
Minimum Energy Utilization Strategy for Fleet of Autonomous Robots in Urban Waste Management

Abstract
:1. Introduction
2. State of the Art
3. Materials and Methods
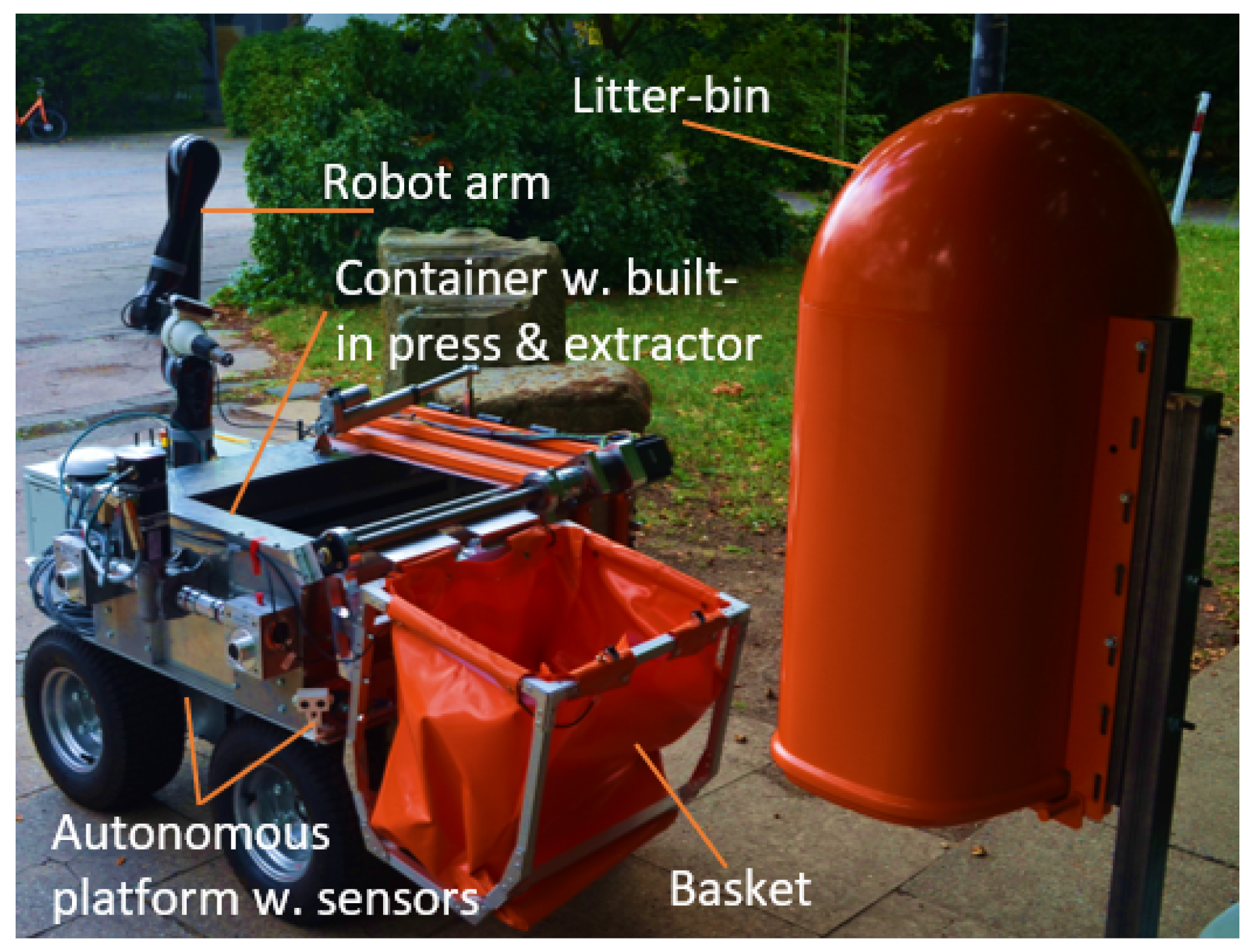
3.1. MARBLE and SEAs
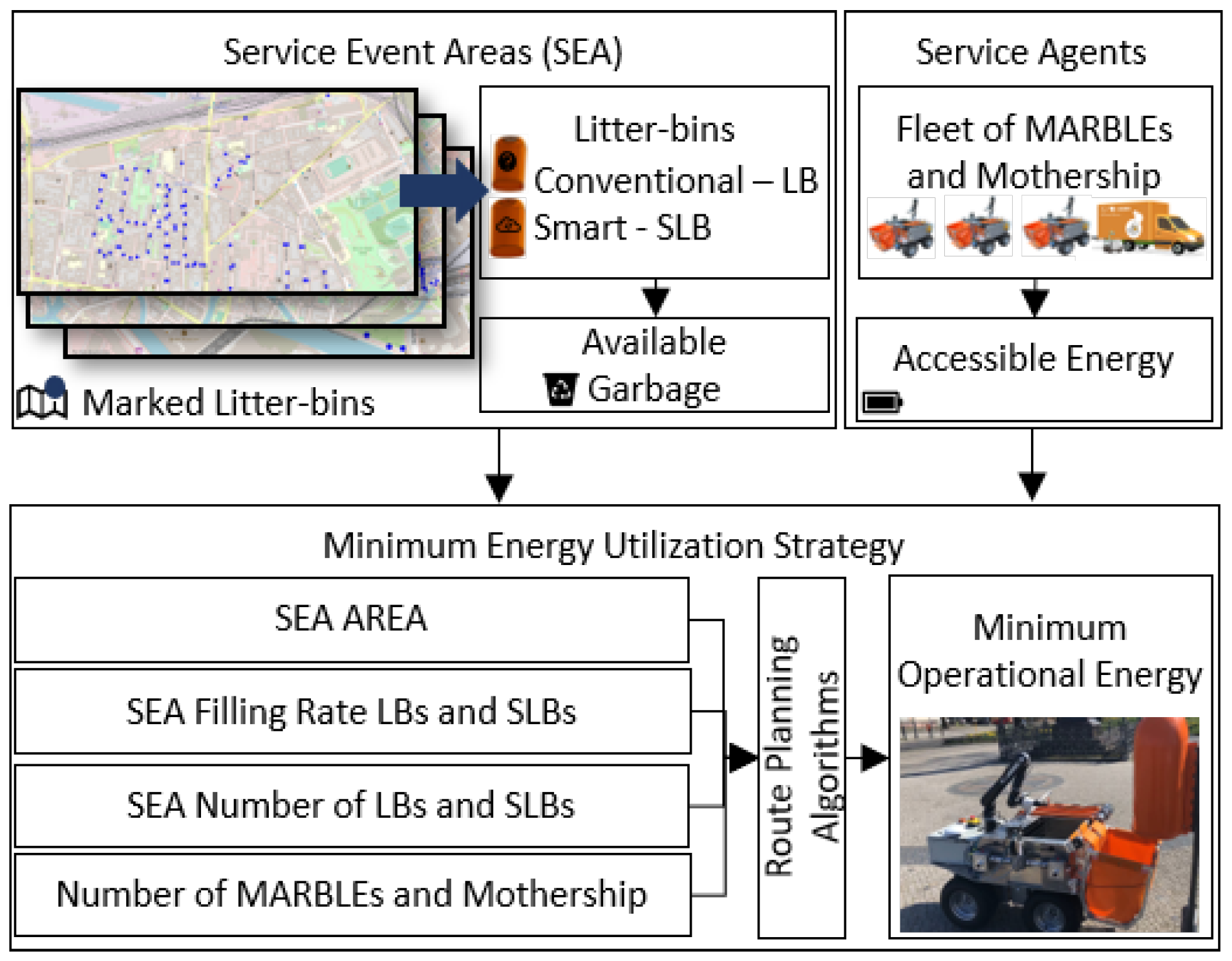
3.2. Minimum Energy Utilization Strategy for Varying Service Event Areas
3.3. Determining Algorithms for Least Energy Consumption
3.3.1. Vehicle Routing Problem with Simulated Annealing Meta-Heuristic
3.3.2. Knapsack Problem
3.3.3. Dynamic Knapsack Problem and Game Theory
| Algorithm 1: Dynamic programming knapsack problem solver |
 |
| Algorithm 2: Game theory: cooperative game |
 |
3.4. Calculating Energy Consumption
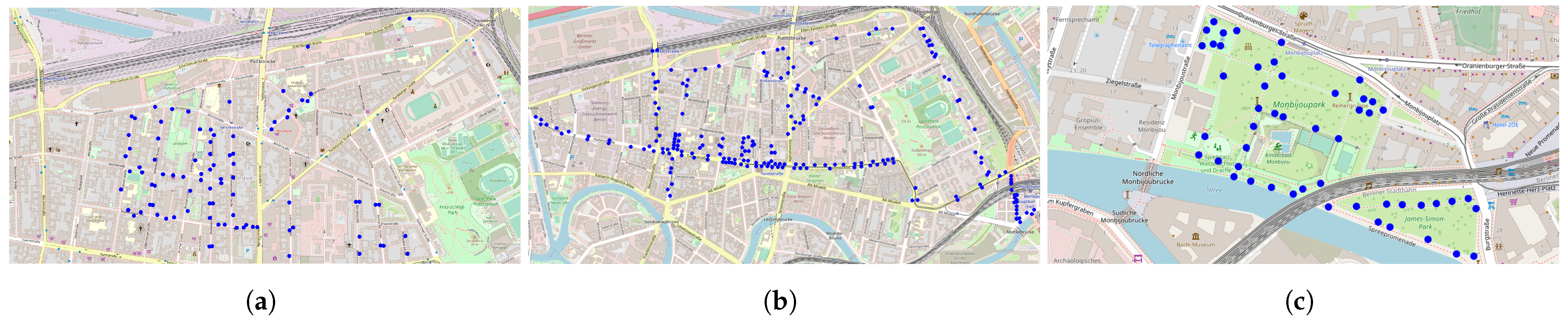
3.4.1. Service Event Area
3.4.2. Smart litter bins
4. Results
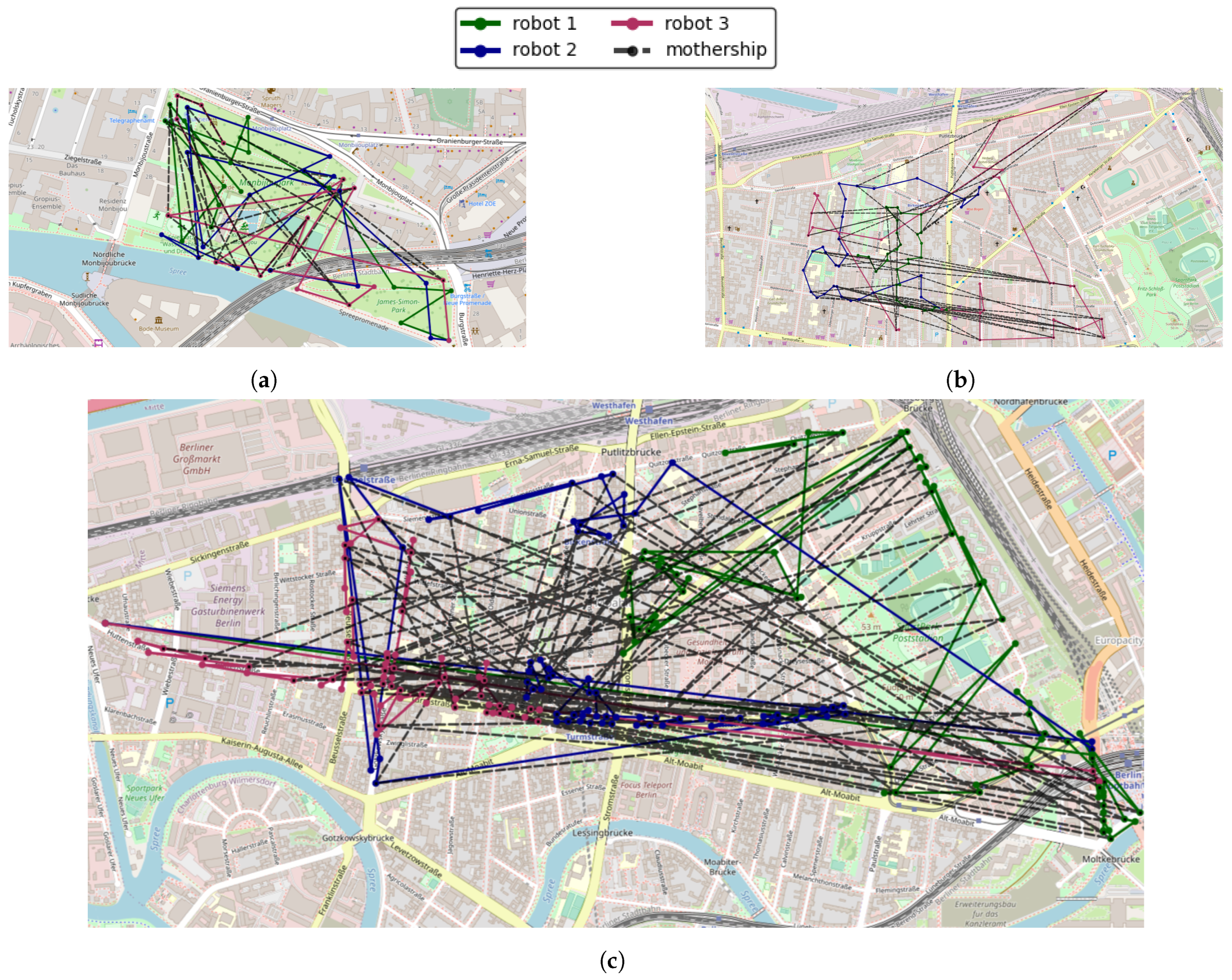
4.1. Results for Application Areas in Berlin
4.2. General Results
5. Conclusions and Outlook
Limitations and Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SEA | Service Event Area |
| MARBLE | Mobile Autonomous Robot for Litter Emptying |
| VRP | vehicle routing problem |
| VRPSA | vehicle routing problem with simulated annealing |
| KSP | knapsack problem |
| TSP | traveling salesman problem |
| LB | litter bin |
| SLB | smart litter bin |
| SDGs | Sustainable Development Goals |
| TU | Technische Universität (University of Technology) |
| LoRaWAN | Long Range Wide Area Network |
| GNSSs | global navigation satellite systems |
| UAVs | unmanned aerial vehicles |
References
- Gonzalez-Aguirre, J.A.; Osorio-Oliveros, R.; Rodríguez-Hernández, K.L.; Lizárraga-Iturralde, J.; Morales Menendez, R.; Ramírez-Mendoza, R.A.; Ramírez-Moreno, M.A.; Lozoya-Santos, J.d.J. Service robots: Trends and technology. Appl. Sci. 2021, 11, 10702. [Google Scholar] [CrossRef]
- ISO 8373; Robots and Robotic Devices—Vocabulary. Technical Report ISO 8373. ISO: Geneve, Switzerland, 2012.
- Mai, V.; Vanderborght, B.; Haidegger, T.; Khamis, A.; Bhargava, N.; Boesl, D.B.; Gabriels, K.; Jacobs, A.; Moon, A.; Murphy, R.; et al. The Role of Robotics in Achieving the United Nations Sustainable Development Goals—The Experts’ Meeting at the 2021 IEEE/RSJ IROS Workshop [Industry Activities]. IEEE Robot. Autom. Mag. 2022, 29, 92–107. [Google Scholar] [CrossRef]
- Grosinger, J. Fostering sustainable consumption through the development of proactive human-centered robot systems. In Proceedings of the IEEE IROS 2021 Workshop on the Role Robot, Achieving UN’s Sustainable Development Goals, Prague, Czech Republic, 27 September–1 October 2021; p. 1. [Google Scholar]
- Kronmueller, M.; Fielbaum, A.; Alonso-Mora, J. On-demand grocery delivery from multiple local stores with autonomous robots. In Proceedings of the 2021 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), Cambridge, UK, 4–5 November 2021; pp. 29–37. [Google Scholar]
- Roy, D.; Maitra, M.; Bhattacharya, S. Exploration of multiple unknown areas by swarm of robots utilizing virtual-region-based splitting and merging technique. IEEE Trans. Autom. Sci. Eng. 2021, 19, 3459–3470. [Google Scholar] [CrossRef]
- Causa, F.; Fasano, G.; Grassi, M. Multi-UAV path planning for autonomous missions in mixed GNSS coverage scenarios. Sensors 2018, 18, 4188. [Google Scholar] [CrossRef] [PubMed]
- Gupta, A.; van der Schoor, M.J.; Bräutigam, J.; Bladinieres Justo, V.; Umland, T.F.; Göhlich, D. Autonomous Service Robots for Urban Waste Management-Multiagent Route Planning and Cooperative Operation. IEEE Robot. Autom. Lett. 2022, 7, 8972–8979. [Google Scholar] [CrossRef]
- Poeting, M.; Schaudt, S.; Clausen, U. A comprehensive case study in last-mile delivery concepts for parcel robots. In Proceedings of the 2019 Winter Simulation Conference (WSC), National Harbor, MD, USA, 8–11 December 2019; pp. 1779–1788. [Google Scholar]
- Sembiring, N.; Sipayung, R.I. Developing multi-agent systems using agent-based and geographic information system simulation. In Proceedings of the 2020 3rd International Conference on Mechanical, Electronics, Computer, and Industrial Technology (MECnIT), Medan, Indonesia, 25–27 June 2020; pp. 114–117. [Google Scholar]
- Mahmud, M.S.A.; Abidin, M.S.Z.; Buyamin, S.; Emmanuel, A.A.; Hasan, H.S. Multi-objective route planning for underwater cleaning robot in water reservoir tank. J. Intell. Robot. Syst. 2021, 101, 1–16. [Google Scholar] [CrossRef]
- Tomitagawa, K.; Anuntachai, A.; Chotipant, S.; Wongwirat, O.; Kuchii, S. Performance Measurement of Energy Optimal Path Finding for Waste Collection Robot Using ACO Algorithm. IEEE Access 2022, 10, 117261–117272. [Google Scholar] [CrossRef]
- Ahmad, S.; Jamil, F.; Iqbal, N.; Kim, D. Optimal route recommendation for waste carrier vehicles for efficient waste collection: A step forward towards sustainable cities. IEEE Access 2020, 8, 77875–77887. [Google Scholar] [CrossRef]
- Ghahramani, M.; Zhou, M.; Molter, A.; Pilla, F. IoT-based route recommendation for an intelligent waste management system. IEEE Internet Things J. 2021, 9, 11883–11892. [Google Scholar] [CrossRef]
- Bräutigam, J.; Gupta, A.; Göhlich, D. Simulated Annealing-based Energy Efficient Route Planning for Urban Service Robots. In Proceedings of the 2022 26th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 22–25 August 2022; pp. 294–299. [Google Scholar]
- Gupta, A.; Kremer, P.; Park, S.; Göhlich, D. Intelligent route planning for autonomous service robots using communicating smart dustbins. In Proceedings of the ICC 2022-IEEE International Conference on Communications, Gangnam-gu, Republic of Korea, 16–20 May 2022; pp. 1202–1207. [Google Scholar]
- Borradaile, G.; Heeringa, B.; Wilfong, G. The 1-neighbour knapsack problem. In Proceedings of the International Workshop on Combinatorial Algorithms, Victoria, BC, Canada, 20–22 July 2011; pp. 71–84. [Google Scholar]
- Nicosia, G.; Pacifici, A.; Pferschy, U. On Multi-Agent Knapsack Problems. In Proceedings of the CTW, Paris, France, 2–4 June 2009; pp. 44–47. [Google Scholar]
- Shrestha, P.; Joshi, B. Multi-agent based heterogeneous power management system. Int. J. Innov. Comput. Inf. Control 2021, 17, 245–257. [Google Scholar]
- Dönmez, E.; Kocamaz, A.F. Multi target task distribution and path planning for multi-agents. In Proceedings of the 2018 International Conference on Artificial Intelligence and Data Processing (IDAP), Malatya, Turkey, 28–30 September 2018; pp. 1–7. [Google Scholar]
- Htiouech, S.; Alzaidi, A. Smart agents for the multidimensional multi-choice knapsack problem. Int. J. Comput. Appl. 2017, 174, 5–9. [Google Scholar] [CrossRef]
- Arribillaga, R.P.; Bergantiños, G. Cooperative and axiomatic approaches to the knapsack allocation problem. Ann. Oper. Res. 2021, 318, 805–830. [Google Scholar] [CrossRef]
- Wong, K.K.L. Bridging game theory and the knapsack problem: A theoretical formulation. J. Eng. Math. 2015, 91, 177–192. [Google Scholar] [CrossRef]
- Benabbou, N.; Perny, P. Solving multi-agent knapsack problems using incremental approval voting. In Proceedings of the Twenty-second European Conference on Artificial Intelligence, Amsterdam, The Netherlands, 29 August–2 September 2016; pp. 1318–1326. [Google Scholar]
- Lau, H.C.; Zhang, L. Task allocation via multi-agent coalition formation: Taxonomy, algorithms and complexity. In Proceedings of the 15th IEEE International Conference on Tools with Artificial Intelligence, Sacramento, CA, USA, 3–5 November 2003; pp. 346–350. [Google Scholar] [CrossRef]
- Noorizadegan, M.; Chen, B. Vehicle routing with probabilistic capacity constraints. Eur. J. Oper. Res. 2018, 270, 544–555. [Google Scholar] [CrossRef]
- Göhlich, D.; Syré, A.M.; van der Schoor, M.J.; Jefferies, D.; Grahle, A.; Heide, L. Design Methodologies for Sustainable Mobility Systems. In Design Methodology for Future Products; Krause, D., Heyden, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2022; pp. 123–144. [Google Scholar] [CrossRef]
- SEMTECH. What Is LoRa. Available online: https://www.semtech.com/lora/what-is-lora (accessed on 13 February 2023).
- Serrano, R. Cooperative games. In Complex Social and Behavioral Systems: Game Theory and Agent-Based Models; Springer: Berlin/Heidelberg, Germany, 2020; pp. 49–60. [Google Scholar]
- Reinhelt, G. TSPLIB: A Library of Sample Instances for the TSP (and Related Problems) from Various Sources and of Various Types. 2014. Available online: http://comopt.ifi.uniheidelberg.de/software/TSPLIB95 (accessed on 18 October 2023).
- Ai, T.J.; Kachitvichyanukul, V. A particle swarm optimization for the vehicle routing problem with simultaneous pickup and delivery. Comput. Oper. Res. 2009, 36, 1693–1702. [Google Scholar] [CrossRef]
- Patel, D.; Kulkarni, A.; Udar, H.; Sharma, S. Smart Dustbins for Smart Cities. Int. J. Trend Sci. Res. Dev. 2019, 3, 1828–1831. [Google Scholar] [CrossRef]
- Mokhtari, K.; Ayub, A.; Surendran, V.; Wagner, A.R. Pedestrian density based path recognition and risk prediction for autonomous vehicles. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 517–524. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Area | Num. LB | Fill Rate | Alg. | Energy | Computation Time |
|---|---|---|---|---|---|---|
| km | kWh | s | ||||
| I | 4.2 | 0.13 | ||||
| Monbijoupark | 0.1 | 51 | 30 | II | 4.6 | 0.15 |
| III | 4.6 | 8.92 | ||||
| I | 18.9 | 0.45 | ||||
| Moabit87 | 1.7 | 87 | 30 | II | 17.4 | 0.52 |
| III | 12.9 | 13.45 | ||||
| I | 99.0 | 4.98 | ||||
| Moabit214 | 5.5 | 214 | 30 | II | 84.1 | 5.47 |
| III | 82.0 | 24.31 |
| Algorithm | Area A | Num. LB | Fill Rate |
|---|---|---|---|
| km | % | ||
| I | |||
| II | |||
| III |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Justo, V.B.; Gupta, A.; Umland, T.F.; Göhlich, D. Minimum Energy Utilization Strategy for Fleet of Autonomous Robots in Urban Waste Management. Robotics 2023, 12, 159. https://doi.org/10.3390/robotics12060159
Justo VB, Gupta A, Umland TF, Göhlich D. Minimum Energy Utilization Strategy for Fleet of Autonomous Robots in Urban Waste Management. Robotics. 2023; 12(6):159. https://doi.org/10.3390/robotics12060159
Chicago/Turabian StyleJusto, Valeria Bladinieres, Abhishek Gupta, Tobias Fritz Umland, and Dietmar Göhlich. 2023. "Minimum Energy Utilization Strategy for Fleet of Autonomous Robots in Urban Waste Management" Robotics 12, no. 6: 159. https://doi.org/10.3390/robotics12060159