

Research Perspectives in Collaborative Assembly: A Review
 , , ,
, , ,
Abstract
:1. Introduction
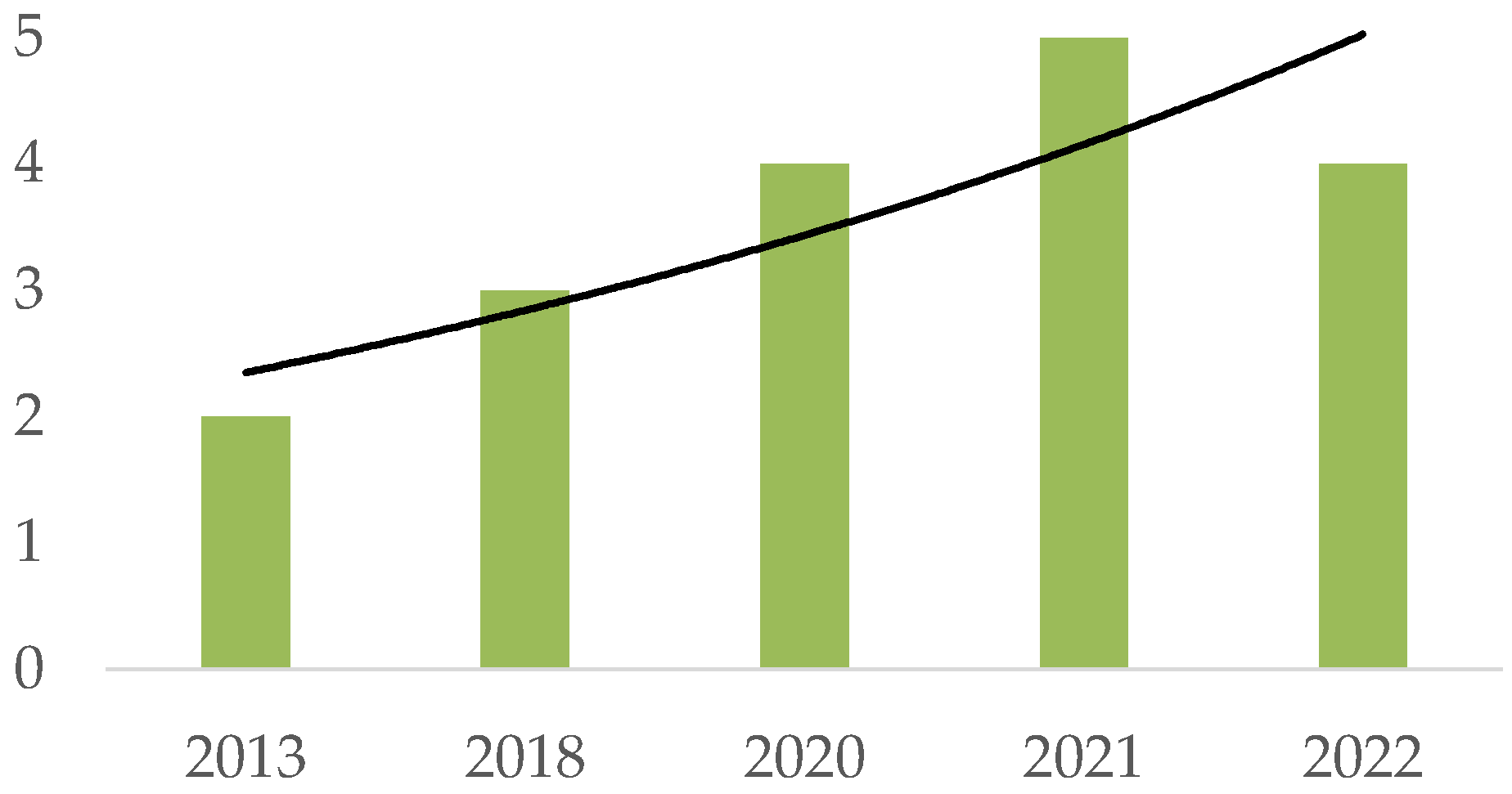
- RQ1: How have publications on HRC in assembly evolved in recent years?
- RQ2: What are the main research themes addressed in the scientific literature concerning the successful implementation of collaborative assembly robots in manufacturing?
- RQ3: What are the research perspectives and emerging challenges for human-centered collaborative assembly in industry?
2. Materials and Methods
2.1. Research Objectives
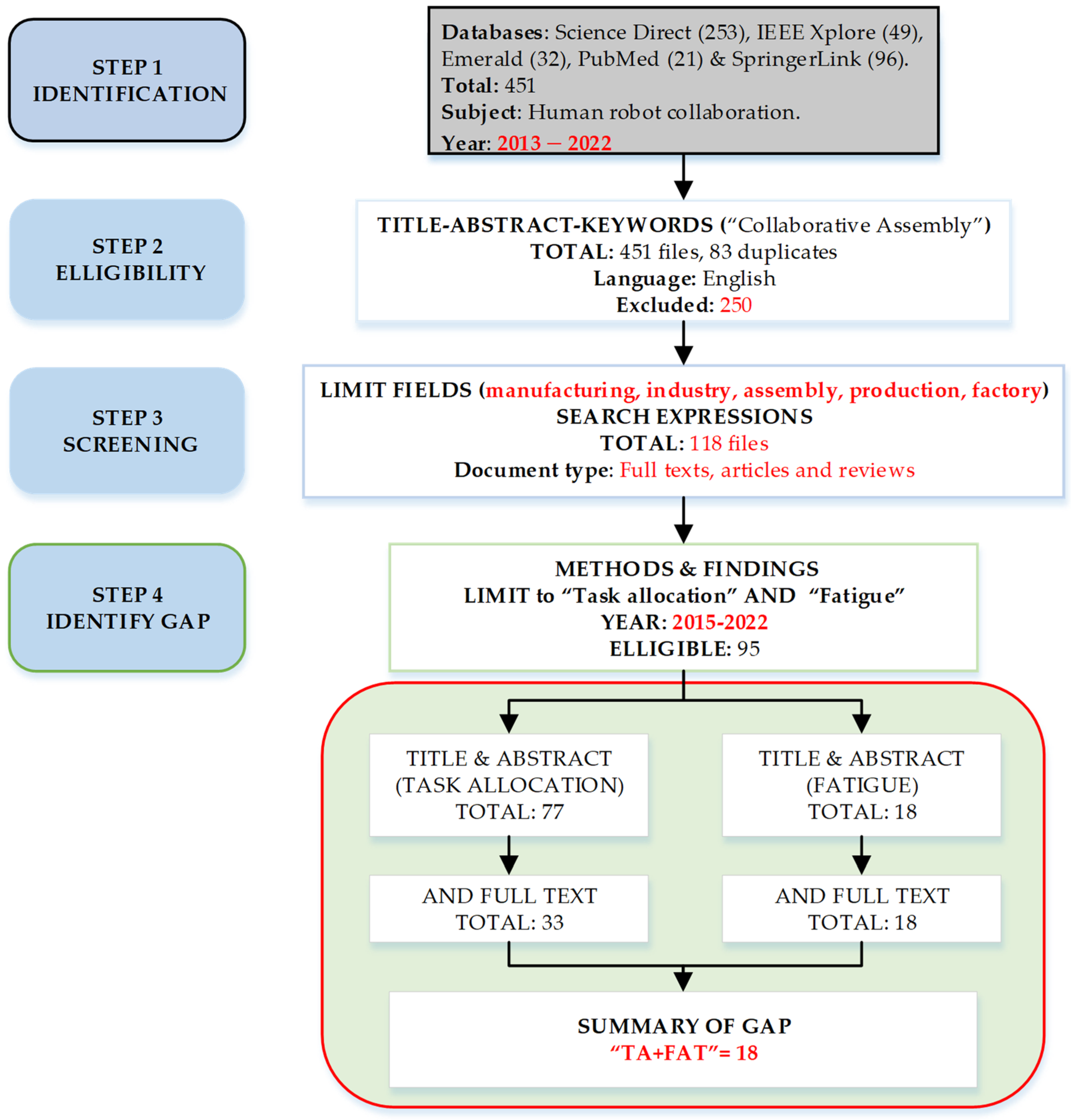
- Step 1: Define the research objectives of the review.
- Step 2: Establish the research field (inclusion) of the review.
- Step 3: Screen the title, abstract and full text.
- Step 4: Report on the reduced data, generate categories and summarize the validation process of the literature review.

2.2. The Research Fields of the Review
2.3. Screening
2.4. Validation of the Review Method
3. Enabling Technologies in Collaborative Assembly
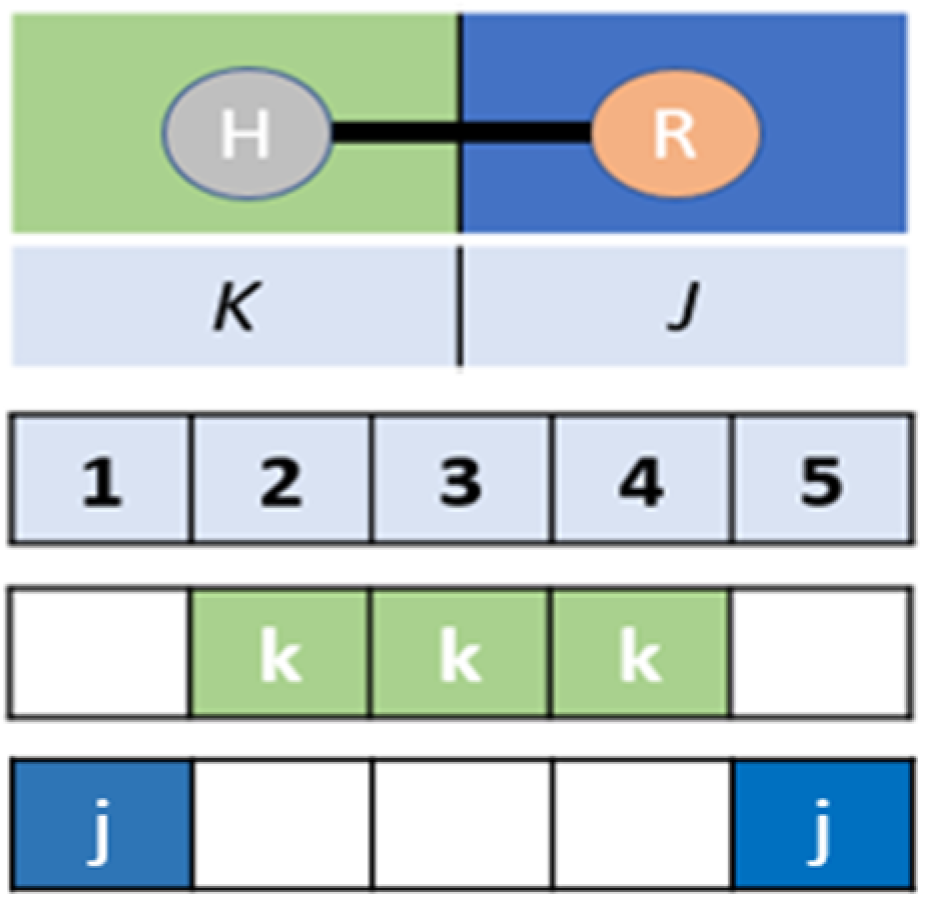
3.1. Task Allocation
3.2. Ergonomics in Collaborative Assembly
3.2.1. Ergonomics and Fatigue
3.2.2. Safety
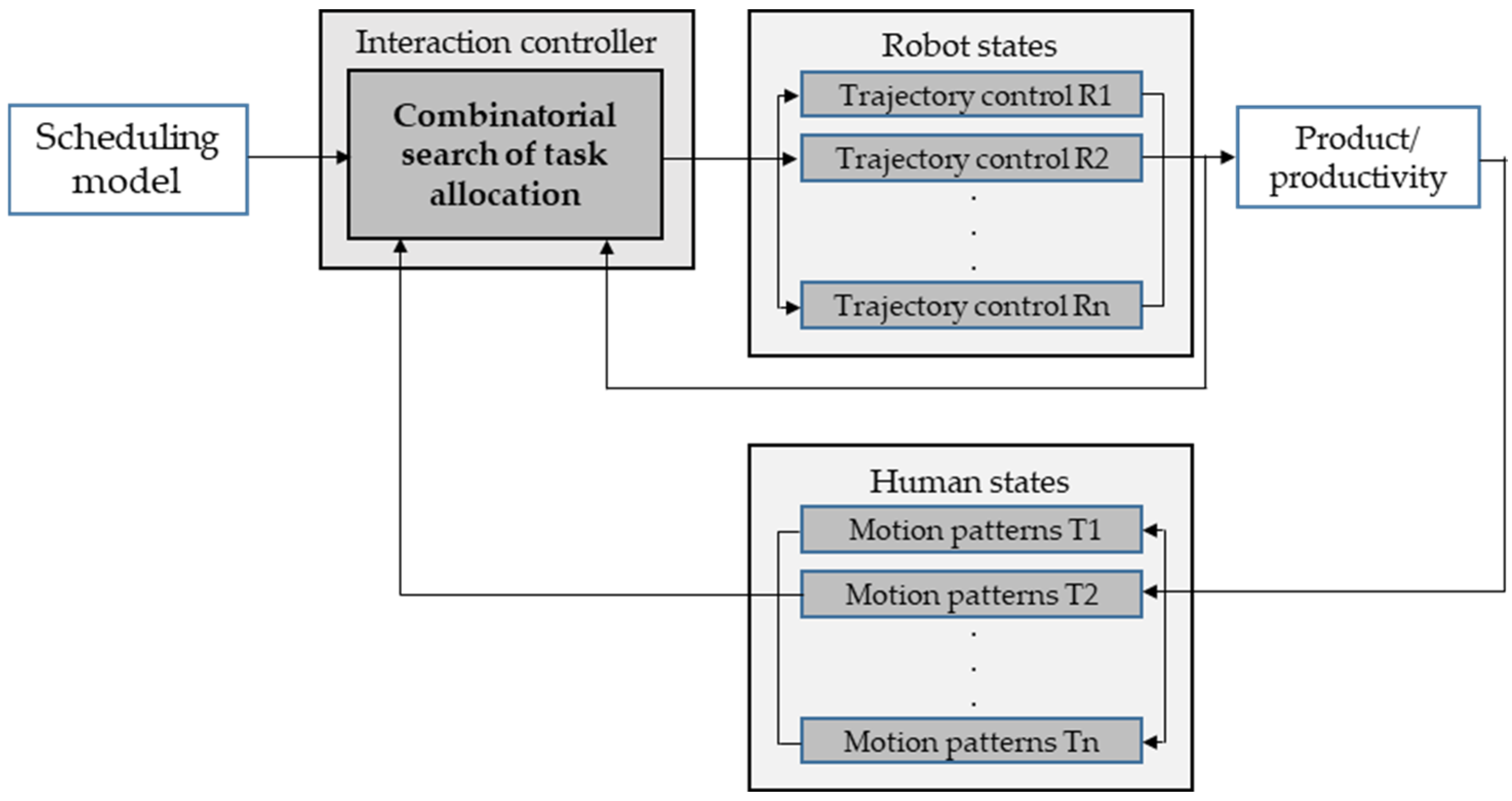
3.3. Intelligent Controllers
3.3.1. Prediction
3.3.2. Action Planning and Motion Control
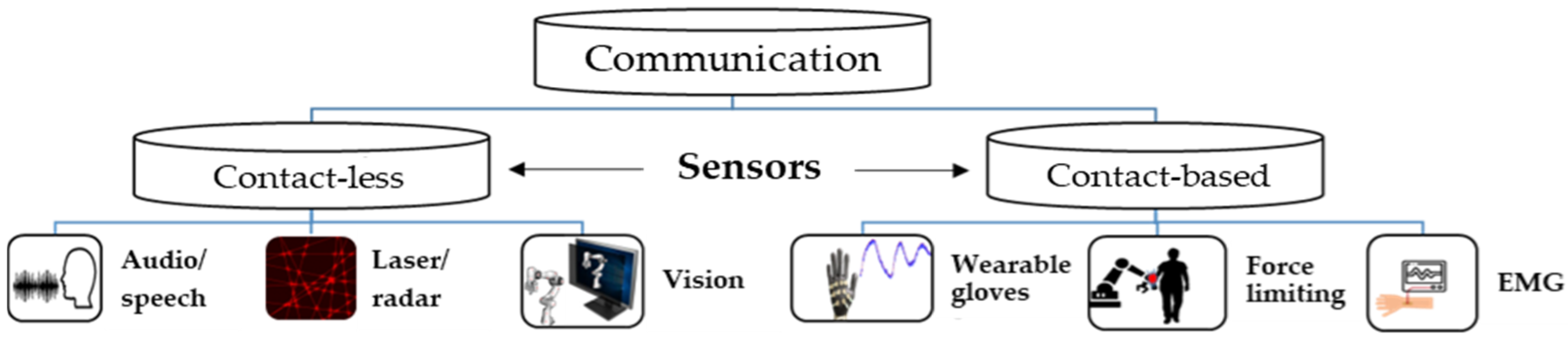
3.3.3. Recognition and Communication
3.4. Optimization Techniques

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Ref. | Description/Title | ALBP | AD | MM | OT | Key Feature |
|---|---|---|---|---|---|---|---|
| 2018 | [25] | Robot adaptation to human physical fatigue in human–robot co-manipulation | ✔ | DMP | Proposes a new human fatigue model in HRC based on the measurement of EMG signals. | ||
| 2019 | [55] | Sequence Planning Considering Human Fatigue for Human–Robot Collaboration in Disassembly | ✔ | ✔ | ✔ | DBA | Solved the sequence planning considering human fatigue in human–robot collaboration using a bee algorithm. |
| 2019 | [31] | A selective muscle fatigue management approach to ergonomic human–robot co-manipulation | ✔ | ML | Performed experiments on two different HRC tasks to estimate individual muscle forces to learn the relationship between the given configuration and endpoint force inputs and muscle force outputs. | ||
| 2020 | [100] | Mathematical model and bee algorithms for the mixed-model assembly line balancing problem with physical human–robot collaboration | ✔ | ✔ | ✔ | MILP BA ABC | The authors presented a mixed-model assembly line balancing problem using a combination of MILP, BA and ABC algorithms. To this end, the proposed model and algorithm offer a new line design for increasing the assembly line efficiency. |
| 2020 | [101] | Bound-guided hybrid estimation of the distribution algorithm for energy-efficient robotic assembly line balancing | ✔ | ✔ | ✔ | BGS | The authors proposed a bounded guided sampling method as a multi-objective mathematical model for solving the problem of the energy efficiency of robotic assembly line balancing. |
| 2020 | [97] | Scheduling of human–robot collaboration in the assembly of printed circuit boards: a constraint programming approach | ✔ | ✔ | ✔ | MILP CP | A comparison between MILP and CP reveals that CP offers a superior computational performance for ALBP, comprising between 60 and 200 task. |
| 2020 | [22] | Balancing of assembly lines with collaborative robots | ✔ | ✔ | ✔ | MILP GA | The authors developed a genetic algorithm to minimize the assembly lines’ cycle times for a given number of stations with collaborative robots. |
| 2021 | [61] | Balancing collaborative human–robot assembly lines to optimize the cycle time and ergonomic risk | ✔ | ✔ | ✔ | MILP CP BD | Human–robot collaboration was studied for sensitivity analysis. MILP, CP and BD algorithms were developed to analyze the benefits of human–robot collaboration in assembly lines. To this end, regression lines can help managers determine how many robots should be used for a line. |
| 2022 | [26] | A reinforcement learning method for human–robot collaboration in assembly tasks | ✔ | ✔ | ✔ | RL | The use of reinforcement learning to optimize the task sequence allocation in the HRC assembly process. A visual interface displays the assembly sequence to the operators to obey the decision of the human agent. |
| 2022 | [13] | A dynamic task allocation strategy for mitigating the human physical fatigue in collaborative robotics | ✔ | ✔ | ✔ | DNN | A non-intrusive online fatigue algorithm that predicts the joint muscle activation associated with the human motion. The estimation process allocates the task activities based on a sophisticated musculoskeletal model and a 3D vison system that tracks the human motion in real time. |
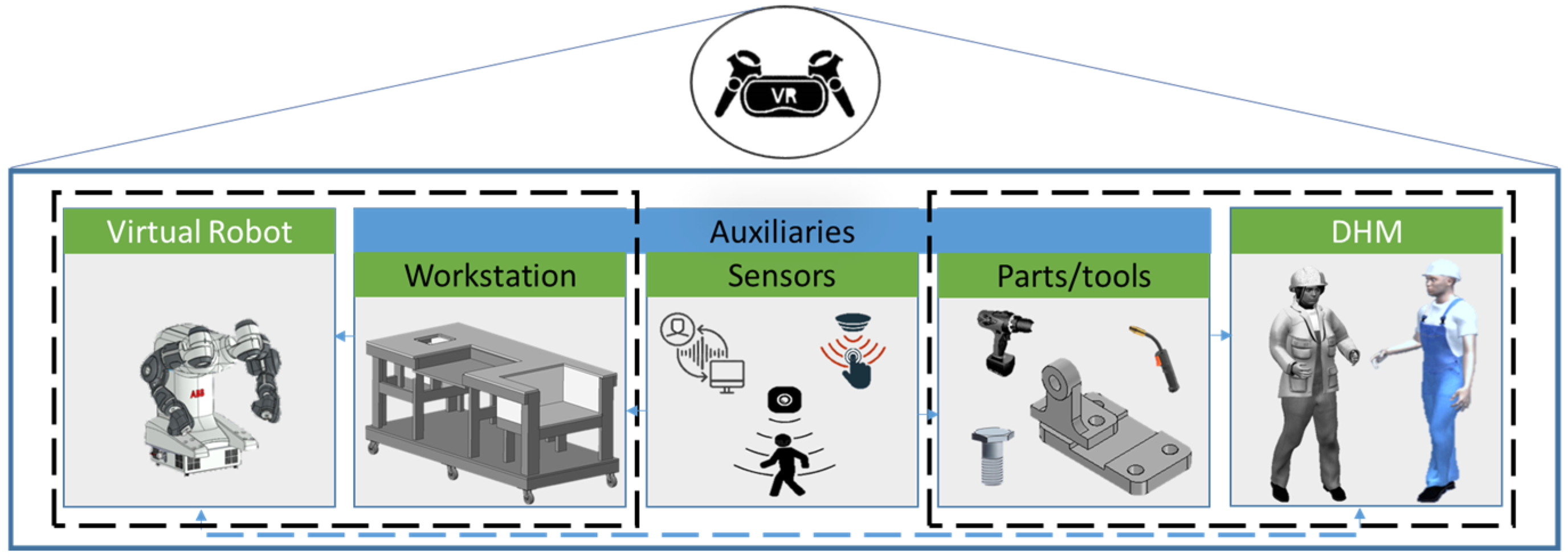
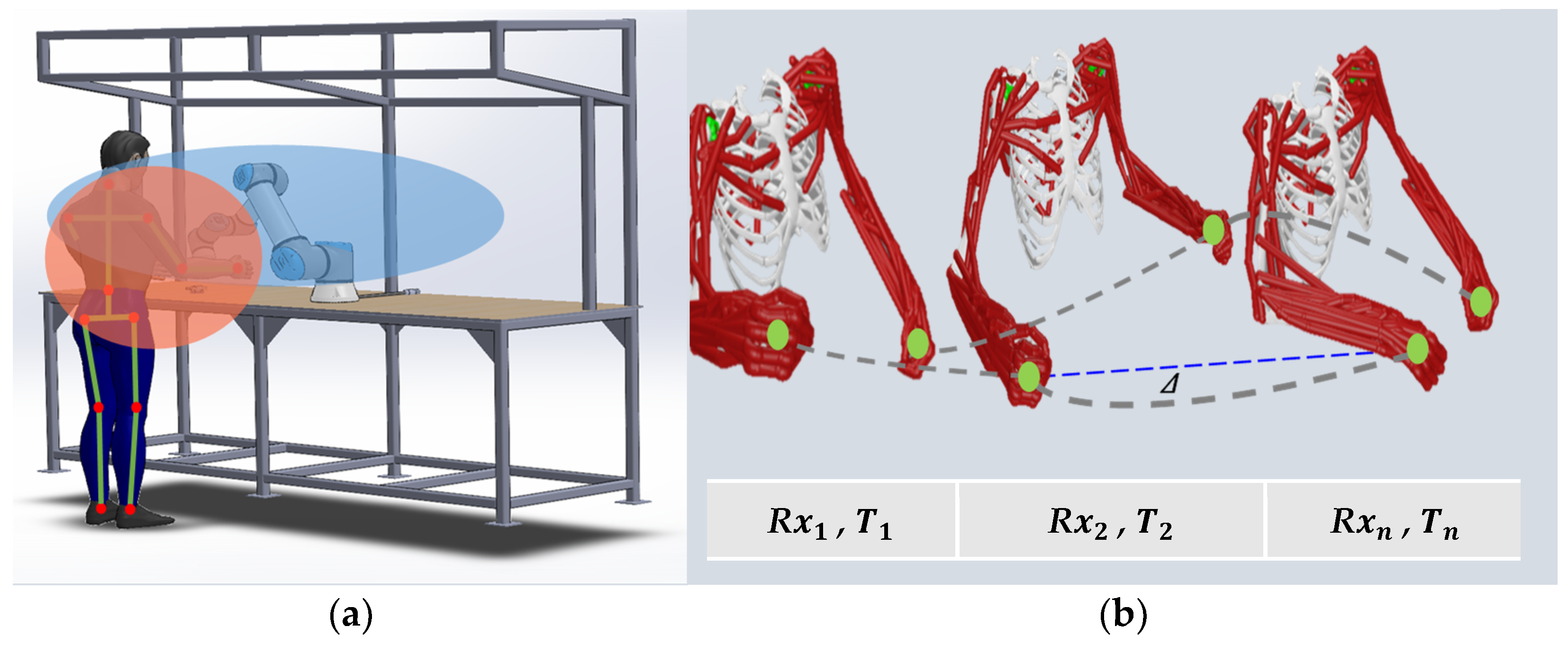
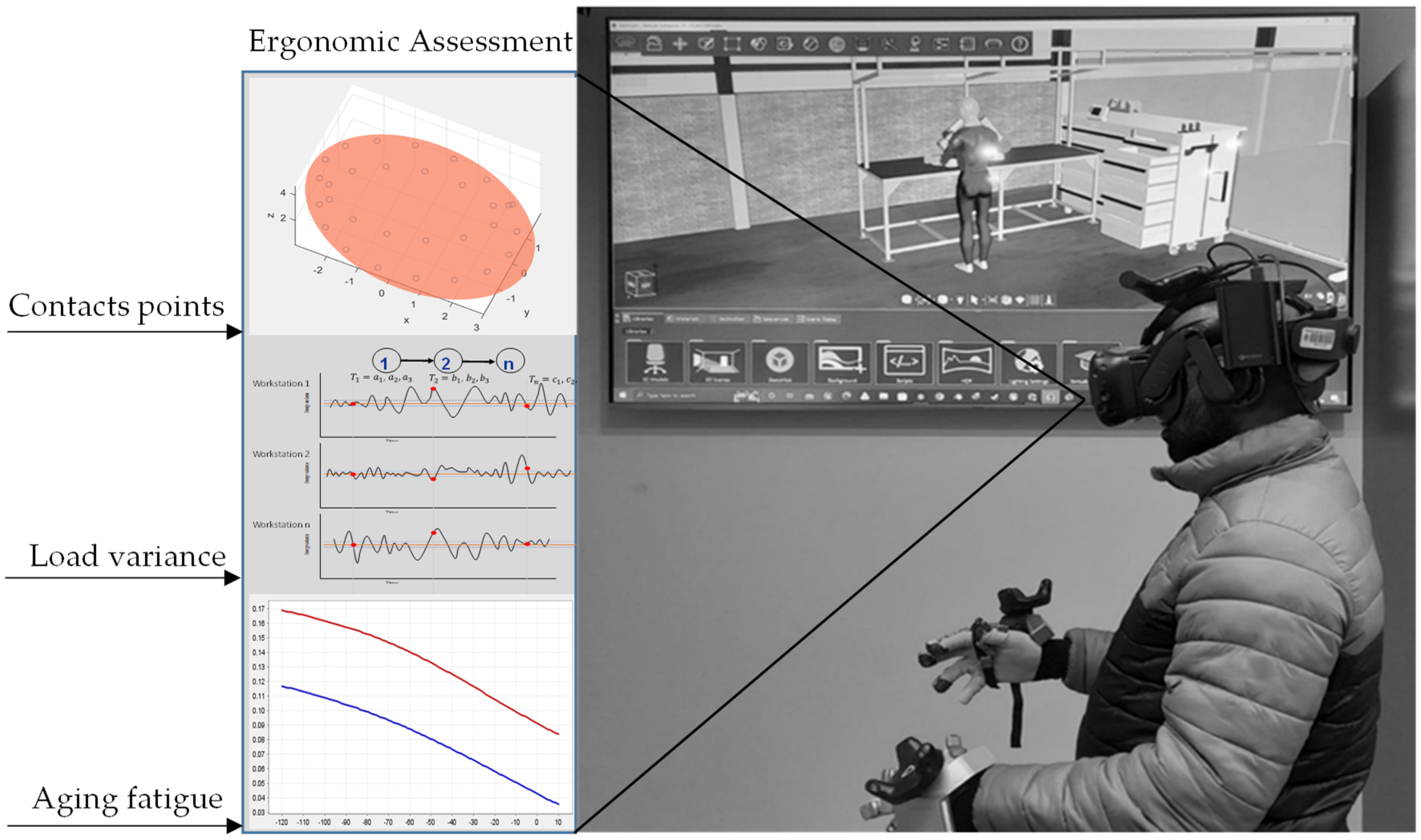
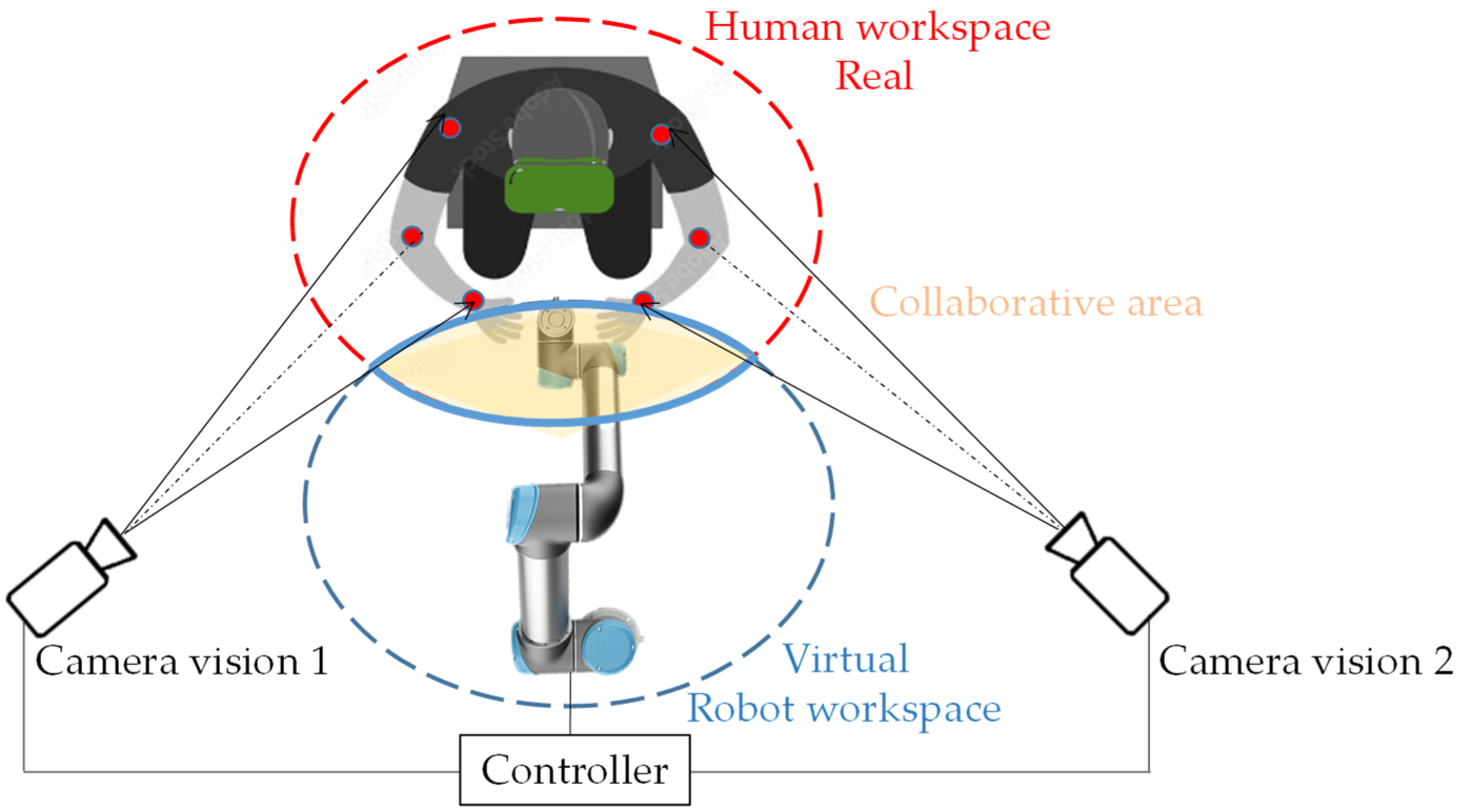
| 2022 | [12] | Development of an integrated virtual reality system with wearable sensors for the ergonomic evaluation of human–robot cooperative workplaces | ✔ | Ergonomic analysis strategy of humans in the loop virtual reality technology. The system uses a mixed- prototyping strategy involving a VR environment, computer–aided design (CAD) objects, wearable sensors and human subjects. |
3.5. Digital Interface
4. Analysis of Results
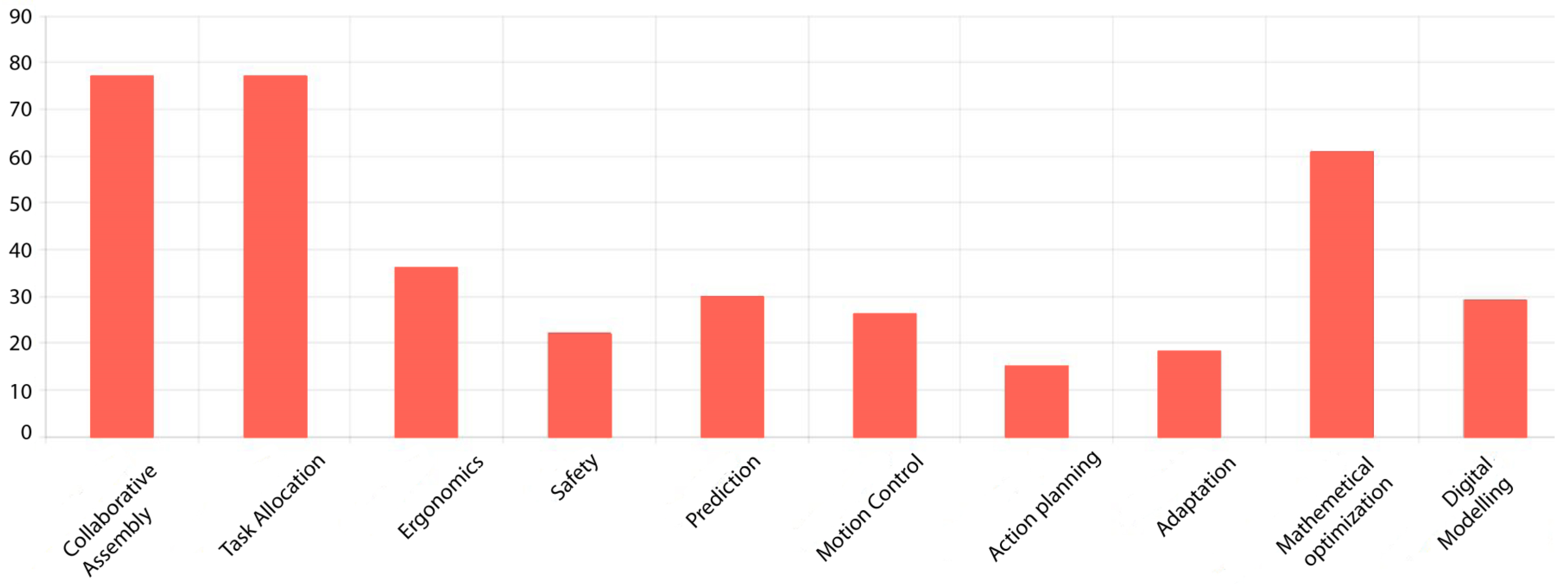
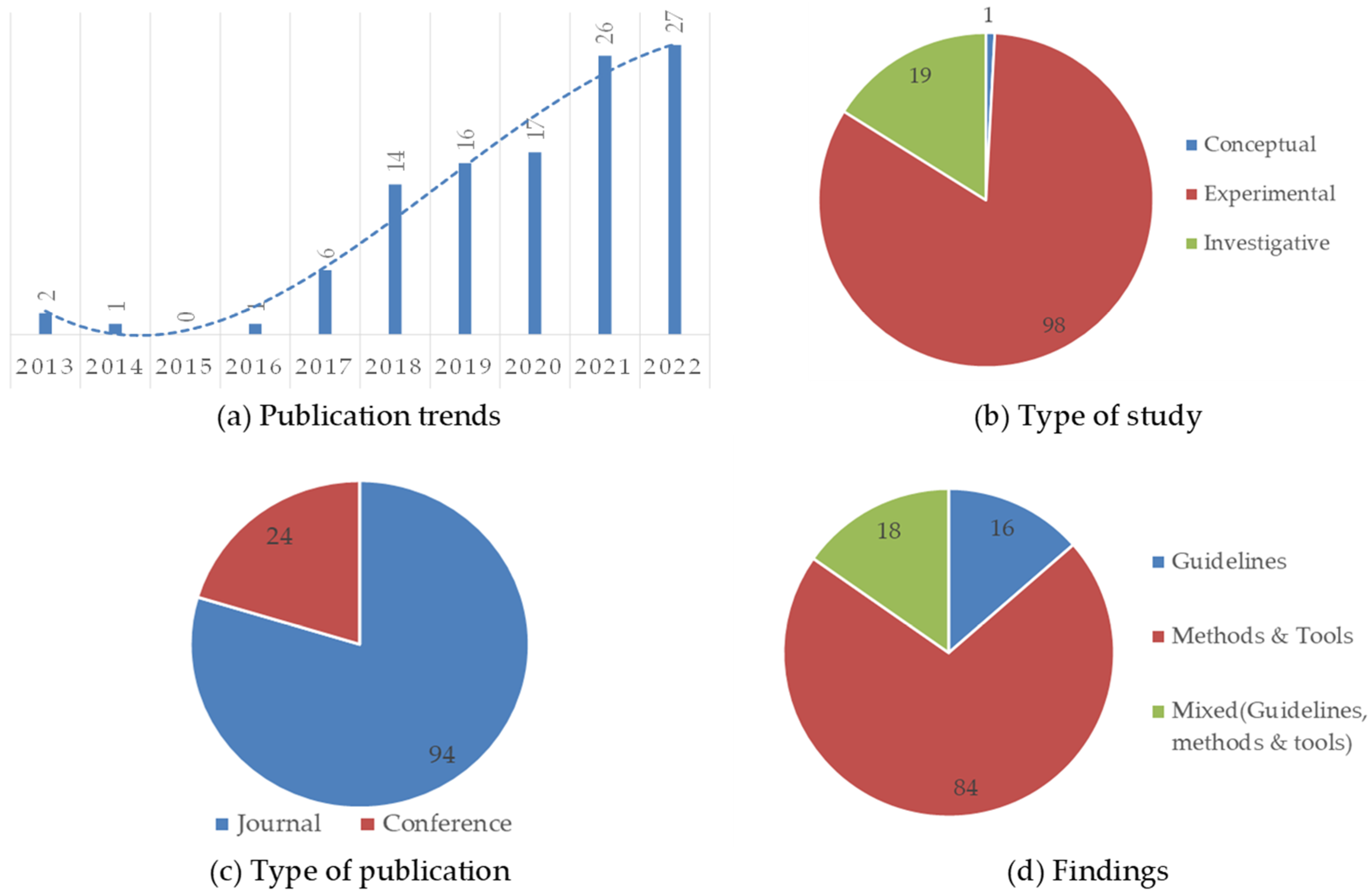
4.1. Descriptive Results
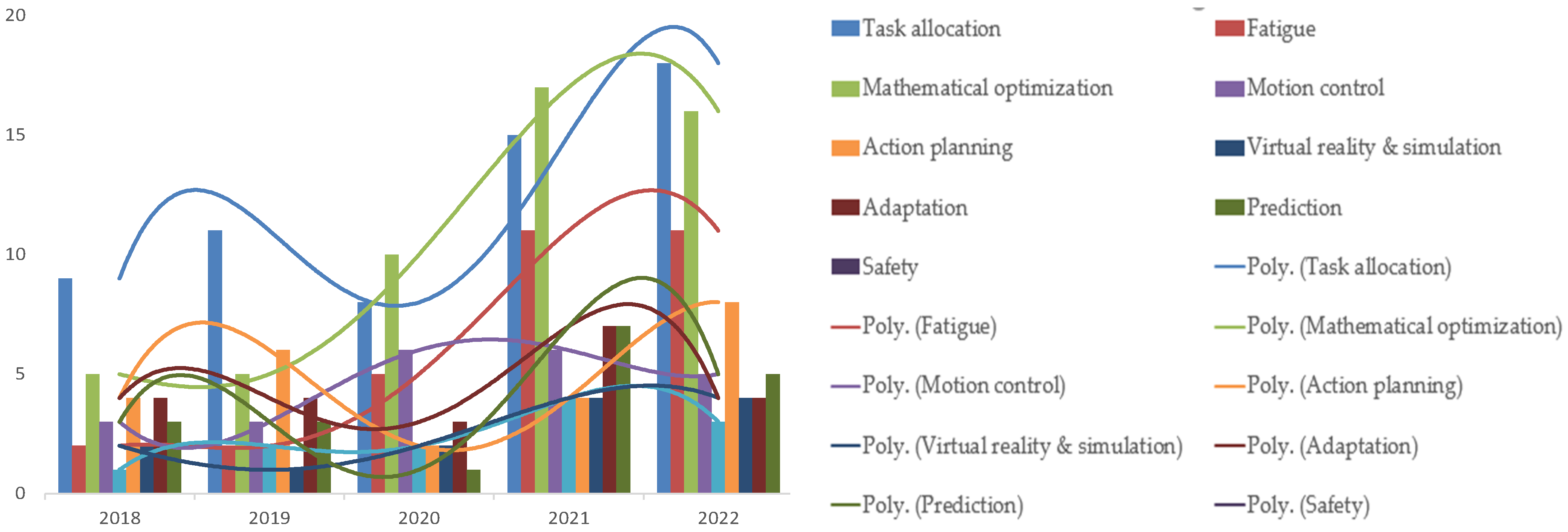
4.2. Research Trends in Collaborative Assembly
4.3. Task Allocation and Fatigue Management Clusters
5. Discussions and Outlook
- The design of collaborative assembly solutions that focus on the advancement of adaptive and non-intrusive task scheduling methodologies. Such control methods should enable a reduction in the human workload during the work cycle, according to the operator’s physical conditions and performance.
- Human safety is paramount in collaborative assembly. Notwithstanding physical safety as the most important requirement for human–robot collaboration, sustainable human–robot collaboration must be able to monitor and interpret the human states. Therefore, the collaborative systems must be able to generate and interpret a substantial amount of real-time data about the operator’s psychophysical conditions.
- Numerous communication techniques between the robot and the human are reported in the literature. Impedance for gesture control, voice command and haptics have been proven useful for the robotic control of specific task execution. However, these communication methods are subjects to noise and interruptions. Better work ergonomics can be achieved through real-time multi-modal communication for context-aware HRC. The multiplicity of signaling modalities is characteristic of a natural interaction between multiple assembly agents.
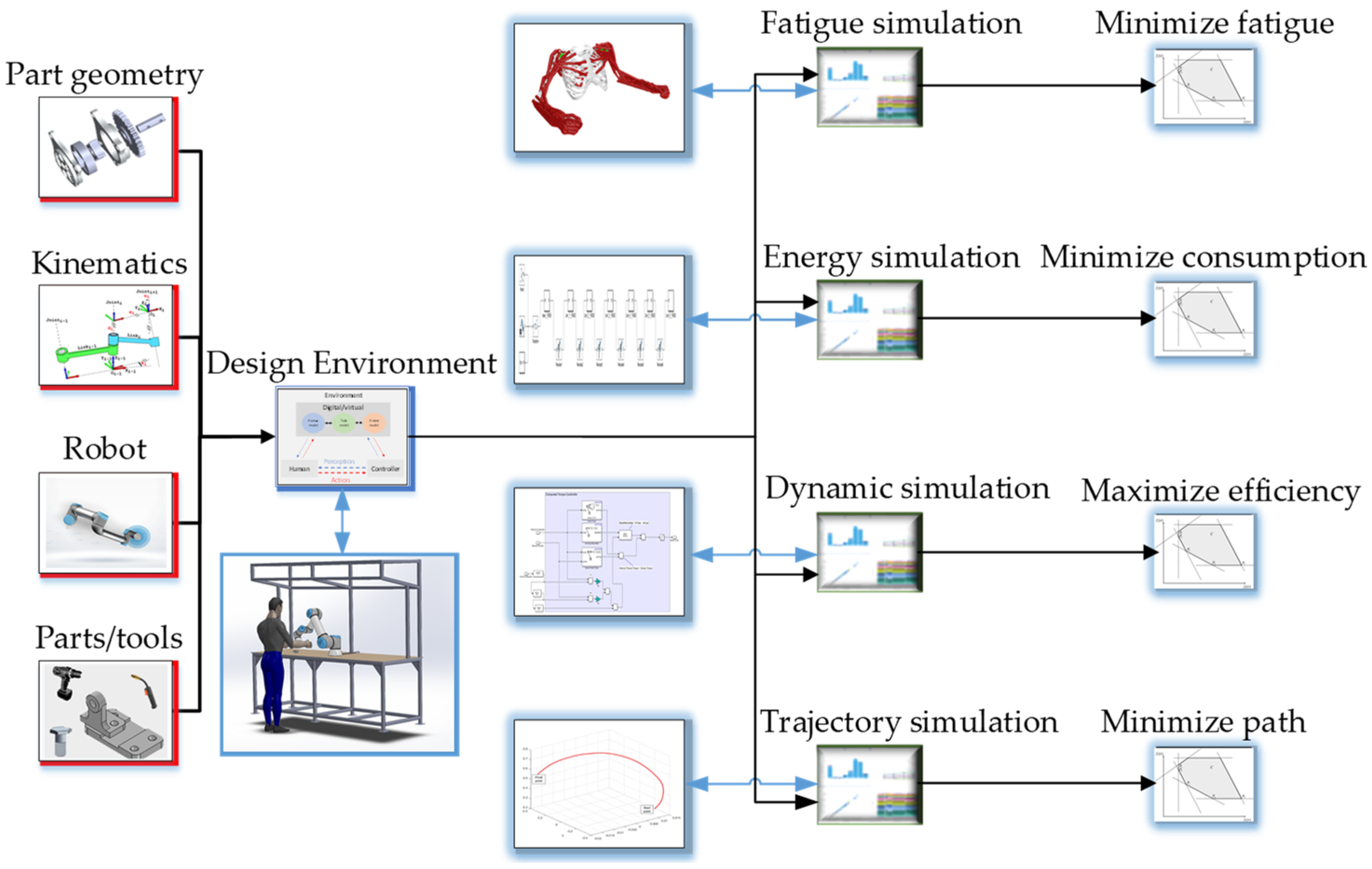
- With the advancements in data integration and simulation analytics, the consideration of fatigue management in intuitive human–robot collaborative tasks can accelerate the development of an interface for high-level hybrid collaboration. Future research can envision the virtual integration of hybrid assembly process planning with fatigue analysis tools. Sensor-less methodologies such as digital twins can improve the prediction accuracy of the energy degradation and enable the visualization of the requirements for tasks execution and workload balance at the early design stage.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Park, C.Y.; Laskey, K.B.; Salim, S.; Lee, J.Y. Predictive situation awareness model for smart manufacturing. In Proceedings of the 2017 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Cimini, C.; Pirola, F.; Pinto, R.; Cavalieri, S. A human-in-the-loop manufacturing control architecture for the next generation of production systems. J. Manuf. Syst. 2020, 54, 258–271. [Google Scholar] [CrossRef]
- Gil, M.; Albert, M.; Fons, J.; Pelechano, V. Engineering human-in-the-loop interactions in cyber-physical systems. Inf. Softw. Technol. 2020, 126, 106349. [Google Scholar] [CrossRef]
- Gualtieri, L.; Rauch, E.; Vidoni, R. Emerging research fields in safety and ergonomics in industrial collaborative robotics: A systematic literature review. Robot. Comput.-Integr. Manuf. 2021, 67, 101998. [Google Scholar] [CrossRef]
- Wang, L.; Gao, R.; Váncza, J.; Krüger, J.; Wang, X.V.; Makris, S.; Chryssolouris, G. Symbiotic human-robot collaborative assembly. CIRP Ann. 2019, 68, 701–726. [Google Scholar] [CrossRef] [Green Version]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and prospects of the human–robot collaboration. Auton. Robot. 2018, 42, 957–975. [Google Scholar] [CrossRef] [Green Version]
- Gervasi, R.; Mastrogiacomo, L.; Franceschini, F. A conceptual framework to evaluate human-robot collaboration. Int. J. Adv. Manuf. Technol. 2020, 108, 841–865. [Google Scholar] [CrossRef]
- Malik, A.A.; Bilberg, A. Collaborative robots in assembly: A practical approach for tasks distribution. Procedia CIRP 2019, 81, 665–670. [Google Scholar] [CrossRef]
- Teiwes, J.; Bänziger, T.; Kunz, A.; Wegener, K. Identifying the potential of human-robot collaboration in automotive assembly lines using a standardised work description. In Proceedings of the 2016 22nd International Conference on Automation and Computing (ICAC), Colchester, UK, 7–8 September 2016; IEEE: Piscataway, NJ, USA. [Google Scholar]
- Smith, T.; Benardos, P.; Branson, D. Assessing worker performance using dynamic cost functions in human robot collaborative tasks. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 289–301. [Google Scholar] [CrossRef]
- Ciccarelli, M.; Papetti, A.; Cappelletti, F.; Brunzini, A.; Germani, M. Combining World Class Manufacturing system and Industry 4.0 technologies to design ergonomic manufacturing equipment. Int. J. Interact. Des. Manuf. 2022, 16, 263–279. [Google Scholar] [CrossRef]
- Caporaso, T.; Grazioso, S.; Di Gironimo, G. Development of an integrated virtual reality system with wearable sensors for ergonomic evaluation of human–robot cooperative workplaces. Sensors 2022, 22, 2413. [Google Scholar] [CrossRef]
- Messeri, C.; Bicchi, A.; Zanchettin, A.M.; Rocco, P. A Dynamic Task Allocation Strategy to Mitigate the Human Physical Fatigue in Collaborative Robotics. IEEE Robot. Autom. Lett. 2022, 7, 2178–2185. [Google Scholar] [CrossRef]
- Ciccarelli, M.; Papetti, A.; Scoccia, C.; Menchi, G.; Mostarda, L.; Palmieri, G.; Germani, M. A system to improve the physical ergonomics in Human-Robot Collaboration. Procedia Comput. Sci. 2022, 200, 689–698. [Google Scholar] [CrossRef]
- Abdous, M.-A.; Delorme, X.; Battini, D.; Sgarbossa, F.; Berger-Douce, S. Assembly Line Balancing Problem with ergonomics: A new fatigue and recovery model. Int. J. Prod. Res. 2022, 61, 693–706. [Google Scholar] [CrossRef]
- Mura, M.D.; Dini, G. Job rotation and human–robot collaboration for enhancing ergonomics in assembly lines by a genetic algorithm. Int. J. Adv. Manuf. Technol. 2021, 118, 2901–2914. [Google Scholar] [CrossRef]
- Kolbeinsson, A.; Lagerstedt, E.; Lindblom, J. Foundation for a classification of collaboration levels for human-robot cooperation in manufacturing. Prod. Manuf. Res. 2019, 7, 448–471. [Google Scholar] [CrossRef] [Green Version]
- Inkulu, A.K.; Bahubalendruni, M.R.; Dara, A.; SankaranarayanaSamy, K. Challenges and opportunities in human robot collaboration context of Industry 4.0-a state of the art review. Ind. Robot. Int. J. Robot. Res. Appl. 2022, 49, 226–239. [Google Scholar] [CrossRef]
- Papanastasiou, S.; Kousi, N.; Karagiannis, P.; Gkournelos, C.; Papavasileiou, A.; Dimoulas, K.; Baris, K.; Koukas, S.; Michalos, G.; Makris, S. Towards seamless human robot collaboration: Integrating multimodal interaction. Int. J. Adv. Manuf. Technol. 2019, 105, 3881–3897. [Google Scholar] [CrossRef]
- Bruno, G.; Antonelli, D. Dynamic task classification and assignment for the management of human-robot collaborative teams in workcells. Int. J. Adv. Manuf. Technol. 2018, 98, 2415–2427. [Google Scholar] [CrossRef]
- Chen, F.; Sekiyama, K.; Huang, J.; Sun, B.; Sasaki, H.; Fukuda, T. An assembly strategy scheduling method for human and robot coordinated cell manufacturing. Int. J. Intell. Comput. Cybern. 2011, 4, 487–510. [Google Scholar] [CrossRef]
- Weckenborg, C.; Kieckhäfer, K.; Müller, C.; Grunewald, M.; Spengler, T.S. Balancing of assembly lines with collaborative robots. Bus. Res. 2020, 13, 93–132. [Google Scholar] [CrossRef] [Green Version]
- Tsarouchi, P.; Matthaiakis, A.-S.; Makris, S.; Chryssolouris, G. On a human-robot collaboration in an assembly cell. Int. J. Comput. Integr. Manuf. 2017, 30, 580–589. [Google Scholar] [CrossRef] [Green Version]
- Tram, A.V.N.; Raweewan, M. Optimal Task Allocation in Human-Robotic Assembly Processes. In Proceedings of the 2020 5th International Conference on Robotics and Automation Engineering (ICRAE), Singapore, 20–22 November 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Peternel, L.; Tsagarakis, N.; Caldwell, D.; Ajoudani, A. Robot adaptation to human physical fatigue in human–robot co-manipulation. Auton. Robot. 2018, 42, 1011–1021. [Google Scholar] [CrossRef]
- Zhang, R.; Lv, Q.; Li, J.; Bao, J.; Liu, T.; Liu, S. A reinforcement learning method for human-robot collaboration in assembly tasks. Robot. Comput. -Integr. Manuf. 2022, 73, 102227. [Google Scholar] [CrossRef]
- Liu, H.; Fang, T.; Zhou, T.; Wang, L. Towards robust human-robot collaborative manufacturing: Multimodal fusion. IEEE Access 2018, 6, 74762–74771. [Google Scholar] [CrossRef]
- Saenz, J.; Elkmann, N.; Gibaru, O.; Neto, P. Survey of methods for design of collaborative robotics applications-why safety is a barrier to more widespread robotics uptake. In Proceedings of the 2018 4th International Conference on Mechatronics and Robotics Engineering, Cuernavaca, Mexico, 26–29 November 2018; Association for Computing Machinery: New York, NY, USA, 2018. [Google Scholar]
- Hashemi-Petroodi, S.E.; Thevenin, S.; Kovalev, S.; Dolgui, A. Operations management issues in design and control of hybrid human-robot collaborative manufacturing systems: A survey. Annu. Rev. Control 2020, 49, 264–276. [Google Scholar] [CrossRef]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Peternel, L.; Fang, C.; Tsagarakis, N.; Ajoudani, A. A selective muscle fatigue management approach to ergonomic human-robot co-manipulation. Robot. Comput.-Integr. Manuf. 2019, 58, 69–79. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Q.; Wang, L.; Xu, W.; Zhou, Z. Task-level decision-making for dynamic and stochastic human-robot collaboration based on dual agents deep reinforcement learning. Int. J. Adv. Manuf. Technol. 2021, 115, 3533–3552. [Google Scholar] [CrossRef]
- Demircan, E.; Yung, S.; Choi, M.; Baschshi, J.; Nguyen, B.; Rodriguez, J. Operational space analysis of human muscular effort in robot assisted reaching tasks. Robot. Auton. Syst. 2020, 125, 103429. [Google Scholar] [CrossRef]
- Gustavsson, P.; Holm, M.; Syberfeldt, A.; Wang, L. Human-robot collaboration–towards new metrics for selection of communication technologies. Procedia CIRP 2018, 72, 123–128. [Google Scholar] [CrossRef]
- Losey, D.P.; McDonald, C.G.; Battaglia, E.; O’Malley, M.K. A review of intent detection, arbitration, and communication aspects of shared control for physical human–robot interaction. Appl. Mech. Rev. 2018, 70, 010804. [Google Scholar] [CrossRef] [Green Version]
- Shu, B.; Sziebig, G.; Pieskä, S. Human-robot collaboration: Task sharing through virtual reality. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Bdiwi, M.; Pfeifer, M.; Sterzing, A. A new strategy for ensuring human safety during various levels of interaction with industrial robots. CIRP Ann. 2017, 66, 453–456. [Google Scholar] [CrossRef]
- Alkan, B.; Vera, D.; Ahmad, M.; Ahmad, B.; Harrison, R. A lightweight approach for human factor assessment in virtual assembly designs: An evaluation model for postural risk and metabolic workload. Procedia CIRP 2016, 44, 26–31. [Google Scholar] [CrossRef] [Green Version]
- Koltai, T.; Dimény, I.; Gallina, V.; Gaal, A.; Sepe, C. An analysis of task assignment and cycle times when robots are added to human-operated assembly lines, using mathematical programming models. Int. J. Prod. Econ. 2021, 242, 108292. [Google Scholar] [CrossRef]
- Hoffman, G. Evaluating Fluency in Human–Robot Collaboration. IEEE Trans. Hum.-Mach. Syst. 2019, 49, 209–218. [Google Scholar] [CrossRef]
- Cheng, Y.; Sun, F.; Zhang, Y.; Tao, F. Task allocation in manufacturing: A review. J. Ind. Inf. Integr. 2019, 15, 207–218. [Google Scholar] [CrossRef]
- Antakli, A.; Spieldenner, T.; Rubinstein, D.; Spieldenner, D.; Herrmann, E.; Sprenger, J.; Zinnikus, I. Agent-based Web Supported Simulation of Human-robot Collaboration. In Proceedings of the 15th International Conference on Web Information Systems and Technologies, WEBIST, Vienna, Austria, 18–20 September 2019. [Google Scholar]
- Malik, A.A.; Masood, T.; Bilberg, A. Virtual reality in manufacturing: Immersive and collaborative artificial-reality in design of human-robot workspace. Int. J. Comput. Integr. Manuf. 2020, 33, 22–37. [Google Scholar] [CrossRef]
- Mura, M.D.; Dini, G. Optimizing ergonomics in assembly lines: A multi objective genetic algorithm. CIRP J. Manuf. Sci. Technol. 2019, 27, 31–45. [Google Scholar] [CrossRef]
- Malik, A.A.; Bilberg, A. Complexity-based task allocation in human-robot collaborative assembly. In Industrial Robot: The International Journal of Robotics Research and Application; Emerald Group Publishing: Bingley, UK, 2019. [Google Scholar]
- Atashfeshan, N.; Saidi-Mehrabad, M.; Razavi, H. A novel dynamic function allocation method in human-machine systems focusing on trigger mechanism and allocation strategy. Reliab. Eng. Syst. Saf. 2021, 207, 107337. [Google Scholar] [CrossRef]
- Lee, M.-L.; Behdad, S.; Liang, X.; Zheng, M. Task allocation and planning for product disassembly with human–robot collaboration. Robot. Comput.-Integr. Manuf. 2022, 76, 102306. [Google Scholar] [CrossRef]
- Pupa, A.; Van Dijk, W.; Brekelmans, C.; Secchi, C. A Resilient and Effective Task Scheduling Approach for Industrial Human-Robot Collaboration. Sensors 2022, 22, 4901. [Google Scholar] [CrossRef] [PubMed]
- Liau, Y.Y.; Ryu, K. Genetic algorithm-based task allocation in multiple modes of human–robot collaboration systems with two cobots. Int. J. Adv. Manuf. Technol. 2022, 119, 7291–7309. [Google Scholar] [CrossRef]
- Lorenzini, M.; Kim, W.; De Momi, E.; Ajoudani, A. A new overloading fatigue model for ergonomic risk assessment with application to human-robot collaboration. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Harriott, C.E.; Zhang, T.; Adams, J.A. Assessing physical workload for human–robot peer-based teams. Int. J. Hum.-Comput. Stud. 2013, 71, 821–837. [Google Scholar] [CrossRef]
- Ferjani, A.; Ammar, A.; Pierreval, H.; Elkosantini, S. A simulation-optimization based heuristic for the online assignment of multi-skilled workers subjected to fatigue in manufacturing systems. Comput. Ind. Eng. 2017, 112, 663–674. [Google Scholar] [CrossRef]
- Yung, M.; Kolus, A.; Wells, R.; Neumann, W.P. Examining the fatigue-quality relationship in manufacturing. Appl. Ergon. 2020, 82, 102919. [Google Scholar] [CrossRef]
- Kearney, R.; Hunter, I. Dynamics of human ankle stiffness: Variation with displacement amplitude. J. Biomech. 1982, 15, 753–756. [Google Scholar] [CrossRef]
- Li, K.; Liu, Q.; Xu, W.; Liu, J.; Zhou, Z.; Feng, H. Sequence planning considering human fatigue for human-robot collaboration in disassembly. Procedia CIRP 2019, 83, 95–104. [Google Scholar] [CrossRef]
- Roveda, L.; Maskani, J.; Franceschi, P.; Abdi, A.; Braghin, F.; Tosatti, L.M.; Pedrocchi, N. Model-based reinforcement learning variable impedance control for human-robot collaboration. J. Intell. Robot. Syst. 2020, 100, 417–433. [Google Scholar] [CrossRef]
- Peternel, L.; Tsagarakis, N.; Ajoudani, A. A human–robot co-manipulation approach based on human sensorimotor information. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 811–822. [Google Scholar] [CrossRef]
- Mujica, M.; Crespo, M.; Benoussaad, M.; Junco, S.; Fourquet, J.-Y. Robust variable admittance control for human–robot co-manipulation of objects with unknown load. Robot. Comput.-Integr. Manuf. 2022, 79, 102408. [Google Scholar] [CrossRef]
- Michalos, G.; Spiliotopoulos, J.; Makris, S.; Chryssolouris, G. A method for planning human robot shared tasks. CIRP J. Manuf. Sci. Technol. 2018, 22, 76–90. [Google Scholar] [CrossRef]
- Bassani, G.; Filippeschi, A.; Avizzano, C.A. A Dataset of Human Motion and Muscular Activities in Manual Material Handling Tasks for Biomechanical and Ergonomic Analyses. IEEE Sens. J. 2021, 21, 24731–24739. [Google Scholar] [CrossRef]
- Stecke, K.E.; Mokhtarzadeh, M. Balancing collaborative human–robot assembly lines to optimise cycle time and ergonomic risk. Int. J. Prod. Res. 2021, 60, 25–47. [Google Scholar] [CrossRef]
- Weckenborg, C.; Thies, C.; Spengler, T.S. Harmonizing ergonomics and economics of assembly lines using collaborative robots and exoskeletons. J. Manuf. Syst. 2022, 62, 681–702. [Google Scholar] [CrossRef]
- Heydaryan, S.; Bedolla, J.S.; Belingardi, G. Safety design and development of a human-robot collaboration assembly process in the automotive industry. Appl. Sci. 2018, 8, 344. [Google Scholar] [CrossRef] [Green Version]
- Shu, B.; Sziebig, G.; Pieters, R. Architecture for safe human-robot collaboration: Multi-modal communication in virtual reality for efficient task execution. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Li, Y.; Tee, K.P.; Yan, R.; Limbu, D.K.; Ge, S.S. Shared control of human and robot by approximate dynamic programming. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Glock, C.; Grosse, E.; Kim, T.; Neumann, W.; Sobhani, A. An integrated cost and worker fatigue evaluation model of a packaging process. Int. J. Prod. Econ. 2019, 207, 107–124. [Google Scholar] [CrossRef]
- Yu, X.; He, W.; Li, Y.; Xue, C.; Li, J.; Zou, J.; Yang, C. Bayesian estimation of human impedance and motion intention for human–robot collaboration. IEEE Trans. Cybern. 2019, 51, 1822–1834. [Google Scholar] [CrossRef]
- Yu, X.; Li, Y.; Zhang, S.; Xue, C.; Wang, Y. Estimation of human impedance and motion intention for constrained human–robot interaction. Neurocomputing 2020, 390, 268–279. [Google Scholar] [CrossRef]
- Hernández, J.D.; Sobti, S.; Sciola, A.; Moll, M.; Kavraki, L.E. Increasing Robot Autonomy via Motion Planning and an Augmented Reality Interface. IEEE Robot. Autom. Lett. 2020, 5, 1017–1023. [Google Scholar] [CrossRef]
- Unhelkar, V.V.; Lasota, P.A.; Tyroller, Q.; Buhai, R.-D.; Marceau, L.; Deml, B.; Shah, J.A. Human-aware robotic assistant for collaborative assembly: Integrating human motion prediction with planning in time. IEEE Robot. Autom. Lett. 2018, 3, 2394–2401. [Google Scholar] [CrossRef] [Green Version]
- Shukla, D.; Erkent, Ö.; Piater, J. Learning semantics of gestural instructions for human-robot collaboration. Front. Neurorobotics 2018, 12, 7. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Tee, K.P.; Yan, R.; Ge, S.S. Reinforcement learning for human-robot shared control. Assem. Autom. 2019, 40, 105–117. [Google Scholar] [CrossRef] [Green Version]
- Hawkins, K.P.; Vo, N.; Bansal, S.; Bobick, A.F. Probabilistic human action prediction and wait-sensitive planning for responsive human-robot collaboration. In Proceedings of the 2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Atlanta, GA, USA, 15–17 October 2013; IEEE: Piscataway, NJ, USA. [Google Scholar]
- Petković, T.; Puljiz, D.; Marković, I.; Hein, B. Human intention estimation based on hidden Markov model motion validation for safe flexible robotized warehouses. Robot. Comput.-Integr. Manuf. 2019, 57, 182–196. [Google Scholar] [CrossRef] [Green Version]
- Tsarouchi, P.; Michalos, G.; Makris, S.; Athanasatos, T.; Dimoulas, K.; Chryssolouris, G. On a human–robot workplace design and task allocation system. Int. J. Comput. Integr. Manuf. 2017, 30, 1272–1279. [Google Scholar] [CrossRef]
- Mainprice, J.; Hayne, R.; Berenson, D. Predicting human reaching motion in collaborative tasks using inverse optimal control and iterative re-planning. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Mainprice, J.; Berenson, D. Human-robot collaborative manipulation planning using early prediction of human motion. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Rozo, L.; Calinon, S.; Caldwell, D.G.; Jimenez, P.; Torras, C. Learning physical collaborative robot behaviors from human demonstrations. IEEE Trans. Robot. 2016, 32, 513–527. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Peng, G.; Wang, W.; Chen, Y.; Jia, Y.; Liu, S. Prediction-Based Human-Robot Collaboration in Assembly Tasks Using a Learning from Demonstration Model. Sensors 2022, 22, 4279. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Rozo, L.; Silvério, J.; Caldwell, D.G. Kernelized movement primitives. Int. J. Robot. Res. 2019, 38, 833–852. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Wang, H.; Zhang, S.; Wang, S.; Han, K. Human Motion Trajectory Prediction in Human-Robot Collaborative Tasks. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019. [Google Scholar]
- Vianello, L.; Mouret, J.-B.; Dalin, E.; Aubry, A.; Ivaldi, S. Human Posture Prediction during Physical Human-Robot Interaction. IEEE Robot. Autom. Lett. 2021, 6, 6046–6053. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L. Human motion prediction for human-robot collaboration. J. Manuf. Syst. 2017, 44, 287–294. [Google Scholar] [CrossRef]
- Gustavsson, P.; Syberfeldt, A.; Brewster, R.; Wang, L. Human-robot collaboration demonstrator combining speech recognition and haptic control. Procedia CIRP 2017, 63, 396–401. [Google Scholar] [CrossRef]
- Lamon, E.; De Franco, A.; Peternel, L.; Ajoudani, A. A capability-aware role allocation approach to industrial assembly tasks. IEEE Robot. Autom. Lett. 2019, 4, 3378–3385. [Google Scholar] [CrossRef] [Green Version]
- Bernard, J.; Dobermann, E.; Vögele, A.; Krüger, B.; Kohlhammer, J.; Fellner, D. Visual-interactive semi-supervised labeling of human motion capture data. Electron. Imaging 2017, 2017, 34–45. [Google Scholar] [CrossRef]
- Dianatfar, M.; Latokartano, J.; Lanz, M. Review on existing VR/AR solutions in human–robot collaboration. Procedia CIRP 2021, 97, 407–411. [Google Scholar] [CrossRef]
- Danielsson, O.; Syberfeldt, A.; Brewster, R.; Wang, L. Assessing instructions in augmented reality for human-robot collaborative assembly by using demonstrators. Procedia CIRP 2017, 63, 89–94. [Google Scholar] [CrossRef]
- Liu, X.; Ge, S.S. Optimized control for human-multi-robot collaboration via multi-agent adaptive dynamic programming. IFAC-Pap. 2020, 53, 9207–9212. [Google Scholar] [CrossRef]
- Park, C.; Pan, J.; Manocha, D. Real-time optimization-based planning in dynamic environments using GPUs. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Mabkhot, M.M.; Al-Ahmari, A.M.; Salah, B.; Alkhalefah, H. Requirements of the smart factory system: A survey and perspective. Machines 2018, 6, 23. [Google Scholar] [CrossRef] [Green Version]
- Kardos, C.; Kemény, Z.; Kovács, A.; Pataki, B.E.; Váncza, J. Context-dependent multimodal communication in human-robot collaboration. Procedia CIRP 2018, 72, 15–20. [Google Scholar] [CrossRef]
- Maurtua, I.; Fernandez, I.; Tellaeche, A.; Kildal, J.; Susperregi, L.; Ibarguren, A.; Sierra, B. Natural multimodal communication for human–robot collaboration. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417716043. [Google Scholar] [CrossRef] [Green Version]
- Krüger, J.; Lien, T.K.; Verl, A. Cooperation of human and machines in assembly lines. CIRP Ann. 2009, 58, 628–646. [Google Scholar] [CrossRef]
- Cheng, H.; Xu, W.; Ai, Q.; Liu, Q.; Zhou, Z.; Pham, D.T. Manufacturing capability assessment for human-robot collaborative disassembly based on multi-data fusion. Procedia Manuf. 2017, 10, 26–36. [Google Scholar] [CrossRef]
- Casalino, A.; Zanchettin, A.M.; Piroddi, L.; Rocco, P. Optimal scheduling of human–robot collaborative assembly operations with time petri nets. IEEE Trans. Autom. Sci. Eng. 2019, 18, 70–84. [Google Scholar] [CrossRef]
- Mokhtarzadeh, M.; Tavakkoli-Moghaddam, R.; Vahedi-Nouri, B.; Farsi, A. Scheduling of human-robot collaboration in assembly of printed circuit boards: A constraint programming approach. Int. J. Comput. Integr. Manuf. 2020, 33, 460–473. [Google Scholar] [CrossRef]
- Mayima, A.; Clodic, A.; Alami, R. Toward a Robot Computing an Online Estimation of the Quality of its Interaction with its Human Partner. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020. [Google Scholar]
- Xia, P.; Lopes, A.M.; Restivo, M.T. A review of virtual reality and haptics for product assembly (part 1): Rigid parts. Assem. Autom. 2013, 33, 68–77. [Google Scholar] [CrossRef]
- Çil, Z.A.; Li, Z.; Mete, S.; Özceylan, E. Mathematical model and bee algorithms for mixed-model assembly line balancing problem with physical human–robot collaboration. Appl. Soft Comput. 2020, 93, 106394. [Google Scholar] [CrossRef]
- Sun, B.-Q.; Wang, L.; Peng, Z.Q. Bound-guided hybrid estimation of distribution algorithm for energy-efficient robotic assembly line balancing. Comput. Ind. Eng. 2020, 146, 106604. [Google Scholar] [CrossRef]
- Matsas, E.; Vosniakos, G.C.; Batras, D. Effectiveness and acceptability of a virtual environment for assessing human–robot collaboration in manufacturing. Int. J. Adv. Manuf. Technol. 2017, 92, 3903–3917. [Google Scholar] [CrossRef]
- Malik, A.A.; Brem, A. Digital twins for collaborative robots: A case study in human-robot interaction. Robot. Comput.-Integr. Manuf. 2021, 68, 102092. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, J.; Liu, J.; Liu, X.; Wang, J. Digital Twin-based Design and Operation of Human-Robot Collaborative Assembly. IFAC-Pap. 2022, 55, 295–300. [Google Scholar] [CrossRef]
- Ji, W.; Yin, S.; Wang, L. A virtual training based programming-free automatic assembly approach for future industry. IEEE Access 2018, 6, 43865–43873. [Google Scholar] [CrossRef]
- Zhu, W.; Fan, X.; Zhang, Y. Applications and research trends of digital human models in the manufacturing industry. Virtual Real. Intell. Hardw. 2019, 1, 558–579. [Google Scholar] [CrossRef]
- Maurya, C.M.; Karmakar, S.; Das, A.K. Digital human modeling (DHM) for improving work environment for specially-abled and elderly. SN Appl. Sci. 2019, 1, 1326. [Google Scholar] [CrossRef] [Green Version]
- Matsas, E.; Vosniakos, G.-C. Design of a virtual reality training system for human–robot collaboration in manufacturing tasks. Int. J. Interact. Des. Manuf. 2017, 11, 139–153. [Google Scholar] [CrossRef]
- Schaal, S. Dynamic movement primitives-a framework for motor control in humans and humanoid robotics. In Adaptive Motion of Animals and Machines; Springer: Berlin/Heidelberg, Germany, 2006; pp. 261–280. [Google Scholar]
- Paredes-Astudillo, Y.A.; Moreno, D.; Vargas, A.-M.; Angel, M.-A.; Perez, S.; Jimenez, J.-F.; Saavedra-Robinson, L.A.; Trentesaux, D. Human fatigue aware cyber-physical Production system. In Proceedings of the 2020 IEEE International Conference on Human-Machine Systems (ICHMS), Rome, Italy, 7–9 September 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- El Makrini, I.; Mathijssen, G.; Verhaegen, S.; Verstraten, T.; Vanderborght, B. A Virtual Element-Based Postural Optimization Method for Improved Ergonomics During Human-Robot Collaboration. IEEE Trans. Autom. Sci. Eng. 2022, 19, 1772–1783. [Google Scholar] [CrossRef]
- Tenbrink, L.; Feldotto, B.; Röhrbein, F.; Knoll, A. Motion prediction of virtual patterns, human hand motions, and a simplified hand manipulation task with hierarchical temporal memory. In Proceedings of the 2019 IEEE International Conference on Cyborg and Bionic Systems (CBS), Munich, Germany, 18–20 September 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Liu, H.; Qu, D.; Xu, F.; Zou, F.; Song, J.; Jia, K. A human-robot collaboration framework based on human motion prediction and task model in virtual environment. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Kim, W.; Lee, J.; Peternel, L.; Tsagarakis, N.; Ajoudani, A. Anticipatory robot assistance for the prevention of human static joint overloading in human–robot collaboration. IEEE Robot. Autom. Lett. 2017, 3, 68–75. [Google Scholar] [CrossRef]
- Ding, W.; Liu, K.; Cheng, F.; Zhang, J. Learning hierarchical spatio-temporal pattern for human activity prediction. J. Vis. Commun. Image Represent. 2016, 35, 103–111. [Google Scholar] [CrossRef]
- Elkosantini, S.; Gien, D. Integration of human behavioural aspects in a dynamic model for a manufacturing system. Int. J. Prod. Res. 2009, 47, 2601–2623. [Google Scholar] [CrossRef] [Green Version]
- Scalera, L.; Giusti, A.; Vidoni, R.; Gasparetto, A. Enhancing fluency and productivity in human-robot collaboration through online scaling of dynamic safety zones. Int. J. Adv. Manuf. Technol. 2022, 121, 6783–6798. [Google Scholar] [CrossRef]
- Battini, D.; Delorme, X.; Dolgui, A.; Persona, A.; Sgarbossa, F. Ergonomics in assembly line balancing based on energy expenditure: A multi-objective model. Int. J. Prod. Res. 2016, 54, 824–845. [Google Scholar] [CrossRef]
- Battaïa, O.; Dolgui, A. A taxonomy of line balancing problems and their solution approaches. Int. J. Prod. Econ. 2013, 142, 259–277. [Google Scholar] [CrossRef]
- Rückert, P.; Wohlfromm, L.; Tracht, K. Implementation of virtual reality systems for simulation of human-robot collaboration. Procedia Manuf. 2018, 19, 164–170. [Google Scholar] [CrossRef]
- Jasiulewicz-Kaczmarek, M.; Saniuk, A. Human Factor in Sustainable Manufacturing. In Universal Access in Human-Computer Interaction. Access to the Human Environment and Culture: 9th International Conference, UAHCI 2015, Held as Part of HCI International 2015, Los Angeles, CA, USA, 2–7 August 2015, Proceedings, Part IV; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; Volume 9178, pp. 444–455. [Google Scholar]
- Hopko, S.K.; Khurana, R.; Mehta, R.K.; Pagilla, P.R. Effect of cognitive fatigue, operator sex, and robot assistance on task performance metrics, workload, and situation awareness in human-robot collaboration. IEEE Robot. Autom. Lett. 2021, 6, 3049–3056. [Google Scholar] [CrossRef]
- Fratczak, P.; Goh, Y.M.; Kinnell, L.; Justham, L.; Soltoggio, A. Virtual Reality Study of Human Adaptability in Industrial Human-Robot Collaboration. In Proceedings of the 2020 IEEE International Conference on Human-Machine Systems (ICHMS), Rome, Italy, 7–9 September 2020; IEEE: Piscataway, NJ, USA, 2020.
- Lippi, M.; Marino, A. A mixed-integer linear programming formulation for human multi-robot task allocation. In Proceedings of the 2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Vancouver, BC, Canada, 8–12 August 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]














| Search Expressions | Synonyms/Definition | ||
|---|---|---|---|
| Collaborative assembly | Human–robot | Collaborative Robot | |
| Main SE | Human–machine | Robot Interaction | |
| Human-in-the-Loop | Co-manipulation | ||
| Task allocation | Shared task | Function allocation | |
| SE1 | Task synchronization | Task distribution | |
| Job assignment | Line balancing | ||
| Motion planning | Movement | Action | |
| SE2 | Gesture | Hand guiding | |
| Posture | Coordination | ||
| Mathematical programming | Optimization | Algorithm | |
| SE3 | Mathematical model | Reinforcement learning | |
| Linear programming | |||
| Human factors and ergonomics | Physical fatigue | Workload/effort | |
| SE4 | Energy/metabolic expenditure | Muscular analysis | |
| Joint overload | Safety | ||
| Digital modeling | Digital human | Simulation | |
| SE5 | Virtual reality | Machine vision | |
| 3D representation | Demonstrator | ||
| Prediction | Control | Instruction | |
| SE6 | Adaptation | (p)Recognition | |
| Intuition | Perception | ||
| Control Method Used | |||||
|---|---|---|---|---|---|
| Reference | Problem | A | B | C | D |
| Wang, Gao [5] | Symbiotic HRC | ✔ | ✔ | ✔ | |
| Dianatfar, Latokartano [87] | VR/AR environment | ✔ | ✔ | ||
| Mainprice and Berenson [77] | Trajectory optimizer | ✔ | ✔ | ✔ | |
| Peternel, Tsagarakis [25] | Robot adaption | ✔ | ✔ | ✔ | |
| Malik, Masood [43] | VR environment | ✔ | ✔ | ||
| Danielsson, Syberfeldt [88] | AR environment | ✔ | |||
| No. of Papers per Year | Task Allocation | % of Growth | Action Recognition and Motion Planning | % of Growth | Physical Ergonomics and Fatigue | % of Growth |
|---|---|---|---|---|---|---|
| 2022 | 18 | +12.5 | 12 | 0 | 15 | −11.76 |
| 2021 | 16 | +77.77 | 12 | +50 | 17 | +183.33 |
| 2020 | 9 | −22.22 | 8 | +60 | 6 | +20 |
| 2019 | 11 | +10 | 5 | +25 | 5 | −16.66 |
| 2018 | 10 | +50 | 4 | +50 | 6 | / |
| 2017 | 5 | 2 | 0 | |||
| Average value | 11.5 | +25.61 | 7.16 | +37 | 9.8 | +43.73 |
| Sum | 69 | 43 | 49 |
 | |||
| Highest and least represented clusters |
 | ||
| Sub-cluster gap levels | [13], [25], [31], [49], [50], [56], [57], [58], [59], [60], [61], [57], [68], [78], [85], [89], [94], [114] |
 | [13], [25], [31], [49], [50], [59], [61], [114] |
| [12], [13], [43], [63], [69], [87], [88], [92], [103], [104], [110] |
 | [12], [13], [63], [103], [110] | |
| [13], [30], [94], [115] |
 | [13] | |
| [78], [79], [84], [88], [87] |
 | ||
| [2], [13], [16], [51], [55], [59], [62], [71] |
 | [2], [13], [16], [51], [55], [59], [62], [71] | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yonga Chuengwa, T.; Swanepoel, J.A.; Kurien, A.M.; Kanakana-Katumba, M.G.; Djouani, K. Research Perspectives in Collaborative Assembly: A Review. Robotics 2023, 12, 37. https://doi.org/10.3390/robotics12020037
Yonga Chuengwa T, Swanepoel JA, Kurien AM, Kanakana-Katumba MG, Djouani K. Research Perspectives in Collaborative Assembly: A Review. Robotics. 2023; 12(2):37. https://doi.org/10.3390/robotics12020037
Chicago/Turabian StyleYonga Chuengwa, Thierry, Jan Adriaan Swanepoel, Anish Matthew Kurien, Mukondeleli Grace Kanakana-Katumba, and Karim Djouani. 2023. "Research Perspectives in Collaborative Assembly: A Review" Robotics 12, no. 2: 37. https://doi.org/10.3390/robotics12020037