1. Introduction
Due to escalation in environmental pollution and energy prices, electric vehicles (EVs) have been widely explored in the past few years. Battery electric vehicles (BEVs), plug-in hybrid electric vehicles (PHEVs), and fuel cell electric vehicles (FCEVs) are the different variants of EVs [
1]. According to a report [
2], the annual sale of EVs is anticipated to be almost 100 million at the end of the year 2050. These EVs consist of energy storage and the motor system as the secondary or main energy source (FCEVs and PHEVs) or the sole energy source (BEVs) [
3]. Sodium sulphur (NaS) batteries, sodium nickel chloride (NaNiCl), vanadium redox flow batteries (VRFB), zinc bromine flow batteries (ZBFB), lead-acid batteries, lithium-ion batteries (LIBs), and nickel metal hydride batteries (NiMH) can be used as an energy storage system (ESS) in EVs [
4,
5]. The LIBs have the most promising features like high energy and power density, lightweight, low self-discharge rate, long life span, and better efficiency as compared to others [
5]. The LIB is not only the weightiest onboard ESS for EVs [
6,
7] but also an integral part of the smart grid [
8,
9]. An advanced battery management system (BMS) is needed to ensure safe, reliable, and efficient operation of LIB in EVs, which can measure/estimate state of charge (SOC), state of health (SOH), and state of power (SOP) with high accuracy [
10,
11].
Assortments of methodologies can be found in the literature to estimate the SOC of the LIB. Each methodology has its own supremacy and lapses [
10]. In model-based techniques, the identification of model parameters and SOC estimation are key indicators in a BMS to protect the LIB. The SOC estimation accuracy mainly relies on the operational conditions, battery aging, modeling error, and measurement uncertainty. He et al. [
12] proposed an improved second order RC model to tackle the effects of different charging and discharging rates on the cell capacity. They used an adaptive extended Kalman filter (AEKF) to estimate the SOC. The Lagrange multiplier method was adopted to find the parameters of battery model under different current variations [
13]. In other studies [
14,
15,
16], the effects of temperature variation have been considered to develop a temperature compensated model to estimate the SOC of LIB. Wang et al. [
17] proposed a joint estimator to measure the SOC and available energy of LIB. They jointly considered the effects of temperature and different charge/discharge rates to estimate the states using particle filter (PF). In [
18], the authors implemented the unscented Kalman filter (UKF) with an improved battery model to observe the effects of temperature variation and charge/discharge rate. Zheng et al. [
19] considered the effect of battery aging to estimate the SOC accurately. The experimental results show the accuracy of their proposed methodology. Chaoui et al. [
20] proposed a time-delayed neural network method to estimate the SOC and SOH of the LIB. Battery temperature, voltage, and current values were the input of the estimator. Their presented methodology compensated the nonlinear battery degradation due to aging. Xiong et al. [
21] proposed a battery model against different aging level of batteries. Their experimental results show the effectiveness and accuracy of the proposed model at different aging levels at 1 s sampling time. The estimation error of their proposed approach was less than 2%. In [
22], the authors thoroughly investigate the different sources of errors in online SOC estimation methods.
The effects of sensor sensitivity on the modeling parameters and SOC estimation remain an emerging research area. A temperature-compensated battery model was developed to find the parameters at different temperatures [
23]. A dual PF was proposed to estimate the SOC and drift current to eliminate the drift-noise error. They added a static parameter in a temperature-compensated model to address the issue of drift current. The results reveal that their proposed model has maximum errors of 2.83% and 5.11% at 0.15% current drift and 45 °C respectively. In [
24], a nonlinear observer to estimate the SOC of LIB was designed, and it shows that the estimation error did not exceed 4.5% in the presence of voltage and current sensor errors of 2.5% and 5% respectively.
The measuring current/voltage sensor error can be divided into two groups: Fixed errors and random errors. The fixed error is a static value which can add into measured value at any given time. This error can be tackled easily by calibrating the resultant measured value. A random error primarily induced by the resolution of voltage/current sensors [
25]. Lai et al. [
26] compared different equivalent circuit models for estimating the SOC. They added fixed voltage and current drift error to analyze the effects on SOC estimation. The increase of 35.5% and 37.8% in estimation error was observed at 0.1 A uncertainty in first and second order battery models respectively. The effects of sensor error and sampling time on states estimation of LIB was studied in [
27]. The authors used a first order RC circuit in their work. The maximum noted estimation error was 1.72% at 0.1 s sampling time.
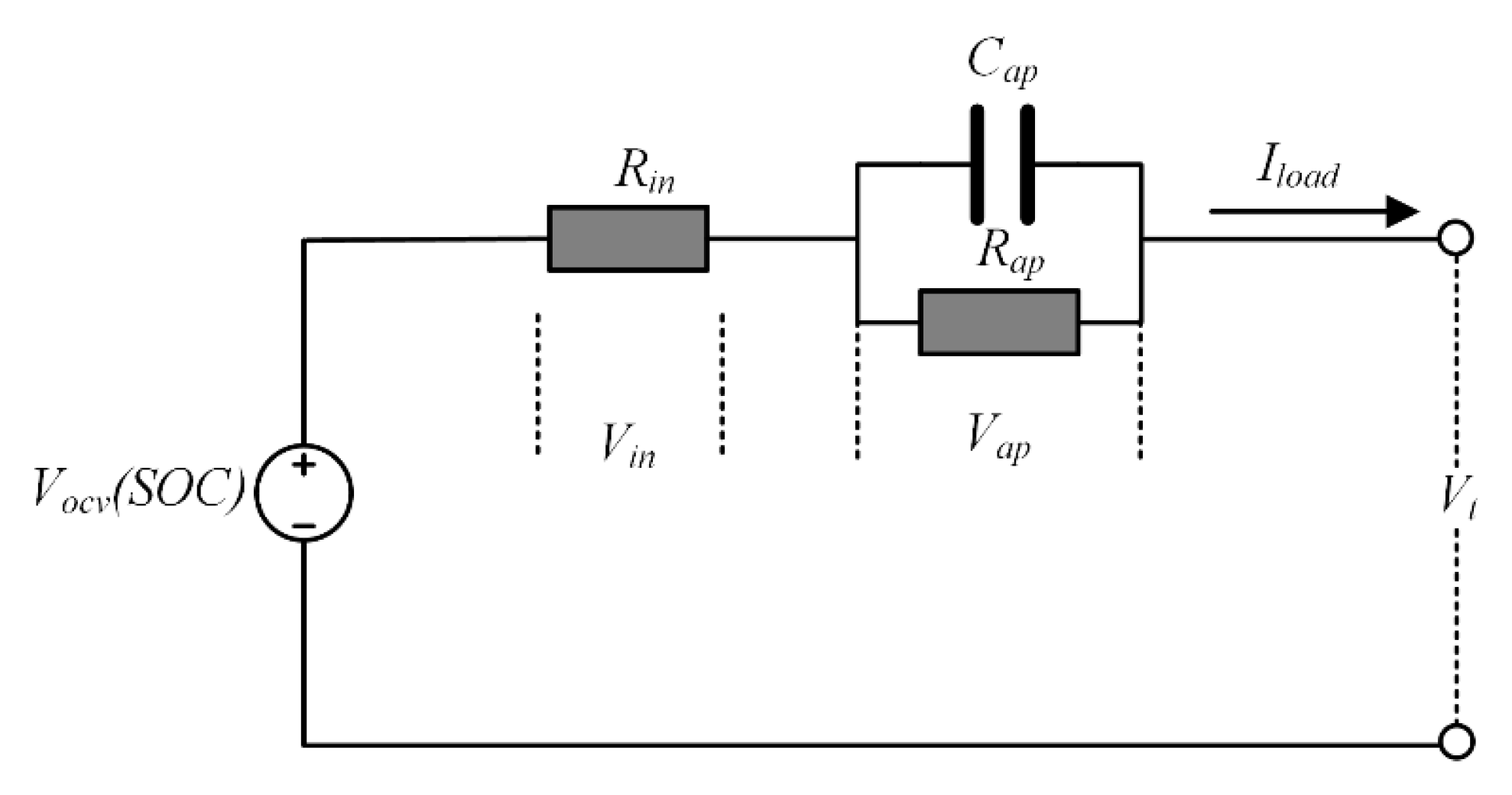
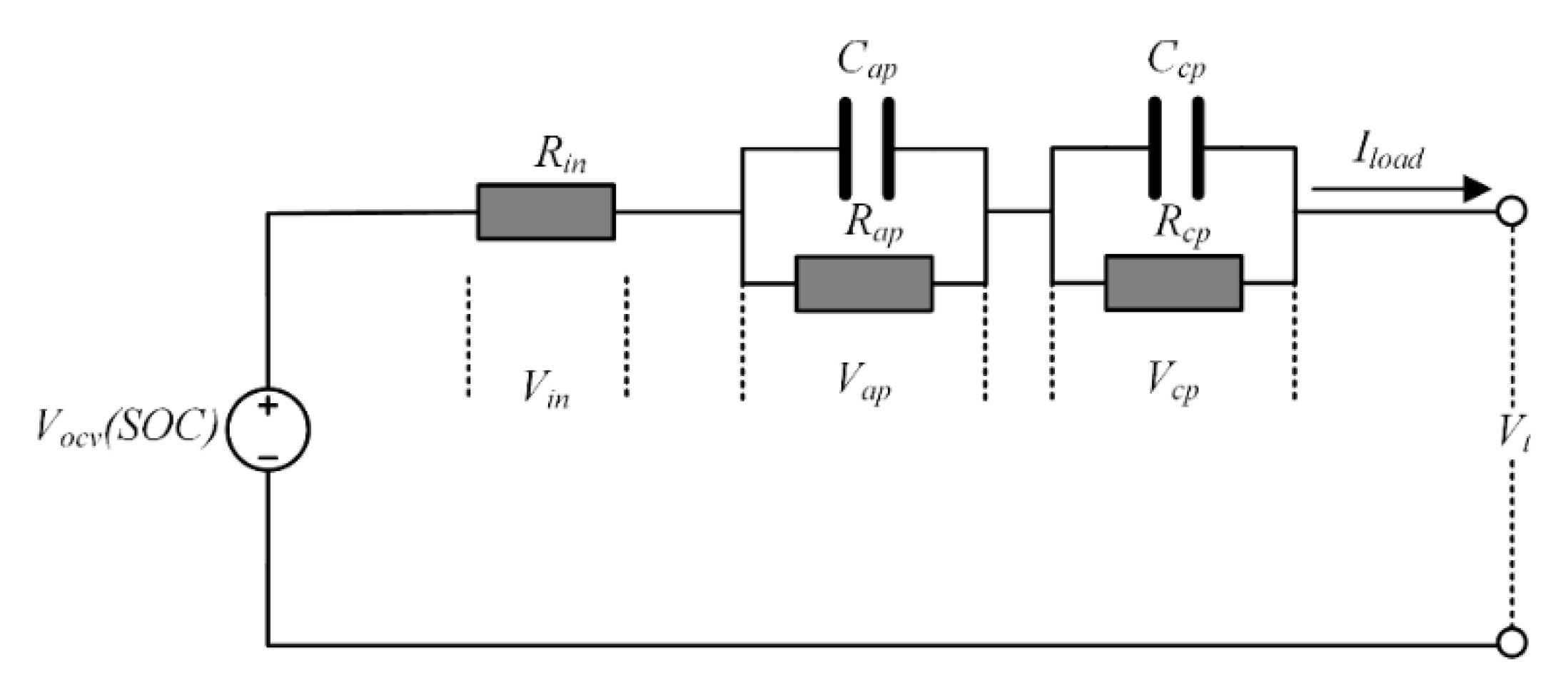
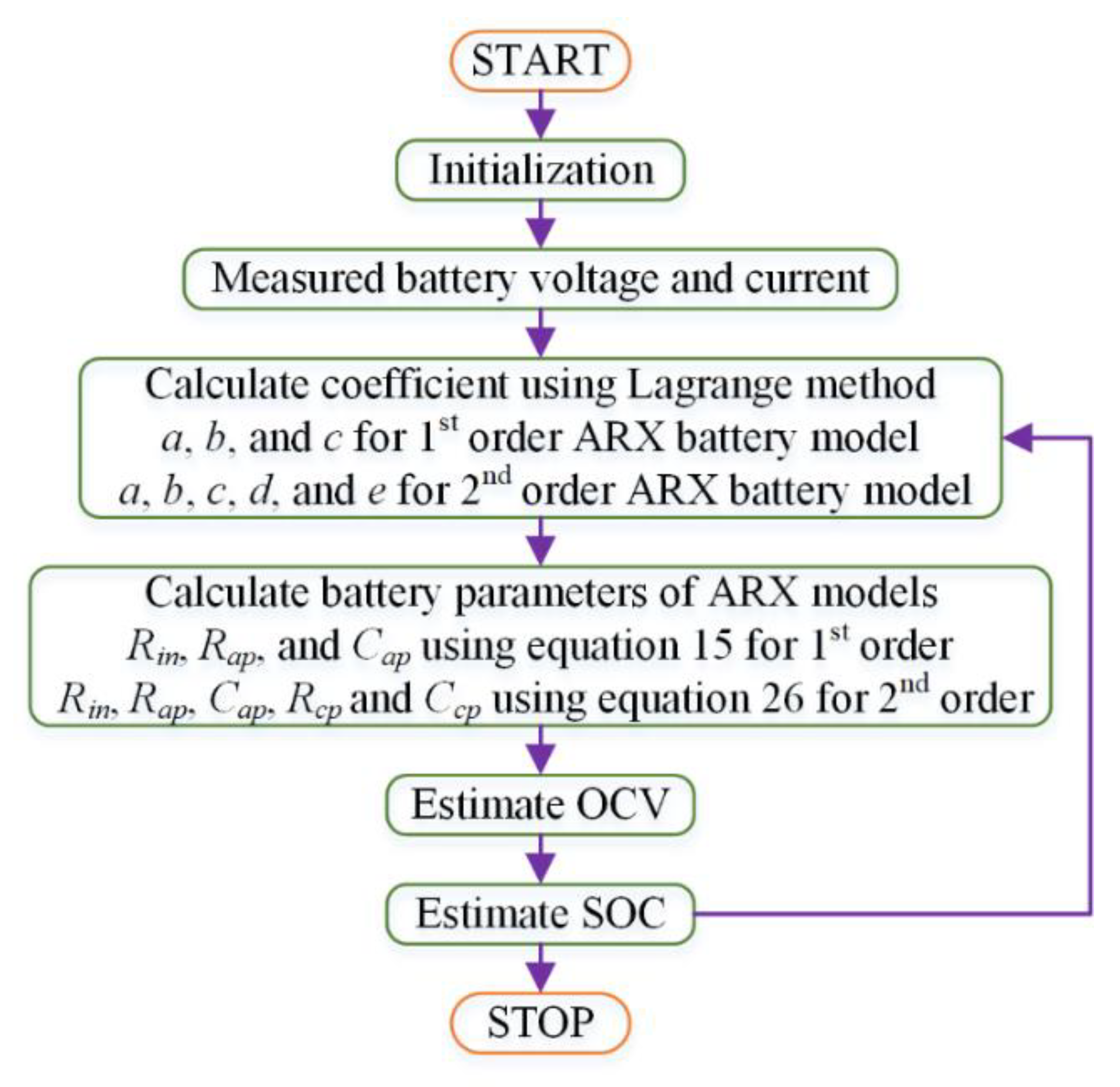
In this paper, the sensor sensitivity analysis is evaluated to observe the sensor precision effects on identified battery model parameters and estimated SOC. The experiment is performed to determine the OCV-SOC relationship. The Lagrange multiplier method is adopted to determine the online battery parameters and SOC of the first and second order RC autoregressive exogenous (ARX) battery model. The sensitivity analysis is carried out for these scenarios: Current sensor precision of ±5 mA, ±50 mA, ±100 mA, and ±500 mA and voltage sensor precision of ±1 mV, ±2.5 mV, ±5 mV, and ±10 mV. The comparative analysis of the models under the perturbed environment has been carried out to draw some insightful results.
4. Experimental Setup and Estimated SOC
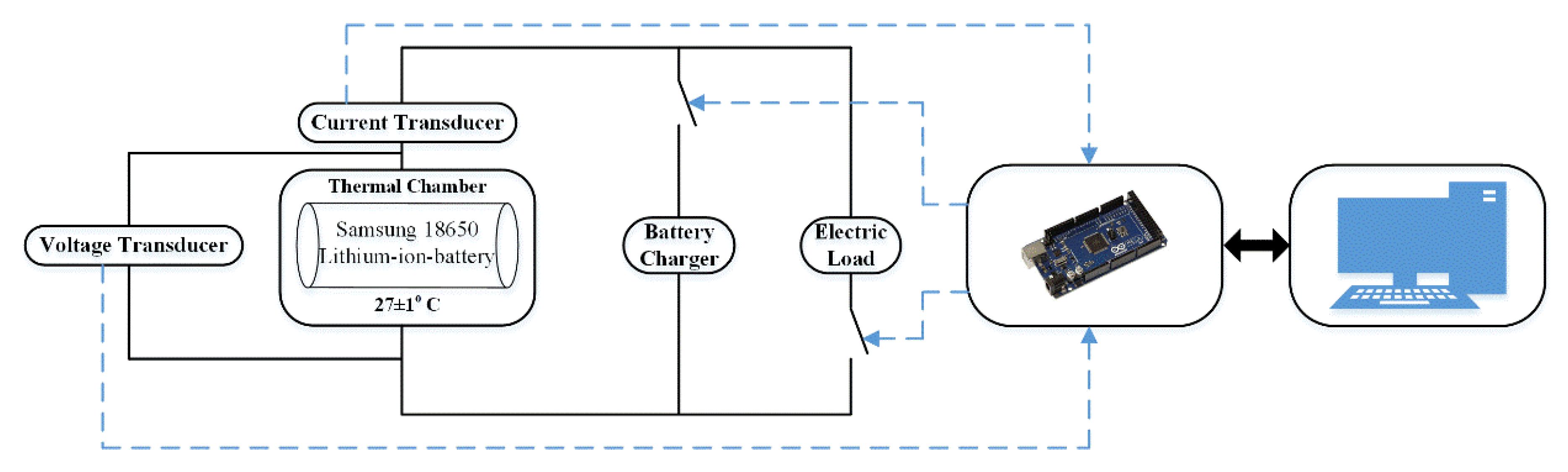
The experimental test configuration system is shown in
Figure 4. The LIB was placed inside a thermal chamber to maintain the battery temperature at 27 ± 1 °C. The voltage and current transducer were used to measure and monitor terminal voltage and charge/discharge current at 1 s sample time. The transducers have a maximum measuring error of 0.25%. The Arduino mega 2560 interfaced with MATLAB
TM was used to control the charging and discharging of LIB.
The main specification of LIB used in this research work is listed in
Table 1.
The OCV test for Samsung ICR18650-26F LIB cell was performed as mentioned in [
37]. The average OCV of the charge and discharge cycle is retained to tackle the hysteresis phenomenon. The SOC-OCV function is highly nonlinear, which can be expressed in polynomial form as written below:
where
is the values of the polynomial coefficient, which are listed in
Table 2, and
Figure 5 shows the OCV test result.
The estimated SOC results of both models are summed up in
Table 3. The slight supremacy of the second order ARX model is found on the first order ARX model with a slightly high computational complexity. These are well in-line with the literature [
26,
29]. To determine the computational speed of both models, the algorithm was run repeatedly for 10 times. The desktop-PC has the following specifications: 3.4 GHz CPU and 8.0 GB RAM.
6. Discussion
Some evocative results can be drawn using the simulated results presented in
Section 5.
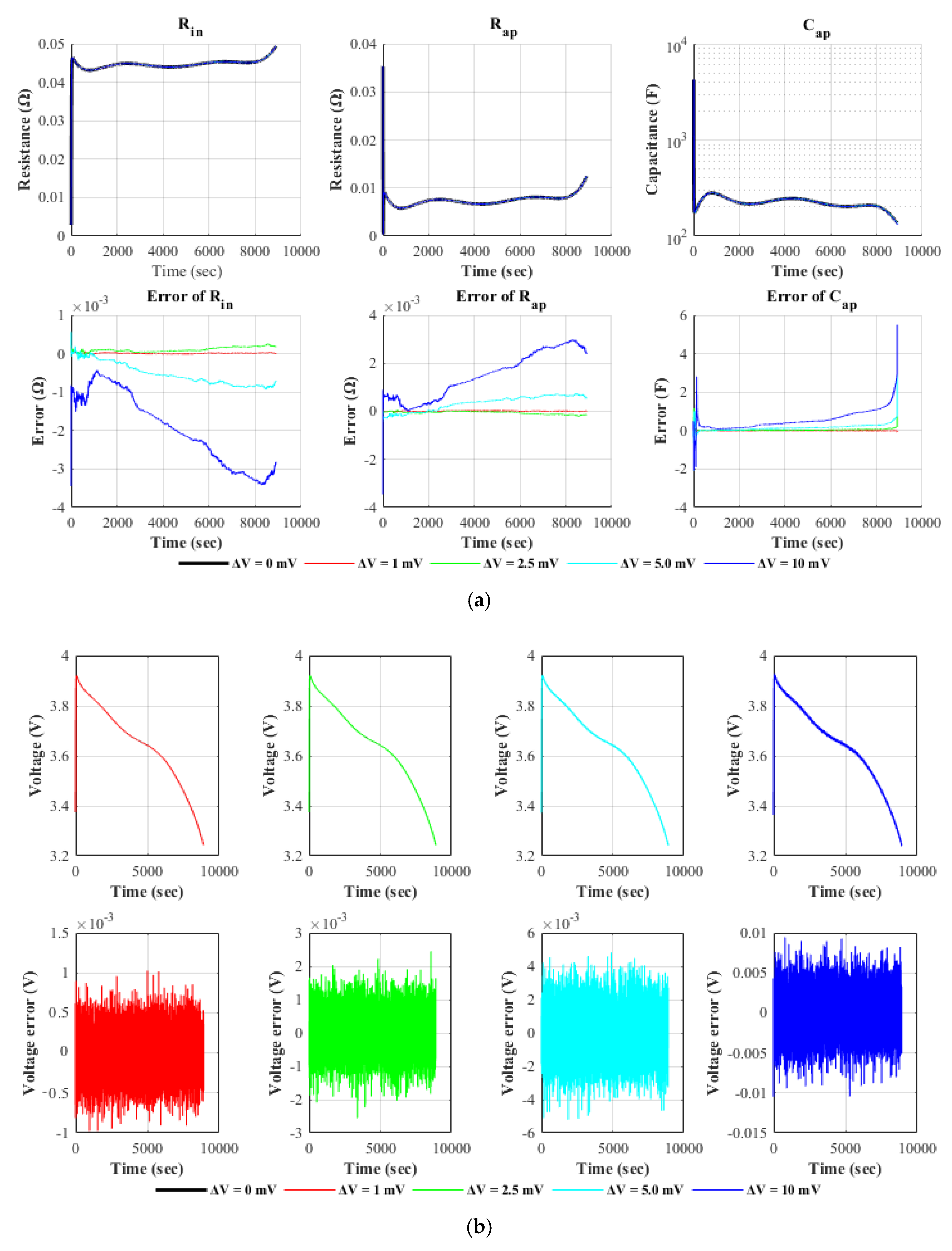
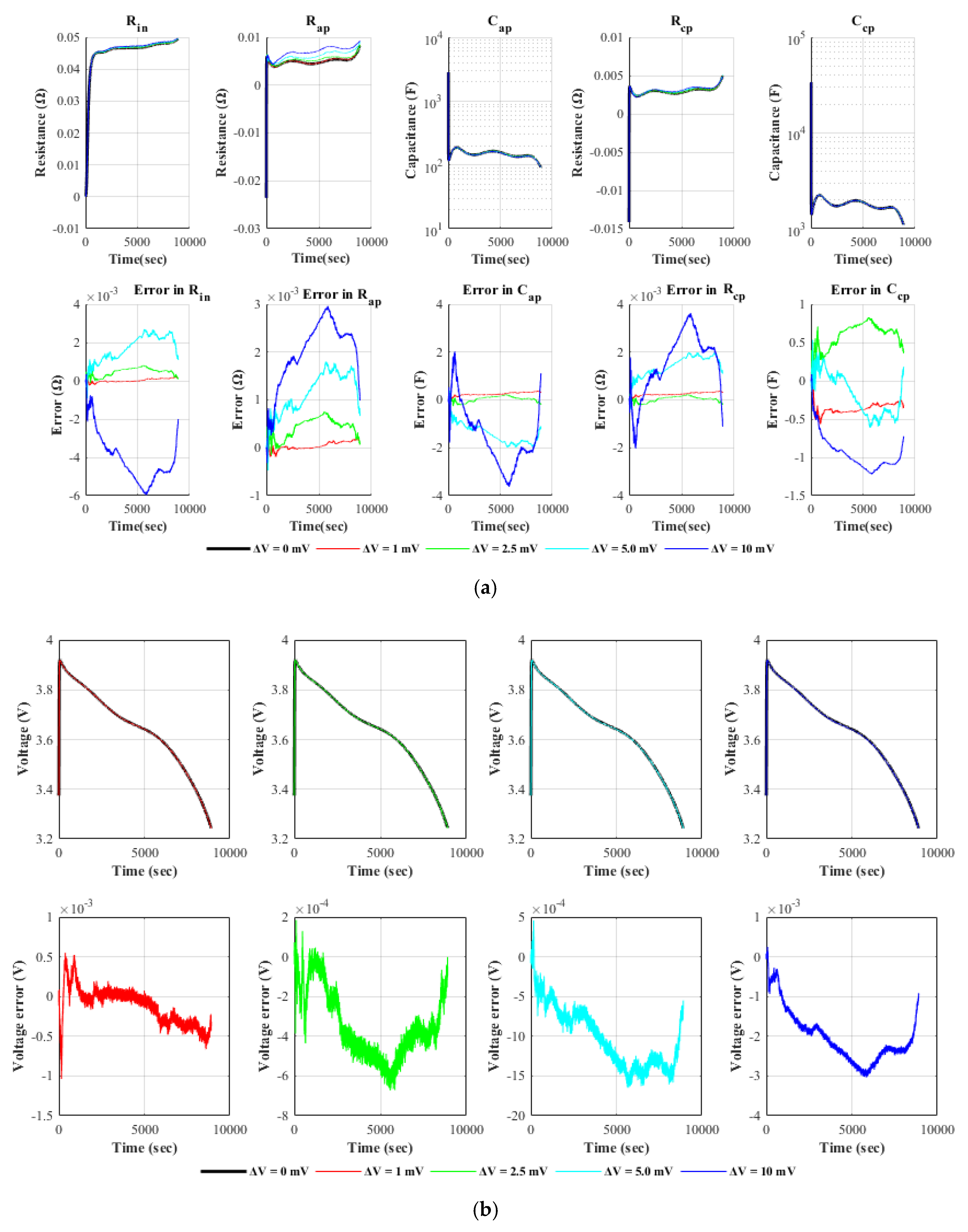
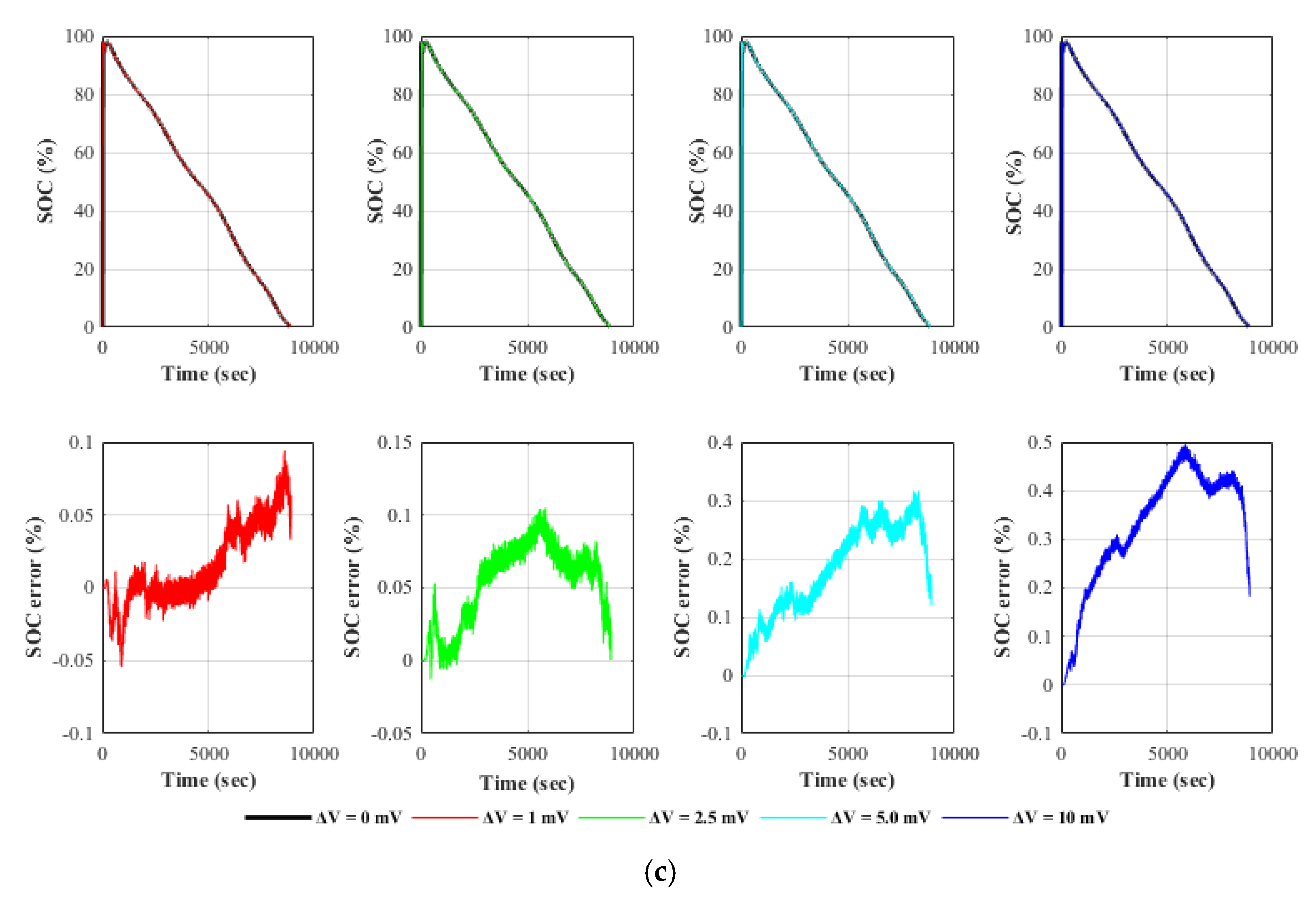
Different variations of voltage transducer precision (i.e., ±1 mV, ±2.5 mV, ±5 mV, and ±10 mV) were applied for parameter identification and SOC estimation of both (1RC and 2RC) ARX models. The results reveal that the small variation in voltage sensor accuracy has a significant impact on model accuracy and model accuracy has a direct effect on SOC estimation. When the uncertainty of ±1 mV was applied to the measured voltage values, an increase of 0.03% and 0.02% in the MAE was noted for first and second order ARX models, respectively. In case of ±10 mV uncertainty, the change in maximum noted the errors of SOC estimation are 3.30% and 2.72% for first and second order RC models respectively, which is not acceptable for SOC estimation of LIB. It is also important to note that the small change in
ΔV has a huge influence on model parameters and SOC estimation as shown in
Table 5 and
Table 7. Therefore, to ensure the accurate estimation of model parameters and SOC, it is recommended that the accuracy of the voltage sensor must be high, and it should be less than ±2.5 mV.
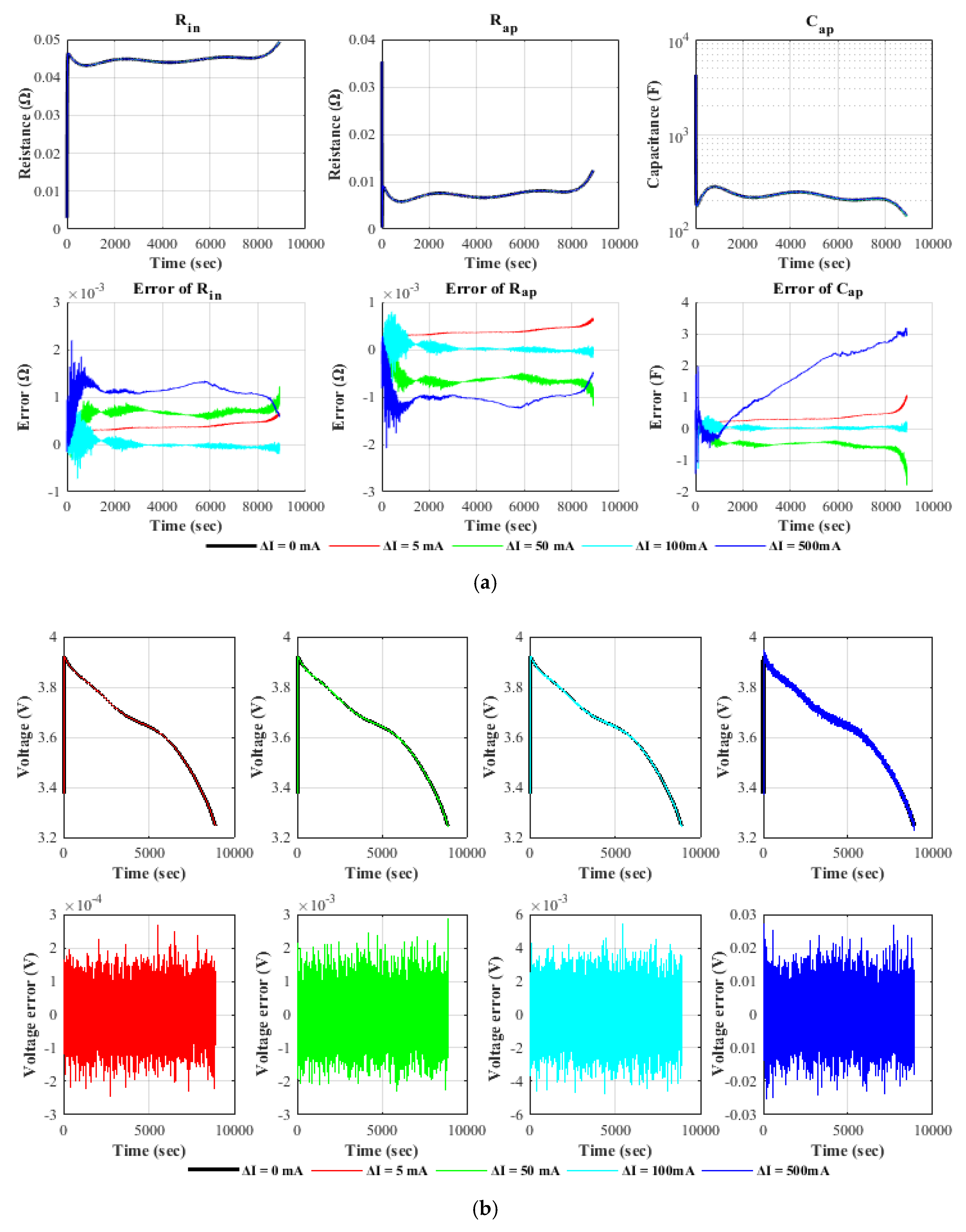
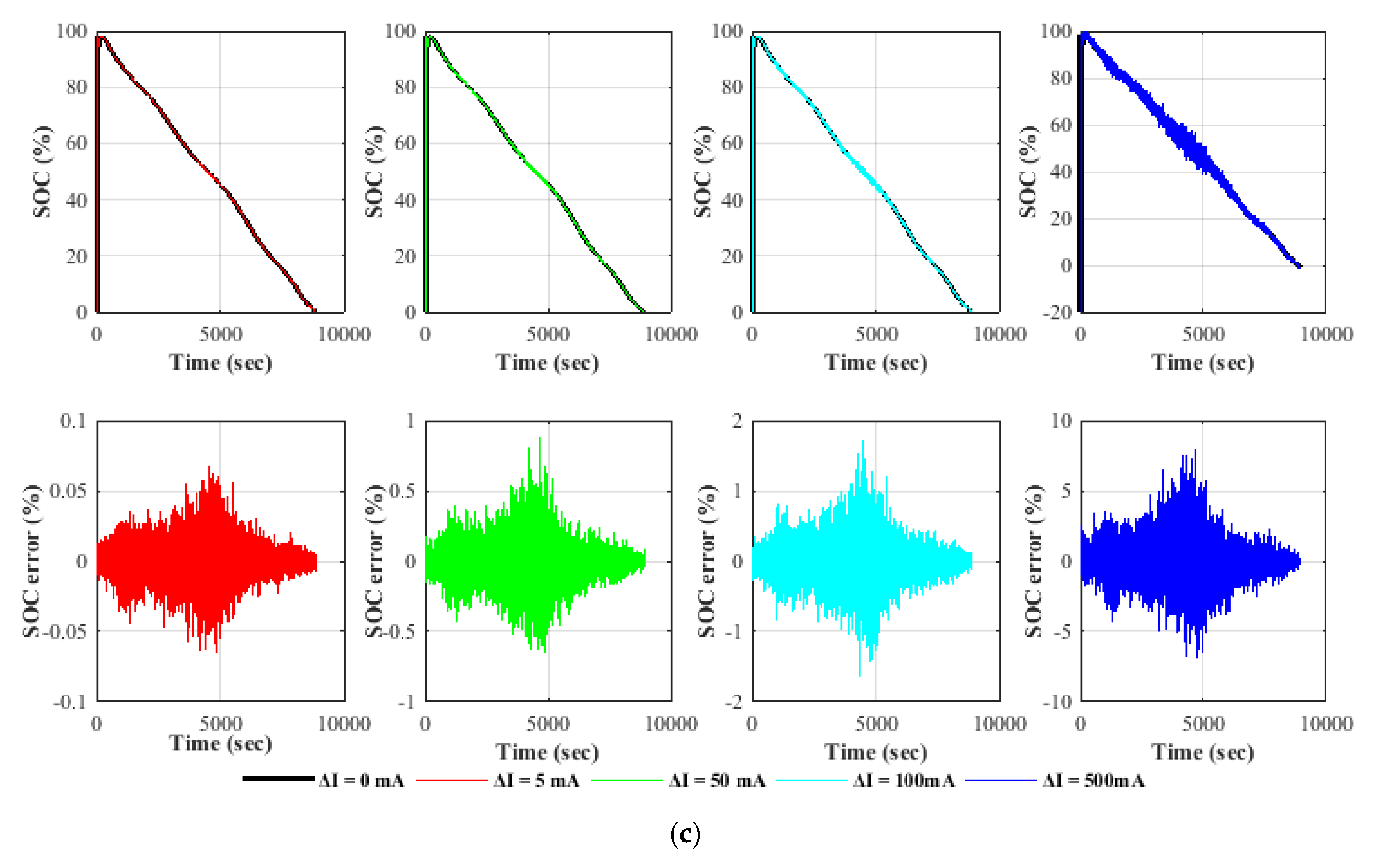
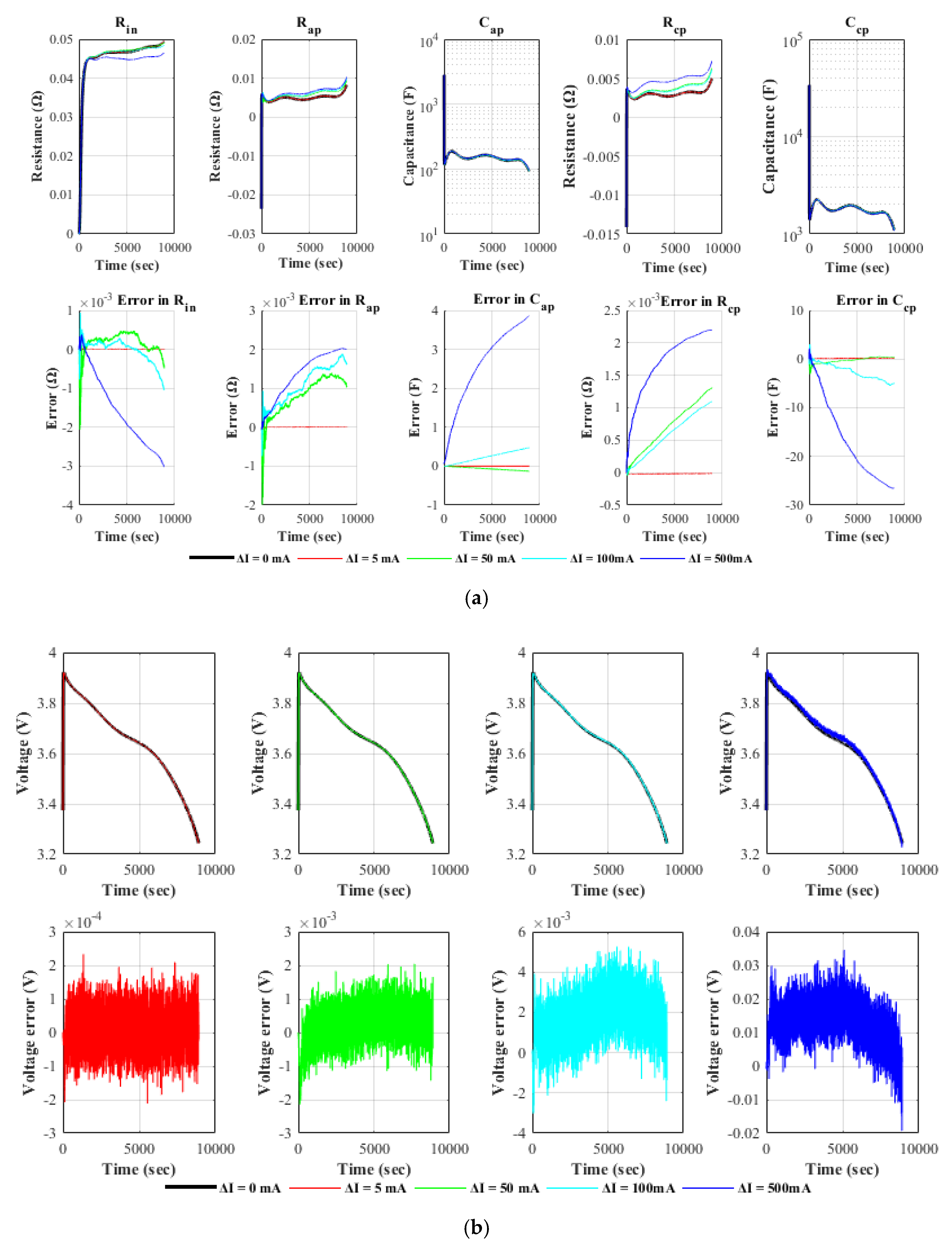
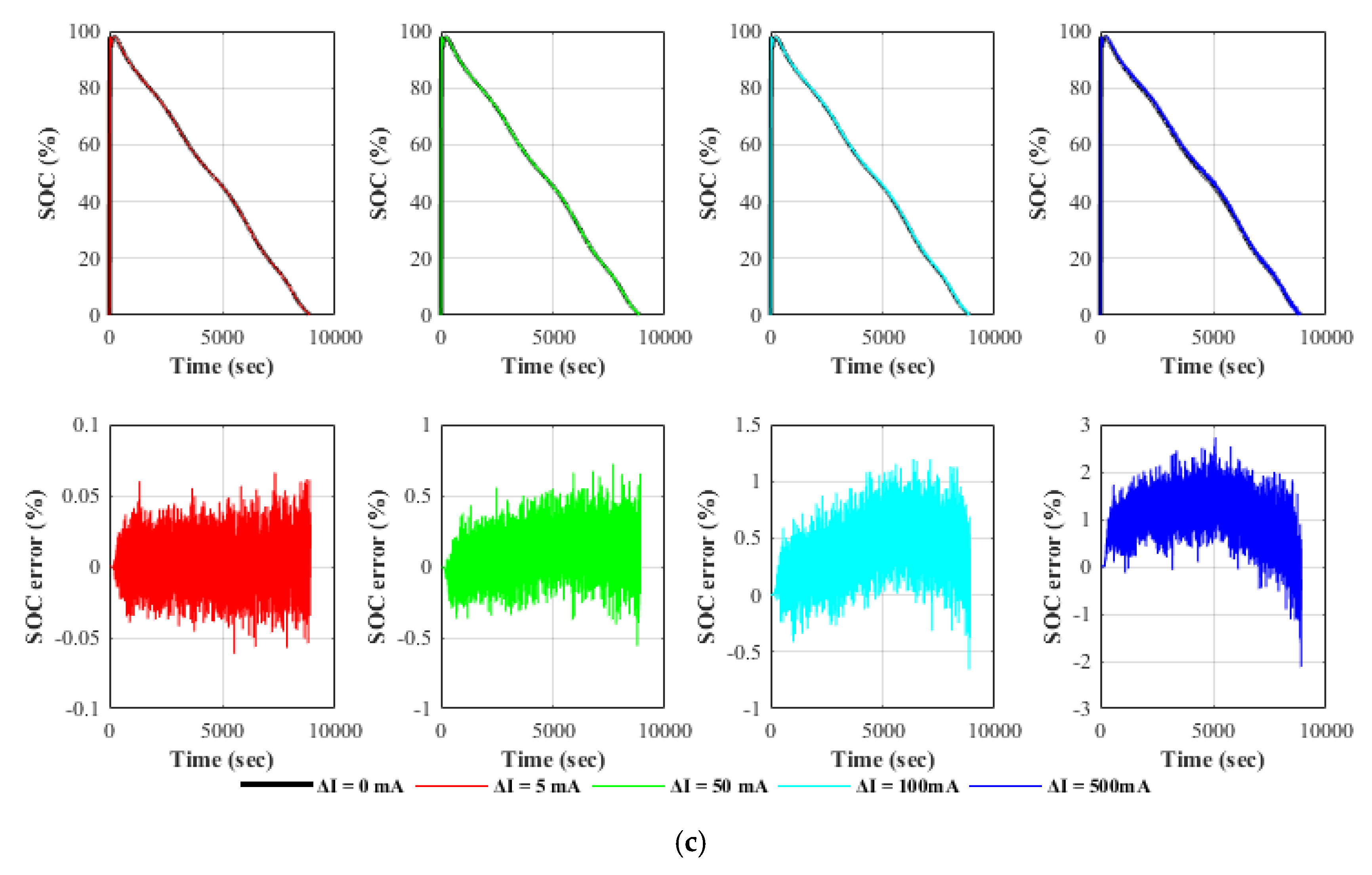
Similarly, different uncertainties (i.e., ±5 mA, ±50 mA, ±100 mA, and ±500 mA) in current sensor accuracy were also applied for model identification and SOC estimation of both (1RC and 2RC) ARX models. The current transducer sensitivity has an adverse influence on the model’s parameter and SOC estimation. The error of ±5 mA and ±50 mA in the measured battery’s current has a negligible influence on the accuracy of estimated SOC. As the value of error increased to ±0.1 A in 1RC battery model, the changes in the maximum SOC error and MAE are 1.69% and 0.19% respectively (
Table 4). The changes in MAE and maximum error for the 2RC model at ±0.5 A are 0.95% and 2.70% respectively (
Table 6). It is important to note that the small inaccuracy in the measured current did not have any drastic effect on the accuracy of estimated SOC as compared to voltage sensor inaccuracy. Therefore, to confine the SOC and parameters accuracy, the current accuracy should be less than ±0.05 A.
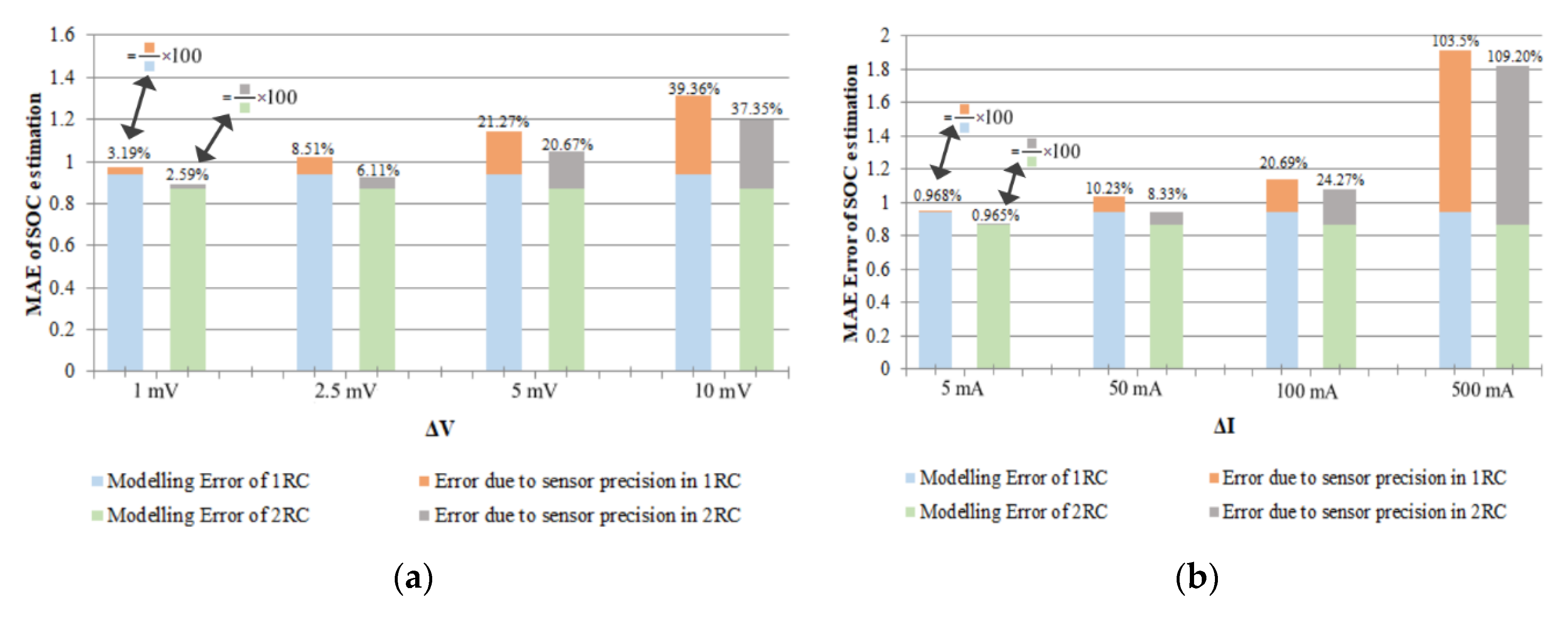
The second order RC battery model has better accuracy and high complexity compared to the 1RC battery model. The listed error values in
Table 4,
Table 5,
Table 6 and
Table 7 show only the error due to the sensor’s sensitivity. The MAE and relative MAE of both models are compared in
Figure 10. From the results presented in
Table 4,
Table 5,
Table 6 and
Table 7 and
Figure 10, the sensor errors have the same influence on the SOC estimation of both models. Therefore, it can be concluded that the error in sensor sensitivity has no direct association with the structure and complexity of the battery model.
7. Conclusions
In this work, the impact of sensor sensitivity was analyzed to observe their respective influences on parameter identification and SOC estimation. First and second order ARX battery models were adopted to evaluate the impact of sensor sensitivity. The battery was modeled using the Lagrange multiplier method. The voltage sensor error (i.e., ±1 mV, ±2.5 mV, ±5 mV, and ±10 mV) and current sensor error (i.e., ±5 mA, ±50 mA, ±100 mA, and ±500 mA) were simulated and inserted in the measured values. The results reveal that the voltage sensitivity has a very high impact on SOC estimation, and the accuracy of the voltage sensor should be ≥0.05% (with 5 V range) for first order MAE ≤1.02% and second order MAE ≤0.92%. The current sensory uncertainty has a lesser impact as compared to the voltage sensor. The accuracy of the current sensor ≥0.5% (with 10 A range) for first order MAE ≤1.03% and second order MAE ≤0.94%. The comparative analysis of both models revealed that the uncertainties in both sensors have the same influence on the SOC estimation despite the type of battery models.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}