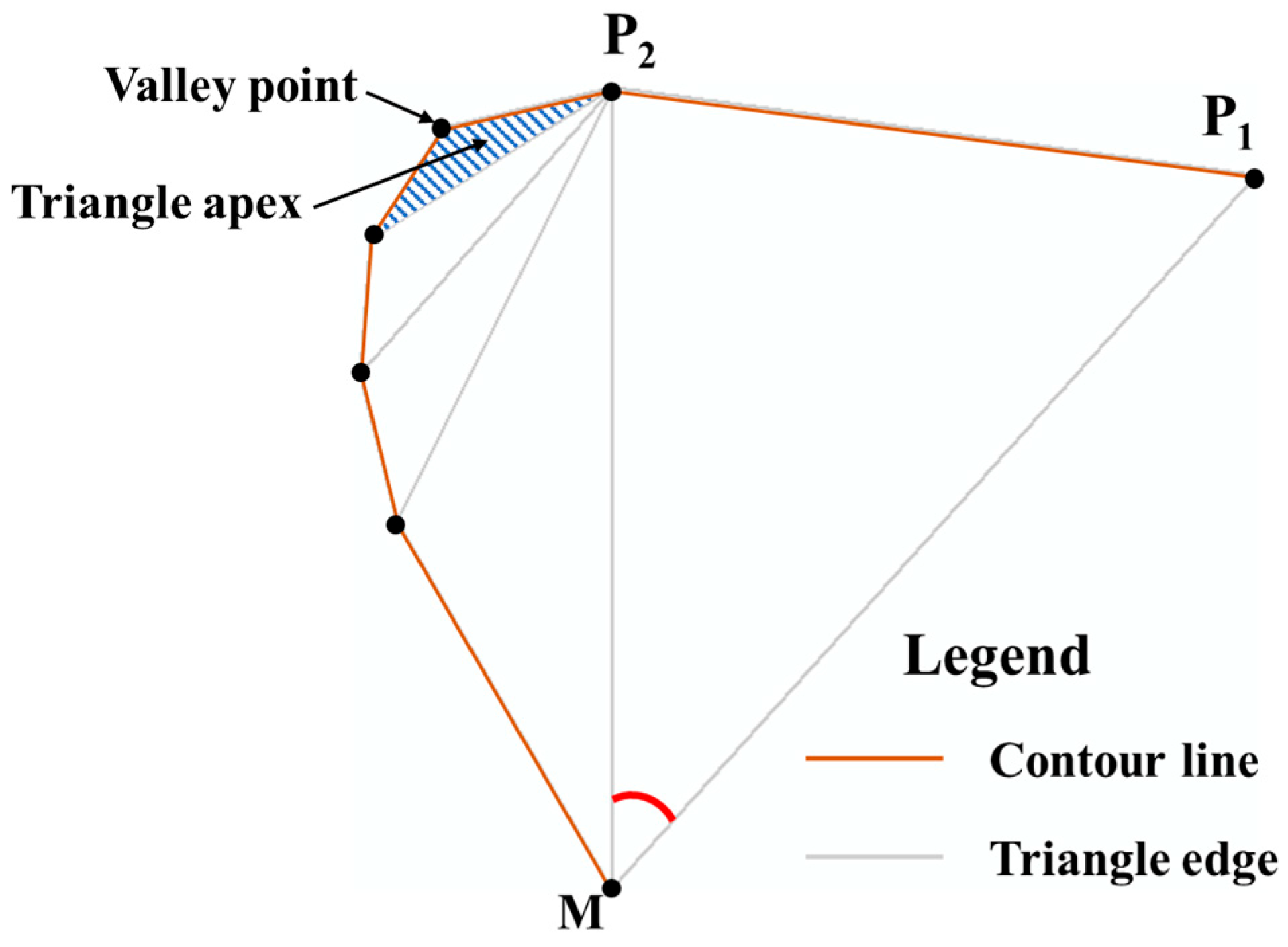
- The valley points were extracted based on the constrained DTN. The constrained DTN [19] was established in the valley bend, as shown in Figure 5. The line was connected by the two adjacent points and at the start of the bend as the starting baseline, and the third point found inside the bend, making (colored red) the maximum angle. The first triangle, , subsequently generated new triangles from both sides, with and as the baselines, until all the points had been processed. The vertex of the triangle apex (shaded with blue lines) is the valley point corresponding to the bend, as shown in Figure 5.
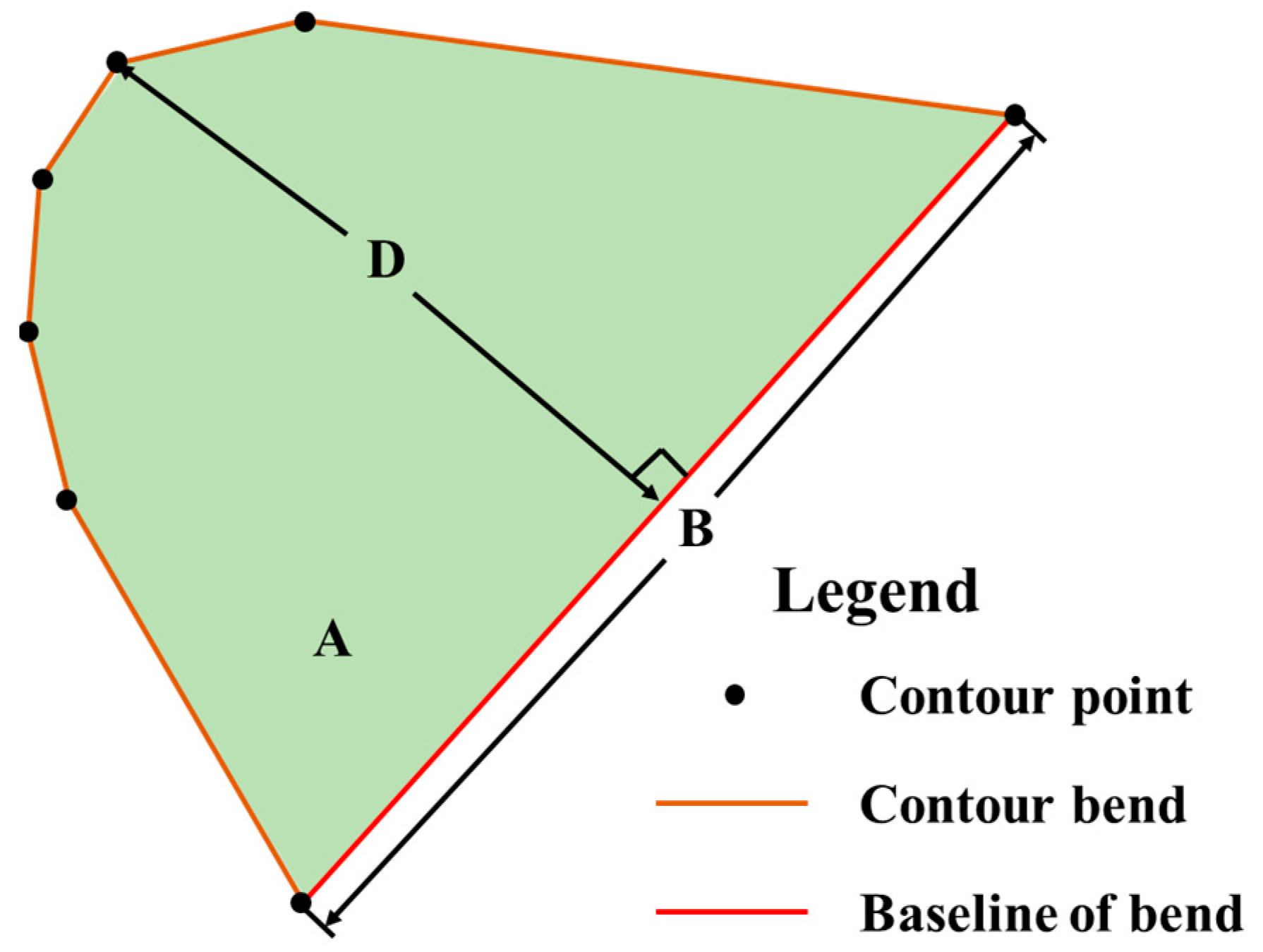
- Erroneous valley point correction. To find and correct erroneous valley points, we first calculated the curve coefficient of each point on the bend and defined the curve coefficient of point on the bend according to Equation (1):where and are two points on a contour line, with a path distance of on both sides of . If the distance between the contour lines on this side was less than , then the endpoint on this side of the contour line would substitute or . Instead of using the traditional method, a certain length was used to intercept a curve segment of the contour line to calculate the curve coefficient [26,30].
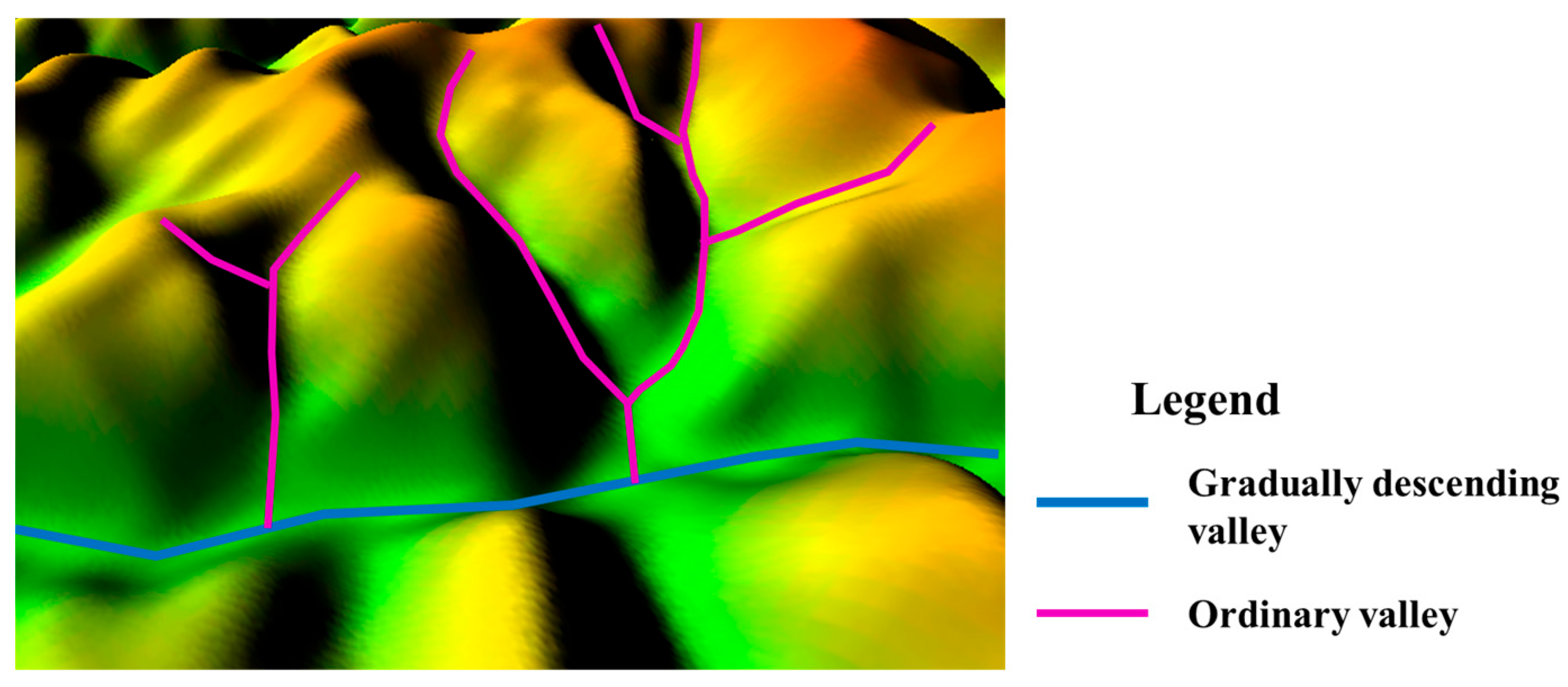
3.2. Valley Line Classification and Connection
- Initial extraction of gradually descending valley edges. A Delaunay triangulation network (DTN) was established for all candidate points of gradually descending valleys, retaining edges, of which the height difference between two endpoints was and the length was less than , as the initial set of gradually descending valley edges.
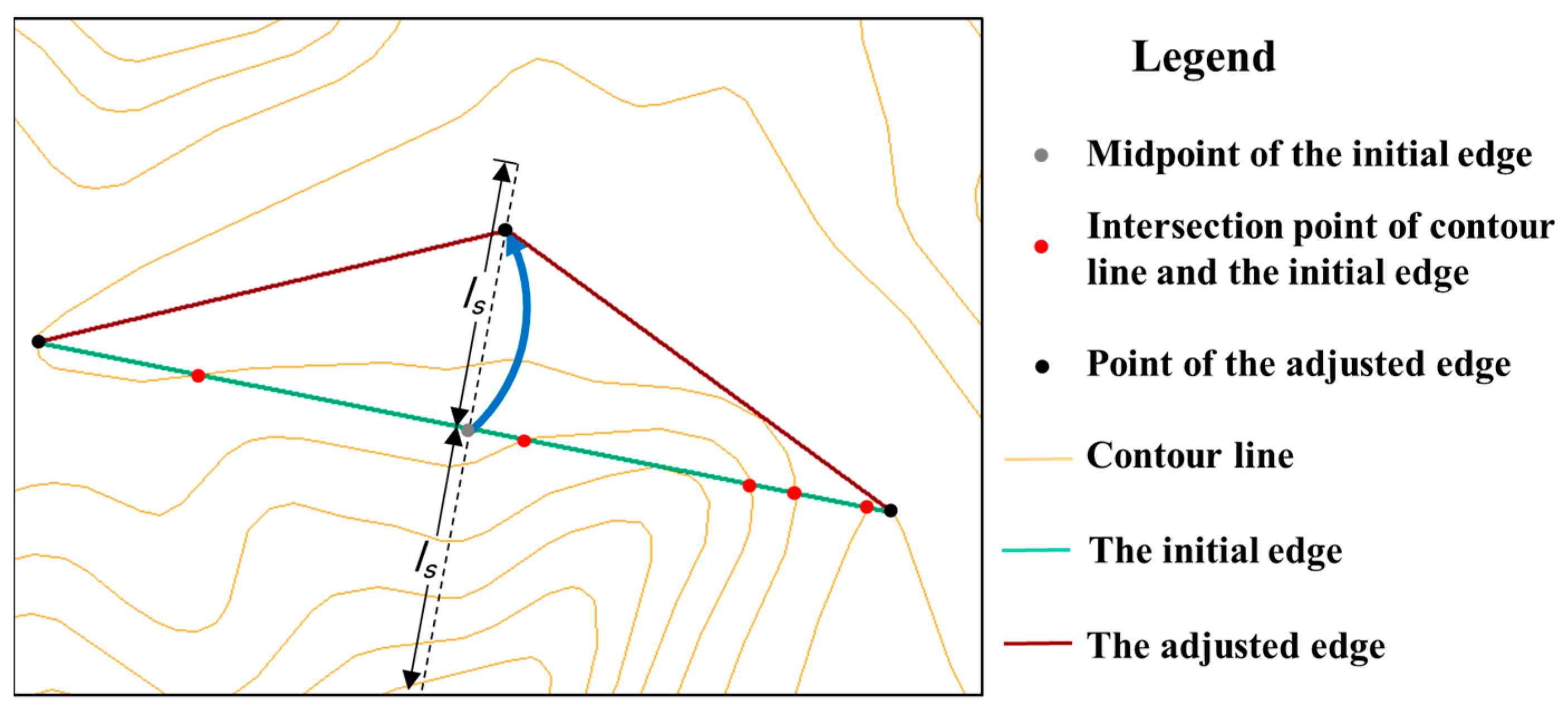
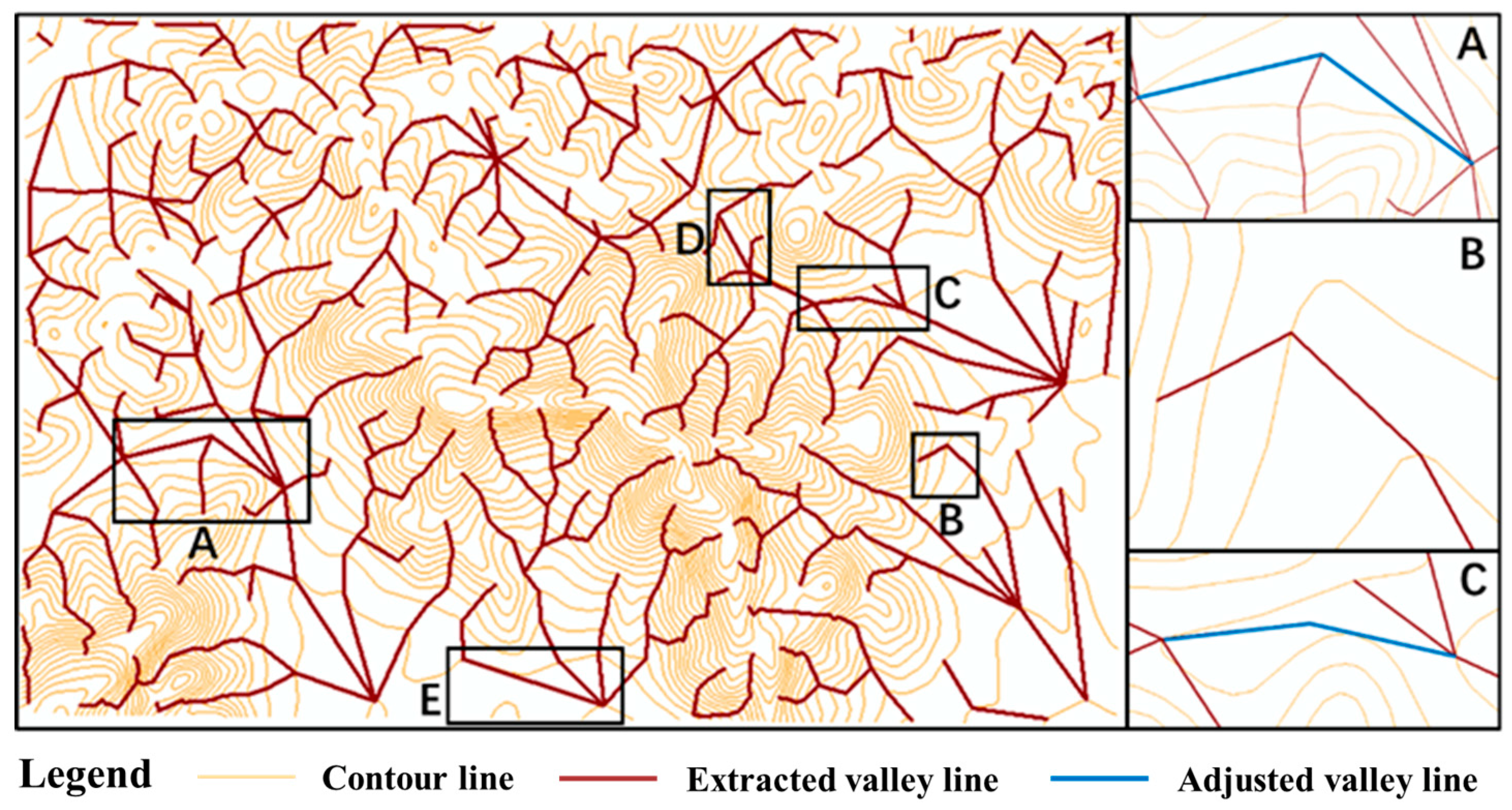
- Adjustment of gradually descending valley edges. The set of gradually descending valley edges was subsequently revised and screened to find the edge that intersected the contour line at the non-endpoint, a vertical bisector was drawn to that edge, and the midpoint of the edge was moved within the range at both sides until the edge did not intersect the contour line. If the condition could not be satisfied, regardless of the movement, the edge was deleted from the set of the gradually descending valley edges. In Figure 6, the green line is the edge of the gradually descending valley before adjustment, and the red points are the intersection points with the contour lines. After moving the midpoint along the vertical bisector in the direction of the blue arrow, the adjusted edges are represented by the purple lines.
- Supplementary connection of gradually descending valley edges. Supplementary connections were made to discontinuous points of the revised and screened edges of gradually descending valleys. The conditions for supplementary connections were as follows. The supplementary connection should only cross one contour line, with its elevation being between the contour lines at both ends of the connection, and the supplementary connection should be relatively straight. In the process of implementing, point was taken from the ordinary valley point set in turn, and the endpoints and of the two gradually descending valley edges were connected, namely and , with , where and represent the endpoints with higher and lower elevations of the valley edge, respectively. The elevation of should be higher than that of and lower than that of . If and did not intersect contour lines except at endpoints, and were greater than the included angle threshold , then and were added to the set of the gradually descending valley edges, thereby completing the extraction of the gradually descending valley edges. Jin and Gao [23] set the direction change angle threshold at 60° for connecting terrain feature lines, with the included angle corresponding to the supplementary angle of the direction change angle, implying the included angle threshold was set to its supplementary angle of 120°.
- Preparation for the connection of ordinary valley lines. All the unconnected valley points of gradually descending valley edges were included in the set of ordinary valley points, and a Delaunay triangulation network was established for all the points included. The length of each edge was calculated, and the vector cross product was used to identify all the ridge bends and enveloping areas.
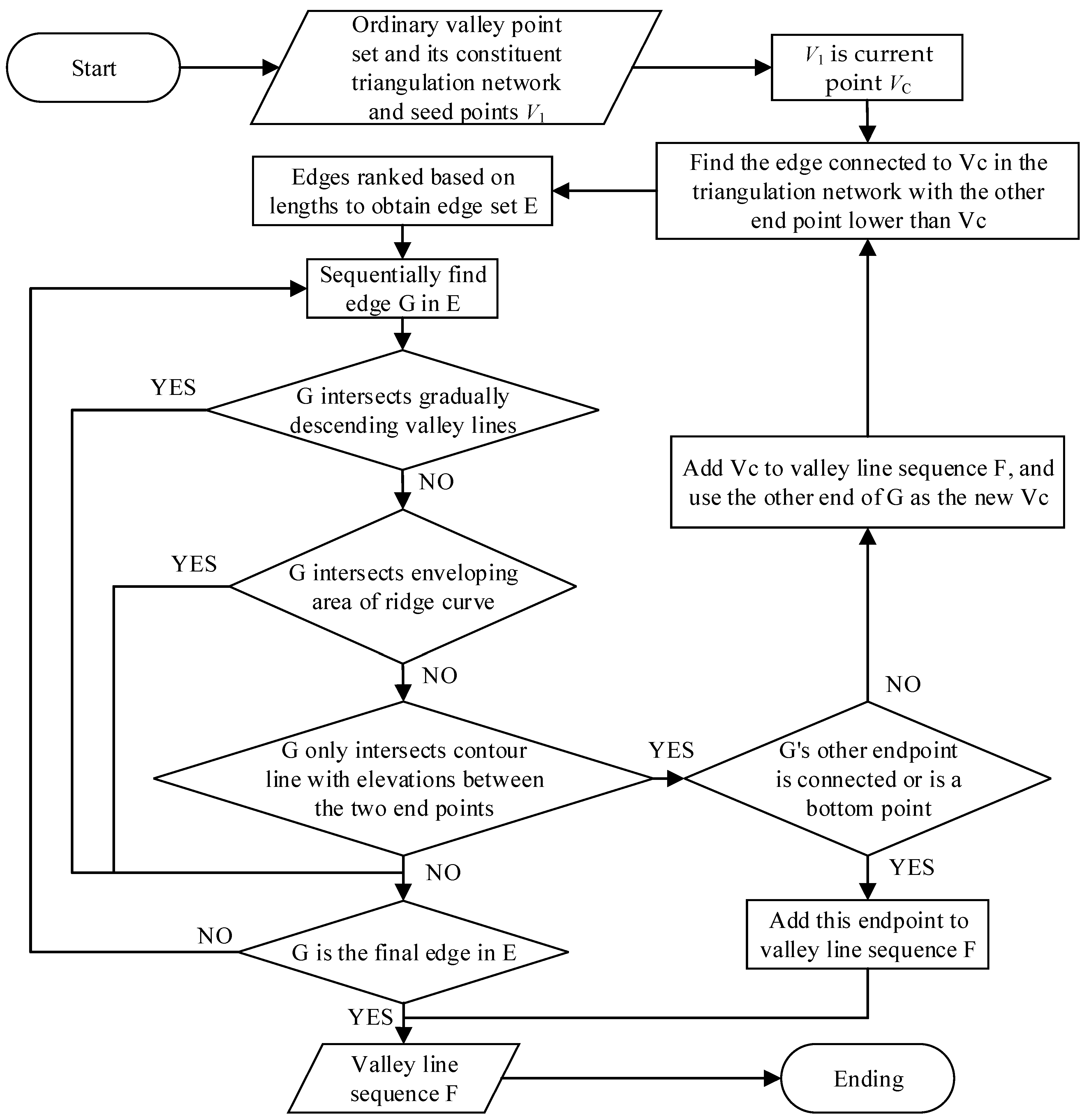
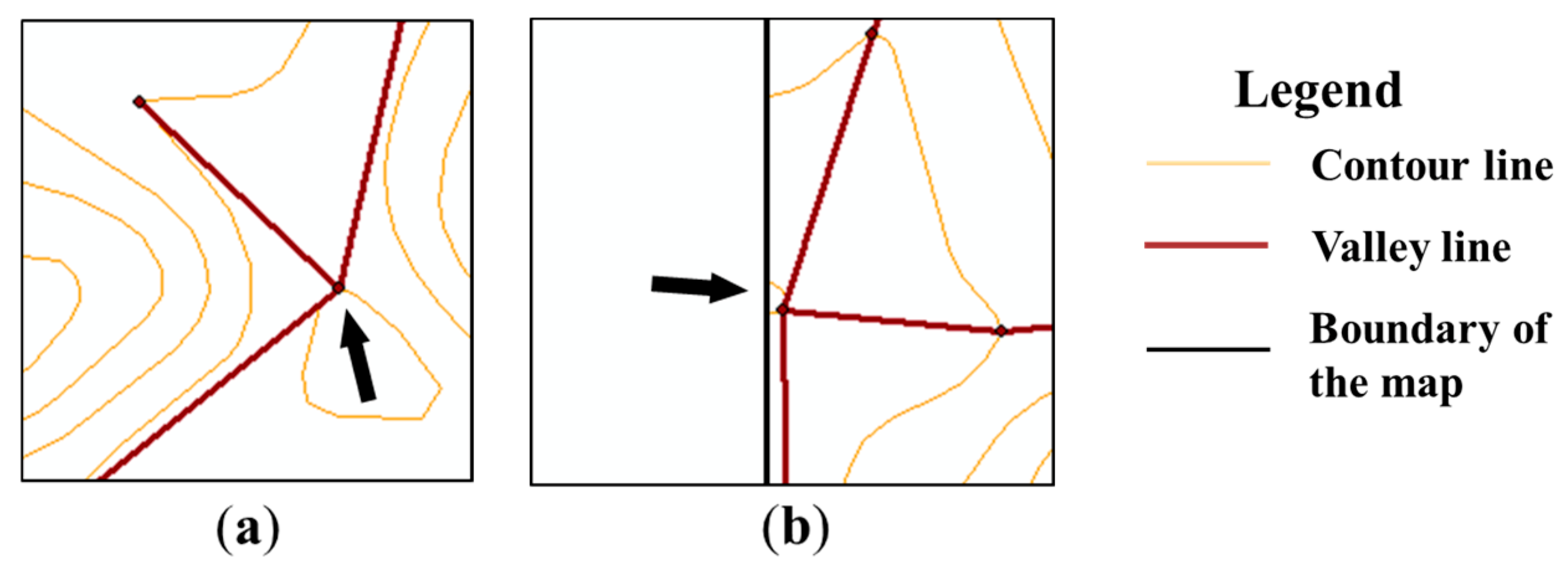
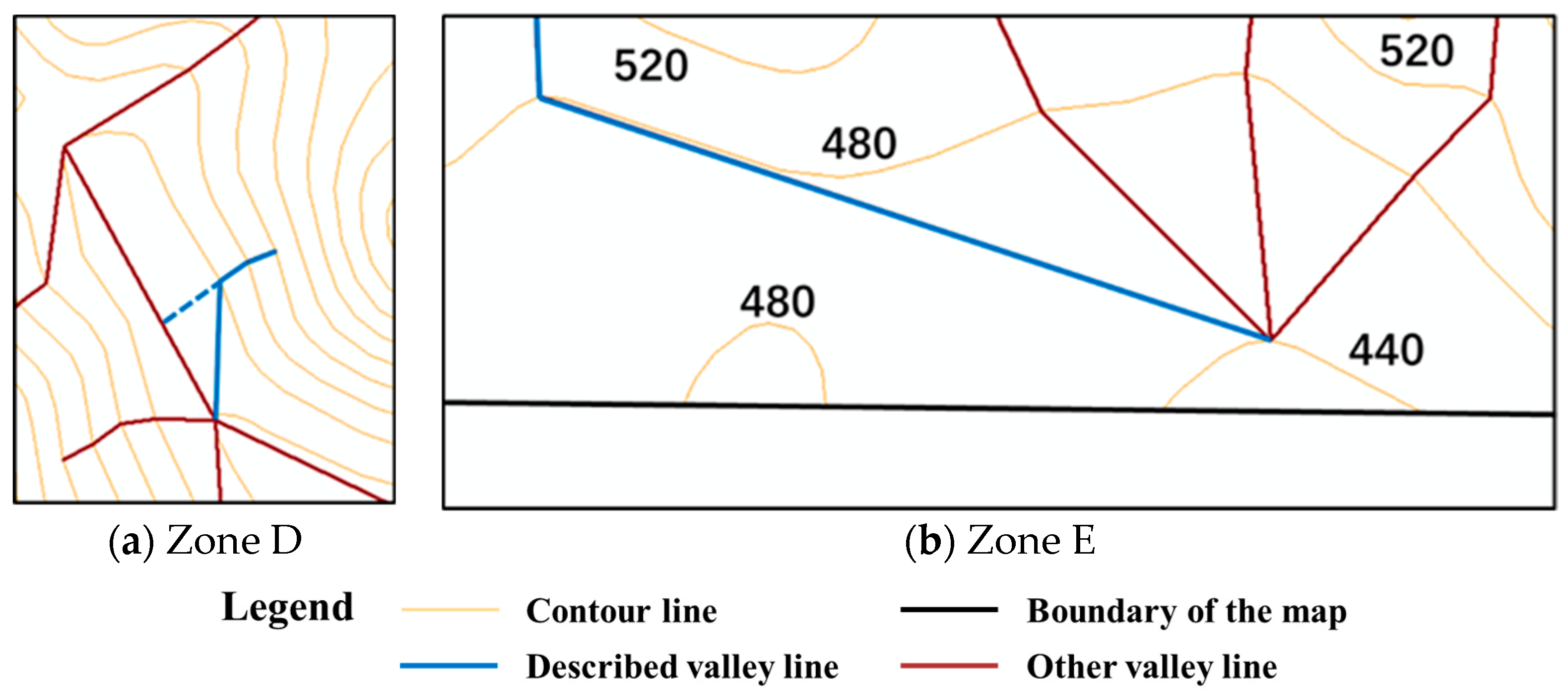
- Connection of ordinary valley lines. Ordinary valley points were sorted in descending order of elevation. Unconnected valley points were selected as seed points for valley line tracking. The workflow for processing each seed point is shown in Figure 7. The subsequent valley points to be connected were found individually by using specific filter conditions until the conditions for stopping the connections were met. Valley lines were tracked from the highest elevation first because water descends under the force of gravity after rainfall, with valleys formed by the mechanical movement of converging water along with decreases in elevation. Starting from the lowest elevation would lead to constantly encountering bifurcations, which would impede the tracking process. In geomorphology, it is accepted that a valley does not span other valleys or ridges. Therefore, edges that intersect with previously extracted gradually descending valleys and enveloping areas of ridge bends must be discarded. Given that surface water flows descend, the elevation of valley lines changes predictably. Therefore, the elevation of any point on each side of a valley line must be between the elevations of the endpoints on both sides. The conditions for stopping connections included traversing all edges connected to the current valley point and connecting to the bottom point or points already connected by other valley lines. The bottom point is the valley point with no other contour line inside the polygon formed by the closed contour line or the open contour line and the map margin, corresponding to the points indicated by the arrows in Figure 8a,b.
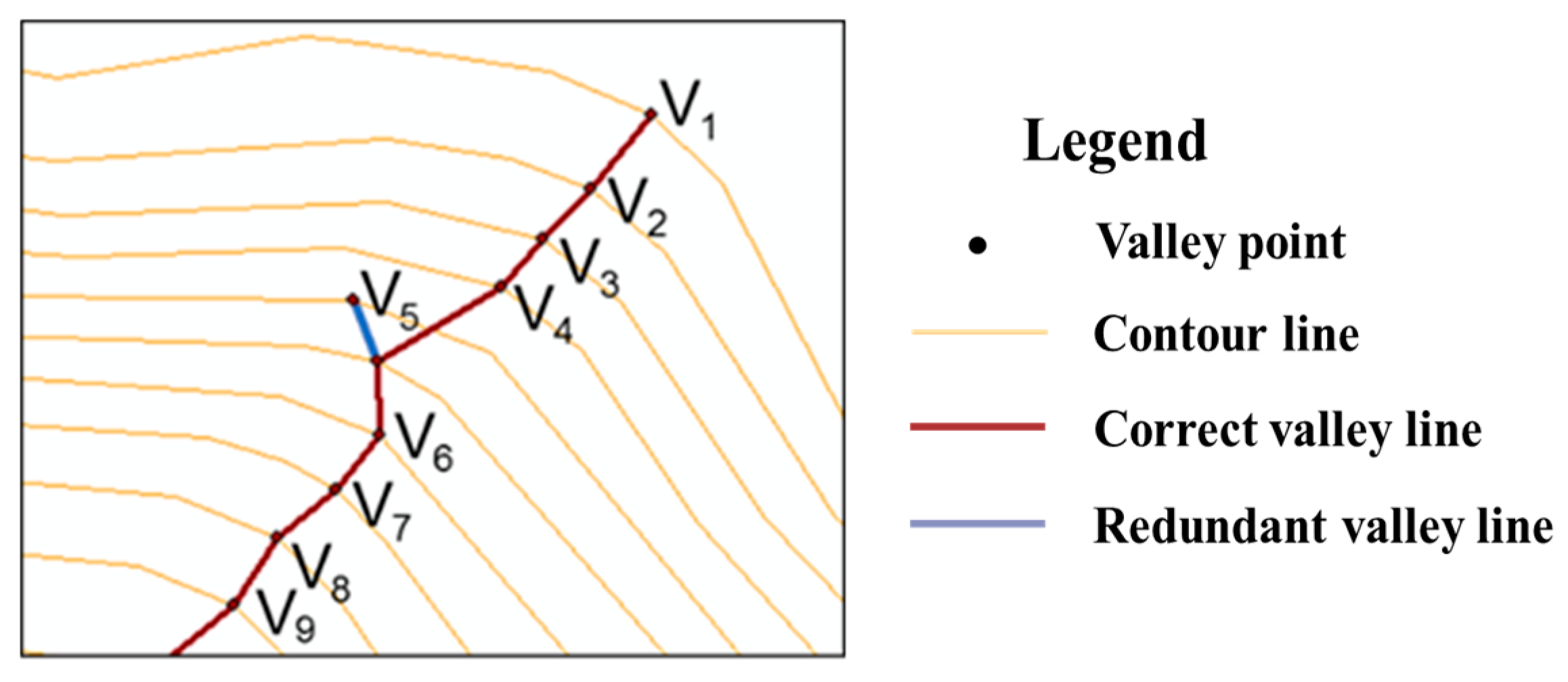
- Trimming redundant valley lines. Redundant valley lines occur when individual valley points have large deviation while edges generated by valley points in the Delaunay triangular network in Step (5) are being selected, leading to selection of a short line connecting a valley point on an adjacent contour line. When connecting this valley line, the current valley point would be crossed. This point was then used as a seed point to connect the adjacent lower valley point, generating a redundant valley line. Redundant valley lines appear as a small branch connected to a longer valley line. In Figure 9, is a valley point with a large deviation. The blue line is the redundant valley line corresponding to that point. Valley bends are used to represent the range of valley lines. If bends , , and intersected the valley line, its range would be . For any valley line , if , ; therefore, would be designated as a redundant valley line and discarded.
- Supplementary connection of ordinary valley lines. Supplementary connections were made to the valley lines to form a complete tree structure between the lines. If the valley point with the lowest elevation on an ordinary valley line was not connected to other valley lines and it was not a bottom point, connections were attempted with all the lower valley points through this point. If a connecting line did not intersect the contour line and valley line, it was added to the current valley line; otherwise, no action was taken.
- The obtained ordinary valley lines were smoothed to meet human cognition. For the three consecutive points , , and on the valley line, the inner point of the bend where is located was determined. If point was on the same bend as and , was subsequently replaced with . The point sequence of the valley line was updated simultaneously until the entire valley line was processed.
3.3. Contour Line Group Simplification
4. Experiments and Analysis
4.1. Experiment Data and Pre-Processing
4.2. Test Results and Comparative Analysis
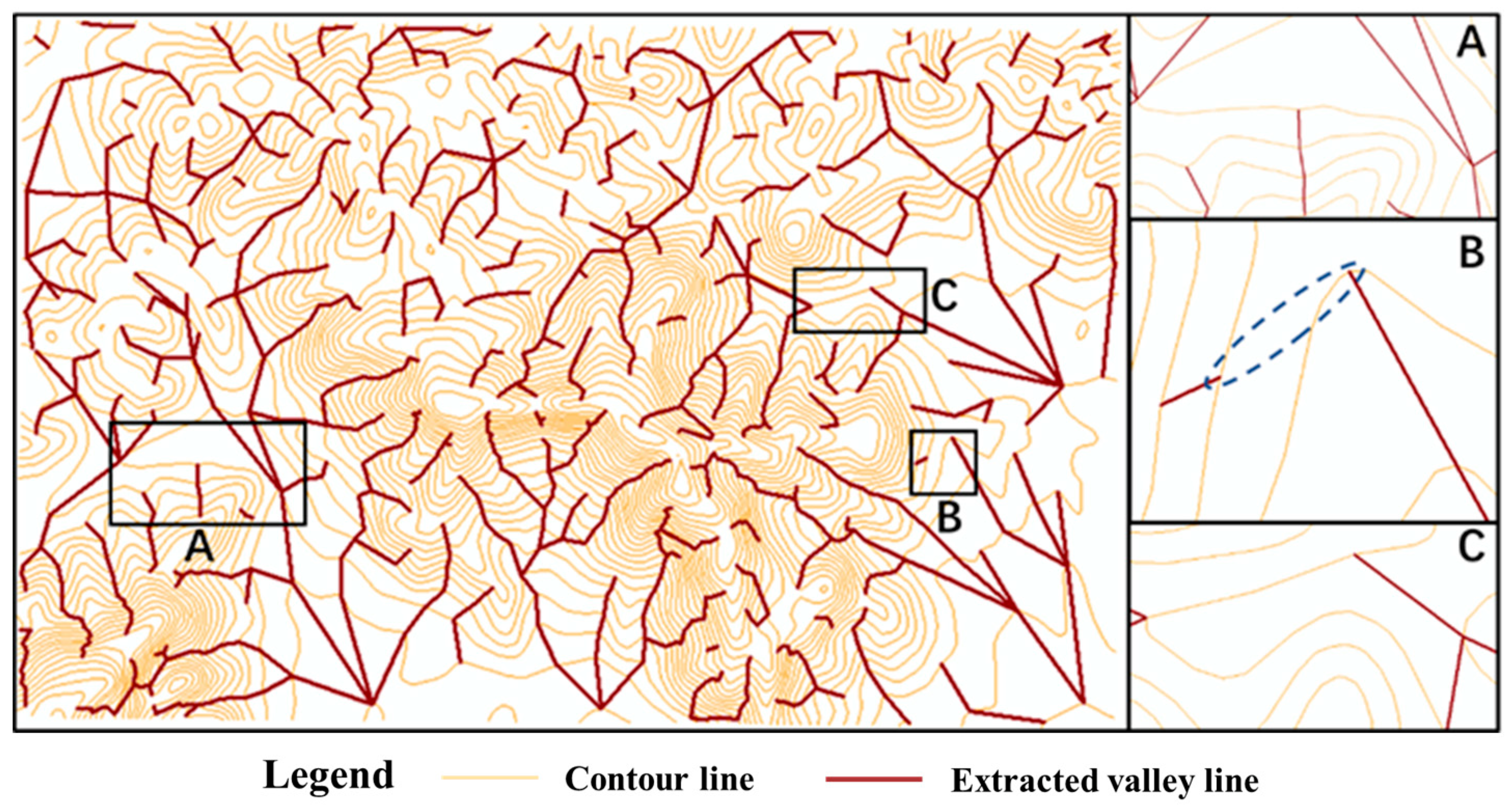
4.2.1. Valley Line Extraction Results and Analysis
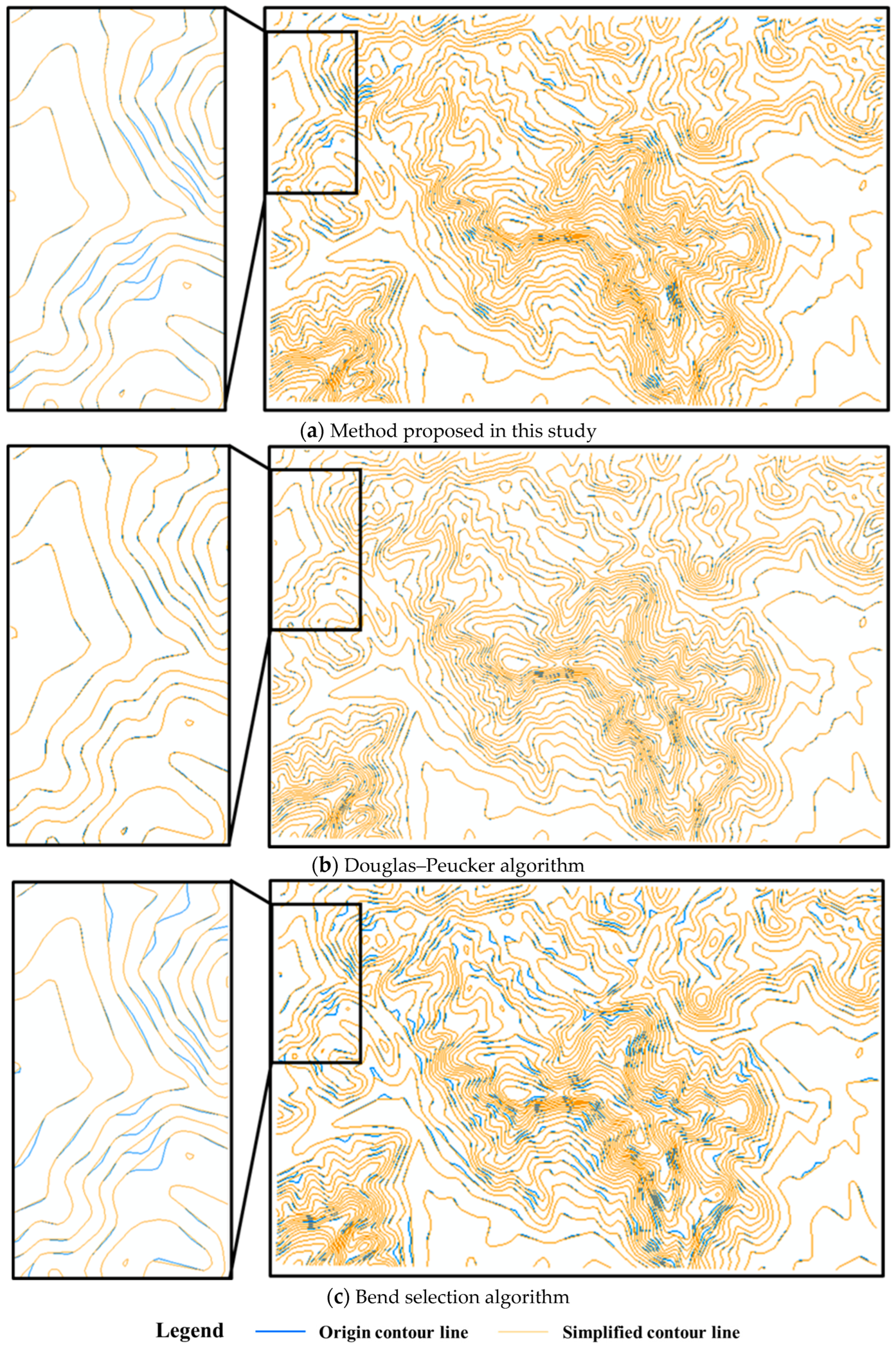
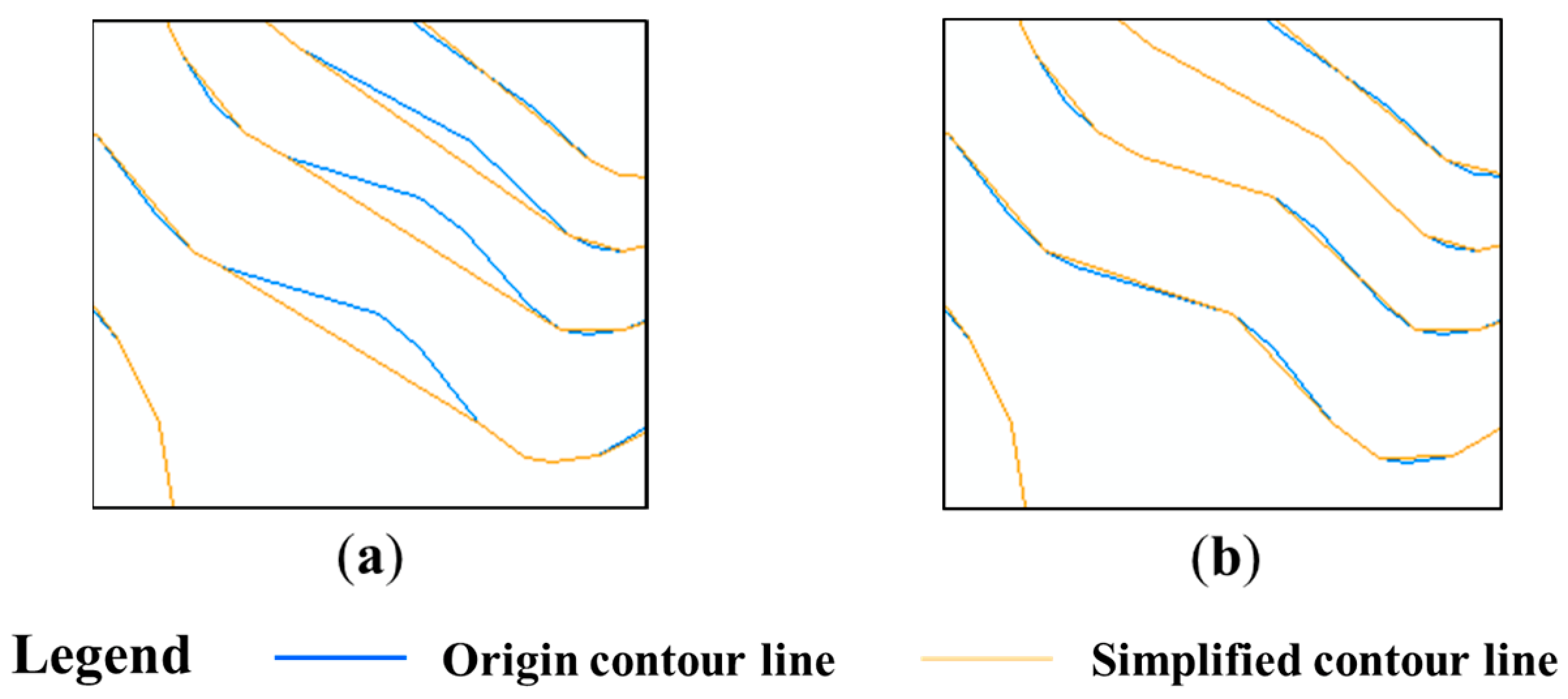
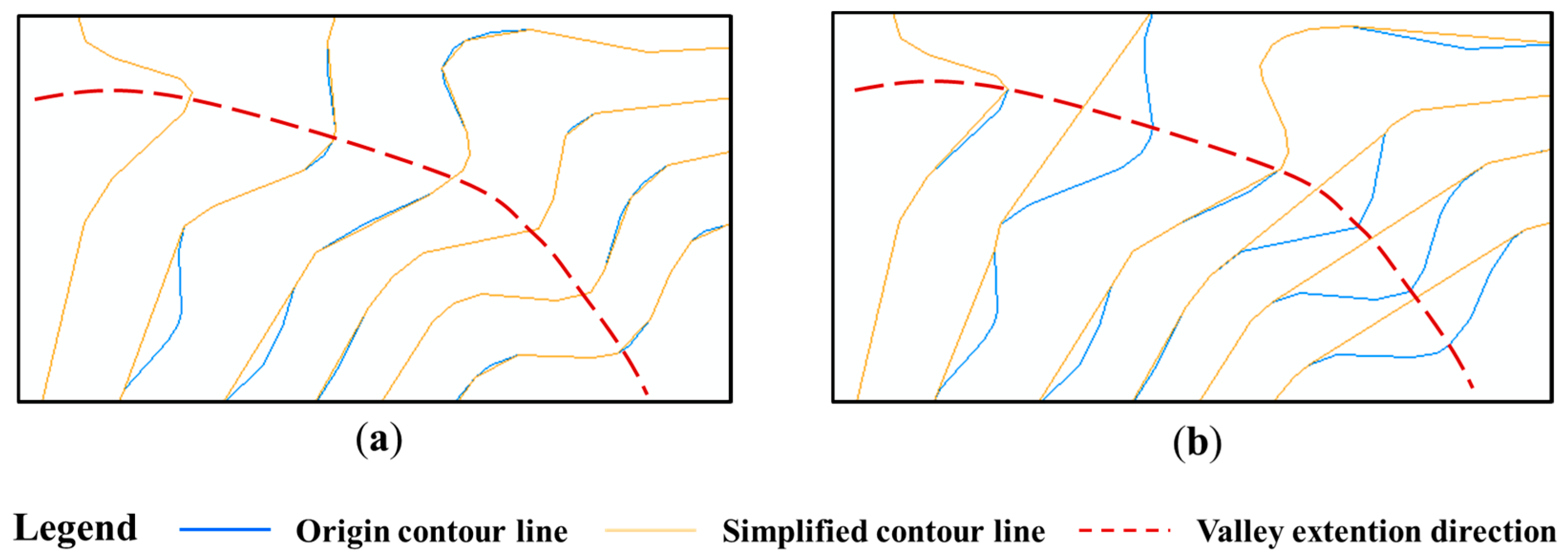
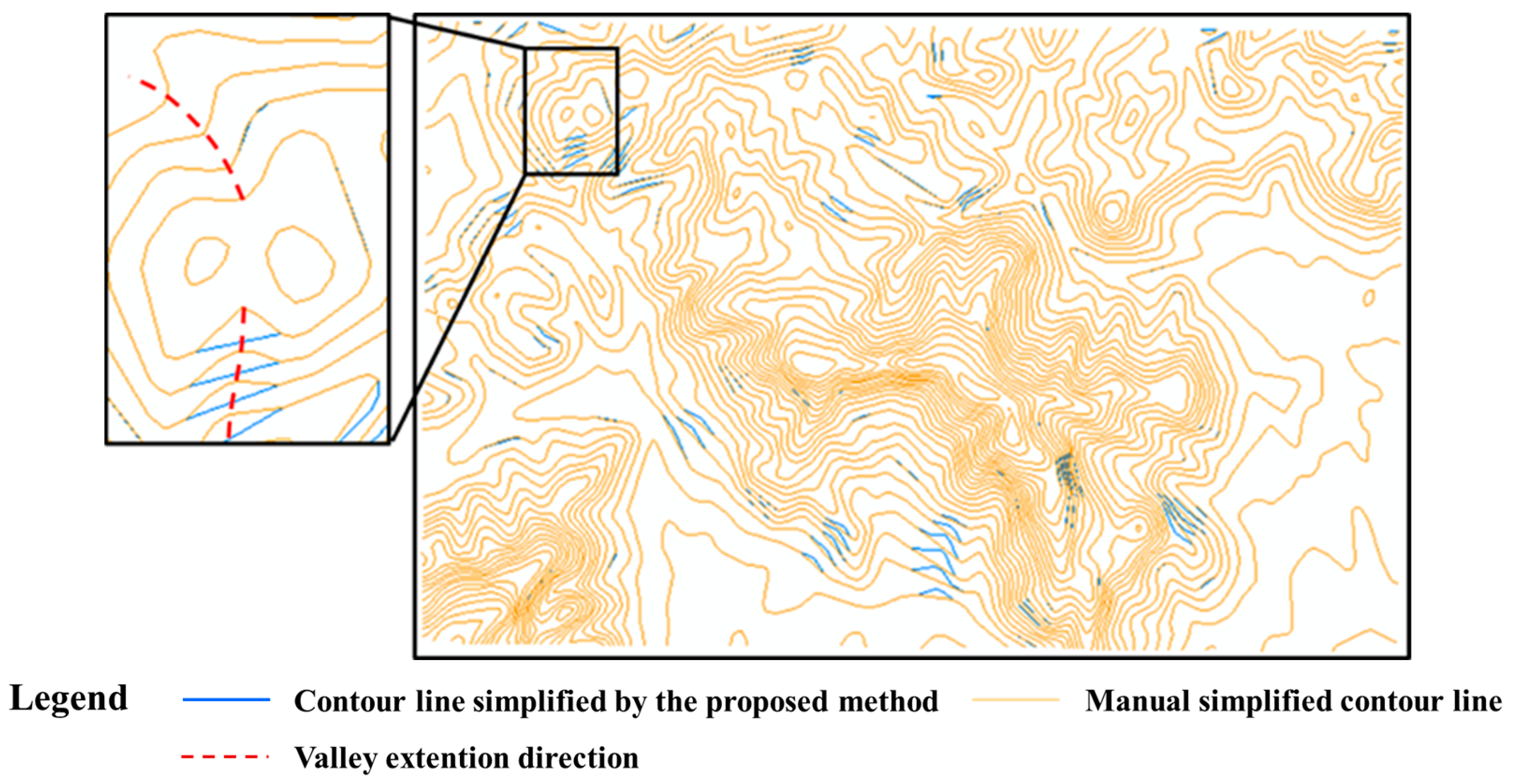
4.2.2. Results and Analysis of Contour Line Simplification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tang, G.; Na, J.; Cheng, W. Progress of digital terrain analysis on regional geomorphology in China. Acta Geod. Et Cartogr. Sin. 2017, 46, 1570–1591. [Google Scholar]
- Wu, F.; Gong, X.; Du, J. Overview of the research progress in automated map generalization. Acta Geod. Et Cartogr. Sin. 2017, 46, 1645–1664. [Google Scholar]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Can. Cartogr. 1973, 10, 112–122. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Openshaw, S. Algorithms for automated line generalization based on a natural principle of objective generalization. Int. J. Geogr. Inf. 1992, 6, 373–389. [Google Scholar] [CrossRef]
- Visvalingam, M.; Whelan, J.C. Implications of weighting metrics for line generalization with Visvalingam’s Algorithm. Cartogr. J. 2016, 53, 253–267. [Google Scholar] [CrossRef]
- Tutić, D.; Štanfel, M.; Jogun, T. Automation of cartographic generalisation of contour lines. In Unbounded Mapping of Mountains, Proceedings of the 10th ICA Mountain Cartography Workshop, Berchtesgaden, Germany, 11 July 2016; Technische Universität Dresden, Institute of Cartography: Dresden, Germany, 2016; pp. 65–77. [Google Scholar]
- Qian, H.; Zhang, M.; Wu, F. A new simplification approach based on the Oblique-Dividing-Curve Method for Contour Lines. ISPRS Int. J. Geo-Inf. 2016, 5, 153. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Q.; Wu, F.; Qian, H.Z. Cognizing and structuring valley curves of contour lines based on the idea of subdivision. J. Geomatics Sci. Technol. 2014, 31, 424–430. [Google Scholar]
- Mozas-Calvache, A.T.; Urena-Camara, M.A.; Percz-Garcia, J.L. Accuracy of contour lines using 3D bands. Int. J. Geogr. Inf. Sci. 2013, 27, 2362–2374. [Google Scholar] [CrossRef]
- Gokgoz, T. Generalization of contours using deviation angles and error bands. Cartogr. J. 2005, 42, 145–156. [Google Scholar] [CrossRef] [Green Version]
- He, G.; Zhang, X.; Sun, Y.; Luo, G.; Chen, L. Contour line simplification method based on the two-level Bellman–Ford algorithm. Trans. GIS 2020, 25, 396–423. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, L.; Guilbert, E.; Longa, Y. An improved spatial contour tree constructed method. Proc. Int. Cartogr. Assoc. 2018, 1, 128. [Google Scholar]
- Ai, T. The drainage network extraction from contour lines for contour line generalization. ISPRS J. Photogramm. Remote Sens. 2007, 62, 93–103. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, G. Progressive graphical simplification of contour lines based on topographical feature constraints. In Proceedings of the International Conference on Intelligence Science and Information Engineering, Wuhan, China, 20–21 August 2011; pp. 181–184. [Google Scholar]
- Lan, Y.; Cheng, Y.; Liu, X. Research and implementation of contours automatic generalization constrained by terrain line. In Big Data Analytics for Cyber-Physical System in Smart City. Advances in Intelligent Systems and Computing; Atiquzzaman, M., Yen, N., Xu, Z., Eds.; Springer: Singapore, 2020; pp. 707–713. [Google Scholar]
- Huang, L.; Fei, L. Experimental investigation on the three dimension generalization of contour lines using 3D D-P Algorithm. Geomat. Inf. Sci. Wuhan Univ. 2010, 35, 55–58. [Google Scholar]
- Dou, S.; Zhang, X. The improvement of the three dimensional Douglas–Peucker Algorithm. Adv. Mater. Res. 2014, 926–930, 3701–3704. [Google Scholar]
- Cheng, L.; Guo, Q.; Fei, L.; Wei, Z. An improved integrated generalization method for contours and rivers using importance sequence of all points from these two elements. Geocarto Int. 2021, 36, 1–16. [Google Scholar] [CrossRef]
- Zhang, Y.; Fan, H.; LI, Y. A method of terrain feature extraction based on contour. Acta Geod. et Cartogr. Sin. 2013, 42, 574–580. [Google Scholar]
- Aumann, G.; Ebner, H.; Tang, L. Automatic derivation of skeleton lines from digitized contours. ISPRS J. Photogramm. Remote Sens. 1991, 46, 259–268. [Google Scholar] [CrossRef]
- Ai, T.; Yang, M.; Zhang, X.; Tian, J. Detection and correction of inconsistencies between river networks and contour data by spatial constraint knowledge. Cartogr. Geogr. Inf. Sci. 2014, 42, 79–93. [Google Scholar] [CrossRef]
- Liu, H.; Jin, H.; Miao, B. An algorithm for extracting terrain structure lines based on contour data. In Proceedings of the SPIE-The International Society for Optical Engineering, Beijing, China, 18–20 October 2010; 7840, pp. 286–291. [Google Scholar]
- Jin, H.; Gao, J. Research on the algorithm of extracting ridge and valley lines from contour data. Geo. Spat. Inf. Sci. 2012, 8, 282–286. [Google Scholar]
- Li, C.; Guo, P.; Wu, P.; Liu, X. Extraction of terrain feature lines from elevation contours using a directed adjacent relation tree. ISPRS Int. J. Geo-Inf. 2018, 7, 163. [Google Scholar] [CrossRef] [Green Version]
- Zheng, X.; Xiong, H.; Gong, J.; Yue, L. A robust channel network extraction method combining discrete curve evolution and skeleton construction technique. Adv. Water. Resour. 2015, 83, 17–27. [Google Scholar] [CrossRef]
- Guo, Q.; Yang, Z.; Feng, K. Extracting topographic characteristic line from contours. Geomat. Inf. Sci. Wuhan Univ. 2008, 33, 253–256. [Google Scholar]
- Li, C.; Guo, P.; Liu, X.; Yin, J.; Zhang, C. The method of adjacent relation judgment and automatic direction adjustment of contour. In Proceedings of the 25th International Conference on Geoinformatics, Buffalo, NY, USA, 2–4 August 2017; pp. 1–5. [Google Scholar]
- Raposo, P.; Touya, G.; Bereuter, P. A change of theme: The role of generalization in thematic mapping. ISPRS Int. J. Geo-Inf. 2020, 9, 371. [Google Scholar] [CrossRef]
- Yan, Q.; Zeng, Z. Geomorphology; Higher Education Press: Beijing, China, 1985. [Google Scholar]
- Guo, W.; Yu, A.; Sun, Q.; Li, S.; Xu, Q.; Wen, B.; Li, Y. A multisource contour matching method considering the similarity of geometric features. J. Geod. Geoinf. Sci. 2020, 3, 76–87. [Google Scholar]
- Cheng, M.; Sun, Q.; Kang, S.; Chen, H.; Yang, N.; Li, C. Direction relation matrix model considering the location characteristics. J. Phys. Conf. Ser. 2022, 2224, 012060. [Google Scholar] [CrossRef]
- Xing, R.; Wu, F.; Zhang, H.; Gong, X. Dual-carriageway road extraction based on facing project distance. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 152–158. [Google Scholar]
- Wang, J.; Sun, Q.; Wang, G.; Jiang, N.; Lyu, X. Principles and Methods of Cartography, 2nd eds; Science Press: Beijing, China, 2014. [Google Scholar]
- Topfer, F.; Pillewizer, W. The principles of selection. Cartogr. J. 1966, 3, 10–16. [Google Scholar] [CrossRef]
- Du, J.; Wu, F.; Xing, R.; Gong, X.; Yu, L. Segmentation and sampling method for complex polyline generalization based on a generative adversarial network. Geocarto Int. 2021, 37, 4158–4180. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Point Compression (%) | Horizontal Deviation (m/km) | Visible Valley Bend Reduction (%) |
|---|---|---|---|
| Method proposed in this study | 20.22 | 23.537 | 6.33 |
| Douglas–Peucker algorithm | 25.88 | 21.042 | 2.11 |
| Bend selection algorithm | 18.83 | 62.351 | 20.53 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Sun, Q.; Guo, W.; Xu, Q.; Zhu, X. A Contour Line Group Simplification Method Based on Classified Terrain Features. ISPRS Int. J. Geo-Inf. 2023, 12, 71. https://doi.org/10.3390/ijgi12020071
Li Y, Sun Q, Guo W, Xu Q, Zhu X. A Contour Line Group Simplification Method Based on Classified Terrain Features. ISPRS International Journal of Geo-Information. 2023; 12(2):71. https://doi.org/10.3390/ijgi12020071
Chicago/Turabian StyleLi, Yuanfu, Qun Sun, Wenyue Guo, Qing Xu, and Xinming Zhu. 2023. "A Contour Line Group Simplification Method Based on Classified Terrain Features" ISPRS International Journal of Geo-Information 12, no. 2: 71. https://doi.org/10.3390/ijgi12020071