


Imputation of Missing Parts in UAV Orthomosaics Using PlanetScope and Sentinel-2 Data: A Case Study in a Grass-Dominated Area
 ,
,  , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Materials and Methods
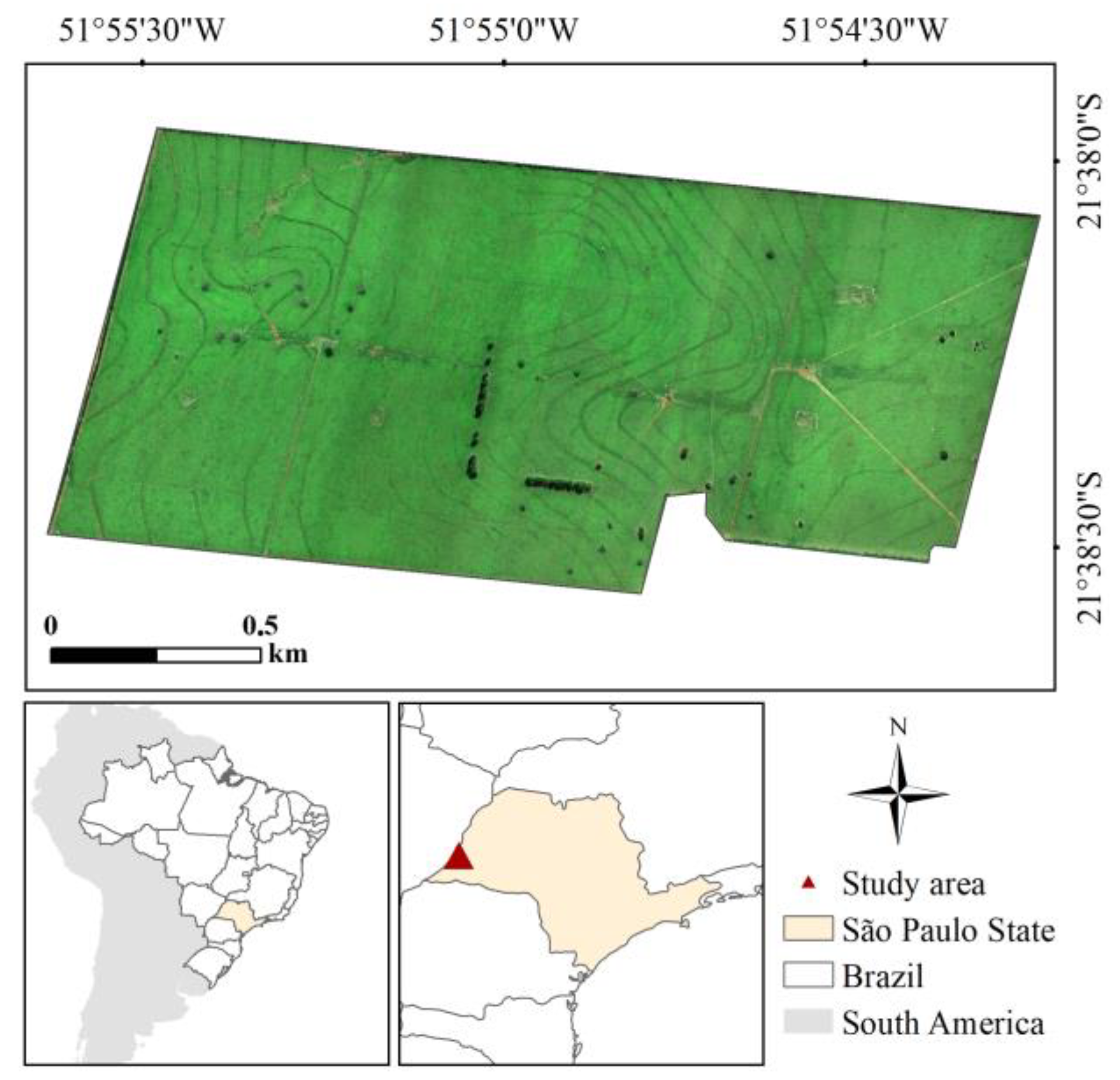
2.1. Study Area
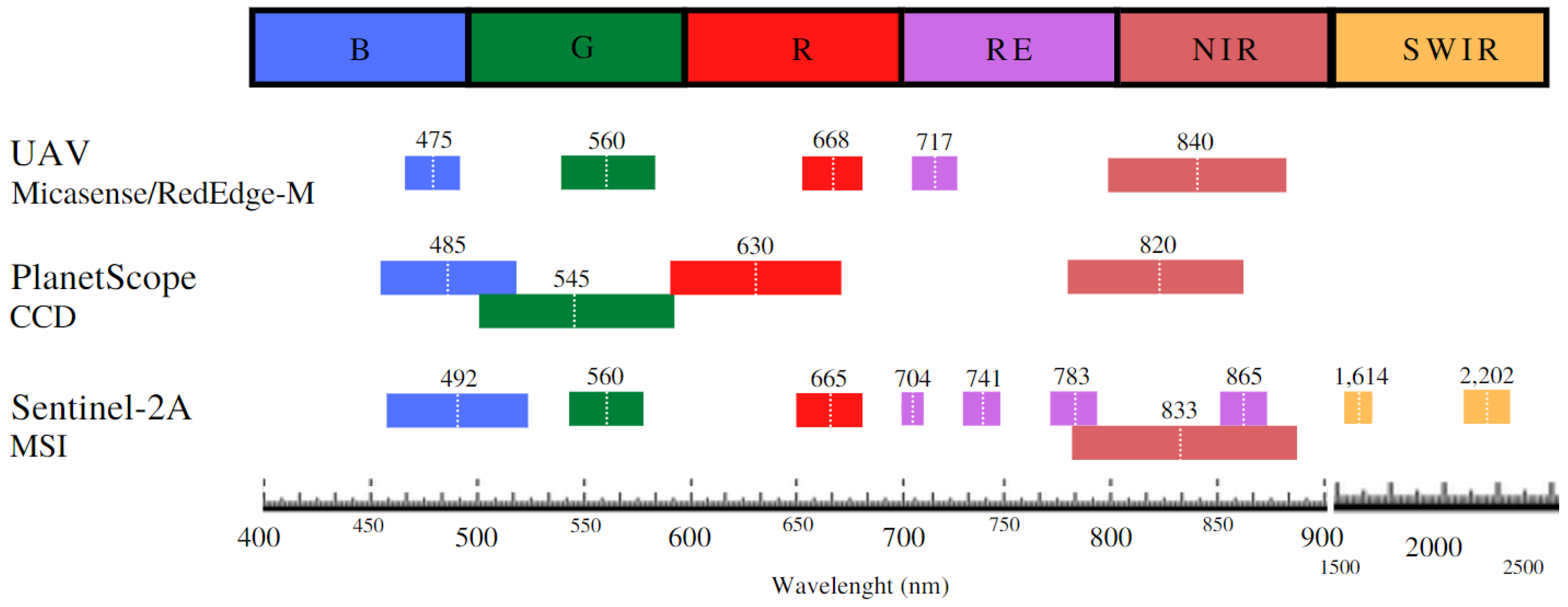
2.2. Remotely Sensed Data Collection and Pre-Processing
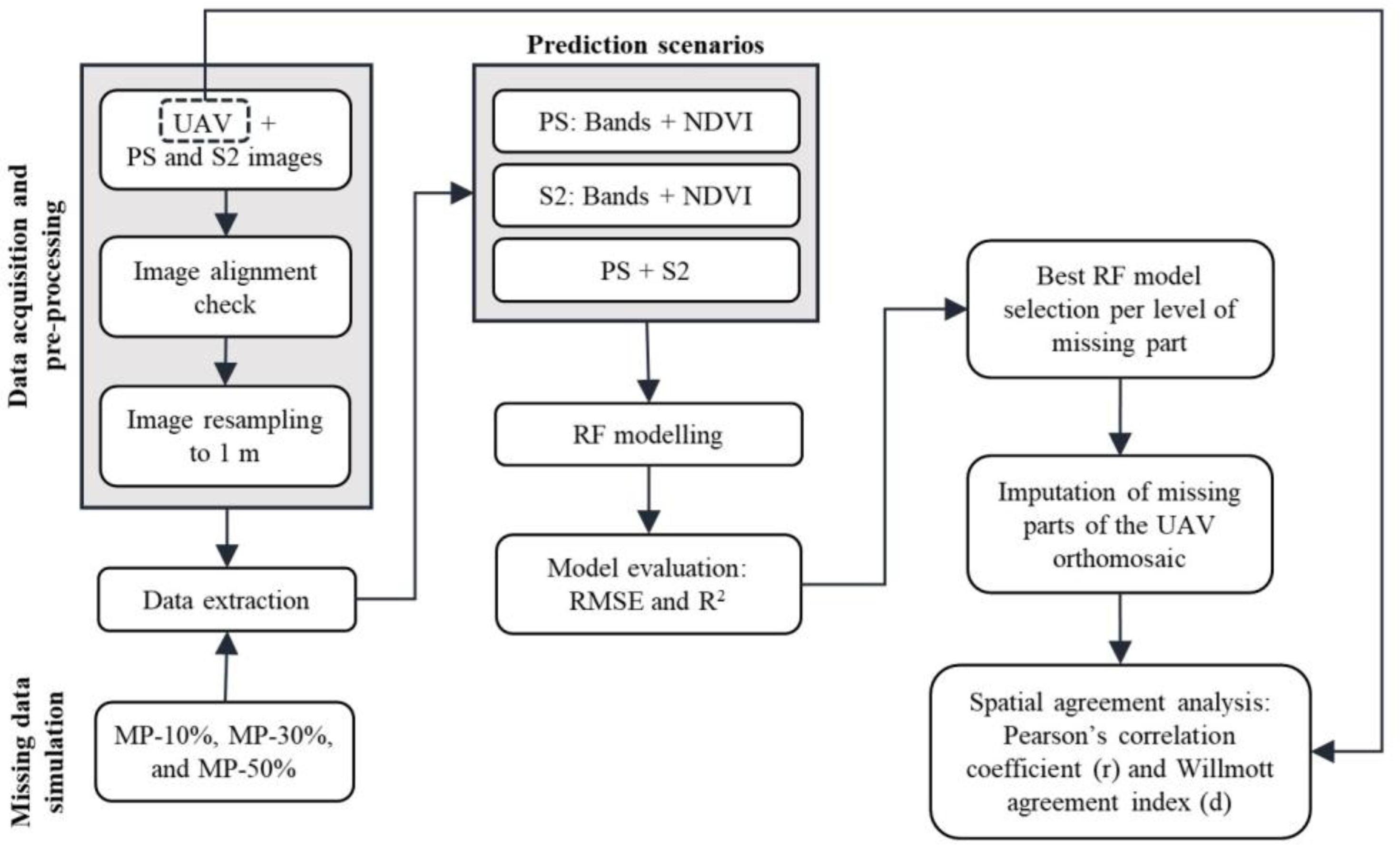
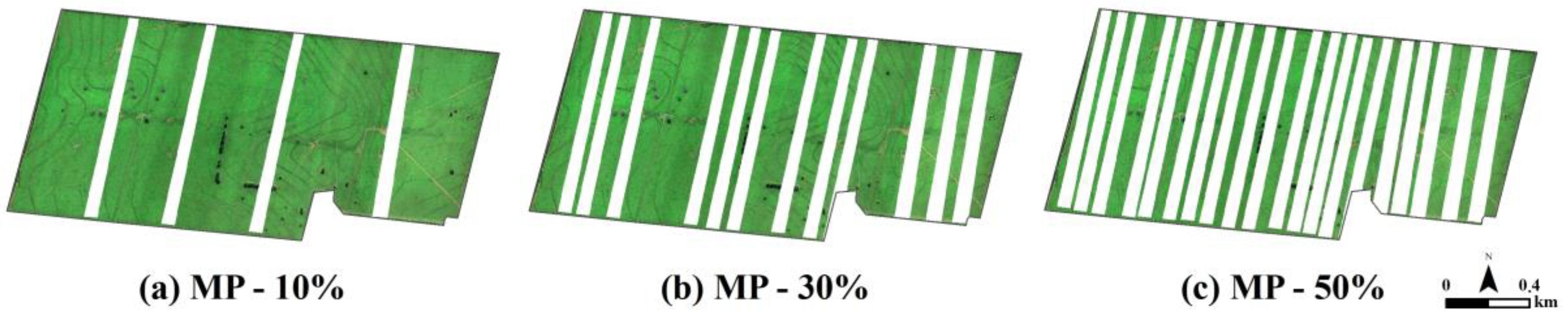
2.3. Data Extraction, Missing Part Simulation, and Dataset Division
2.4. Data Modelling
2.5. Model Evaluation and Agreement Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liaghat, S.; Balasundram, S.K. A Review: The Role of Remote Sensing in Precision Agriculture. Am. J. Agric. Biol. Sci. 2010, 5, 50–55. [Google Scholar] [CrossRef] [Green Version]
- Mulla, D.J. Twenty Five Years of Remote Sensing in Precision Agriculture: Key Advances and Remaining Knowledge Gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Kovacs, J.M. The Application of Small Unmanned Aerial Systems for Precision Agriculture: A Review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of Remote Sensing in Precision Agriculture: A Review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- Rossi, R.E.; Dungan, J.L.; Beck, L.R. Kriging in the Shadows: Geostatistical Interpolation for Remote Sensing. Remote Sens. Environ. 1994, 49, 32–40. [Google Scholar] [CrossRef]
- Jiang, J.; Zhang, Q.; Wang, W.; Wu, Y.; Zheng, H.; Yao, X.; Zhu, Y.; Cao, W.; Cheng, T. MACA: A Relative Radiometric Correction Method for Multiflight Unmanned Aerial Vehicle Images Based on Concurrent Satellite Imagery. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Zhang, C.; Li, W.; Travis, D.J. Restoration of Clouded Pixels in Multispectral Remotely Sensed Imagery with Cokriging. Int. J. Remote Sens. 2009, 30, 2173–2195. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, X.; Vogelmann, J.E.; Gao, F.; Jin, S. A Simple and Effective Method for Filling Gaps in Landsat ETM+ SLC-off Images. Remote Sens. Environ. 2011, 115, 1053–1064. [Google Scholar] [CrossRef]
- Gerber, F.; de Jong, R.; Schaepman, M.E.; Schaepman-Strub, G.; Furrer, R. Predicting Missing Values in Spatio-Temporal Remote Sensing Data. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2841–2853. [Google Scholar] [CrossRef] [Green Version]
- Siabi, N.; Sanaeinejad, S.H.; Ghahraman, B. Effective Method for Filling Gaps in Time Series of Environmental Remote Sensing Data: An Example on Evapotranspiration and Land Surface Temperature Images. Comput. Electron. Agric. 2022, 193, 106619. [Google Scholar] [CrossRef]
- Weiss, D.J.; Atkinson, P.M.; Bhatt, S.; Mappin, B.; Hay, S.I.; Gething, P.W. An Effective Approach for Gap-Filling Continental Scale Remotely Sensed Time-Series. ISPRS J. Photogramm. Remote Sens. 2014, 98, 106–118. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maxwell, S.K.; Schmidt, G.L.; Storey, J.C. A Multi-scale Segmentation Approach to Filling Gaps in Landsat ETM+ SLC-off Images. Int. J. Remote Sens. 2007, 28, 5339–5356. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, D.; Chen, J. A New Geostatistical Approach for Filling Gaps in Landsat ETM+ SLC-off Images. Remote Sens. Environ. 2012, 124, 49–60. [Google Scholar] [CrossRef]
- Chen, J.; Jönsson, P.; Tamura, M.; Gu, Z.; Matsushita, B.; Eklundh, L. A Simple Method for Reconstructing a High-Quality NDVI Time-Series Data Set Based on the Savitzky-Golay Filter. Remote Sens. Environ. 2004, 91, 332–344. [Google Scholar] [CrossRef]
- Kandasamy, S.; Baret, F.; Verger, A.; Neveux, P.; Weiss, M. A Comparison of Methods for Smoothing and Gap Filling Time Series of Remote Sensing Observations—Application to MODIS LAI Products. Biogeosciences 2013, 10, 4055–4071. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Jia, L.; Menenti, M. Reconstruction of Global MODIS NDVI Time Series: Performance of Harmonic ANalysis of Time Series (HANTS). Remote Sens. Environ. 2015, 163, 217–228. [Google Scholar] [CrossRef]
- Cai, Z.; Jönsson, P.; Jin, H.; Eklundh, L. Performance of Smoothing Methods for Reconstructing NDVI Time-Series and Estimating Vegetation Phenology from MODIS Data. Remote Sens. 2017, 9, 1271. [Google Scholar] [CrossRef]
- Moreno-Martínez, Á.; Izquierdo-Verdiguier, E.; Maneta, M.P.; Camps-Valls, G.; Robinson, N.; Muñoz-Marí, J.; Sedano, F.; Clinton, N.; Running, S.W. Multispectral High Resolution Sensor Fusion for Smoothing and Gap-Filling in the Cloud. Remote Sens. Environ. 2020, 247, 111901. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Liu, Y.; Ren, L.; Teuling, A.J.; Zhang, X.; Jiang, S.; Yang, X.; Wei, L.; Zhong, F.; Zheng, L. Reconstruction of ESA CCI Satellite-Derived Soil Moisture Using an Artificial Neural Network Technology. Sci. Total Environ. 2021, 782, 146602. [Google Scholar] [CrossRef]
- Sarafanov, M.; Kazakov, E.; Nikitin, N.O.; Kalyuzhnaya, A.V. A Machine Learning Approach for Remote Sensing Data Gap-Filling with Open-Source Implementation: An Example Regarding Land Surface Temperature, Surface Albedo and Ndvi. Remote Sens. 2020, 12, 3865. [Google Scholar] [CrossRef]
- Data, S.; Zhao, L.; Shi, Y.; Liu, B.; Hovis, C.; Duan, Y.; Shi, Z. Finer Classification of Crops by Fusing UAV Images and Sentinel-2A Data. Remote Sens. 2019, 11, 3012. [Google Scholar]
- Gränzig, T.; Fassnacht, F.E.; Kleinschmit, B.; Förster, M. Mapping the Fractional Coverage of the Invasive Shrub Ulex Europaeus with Multi-Temporal Sentinel-2 Imagery Utilizing UAV Orthoimages and a New Spatial Optimization Approach. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102281. [Google Scholar] [CrossRef]
- Drusch, M.; del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Planet Labs. Planet Imagery Product Specifications; Planet Labs: San Francisco, CA, USA, 2021. [Google Scholar]
- Planet Labs. Planet Surface Reflectance Version 2.0; Planet Labs: San Francisco, CA, USA, 2021. [Google Scholar]
- Rouse, J.W.; Hass, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. Third Earth Resour. Technol. Satell. (ERTS) Symp. 1973, 1, 309–317. [Google Scholar]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Tang, L.; Hupy, J.P.; Wang, Y.; Shao, G. A Commentary Review on the Use of Normalized Difference Vegetation Index (NDVI) in the Era of Popular Remote Sensing. J. Res. (Harbin) 2021, 32, 1–6. [Google Scholar] [CrossRef]
- Söderström, M.; Piikki, K.; Stenberg, M.; Stadig, H.; Martinsson, J. Producing Nitrogen (N) Uptake Maps in Winter Wheat by Combining Proximal Crop Measurements with Sentinel-2 and DMC Satellite Images in a Decision Support System for Farmers. Acta Agric. Scand B Soil Plant Sci. 2017, 67, 637–650. [Google Scholar] [CrossRef] [Green Version]
- Yang, C. High Resolution Satellite Imaging Sensors for Precision Agriculture. Front. Agric. Sci. Eng. 2018, 5, 393–405. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Feng, S.; Zhao, J.; Liu, T.; Zhang, H.; Zhang, Z.; Guo, X. Crop Type Identification and Mapping Using Machine Learning Algorithms and Sentinel-2 Time Series Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3295–3306. [Google Scholar] [CrossRef]
- Daroczi, G. Mastering Data Analysis with R: Gain Clear Insights into Your Data and Solve Real-World Data Science Problems with R—From Data Munging to Modeling and Visualization; Packt Publishing Ltd.: Birmingham, UK, 2015; ISBN 9781783982028. [Google Scholar]
- Belgiu, M.; Drăgu, L. Random Forest in Remote Sensing: A Review of Applications and Future Directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Bergstra, J.; Bengio, Y. Random Search for Hyper-Parameter Optimization. J. Mach. Learn. Res. 2012, 13, 281–305. [Google Scholar]
- Bischl, B.; Lang, M.; Kotthoff, L.; Schiffner, J.; Richter, J.; Studerus, E.; Casalicchio, G.; Jones, Z.M. Mlr: Machine Learning in R. J. Mach. Learn. Res. 2016, 17, 5938–5942. [Google Scholar]
- Willmott, C.J. On the Validation of Models. Phys. Geogr. 1981, 2, 184–194. [Google Scholar] [CrossRef]
- Zhang, C.; Li, W.; Travis, D.J. Gaps-fill of SLC-off Landsat ETM+ Satellite Image Using a Geostatistical Approach. Int. J. Remote Sens. 2007, 28, 5103–5122. [Google Scholar] [CrossRef]
- Pringle, M.J.; Schmidt, M.; Muir, J.S. Geostatistical Interpolation of SLC-off Landsat ETM+ Images. ISPRS J. Photogramm. Remote Sens. 2009, 64, 654–664. [Google Scholar] [CrossRef]
- Safyan, M. Planet’s Dove Satellite Constellation. In Handbook of Small Satellites; Springer International Publishing: Cham, Switzerland, 2020; pp. 1–17. ISBN 9783030207076. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Missing Part Percentage | Predictor Imagery | Error Statistics | Spectral Variable | |||||
|---|---|---|---|---|---|---|---|---|
| Blue | Green | Red | Red-Edge | NIR | NDVI | |||
| 10% | PS | RMSE | 0.0068 | 0.0121 | 0.0170 | 0.0209 | 0.0142 | 0.0814 |
| RMSE% | 12.33 | 9.59 | 18.18 | 8.84 | 7.97 | 18.81 | ||
| R² | 0.36 | 0.48 | 0.39 | 0.43 | 0.46 | 0.43 | ||
| S2 | RMSE | 0.0059 | 0.0112 | 0.0160 | 0.0211 | 0.0133 | 0.0797 | |
| RMSE% | 10.73 | 8.89 | 17.07 | 8.92 | 7.44 | 18.44 | ||
| R² | 0.48 | 0.58 | 0.43 | 0.50 | 0.61 | 0.38 | ||
| PS + S2 | RMSE | 0.0055 | 0.0103 | 0.0148 | 0.0192 | 0.0122 | 0.0745 | |
| RMSE% | 9.99 | 8.17 | 15.77 | 8.12 | 6.82 | 17.23 | ||
| R2 | 0.50 | 0.52 | 0.43 | 0.46 | 0.53 | 0.40 | ||
| 30% | PS | RMSE | 0.0068 | 0.0121 | 0.0170 | 0.0209 | 0.0142 | 0.0814 |
| RMSE% | 12.35 | 9.66 | 18.19 | 8.85 | 7.96 | 18.82 | ||
| R2 | 0.35 | 0.48 | 0.37 | 0.46 | 0.46 | 0.43 | ||
| S2 | RMSE | 0.0059 | 0.0112 | 0.0160 | 0.0211 | 0.0133 | 0.0799 | |
| RMSE% | 10.77 | 8.92 | 17.08 | 8.92 | 7.49 | 18.48 | ||
| R2 | 0.48 | 0.59 | 0.42 | 0.51 | 0.63 | 0.38 | ||
| PS + S2 | RMSE | 0.0055 | 0.0103 | 0.0148 | 0.0192 | 0.0121 | 0.0747 | |
| RMSE% | 10.03 | 8.19 | 15.75 | 8.12 | 6.82 | 17.28 | ||
| R2 | 0.45 | 0.52 | 0.41 | 0.47 | 0.47 | 0.40 | ||
| 50% | PS | RMSE | 0.0069 | 0.0122 | 0.0172 | 0.0211 | 0.0142 | 0.0818 |
| RMSE% | 12.49 | 9.68 | 18.38 | 8.91 | 7.98 | 18.91 | ||
| R2 | 0.38 | 0.48 | 0.39 | 0.49 | 0.46 | 0.45 | ||
| S2 | RMSE | 0.0058 | 0.0111 | 0.0158 | 0.0158 | 0.0132 | 0.0798 | |
| RMSE% | 10.64 | 8.83 | 16.91 | 16.91 | 7.40 | 18.46 | ||
| R2 | 0.50 | 0.58 | 0.45 | 0.45 | 0.62 | 0.40 | ||
| PS + S2 | RMSE | 0.0055 | 0.0102 | 0.0147 | 0.0191 | 0.0121 | 0.0749 | |
| RMSE% | 9.95 | 8.15 | 15.72 | 8.10 | 6.77 | 17.33 | ||
| R2 | 0.47 | 0.52 | 0.43 | 0.48 | 0.53 | 0.41 | ||
| Missing Data Percentage | Predictor Imagery | Agreement Parameter | Spectral Variable | |||||
|---|---|---|---|---|---|---|---|---|
| Blue | Green | Red | Red-Edge | NIR | NDVI | |||
| 10% | PS | r | 0.50 | 0.59 | 0.52 | 0.59 | 0.58 | 0.54 |
| d | 0.66 | 0.74 | 0.68 | 0.73 | 0.72 | 0.70 | ||
| S2 | r | 0.65 | 0.67 | 0.59 | 0.61 | 0.55 | 0.55 | |
| d | 0.77 | 0.79 | 0.72 | 0.54 | 0.62 | 0.70 | ||
| PS + S2 | r | 0.70 | 0.73 | 0.67 | 0.72 | 0.66 | 0.62 | |
| d | 0.80 | 0.82 | 0.77 | 0.82 | 0.77 | 0.74 | ||
| 30% | PS | r | 0.49 | 0.57 | 0.54 | 0.53 | 0.51 | 0.56 |
| d | 0.63 | 0.71 | 0.67 | 0.68 | 0.68 | 0.70 | ||
| S2 | r | 0.69 | 0.66 | 0.65 | 0.53 | 0.53 | 0.60 | |
| d | 0.80 | 0.79 | 0.77 | 0.68 | 0.70 | 0.73 | ||
| PS + S2 | r | 0.73 | 0.72 | 0.70 | 0.68 | 0.61 | 0.66 | |
| d | 0.82 | 0.82 | 0.80 | 0.79 | 0.74 | 0.77 | ||
| 50% | PS | r | 0.45 | 0.58 | 0.51 | 0.53 | 0.50 | 0.54 |
| d | 0.62 | 0.72 | 0.67 | 0.67 | 0.67 | 0.69 | ||
| S2 | r | 0.64 | 0.65 | 0.57 | 0.62 | 0.53 | 0.57 | |
| d | 0.77 | 0.78 | 0.72 | 0.76 | 0.69 | 0.72 | ||
| PS + S2 | r | 0.69 | 0.71 | 0.66 | 0.67 | 0.60 | 0.63 | |
| d | 0.79 | 0.81 | 0.77 | 0.78 | 0.73 | 0.75 | ||
| Predictor Imagery | Missing Data Percentage | Agreement Parameter | NDVI | |
|---|---|---|---|---|
| Predicted | Calculated | |||
| PS + S2 | 10% | r | 0.62 | 0.62 |
| d | 0.74 | 0.74 | ||
| 30% | r | 0.66 | 0.65 | |
| d | 0.77 | 0.77 | ||
| 50% | r | 0.63 | 0.63 | |
| d | 0.75 | 0.75 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pereira, F.R.d.S.; Dos Reis, A.A.; Freitas, R.G.; Oliveira, S.R.d.M.; Amaral, L.R.d.; Figueiredo, G.K.D.A.; Antunes, J.F.G.; Lamparelli, R.A.C.; Moro, E.; Magalhães, P.S.G. Imputation of Missing Parts in UAV Orthomosaics Using PlanetScope and Sentinel-2 Data: A Case Study in a Grass-Dominated Area. ISPRS Int. J. Geo-Inf. 2023, 12, 41. https://doi.org/10.3390/ijgi12020041
Pereira FRdS, Dos Reis AA, Freitas RG, Oliveira SRdM, Amaral LRd, Figueiredo GKDA, Antunes JFG, Lamparelli RAC, Moro E, Magalhães PSG. Imputation of Missing Parts in UAV Orthomosaics Using PlanetScope and Sentinel-2 Data: A Case Study in a Grass-Dominated Area. ISPRS International Journal of Geo-Information. 2023; 12(2):41. https://doi.org/10.3390/ijgi12020041
Chicago/Turabian StylePereira, Francisco R. da S., Aliny A. Dos Reis, Rodrigo G. Freitas, Stanley R. de M. Oliveira, Lucas R. do Amaral, Gleyce K. D. A. Figueiredo, João F. G. Antunes, Rubens A. C. Lamparelli, Edemar Moro, and Paulo S. G. Magalhães. 2023. "Imputation of Missing Parts in UAV Orthomosaics Using PlanetScope and Sentinel-2 Data: A Case Study in a Grass-Dominated Area" ISPRS International Journal of Geo-Information 12, no. 2: 41. https://doi.org/10.3390/ijgi12020041