Luenberger Position Observer Based on Deadbeat-Current Predictive Control for Sensorless PMSM


Abstract
:1. Introduction
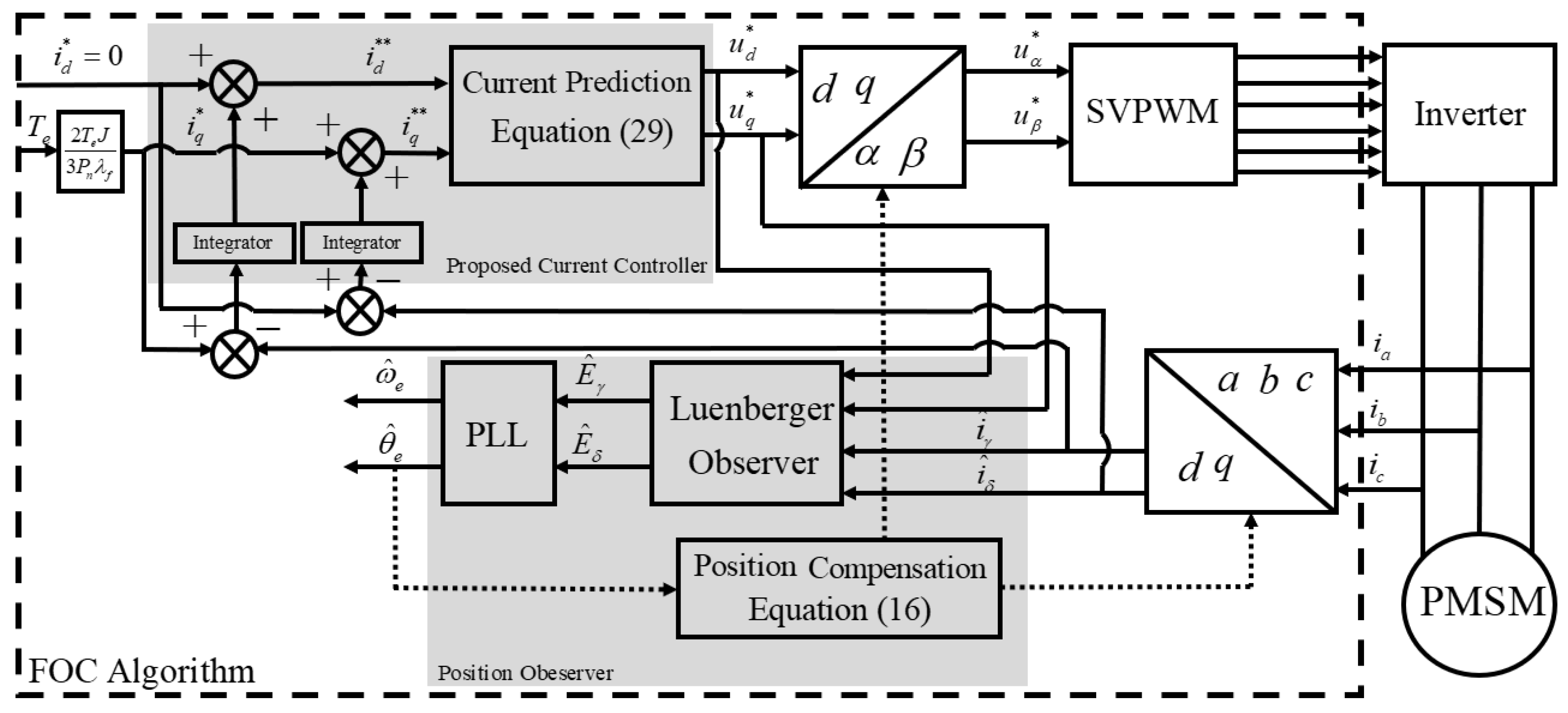
- In order to solve the phase-lag of estimated extended back-EMF, a Luenberger observer and two-order PLL position tracker are applied to observe the rotor position and speed.
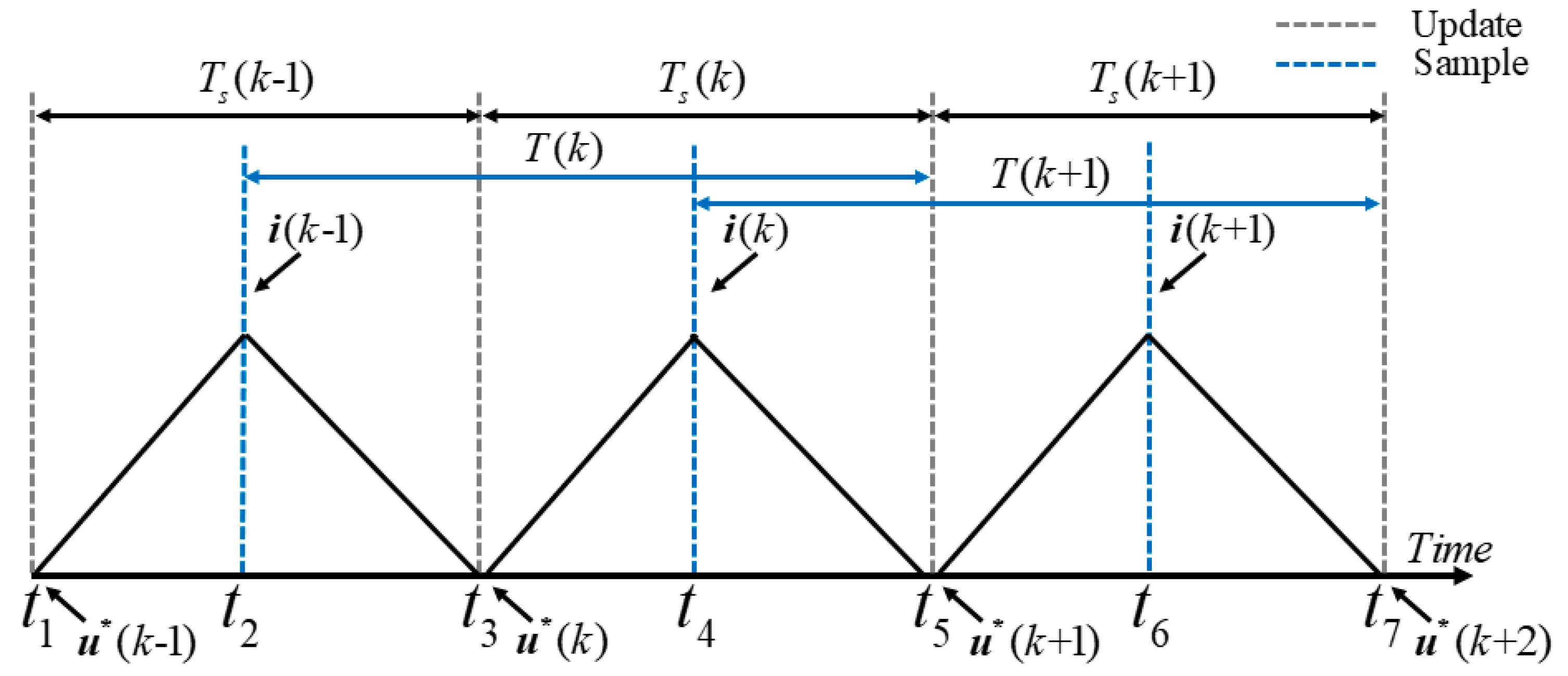
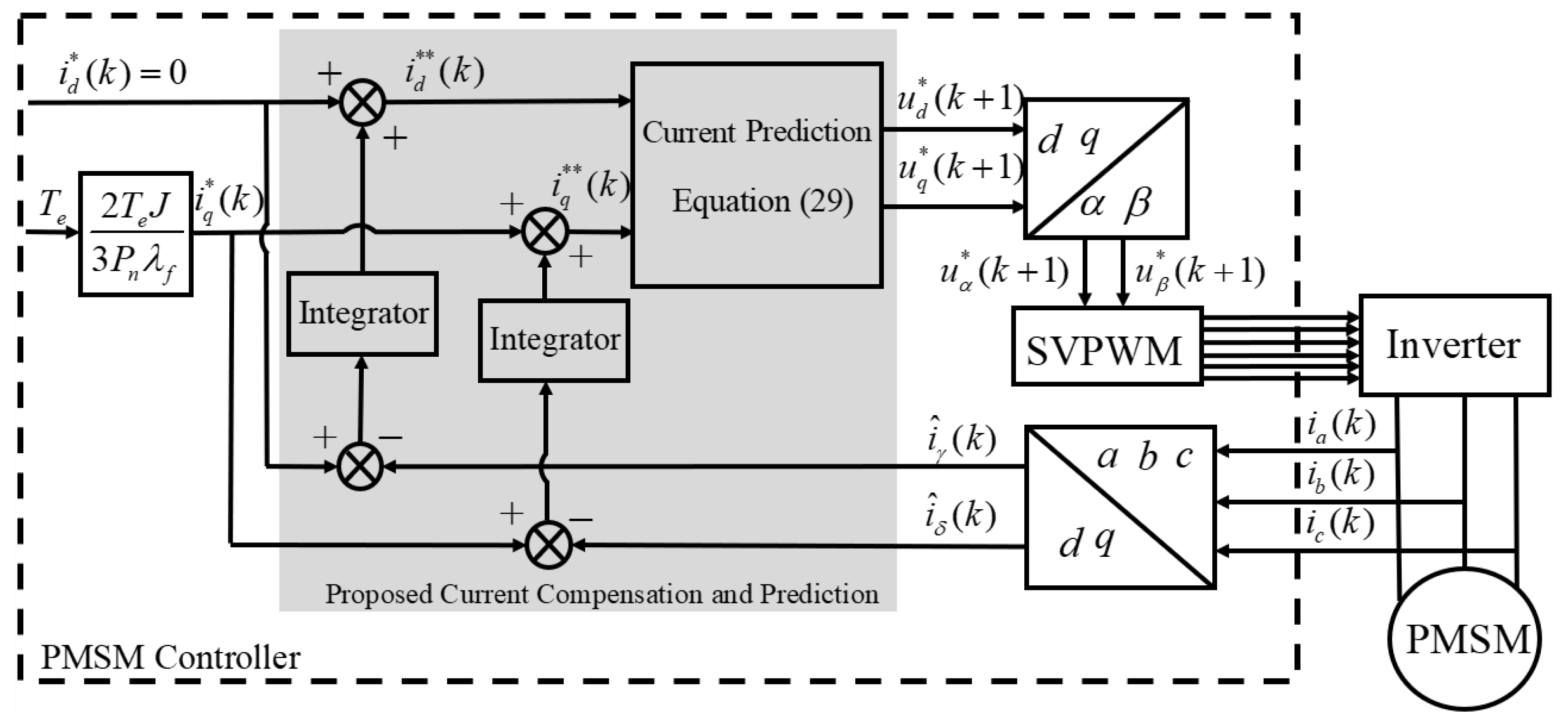
- Key PWM time-sequence logic relationship between current sampling and voltage command update is established. Based on this relationship, a deadbeat-current predictive method is proposed to calculate real-time voltage command value.
- Furthermore, due to the unavoidable parameter fluctuation of PMSM during operation, a current compensation method is proposed to reduce current ripple.
2. Rotor Speed and Position Observer
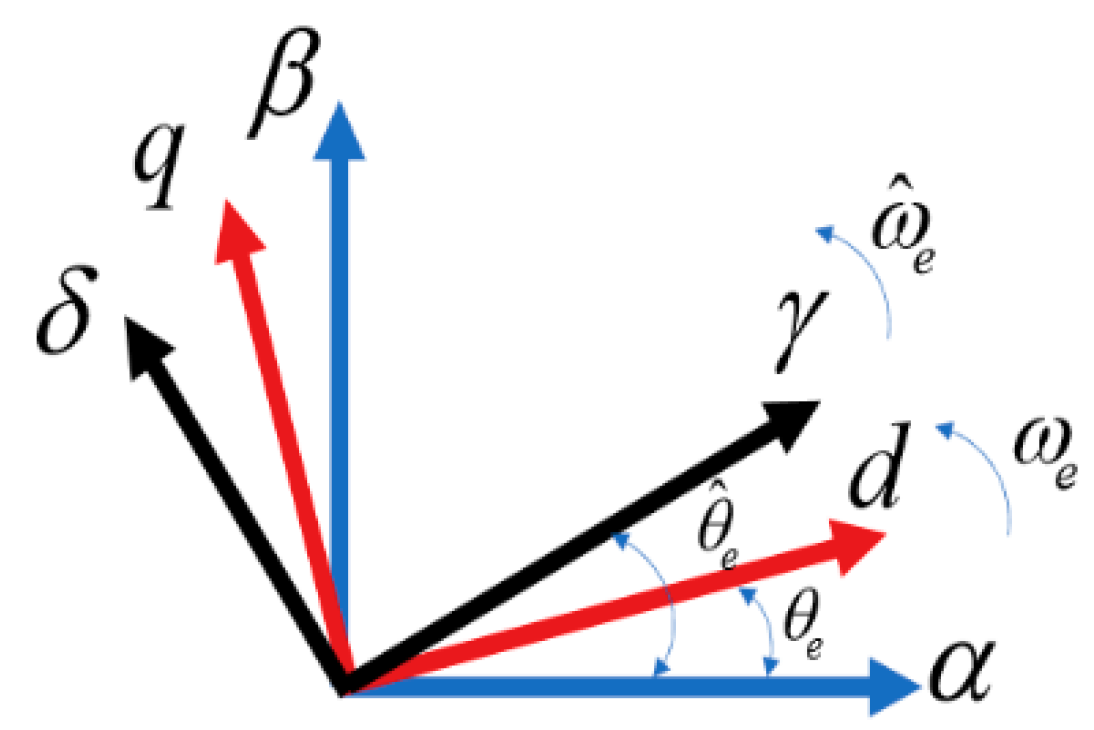
2.1. PMSM Mathematical Model
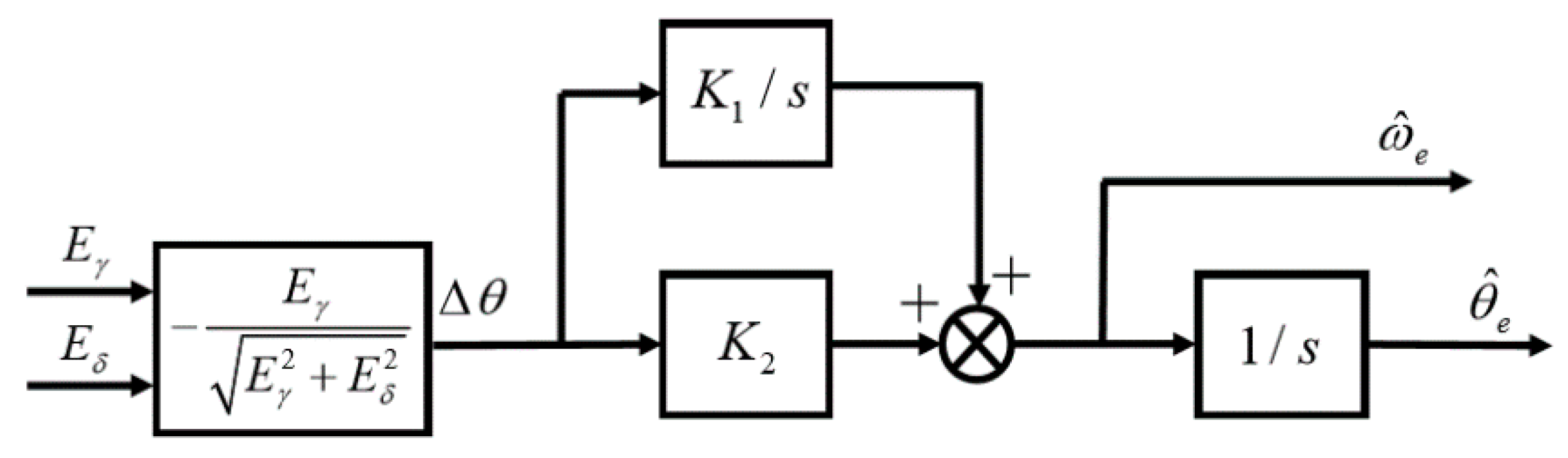
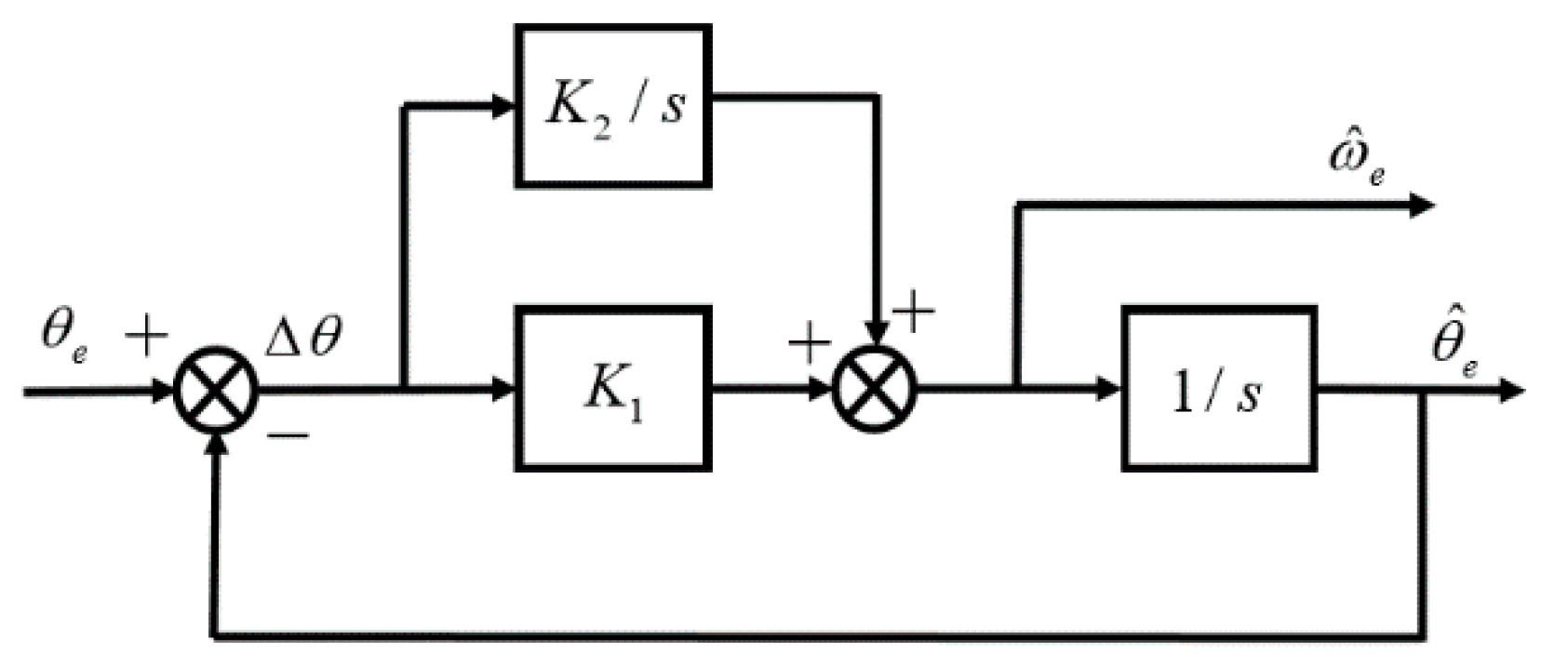
2.2. Second-Order PLL Rotor Position Tracker
3. Proposed and Conventional Current Prediction Model
3.1. Conventional Current Predictive Model
3.2. Deadbeat Linearized Current Predictive Model
3.3. Current Compensation
3.4. System Stability Analysis
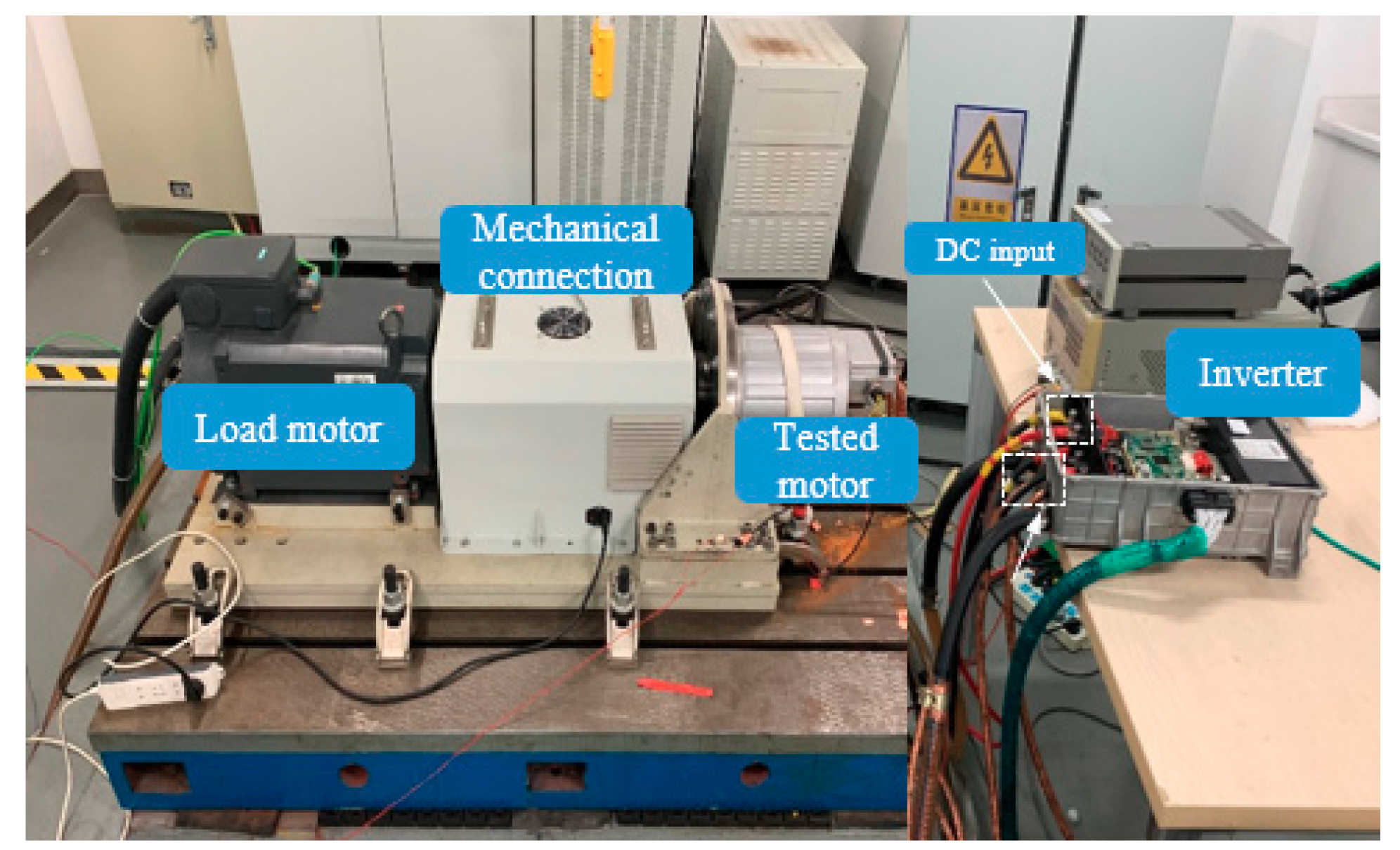
4. Experimental Results
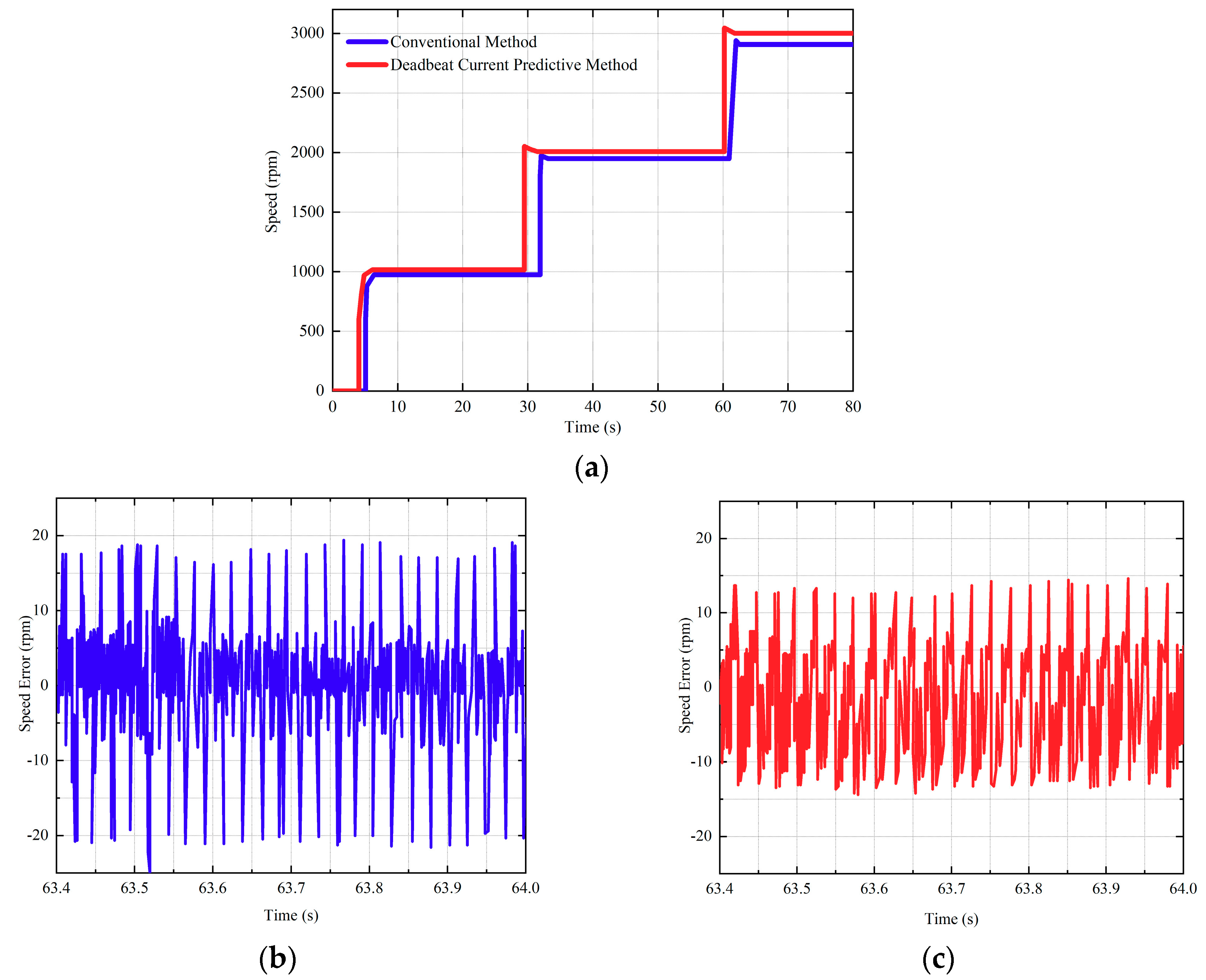
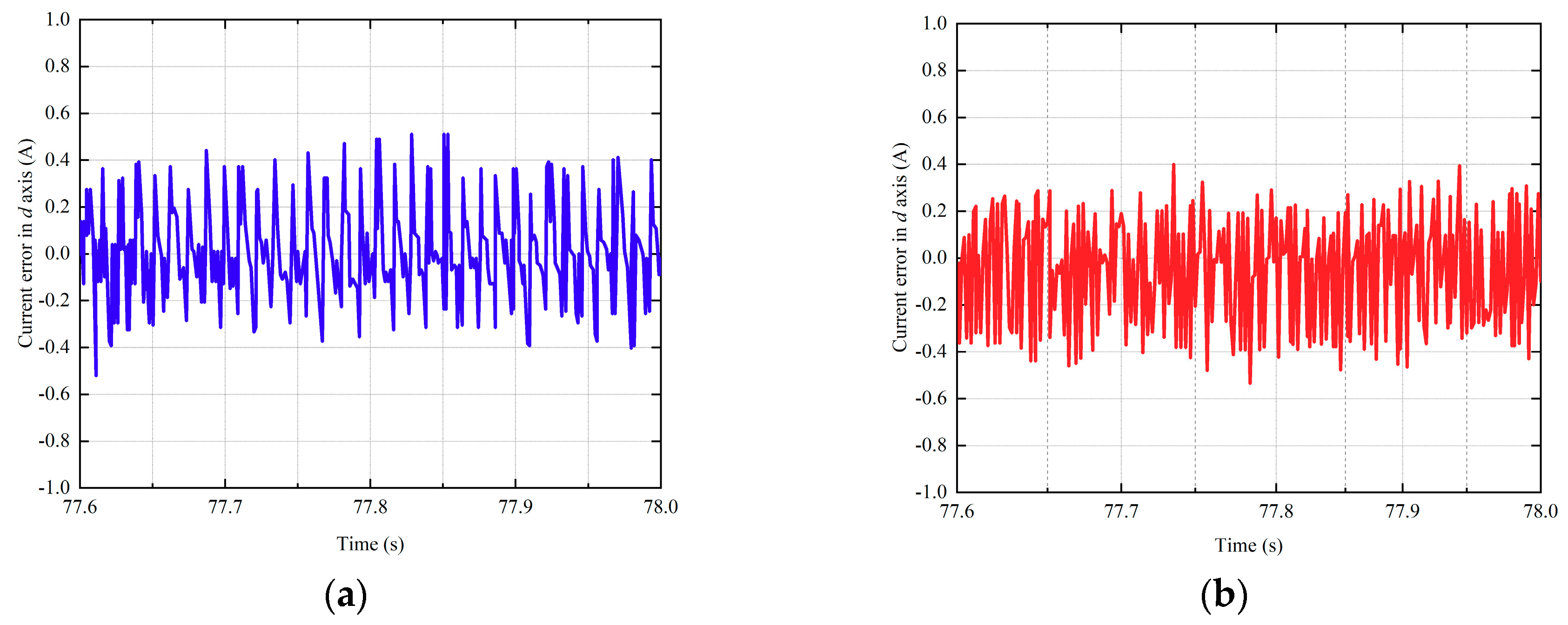
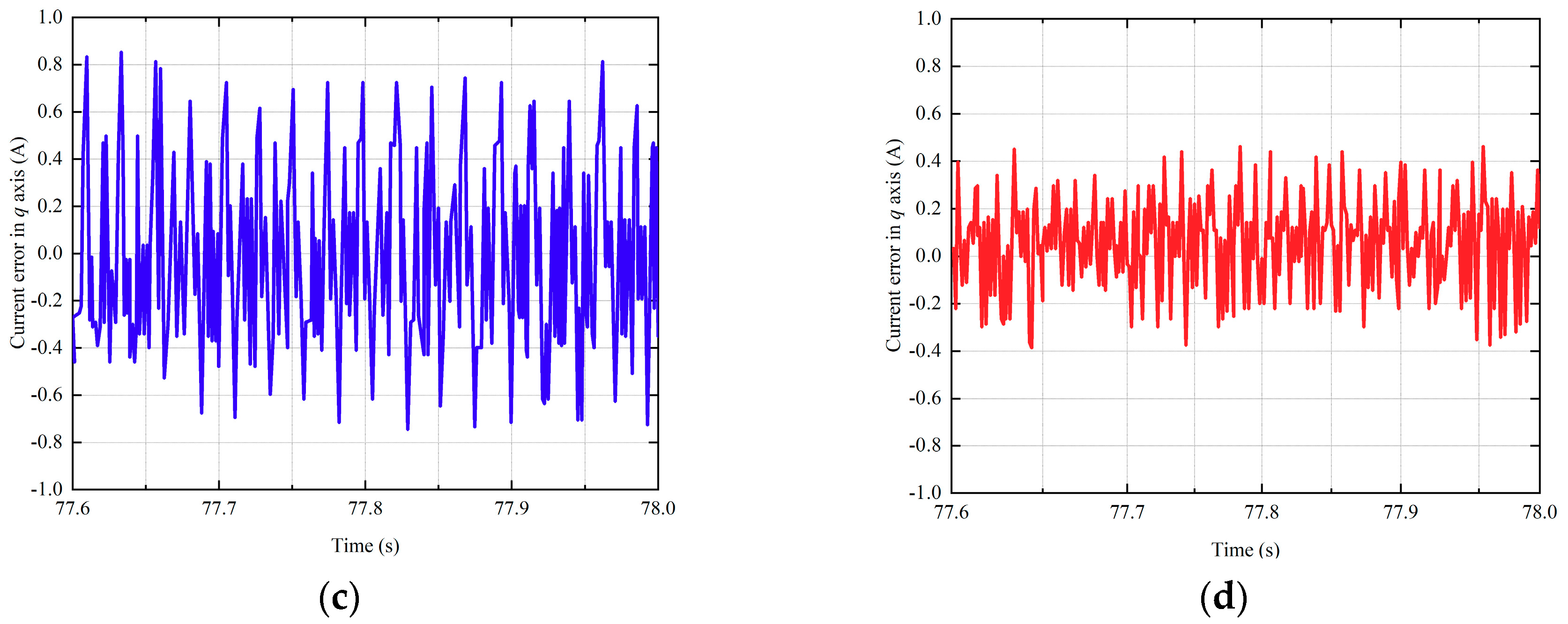
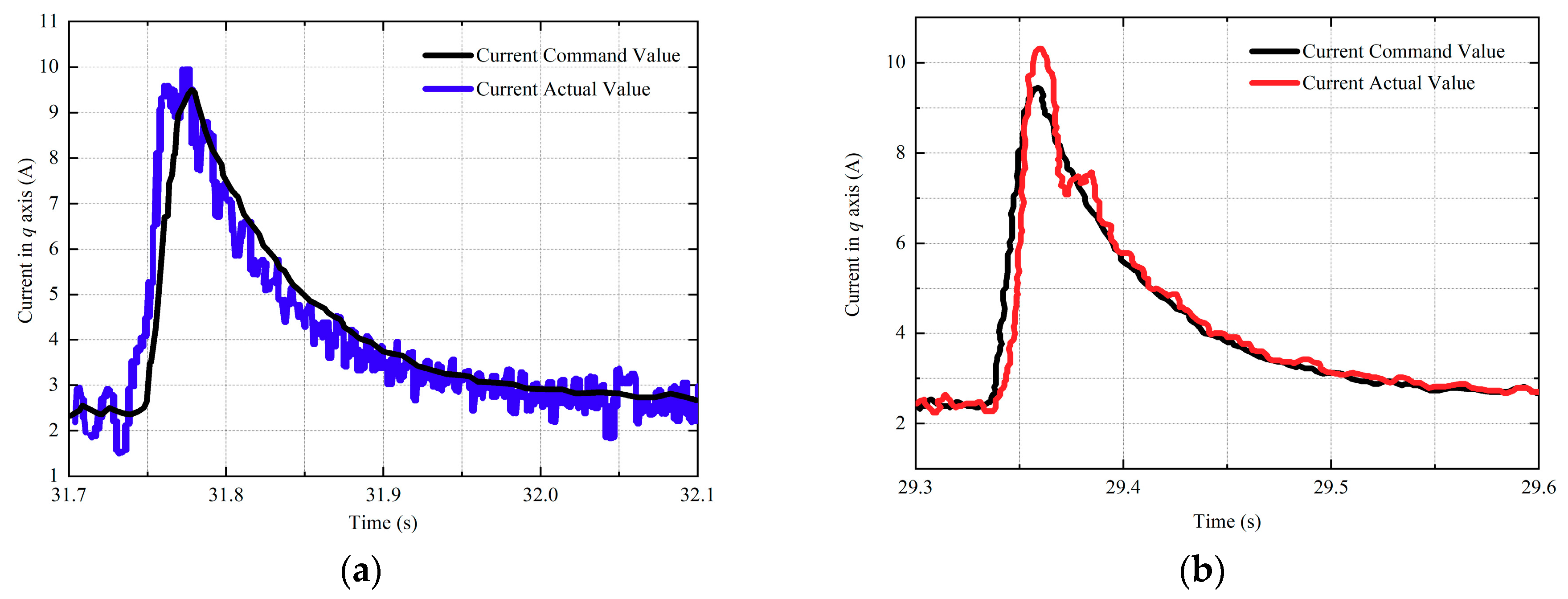
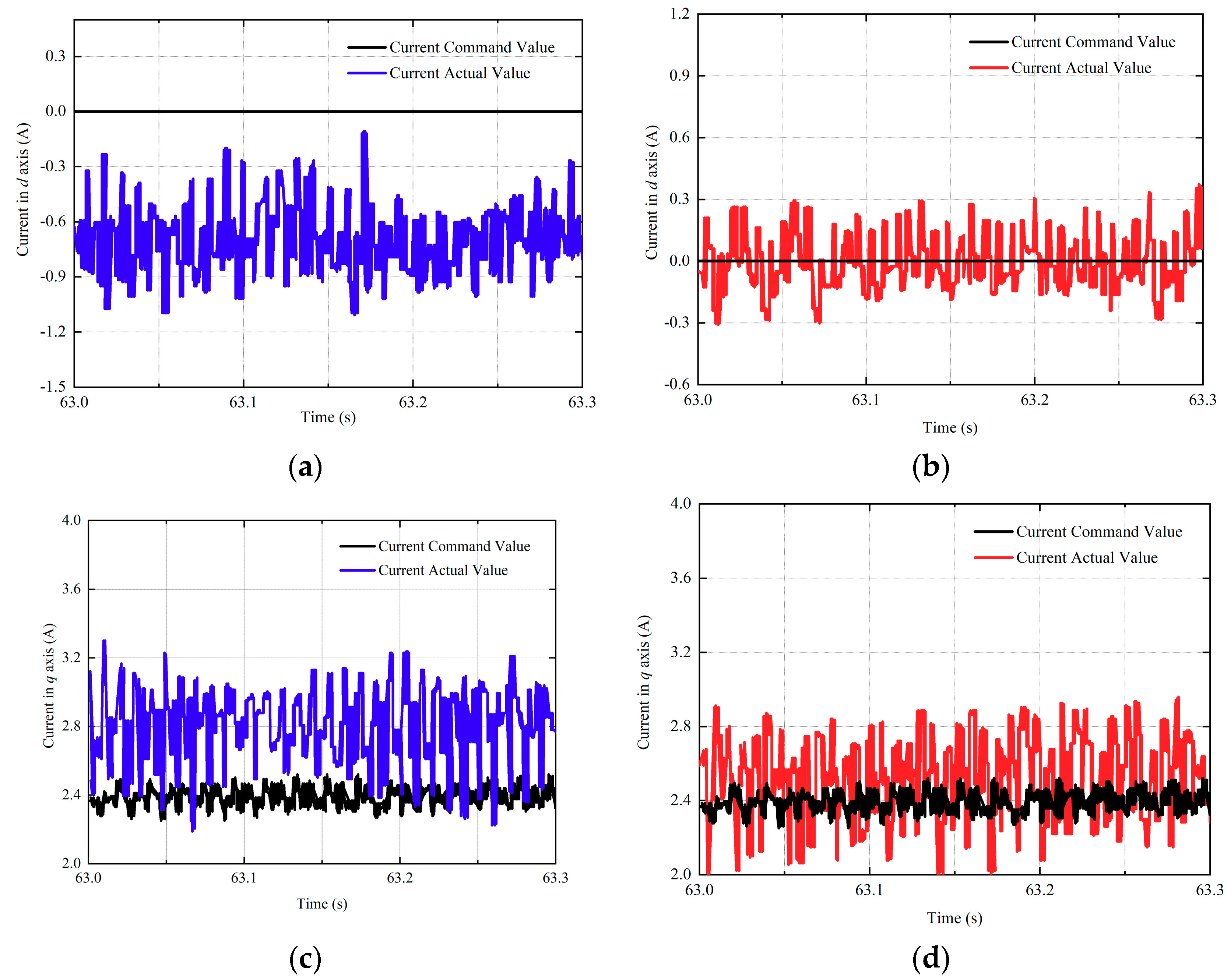
4.1. Experimental Results of Deadbeat-Current Predictive Control Method
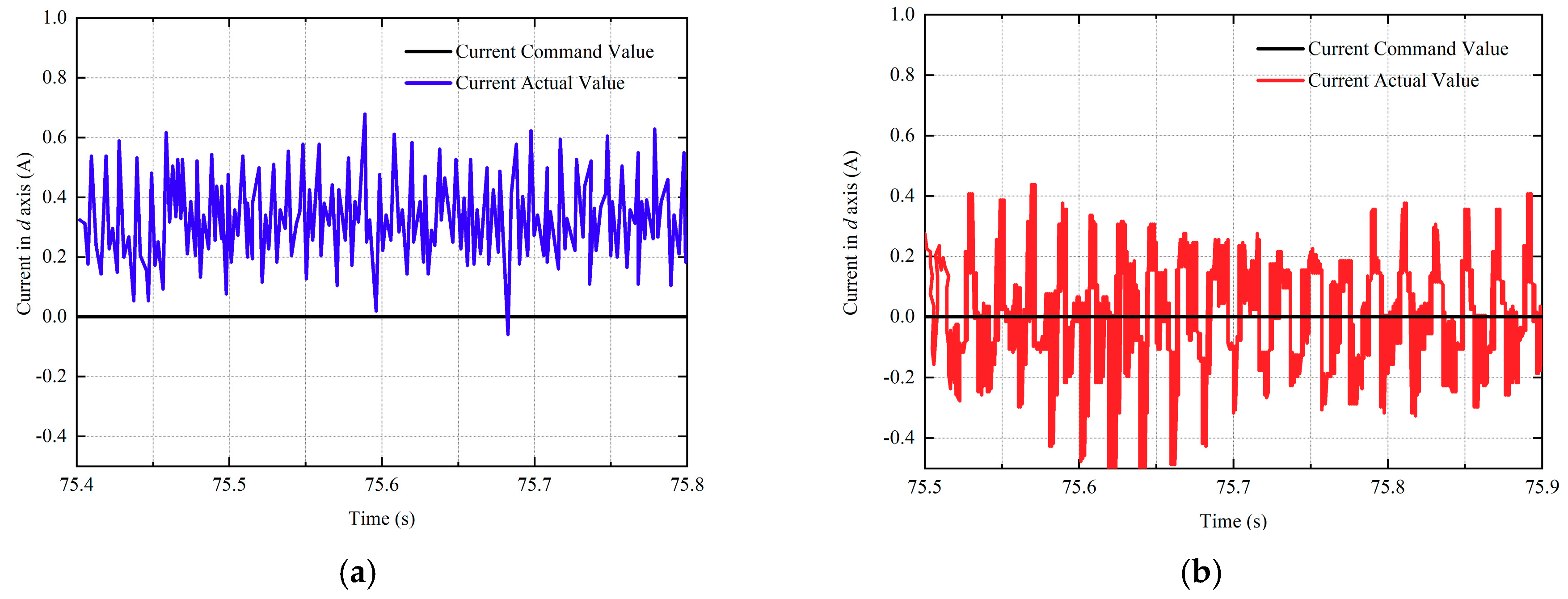
4.2. Experimental Results of the Proposed Current Compensation with the System Parameter Fluctuation
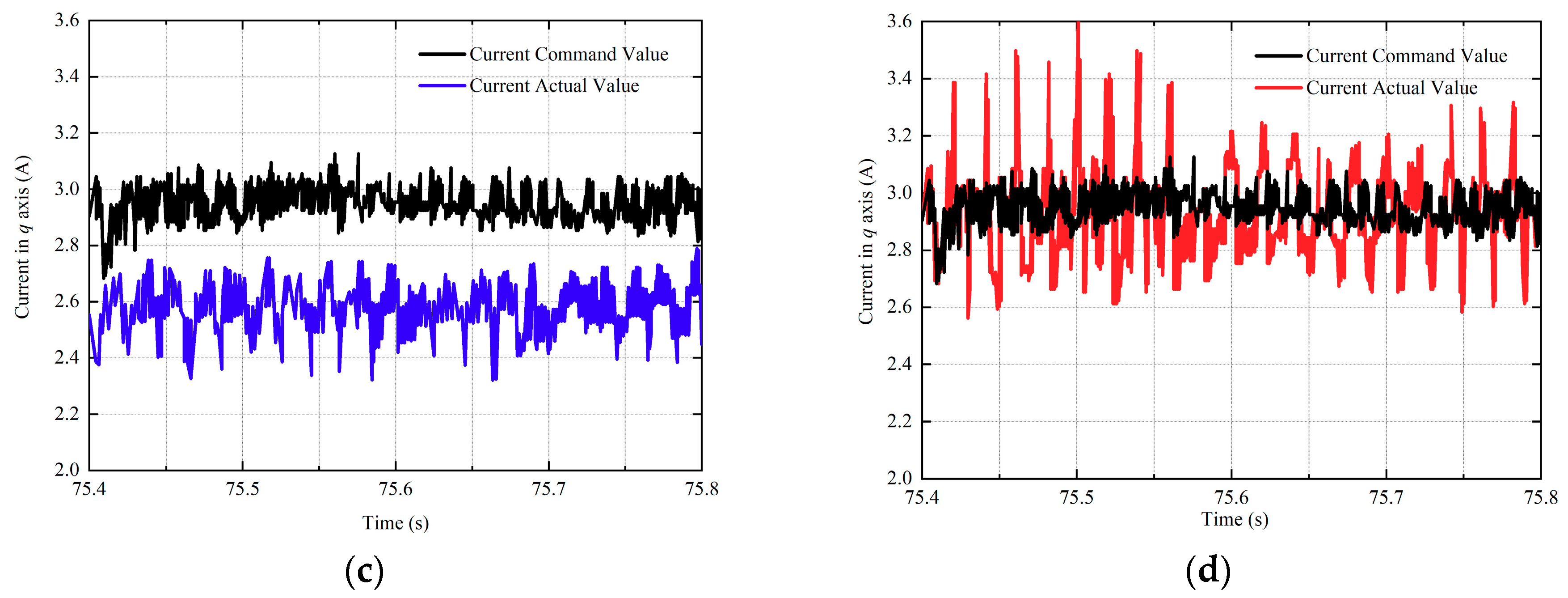
4.3. Experimental Results of Rotor Position and Speed Sensorless Observer
5. Conclusions
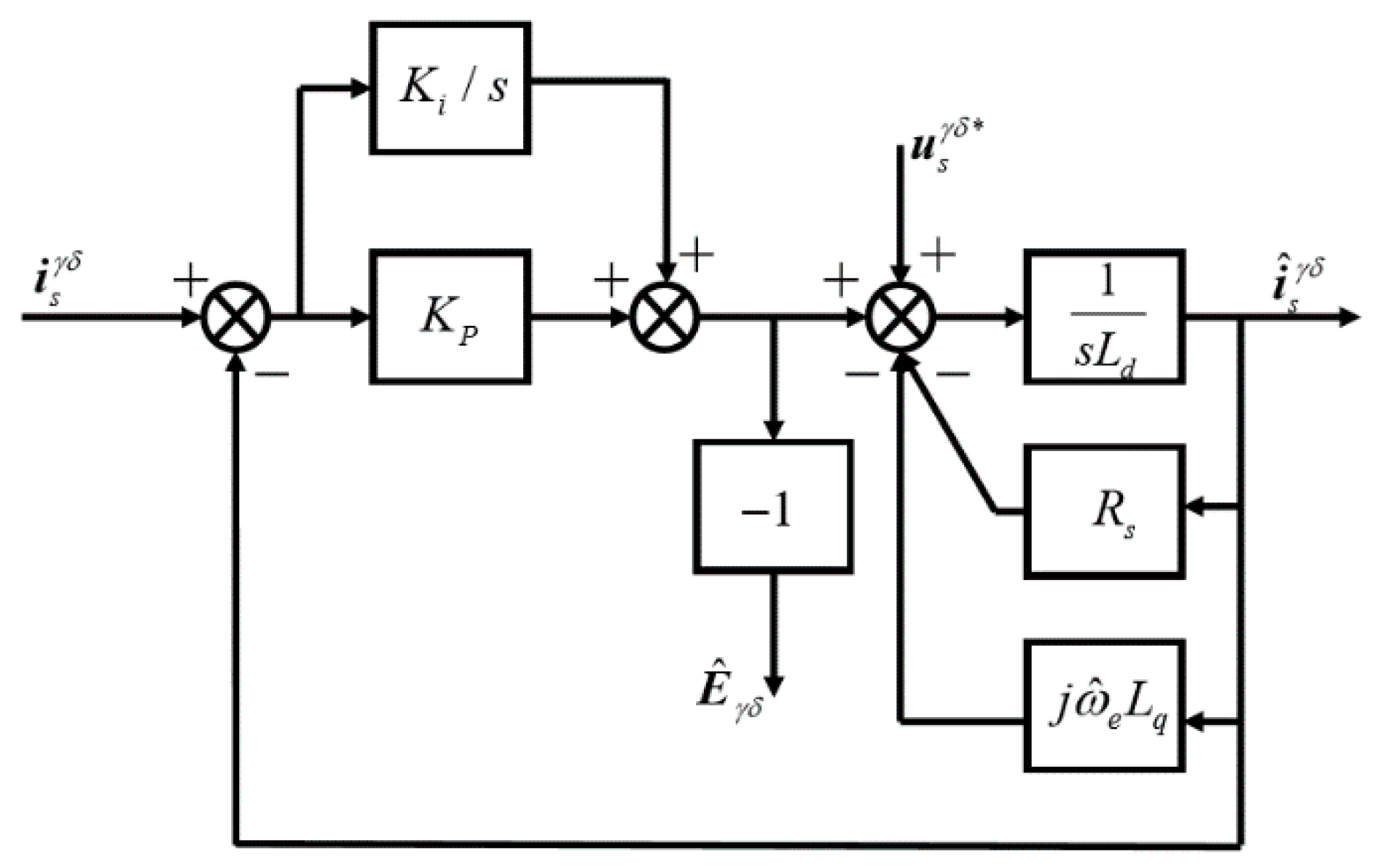
- To solve the phase-lag of estimated extended back-EMF, Luenberger observer and second-order PLL position tracker, in rotational frame, are applied to observe the rotor position and speed, because extended back-EMF signal in rotational frame is a DC signal.
- A deadbeat-current predictive method, by predicting current change is linear within one predictive control period, is proposed to obtain real-time voltage command value.
- Due to the unavoidable parameter fluctuation of PMSM during operation, a current compensation method is proposed, which can reduce current error caused by parameter fluctuation. The method of determining the gain in integrator is designed by system stability.
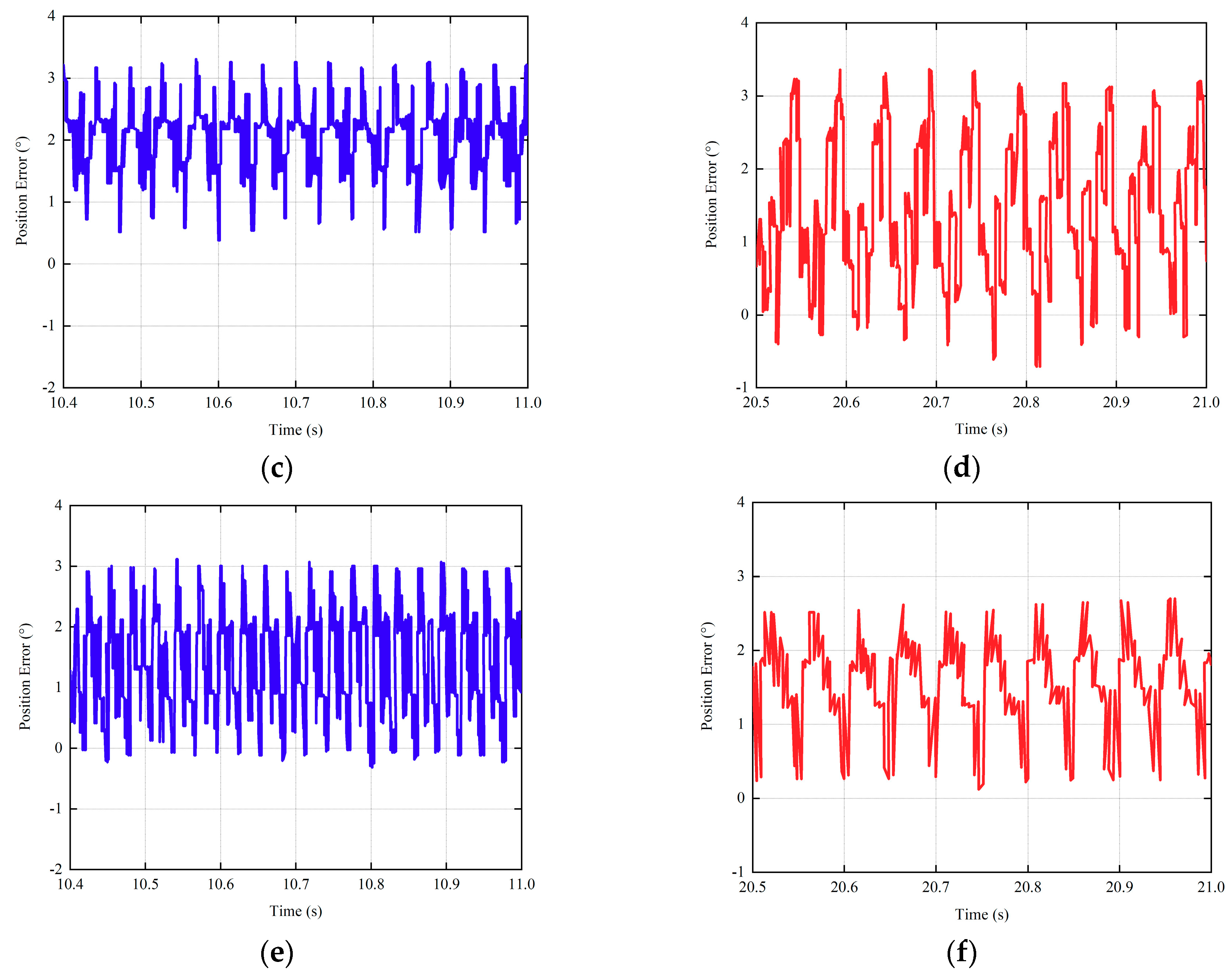
- Finally, the effectiveness and the robustness of the proposed control system are verified. The experimental results show the static and dynamic performance of the new current controller. In the meanwhile, the accuracy of estimated position is proved as well, and the minimum position error can be controlled within ±4° whether the load is given or not.
Author Contributions
Funding
Conflicts of Interest
References
- Zhu, Y.; Xiao, M.; Su, X.; Lu, K.; Wu, Z.; Yang, G. IGBT Junction Temperature Measurement Under Active-Short-Circuit and Locked-Rotor Modes in New Energy Vehicles. IEEE Access 2020, 8, 114401–114412. [Google Scholar] [CrossRef]
- Sul, S.K.; Kwon, Y.C.; Lee, Y. Sensorless control of IPMSM for last 10 years and next 5 years. CES Trans. Elect. Mach. 2017, 1, 91–99. [Google Scholar] [CrossRef]
- Xu, D.; Wang, B.; Zhang, G.; Wang, G.; Yu, Y. A review of sensorless control methods for AC motor drives. CES Trans. Elect. Mach. Syst. 2018, 2, 104–115. [Google Scholar]
- Yeoh, S.S.; Yang, T.; Tarisciotti, L.; Hill, C.I.; Bozhko, S.; Zancheta, P. Permanent-magnet machine-based starter-generator system with modulated model predictive control. IEEE Trans. Transp. Electrific. 2017, 3, 878–890. [Google Scholar] [CrossRef]
- Zhu, Y.; Xiao, M.K.; Lu, K.; Wu, Z.H.; Tao, B. A Simplified Thermal Model and Online Temperature Estimation Method of Permanent Magnet Synchronous Motors. Appl. Sci. 2019, 9, 3158. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Tomita, M.; Doki, S.; Okuma, S. An extended electromotive force model for sensorless control of IPMSM. IEEE Trans. Ind. Electron. 2003, 50, 288–295. [Google Scholar] [CrossRef]
- Qiao, Z.; Shi, T.; Wang, Y.; Yan, Y.; Xia, C.; He, X. New sliding-observer for position sensorless control of permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2013, 60, 710–719. [Google Scholar] [CrossRef]
- Bierhoff, M. A general PLL-type algorithm for speed sensorless control of electrical drives. IEEE Trans. Ind. Electron. 2017, 64, 9253–9260. [Google Scholar] [CrossRef]
- Lee, Y.; Sul, S. Model-Based Sensorless Control of IPMSM Enhancing Robustness Based on the Estimation of Speed Error. In Proceedings of the SLED Conference, Nadi, Fiji, 5–6 June 2016. [Google Scholar]
- Shi, C.; Wang, C. Sensorless vector control of three-phase permanent magnet synchronous motor based on Model-Reference-Adaptive-System. In Proceedings of the 2018 IEEE 4th International Conference on Control Science and Systems Engineering (ICCSSE), Wuhan, China, 21–23 August 2018. [Google Scholar]
- Zhu, G.; Kaddouri, A.; Dessaint, L.; Akhrif, O. A nonlinear state observer for the sensorless control of a permanent-magnet AC-machine. IEEE Trans. Ind. Electron. 2001, 48, 1098–1108. [Google Scholar]
- Yao, Y.; Peng, F.; Huang, Y. Position and capacitor voltage sensorless control of high-speed surface-mounted PMSM drive with output filter. In Proceedings of the ECCE Conference, Portland, OR, USA, 23–27 September 2018. [Google Scholar]
- Li, H.; Wang, Z. Sensorless Control for PMSM Drives Using the Cubature Kalman Filter Based Speed and Flux Observer. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018. [Google Scholar]
- Yang, J.; Mao, Y.; Chen, Y. Sensorless control of permanent magnet synchronous motors with compensation for parameter uncertainty. J. Electr. Eng. Technol. 2017, 12, 1166–1176. [Google Scholar] [CrossRef] [Green Version]
- Mao, Y.; Yang, J.; Yin, D.; Chen, Y. Sensorless interior permanent magnet synchronous motor control with rotational inertia adjustment. SAGE Adv. Mech. Eng. 2017, 9, 1–9. [Google Scholar] [CrossRef]
- Solsona, J.; Valla, M.; Muravchik, C. Nonlinear control of a permanent magnet synchronous motor with disturbance torque estimation. IEEE Trans Energy Convers. 2000, 15, 163–168. [Google Scholar] [CrossRef]
- Yang, S.; Chen, G. High-Speed position-sensorless drive of permanent magnet machine using discrete-time EMF estimation. IEEE Trans. Ind. Electron. 2017, 64, 4444–4453. [Google Scholar] [CrossRef]
- Liu, J.; Gong, C.; Han, Z.; Yu, H. IPMSM model predictive control in flux weakening operation using an improved algorithm. IEEE Trans. Ind. Electron. 2018, 65, 9378–9387. [Google Scholar] [CrossRef]
- Zhang, Z.; Fang, H.; Gao, F.; Rodriguez, J.; Kennel, R. Multiple vector model predictive power control for grid-tied wind turbine system with enhanced steady-state control performance. IEEE Trans. Ind. Electron. 2017, 64, 6287–6298. [Google Scholar] [CrossRef]
- Wang, Y. Deadbeat model-predictive torque control with discrete space-vector modulation for PMSM drives. IEEE Trans. Ind. Electron. 2018, 64, 3537–3547. [Google Scholar] [CrossRef]
- Suul, J.; LjØkelsØy, K.; Midstund, T.; Undeland, T. Synchronous reference frame hysteresis current control for grid converter applications. IEEE Trans. Ind. Electron. 2011, 47, 2183–2194. [Google Scholar] [CrossRef]
- Kazmierkowski, M.; Malesani, L. Current control techniques for three-phase voltage-source PWM converters: A survey. IEEE Trans. Ind. Electron. 1998, 45, 691–793. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-vector-based model predictive torque control without weighting factors for induction motor drives. IEEE Trans. Ind. Electron. 2016, 31, 1381–1390. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Generalized two-vector-based Model predictive torque of induction motor drives. IEEE Trans. Power. Electron. 2015, 29, 6593–6630. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Model Predictive torque control of induction motor drives with optimal duty cycle control. IEEE Trans. Ind. Electron. 2014, 31, 1381–1390. [Google Scholar] [CrossRef]
- Liu, H.; Li, S. Speed control for PMSM servo system using predictive functional control and extended state observer. IEEE Trans. Ind. Electron. 2012, 59, 1171–1183. [Google Scholar] [CrossRef]
- Guzinski, J.; Aburub, H. Speed seneorless induction motor drive with predictive current controller. IEEE Trans. Ind. Electron. 2013, 60, 699–799. [Google Scholar] [CrossRef]
- Niu, L.; Yang, M.; Xu, D. An adaptive robust model predictive current control for PMSM with online inductance identification. Int. Rev. Elect. Eng. 2012, 7, 3845–3856. [Google Scholar]
- Chen, W.; Ballance, D.; Gawthrop, P.J.; Gribble, J.J.; O’Reilly, J. Design of a prediction-accuracy-enhanced continuous-time MPC for disturbed system via a disturbance observer. IEEE Trans. Ind. Electron. 2015, 62, 5807–5816. [Google Scholar]
- Wipasuramonton, P.; Zhu, Z.; Howe, D. Predictive current control with current-error correction for PM brushless AC drives. IEEE Trans. Ind. Appl. 2006, 42, 1071–1079. [Google Scholar] [CrossRef]
- Lehuy, H.; Slimani, K.; Viarouge, P. Analysis and implementation of a real-time predictive current controller for permanent-magnet synchronous servo drives. IEEE Trans. Ind. Electron. 1994, 41, 110–117. [Google Scholar]
- Tong, L. An SRF-PLL-based sensorless vector control using the predictive deadbeat algorithm for the direct-driven permanent magnet synchronous generator. IEEE Trans. Power. Electron. 2014, 29, 2837–2849. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| 0.322 mH | |
| 0.322 mH | |
| 0.011 Wb | |
| 0.0113 Ω | |
| 4 | |
| 36 V | |
| 1.27 N·m | |
| 0.002 kg·m2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Tao, B.; Xiao, M.; Yang, G.; Zhang, X.; Lu, K. Luenberger Position Observer Based on Deadbeat-Current Predictive Control for Sensorless PMSM. Electronics 2020, 9, 1325. https://doi.org/10.3390/electronics9081325
Zhu Y, Tao B, Xiao M, Yang G, Zhang X, Lu K. Luenberger Position Observer Based on Deadbeat-Current Predictive Control for Sensorless PMSM. Electronics. 2020; 9(8):1325. https://doi.org/10.3390/electronics9081325
Chicago/Turabian StyleZhu, Yuan, Ben Tao, Mingkang Xiao, Gang Yang, Xingfu Zhang, and Ke Lu. 2020. "Luenberger Position Observer Based on Deadbeat-Current Predictive Control for Sensorless PMSM" Electronics 9, no. 8: 1325. https://doi.org/10.3390/electronics9081325