Exponential Synchronization in Inertial Neural Networks with Time Delays

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
3. Main Results
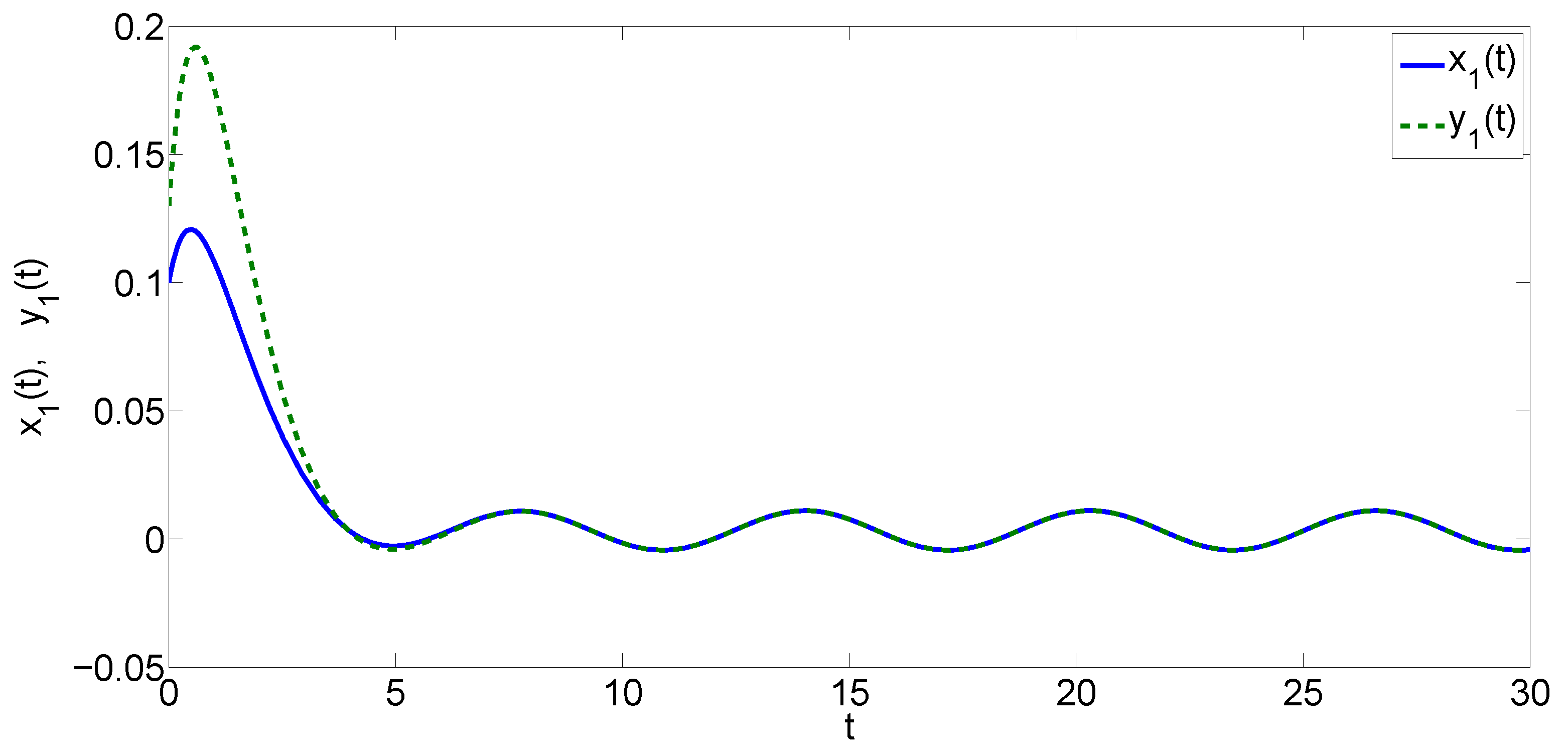
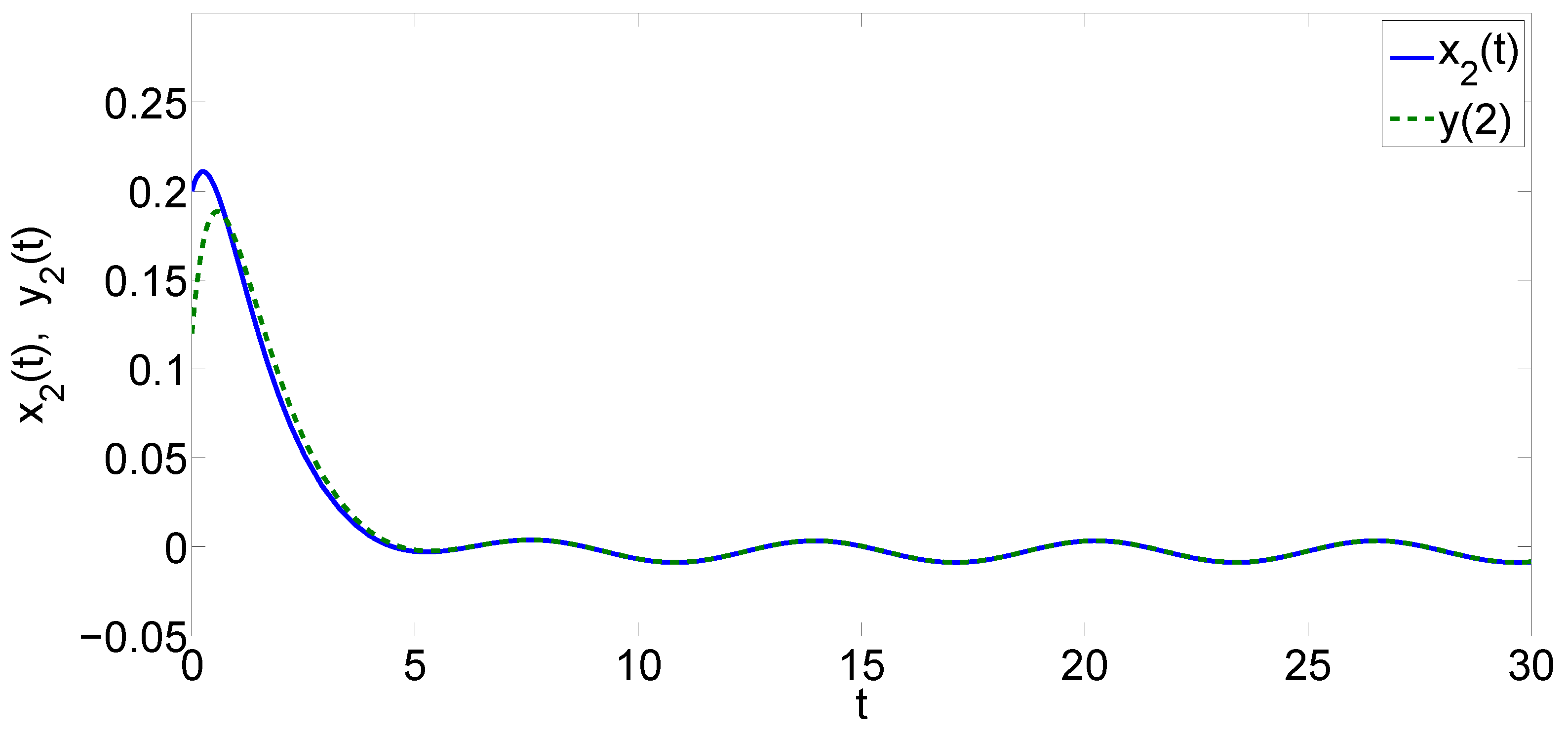
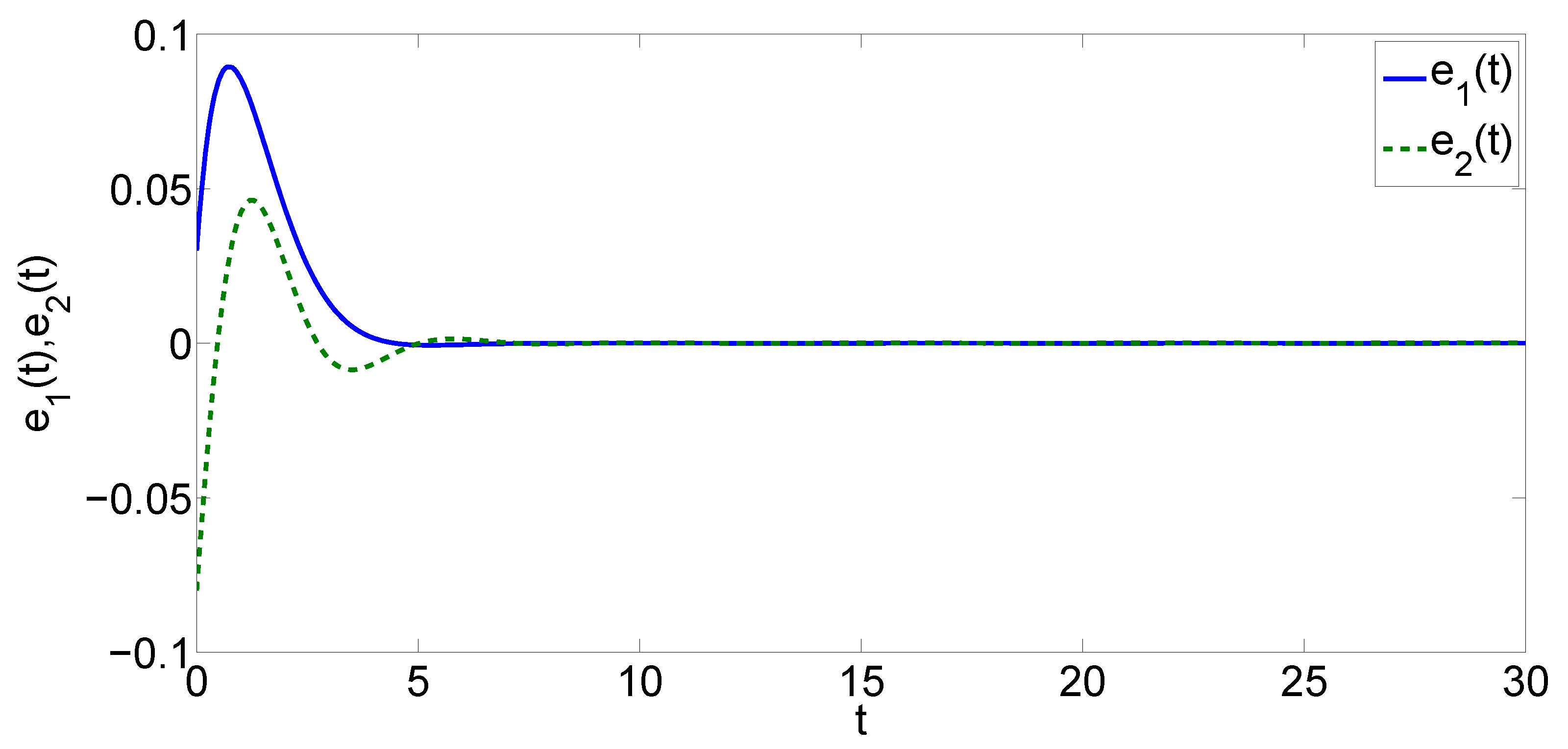
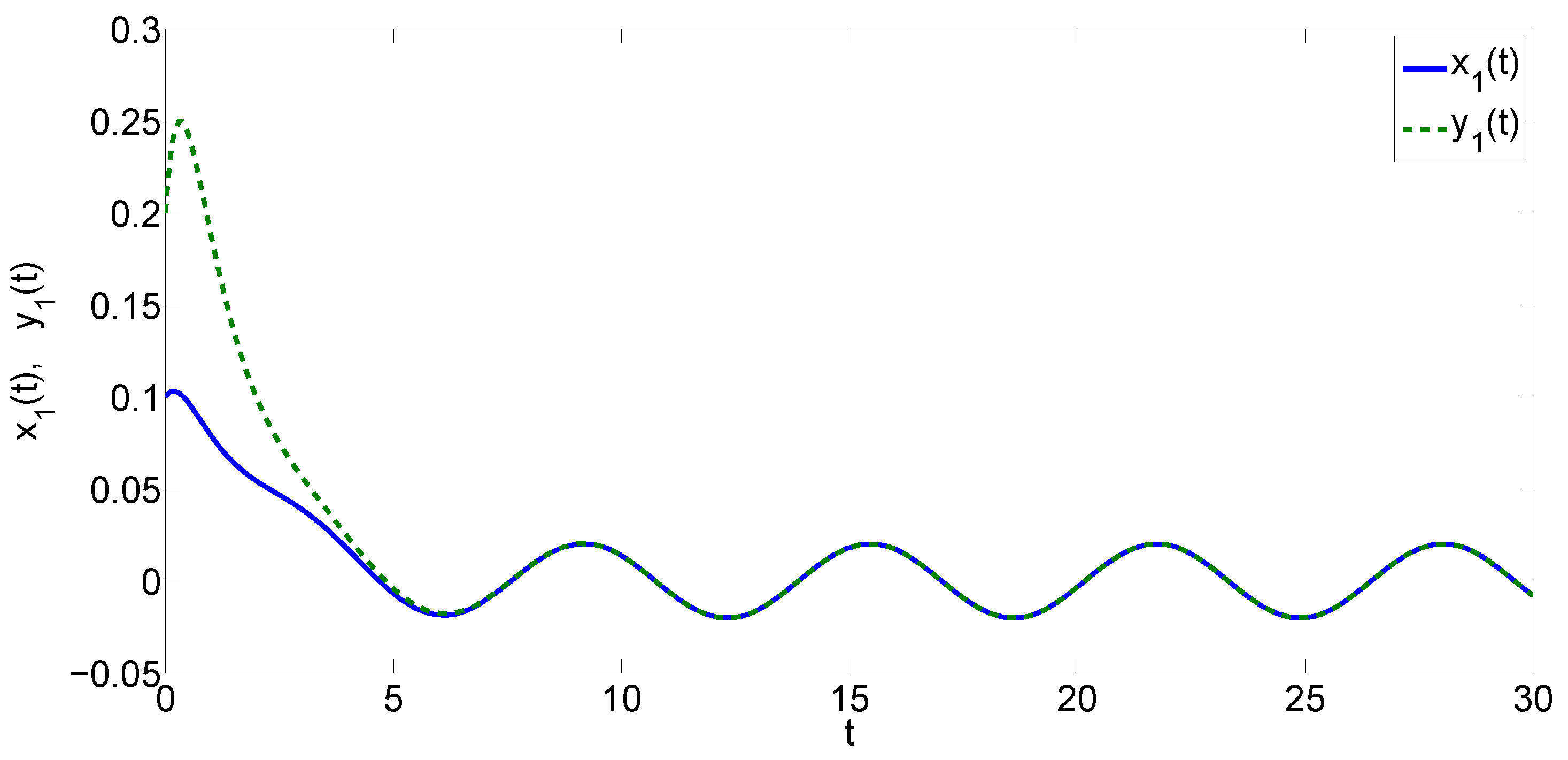
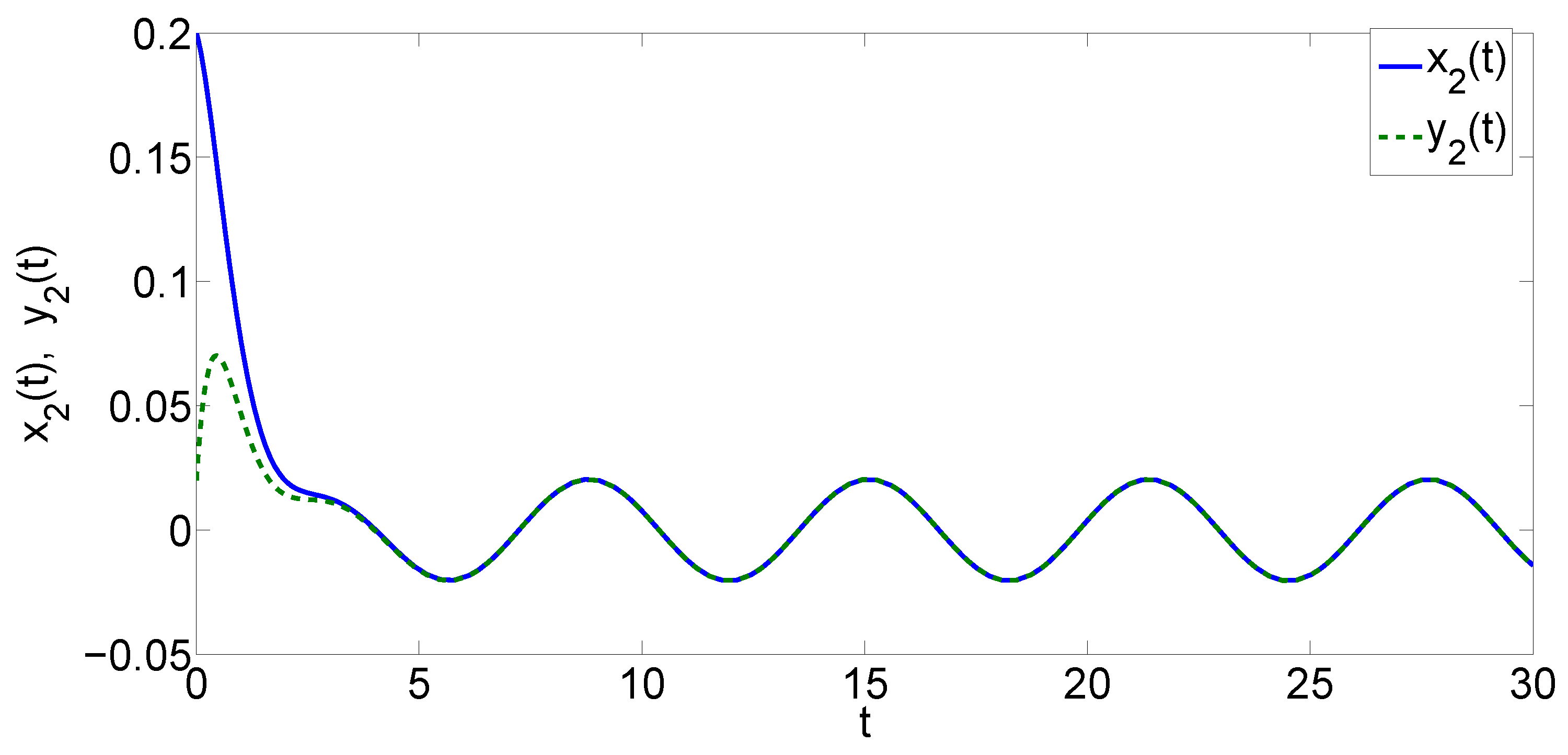
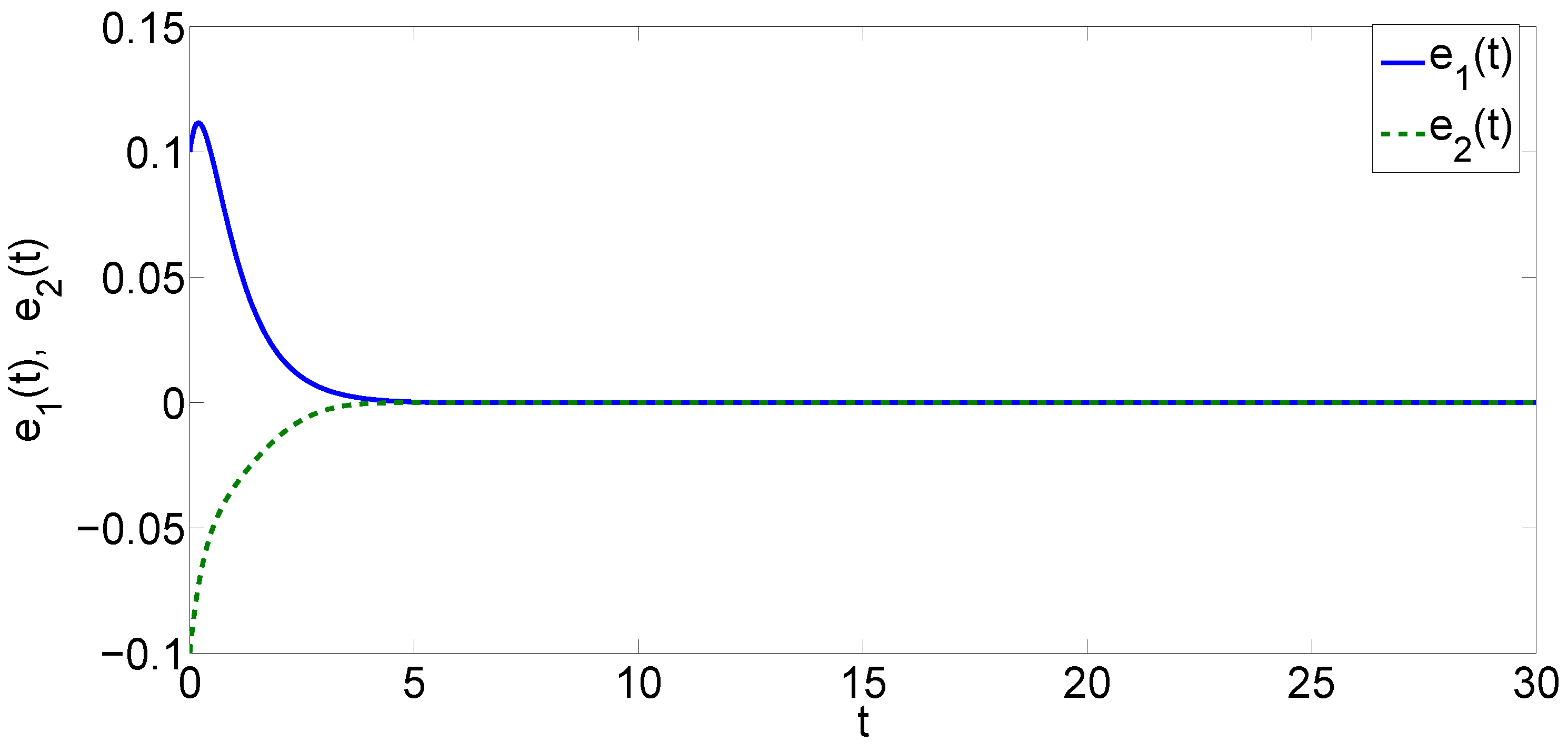
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, X.; Wen, B.; Zhao, C. Theoretical, numerical and experimental study on synchronization of three identical exciters in a vibrating system. Chin. J. Mech. Eng. 2013, 26, 746–757. [Google Scholar] [CrossRef]
- Lian, H.; Xiao, S.; Wang, Z.; Zhang, X.; Xiao, H. Further results on sampled-data synchronization control for chaotic neural networks with actuator saturation. Neurocomputing 2019, in press. [Google Scholar] [CrossRef]
- Xiao, S.; Lian, H.; Teo, K.; Zeng, H.; Zhang, X. A new Lyapunov functional approach to sampled-data synchronization control for delayed neural networks. J. Frankl. Inst. 2018, 355, 8857–8873. [Google Scholar] [CrossRef]
- Chung, S.J.; Slotine, J.J.E. Cooperative robot control and synchronization of Lagrangian systems. In Proceedings of the IEEE Conference on Decision & Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Weifa, P.; Dezong, Z. Speed Synchronization of Multi Induction Motors with Total Sliding Mode Control. In Proceedings of the 2010 Asia-Pacific Power & Energy Engineering Conference, Chengdu, China, 28–31 March 2010. [Google Scholar]
- Rooks, B.W. Software synchronization for radial forging machine manipulators. Ind. Robot Int. J. 1996, 23, 19–23. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, S.; Huang, M. Influence Factors Research on Control Performance of Synchronous Control System for Giant Forging Hydraulic. Press Forg. Stamp. Technol. 2010, 35, 68–72. [Google Scholar]
- Sun, H.; Chiu, T.C. Motion synchronization for dual-cylinder electrohydraulic lift systems. IEEE/ASME Trans. Mechatron. 2002, 7, 171–181. [Google Scholar]
- Al-Mahbashi, G.; Noorani, M.S.M.; Bakar, S.A. Projective lag synchronization in drive-response dynamical networks with delay coupling via hybrid feedback control. Nonlinear Dyn. 2015, 82, 1569–1579. [Google Scholar] [CrossRef]
- Zhou, L.; She, J.; Zhou, S.; Li, C. Compensation for state-dependent nonlinearity in a modified repetitive-control system. Int. J. Robust Nonlin. Control 2018, 28, 213–226. [Google Scholar] [CrossRef]
- Zhou, L.; She, J.; Zhou, S. Robust H∞ control of an observer-based repetitive-control system. J. Frankl. Inst. 2018, 355, 4952–4969. [Google Scholar] [CrossRef]
- Zhou, W.; Zhu, Q.; Shi, P. Adaptive Synchronization for Neutral-Type Neural Networks with Stochastic Perturbation and Markovian Switching Parameters. IEEE Trans. Cybern. 2014, 44, 2848–2860. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Zhou, W.; Shi, P.; Yang, X.; Zhou, X.; Su, H. Adaptive synchronization of delayed Markovian switching neural networks with Lvy noise. Neurocomputing 2015, 156, 231–238. [Google Scholar] [CrossRef]
- Li, X.; Song, S. Research on synchronization of chaotic delayed neural networks with stochastic perturbation using impulsive control method. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3892–3900. [Google Scholar] [CrossRef]
- Sun, W.; Wang, S.; Wang, G. Lag synchronization via pinning control between two coupled networks. Nonlinear Dyn. 2015, 79, 2659–2666. [Google Scholar] [CrossRef]
- Wai, R.J.; Muthusamy, R. Fuzzy-neural-network inherited sliding-mode control for robot manipulator including actuator dynamics. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 274–287. [Google Scholar]
- Zhang, B.; Han, Q.; Zhang, X.; Yu, X. Sliding mode control with mixed current and delayed states for offshore steel jacket platform. IEEE Trans. Control Syst. Technol. 2014, 22, 1769–1783. [Google Scholar] [CrossRef]
- Zhang, B.; Han, Q.; Zhang, X. Recent advances in vibration control of offshore platforms. Nonlinear Dyn. 2017, 89, 755–771. [Google Scholar] [CrossRef]
- Andrievsky, B.; Fradkov, A.L.; Liberzon, D. Robustness of Pecora-Carroll synchronization under communication constraints. Syst. Control Lett. 2018, 111, 27–33. [Google Scholar] [CrossRef]
- Badcock, K.L.; Westervelt, R.M. Dynamics of simple electronic neural networks. Phys. D 1987, 28, 305–316. [Google Scholar] [CrossRef]
- Horikawa, Y.O. Bifurcation and stabilization of oscillations in ring neural networks with inertia. Phys. D 2009, 238, 2409–2418. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Han, Q.-L.; Wang, Z.; Zhang, B.-L. Neuronal state estimation for neural networks with two additive time-varying delay components. IEEE Trans. Cybern. 2017, 47, 3184–3194. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wang, Z.; Liu, D. A comprehensive review of stability analysis of continuous-time recurrent neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1229–1262. [Google Scholar] [CrossRef]
- Zhang, X.; Han, Q.; Ge, X.; Ding, D. An overview of recent developments in Lyapunov-Krasovskii functionals and stability criteria for recurrent neural networks with time-varying delays. Neurocomputing 2018, 313, 392–401. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Han, Q.-L. Global asymptotic stability analysis for delayed neural networks using a matrix-based quadratic convex approach. Neural Netw. 2014, 54, 57–69. [Google Scholar] [CrossRef] [PubMed]
- Xiao, S.; Xu, L.; Zeng, H.; Teo, K. Improved stability criteria for discrete-time delay systems via novel summation inequalities. Int. J. Control Autom. Syst. 2018, 16, 1592–1602. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Han, Q.-L.; Seuret, A.; Gouaisbaut, F.; He, Y. Overview of recent advances in stability of linear systems with time-varying delays. IET Control Theory Appl. 2019, 13, 1–16. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, X.; Han, Q. Event-triggered generalized dissipativity filtering for neural networks with time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 77–88. [Google Scholar] [CrossRef] [PubMed]
- Ke, Y.; Miao, C. Stability and existence of periodic solutions in inertial BAM neural networks with time delay. Neural Comput. Appl. 2013, 23, 1089–1099. [Google Scholar]
- Ke, Y.; Miao, C. Stability analysis of inertial Cohen-Grossberg -type neural networks with time delays. Neurocomputing 2013, 117, 196–205. [Google Scholar] [CrossRef]
- Ke, Y.; Miao, C. Exponental stability of periodic solutions for inertial Cohen-Grossberg-type neural, networks. Neural Netw. World. 2014, 4, 377–394. [Google Scholar] [CrossRef]
- Ke, Y.; Miao, C. Exponential Stability of Periodic Solutions for Inertial Type BAM Cohen-Grossberg Neural Networks. Abstr. Appl. Anal. 2014, 2014, 857341. [Google Scholar]
- Li, X.; Li, X.; Hu, C. Some new results on stability and synchronization for delayed inertial neural networks based on non-reduced order method. Neural Netw. 2017, 96, 91–100. [Google Scholar] [CrossRef] [PubMed]
- Cao, J.; Wan, Y. Matrix measure strategies for stability and synchronization of inertial BAM neural network with time delays. Neural Netw. 2014, 53, 165–172. [Google Scholar] [CrossRef] [PubMed]
- Lakshmanan, S.; Prakash, M.; Lim, C.P. Synchronization of an Inertial Neural Network With Time-Varying Delays and Its Application to Secure Communication. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 195–207. [Google Scholar] [CrossRef] [PubMed]
- Prakash, M.; Balasubramaniam, P.; Lakshmanan, S. Synchronization of Markovian jumping inertial neural networks and its applications in image encryption. Neural Netw. 2016, 83, 86–93. [Google Scholar] [CrossRef] [PubMed]
- Rakkiyappan, R.; Premalatha, S. Chandrasekar, A. Stability and synchronization analysis of inertial memristive neural networks with time delays. Cogn. Neurodyn. 2016, 10, 437–451. [Google Scholar] [CrossRef] [PubMed]
- Ruimei, Z.; Deqiang, Z.; Park, J.H. Quantized Sampled-Data Control for Synchronization of Inertial Neural Networks With Heterogeneous Time-Varying Delays. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1–11. [Google Scholar]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ke, L.; Li, W. Exponential Synchronization in Inertial Neural Networks with Time Delays. Electronics 2019, 8, 356. https://doi.org/10.3390/electronics8030356
Ke L, Li W. Exponential Synchronization in Inertial Neural Networks with Time Delays. Electronics. 2019; 8(3):356. https://doi.org/10.3390/electronics8030356
Chicago/Turabian StyleKe, Liang, and Wanli Li. 2019. "Exponential Synchronization in Inertial Neural Networks with Time Delays" Electronics 8, no. 3: 356. https://doi.org/10.3390/electronics8030356