Nested High Order Sliding Mode Controller with Back-EMF Sliding Mode Observer for a Brushless Direct Current Motor


Abstract
:
1. Introduction
2. Brushless Direct Current Motor Modeling
2.1. Mathematical Modeling of the BLDC Motor in Natural Variables
2.2. Mathematical Model of the BLDC Motor in Reference Frame
2.3. Mathematical Model of the BLDC Motor in Reference Frame
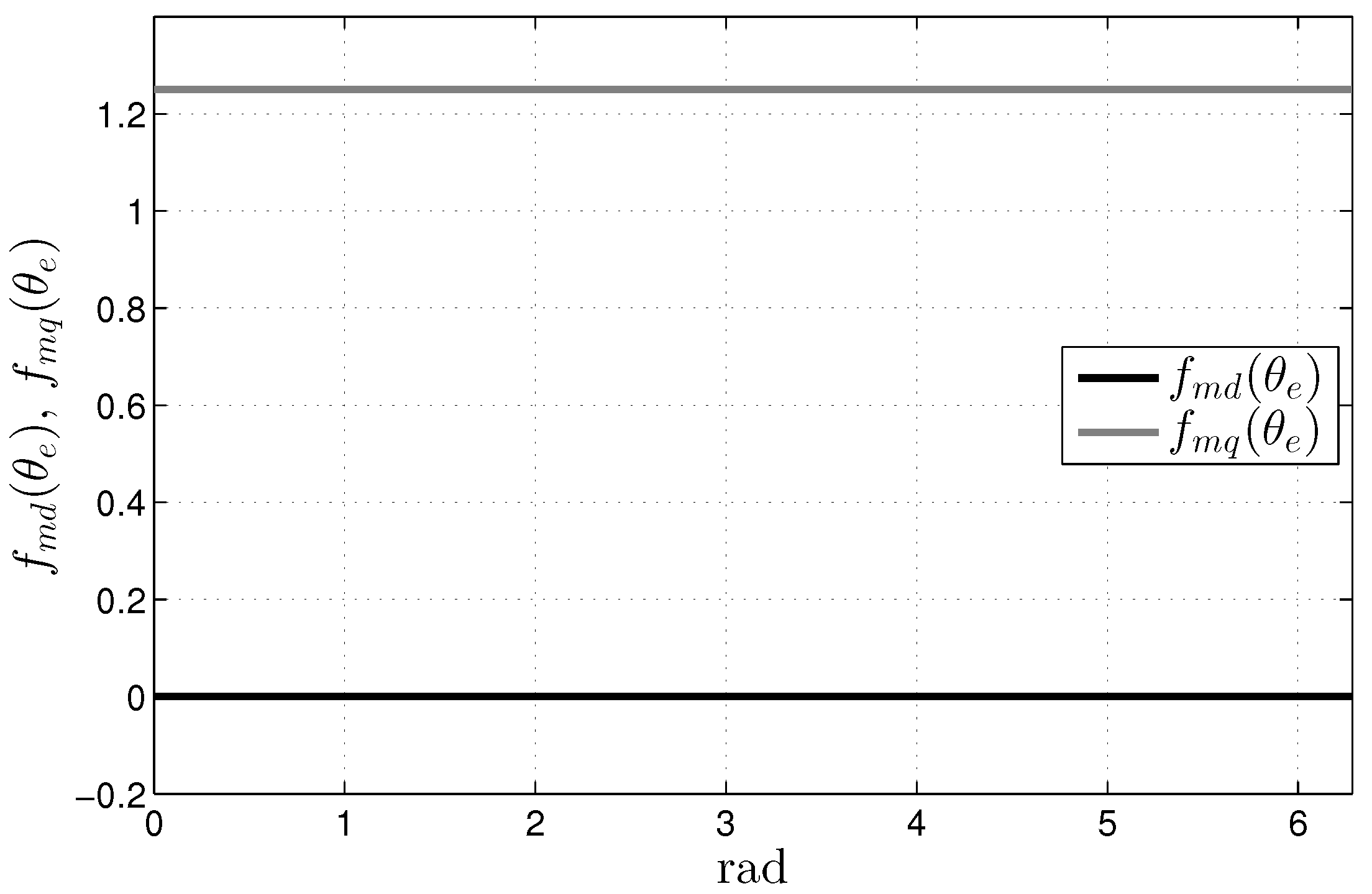
2.4. Mathematical Model of the BLDC Motor in Modified- Reference Frame
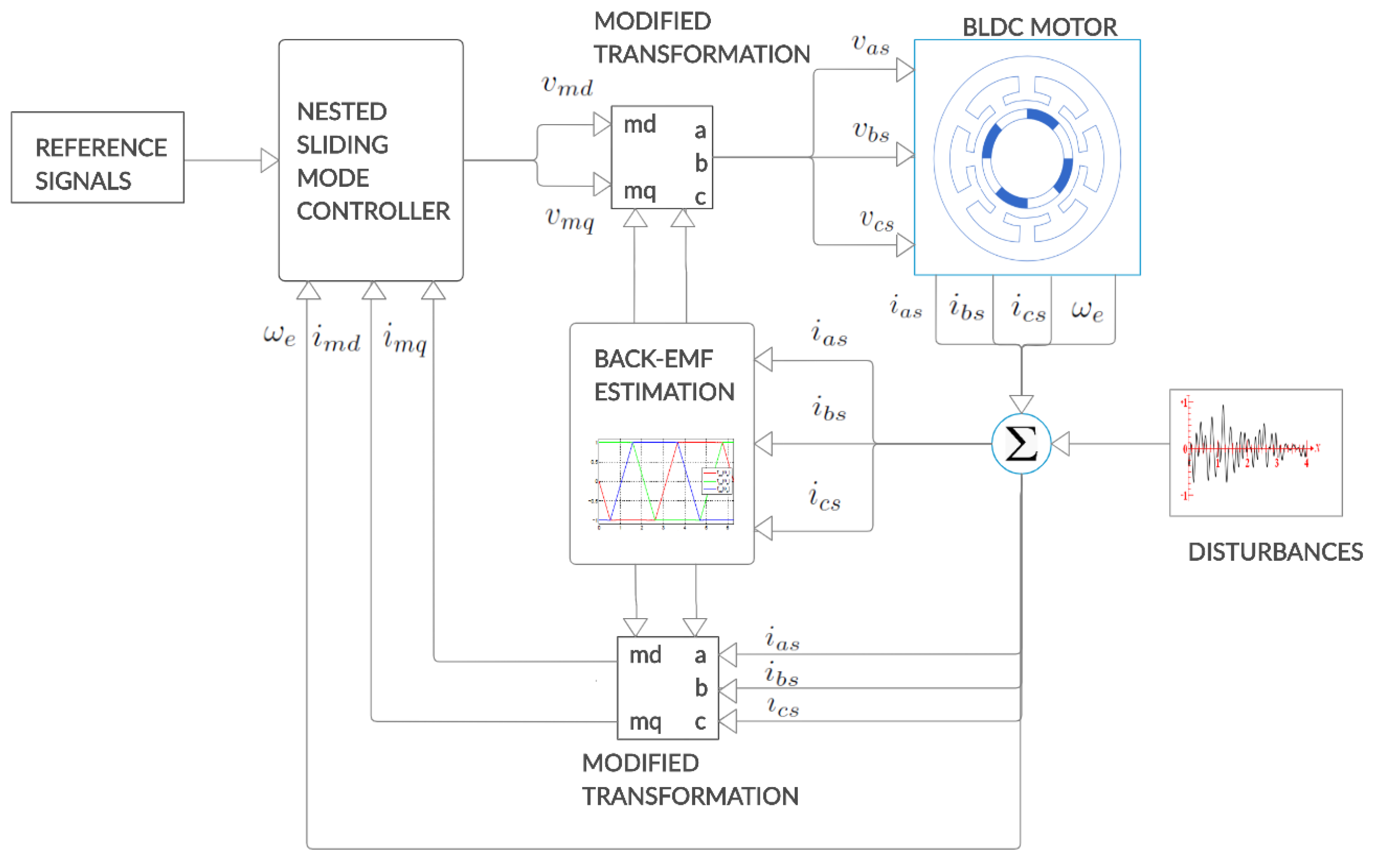
3. Back-EMF Observer and Controller Design
3.1. Sliding Mode Back-EMF Observer Design
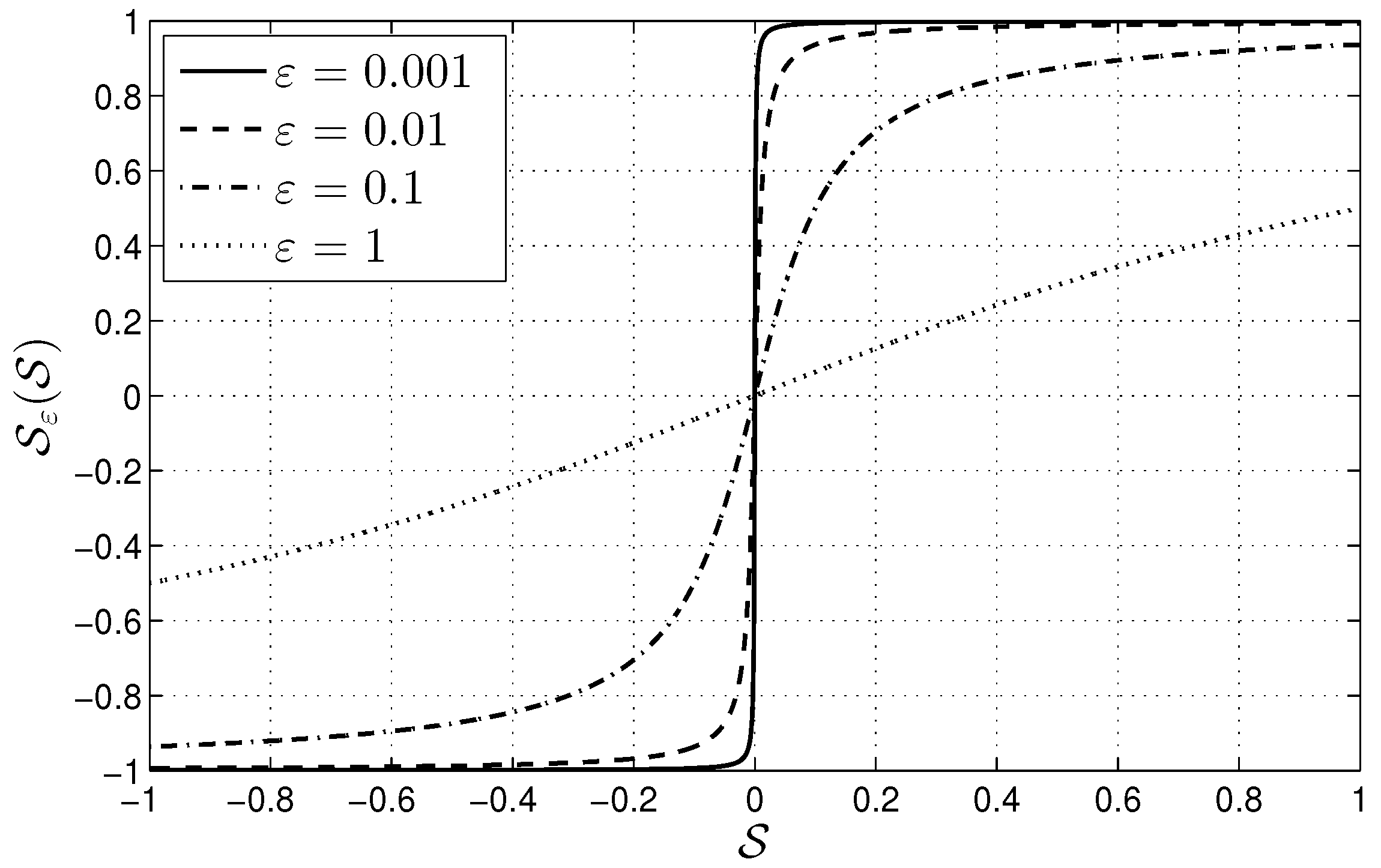
3.2. Nested High Order Sliding Mode Control Design
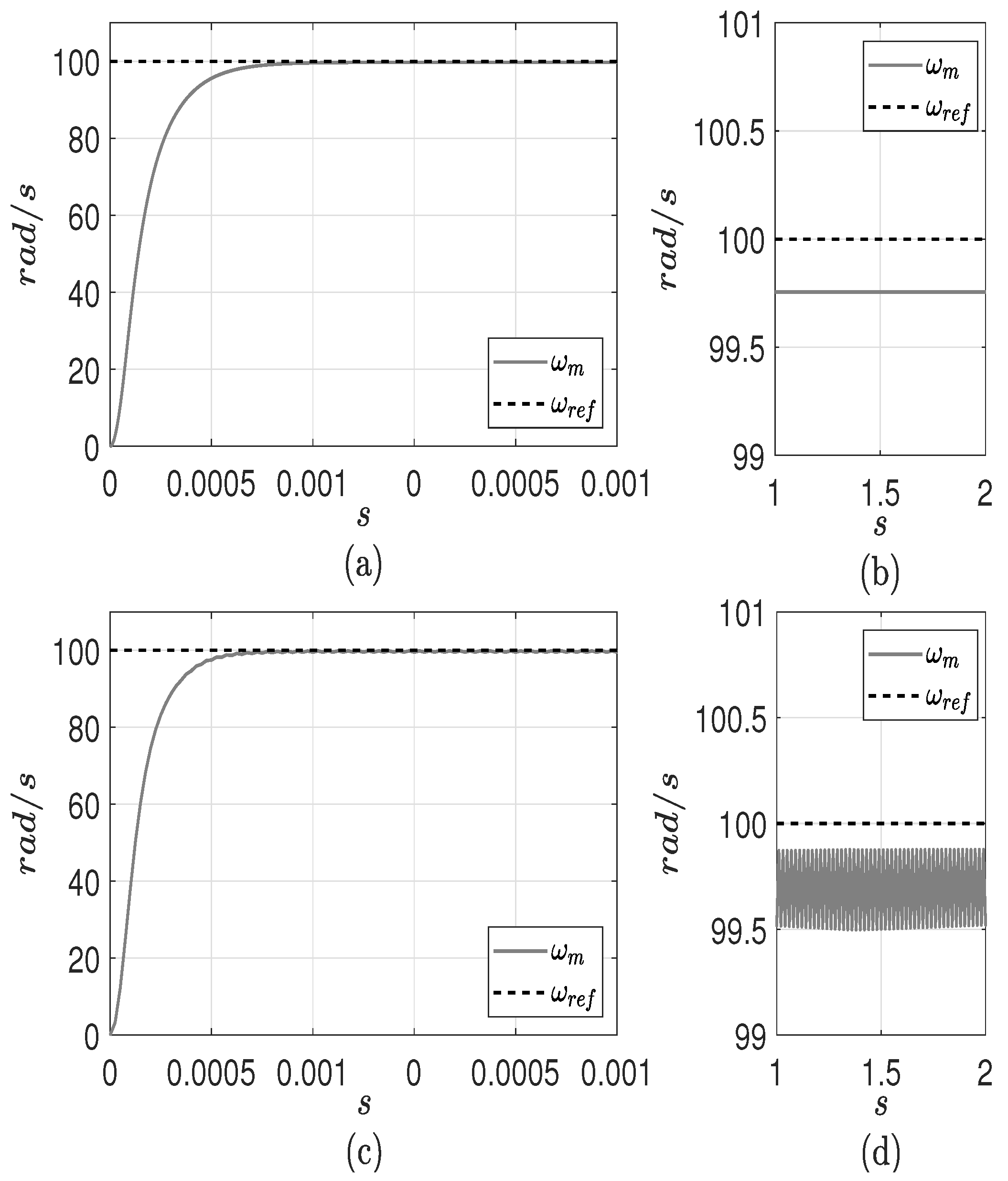
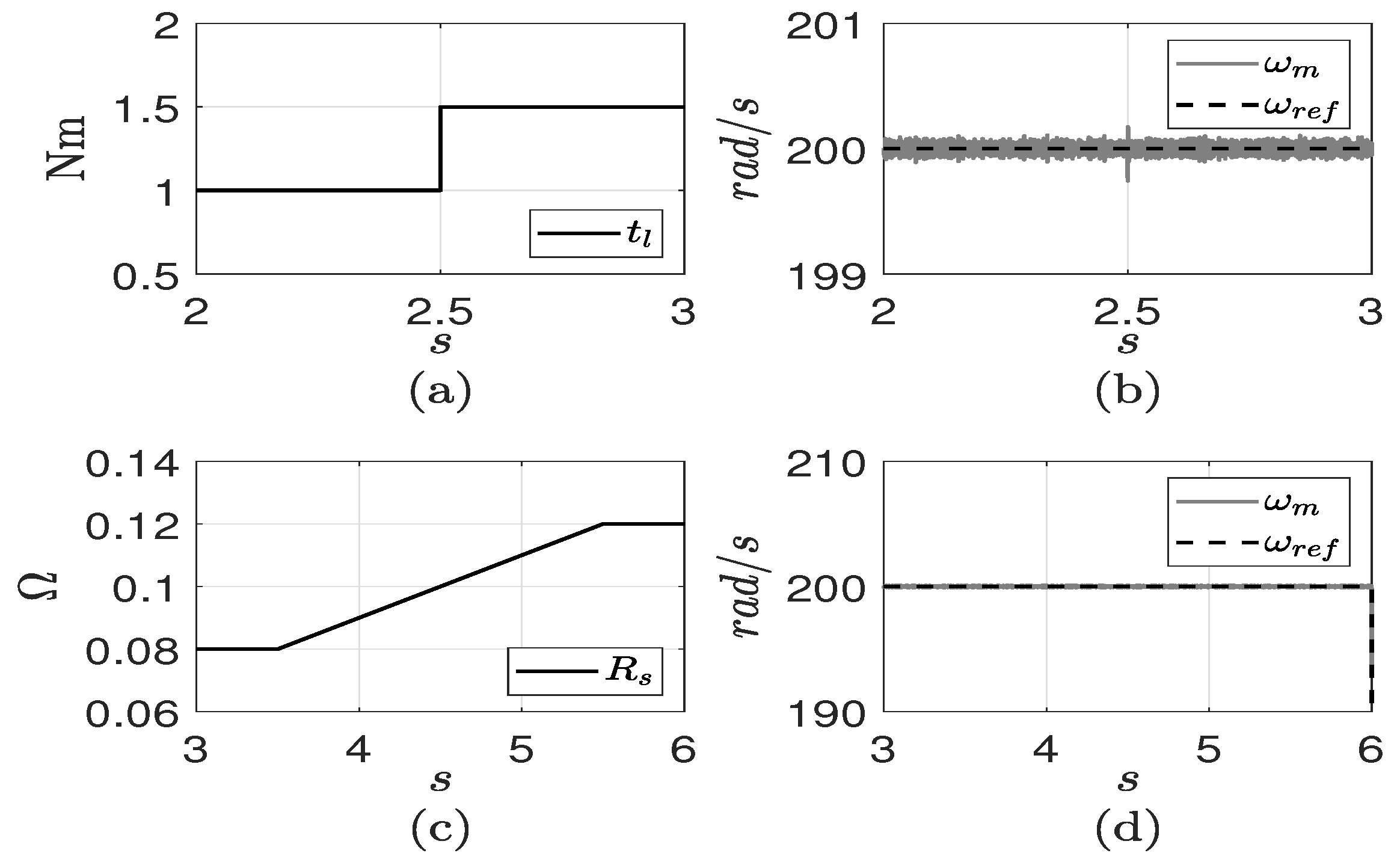
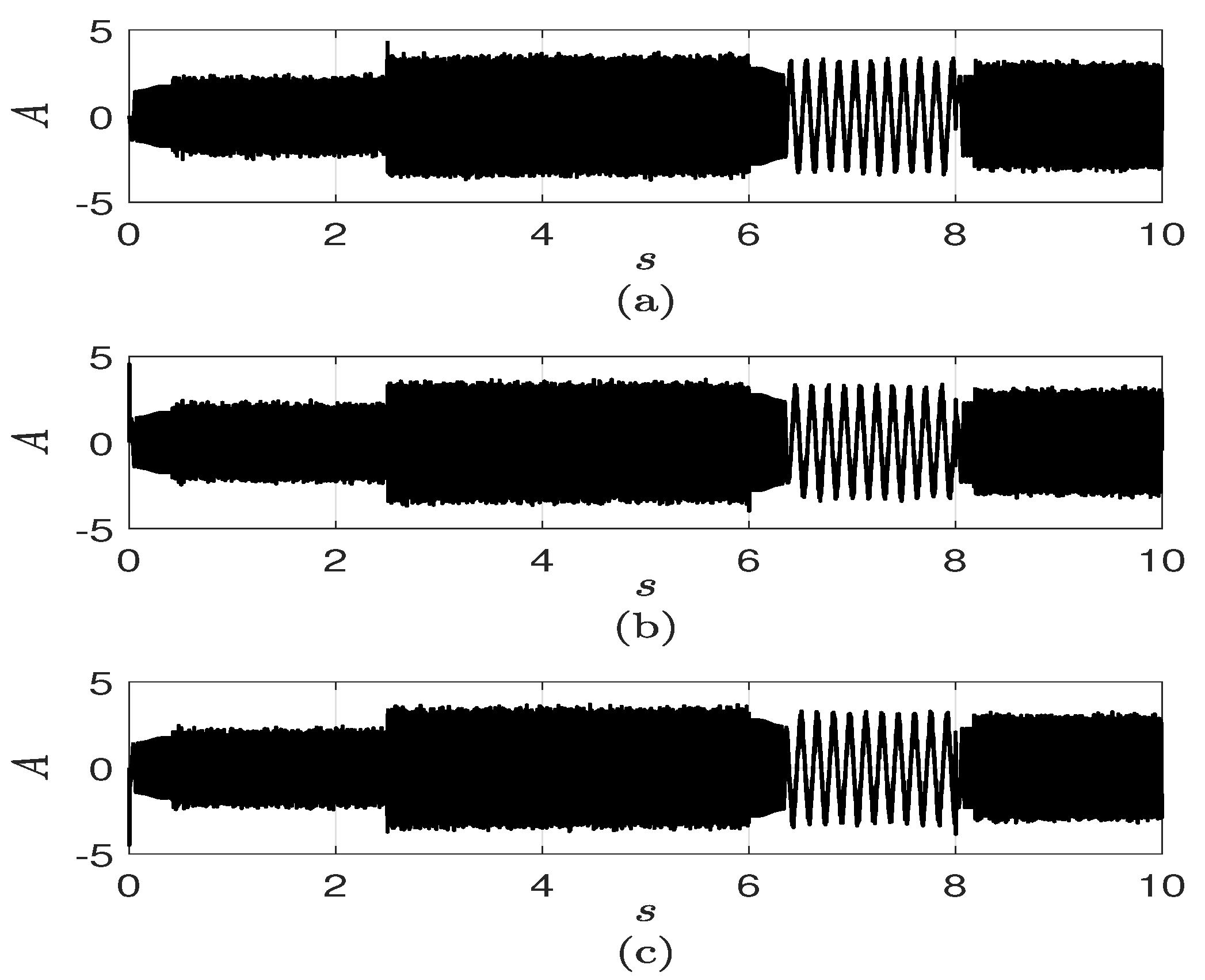
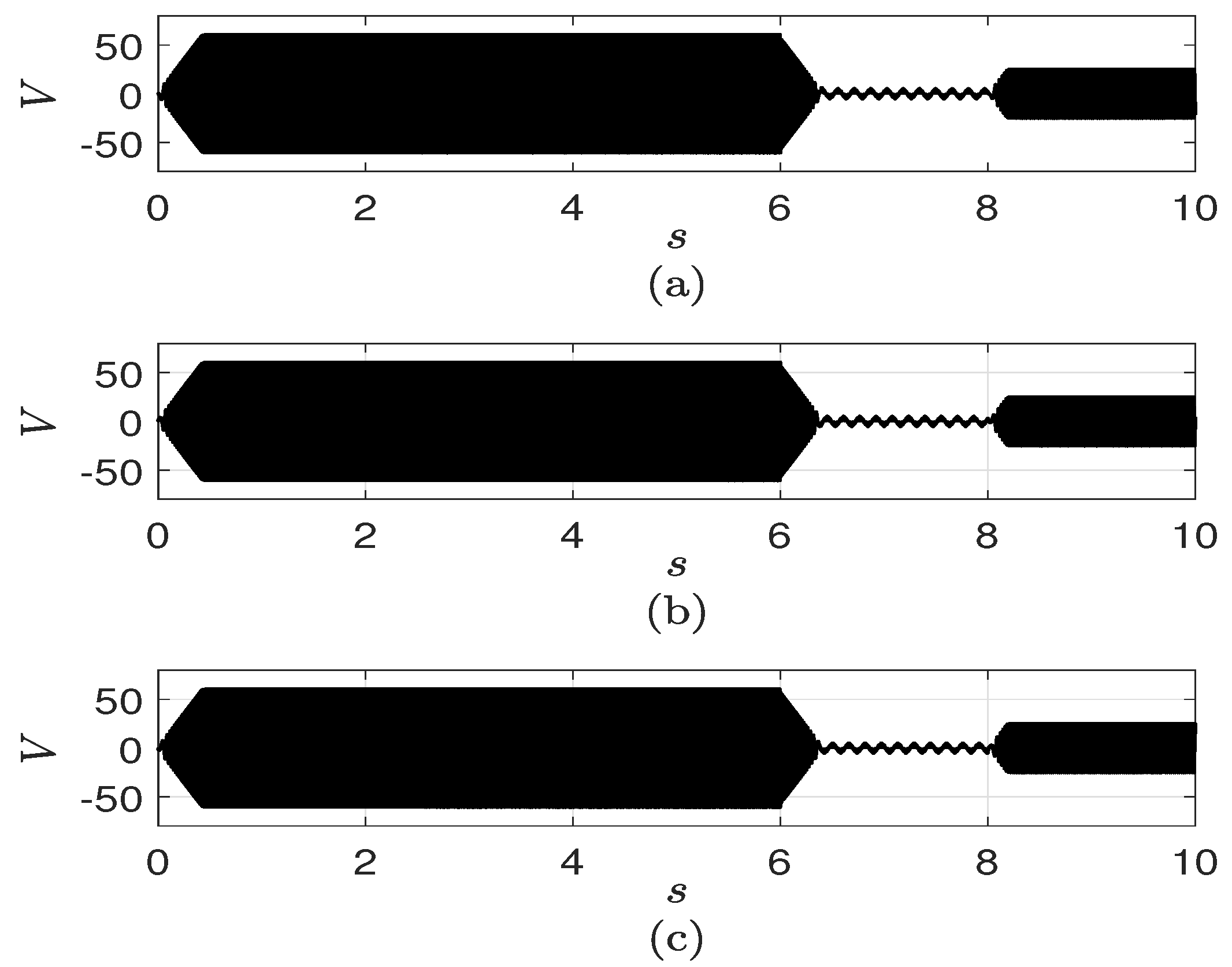
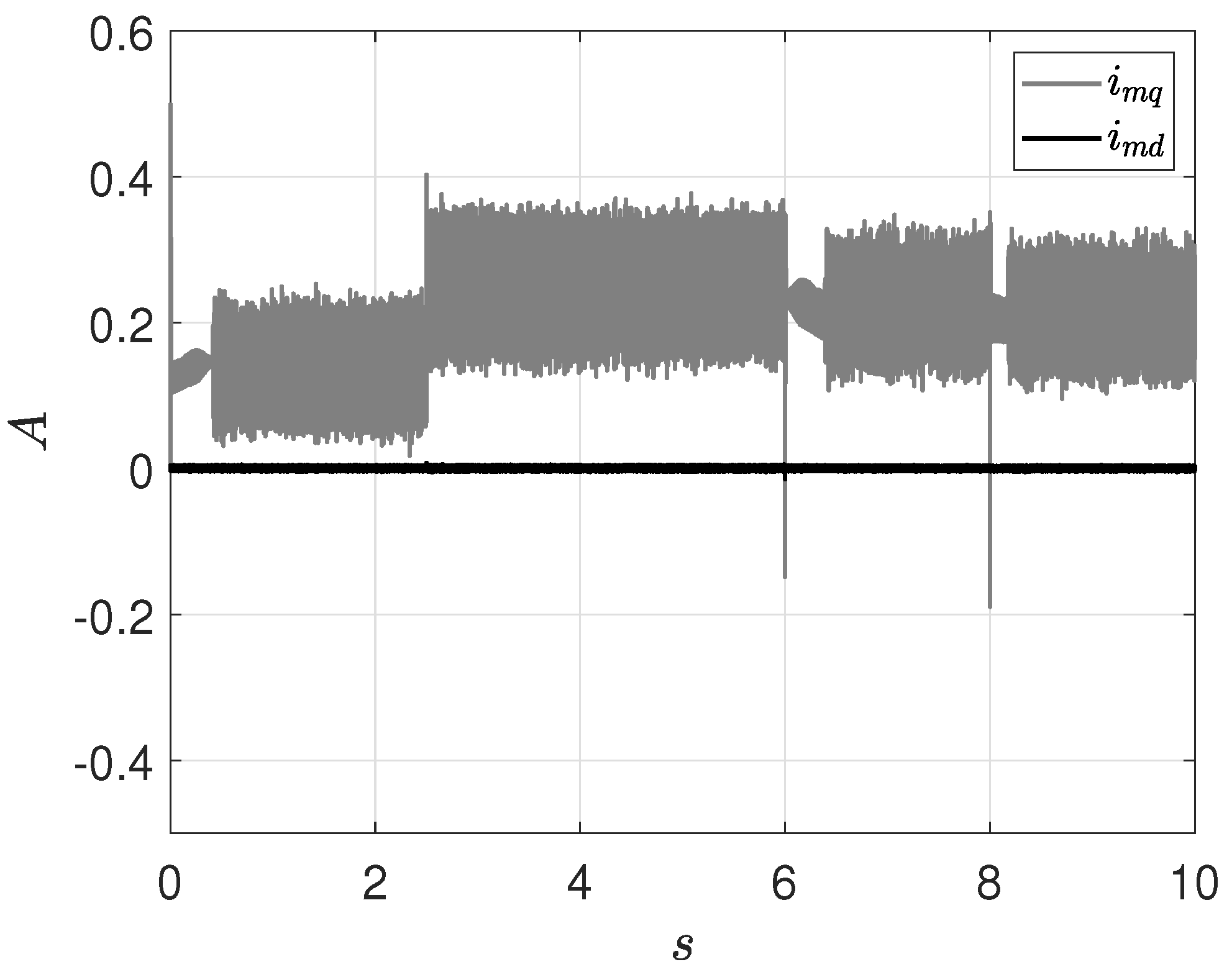
4. Simulation Results
5. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BLDC | Brushless Direct Current Motor |
| EMF | Electromotive force |
| PMSM | Permanent Magnet Synchronous Motor |
References
- Hughes, A.; Drury, B. Electric Motors and Drives Fundamentals, Types and Applications; Elsevier/Newnes: Waltham, MA, USA, 2013. [Google Scholar]
- Krause, P.; Wasynczuk, O.; Sudhoff, S.; Pekarek, S. Electric Motors and Drives Fundamentals, Types and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 2013. [Google Scholar]
- Quintero-Manríquez, E.; Félix, R.A. Second-order sliding mode speed controller with anti-windup for BLDC motors. In Proceedings of the 2014 World Automation Congress (WAC), Waikoloa, HI, USA, 3–7 August 2014; pp. 610–615. [Google Scholar]
- Gujjar, M.N.; Kumar, P. Comparative analysis of field oriented control of BLDC motor using SPWM and SVPWM techniques. In Proceedings of the 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information Communication Technology (RTEICT), Bangalore, India, 19–20 May 2017; pp. 924–929. [Google Scholar]
- Sharma, P.K.; Sindekar, A.S. Performance analysis and comparison of BLDC motor drive using PI and FOC. In Proceedings of the 2016 International Conference on Global Trends in Signal Processing, Information Computing and Communication (ICGTSPICC), Jalgaon, India, 22–24 December 2016; pp. 485–492. [Google Scholar]
- Yousef, A.Y.; Abdelmaksoud, S.M. Review on Field Oriented Control of Induction Motor. Int. J. Res. Emerg. Sci. Technol. (IJREST) 2015, 2, 5–16. [Google Scholar]
- Kshirsagar, P.; Krishnan, R. Efficiency improvement evaluation of non-sinusoidal back-EMF PMSM machines using field oriented current harmonic injection strategy. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 471–478. [Google Scholar]
- Lazor, M.; Štulrajter, M. Modified field oriented control for smooth torque operation of a BLDC motor. In Proceedings of the 2016 Journal of Electrical Systems and Information Technology, Rajecke Teplice, Slovakia, 19–20 May 2014; pp. 180–185. [Google Scholar]
- Devendra, P.; Alice, M.K.; Saibabu, C. Design and implementation methodology for rapid control prototyping of closed loop speed control for BLDC motor. J. Electr. Syst. Inf. Technol. 2018, 5, 99–111. [Google Scholar]
- Suganthi, P.; Nagapavithra, S.; Umamaheswari, S. Modeling and simulation of closed loop speed control for BLDC motor. In Proceedings of the 2017 Conference on Emerging Devices and Smart Systems (ICEDSS), Tiruchengode, India, 3–4 March 2017; pp. 229–233.
- Wang, H.; Li, P.; Shu, Y.; Kang, D. Double closed loop control for BLDC based on whole fuzzy controllers. In Proceedings of the 2017 2nd IEEE International Conference on Computational Intelligence and Applications (ICCIA), Beijing, China, 8–11 September 2017; pp. 487–491. [Google Scholar]
- Walekar, V.R.; Murkute, S.V. Speed Control of BLDC Motor using PI and Fuzzy Approach: A Comparative Study. In Proceedings of the 2018 International Conference on Information, Communication, Engineering and Technology (ICICET), Pune, India, 29–31 August 2018; pp. 1–4. [Google Scholar]
- Shao, Y.; Yang, R.; Guo, J.; Fu, Y. Sliding mode speed control for brushless DC motor based on sliding mode torque observer. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2466–2470. [Google Scholar]
- Delpoux, R.; Lin-Shi, X.; Brun, X. Torque ripple reductions for non-sinusoidal BEMF Motor: An observation based control approach. IFAC-PapersOnLine 2017, 50, 15766–15772. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 180–185. [Google Scholar] [CrossRef]
- Utkin, V. Variable structure systems with sliding modes. IEEE Trans. Autom. Control 1977, 22, 212–222. [Google Scholar] [CrossRef]
- Castillo, B.; di Gennaro, S.; Loukianov, A.; Rivera, J. Robust Nested Sliding Mode Regulation with Application to Induction Motors. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 5242–5247. [Google Scholar]
- Munoz-Gomez, G.; Alanis, A.Y.; Rivera, J. Nested High Order Sliding Mode Controller Applied to a Brushless Direct Current Motor. IFAC-PapersOnLine 2018, 51, 174–179. [Google Scholar] [CrossRef]
- Shao, Y.; Wang, B.; Yu, Y.; Dong, Q.; Tian, M.; Xu, D. An Integral Sliding Mode Back-EMF Observer for Position-Sensorless Permanent Magnet Synchronous Motor Drives. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Liu, D.; Zhang, Y.; Pan, L. Back-EMF Estimation Based on Extended Kalman Filtering in Application of BLCD Motor. In Electrical, Information Engineering and Mechatronics; Wang, X., Wang, F., Zhong, S., Eds.; Lecture Notes in Electrical Engineering; Springer: London, UK, 2011; Volume 138, pp. 1955–1967. [Google Scholar]
- Wang, T. An EMF Observer for PMSM Sensorless Drives Adaptive to Stator Resistance and Rotor Flux Linkage. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 1899–1913. [Google Scholar] [CrossRef]
- Khorrami, F.; Krishnamurthy, P.; Melkote, H. Modeling and Adaptive Nonlinear Control of Electric Motors; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Krishnan, R. Permanent Magnet Synchronous and Brushless DC Motor Drives; CRC Pres: Boca Raton, FL, USA, 2010. [Google Scholar]
- Utkin, V.I.; Guldner, J.; Shi, J. Sliding Mode Control in Electromechanical Systems; Taylor & Francis Ltd.: Philadelphia, PA, USA, 1999. [Google Scholar]
- Di Gennaro, S.; Rivera, J.; Castillo-Toledo, B. Super-twisting sensorless control of permanent magnet synchronous motors. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 4018–4023. [Google Scholar]
- Moreno, J.A.; Osorio, M. A Lyapunov approach to second-order sliding mode controllers and observers. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar]
- Di Gennaro, S.; Domínguez, J.R.; Meza, M.A. Sensorless High Order Sliding Mode Control of Induction Motors With Core Loss. IEEE Trans. Ind. Electron. 2014, 61, 2678–2689. [Google Scholar] [CrossRef]
- Domínguez, J.R.; Navarrete, A.; Meza, M.A.; Loukianov, A.G.; Cañedo, J. Digital Sliding-Mode Sensorless Control for Surface-Mounted PMSM. IEEE Trans. Ind. Inform. 2014, 10, 137–151. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Stator phase resistence | 80 m | |
| Stator phase inductance | 0.15 mH | |
| Number of poles | p | 8 |
| Nominal voltage | 48 V | |
| Rotor inertia | J | 0.00024 |
| BEMF constant | 0.1098 Vs/rad |
| Back-EMF Type | Precision Error | Chattering |
|---|---|---|
| Sinusoidal | 0.1% | 0.2% |
| Trapezoidal | 0.05% | ≈0% |
| Parameter | Symbol | Value |
|---|---|---|
| Observer gain | 6000 | |
| Observer gain | 2000 | |
| Observer gain | 6000 | |
| Observer gain | 2000 | |
| Controller gain | 2000 | |
| Controller gain | 2500 | |
| Controller gain | 35,000 | |
| Controller gain | 2500 | |
| Controller gain | 35,000 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alanis, A.Y.; Munoz-Gomez, G.; Rivera, J. Nested High Order Sliding Mode Controller with Back-EMF Sliding Mode Observer for a Brushless Direct Current Motor. Electronics 2020, 9, 1041. https://doi.org/10.3390/electronics9061041
Alanis AY, Munoz-Gomez G, Rivera J. Nested High Order Sliding Mode Controller with Back-EMF Sliding Mode Observer for a Brushless Direct Current Motor. Electronics. 2020; 9(6):1041. https://doi.org/10.3390/electronics9061041
Chicago/Turabian StyleAlanis, Alma Y., Gustavo Munoz-Gomez, and Jorge Rivera. 2020. "Nested High Order Sliding Mode Controller with Back-EMF Sliding Mode Observer for a Brushless Direct Current Motor" Electronics 9, no. 6: 1041. https://doi.org/10.3390/electronics9061041