Design and Development of a Reduced Form-Factor High Accuracy Three-Axis Teslameter

 , , , ,
, , , ,
Abstract
:1. Introduction
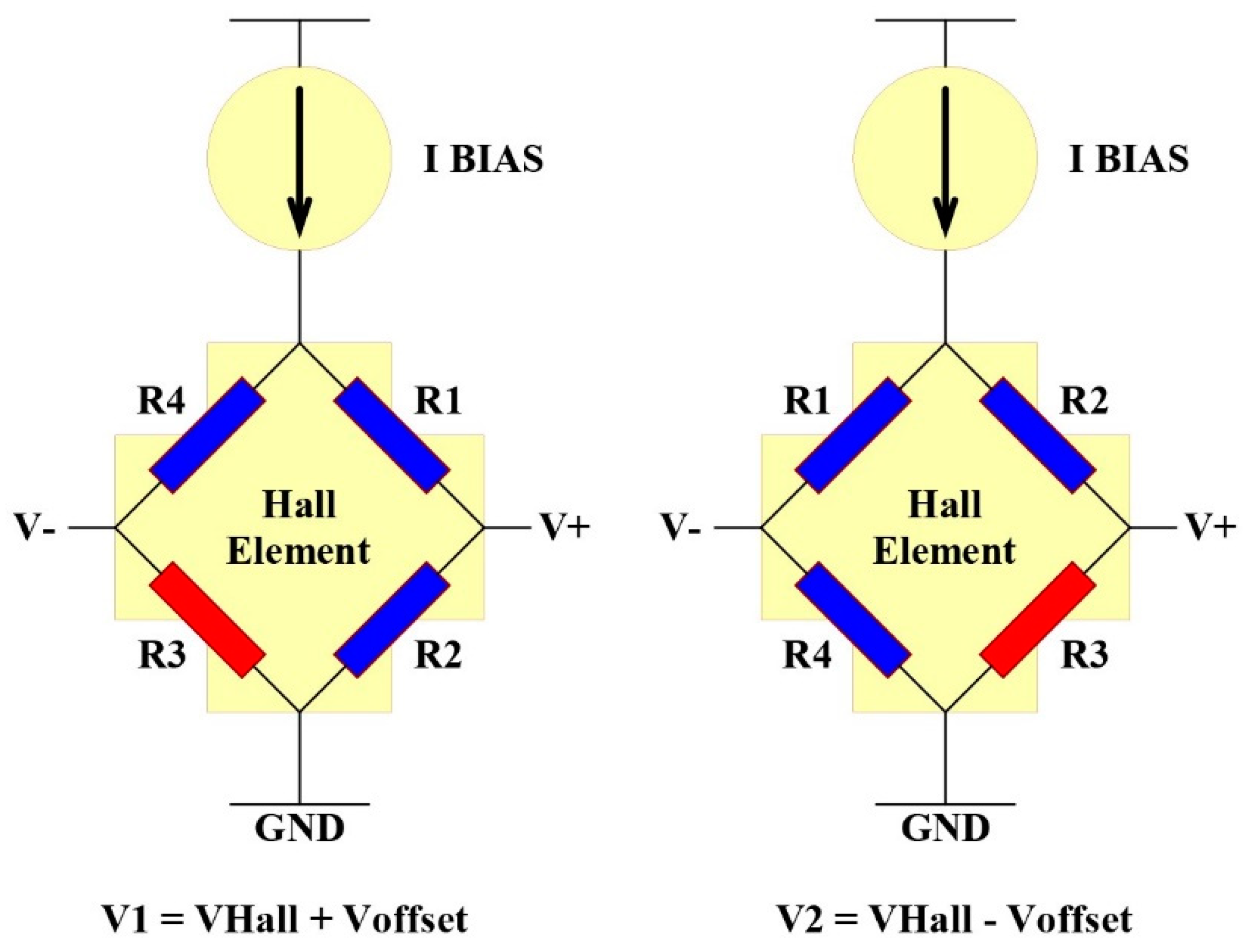
2. Hall Probe Theory
3. Architecture and Components of the Teslameter
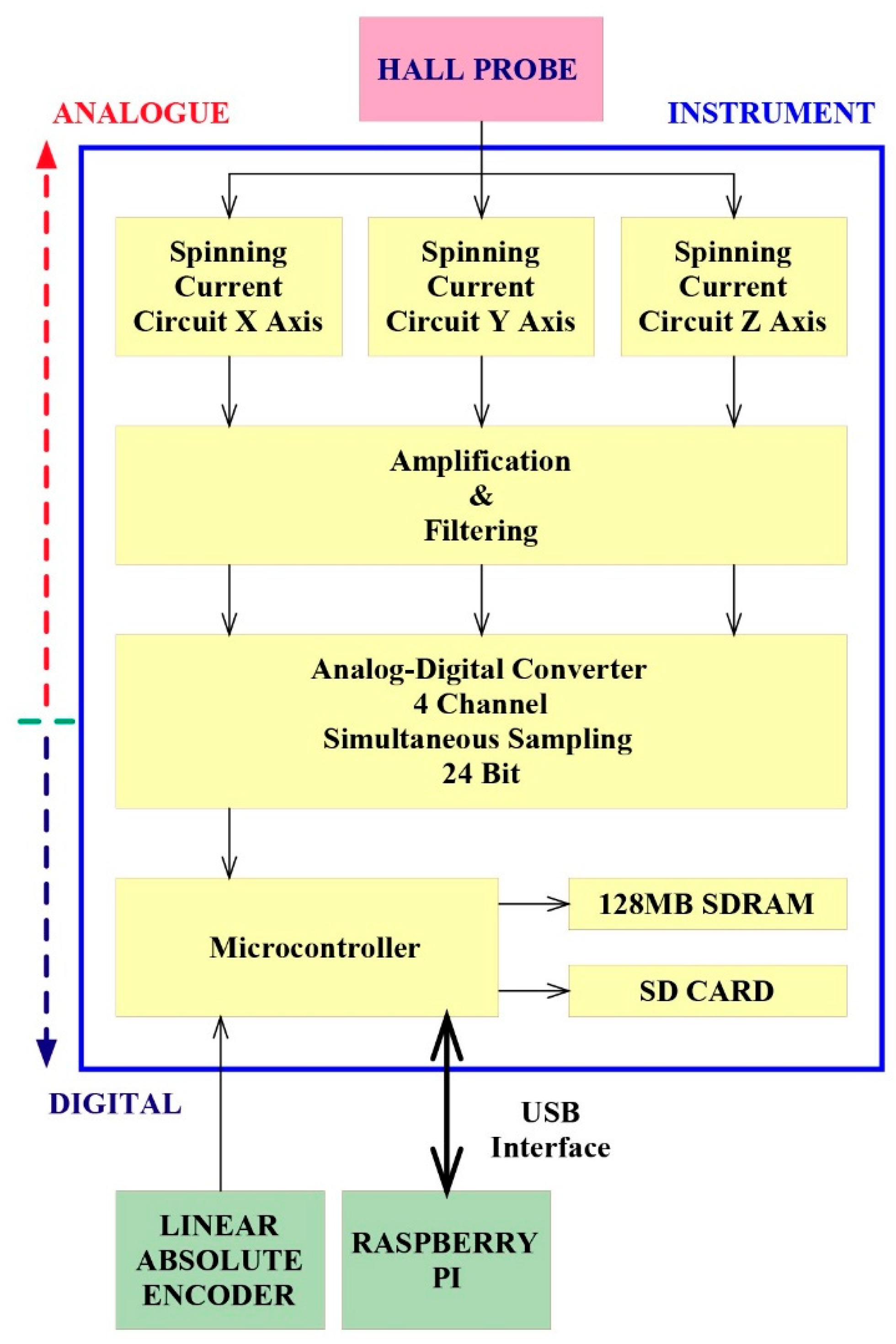
3.1. Architecture
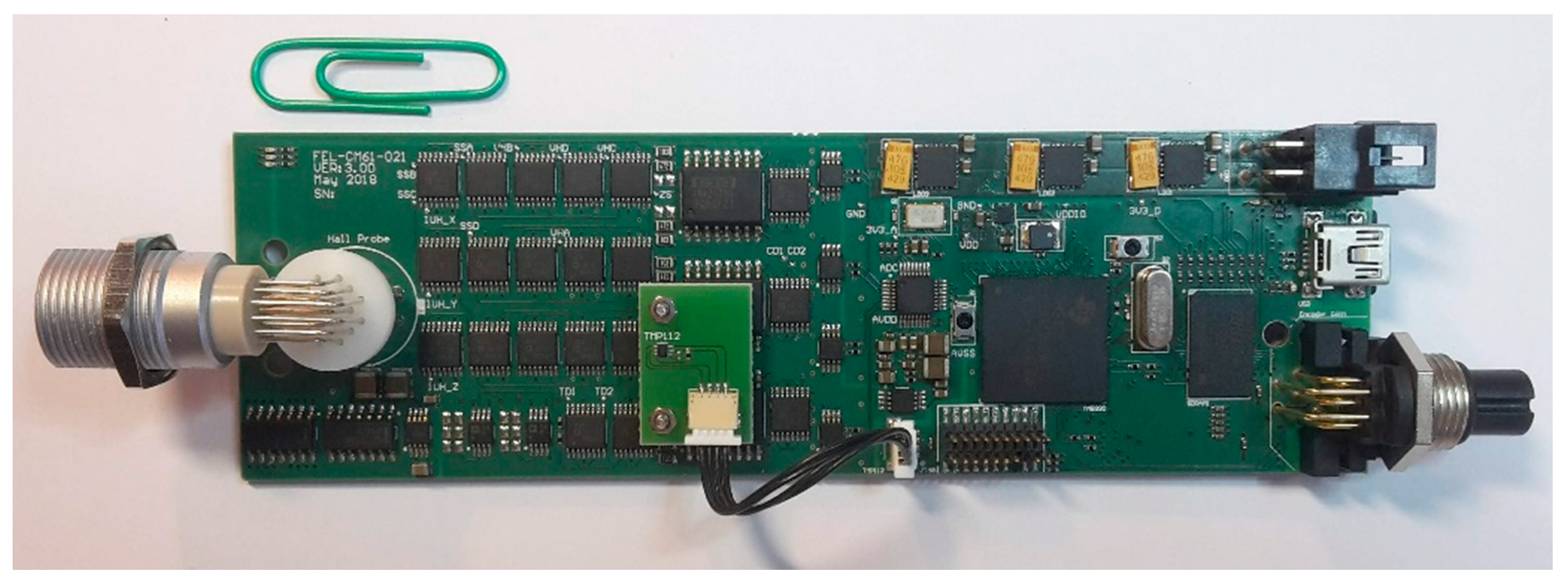
3.2. Instrument Components
3.2.1. Spinning Current Circuitry
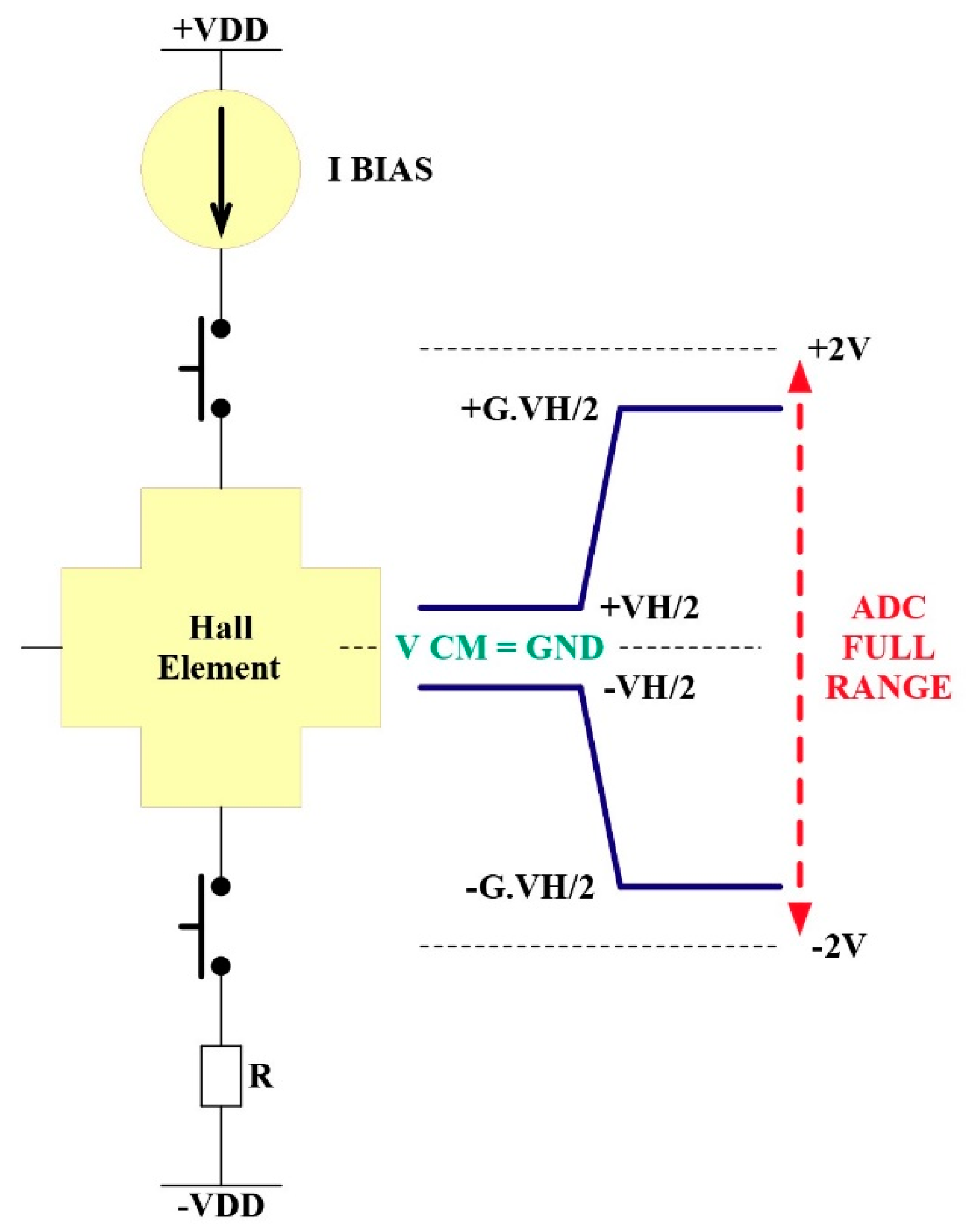
3.2.2. Spinning Output Amplification
3.2.3. Current Source Hall Probe Biasing
3.2.4. Interfacing of the Hall Probe PT100
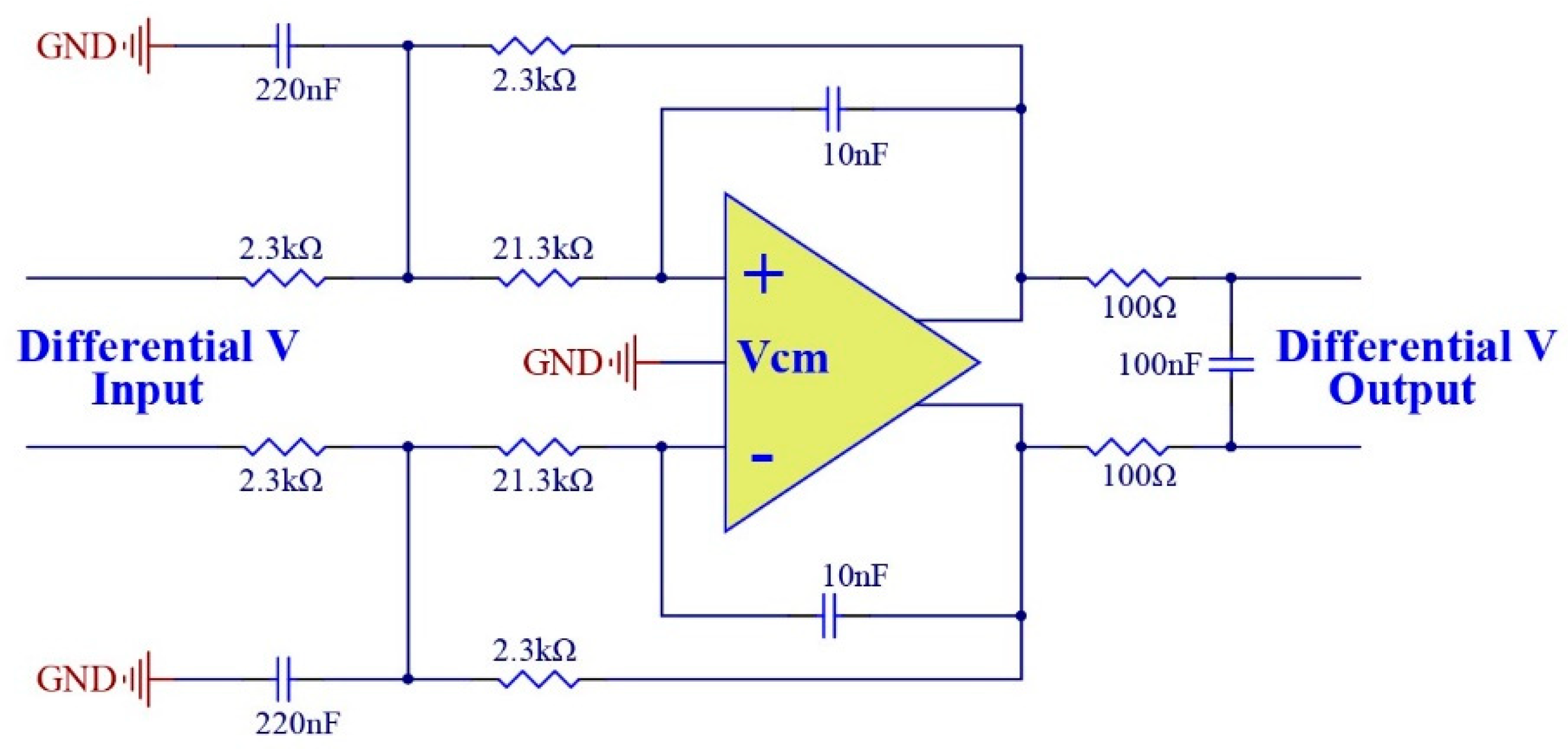
3.2.5. Antialiasing Filter and Analogue to Digital Converter
3.2.6. Microcontroller and SDRAMs
3.2.7. Heidenhain Encoder Interface
3.2.8. Voltage Regulation Circuitry
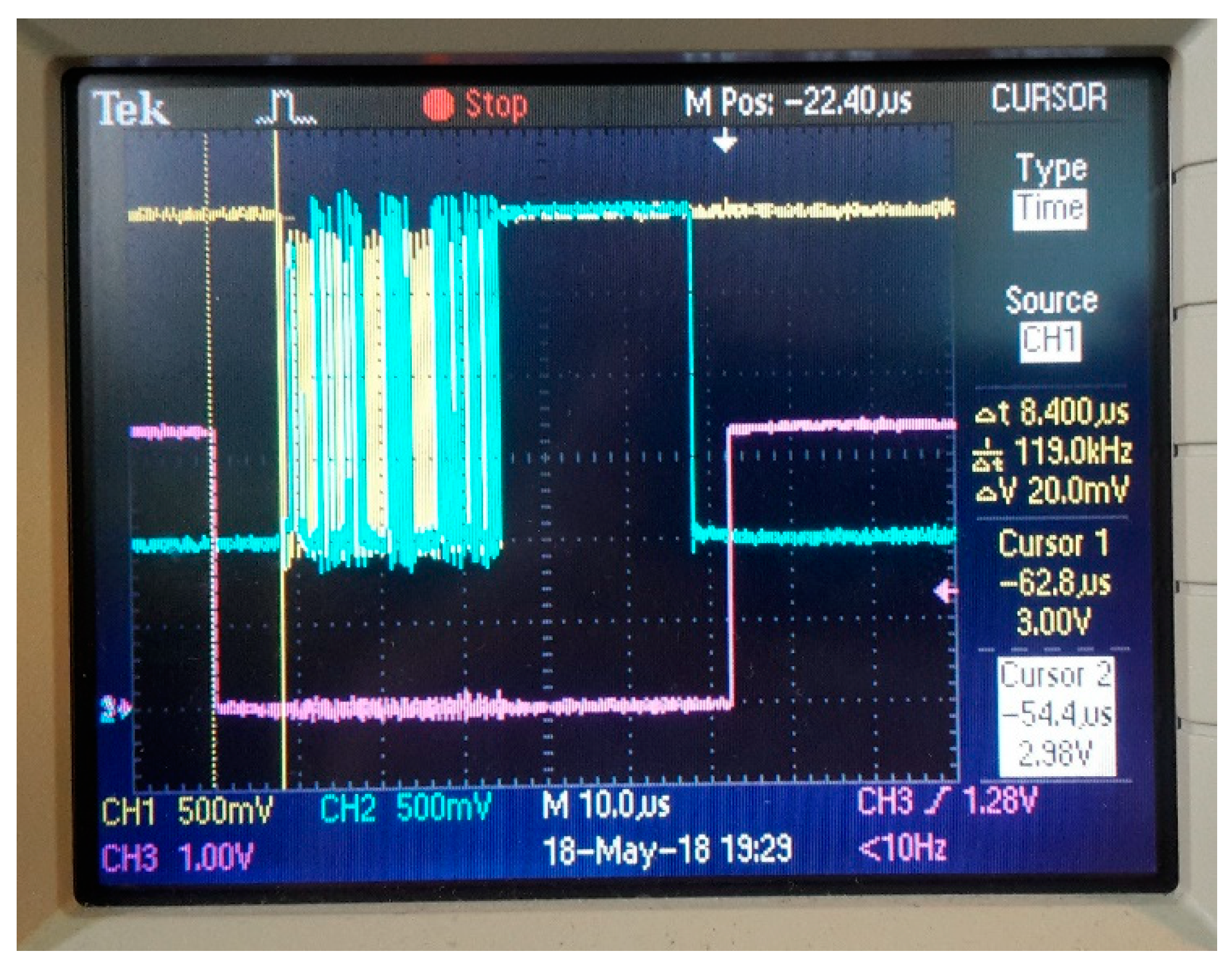
3.2.9. Communication Interfaces: USB 2.0 and TTL Signals
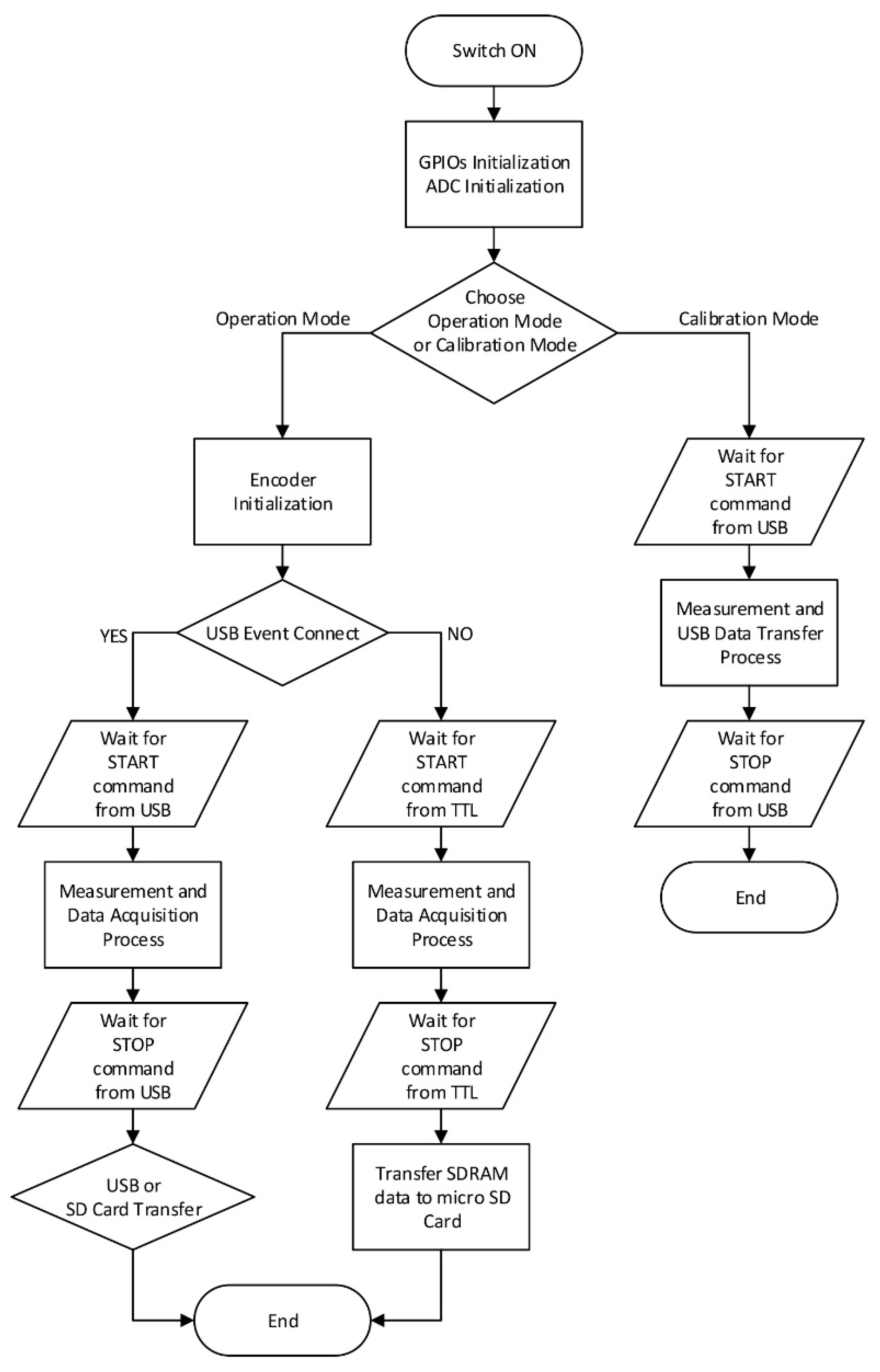
4. Embedded Microcontroller Software Program
5. Instrument Aluminum Enclosure
6. Experimental Measurements Results
6.1. Magnetic Field Range Testing
6.2. Noise Performance
6.3. Offset Fluctuation and Drift (0.1–10 Hz)
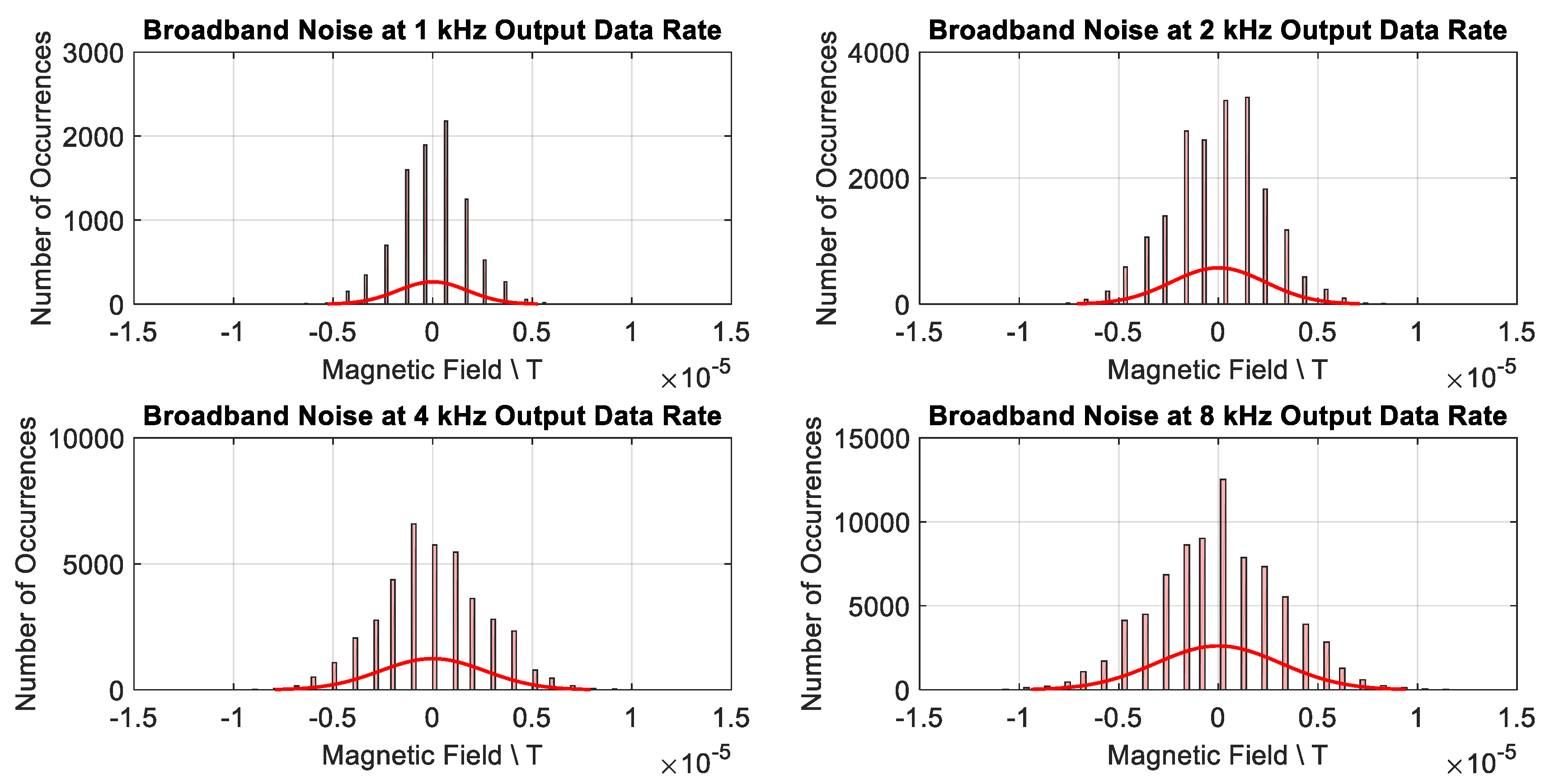
6.4. Broadband Noise (10 Hz–fT)
7. Discussion
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Satav, S.M.; Agarwal, V. Design and Development of a Low-Cost Digital Magnetic Field Meter with Wide Dynamic Range for EMC Precompliance Measurements and other Applications. IEEE Trans. Instrum. Meas. 2009, 58, 2837–2846. [Google Scholar] [CrossRef]
- Sanfilippo, S. Hall probes: Physics and application to magnetometry. In Proceedings of the Specialised Course on Magnets, Bruges, Belgium, 16–25 June 2009; pp. 423–462. [Google Scholar]
- Popovic, D.R.; Dimitrijevic, S.; Blagojevic, M.; Kejik, P.; Schurig, E.; Popovic, R.S. Three-Axis Teslameter With Integrated Hall Probe. IEEE Trans. Instrum. Meas. 2007, 56, 1396–1402. [Google Scholar] [CrossRef]
- Tosin, G.; Citadini, J.; Conforti, E. Hall-Probe Bench for Insertion-Device Characterization at LNLS. IEEE Trans. Instrum. Meas. 2007, 56, 2725–2730. [Google Scholar] [CrossRef]
- Gehlot, M.; Mishra, G. Development of Stretched wire measurement bench at IDDL, DAVV Indore. J. Phys. Conf. Ser. 2016, 755, 012054. [Google Scholar] [CrossRef]
- Calvi, M.; Brugger, M.; Danner, S.; Imhof, A.; Johri, H.; Schmidt, T.; Scoular, C. Swissfel U15 Magnet Assembly: First Experimental Results. In Proceedings of the FEL2012, Nara, Japan, 26–31 August 2012; pp. 662–665. [Google Scholar]
- Hall Probe S for H3A Magnetic Field Transducers. Available online: http://c1940652.r52.cf0.rackcdn.com/57971209b8d39a2071000bc2/hall-probe-s-for-h3a-mft-datasheet-r2[1].pdf (accessed on 26 March 2019).
- Paul Scherrer Institut. SwissFEL Concept Design Report. Available online: https://inis.iaea.org/collection/NCLCollectionStore/_Public/42/006/42006326.pdf?r=1&r=1 (accessed on 26 March 2019).
- H3A Magnetic Field Transducer. Available online: http://c1940652.r52.cf0.rackcdn.com/5791ded9b8d39a2071000a9c/h3a-magnetic-transducers-datasheet_rev02.pdf (accessed on 26 March 2019).
- Popovic, R.S. High Resolution Hall Magnetic Sensors. In Proceedings of the 29th International Conference on Microelectronics, Belgrade, Serbia, 12–14 May 2014; pp. 69–74. [Google Scholar]
- Mosser, V.; Matringe, N.; Haddab, Y. A Spinning Current Circuit for Hall Measurements down to the Nanotesla Range. IEEE Trans. Instrum. Meas. 2017, 66, 637–650. [Google Scholar] [CrossRef]
- Junfeng, J.; Wilko, K.; Kofi, M. A Continuous-Time Ripple Reduction Technique for Spinning-Current Hall Sensors. IEEE J. Solid-State Circuits 2014, 49, 1525–1534. [Google Scholar]
- Data Sheet for TMS320F2837xD Dual-Core Delfino™ Microcontrollers. Available online: http://www.ti.com/lit/ds/symlink/tms320f28379d.pdf (accessed on 26 March 2019).
- PCB Design Guidelines for reduced EMI. Available online: http://www.ti.com/lit/an/szza009/szza009.pdf (accessed on 26 March 2019).
- High-Speed Interface Layout Guidelines. Available online: http://www.ti.com/lit/an/spraar7h/spraar7h.pdf (accessed on 26 March 2019).
- Design Considerations for Mixed-Signal PCB Layout. Available online: https://www.teledyne-e2v.com/content/uploads/2014/09/Board-Layout.pdf (accessed on 26 March 2019).
- Data Sheet for ADG1611/ADG1612/ADG1613. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/adg1611_1612_1613.pdf (accessed on 26 March 2019).
- Data Sheet for INA2128 Dual, Low Power Instrumentation Amplifier. Available online: http://www.ti.com/lit/ds/symlink/ina2128.pdf (accessed on 26 March 2019).
- AN-1515 A Comprehensive Study of the Howland Current Pump. Available online: http://www.ti.com/lit/an/snoa474a/snoa474a.pdf (accessed on 26 March 2019).
- Data Sheet for REF50xx Low-Noise, Very Low Drift, Precision Voltage Reference. Available online: http://www.ti.com/lit/ds/symlink/ref5050.pdf (accessed on 26 March 2019).
- AN-1559 Practical RTD Interface Solutions. Available online: http://www.ti.com/lit/an/snoa481b/snoa481b.pdf (accessed on 26 March 2019).
- Appendix E: Temperature Measurement System. Available online: https://www.lakeshore.com/Documents/LSTC_appendixE_l.pdf (accessed on 26 March 2019).
- Fully-Differential Amplifiers. Available online: http://www.ti.com/lit/an/sloa054e/sloa054e.pdf (accessed on 26 March 2019).
- Data Sheet for THS413x High-Speed, Low-Noise, Fully-Differential I/O Amplifiers. Available online: http://www.ti.com/lit/ds/slos318i/slos318i.pdf (accessed on 26 March 2019).
- Data Sheet for ADS131A0x 2- or 4-Channel, 24-Bit, 128-kSPS, Simultaneous-Sampling, Delta-Sigma ADC. Available online: http://www.ti.com/lit/ds/symlink/ads131a04.pdf (accessed on 26 March 2019).
- Accounting for delay from multiple sources in delta-sigma ADCs. Available online: http://www.ti.com/lit/wp/slyy095a/slyy095a.pdf (accessed on 26 March 2019).
- Data Sheet for IS42/45R86400D/16320D/32160D IS42/45S86400D/16320D/32160D. Available online: http://www.issi.com/WW/pdf/42-45R-S_86400D-16320D-32160D.pdf (accessed on 26 March 2019).
- DDR2 (Point-to-Point) Package Sizes and Layout Basics. Available online: https://www.micron.com/support/~/media/c40b5a5e4afd4bdfa285edf8e5ca1017.ashx (accessed on 26 March 2019).
- DDR SDRAM Point-to-Point Simulation Process. Available online: https://www.micron.com/~/media/documents/products/technical-note/.../tn4611.pdf (accessed on 26 March 2019).
- Microstrip and Stripline Design. Available online: https://www.analog.com/media/en/training-seminars/tutorials/MT-094.pdf (accessed on 26 March 2019).
- The IBIS model, Part 3: Using IBIS models to investigate signal-integrity issues. Available online: http://www.ti.com/lit/an/slyt413/slyt413.pdf (accessed on 26 March 2019).
- Termination for Point-to-Point Systems Introduction. Available online: https://www.micron.com/-/media/client/.../tn4606_point_to_point-termination.pdf (accessed on 26 March 2019).
- EnDat 2.2 – Bidirectional Interface for Position Encoders. Available online: http://www2.asiaa.sinica.edu.tw/~homin/wiki/pmwiki-2.1.27/uploads/ALMA/Endat2_1and2_2.pdf (accessed on 26 March 2019).
- C2000 Position Manager EnDat22 Library Module User Guide. Available online: http://www.ti.com/lit/ug/sprui35/sprui35.pdf (accessed on 26 March 2019).
- Data Sheet for SN65HVD7x 3.3-V Supply RS-485 With IEC ESD Protection. Available online: http://www.ti.com/lit/ds/sllse11h/sllse11h.pdf (accessed on 26 March 2019).
- Data Sheet for TPS7A470x 36-V, 1-A, 4-µVRMS, RF LDO Voltage Regulator. Available online: http://www.ti.com/lit/ds/symlink/tps7a47.pdf (accessed on 26 March 2019).
- Data Sheet for ISO773x High-Speed, Robust-EMC Reinforced Triple-Channel Digital Isolators. Available online: http://www.ti.com/lit/ds/symlink/iso7731.pdf (accessed on 26 March 2019).
- Popovic, D.R.; Dimitrijevic, S.; Spasic, S.; Popovic, R.S. High-accuracy teslameter with thin high-resolution three-axis Hall probe. Measurement (Lond.) 2015, 98, 407–413. [Google Scholar] [CrossRef]
- Renella, D.P.; Spasic, S.; Dimitrijevic, S.; Blagojevic, M.; Popovic, R.S. An overview of commercially available teslameters for applications in modern science and industry. Acta IMEKO 2017, 6, 43–49. [Google Scholar] [CrossRef]
- Jovanovic, U.; Jovanovic, I.; Blagojevic, M.; Krstic, D.; Mancic, D. Low-cost Teslameter based on Hall Effect Sensor MLX90242. Serb. J. Electr. Eng. 2018, 15, 225–232. [Google Scholar] [CrossRef]
- Jovanovic, U.; Jovanovic, I.; Blagojevic, M.; Mancic, D. One Solution of a Low-Cost Teslameter. In Proceedings of the 13th International Conference on Applied Electromagnetics, Nis, Serbia, 30 August–1 September 2017. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Output Data Rate/kHz | Sinc3 Filter Bandwidth/Hz |
|---|---|
| 1 | 262 |
| 2 | 524 |
| 4 | 1048 |
| 8 | 2096 |
| Output Data Rate | 1 kHz | 2 kHz | 4 kHz | 8 kHz |
|---|---|---|---|---|
| OSR | 4096 | 2048 | 1024 | 512 |
| Number of Samples Delay from Sinc3 filter/samples | 1.4996 | 1.4993 | 1.4985 | 1.4971 |
| Number of Samples Delay from Digital Logic/samples | 1 | 1 | 1 | 1 |
| Total Number of Samples Delay/samples | 2.4996 | 2.4993 | 2.4985 | 2.4971 |
| Total Group Delay/ms | 2.4996 | 1.2496 | 0.6246 | 0.3121 |
| Before 10 Hz External LPF | After 10 Hz External LPF | ||||
|---|---|---|---|---|---|
| Output Data Rate/kHz | 1σ Error/µT | Pk-Pk error/µT | 1σ Error/µT | Pk-Pk error/µT | |
| 1 | 1.770117 | 10.620700 | 0.782971 | 4.697829 | 0.364864 |
| 2 | 2.356910 | 14.141465 | 1.094589 | 6.567535 | 0.510077 |
| 4 | 2.635093 | 15.810560 | 1.160819 | 6.964918 | 0.540940 |
| 8 | 3.133331 | 18.799990 | 1.266418 | 7.598508 | 0.590149 |
| Output Data Rate/kHz | Bandwidth/Hz | 1σ Error/µT | |
|---|---|---|---|
| 1 | 262 | 1.567720 | 0.0634 |
| 2 | 500 | 2.056552 | 0.0832 |
| 4 | 500 | 2.395707 | 0.0969 |
| 8 | 500 | 2.864964 | 0.1159 |
| Parameter | SENIS | Projekt Elektronik | Group3 | Developed Teslameter |
|---|---|---|---|---|
| DC Field Accuracy/% | 0.002% | 0.005% | 0.01% | 0.01% |
| Magnetic Resolution/µT | 0.1 µT | 0.1 µT | 0.1 µT | 0.8 µT |
| Measurement Range/T | 1 µT–30 T | 20 mT–2T | 0.3–3T | ± 2 T |
| Bandwidth/kHz | DC–75 kHz | DC–1 kHz | DC–3 kHz | DC–0.5 kHz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cassar, J.; Sammut, A.; Sammut, N.; Calvi, M.; Dimitrijevic, S.; Popovic, R.S. Design and Development of a Reduced Form-Factor High Accuracy Three-Axis Teslameter. Electronics 2019, 8, 368. https://doi.org/10.3390/electronics8030368
Cassar J, Sammut A, Sammut N, Calvi M, Dimitrijevic S, Popovic RS. Design and Development of a Reduced Form-Factor High Accuracy Three-Axis Teslameter. Electronics. 2019; 8(3):368. https://doi.org/10.3390/electronics8030368
Chicago/Turabian StyleCassar, Johann, Andrew Sammut, Nicholas Sammut, Marco Calvi, Sasa Dimitrijevic, and Radivoje S. Popovic. 2019. "Design and Development of a Reduced Form-Factor High Accuracy Three-Axis Teslameter" Electronics 8, no. 3: 368. https://doi.org/10.3390/electronics8030368