
A Heuristic Approach for Resolving Spatial Conflicts of Buildings in Urban Villages

Abstract
:1. Introduction
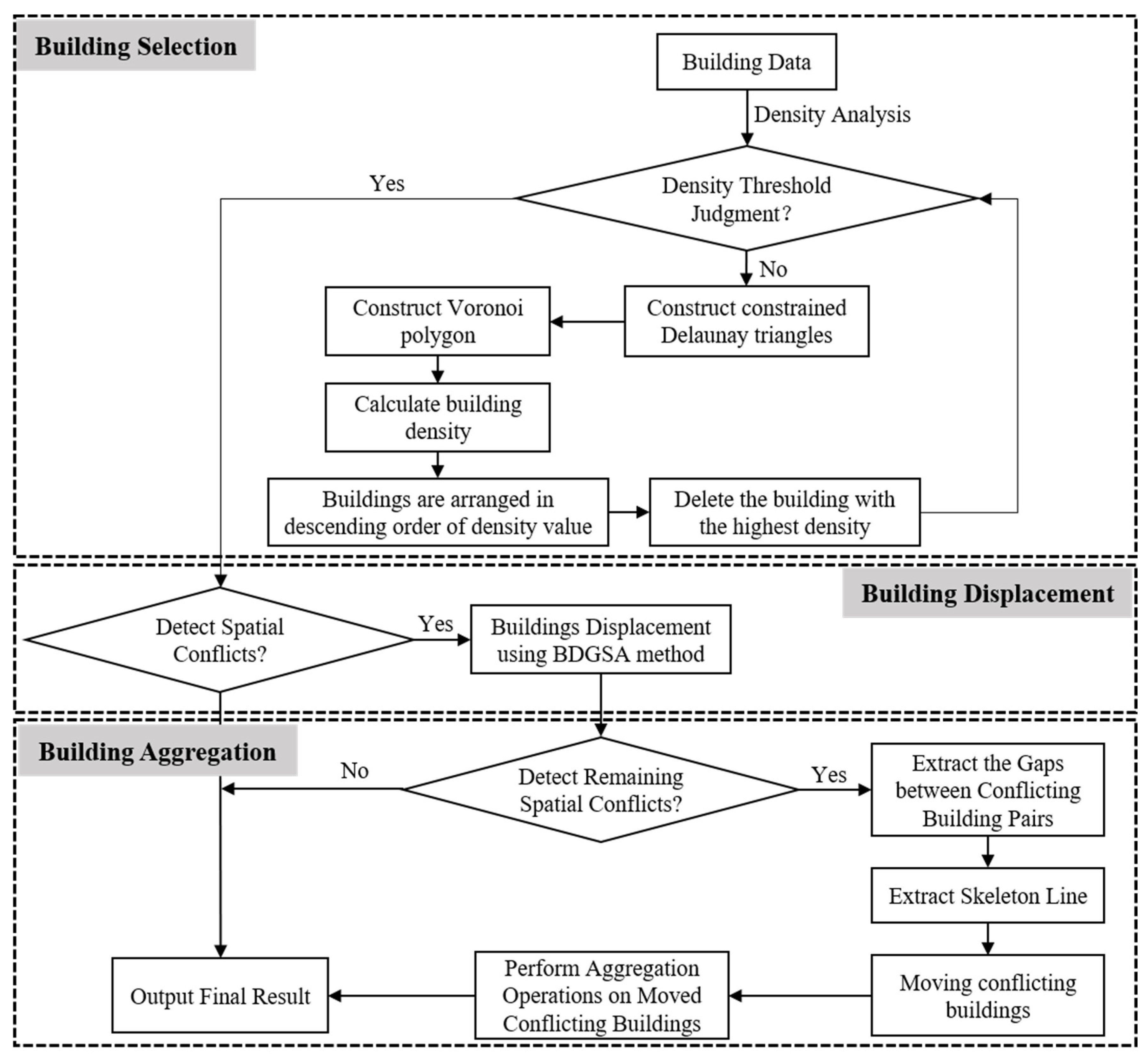
- A new heuristic framework for resolving spatial conflicts of building features that combines the three cartographic generalization operators of selection, displacement, and aggregation.
- An efficient and intelligent algorithm for displacing buildings in urban villages. This algorithm is called Building Displacement based on Genetic Simulated Annealing Algorithm (BDGSA), and can be used to solve spatial conflicts between buildings and other features.
2. Related Works
3. Methodologies
3.1. Building Selection Operation
3.2. Building Displacement Operation
3.2.1. Population Initialization
3.2.2. Genetic Operations
3.2.3. Simulated Annealing Operation
3.2.4. Objective Function
3.2.5. Algorithm Flow
- Initialize control parameters: population size, , maximum number of iterations , chromosome selection probability, , crossover probability, , mutation probability, , annealing initial temperature, , temperature cooling coefficient, , and termination temperature, .
- According to the coding method, randomly generate chromosome s to form the initial population and use Equations (5) and (9) to calculate the fitness value, , of each chromosome in the population, where .
- Set loop variable .
- Perform genetic operations on the population to generate a new offspring population and calculate the fitness value, , of each chromosome in the offspring population.
- Perform simulated annealing operation on the chromosomes in the offspring population, i.e., the fitness value, , of each chromosome in the offspring population is compared with the fitness value, , of the corresponding chromosome in the parent population. If , then replace the existing chromosome with the new chromosome. Otherwise, accept the new chromosome with probability .
- If , increase the loop variable by 1, , and return to step (4). Otherwise, transpose step (7).
- If the current temperature, , is less than the end temperature, , i.e., , the algorithm ends and returns to the global optimal solution. Otherwise, the cooling operation is performed, i.e., , and transpose step (3).
- According to the returned global optimal solution, i.e., the amount of displacement in the direction and the amount of displacement amount in the direction corresponding to each building, perform the displacement operation on the building to obtain the result of the displacement of the building.
3.3. Building Aggregation Operation
4. Experiments and Evaluations
4.1. Experimental Data
4.2. Setting Parameters
4.3. Spatial Conflict Detection
4.4. Experimental Results and Evaluation of the Building Selection Operation
4.5. Experimental Results and Evaluation of the Building Displacement Operation
4.6. Experimental Results and Evaluation of the Building Aggregation Operation
5. Discussion
- For the legibility constraint, the total numbers of remaining spatial conflicts after building displacement using the BDGSA, GA, and SA are 10, 13, and 4, respectively, and the proportions of conflict resolution are 87.5%, 83.75%, and 95%, respectively. Therefore, in terms of the ability to resolve spatial conflicts independently, SA is the best, followed by the BDGSA. The reason for this situation is that the objective function of the BDGSA is constructed with the number of spatial conflicts and the total displacement distance as constraints, whereas the objective function of SA is constructed only with the number of spatial conflicts as a constraint. The different constraints considered in the objective function led to the much larger displacement distance of SA than that of the BDGSA.
- For the positional accuracy constraint, the total displacement distances of the BDGSA, GA and SA are 20.895 m, 28.974 m, and 95.334 m, respectively. It can be seen from the statistical information that the total displacement distance of the BDGSA proposed in this study is the shortest, while the total displacement distance of SA is the largest. Therefore, the proposed BDGSA can better maintain the positional accuracy constraints of the displaced buildings, while the SA cannot.
- The statistical information that the minimum amount of displacement of buildings using the BDGSA in each block is 0.000 m, while the minimum displacements of the GA and SA are greater than 0 m. This suggests that if some buildings in the BDGSA do not conflict with any neighboring objects, they will not be moved to maintain position accuracy. If the area of a conflicting building is larger, it indicates that the building is relatively important, and its location accuracy should be ensured as much as possible without displacement.
- The average displacement distance of buildings in each block of the BDGSA is smaller than the corresponding blocks of the GA and SA, which shows that the BDGSA displacement method has a shorter displacement distance. Compared with the BDGSA and GA, the SA exhibits the largest average displacement value in each block, which shows that the SA is weak in maintaining the accuracy of the building displacement. The main reason is that SA tries to designate displacement candidate positions in a continuous displacement space; therefore, the size of the displacement distance is greatly affected by the subsequent positions.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, M.; Yuan, T.; Yan, X.; Ai, T.; Jiang, C. A hybrid approach to building simplification with an evaluator from a backpropagation neural network. Int. J. Geogr. Inf. Sci. 2022, 36, 280–309. [Google Scholar] [CrossRef]
- Zhou, Z.; Fu, C.; Weibel, R. Move and remove: Multi-task learning for building simplification in vector maps with a graph convolutional neural network. ISPRS J. Photogamm. Remote Sens. 2023, 202, 205–218. [Google Scholar] [CrossRef]
- Karsznia, I.; Weibel, R. Improving settlement selection for small-scale maps using data enrichment and machine learning. Cartogr. Geogr. Inf. Sci. 2018, 45, 111–127. [Google Scholar] [CrossRef]
- Wang, X.; Burghardt, D. A typification method for linear building groups based on stroke simplification. Geocarto Int. 2021, 36, 1732–1751. [Google Scholar] [CrossRef]
- Gong, X.; Wu, F. A typification method for linear pattern in urban building generalisation. Geocarto Int. 2018, 33, 189–207. [Google Scholar] [CrossRef]
- Burghardt, D.; Cecconi, A. Mesh simplification for building typification. Int. J. Geogr. Inf. Sci. 2007, 21, 283–298. [Google Scholar] [CrossRef]
- Yu, W.; Zhang, Y.; Chen, Z.; Ai, T. Sparse reconstruction with spatial structures to automatically determine neighbors. Int. J. Geogr. Inf. Sci. 2022, 36, 338–359. [Google Scholar] [CrossRef]
- Yan, X.; Ai, T.; Yang, M.; Yin, H. A graph convolutional neural network for classification of building patterns using spatial vector data. ISPRS J. Photogamm. Remote Sens. 2019, 150, 259–273. [Google Scholar] [CrossRef]
- He, X.; Zhang, X.; Xin, Q. Recognition of building group patterns in topographic maps based on graph partitioning and random forest. ISPRS J. Photogamm. Remote Sens. 2018, 136, 26–40. [Google Scholar] [CrossRef]
- Staněk, K.; Šilhák, P.; Ryglová, A. A graphical generalization of localized morphological discontinuities on medium-scale state topographic maps. J. Geovisualization Spat. Anal. 2022, 6, 20. [Google Scholar] [CrossRef]
- Harrie, L.; Oucheikh, R.; Nilsson, Å.; Oxenstierna, A.; Cederholm, P.; Wei, L.; Richter, K.-F.; Olsson, P. Label placement challenges in city wayfinding map production—Identification and possible solutions. J. Geovisualization Spat. Anal. 2022, 6, 16. [Google Scholar] [CrossRef]
- Pilehforooshha, P.; Karimi, M.; Mansourian, A. A new model combining building block displacement and building block area reduction for resolving spatial conflicts. Trans. GIS 2021, 25, 1366–1395. [Google Scholar] [CrossRef]
- Ai, T.; Yin, H.; Shen, Y.; Yang, M.; Wang, L. A formal model of neighborhood representation and applications in urban building aggregation supported by Delaunay triangulation. PLoS ONE 2019, 14, e0218877. [Google Scholar] [CrossRef] [PubMed]
- Guo, Q.; Li, G.; Wang, Y.; Liu, J.; Wei, Z. The method of progressive typification for building groups with straight linear patterns. Acta Geodaetica Cartogr. Sin. 2020, 49, 1354–1364. [Google Scholar] [CrossRef]
- Wei, Z.; He, J.; Wang, L.; Wang, Y.; Guo, Q. A collaborative displacement approach for spatial conflicts in urban building map generalization. IEEE Access 2018, 6, 26918–26929. [Google Scholar] [CrossRef]
- Ai, T.; Zhang, X.; Zhou, Q.; Yang, M. A vector field model to handle the displacement of multiple conflicts in building generalization. Int. J. Geogr. Inf. Sci. 2015, 29, 1310–1331. [Google Scholar] [CrossRef]
- Mackaness, W.A. An algorithm for conflict identification and feature displacement in automated map generalization. Cartogr. Geogr. Inf. Sci. 1994, 21, 219–232. [Google Scholar] [CrossRef]
- RUAS, A. A method for building displacement in automated map generalisation. Int. J. Geogr. Inf. Sci. 1998, 12, 789–803. [Google Scholar] [CrossRef]
- Lonergan, M.; Jones, C.B. An iterative displacement method for conflict resolution in map generalization. Algorithmica 2001, 30, 287–301. [Google Scholar] [CrossRef]
- Basaraner, M. A zone-based iterative building displacement method through the collective use of Voronoi Tessellation, spatial analysis and multicriteria decision making. Bol. Ciênc. Geod. 2011, 17, 161–187. [Google Scholar] [CrossRef]
- Sahbaz, K.; Basaraner, M. A zonal displacement approach via grid point weighting in building generalization. ISPRS Int. J. Geo-Inf. 2021, 10, 105. [Google Scholar] [CrossRef]
- Chen, G.; Qian, H. A method for regularizing buildings through combining skeleton lines and minkowski addition. ISPRS Int. J. Geo-Inf. 2023, 12, 363. [Google Scholar] [CrossRef]
- Højholt, P. Solving space conflicts in map generalization: Using a finite element method. Cartogr. Geogr. Inf. Sci. 2000, 27, 65–74. [Google Scholar] [CrossRef]
- Harrie, L.; Sarjakoski, T. Simultaneous graphic generalization of vector data sets. GeoInformatica 2002, 6, 233–261. [Google Scholar] [CrossRef]
- Sester, M. Optimization approaches for generalization and data abstraction. Int. J. Geogr. Inf. Sci. 2005, 19, 871–897. [Google Scholar] [CrossRef]
- Bader, M.; Barrault, M.; Weibel, R. Building displacement over a ductile truss. Int. J. Geogr. Inf. Sci. 2005, 19, 915–936. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, Q.; Sun, Y.; Ma, X. A combined approach to cartographic displacement for buildings based on skeleton and improved elastic beam algorithm. PLoS ONE 2014, 9, e113953. [Google Scholar] [CrossRef]
- Maruyama, K.; Takahashi, S.; Wu, H.; Misue, K.; Arikawa, M. Scale-Aware cartographic displacement based on constrained optimization. In Proceedings of the 2019 23rd International Conference Information Visualisation (IV), Paris, France, 2–5 July 2019; pp. 74–80. [Google Scholar] [CrossRef]
- Ware, J.M.; Jones, C.B. Conflict reduction in map generalization using iterative improvement. GeoInformatica 1998, 2, 383–407. [Google Scholar] [CrossRef]
- Ware, J.M.; Jones, C.B.; Thomas, N. Automated map generalization with multiple operators: A simulated annealing approach. Int. J. Geogr. Inf. Sci. 2003, 17, 743–769. [Google Scholar] [CrossRef]
- Wilson, I.D.; Ware, J.M.; Ware, J.A. A Genetic Algorithm approach to cartographic map generalisation. Comput. Ind. 2003, 52, 291–304. [Google Scholar] [CrossRef]
- Sun, Y.; Guo, Q.; Liu, Y.; Ma, X.; Weng, J. An immune genetic algorithm to buildings displacement in cartographic generalization. Trans. GIS 2016, 20, 585–612. [Google Scholar] [CrossRef]
- Huang, H.; Guo, Q.; Sun, Y.; Liu, Y. Reducing building conflicts in map generalization with an improved PSO algorithm. ISPRS Int. J. Geo-Inf. 2017, 6, 127. [Google Scholar] [CrossRef]
- Li, W.; Ai, T.; Shen, Y.; Yang, W.; Wang, W. A novel method for building displacement based on multipopulation genetic algorithm. Appl. Sci. 2020, 10, 8441. [Google Scholar] [CrossRef]
- Ai, T.; Zhang, X. The aggregation of urban building clusters based on the skeleton partitioning of gap space. In The European Information Society; Fabrikant, S.I., Wachowicz, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 153–170. [Google Scholar]
- Schaffer, J.D.; Caruana, R.A.; Eshelman, L.J.; Das, R. A study of control parameters affecting online performance of genetic algorithms for function optimization. In Proceedings of the Third International Conference on Genetic Algorithms; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1989; pp. 51–60. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Block ID | Before Selection | After Selection | ||||||
|---|---|---|---|---|---|---|---|---|
| Number of Buildings | Block Density | <B-B> Number of Conflicts | <B-R> Number of Conflicts | Number of Buildings | Block Density | <B-B> Number of Conflicts | <B-R> Number of Conflicts | |
| ➀ | 20 | 0.74 | 0 | 13 | 13 | 0.57 | 0 | 10 |
| ➁ | 40 | 0.71 | 9 | 14 | 26 | 0.56 | 6 | 7 |
| ➂ | 69 | 0.71 | 23 | 28 | 48 | 0.57 | 15 | 17 |
| ➃ | 41 | 0.80 | 20 | 24 | 28 | 0.62 | 8 | 17 |
| 170 | — | 52 | 79 | 115 | — | 29 | 51 | |
| Block ID | Number of Buildings | Before Displacement | MaxGen | Nump | After Displacement | Total Displacement Distance (m) | ||
|---|---|---|---|---|---|---|---|---|
| <B-B> Number of Conflicts | <B-R> Number of Conflicts | <B-B> Number of Conflicts | <B-B> Number of Conflicts | |||||
| ➀ | 13 | 0 | 10 | 11 × 195 | 40 | 0 | 0 | 3.606 |
| ➁ | 26 | 6 | 7 | 11 × 390 | 52 | 2 | 0 | 4.566 |
| ➂ | 48 | 15 | 17 | 11 × 720 | 128 | 3 | 1 | 6.441 |
| ➃ | 28 | 8 | 17 | 11 × 420 | 100 | 4 | 0 | 6.282 |
| 115 | 29 | 51 | — | — | 9 | 1 | 20.895 | |
| Block ID | Number of Buildings | Before Displacement | MaxGen | Nump | After Displacement | Total Displacement Distance (m) | ||
|---|---|---|---|---|---|---|---|---|
| <B-B> Number of Conflicts | <B-R> Number of Conflicts | <B-B> Number of Conflicts | <B-B> Number of Conflicts | |||||
| ➀ | 13 | 0 | 10 | 195 | 40 | 0 | 0 | 5.621 |
| ➁ | 26 | 6 | 7 | 390 | 52 | 3 | 1 | 5.277 |
| ➂ | 48 | 15 | 17 | 720 | 128 | 3 | 1 | 10.272 |
| ➃ | 28 | 8 | 17 | 420 | 100 | 5 | 0 | 7.804 |
| 115 | 29 | 51 | — | — | 11 | 2 | 28.974 | |
| Block ID | Number of Buildings | Before Displacement | Number of Cooling | After Displacement | Total Displacement Distance (m) | ||
|---|---|---|---|---|---|---|---|
| <B-B> Number of Conflicts | <B-R> Number of Conflicts | <B-B> Number of Conflicts | <B-R> Number of Conflicts | ||||
| ➀ | 13 | 0 | 10 | 50 | 0 | 0 | 10.000 |
| ➁ | 26 | 6 | 7 | 50 | 1 | 0 | 22.000 |
| ➂ | 48 | 15 | 17 | 50 | 0 | 0 | 38.667 |
| ➃ | 28 | 8 | 17 | 50 | 3 | 0 | 24.667 |
| 115 | 29 | 51 | — | 4 | 0 | 95.334 | |
| Block ID | Number of Buildings | Displacement Distance (m) | ||||
|---|---|---|---|---|---|---|
| Minimum | Maximum | Sum | Average | Standard Deviation | ||
| ➀ | 13 | 0.000 | 0.886 | 3.606 | 0.277 | 0.259 |
| ➁ | 26 | 0.000 | 0.561 | 4.566 | 0.176 | 0.214 |
| ➂ | 48 | 0.000 | 0.492 | 6.441 | 0.134 | 0.168 |
| ➃ | 28 | 0.000 | 0.752 | 6.282 | 0.224 | 0.214 |
| Block ID | Number of Buildings | Displacement Distance (m) | ||||
|---|---|---|---|---|---|---|
| Minimum | Maximum | Sum | Average | Standard Deviation | ||
| ➀ | 13 | 0.009 | 0.800 | 5.621 | 0.432 | 0.282 |
| ➁ | 26 | 0.009 | 0.558 | 5.277 | 0.203 | 0.192 |
| ➂ | 48 | 0.010 | 0.828 | 10.272 | 0.214 | 0.191 |
| ➃ | 28 | 0.019 | 0.694 | 7.804 | 0.279 | 0.211 |
| Block ID | Number of Buildings | Displacement Distance (m) | ||||
|---|---|---|---|---|---|---|
| Minimum | Maximum | Sum | Average | Standard Deviation | ||
| ➀ | 13 | 0.333 | 1.000 | 10.000 | 0.769 | 0.274 |
| ➁ | 26 | 0.333 | 1.000 | 22.000 | 0.846 | 0.190 |
| ➂ | 48 | 0.333 | 1.000 | 38.667 | 0.806 | 0.224 |
| ➃ | 28 | 0.333 | 1.000 | 24.667 | 0.881 | 0.203 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Yan, H.; Lu, X.; Shen, Y. A Heuristic Approach for Resolving Spatial Conflicts of Buildings in Urban Villages. ISPRS Int. J. Geo-Inf. 2023, 12, 392. https://doi.org/10.3390/ijgi12100392
Li W, Yan H, Lu X, Shen Y. A Heuristic Approach for Resolving Spatial Conflicts of Buildings in Urban Villages. ISPRS International Journal of Geo-Information. 2023; 12(10):392. https://doi.org/10.3390/ijgi12100392
Chicago/Turabian StyleLi, Wende, Haowen Yan, Xiaomin Lu, and Yilang Shen. 2023. "A Heuristic Approach for Resolving Spatial Conflicts of Buildings in Urban Villages" ISPRS International Journal of Geo-Information 12, no. 10: 392. https://doi.org/10.3390/ijgi12100392